Устройство и способ определения отклонения двух тел от заданного положения - RU2653771C2
Код документа: RU2653771C2
Чертежи



Описание
Изобретение относится к устройству и способу обнаружения отклонения заданного положения двух тел, включающее первое измерительное устройство, устанавливаемое на первом теле, второе измерительное устройство, устанавливаемое на втором теле, и вычислительное устройство.
Кроме того, подобное устройство может иметь альтернативное или дополнительное применение для определения ориентации двух тел, в частности, валов, относительно друг друга.
Обычно в системах указанного типа, по меньшей мере, одно из таких двух измерительных устройств имеет источник света, генерирующий световой луч, точка падения которого приходится на один или более чувствительных элементов на другом измерительном устройстве, или – на чувствительный элемент на самом измерительном устройстве, несущем источник света, при этом второе измерительное устройство служит для отражения этого луча света. Как правило, взаимную ориентацию тел, например, валов, определяют по положению точки падения светового луча в различных угловых положениях при вращении. Для этого измерительные устройства перемещают вдоль круглой поверхности валов, или устанавливают на круглой поверхности вращающихся валов.
В документах DE 3320163 Al и DE 3911307 Al описаны устройства контроля положения вала, в которых первое измерительное устройство испускает пучок света, который отражается зеркальной призмой второго измерительного устройства обратно на оптический датчик на первом измерительном устройстве.
В документе DE 3335336 Al описано устройство контроля положения вала, где каждое – первое и второе – измерительное устройство излучает пучок света и имеет оптический датчик, при этом каждый пучок света проецируется на датчик на другом измерительном устройстве.
Устройство контроля положения вала, работающее по этому принципу, описано также в патенте US 6873931 B1, где каждое из двух измерительных устройств оснащено парой датчиков ускорения по двум осям для автоматического определения угла вращения вала.
Устройство контроля положения вала известно из DE3814466 A1, где первое измерительное устройство испускает световой пучок, который падает на два оптических приёмника, установленных один за другим вдоль оси второго измерительного устройства.
Устройство контроля положения вала известно из WO 03/067187, где первое измерительное устройство излучает веерообразный пучок, который падает на два оптических датчика, расположенных один за другим вдоль оси на втором измерительном устройстве.
Устройство контроля положения вала известно из WO 00/28275 Al, где два измерительных устройства прикреплены по одному с каждого конца двух валов, при этом первое измерительное устройство генерирует веерообразный световой пучок, который латерально падает на три маркерных штырька, размещённых в плоскости второго измерительного устройства.
EP 0962746 A2 описывает устройство контроля положения вала, в составе которого первое устройство имеет источник пучка света одного цвета, расщепитель пучка и цветочувствительный ПЗС-детектор, а второе устройство имеет источник пучка света другого цвета и цветоделитель (дихроичный цветорасщепитель), который отражает первый цвет и пропускает второй; источник света второго устройства расположен, глядя со стороны первого устройства – позади цветоделителя, а источник света первого устройства расположен, глядя со стороны второго устройства – позади светоделителя. Пучок света, сгенерированный первым устройством, сначала проходит сквозь светоделитель первого устройства, а затем отражается цветоделителем второго устройства. Этот отражённый пучок, в свою очередь, отражается светоделителем первого устройства и попадает на чувствительный элемент. Пучок света второго устройства сначала проходит через цветоделитель второго устройства, а затем отражается светоделителем первого устройства в сторону чувствительного элемента.
В документе EP 2093537 Al описано устройство контроля положения вала, в составе которого первое измерительное устройство излучает веерный пучок света, который падает на два полосковых оптических детектора второго измерительного устройства, размещённых латерально параллельно на расстоянии друг от друга, при этом долготное направление детекторов перпендикулярно плоскости веерного пучка света.
Во всех упомянутых выше устройствах контроля положения вала точку падения светового пучка на поверхность датчика точно определяют вычислением.
Из DE 4041723Al известно устройство для определения положения точки измерения относительно опорной точки для управления или контроля при бурении скважин, включающее несколько измерительных станций, размещённых в скважине или на бурильной головке, на каждой из которых установлена камера с маркировочной отметкой, где каждая камера записывает маркировочную отметку соседней камеры или измерительной станции.
Из патента WO 2010/042039Al известно устройство контроля центровки валов, в котором каждое из двух измерительных устройств оснащено камерой, помещённой в корпус, при этом сторона корпуса, обращённая к другому устройству, снабжена оптическим рисунком, фиксируемым противоположной камерой. Сторона корпуса с нанесённым рисунком в каждом случае снабжена отверстием, сквозь которое проецируется противоположный рисунок. Возможен вариант конструктивного решения, при котором одно из этих двух устройств оборудовано только камерой, без рисунка, в то время как другое устройство не имеет камеру, но снабжено трёхмерным рисунком.
EP 1211480A2 раскрывает устройство контроля центровки валов, в котором первое измерительное устройство снабжено источником света, который направляет световой пучок на второе измерительное устройство, оснащённое матовым экраном; на сторону матового экрана, обращённую в противоположную от первого измерительного устройства сторону, нанесён специальный оптический рисунок на регистраторе изображения, который одновременно является элементом второго измерительного устройства.
В DE 10143812 Al и DE 10117390 Al описано устройство контроля центровки валов, в котором первое измерительное устройство имеет источник света, излучающий веерообразный пучок, а расположенное напротив него второе измерительное устройство имеет частично отражающую оптическую систему с обращённым назад (отражающим) матовым экраном и камеру, регистрирующую сторону матового экрана, обращённую в противоположную сторону от первого измерительного устройства, при этом первичное световое пятно пучка падает непосредственно от источника света, а вторичное световое пятно пучка отражается от частично отражающей оптической системы второго измерительного устройства и отражателя на передней стороне первого измерительного устройства.
От компании WenteCamSorikGmbH, 38108 Брауншвейг, Германия доступен лазерный приёмник с камерой для машинного измерения под фирменным наименованием LaserTrac.
Из EP 2801788 A1 известно устройство для определения положения двух механических элементов или тел относительно друг друга, в составе которого первое измерительное устройство для установки на первом механическом элементе или первом теле из двух механических элементов или тел имеет средство генерации по меньшей мере одного пучка световых лучей, зону рассеивания подающего на неё света и камеру для регистрации изображений зоны рассеивания. Данное известное устройство дополнительно или отдельно может применяться для обнаружения или определения отклонения тел от заданного положения. В этом известном решении камера закреплена сбоку под углом к зоне рассеивания, при этом оптическая ось камеры, соответственно, ориентирована не перпендикулярно к зоне рассеивания. Второе измерительное устройство, размещаемое на втором механическом элементе или на втором теле, имеет отражатель, обращённый к первому измерительному устройству, притом что измерительные устройства закреплены на рассматриваемых механических элементах или телах для отражения пучка световых лучей на зону рассеивания. Это известное конструктивное решение дополнено процессором, обеспечивающим нахождение точки падения пучка световых лучей, отражённых от отражателя на зону рассеивания, с использованием видеоданных с камеры и исходя из этого – определение положения первого тела и второго тела относительно друг друга, или– дополнительно или отдельно– обнаружение или вычисление отклонения тел от их соответствующих заданных положений. Для определения координат центра точек падения необходимо, чтобы искажения перспективы оптической системы, вызванные отклонением ориентации камеры от перпендикуляра относительно зоны рассеивания, были скорректированы посредством сложного процесса, включающего анализ изображений, зафиксированных камерой.
Технической задачей настоящего изобретения является устройство и способ для простого и удобного выявления или определения отклонения двух тел от заданного взаимного положения на основе зафиксированных видеокамерой изображений точек падения пучка световых лучей на область отражения.
Поставленная задача достигается за счёт применения устройства с признаками по пункту 1 и способом по пункту 10 формулы изобретения.
Согласно изобретению устройство для выявления или определения отклонения двух тел от заданного взаимоположения отличается, в частности, тем, что второе измерительное устройство, т.е. измерительное устройство, имеющее отражатель, оснащено видеокамерой для регистрации изображений области рассеивания. В отличие от технического решения, известного из EP 2801788 A1, камера, регистрирующая изображения области рассеяния, в конструктивном исполнении по настоящему изобретению установлена не на первом измерительном устройстве, т.е. – не на измерительном устройстве, несущем средство генерации, по меньшей мере, одного пучка световых лучей и имеющем участок рассеяния света, падающего на рассеивающую поверхность. Преимущество здесь заключается в том, что оптическая ось камеры при расположении измерительных устройств на объектах может быть сориентирована перпендикулярно или почти перпендикулярно к области рассеяния. Это невозможно в варианте решения, известного из EP 2801788 A1, так как это блокировало бы путь прохождения пучка лучей света. Преимущество перпендикулярной или близкой к перпендикулярной ориентации оптической оси камеры к области рассеяния состоит в отсутствии искажений перспективы, которые должны быть компенсированы ценой значительных усилий, известных из EP 2801788 A1, путём анализа изображений или видеоданных с камеры.
В целом, использование устройства по изобретению обеспечивает простое и практичное распознавание отклонения тел от заданного положения на основе зафиксированных камерой изображений области рассеяния, в особенности, по точкам падения пучка световых лучей на область отражения, соответственно, на основе точек падения пучка световых лучей на область рассеяния.
Вычислительное устройство реализовано с целью определения с использованием изображений с видеокамеры, по меньшей мере, одной точки падения пучка световых лучей, отраженного от отражателя на область рассеяния, и с целью выявления или измерения по данной точке падения отклонения текущего положения первого тела от заданного положения первого тела и/или отклонения положения второго тела от заданного положения второго тела. Для выявления или определения по точке падения отклонения текущего положения первого тела от заданного положения первого тела и отклонения текущего положения второго тела от заданного положения второго тела, вычислительное устройство может рассчитывать отклонение или смещение точки падения на область рассеяния светового пучка, отражённого отражателем, из положения опорной точки или из заданного положения, где опорным или заданным положением является положение отражённого пучка световых лучей, при котором первое тело находится в заданном положении для первого тела, а второе тело находится в заданном положении для второго тела. Отклонение или смещение может быть выражено, например, в виде разностей координат, количественно определяющих отклонения положения пучка света, отражённого на область рассеяния из опорного или заданного положения. Кроме того, для выявления отклонения тела или тел от заданного положения или заданных положений может быть достаточно, чтобы вычислительное устройство в случае отклонения от опорного или заданного положения точки падения светового пучка, отражённого отражателем на область рассеяния, отображало это отклонение или смещение, или сигнализировало о таком отклонении или смещении, например, световой индикацией. Положение первого или второго тела может быть охарактеризовано или обозначено, в частности, через ось первого или второго тела таким образом, чтобы при ссылке на положение первого тела или второго тела подразумевалось положение соответствующей оси первого или второго тела, например, в заранее заданной трёх координатной системе. Соответствующая ось может быть, допустим, продольной осью тела или любой другой произвольной осью, проходящей через тело.
Первое тело и/или второе тело может представлять собой любой произвольный объект, отклонение которого от заданного положения в трёхмерной системе координат или трёхмерной пространственной системе может быть обнаружено или определено с помощью устройства по изобретению. Так, первое и второе тела могут являться сочленёнными между собой валами, в заданном положении отцентрованными один относительно другого таким образом, что нежелательное отклонение от заданной ориентации может быть успешно выявлено с помощью устройства по изобретению. Смещение тела или тел может быть результатом, например, теплового расширения. В частности, причиной отклонения от взаимной центровки валов может служить тепловое расширение в рабочем режиме. В технологических системах устройство по изобретению может быть использовано, в частности, в режиме текущего контроля для подачи аварийного звукового сигнала, когда хотя бы один из элементов отклоняется от заданного положения, или отклоняется от заданного положения, по меньшей мере, на указанную величину хотя бы в одном указанном направлении в пространстве. Например, устройство по настоящему изобретению может быть очень успешно и эффективно применено в технических системах с двумя рабочими органами, подвергающимися постоянно изменяющемуся внешнему воздействию, скажем, таких как силовые установки на морских судах.
Практичность применения может быть повышена за счёт съёмной установки видеокамеры на отражателе в одном из вариантов реализации.
Особенно предпочтительным является вариант установки камеры съёмно на отражателе через монтажный кронштейн, который соответствующим образом крепится к отражателю. В этом случае монтажный кронштейн крепится к стороне отражателя, обращённой от области рассеяния. Монтажный кронштейн обеспечивает очень устойчивое и надёжное крепление. Крепление монтажного кронштейна к стороне отражателя в противоположном от области рассеяния направлении позволяет легко избежать помех на пути прохождения светового пучка.
В другом конструктивном решении второе измерительное устройство оснащено смартфоном с видеокамерой. Достоинство здесь – в том, что смартфон, как продукт массового потребительского рынка может быть приобретен по разумной цене или уже находиться во владении пользователя для других целей.
Смартфон также может быть успешно установлен с помощью монтажного кронштейна на стороне отражателя в противоположном от области рассеяния направлении с получением описанных выше преимуществ.
Для удобства обнаружения отклонения от заданного положения смартфон предпочтительно устанавливают на монтажном кронштейне съёмно, или съёмно с осевой подвижностью на опоре. Возможен вариант установки смартфона съёмно или съёмно с осевой подвижностью на отражателе без использования монтажного кронштейна. Особое удобство при использовании смартфона создаётся за счёт его подвижности, благодаря которой дисплей может быть хорошо виден пользователю. В крупных агрегатах с коротким валом данная система устанавливается очень близко к корпусу, в силу чего дисплей становится неудобочитаем, особенно когда смартфон установлен прямо. Осевая подвижность на опоре при этом имеет решающее значение. Наиболее предпочтительно устанавливать смартфон вертикально для достижения большего диапазона осевой подвижности на опоре.
В предпочтительном варианте компоновки смартфон включает вычислительное устройство. Предусмотрено использование вычислительного устройства в виде отдельного от смартфона анализатора данных, или в виде модуля анализа в составе аналитической системы, или в любой другой форме, знакомой специалисту в данной сфере. Видеоданные c камеры могут быть переданы на вычислительное устройство посредством любого вида связи, включая технологию обмена данными Bluetooth, или любой стандартный вид кабельной передачи информации, известный специалисту в данной области.
В одной из практических сфер применения данного устройства первое тело представляет собой первый вал, второе тело – второй вал, при этом первое измерительное устройство предназначено для размещения относительно круглой поверхности первого вала, а второе измерительное устройство предназначено для размещения относительно круглой поверхности второго вала. Рассматриваемое устройство снабжено, по меньшей мере, одним инклинометром для измерения угла поворота первого вала и/или второго вала в положении вращения. Вычислительное устройство предназначено для определения горизонтального и/или вертикального углового рассогласования и/или горизонтального параллельного рассогласования и/или вертикального параллельного рассогласования первого и/или второго вала с учётом заданного положения первого и/или второго вала на основе измерений угла поворота в различных положениях вращения первого и/или второго вала и точки (или точек) падения пучка световых лучей, отражённого отражателем на область рассеяния в этих положениях вращения.
Количество разных положений при вращении первого и/или второго вала вокруг своих осей вращения, которые требуются для выявления или определения горизонтального углового смещения и/или вертикального углового смещения и/или горизонтальной непараллельности и/или вертикальной непараллельности первого и/или второго вала относительно заданного положения первого и/или второго вала, равно, по меньшей мере, пяти для одного вала, когда только один из валов перемещается в разные положения вращения, или – по меньшей мере, три, когда каждый из этих двух валов перемещается в разные положения вращения.
В указанном выше специализированном варианте компоновки первое измерительное устройство предпочтительно оснащено первым инклинометром для измерения угла поворота первого вала в положении вращения, и второе измерительное устройство оснащено вторым инклинометром для измерения угла поворота второго вала в положении вращения; первый или второй инклинометр может быть использован также для измерения люфта (так называемого „мёртвого хода“) в узле сочленения двух валов.
Если второе измерительное устройство оснащено смартфоном с камерой (см. также выше), то, по меньшей мере, один первый инклинометр или один второй инклинометр может быть вмонтирован в смартфон. Таким образом, использование инклинометра, встроенного в существующий смартфон, для измерения угла отклонения значительно упрощает использование устройства.
При осуществлении способа выявления отклонения от заданного положения двух тел по данному изобретению первое измерительное устройство размещают на первом из этих двух тел, а второе измерительное устройство размещают на втором из этих двух тел. Далее, первое измерительное устройство генерирует световой пучок, который с помощью отражателя на втором измерительном устройстве отражается на область рассеяния первого измерительного устройства, после чего видеокамера второго измерительного устройства фиксирует, по меньшей мере, одно изображение области рассеивания. Такое, по меньшей мере, одно изображение оценивается для нахождения по меньшей мере одной точки падения (WV, PV) светового пучка, отраженного отражателем на область рассеяния, и для выявления исходя из этого отклонения текущего положения первого тела от его заданного положения и/или отклонение текущего положения второго тела от его заданного положения.
Способ по настоящему изобретению отличается также, в частности, тем, что в отличие от технического решения, известного из EP 2801788 A1, второе измерительное устройство, т.е.измерительное устройство с отражателем, имеет камеру для записи изображений области рассеивания, или тем, что, по меньшей мере, одно изображение области рассеивания записывается камерой второго измерительного устройства, что может быть причислено к уже указанным преимуществам.
Для выявления или определения отклонения положения первого тела от заданного положения первого тела и/или отклонения положения второго тела от заданного положения второго тела из хотя бы одной точки падения [светового луча]согласно способу по настоящему изобретению предпочтительно определять или выявлять отклонение (смещение) пучка световых лучей, отражённого от отражателя на область рассеяния, от опорного или заданного положения в области рассеяния. За опорное или заданное положение отражённого пучка света принимают положение, когда первое тело находится в заданном положении для первого тела, а второе тело находится в заданном положении для второго тела. Чтобы определить опорное или целевое положение, когда первое измерительное устройство размещено на первом теле, а второе измерительное устройство размещено на втором теле, видеокамера второго измерительного устройства регистрирует, по меньшей мере, одно изображение области рассеивания при нахождении первого тела в положении, заданном для первого тела, а второе тело находится в положении, заданном для второго тела, после чего это изображение анализируют, находя или вычисляя заданное или опорное положение в области рассеяния. Поскольку тела ещё не находятся в заданных для них положениях, их устанавливают в эти положения.
Отклонение или смещение может быть детерминировано, например, дифференциацией координат, квантифицирующей девиацию в позиционировании рефлексного оптического пучка в ареале диффузии относительно реперной или заданной локализации. Для выявления отклонения тела или тел от заданного положения или заданных положений может быть достаточным визуальное отображение отклонения или смещения от опорных или заданных координат точки падения на область рассеяния светового пучка, отражённого отражателем, или сигнализация такого отклонения посредством, например, предупреждающей или уведомляющей индикации.
Ещё одним преимуществом технического решения данного изобретения является возможность воплощения простой и гибкой системы благодаря использованию видеокамеры и области рассеяния, проецируемой на эту камеру, а не на светочувствительный элемент, непосредственно на который падает отражённый световой пучок. Особенно важно, что в предлагаемой компоновке может быть использована недорогая камера массового спроса, например, фотокамера или камера смартфона, которая уже находится в употреблении для других целей.
В одном из конструктивных решений отражатель имеет первую обратнонаправленную [отражающую] поверхность и вторую обратнонаправленную поверхность, расположенные под углом друг к другу таким образом, что световой пучок отражается от первой обратнонаправленной поверхности на вторую обратнонаправленную поверхность, а затем – в направлении области рассеяния.
Предпочтительно, если первая и вторая обратнонаправленные поверхности отражателя расположены почти перпендикулярно друг к другу, или первая и вторая обратнонаправленные поверхности отражателя расположены почти вертикально друг к другу, а отражатель выполнен в виде призмы, призмы Порро или треугольной призмы.
Особенно предпочтительно, если одна из поверхностей отражателя, обращённая к первому измерительному устройству, выполнена так, чтобы отражать часть светового пучка на область рассеяния, а другую часть светового пучка пересылать на другую обратнонаправленную поверхность.
Другим техническим решением предусмотрено, что световой пучок является первым световым пучком, а средство генерации первого светового пучка генерирует также второй световой пучок.
Эти два световых пучка излучаются в основном в одном и том же направлении, но различаются спектрально. Поверхность отражателя, обращённая на первое измерительное устройство, выполнена в виде цветоделителя и в силу этого лучше отражает первый световой пучок, чем второй, и лучше проводит второй световой пучок, чем первый. Отражатель снабжён, по меньшей мере, одной первой обратнонаправленной поверхностью для отражения второго светового пучка, проходящего через поверхность, обращённую на первое измерительное устройство.
Ребро призмы преимущественно сориентировано тангенциально относительно круглой поверхности вала.
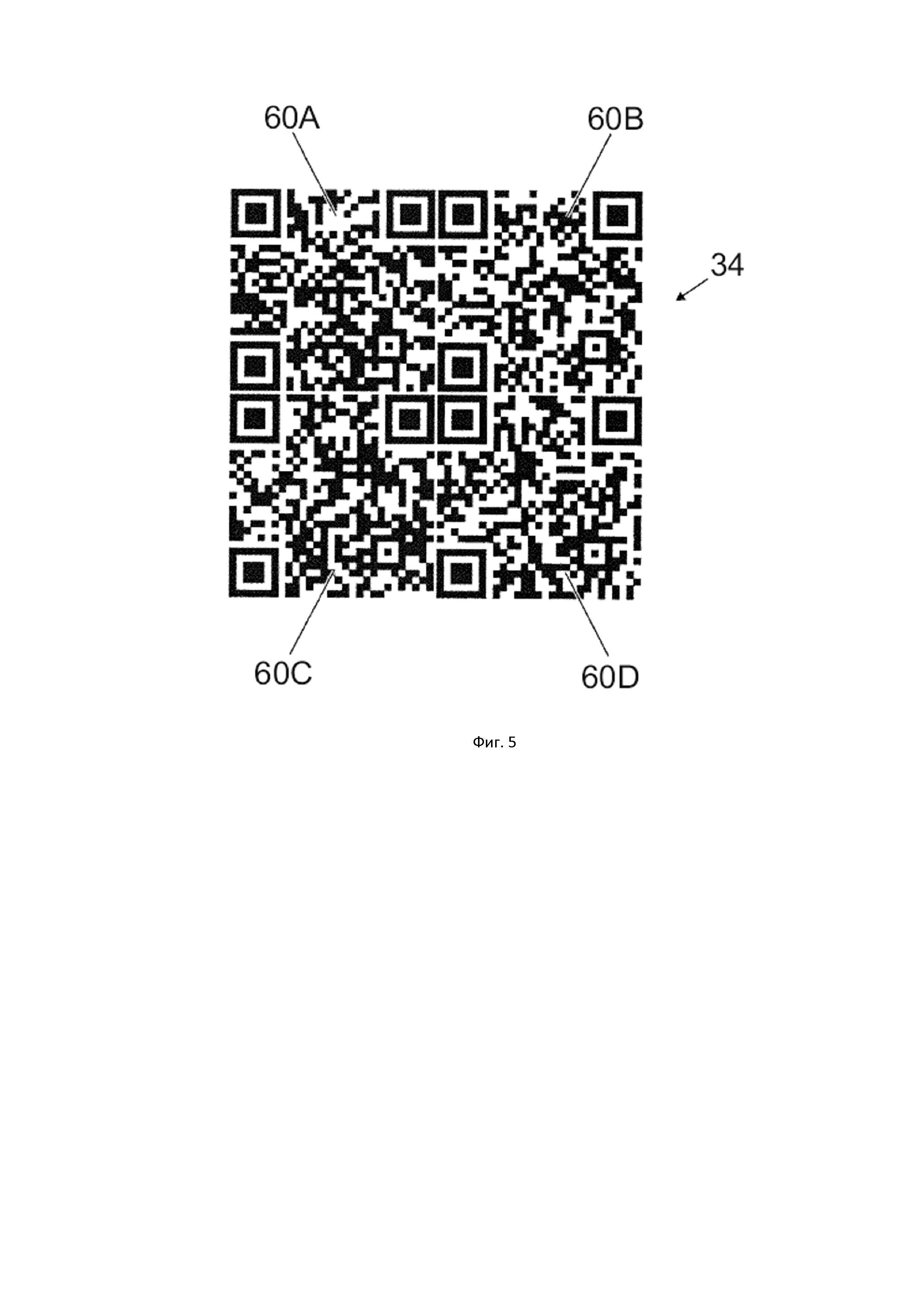
В одном из предпочтительных вариантов исполнения в области рассеяния нанесены реперные маркеры и/или распределёно множество графических кодов (60A, 60B, 60C, 60D), кодирующих данные, относящиеся к области рассеяния и/или к измерительному устройству, снабжённому этой областью рассеяния.
Камера преимущественно имеет линзу с фиксированным фокусным расстоянием.
Примеры, более наглядно иллюстрирующие изобретение, приведены ниже со ссылкой на сопроводительные фигуры. В частности, на фигурах дана следующая детализация: на фиг. 1 показан схематический вид сбоку первого варианта реализации устройства по изобретению; на фиг.2показан схематический вид сбоку второго варианта реализации устройства по изобретению; на фиг.3показан вид спереди области рассеяния устройства, данного на фиг. 1 и 2;на фиг. 4 показан вид в перспективе первого измерительного устройства в одном из вариантов реализации устройства по изобретению; и на фиг.5приведён пример области рассеяния с четырьмя QR-кодами.
На фиг. 1 устройство 8 для определения взаимоположения первого тела 10, представляющего собой вал 10, и второго тела 12, представляющего собой вал 12, включает первое измерительное устройство 14, установленное на первом теле 10, второе измерительное устройство 18, устанавливаемое на втором теле 12, и вычислительное устройство 22. Первое измерительное устройство 14 имеет установочный элемент 16 для размещения на круглой поверхность вала 10, и второе измерительное устройство 18 имеет элемент 20 для размещения на круглой поверхности вала 12. Установочные элементы 16, 20 снабжены штырьками 9 (см. фиг. 4, где они показаны только для элемента 16) для регулировки по высоте. Так, например, на таких штырьках 9 установлен отражатель 38 с возможностью регулировки по высоте.
Первое измерительное устройство 14 имеет средство 24 генерации светового пучка 28, выполненное в виде источника 24 лазерного излучения. В дополнение к этому первое измерительное устройство 14 имеет область рассеяния 34 падающего на неё света (WV, PV, см также фиг. 3).
Второе измерительное устройство 18 имеет отражатель 38, который при установке измерительных устройств 14, 18 соответственно на тела 10, 12 обращён к первому измерительному устройству 14 для отражения светового пучка 28 на рассеивающую поверхность 34.
В дополнение к этому на втором измерительном устройстве 18 установлена видеокамера 36 для регистрации изображений области рассеивания 34.
На втором измерительном устройстве 18 установлен также смартфон 15 со встроенной видеокамерой 36.
Смартфон 15 присоединен к отражателю 38 с помощью монтажного кронштейна 11. Монтажный кронштейн 11 присоединен к стороне 13 отражателя 38, обращённой в противоположную сторону от области рассеяния 34. Смартфон 15 установлен съёмно с осевой подвижностью относительно монтажного кронштейна 11.
Таким образом, первое тело 10 представляет собой первый вал 10, а второе тело 12 представляет собой второй вал 12.
Первое измерительное устройство 14 предназначено для установки относительно круглой поверхности первого вала 10, а второе измерительное устройство 18 предназначено для установки относительно круглой поверхности второго вала 12.
Первое измерительное устройство 14 имеет первый инклинометр 17 для измерения угла поворота первого вала 10 в положении вращения, и второе измерительное устройство 18 имеет второй инклинометр 19 для измерения угла поворота второго вала 12 в положении вращения. Таким образом, измерение соответствующего угла поворота выполняется путём измерения угла наклона соответствующего измерительного устройства 14, 18 соответствующим инклинометром 17, 19. Поскольку вычислительное устройство 22 встроено или установлено на смартфоне 15, показатели угловых величин инклинометров 17, 19 передаются посредством Bluetoothна смартфон 15 и, соответственно, на вычислительное устройство 22. Технология Bluetooth может также обеспечить защиту соответствующего программного приложения от несанкционированного злонамеренного проникновения какого-либо нежелательного пользователя с лазерной указкой и листом металла, который мог бы нанести вред системе измерений и вычислений. Приложение может быть настроено таким образом, что, однажды введя параметры размеров, измерения можно будет выполнять нажатием кнопки „Пуск“ (или, возможно, подачей голосовой команды).
Вычислительное устройство 22 выполнено с возможностью нахождения по изображению, полученному с видеокамеры 36, по меньшей мере одной точки падения светового пучка 28, отражённого отражателем 38 на область рассеяния 34 в различных положениях при вращении первого и/или второго вала 10, 12, и выявления по этой точке падения отклонения положения первого вала 10 от его заданного положения и отклонения положении второго вала 12 от его заданного положения. Если валы 10, 12 расположены в своих заданных положениях, они сориентированы таким образом, что отцентрованы относительно друг друга.
Кроме того, вычислительное устройство 22 выполнено с возможностью определения горизонтального углового смещения и/или вертикального углового смещения и/или горизонтальной непараллельности и/или вертикальной непараллельности первого и/или второго вала 10, 12 по сравнению с заданным положением первого и/или второго вала 10, 12 исходя из угла поворота первого и/или второго вала, измеренного в разных положениях вращения, и исходя из точки (точек) падения светового пучка, отражённого отражателем 38 на область рассеяния в этих положениях вращения.
Источник света 24 установлен с возможностью вращения в направлениях вверх и вниз (не показано).
В иллюстративном примере осуществления способа (см.фиг. 1) для определения отклонений от заданного взаимного положения двух валов 10, 12 первое измерительное устройство 14 размещают на первом валу 10 и второе измерительное устройство 18 размещают на втором валу 12. Далее, световой пучок 28, генерируемый первым измерительным устройством 14, отражается от отражателя 38 на втором измерительном устройстве 18 на область рассеяния 34 на первом измерительном устройстве 14. По меньшей мере одно изображение области рассеивания 34, зафиксированное камерой 36 второго измерительного устройства 18, анализируют для выявления по меньшей мере одной точки падения (WV, PV) на область рассеяния 34 светового пучка, отражённого отражателем, и для определения, исходя из этого, отклонения текущего положения первого тела от заданного положения первого тела и отклонения текущего положения второго тела от заданного положения второго тела.
При этом изображения области рассеивания 34 могут быть зафиксированы при разных положениях вращения валов 10, 12 с последующим анализом этих изображений для выявления при этих различных положениях вращения точки падения светового пучка 28, отражённого отражателем 38 на область рассеяния 34, и для определения, исходя из этого и из угла поворота различных положений вращения, измеренных инклинометрами 17, 19, горизонтального углового смещения и/или вертикального углового смещения и/или горизонтальной непараллельности и/или вертикальной непараллельности первого и второго вала относительно заданного положения первого и/или второго вала 10, 12.
В зависимости от модели смартфона и оптики камеры между областью рассеяния 34 и камерой 36 сохраняют минимальное расстояние для обеспечения надлежащей фокусировки камеры 36. Это расстояние может быть большим.
При установке измерительных устройств 14, 18 на валах 10, 12 оптическую ось 39 камеры 36 ориентируют перпендикулярно или почти перпендикулярно к области рассеяния 34.
Валы 10 и 12 в заданных положениях отцентрованы соосно или максимально близко к соосности относительно базисной оси 26; устройство 8 с двумя измерительными устройствами 14, 18 предназначено в том числе для выявления или определения возможного горизонтального углового смещения и/или вертикального углового смещения и/или горизонтальной несоосности и/или вертикальной несоосности относительно базисной оси 26. Как правило, рассматриваемое устройство включает средства индикации результатов, в частности по угловому смещению или несоосности (на фигурах не отображено).
В дополнение к источнику света 24, генерирующему световой пучок 28, первое измерительное устройство 14 включает коллиматор (не показан) для коллимации (сведения в параллельный пучок) лучей света в пучке 28.
Камера 36 снабжена оптикой (не показано), обеспечивающей проецирование области рассеяния 34 на светоприёмник камеры (не показан). Область рассеяния 34 обращена ко второму измерительному устройству 18, когда два измерительных устройства 14, 18 выставлены в положение измерения. Возможен вариант размещения источника света 24 сзади области рассеяния 34 (не проиллюстрировано) в пределах видимости второго измерительного устройства 18, когда световой пучок 28 испускается сквозь отверстие в области рассеяния 34.
Отражатель 38 имеет первую обратнонаправленную[отражающую] поверхность 42 и вторую обратнонаправленную поверхность 44; отражающие поверхности 42, 44 расположены под углом (как правило, прямым) друг к другу, образуя между собой ребро 46; в приведённых примерах отражатель выполнен в виде призмы Порро (или крышеобразной призмы), у которой плоскости двух параллельных боковых граней имеют форму равных прямоугольных треугольников, соединённых между собой смежными прямоугольными гранями, расположенными под прямым углом к плоскостям треугольников. Ребро 46 призмы расположено по касательной к круглым поверхностям валов 10, 12.
Область рассеяния 34 своей тыльной частью (глядя от второго измерительного устройства 18) наложена на корпус 32 первого измерительного устройства 14, который содержит также источник света 24 и соответствующую схемотехнику. Для минимизации чувствительности к колебаниям предпочтительно использовать случайно-импульсный источник излучения 24. Кроме вышеуказанного, в корпусе 32 размещён источник питания (элементы питания или аккумуляторные батареи) источника света 24 и соответствующие контуры управления питанием. Общая толщина корпуса 32 не должна превышать толщину штырьков 9 для его размещения на установочном элементе 16 (см. фиг. 4).
В корпус 32 может быть встроен инклинометр 17 (см фиг. 1, 2) с индикатором 33 (см фиг. 3). Инклинометр 17 может быть выполнен по технологии МЭМС (MEMS = микроэлектромеханических систем).
Первое измерительное устройство 14 предпочтительно имеет конструкцию, при которой пучок или пучки света 28, 30 от источника излучения 24 нацелены непосредственно на отражатель 38 второго измерительного устройства 18 без использования какого-либо промежуточного отражающего элемента между источником 24 и отражателем 38.
Вариант реализации, проиллюстрированный на фиг. 2, отличается от варианта реализации на фиг. 1 тем, что отражатель 38 снабжён фронтальной поверхностью 40. Эта фронтальная поверхность 40 выполнена с возможностью частичного отражения светового пучка 28; первая составляющая 28' светового пучка отражается от фронтальной поверхности 40 в направлении области рассеяния 34, одновременно вторая составляющая 28'' светового пучка 28 проходит сквозь фронтальную поверхность 40 в направлении второй обратнонаправленной поверхности 44, отражается от неё на первую обратнонаправленную поверхность 42, и оттуда – через фронтальную поверхность 40 в направлении области рассеяния 34.
В приведённых на фигурах примерах точки падения (световые точки) пучков света 28' и 28'' на область рассеяния 34 обозначены как WV и PV.
Способность фронтальной поверхности 40 отражать световой пучок 28 предпочтительно рассчитывают таким образом, чтобы интенсивность двух отражённых световых пучков 28' и 28'' была разной, обеспечивая таким образом различие между двумя точками падения WV и PV на область рассеяния 34.
При реализации по варианту на фиг. 2 устройство по изобретению может быть оборудовано источником света 24, способным излучать второй световой пучок 30 (обозначенный на фиг. 2 пунктиром) в дополнение к первому световому пучку 28, таким образом, что эти два световых пучка 28, 30 будут испускаться в одном общем направлении, но отличаться по спектру (например, источник излучения 24 может быть выполнен в виде двухволнового лазерного диода, эмитирующего световой пучок с длиной волны приблизительно 660 нм в красном спектре и световой пучок приблизительно 780 нм в инфракрасном спектре; как вариант источник света 24 может иметь два лазерных диода разных цветов).
В подобном случае фронтальная поверхность 40 отражателя 38 выполняет функции цветоделителя; она может быть выполнена, например, с возможностью сильнее отражать лучи первого светового пучка 28, чем второго светового пучка 30, и, соответственно, с большей пропускающей способностью для второго светового пучка 30, чем для первого светового пучка 28. Тогда, световой пучок, обозначенный на фиг. 2 как 28'', соответствует второму световому пучку 30 после того, как он был пропущен фронтальной поверхностью 40 и отражён двумя обратнонаправленными поверхностями 42, 44. И тогда световой пучок, обозначенный на фиг. 2 как 28’, соответствует первому световому пучку 28, отражённому фронтальной поверхностью 40.
Таким образом, две точки падения WV и PV различаются по спектральному составу и могут быть легко разделены с помощью цветочувствительной видеокамерой 36.
В варианте компоновки на фиг. 2 точка падения WV (фиг. 3) светового пучка 28', отражённого от фронтальной поверхности 40, показывает величину углового смещения двух валов 10, 12, а точка PV падения светового пучка 28'', отражённого от двух обратнонаправленных поверхностей 42, 44, показывает величину несоосности этих двух валов 10, 12.
На область рассеяния 34 (фиг. 3) нанесены масштабные маркеры 50, например, крестообразной формы, для упрощения анализа изображений области рассеивания 34, зарегистрированных камерой 36. Может быть добавлен внешний источник света, такой как СИД (не показан), чтобы маркеры 50 были видны в темноте. Внешний СИД-источник света для подсветки области рассеяния также может быть установлен на смартфоне 15. Возможен вариантфоновой подсветки (не показано) области рассеяния 34. Например, в листе металлизированной фольги можно сделать соответствующие вырезы и приклеить его к матовой поверхности из стекла или пластика таким образом, что рассеянный белый свет будет проникать через корпус 32. Область рассеяния 34 преимущественно выполняется плоской или в основном плоской.
Область рассеяния 34 может быть смещена назад (не показано) для лучшего распределения массы устройства натяжения (см. также фиг. 4). Также имеется плата (не показана) с отверстием для светочувствительного датчика (в самом низу, не показан) и Bluetooth. Светочувствительный датчик предназначен для настройки выхода лазерного луча по уровню внешней засветки.
В устройствах на фиг. 1 и 2 камера 36 размещена и оснащена из расчёта отображения всей или как можно большей части области рассеяния 34.
Камера 36 предпочтительно укомплектована оптикой со стационарными линзами. В ином случае камера 36 смартфона 15 может быть оснащена трансфокатором. Разрешающая способность камеры предпочтительно составляет, по меньшей мере, 8 мегапикселей. Камера преимущественно работает в режиме макросъёмки.
Поскольку камера 36 сопряжена с или встроена в смартфон 15, дисплей смартфона удобно использовать как графический интерфейс пользователя (ГИП / GUI); в другом случае оператор для управления может использовать дополнительное устройство подобного типа, например, смартфон или планшетный компьютер. Также успешно могут быть использованы головной микротелефон или гарнитура „Гугл гласс/ GoogleGlass“.
Камера 36 устройства на фиг. 1 и 2 предпочтительно снабжена функцией OCR (оптического распознавания символов), чтобы считывать показатели угла наклона, отображаемого на дисплее инклинометра 17 или 19. Предусмотрен также вариант прямой передачи величины угла на камеру 36, например, через Bluetooth.
Поскольку камера 36 является камерой 16 смартфона 15, инклинометр, часто встроенный в него, также может служить для определения угла наклона.
При анализе изображений с камеры 36 может быть сделана коррекция систематических ошибок, вызванных, например ребром призмы 46.
Анализ изображений выполняют с использованием вычислительного устройства 22, которое может включать компонент камеры, в особенности, если камера 36 сопряжена со смартфоном 15, поскольку вычислительное устройство обладает достаточно большой вычислительной мощностью.
Перед началом измерения с помощью устройства на фиг. 2 два измерительных устройства 14, 18 сначала выставляют относительно друг друга, чтобы отражённые световые пучки 28', 28'' падали приблизительно в центр области рассеяния 34 (на фиг. 2 не отображено). Для этого, например, второе измерительное устройство 18 может быть снабжено механизмом регулировки высоты (не показан), позволяющим юстировать положение второго измерительного устройства 18 в радиальном направлении относительно вала 12, и механизмом регулировки угла наклона второго измерительного устройства 18 относительно радиального направления вала 12 с возможностью регулировки положения вокруг радиального направления.
После выставления двух измерительных устройства 14, 18 с установленными на них измерительными устройствами 14, 18 относительно друг друга точки падения отражённых световых пучков 28', 28'' в принципе должны индицировать рассогласование между ними при вращении вокруг оси 26; после этого можно отследить и проанализировать обычным способом траекторию каждой точки падения[светового пучка] в зависимости от угла поворота (который в свою очередь может быть определен с помощью инклинометра) для выявления горизонтального углового смещения и/или вертикального углового смещения и/или горизонтальной несоосности и/или вертикальной несоосности валов 10, 12, в особенности – относительно заданного положения первого и второго вала 10, 12 (такая методика описана, например, в DE 3911307 A1 для одного светового пучка).
Если отражатель 38 устройства на фиг. 2 выполнен в форме треугольной призмы, точка падения пучка света 28'', отраженного обратнонаправленными плоскостями 42, 44, указывает на несоосность в обоих направлениях.
После выявления рассогласования или отклонения от заданного положения выполняют регулировку валов 10, 12 в определённом угловом положении; в процессе такой регулировки валов выполняют измерения для установления момента наиболее эффективной корректировки такого рассогласования. Такая методика описана, например, в DE 3911307 Al.
Если используется треугольная призма, юстировка валов может осуществляться, например, в положении „12 часов“ этих двух измерительных устройств 14, 18. Если используется призма Порро (или крышеобразная призма), юстировка валов может выполняться, например, в положениях „3 часа“ или „9 часов“.
В процессе выполнения измерений ориентации в ходе выставления валов камера работает в режиме регистрации изображений области рассеивания 34 непрерывно и с достаточно высокой частотой; за одну секунду может быть сделано порядка пяти снимков. В силу того, что камера сопряжена с или встроена в смартфон, регистрация и оценка изображений могут выполняться, например, с использованием соответствующих программных приложений (см. также выше).
Возможен режим непрерывной записи изображений, при котором снимок делается, например, исходя из текущего угла наклона, допустим, каждый раз, когда угол меняется на определённую величину, например, на 1°.
Комплектация устройств по изобретению на фиг. 1 и 2 может в качестве опции включать головную гарнитуру Bluetooth, которую оператор, ответственный за регулировку валов, носит на голове и получает по беспроводной связи акустические сигналы со значениями рассогласования, рассчитанными вычислительным устройством 22. В этом заключается больше преимущество, так как оператору бывает трудно в ходе выполнения операции отладки следить за показаниями на дисплее смартфона 15. С помощью головной гарнитуры Bluetooth можно также осуществлять голосовое управление смартфоном 15.
Кроме того, возможен подход, при котором оператор, используя второй смартфон или планшетный компьютер, следит за показаниями смартфона 15, выполняющего функции видеокамеры, управляемой по каналу Bluetooth(например, VNC), в более удобочитаемом для себя виде; управление смартфоном 15 можно также осуществлять через второй смартфон или планшетный компьютер с помощью сенсорного экрана (см также WO 97/36146).
Проецируемая поверхность обычно составляет примерно 40 х 40 мм; пиксель, таким образом, соответствует 20 мкм из расчёта разрешающей способности камеры в 8 мегапикселей (что соответствует примерно 2 500 пикселям по вертикали). То есть, если применить компактную камеру с разрешением, предположим, 16 мегапикселей, то можно достичь разрешающей способности около 7 мкм.
Более того, возможен вариант применения камеры со специальной оптикой или смартфона с увеличивающей линзой перед объективом. Кроме этого, могут быть уменьшены размеры отображаемой области рассеяния 34, например, до формата от 20 x 20 мм до 30 x 30 мм.
Понятно, что изображения с камеры 36 пересылаются по беспроводной связи(например, WiFi), на мобильную платформу. В этом случае применима специальная SD-карта.
Применение смартфона в качестве видеорегистратора обеспечивает множество преимуществ: такие устройства очень гибки и достаточно мощны для программирования и построения графического интерфейса пользователя; в частности, потенциально применимы такие опции, как распознавание жестов, отображение клавиатуры и локализация(установление местонахождения искомого объекта). При этом пользователь, выполняющий функции оператора, координирующего перемещение рабочих элементов, может использовать то устройство, с которым он уже хорошо знаком. К этому можно добавить то, что смартфоны предлагают множество интерфейсов, например, для ведения баз данных технического сопровождения; в частности, обеспечиваются беспроводной интерфейс доступа к мобильным операционным платформам, использование наушников (с эхо- и шумоподавлением), гарнитуры GoogleGlass, вибропояса и т.д. При этом смартфон может быть использован по прямому назначению в промежутках времени, когда он не задействован в режиме мониторинга ориентации.
Один из вариантов реализации изобретения предусматривает наличие в области рассеяния 34 множества двухмерных оптических кодов, например QR-кода, как правило, нанесённого по всей области рассеяния в виде сеточного шаблона; такая кодировка на области рассеяния несёт в себе информацию о самой области рассеяния, об измерительном устройстве, на которое она нанесена, например, заводской номер измерительного устройства, размеры области рассеяния по осям X и Y (например, в мм), поправочные коэффициенты точности или погрешности принтера, напечатавшего данную область рассеяния (например, значения растяжения или сжатия в направлениях X и Y), количество кодов на данной области рассеяния, расположение каждого кода в сетке (номер строки и столбца), и расстояние каждого кода от опорной точки системы координат области рассеяния (например, в мкм). Индивидуальные коды могут быть расположены, например, касаясь один другого и покрывая всю область рассеяния (см., например, фиг. 5, где обозначены коды 60A, 60B, 60C, 60D). Количество и чёткость кодов должны быть оптимизированы, чтобы отражать разрешающую способность принтера и камеры. Наряду с QR-кодом, в принципе, могут использоваться другие патентованные графические коды.
Нанесение графических кодов на область рассеяния 34 имеет такие преимущества, как: отсутствие необходимости видеофиксации всей поверхности отражателя с запасом прочности, что упрощает задачу оператора. Коды могут быть реконструированы с целью генерации заданного изображения для обеспечения доступности оптимальных значений точек для линеаризации изображений области рассеивания (внутренних и внешних параметров). Коды на области рассеяния могут быть идентифицированы как таковые на основе особых маркеров. При определении точек падения может быть достигнуто наилучшее положение. Область рассеяния может быть скорректирована с учётом степени прецизионности принтера, с помощью которого напечатана область рассеяния.
Реферат
Группа изобретений относится к устройству и способу обнаружения отклонения заданного положения двух тел относительно друг друга. Устройство и способ, реализующий устройство, содержат первое измерительное устройство, размещаемое относительно первого тела, второе измерительное устройство, размещаемое относительно второго тела, и вычислительное устройство. Первое измерительное устройство включает средство генерации, по меньшей мере, одного светового пучка и область рассеяния света, падающего на область рассеяния, второе измерительное устройство включает отражатель светового пучка, обращённый к первому измерительному устройству, когда указанные измерительные устройства установлены на соответствующих телах, предназначенный для отражения светового пучка на область рассеяния. При этом второе измерительное устройство имеет видеокамеру, установленную съемно на отражателе и предназначенную для регистрации изображений области рассеивания. Кроме того, вычислительное устройство выполнено с возможностью определения, по меньшей мере, одной точки падения на область рассеяния светового пучка, отражённого отражателем, по видеоданным, полученным с камеры, и выявления по такой точке падения отклонения положения первого тела от заданного положения первого тела и отклонения положения второго тела от заданного положения второго тела. Технический результат – упрощение определения отклонения двух тел от заданного взаимного положения. 2 н. и 7 з.п. ф-лы, 5 ил.
Комментарии