Оптический обмер крышки - RU2754071C2
Код документа: RU2754071C2
Чертежи

Описание
Изобретение относится к устройству и к способу оптического обмера объектов с целью регистрации и/или контроля их параметров, в частности, обмера в качестве объекта крышки для резервуара. Эта крышка имеет различные параметры, существенные для процесса ее закрытия, которые необходимо контролировать или по меньшей мере регистрировать.
Устройство и способ согласно изобретению предпочтительно применяются для того, чтобы выборочно проверять крышки резервуаров для пищевых продуктов в процессе производства на предмет соблюдения заданных значений параметров в пределах допустимых отклонений. Под крышками могут подразумеваться крышки типа Twist-Off (крышки с выступами) или крышки типа Press-On-Twist-Off (крышки типа РТ), предпочтительно металлические.
Однако по существу использование устройства и способа согласно изобретению возможно также для оптического обмера других крышек или других мелких объектов, например, крышек из синтетического материала, шайб, пружинных колец, монет или заготовок для монет в местах чеканки монет.
При изготовлении металлических крышек стеклянных резервуаров для пищевых продуктов, таких, как крышки типа Twist-Off или крышки типа Press-On-Twist-Off, важную роль играет соблюдение заданных значений параметров в пределах допустимых отклонений согласно соответствующей заводской спецификации. Несоблюдение заданных значений параметров может приводить к тому, что крышка после ее установки запирает наполненный резервуар для пищевых продуктов неправильно, что может повлечь за собой бактериальное загрязнение или повреждение пищевого продукта в резервуаре.
Проверяемые заданные значения параметров в крышках типа Twist-Off - это один или несколько наружных диаметров закатки и внутренних диаметров закатки для закатанной нижней кромки юбки крышки, овальность, габаритная высота, глубина гладкой поверхности (гладкой поверхности крышки в виде панели) или кнопки (глубина кнопки/гладкой поверхности) на верхней стороне крышки, глубина канавки, окружающей кнопку или гладкую поверхность (глубина канавки), высота, ширина, угол наклона и внутренний диаметр выступа (высота выступа, широта выступа, угол наклона выступа и внутренний диаметр выступа) вдоль закатанной нижней кромки, а также толщина материала уплотнительной прокладки (толщина компаунда) вдоль внутренней окружности приподнятого утолщения уплотнения крышки.
Для крышек типа Press-On-Twist-Off проверяемые заданные значения параметра - это один или несколько наружных диаметров закатки и внутренних диаметров закатки, габаритная высота, глубина кнопки или глубина гладкой поверхности, глубина канавки, а также толщина компаунда в двух местах вдоль внутренней окружности приподнятого утолщения уплотнения и юбки крышки, наружный диаметр верхней части и наружный диаметр загиба.
В настоящее время соблюдение заданных значений параметров преимущественно контролируют путем изъятия отдельных крышек из технологического процесса и их измерения вручную при помощи калибров или других тактильных измерительных устройств для определения в каждом случае фактических значений параметров и сравнения их с соответствующими заданными значениями. Однако определение всех вышеуказанных параметров крышек типа Twist-Off и крышек типа Press-On-Twist-Off такими способами очень длительно и трудоемко, помимо прочего вследствие того, что для него приходится использовать различные измерительные инструменты, подводя их к измеряемым крышкам с нескольких сторон или в разных направлениях. Кроме того, результаты контроля нередко неточны и зависят от субъективных оценок контролирующего. Поэтому в целом контроль на предмет соблюдения должных размеров возможен только для очень незначительной процентной доли крышек из технологического процесса. Если в одной крышке из партии регистрируется несоблюдение заданного значения параметра, часто приходится удалять всю партию. Кроме того, часто невозможно регистрировать вручную небольшие отклонения от заданных значений параметра, что не позволяет своевременно принять контрмеры в процессе производства крышек. Документирование и хранение измеренных вручную фактических значений параметров крышек трудоемко, так что последующее расследование и определение причин проблем - например, проблем герметичности (после заполнения резервуаров) - в большинстве случаев невозможно.
DE 102008019435 А1 иллюстрирует способ бесконтактного измерения трехмерных конструктивных элементов сложной формы, согласно которому конструктивный элемент захватывают захватом робота и перемещают в области регистрации нескольких оптических датчиков, которые расположены неподвижно и которые фиксируют изображения конструктивного элемента или производят его съемку в различных направлениях, причем после этого изображения анализируют.
Исходя от этого, задача, лежащая в основе изобретения, состоит в создании такого устройства или способа, которые бы позволили автоматически контролировать соблюдение заданных значений параметров путем измерения соответствующих фактических значений параметров множества объектов с постоянной и высокой точностью, также и в тех случаях, когда требуются измерения фактических значений параметров на различных или противоположных сторонах или в различных или противоположных местах каждого из объектов.
Согласно изобретению для решения вышеназванной задачи объекты, в частности, крышки, автоматически измеряют оптическим способом, при этом заявленное устройство (пункт 1 формулы изобретения) включает в себя подвижный робот-манипулятор с несколькими степенями свободы, имеющий захват для приема измеряемого объекта, первый неподвижный оптический датчик для регистрации по меньшей мере одного первого параметра объекта, а также по меньшей мере нщн один неподвижный оптический датчик для регистрации по меньшей мере еще одного параметра объекта. Для регистрации первого параметра робот укладывает принятый захватом объект на укладочную поверхность в области регистрации первого датчика и перемещает принятый захватом объект для регистрации по меньшей мере еще одного параметра в пределах области регистрации по меньшей мере одного дополнительного оптического датчика.
Изобретение(-я) позволяет(-ют) изымать из технологического процесса по отдельности большое количество объектов, чтобы после обмера снова возвращать те объекты, для которых соблюдены требования по заданным значениям параметров, в технологический процесс. Те объекты, для которых они не соблюдается, передают на утилизацию.
В случае существенных отклонений от заданных значений параметра возможно воздействие на технологический процесс сразу, например, чтобы остановить его для устранения причины дефекта. Сокращается количество дефектных и, таким образом, удаляемых объектов.
Достигается сокращение занимаемой площади, и возможна установка устройства вблизи машин (штамповочных прессов, зажимов), служащих для производства объектов, в частности крышек, без ухудшения условий обмера объектов вследствие воздействий окружающей среды, несмотря на неблагоприятные окружающие условия, такие, как теплота и вибрации.
Устройство позволяет автоматически относить результаты обмера объекта к определенной партии объектов из технологического процесса, так что в случае последующей рекламации объекта возможно подтверждение его производства надлежащим образом.
Способ согласно изобретению (пункт 20) предусматривает, что объект принимают посредством захвата робота, перемещаемого с несколькими степенями свободы. Первый неподвижный оптический датчик регистрирует по меньшей мере один первый параметр объекта. Дополнительный неподвижный оптический датчик регистрирует по меньшей мере еще один параметр объекта. Для регистрации первого параметра принятый захватом объект укладывают на укладочной поверхности в области регистрации первого оптического датчика. Для регистрации по меньшей мере еще одного параметра объект перемещают в пределах области регистрации по меньшей мере одного дополнительного оптического датчика.
Манипулирование объектом посредством робота, снабженного захватом, позволяет принимать измеряемый объект, укладывать его в области регистрации первого оптического датчика на укладочной поверхности, снова снимать его с укладочной поверхности, перемещать его в область регистрации по меньшей мере одного дополнительного оптического датчика, перемещать его там вдоль заранее заданного пути перемещения, например, поворачивая его вокруг определенной оси, чтобы приводить его в одно или несколько желаемых положений по отношению к дополнительному оптическому датчику, и либо возвращать его в технологический процесс, либо удалять, в зависимости от результата обмера.
Кроме того, посредством укладывания объекта на укладочной поверхности с целью регистрации по меньшей мере одного первого параметра объекта при помощи первого оптического датчика возможно определение с высокой точностью базового параметра, который требуется для позднейшего нахождения других параметров. Тогда согласно следующему предпочтительному варианту осуществления изобретения этот базовый параметр может применяться для расчета других параметров, например, на основе результатов измерения, получаемых по меньшей мере одним дополнительным оптическим датчиком.
Расчет предпочтительно производят посредством компьютера устройства, который устанавливает связь системы координат укладочной поверхности и системы координат робота друг с другом. Компьютер предпочтительно содержит память и индикаторное устройство, так что возможно показание полученных значений параметров, их сравнение с заданными значениями параметров и запись, в сочетании с номером партии, в базу данных в памяти компьютера.
Если под укладочной поверхностью согласно предпочтительному варианту осуществления изобретения подразумевается заранее точно измеренная укладочная поверхность, координаты которой известны в системе координат, отличной от системы координат робота, и соотношение положения которой с системой координат робота также известно, то при новом приеме объекта с укладочной поверхности возможно позиционирование захвата робота с высокой точностью в желаемом положении по отношению к объекту, предпочтительно в таком относительном положении, в котором центральная ось захвата находится точно над центром поверхности ротационно-симметричного объекта, или, в случае круглой крышки, над ее центром. Это определенное соотношение между положением объекта и положением захвата позволяет, в свою очередь, перемещать объект для следующего обмера на точно определенное место в пределах области регистрации по меньшей мере одного дополнительного оптического датчика или вдоль точно определенного пути перемещения, для определения по меньшей мере еще одного параметра на желаемом месте на траектории лучей, относящихся к по меньшей мере одному дополнительному датчику.
Если под объектом подразумевается магнитный объект, имеющий плоскую поверхность, то захват предпочтительно включает в себя электромагнит, который включают для захвата объекта и отключают для сбрасывания объекта. Чтобы предотвращать залипание объекта вследствие остаточной намагниченности, целесообразно размещение электромагнита в корпусе из легкого сплава.
Под найденными параметрами предпочтительно подразумеваются размеры или габариты, которые в целесообразном случае измеряют непосредственно или рассчитывают на основе результатов измерения одного из датчиков, частично с применением уже найденных ранее параметров.
Согласно предпочтительному варианту осуществления изобретения под измеряемыми объектами подразумеваются крышки для резервуаров для пищевых продуктов, предпочтительно крышки типа Twist-Off или крышки типа Press-On-Twist-Off, причем в первом из указанных случаев по меньшей мере один первый параметр, полученный посредством первого оптического датчика, включает в себя наружный диаметр и, при необходимости, овальность крышки, а по меньшей мере еще один параметр, найденный посредством по меньшей мере одного дополнительного оптического датчика, включает в себя внутренний диаметр закатки, высоту, ширину, угол наклона и внутренний диаметр выступа вдоль нижней кромки и/или толщину уплотнительного материала (толщину компаунда) вдоль внутренней боковой поверхности крышки.
В последнем из упомянутых случаев по меньшей мере один первый параметр, полученный посредством первого оптического датчика, включает в себя наружный диаметр верхней части и/или наружный диаметр загиба, а также, при необходимости, овальность крышки, в то время как по меньшей мере еще один параметр, полученный посредством по меньшей мере одного дополнительного оптического датчика, включает в себя толщину уплотнительного материала (толщину компаунда) вдоль внутренней боковой поверхности, предпочтительно в двух различных местах юбки и утолщения уплотнения, и/или внутренний диаметр закатки крышки.
Кроме того, посредством устройства согласно изобретению и способа согласно изобретению возможно автоматическое отделение тех объектов, например, крышек, которые соответствуют заданным значениям параметров, от тех объектов, которые не соответствуют заданным значениям параметров. Это позволяет согласно следующему предпочтительному варианту осуществления изобретения возвращать первые из них непосредственно в технологический процесс, а последние устранять. Сравнение фактических значений параметров, регистрируемых при обмере объекта, с соответствующими заданными значениями параметров, предпочтительно происходит еще в течение того периода, в котором объект удерживается захватом робота, так что посредством соответствующего позиционирования робота возможно сбрасывание либо в первое транспортное устройство или спускной лоток для возврата в технологический процесс, либо во второе транспортное устройство или спускной лоток для удаления, в зависимости от результата сравнения.
Согласно еще одному предпочтительному варианту осуществления изобретения устройство наряду с неподвижным первым оптическим датчиком и по меньшей мере одним дополнительным неподвижным оптическим датчиком включает в себя также оптический датчик, помещенный на роботе или, соответственно, на захвате, и перемещаемый вместе с роботом, предпочтительно речь идет о лазерном триангуляционном датчике с лазером и детектором CCD/PSD, или с камерой, или же с фотодиодом, имеющим высокое пространственное разрешение.
Подвижный датчик служит, с одной стороны, для того, чтобы до приема объекта захватом робота приблизительно измерять высоту и положение объекта на подводящем спускном лотке со сходящимися ограничительными стенками. Тем самым должно устанавливаться, во-первых, идет ли речь об ожидаемом объекте, заданные значения параметров которого положены в основу обмера, или же к устройству ошибочно подводят другой объект с абсолютно другими параметрами. Во-вторых, измерение служит для того, чтобы при последующем приеме объекта приводить захват робота по меньшей мере приблизительно в желаемое положение по отношению к объекту, например, позиционируя его, для приема круглой крышки, центрально по отношению к крышке.
С другой стороны, подвижный датчик служит для того, чтобы с высокой точностью измерять высоту уложенного на укладочной поверхности объекта и находить продольный профиль верхней стороны объекта, противоположной укладочной поверхности, измеряя расстояние между лазером и точками попадания, в которых испускаемый лазером луч встречает препятствие, вдоль заданной траектории перемещения лазерного луча над верхней стороной объекта, а из известной высоты укладочной поверхности в координатной системе робота рассчитывают высоту таких точек попадания над укладочной поверхностью. Это дает возможность находить - в дополнение к уже упомянутым параметрам, которые находят посредством неподвижных оптических датчиков, - другие параметры, например, для крышек типа Twist-Off и крышек типа Press-On-Twist-Off габаритную высоту, глубину гладкой поверхности или кнопки (глубину кнопки/гладкой поверхности) в центре верхней стороны крышки и глубину канавки, окружающей кнопку или гладкую поверхность (глубину канавки).
Обмер этих параметров на укладочной поверхности предпочтителен, так как эти параметры относятся к верхней стороне крышки, которая после приема объекта роботом обращена к захвату и прилегает к поверхности прилегания захвата робота, в общем случае плоской, и которая поэтому уже недоступна для обмера.
Следующий предпочтительный вариант осуществления изобретения предусматривает, что укладочная поверхность прозрачна, что первый оптический датчик включает в себя источник света, расположенный с одной стороны от укладочной поверхности, телецентрическую оптику, расположенную между источником света и укладочной поверхностью, и устройство регистрации изображения, расположенное на противоположной стороне от укладочной поверхности, для регистрации по меньшей мере одного параметра теневого изображения, произведенного объектом. Посредством анализа теневого изображения, регистрируемого устройством генерирования изображений, возможно прежде всего нахождение с высокой точностью внешних габаритных размеров объекта, лежащего на укладочной поверхности, и тем самым для крышек типа Twist-Off внешнего диаметра закатки, который позднее используется компьютером для расчета других параметров на основе результатов измерения, фиксируемых по меньшей мере одним дополнительным оптическим датчиком.
По меньшей мере один дополнительный оптический датчик служит предпочтительно для нахождения параметров, относящихся к нижней, или внутренней стороне измеряемого объекта, обращенной к укладочной поверхности и противоположной захвату робота. Если под объектом подразумевается крышка типа Twist-Off или крышка типа Press-On-Twist-Off, то по меньшей мере один дополнительный оптический датчик в целесообразном случае включает в себя первый дополнительный датчик, который выполнен в виде лазерного триангуляционного датчика. Он предпочтительно включает в себя лазерный проектор и детектор с высоким промтранственным разрешением и при обмере крышек типа Twist-Off служит для нахождения толщины материала уплотнения (толщины компаунда) вдоль внутренней боковой поверхности крышки. Для обмера робот поворачивает крышку в пределах области регистрации датчика на 360° вокруг центральной оси захвата. Во время поворота измеряют методом лазерной триангуляции расстояние между лазерным проектором и точкой попадания лазерного луча, испускаемого во время поворота лазерного проектора, на определенном удалении от внешней боковой поверхности крышки, и исходя из этого находят толщину компаунда.
При обмере крышек типа Press-On-Twist-Off также находят толщину компаунда вдоль внутренней боковой поверхности измеряемой крышки, однако, в отличие от крышек типа Twist-Off, делают это в двух различных местах. Кроме того, при обмере этих крышек лазерный триангуляционный датчик служит также для нахождения внутреннего диаметра закатки.
В случаях, когда объект представляет собой крышку типа Twist-Off, по меньшей мере один дополнительный неподвижный датчик включает в себя второй дополнительный датчик, который предпочтительно включает в себя линейный лазер и камеру и служит для нахождения высоты и угла наклона выступов вдоль нижней кромки крышки. Для обмера удерживаемую роботом крышку типа Twist-Off поворачивают вокруг центральной оси захвата, в это время на внутреннюю боковую поверхность крышки направляют в плоскости, наклонной относительно центральной оси, испускаемую линейным лазером лазерную линию, и последняя отражается оттуда к камере, которая принимает отраженное изображение от линейного лазера. При этом плоскость лазерной линии, испускаемой линейным лазером, предпочтительно образует с плоскостью лазерной линии, отраженной к камере, острый угол, предпочтительно составляющий примерно от 35° до 40°. Второй дополнительный датчик позволяет получать посредством камеры серию изображений мест, находящихся вдоль боковой поверхности крышки, из которых следует высота и угол наклона выступа (уклон выступа).
Для обмера крышек типа Twist-Off по меньшей мере один дополнительный неподвижный датчик предпочтительно включает в себя еще один, третий дополнительный датчик, который предпочтительно включает в себя источник света, камеру и устройство обработки изображений. Целесообразно выполнение источника света в виде точечного источника, который расположен на отогнутом конце удлиненного держателя и направлен к камере, так что во время поворота крышки вокруг центральной оси захвата камера позволяет генерировать в направлении оси крышки теневое изображение выступов на нижней кромке крышки. После этого, с использованием ранее найденного внешнего диаметра закатки, возможно нахождение из такого теневого изображения ширины выступа (протяженности выступа), внутреннего диаметра крышки в области выступа (внутреннего диаметра выступа) и внутреннего диаметра закатки.
При обмере крышек типа Press-On-Twist-Off предпочтительно находят при помощи четвертого дополнительного датчика наружный диаметр верхней части и наружный диаметр загиба, генерируя теневые изображения во время поворота крышки вокруг центральной оси захвата и анализируя их. Для этой цели четвертый дополнительный датчик также включает в себя источник света, камеру и устройство обработки изображений.
Чтобы осуществить возможность установки устройства согласно изобретению вблизи места проведения технологического процесса, например, процесса формования для изготовления металлических крышек типа Twist-Off или типа Press-On-Twist-Off, без отрицательного влияния на измерения со стороны неблагоприятных окружающих условий, таких, как теплота и вибрации, робот, а также все датчики предпочтительно размещены внутри корпуса с кондиционированным воздухом, который виброустойчиво опирается на активные амортизаторы. Измеряемые крышки из технологического процесса по отдельности вводят в корпус, там измеряют и после этого, в зависимости от результата измерений, либо возвращают в технологический процесс, если все измеренные фактические значения параметров соответствуют заданным значениям параметров, либо удаляют, если одно или несколько измеренных фактических значений параметров не соответствуют заданным для этих параметров значениям.
В последнем случае возможна остановка технологического процесса, прежде чем будет изготовлено большое количество дефектных крышек.
Ниже изобретение более подробно разъясняется и дополняется на основе вариантов осуществления, представленных на чертеже.
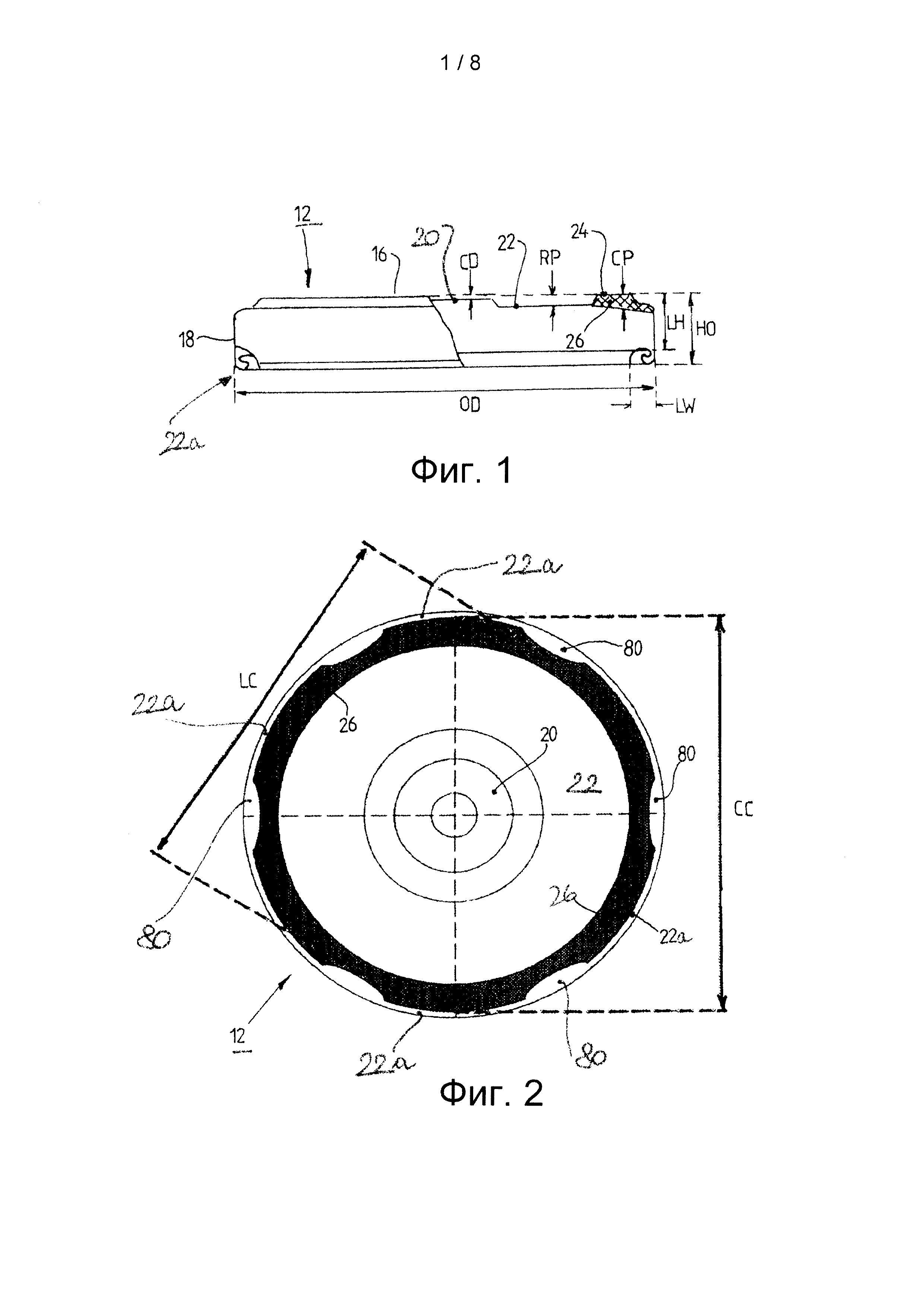
На ФИГ. 1 показан вид сбоку с частичным разрезом обмериваемой крышки типа Twist-Off с частью получаемых при обмере фактических значений параметров, или результатов измерения;
на ФИГ. 2 показан вид нижней стороны крышки с остальными получаемыми фактическими значениями параметров;
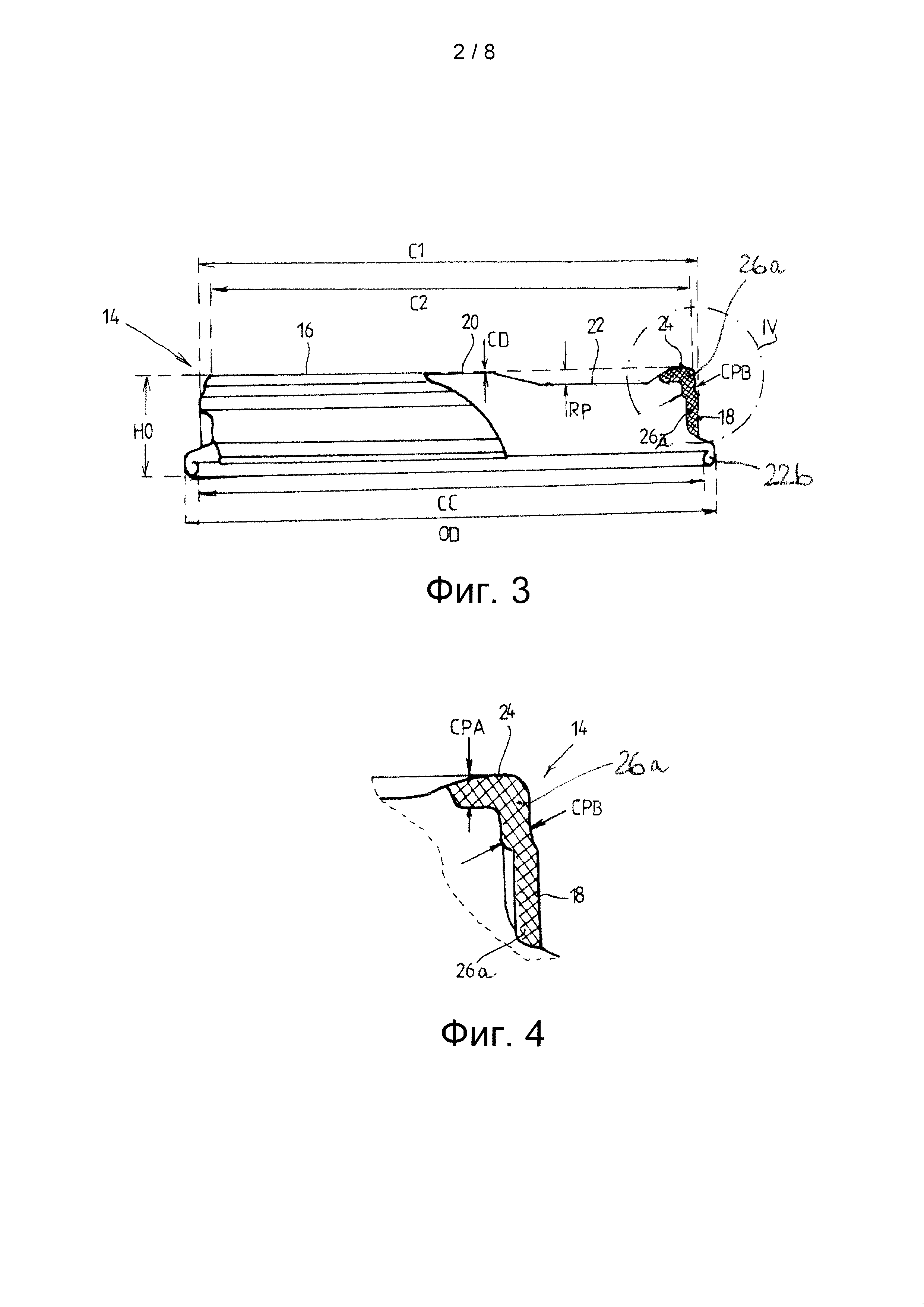
на ФИГ. 3 показан вид сбоку с частичным разрезом обмериваемой крышки типа Press-On-Twist-Off с получаемыми при обмере фактическими значениями измерительных параметров;
на ФИГ. 4 показан увеличенный вид фрагмента IV с ФИГ. 3;
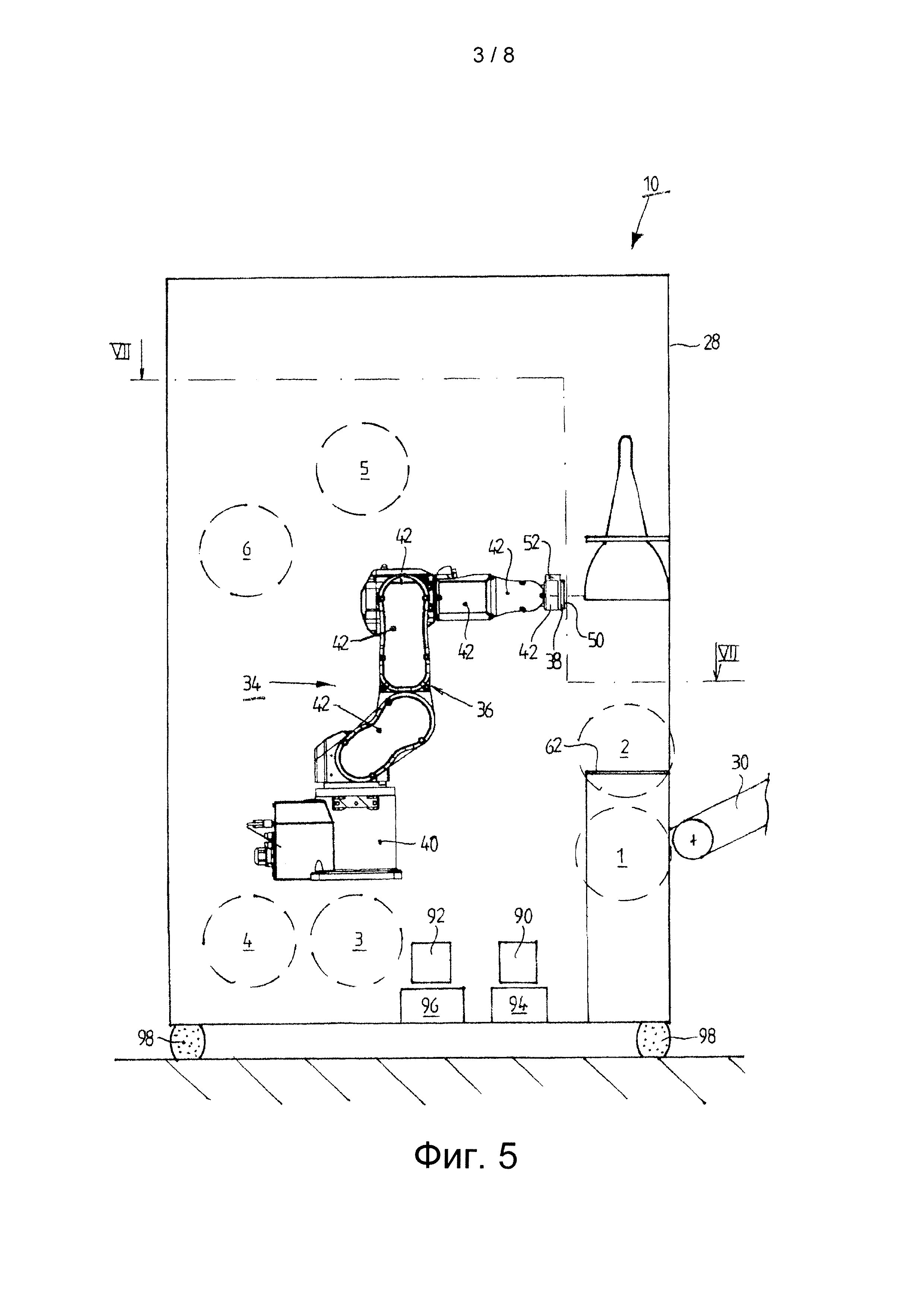
на ФИГ. 5 показан упрощенный вид сбоку устройства согласно изобретению;
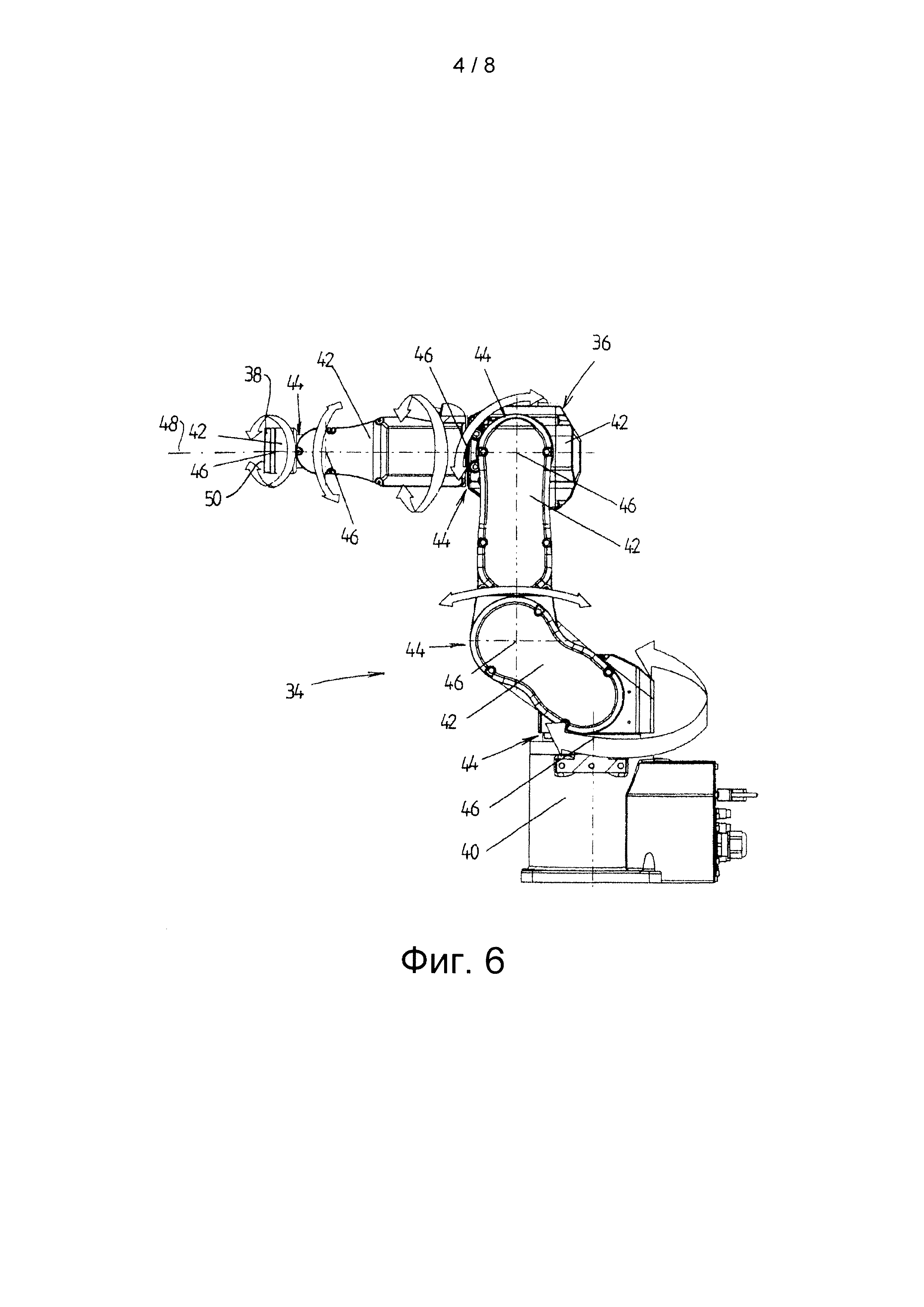
на ФИГ. 6 показан увеличенный вид сбоку робота устройства;
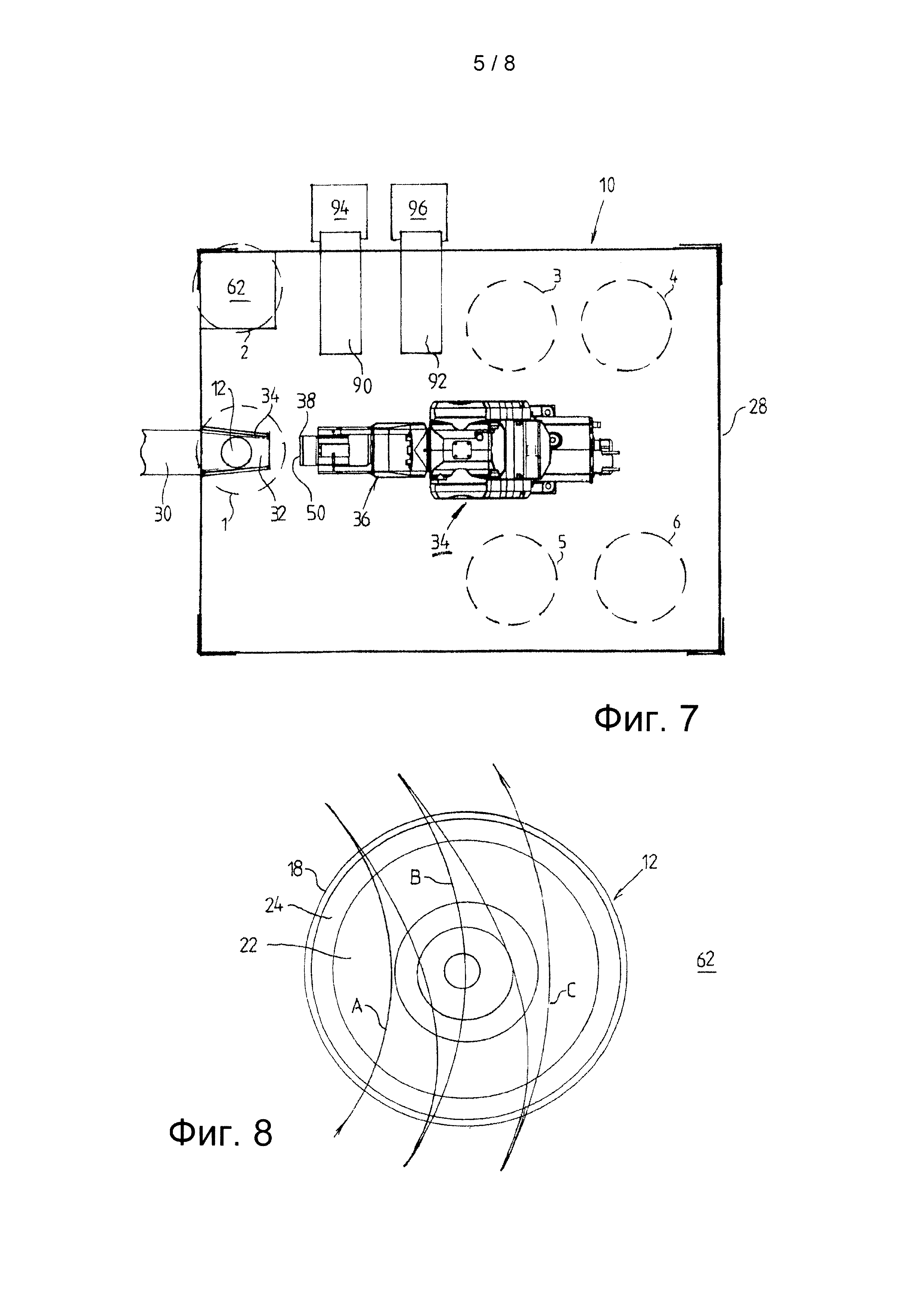
на ФИГ. 7 показан упрощенный вид разреза по линии VII-VII с ФИГ. 5;
на ФИГ. 8 показан вид верхней стороны укладочной поверхности первого неподвижного датчика и уложенной на укладочной поверхности крышки при обмере посредством подвижного лазерного триангуляционного датчика, переносимого роботом;
на ФИГ. 9 показан увеличенный вид сбоку укладочной поверхности, крышки, а также элементов телецентрической оптики первого неподвижного датчика;
на ФИГ. 10 схематично показан принцип действия подвижного лазерного триангуляционного датчика, переносимого роботом;
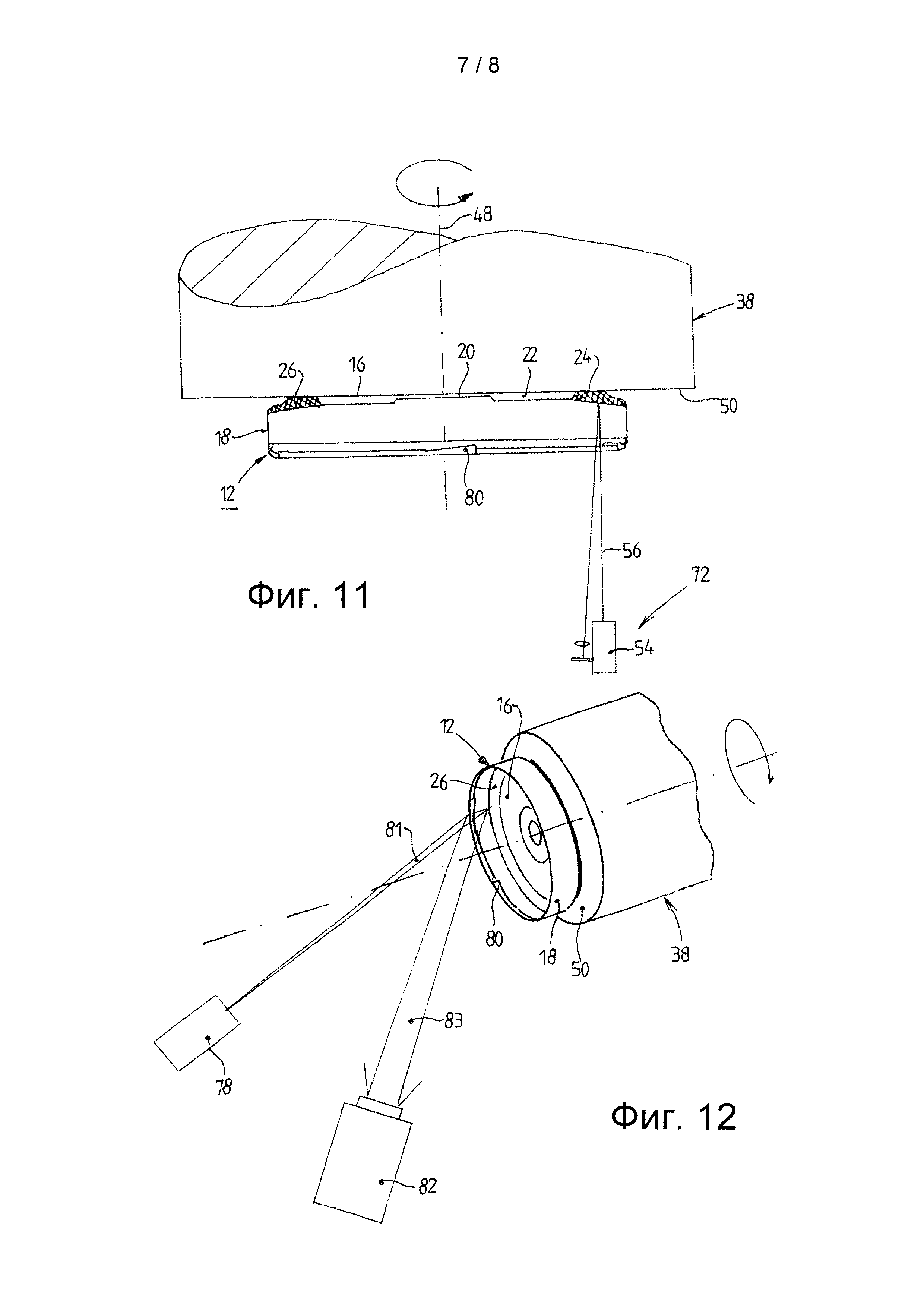
на ФИГ. 11 показан схематичный вид первого дополнительного оптического датчика при обмере крышки, перемещаемой роботом в области регистрации датчика;
на ФИГ. 12 показан схематичный вид второго дополнительного датчика при обмере крышки, перемещаемой роботом в области регистрации этого датчика;
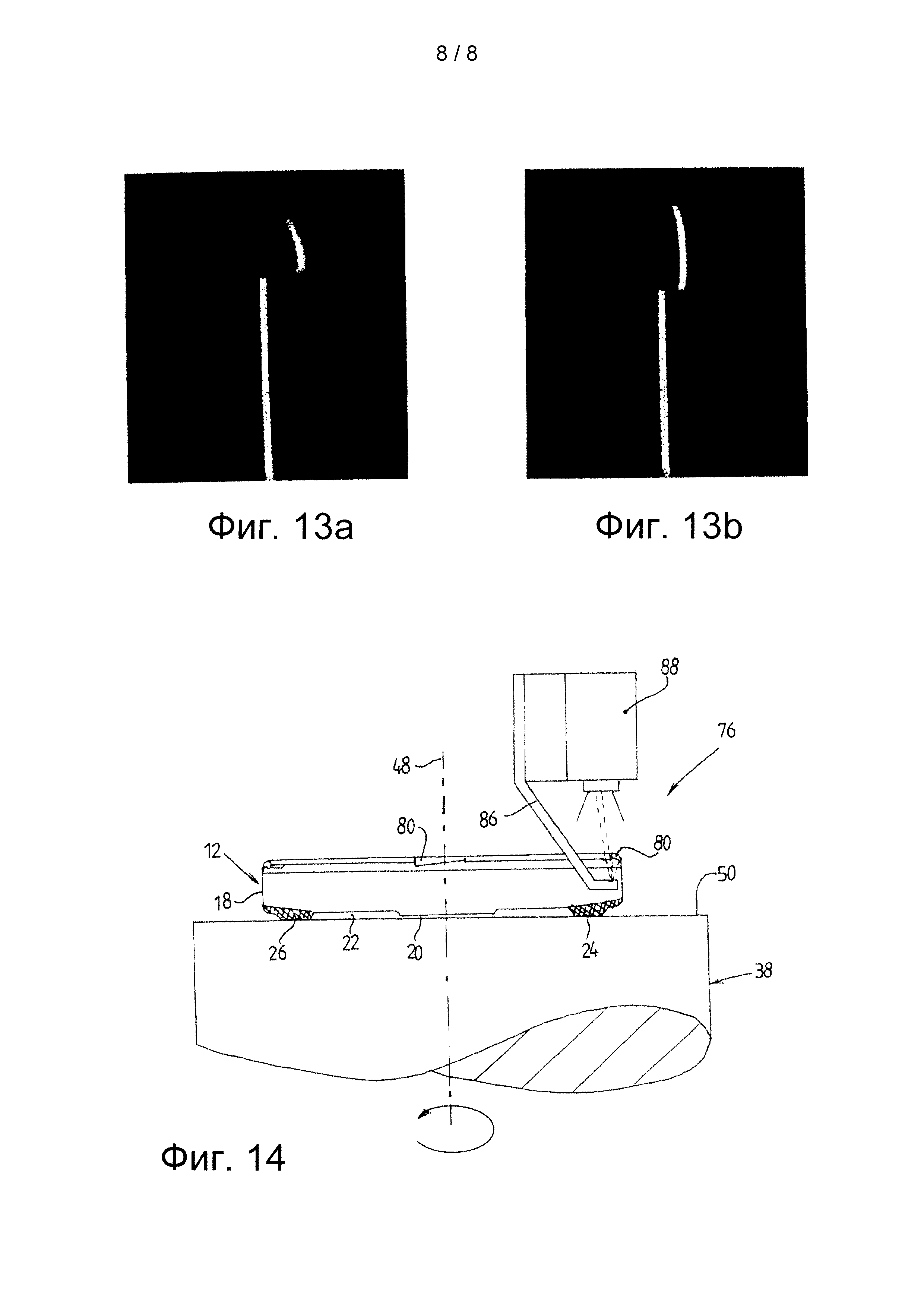
на ФИГ. 13а и 13b показаны два изображения, полученных вторым дополнительным датчиком;
на ФИГ. 14 показан схематичный вид третьего дополнительного датчика при обмере крышки, перемещаемой роботом в области регистрации этого датчика.
Устройство 10, представленное в упрощенном виде на ФИГ. 5 и 6, служит для оптического обмера крышек из ферромагнитного материала, в частности, для обмера металлической крышки 12 типа Twist-Off, представленной на ФИГ. 1 и 2, или металлической крышки 14 типа Press-On-Twist-Off, представленной на ФИГ. 3 и 4, которые обе служат для закрытия резервуаров, например стеклянных, для продуктов питания (не показаны).
Устройство 10 устанавливают вблизи технологической установки или технологической линии, в которой производятся крышки. Для их изготовления круглые заготовки из пластин штампуют и преобразуют в форму крышки, которая может иметь несколько выступов 80, или в которой на сформированную в ней юбку наносят компаунд в качестве средства образования резьбы (РТ-затвор). Резервуары имеют в верхней области края резьбу или ступенчатые сегменты резьбы для закрытия.
По существу возможно использование устройства 10 также для оптического обмера других объектов, предпочтительно плоских объектов в форме дисков или колец, таких как отчеканенные монеты, шайбы, пружинные кольца или тарельчатые пружины.
Крышка 12 типа Twist-Off, представленная на ФИГ. 1 и 2, состоит из тонкого листа луженого ферромагнитного материала и содержит гладкую поверхность 16, в общем случае дисковидную, и отходящую вниз от гладкой поверхности 16 юбку 18 с закатанной внутрь нижней кромкой 22а. В центре гладкой поверхности 16 находится кнопка 20, которая в вакуумных резервуарах несколько втягивается вниз и которая является индикатором герметичности. Кнопка 20 окружена углублением 22 и кольцеобразной выпуклостью 24. На внутренней, или нижней стороне выпуклости 24 в нее вложен или в ней сформирован эластичный уплотнительный материал (компаунд) 26.
На нижней кромке юбки сформированы расположенные на расстоянии друг от друга выступы 80. В канавку 24 вложено проходящее по окружности уплотнительное кольцо 26, которое при закрытии наполненной емкости, например, с пищевыми продуктами, уплотняет ее на верхней кромке.
При обмере крышки 12 находят оптическим методом представленные на ФИГ. 1 и 2 параметры - наружный диаметр OD закатки, внутренний диаметр СС закатки, габаритную высоту Н0, глубину RP канавки, глубину CD кнопки и гладкой поверхности, толщину CP компаунда, высоту LH выступа, ширину LW выступа, уклон LS выступа и внутренний диаметр LC выступа.
Представленная на ФИГ. 3 и 4 крышка 14 типа Press-On-Twist-Off также состоит из тонкого листа луженого ферромагнитного материала и содержит гладкую поверхность 16, в общем случае дисковидную, и отходящую вниз от гладкой поверхности 16 юбку 18 с закатанной внутрь нижней кромкой 22b, которые, однако, имеют другую форму, несколько отличающуюся от формы в крышке 12. В центре гладкой поверхности 16 находится кнопка 20, которая окружена углублением 22 и кольцеобразной выпуклостью 24. На нижней или внутренней стороне выпуклости 24 и на внутренней стороне верхнего участка юбки 18 сформирован эластичный уплотнительный материал (компаунд) 26а.
При обмере этой крышки 14 находят также оптическим методом представленные на ФИГ. 3 и 4 следующие параметры - наружный диаметр OD закатки, внутренний диаметр СС закатки, габаритную высоту Н0, глубину RP канавки, глубину CD кнопки и гладкой поверхности, наружный диаметр С1 верхней части, наружный диаметр С2 загиба, а также значения CPA и СРВ толщины компаунда.
Затем вышеуказанные фактические значения параметров сравнивают в компьютере (не показан) устройства 10 с соответствующими записанными предварительно заданными значениями параметров тех же крышек 12, 14. Фактические значения параметров и заданные значения параметров показывают на устройстве отображения (не показано) устройства 10. Если возможные отклонения находятся в пределах заданных допустимых отклонений, крышки 12, 14 возвращают в технологический процесс. Однако если отклонения систематически лежат вне заданных пределов допуска, крышки 12, 14 удаляют. В этом случае прерывают также сам технологический процесс, чтобы найти и устранить причину отклонений.
Как лучше всего показано на ФИГ. 5 и 6, устройство 10 содержит замкнутый корпус 28 с кондиционированным воздухом, в котором производят обмер и в который вводят крышки 12, 14 посредством подводящего транспортера 30 и подводящего спускного лотка 32. В корпусе 28 крышки 12, 14 центрируются по отношению к вертикальной центральной плоскости подводящего спускного лотка 32 посредством сходящихся ограничительных стенок 34 подводящего спускного лотка.
Внутри корпуса 28 находится робот 34 с манипулятором 36, на свободном конце которого помещен захват 38. Посредством захвата 38 крышку 12, 14 снимают с подводящего спускного лотка 32 в первом месте 1 измерения и перемещают внутри корпуса 28 в области перемещения манипулятора 36 к различным другим местам 2, 3, 4, 5 и 6 измерения, в каждом из которых находят разные фактические значения параметров или определяют результаты измерения, необходимые для нахождения фактических значений параметров. Отдельные места 1, 2, 3, 4, 5 и 6 измерения схематично представлены на ФИГ. 5 и 6 в виде кругов, выполненных пунктирными линиями.
Как лучше всего показано на ФИГ. 5 и 7, робот 34 содержит смонтированное в корпусе 28 основание 40, на которое опирается манипулятор 36, имеющий шесть степеней свободы и в общей сложности шесть звеньев 42. Между основанием 40 и первым звеном 42, а также между соседними звеньями 42 манипулятора 36 расположены приводимые в движение управляемые шарнирные соединения 44, посредством каждого из которых возможен поворот звена, обращенного к свободному концу манипулятора 36, относительно звена, обращенного к основанию 40, вокруг оси 46 вращения шарнирного соединения 44. Захват 36, смонтированный на конце последнего звена 42, выполнен с возможностью поворота в шарнирном соединении 44 между последним и предпоследним звеньями 42 вокруг центральной оси 48 последнего звена 42. Звенья 42 выполнены с возможностью управляемого перемещения в системе координат робота 34, чтобы перемещать захват 38 в пределах зоны досягаемости манипулятора 36 на желаемое место и направлять его в желаемую сторону.
Захват 38 включает в себя размещенный в корпусе из легкого сплава электромагнит (не виден), который смонтирован на свободном конце манипулятора 36 в виде продолжения последнего звена 42. Корпус в общем случае содержит плоскую поверхность 50 прилегания для плоской верхней стороны кольцеобразной выпуклости 24 крышки 12, 14. Для принятия крышки 12, 14 поверхность 50 прилегания приближают к крышке 12, 14 и затем включают электромагнит, чтобы притянуть крышку 12, 14 к поверхности 50 прилегания и неподвижно закрепить относительно последней в положении прилегания. Поверхность прилегания предпочтительно имеет некоторую шероховатость или определенную структуру поверхности, чтобы предотвращать прилипание крышек после отключения электромагнита.
Наряду с захватом 38 на последнем звене 42 манипулятора 36 помещен лазерный триангуляционный датчик 52 (ФИГ. 5), который перемещается вместе с последним звеном 42 манипулятора 36. Как показано на ФИГ. 10, датчик 52 включает в себя лазерный проектор 54, который испускает лазерный луч 56, а также объектив 58 и детектор 60 типа CCD/PSD. Для измерения расстояния объекта, например, измеряемой крышки 12, от лазерного проектора 54 лазерный луч 56 фокусируют на объекте 12 и наблюдают за точкой попадания посредством детектора 60 типа CCD/PSD. Если расстояние от лазерного проектора 54 до объекта 12 изменяется, то изменяется и угол, под которым лазерный луч 56 отражается от точки попадания к объективу 58 и детектору 60 типа CCD/PSD, и вместе с тем изменяется также положение изображения точки попадания на детекторе 60 типа CCD/PSD за объективом 58, как показано на ФИГ. 10 пунктирными линиями. На основе изменения позиции или, после калибровки, на основе положения точки попадания на детекторе 60 типа CCD/PSD возможен при помощи тригонометрических функций расчет расстояния между лазерным проектором 54 и объектом 12 или, соответственно, точкой попадания лазерного луча 56 на объект 12. Вместо детектора 60 типа CCD/PSD датчик 52 может содержать также камеру или фотодиод с высоким пространственным разрешением.
При помощи лазерного триангуляционного датчика 52 крышку 12, введенную в корпус 28 устройства 10, выровняв ее по центру на спускном лотке 32, измеряют в грубом приближении в месте 1 измерения, причем находят приблизительные значения параметров "высота" и "диаметр". Вследствие этого должна исключаться вероятность того, что обмер крышки 12 будет произведен с другими параметрами, отличающимися от заданных значений параметров. Параметры, найденные в месте 1 измерения, впоследствии служат для позиционирования захвата 38 перед приемом крышки 12 приблизительно над ее центром, чтобы центральная ось крышки 12 примерно совпадала с центральной осью 48 захвата 38.
После грубого обмера крышку 12 поднимают захватом 38 и транспортируют к месту 2 измерения, где ее укладывают на плоской горизонтальной укладочной поверхности 62 из стекла. Укладочной поверхность 62 точно измерена по отношению к координатной системе робота 34 во всех трех пространственных направлениях, так что для робота 34 имеется возможность согласовать общую нулевую точку системы координат. Благодаря этому возможно установление точного соотношения координат между поверхностью 50 прилегания захвата 38 и укладочной поверхностью 62 во всех трех пространственных направлениях.
В месте 2 измерения находится первый неподвижный оптический датчик 64, который в сочетании с компьютером находит внешний диаметр OD закатки и овальность крышки 12. Как лучше всего представлено на ФИГ. 9, датчик 64 включает в себя расположенный выше источник 66 света для укладочной поверхности 62 и расположенные между источником 66 света и телецентрической оптики 68 для укладочной поверхности 62 (показана только частично), посредством которой свет от источника 66 света направляется параллельным пучком и перпендикулярно укладочной поверхности 62. Ниже укладочной поверхности 62 находится устройство регистрации изображения 70 для получения теневого изображения крышки 12. Теневое изображение анализируют посредством компьютера, причем для нахождения внешнего диаметра OD закатки рассчитывают средний диаметр круглого теневого изображения, а для нахождения овальности находят максимальные отклонения рассчитанных диаметров от среднего диаметра.
Затем при помощи лазерного триангуляционного датчика 52 находят габаритную высоту Н0, глубину RP канавки и глубину CD кнопки и гладкой поверхности крышки 12, уложенной на укладочную поверхность 62, перемещая, посредством соответствующего управления манипулятором 36, датчик 52 над крышкой 12 в горизонтальной плоскости, параллельной укладочной поверхности 62, вдоль концентрических траекторий А, В, С, как схематично представлено на ФИГ. 8, и измеряя расстояние между лазерным проектором 54 и верхней стороной крышки 12 во множестве точек измерения. Поскольку высота укладочной поверхности 62 в координатной системе робота 34 известна, возможен расчет на основе измеренного расстояния и размеров робота 34 габаритной высоты Н0, а из нее в свою очередь расчет глубины RP канавки и глубины кнопки или глубины CD гладкой поверхности.
Затем крышку 12 снова поднимают с укладочной поверхности 62 посредством захвата 38, предварительно поместив центральную ось 48 захвата 38 над центром крышки 12 с точностью до 30 микрон, так что при последующем обмере принятая захватом 38 крышка 12 поворачивается точно вокруг своего центра.
Затем крышку 12 перемещают роботом 34 к месту 3 измерения, где посредством первого дополнительного оптического датчика 72 (ФИГ. 11) находят толщину CP компаунда как один из параметров на противоположной захвату 38 нижней поверхности, или внутренней стороне крышки 12. Под датчиком 72 подразумевается неподвижный лазерный триангуляционный датчик, конструкция и принцип действия которого соответствуют данным описанного выше датчика 52. Однако испускаемый лазерным проектором 54 лазерный луч 56 находится в синей области длин волны, так как красный свет в значительной степени поглощается уплотнительным материалом 26.
При обмере крышек 12 типа Twist-Off лазерный луч 56 направляют снизу, с постоянного расстояния 5,6 мм от внешней боковой поверхности юбки 18, на уплотнительный материал 26, в то же время поворачивая крышку 12 вокруг центральной оси 48 захвата 38 и тем самым вокруг ее центра, как показано на ФИГ. 11. Поскольку компьютеру устройства 10 известны как положение лазерного проектора 54, так и положение захвата 38 в координатной системе робота 34, это позволяет посредством компьютера с высокой точностью находить - на основе измеренных во время поворота расстояний между лазерным проектором 54 и точкой попадания лазерного луча 56 на уплотнительный материал 26, с использованием ранее найденной высоты Н0 - толщину CP компаунда вдоль внутренней боковой поверхности кольцеобразной выпуклости 24.
При обмере крышек 14 типа Press-On-Twist-Off лазерный луч 56 направляют на уплотнительный материал 24 снизу и под углом изнутри в двух местах, чтобы соответствующим образом находить толщину CPA и СРВ компаунда в этих местах, как лучше всего представлено на ФИГ. 4, в то же время крышку 12 поворачивают вокруг центральной оси 48 захвата 38. Кроме того, при обмере крышек 14 типа Press-On-Twist-Off датчик 72 служит также для нахождения внутреннего диаметра СС закатки. Для этого лазерным проектором 54 направляют лазерный луч 56 под углом изнутри на нижнюю кромку юбки 18 и во время поворота крышки 14 вокруг центральной оси 48 захвата 38 измеряют расстояния между лазерным проектором 54 и точкой попадания лазерного луча 56 на нижнюю кромку. После этого на основе результатов измерения и известных данных о положении лазерного проектора 54 и захвата 38 в координатной системе робота 34 находят посредством компьютера внутренний диаметр СС закатки.
Если речь идет о крышке 12 типа Twist-Off, ее затем перемещают посредством робота 34 сначала к месту 4 измерения и после этого к месту 5 измерения, в то время как если речь идет о крышке 14 типа Press-On-Twist-Off, ее перемещают к месту 6 измерения. В каждом из всех трех мест 4, 5, 6 измерения находится дополнительный неподвижный оптический датчик, из них на чертеже представлены только датчики 74, 76 в местах 4 и 5 измерения. Во всех трех местах 4, 5, 6 измерения каждый из датчиков 74, 76 включает в себя источник света и узел регистрации изображения, посредством которого во время поворота крышки 12, 14 вокруг центральной оси 48 захвата 38 последовательно принимают теневые изображения частей крышки 12, 14, расположенных вдоль ее боковой поверхности, и после этого анализируют их компьютером устройства 10.
В месте 4 измерения находят высоту LH выступа и уклон LS выступа 80 на нижней кромке юбки 18 крышек 12 типа Twist-Off. У второго дополнительного датчика 74, расположенного в месте 4 измерения, источник света представляет собой лазерный проектор 78, испускающий веер 81 лазерных лучей, точки попадания которых на плоской поверхности образуют прямую линию. Лазерный проектор 78 при этом направлен таким образом, что веерообразное лазерное излучение попадает на внутреннюю боковую поверхность юбки 18 и на выступы 80 в виде вертикальной линии, перпендикулярной плоскости гладкой поверхности 16 крышки 12, и отражается оттуда к камере 82, которая служит в качестве узла регистрации изображения. Плоскость веера 81 лазерных лучей, испускаемых лазерным проектором 78, и плоскость веера 83 лазерных лучей, отраженных от юбки 18 и регистрируемых камерой 82, образуют друг с другом острый угол от 35° до 40°, как показано на ФИГ. 12. Во время обмера захват 38 и удерживаемая захватом 38 крышка 12 поворачиваются вокруг центральной оси 48, которая, в отличие от показанного на ФИГ. 12, направлена перпендикулярно плоскости веера 81 лазерных лучей, испускаемых лазерным проектором 78.
Во время поворота крышки 12 вокруг центральной оси 48 захвата 38 камера 82 воспринимает свет лазера, отраженный от внутренней боковой поверхности юбки 18 к камере 82, и производит из этого отдельные изображения, два из которых представлены на ФИГ. 13а и 13b. Компьютеризированное совмещение или, соответственно, наложение изображений, последовательно снятых камерой 82 в направлении окружности крышки 12, и анализ полученной при этом общей картины с учетом ранее найденной высоты Н0 позволяют с высокой точностью определять высоту LH выступа и уклон LS выступа. Как видно из ФИГ. 13а и 13b, нахождение высоты LH выступа возможно, например, на основе измеренной в области выступов 80 высоты юбки 18, которая на каждой из ФИГ. 13а и 13b изображена в виде белой прямой. После этого возможно определение уклона LS выступа для каждого выступа 80 в результате расчета на основе измеренных значений высоты LH выступа в начале и в конце соответствующего выступа 80.
В месте 5 измерения крышки 12 типа Twist-Off с обращенными вверх юбками 18 поворачивают вокруг вертикально направленной центральной оси 48 захвата, чтобы находить ширину LW выступа, внутренний диаметр LC выступа и внутренний диаметр СС закатки, как представлено на ФИГ. 14. Для третьего дополнительного датчика 76, установленного неподвижно в корпусе 28 над крышкой 12, источником света является точечный источник 84 света, который расположен на отогнутом нижнем конце удлиненного держателя 86 и направлен вверх к камере 88, которая служит в качестве узла регистрации изображения. При обмере крышки 12 точечный источник 84 света помещают ниже закатанной кромки юбки 18, прежде чем последовательно снять посредством камеры 88 теневые изображения закатанной кромки вокруг боковой поверхности крышки 12 и затем посредством компьютера устройства 10 совместить их друг с другом или, соответственно, наложить их друг на друга в направлении окружности крышки 12. Затем на полученное при этом теневое изображение нижней поверхности крышки 12 накладывают теневое изображение, полученное в месте 2 измерения, причем оба теневых изображения центрируют по отношению друг к другу. На основе этого наложенного теневого изображения путем его анализа посредством надлежащего программного обеспечения при помощи компьютера устройства 10 возможно расчетное нахождение с высокой точностью ширины LW выступа, внутреннего диаметра LC выступа и внутреннего диаметра СС закатки.
В месте 6 измерения находят наружный диаметр С1 верхней части и наружный диаметр С2 загиба для крышек 14 типа Press-On-Twist-Off. Для этого четвертый дополнительный датчик (не показан), расположенный в месте 5 измерения, также включает в себя источник света и камеру или блок обработки изображений, который принимает боковое теневое изображение крышки 14. Затем это теневое изображение оценивают посредством компьютера устройства 10, чтобы путем расчетного анализа определить наружный диаметр С1 верхней части и наружный диаметр С2 загиба.
Фактические значения параметров, такие, как OD, OV, LH, RP, CD, CP, CPA, СРВ, СС, LH, LW, LS, LC, C1 и/или C2, полученные при обмере крышки 12, 14, посредством компьютера (не показан) устройства 10 сравнивают с соответствующими заданными значениями параметров, записанными в память компьютера перед обмером. Результат сравнения выводят на индикатор компьютера. Если все возможные отклонения между фактическими значениями параметров и заданными значениями параметров находятся в пределах ранее установленных допусков, крышку 12, 14 возвращают в технологический процесс. Для этого захват 38 робота 34 перемещают в положение над первым отводящим спускным лотком 90 и затем электромагнит отключают, чтобы сбросить крышку 12, 14 в первый отводящий спускной лоток 90.
Если же, напротив, возможное расхождение между фактическим значением одного из параметров и соответствующим заданным значением параметра находятся вне пределов ранее установленного для него допуска, то крышку 12, 14 удаляют. Для этого захват 38 перемещают в положение над вторым отводящим спускным лотком 92 и затем отключают электромагнит, чтобы сбросить крышку 12, 14 во второй отводящий спускной лоток 92.
Оба отводящих спускных лотка 90, 92 ведут из корпуса 28 наружу к одному из сборных резервуаров 94, 96 или к транспортерам, откуда ведут пути к технологической линии либо к месту утилизации.
Чтобы минимизировать пути транспортировки крышек 12, 14 из технологического процесса к устройству 10 и обратно, предпочтительно позиционирование устройства 10 вблизи технологического оборудования. Чтобы предотвратить появление ошибочных результатов измерения, вызванное имеющимися там окружающими условиями, в частности, вибрациями и высокими температурами, устройство 10 включает в себя кондиционер (не показан), который кондиционирует воздух внутри корпуса и обеспечивает там постоянную температуру и влажность воздуха. Как лучше всего представлено на ФИГ. 5, корпус 28, кроме того, виброустойчиво опирается на активные амортизаторы 98.
Реферат
Изобретение относится к устройству и способу оптического обмера крышки с целью регистрации и/или контроля ее параметров. Крышка (12, 14) имеет различные параметры, существенные для процесса ее закрытия, которые необходимо контролировать или по меньшей мере регистрировать. Устройство содержит робота (34), первый неподвижный оптический датчик (64), по меньшей мере еще один неподвижный оптический датчик (72, 74, 76). Робот (34) с подвижным захватом (38) принимает крышку (12, 14). Первый неподвижный оптический датчик (64) предусмотрен для определения по меньшей мере одного первого параметра (OD, OV) крышки (12,14). Неподвижный оптический датчик (72, 74, 76) позволяет находить еще один параметр (CP, CPA, CPB, CC, LH, LW, LS, LC, C1, C2) крышки (12, 14). Робот (34) укладывает принятую захватом (38) крышку на укладочной поверхности (62) в области регистрации первого оптического датчика (64). Находят первый параметр (OD), и робот (34) перемещает принятую захватом (38) крышку в пределах еще одной области регистрации дополнительного оптического датчика (72, 74, 76) для нахождения указанного еще одного параметра (CP, CPA, CPB, CC, LH, LW, LS, LC, C1, C2). Изобретение позволит проверять крышки резервуаров для пищевых продуктов в процессе производства на предмет соблюдения заданных значений параметров в пределах допустимых отклонений. 2 н. и 19 з.п. ф-лы, 14 ил.
Комментарии