Устройство для измерения параметров пересечений - RU2445571C1
Код документа: RU2445571C1
Чертежи








Описание
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к устройству для измерения параметров пересечений и, более конкретно, к устройству, выполненному с возможностью определения положения проводов путем обработки изображений. Более конкретно, данное изобретение относится к устройству для измерения параметров пересечений, выполненному с возможностью определения положения и отклонения пересечения.
УРОВЕНЬ ТЕХНИКИ
К оборудованию электрических железных дорог относится контактный провод. На участке, на котором пересекаются рельсы, необходимо обеспечить пересечение контактных проводов. Линии, отличные от главной линии и пересекающие друг друга, называют пересечением. Контактные провода, установленные над главной линией и пересечением на станционных путях, пересекаются друг с другом в точке разветвления рельса. Две контактные подвески соединены механически с помощью поперечного хомута или соединены электрически с помощью соединителя с образованием специальной подводной конструкции. Необходимо, чтобы контактный провод (главная линия и пересечение) были проложены (установлены) в пределах нормативной или установленной высоты от поверхности рельса и в пределах нормативного или установленного отклонения влево и вправо от центра пути.
Однако, когда разница высот обоих контактных проводов, пересекающих друг друга, изменяется из-за температурного изменения контактного провода, приподнимания (направленной вверх силы) пантографа и т.п., контактный провод перемещается близко к устройству для измерения нагрузки или устройству для измерения транспортного средства относительно пантографа. Может произойти повреждение контактного провода и пантографа (далее называемое захлестыванием). Таким образом, необходимо должным образом контролировать участок, на котором пересекаются контактные провода.
Пантограф используется главным образом для установки (прокладки) контактных проводов и выполнен с возможностью контроля высоты и точек контакта контактных проводов.
В качестве средства измерения пантографа используется специальное измерительное транспортное средство, которое называется транспортным средством контроля, транспортным средством контроля измерения нагрузки и т.п. Указанные транспортные средства используются через равные промежутки времени между коммерческими рейсами. К указанным измерительным транспортным средствам прикреплены датчики, предназначенные для измерения наклона корпуса транспортного средства, отклонения рельса и т.д. Одним из таких датчиков является измерительный датчик пантографа. К способам измерения пантографа относится способ лазерного излучения, способ обработки изображений и т.д. Указанные способы имеют следующие отличительные особенности.
1. В лазерном датчике главным образом используется способ сканирования. Пантограф сканируется лазерным лучом с помощью зеркала. Лазерный датчик представляет собой датчик, измеряющий расстояние до пантографа по разнице положений отраженных волн или по изменению формы излученного лазерного луча.
2. Способ обработки изображений представляет собой способ измерения пантографа путем подбора модели или образца.
Однако указанные способы не позволяют определить состояние установки контактных проводов, если пантограф и контактный провод не соприкасаются друг с другом.
Более того, в патентном документе 1 определяется центр тяжести объекта, который не соприкасается с пантографом, и тем самым измеряется пространственное положение. Однако стереоизмерение осуществляется с использованием двух камер.
Патентный документ 1: публикация патентной заявки Японии №2006-250775 «Детектор заграждений в зоне пантографа».
Патентный документ 2: публикация патентной заявки Японии №2002-139305 «Устройство для обнаружения препятствий на пути пантографа».
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Пантограф используется главным образом для контроля установки контактного провода (далее упоминаемого как пересечение, включая главную линию) с целью контроля высоты и точки контакта указанного провода. Способы измерения с использованием пантографа включают способ лазерного излучения, способ обработки изображений и т.д. С помощью указанных способов невозможно определить пространственное положение пересечения, если пантограф и пересечение не соприкасаются друг с другом.
Кроме того, в патентном документе 1 определяют центр тяжести объекта, который не соприкасается с пантографом, и тем самым определяют пространственное положение. Однако расстояние и другие параметры объекта распознают путем выполнения стереоизмерений. Таким образом, необходимо использовать несколько камер.
Более того, в патентном документе 2 указано, что изображение участка, расположенного вблизи пантографа, считывает одна камера, и, таким образом, измеряется высота пантографа и отклонение контактного провода.
Цель настоящего изобретения заключается в создании устройства для измерения параметров пересечений, легко измеряющего высоту и отклонение пересечения путем обработки изображений, полученных с помощью одной камеры.
Согласно настоящему изобретению устройство для измерения параметров пересечений включает датчик линии пересечения, установленный на крыше транспортного средства и предназначенный для обзора пересечения, датчик линии пантографа, установленный на крыше транспортного средства и ориентированный в направлении периферии пантографа, осветительный элемент, установленный на крыше транспортного средства и предназначенный для освещения пересечения, блок формирования изображения с датчика линии, предназначенный для получения изображений путем выстраивания во временной ряд сигналов яркости, полученных, соответственно, с датчика линии пересечения и с датчика линии пантографа, а также для запоминания изображений в качестве входных изображений, блок выполнения бинаризации способом анализа распознавания, предназначенный для получения бинарного изображения с датчика линии, в котором выделена область пересечения путем выполнения бинаризации способом анализа распознавания изображения с датчика линии, полученного блоком формирования изображения с датчика линии, блок удаления шумов, предназначенный для удаления шумов из бинарного изображения с датчика линии, подвергнутого бинаризации способом анализа распознавания блоком бинаризации способом анализа распознавания, блок определения границ области пересечения, предназначенный для определения границ области пересечения на бинарном изображении, из которого блоком удаления шумов удалены шумы, блок вычисления высоты области пересечения, предназначенный для определения ширины области пересечения на изображении по расстоянию между границами области пересечения, определенных блоком определения границ области пересечения, а также для определения высоты пересечения по фокусному расстоянию объектива, количеству пикселей датчика линии пересечения и разрешающей способности изображения на основании данных о размере пересечения, блок вычисления отклонения области пересечения, предназначенный для определения значения центра границ пересечения, определенных блоком определения границ пересечения, как центра тяжести пересечения, и для определения отклонения центра тяжести от центра на основании центра тяжести пересечения, установочной позиции датчика линии пересечения, фокусного расстояния объектива, ширины датчика, количества пикселей датчика и высоты пересечения, определенной блоком вычисления высоты области пересечения, блок вычисления высоты и положения пантографа, предназначенный для определения высоты и положения пантографа на основании бинарного изображения с датчика линии, из которого блоком удаления шумов удалены шумы, а также конструктивных данных пантографа, и блок вычисления относительного положения пантографа и пересечения, предназначенный для определения взаимного расположения пантографа и пересечения на основании высоты пантографа, определенной блоком вычисления высоты области пересечения, отклонения центра тяжести от центра, определенного блоком вычисления отклонения области пересечения, а также высоты и положения пантографа, определенных блоком вычисления высоты и положения пантографа.
Кроме того, в устройстве для измерения параметров пересечений, выполненном в соответствии с настоящим изобретением, в качестве осветительного элемента используется натриевая лампа, и на датчике линии пересечения установлен полосовой фильтр, предназначенный для пропускания излучения только длиной волны испускаемого натриевой лампой света.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой схему устройства для измерения параметров пересечений, выполненного в соответствии с основной идеей настоящего изобретения.
Фиг.2А представляет собой изображение пересечения с датчика линии (исходное изображение).
Фиг.2В представляет собой бинарное изображение сдатчика линии.
Фиг.3 представляет собой изображение границ пересечения.
Фиг.4 представляет собой изображение границ, на котором определен центр тяжести.
Фиг.5 представляет собой блок-схему измерения пересечения согласно основной идее настоящего изобретения.
Фиг.6 представляет собой функциональную схему устройства для измерения параметров пересечений согласно основной идее настоящего изобретения.
Фиг.7 представляет собой схему устройства для измерения параметров пересечений, выполненного в соответствии с третьим вариантом выполнения настоящего изобретения.
Фиг.8 представляет собой блок-схему процесса измерения пересечений согласно третьему варианту выполнения настоящего изобретения.
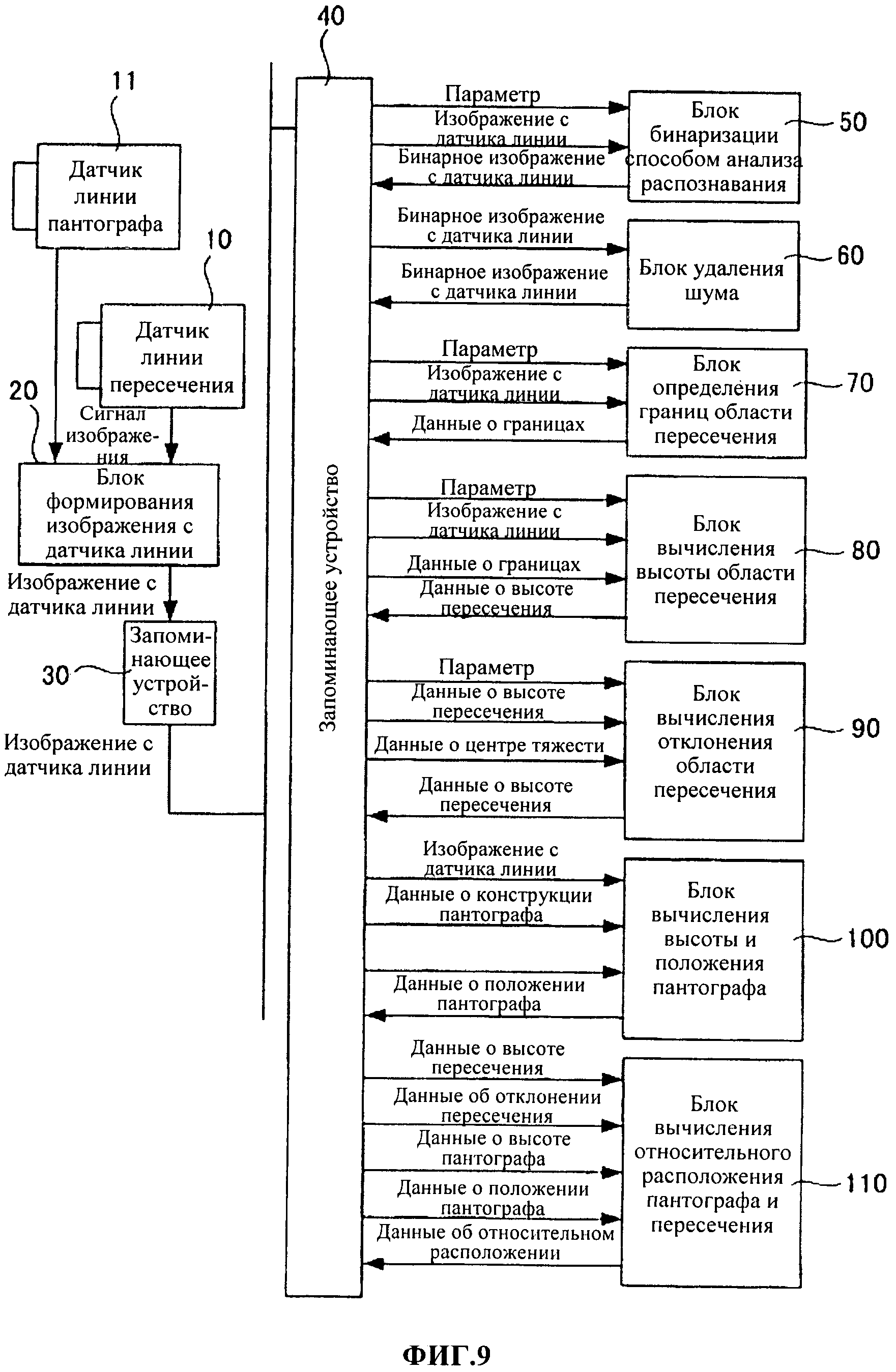
Фиг.9 представляет собой функциональную схему устройства для измерения параметров пересечений, выполненного в соответствии с третьим вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже описаны преимущества, достигаемые благодаря основной идее настоящего изобретения.
1. Возможность определения пространственного положения пересечения с использованием одной камеры.
2. Возможность выполнения процедуры на высокой скорости хода, поскольку способ является бесконтактным, а также возможность измерения участка пути или дистанции на дальнем расстоянии и за короткий период времени.
3. Благодаря конструкции устройства датчик установлен вдалеке от имеющихся конструкций, таких как стрелочный перевод, воздушный блок или анкер. Опасность столкновения с имеющейся конструкцией отсутствует. Можно выполнять непрерывное измерение, даже находясь в положении, в котором находятся имеющиеся конструкции.
4. Измерение можно проводить путем выполнения бинаризации способом анализа распознавания независимо от яркости изображения, считываемого при отклонении и т.п. пересечения.
5. В принципе, можно получить изображение с датчика линии на всех участках пути и получить данные изображения пересечения и имеющихся конструкций на земле вблизи пересечения на проверяемом участке пути.
6. Не требуется учитывать влияние излучения на человека, характерное для использования лазерного излучения. Простота обслуживания.
7. Не требуется принимать свет, отраженный от пересечения с помощью обычного отражения. Следовательно, полностью отсутствует необходимость точного выставления источника света и светопринимающего устройства.
8. Изображение с датчика линии на участке измерения записывается. Следовательно, можно проверить проблемную область пересечения путем проверки изображения указанной области.
9. Можно узнать, соответствует ли положение перекрещивания пересечения нормативному положению, и контролировать захлестывание пантографа.
Более того, в качестве элемента осветительного средства используется натриевая лампа. К датчику пересечения прикреплен полосовой фильтр, передающий только излучение длиной волны испускаемого натриевой лампой света. С его помощью можно задерживать окружающий или возмущенный свет, например, наружный и солнечный свет, чтобы получить хорошее изображение и повысить точность результата.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
1 Основная идея
В настоящем изобретении в качестве средства ввода изображения применяют датчик линии, а в качестве освещения используют обычное белое освещение (свет). Датчик линии расположен на крыше контролирующего или проверяющего транспортного средства таким образом, что он ориентирован вверх в вертикальном направлении. Датчик линии расположен таким образом, чтобы линия сканирования датчика линии была перпендикулярна направлению хода контролирующего транспортного средства и чтобы линия сканирования пересекалась с пересечением (см. фиг.1). Сигналы яркости линии сканирования, получаемые от датчика линии, выстраиваются во временные ряды с получением изображение с датчика линии (плоское изображение). Изображения запоминаются как входные изображения. Ширина пересечения, характеризующаяся яркостью, полученной в результате обработки изображения, определяется следующим образом.
1.1. Выделение области пересечения путем бинаризации
Для того чтобы отделить пересечение от фоновой области, нужно определить пороговое значение. Когда пороговое значение определено как фиксированное значение, возникают проблемы, заключающиеся в том, что в результате считывания изображения случайно выделяются и извлекаются участки, не относящиеся к пересечению, или само пересечение не выделяется.
Соответственно, для решения проблемы отклонения пересечения и разницы интенсивностей отраженного света используется способ бинаризации с использованием анализа распознавания. Указанный способ представляет собой способ определения порогового значения в соответствии с изображением. На гистограмме каждого изображения имеется «блок из ряда пикселей, объединенных зоной с определенным значением яркости» (далее - класс). Определяется сравнительно хорошее пороговое значение для любых изображений, при котором соотношение между дисперсией внутри класса и дисперсией между классами как для зоны фона, так и зоны образца при бинаризации максимизировано.
При использовании данного способа формируют такое бинарное изображение с датчика линии, что область пересечения становится белой, а область фона становится черной (см. фиг.2).
1.2 Удаление шума из бинарного изображения с датчика линии
При формировании бинарного изображения из простого изображения с датчика линии с использованием операции бинаризации или преобразования в двоичную форму, возникает проблема, заключающаяся в том, что бинарное изображение с датчика линии включает мелкий точечный шум, возникающий из-за дефектов области пересечения и качества фоновой области.
Поэтому для удаления указанного шума выполняется операция растяжения и сжатия при бинаризации.
1.3 Определение границ области пересечения
В бинарном изображении с датчика линии, из которого удалены шумовые сигналы и имеющиеся конструкции, определяются обе боковые границы области пересечения, представленной белым цветом. При поиске указанных граничных точек по одной линии слева можно определить точку, в которой цвет изменяется с черного цвета, соответствующего фону, на белый цвет, соответствующий пересечению, как левую граничную точку области контактного провода, и определить точку, в которой цвет изменяется с белого цвета, соответствующего области контактного провода, на черный цвет, соответствующий фону, как правую граничную точку области пересечения.
Данная операция выполняется для каждой линии изображения сверху вниз для определения границ области пересечения применительно к одному бинарному изображению с датчика линии (см. фиг.3).
1.4 Вычисление высоты пересечения
Расстояние между граничными точками, расположенными по обеим сторонам одной линии сканирования датчика линии, вычисляется как ширина изображения области пересечения путем использования данных границ по обеим сторонам указанной области, определенных на бинарном изображении с датчика линии.
Размер установленного (проложенного) пересечения известен заранее. Эта информация вводится извне. Разрешающая способность изображения (разрешение) (в мм/пиксель), которая является показателем реального размера (в мм) по отношению к 1 пикселю, вычисляется по фокусному расстоянию объектива, ширине датчика и количеству пикселей датчика. Определяется высота от датчика линии до пересечения.
Более того, высота от рельса до датчика линии известна заранее. Высота от рельса до пересечения определяется путем добавления высоты от рельса к высоте датчика линии.
1.5 Вычисление отклонения пересечения
Центральное значение обоих боковых граничных данных области пересечения, определенных по бинарному изображению с датчика линии, устанавливается как центр тяжести пересечения (см. фиг.4).
Величина отклонения центра тяжести от центра определяется по положению (в пикселях) центра тяжести и положению установки датчика линии на изображении, фокусному расстоянию объектива, ширине датчика, количеству пикселей датчика и высоте пересечения, определенной в п.1.4.
Определенные таким образом данные о границах, данные об области пересечения, изображение с датчика линии, используемое для вычислений, соответствующий номер линии и т.п. записываются. Согласно настоящему изобретению можно определить «высоту и отклонение» (далее - пространственное положение) пересечения, которое не входит в контакт с пантографом, с помощью одной камеры и неконтактным способом. Более того, это можно использовать на высокоскоростном ходу и для измерения на большом расстоянии за короткий период времени.
Более того, благодаря конструкции устройства датчик установлен в положении вдали от имеющихся конструкций, таких как стрелочный перевод, воздушный блок и анкер. Следовательно, устранена опасность столкновения с имеющимися конструкциями. В принципе, можно получить изображение с датчика линии на всех участках пути. Можно получить данные изображения пересечения и имеющихся конструкций на земле вблизи пересечения на проверяемом участке пути.
Более того, отсутствует сложность в обслуживании, характерная для использования лазерного луча, когда нужно учитывать влияние излучения на человека.
Кроме того, не требуется точно устанавливать источник света и светопринимающее устройство.
Более того, в любых условиях считывания изображения можно автоматически вычислить сравнительно хорошее пороговое значение. Можно решить проблему плохого выделения контактного провода из-за низкой яркости при постоянном пороговом значении. Кроме того, изображение с датчика линии сохраняется в виде данных. Следовательно, можно проверить проблемный участок пересечения путем проверки изображения указанного участка.
2. Использование натриевой лампы и полосового фильтра
В данном способе пересечение освещают с использованием натриевой лампы вместо обычного белого света.
Кроме того, на объективе камеры датчика линии установлен полосовой фильтр для передачи излучения только длиной волны испускаемого натриевой лампой света.
Это позволяет принимать только свет натриевой лампы, отраженный от пересечения, удалить окружающий свет, включая наружное освещение и солнечный свет, получить хорошее изображение и повысить точность измерения.
3. Измерение взаимного расположения пересечения и пантографа
Важным объектом проверки установки или прокладки пересечения является захлестывание пантографа. Пересечение входит в контакт с выступающей областью пантографа и пересекает ее. Чтобы не образовалось захлестывание, пересечение должно быть установлено в пределах нормативного значения.
Следовательно, датчик линии и т.п. направлен на пантограф (см. фиг.7), так что в дополнение к пространственному положению пересечения измеряется высота пантографа. Пространственное положение пантографа можно определить по измеренной высоте пантографа и конструктивному чертежу пантографа.
Более того, зная взаимное положение между установленным пространственным положением пантографа и пространственным положением пересечения, можно проверить, соответствует ли положение перекрещивания пантографа и пересечения нормативному положению.
Первый вариант выполнения
Далее со ссылкой на чертежи подробно описаны варианты выполнения в соответствии с настоящим изобретением.
На фиг.1-фиг.6 показан первый вариант выполнения согласно настоящему изобретению. На фиг.1 показан схематичный вид устройства для измерения параметров пересечений, выполненного в соответствии с основной идеей настоящего изобретения. На фиг.2А показано изображение пересечения, полученное с датчика линии (исходное изображение). На фиг.2 В показано бинарное (бинаризированное) изображение с датчика линии. На фиг.3 показано изображение границ пересечения. На фиг.4 показано изображение границ пересечения, на котором определен центр тяжести. На фиг.5 показана блок-схема операции измерения пересечения согласно основной идее настоящего изобретения. На фиг.6 показана функциональная схема устройства для измерения параметров пересечений согласно основной идее настоящего изобретения.
Как изображено на фиг.1, датчик 10 линии пересечения установлен на крыше транспортного средства 1 с целью обзора пересечения 2. Более того, на крыше транспортного средства 1 установлен источник 4 белого света, предназначенный для освещения пересечения 2. В дополнение к датчику 10 линии пересечения и источнику 4 белого света на крыше транспортного средства 1 установлен пантограф 6. Пантограф 6 входит в контакт с главной линией (проводом) 3.
Как изображено на фиг.6, устройство для измерения параметров пересечений, выполненное в соответствии с данным вариантом выполнения, включает датчик 10 линии пересечения, блок 20 формирования изображения с датчика линии, запоминающие устройства 30 и 40, блок 50 бинаризации способом анализа распознавания, блок 60 удаления шумов, блок 70 определения границ области пересечения, блок 80 вычисления высоты области пересечения и блок 90 вычисления отклонения области пересечения. Работа устройства осуществляется в соответствии блок-схемой, показанной на фиг.5.
Сначала блок 20 формирования изображения с датчика линии выстраивает во временные ряды сигналы изображения (сигналы яркости линии сканирования) пересечения 2, полученные с помощью датчика 10 линии, для формирования изображения с датчика линии, и запоминает его как входное изображение (этап S1).
Далее, когда блок 50 выполняет бинаризацию изображения с датчика линии, сформированного блоком 20, указанный блок 50 определяет сравнительно хорошее пороговое значение в соответствии с изображением путем бинаризации способом анализа распознавания и выделяет пересечение (этап S2). Например, на изображении с датчика линии (исходное изображение) в области пересечения формируется затенение (светлое и темное), как показано на фиг.2А. С другой стороны, на бинарном изображении с датчика линии область пересечения соответствует белому цвету, а область фона - черному, как показано на фиг.2В.
Затем блок 60 удаления шумов удаляет шум на бинарном изображении с датчика линии, бинаризированном блоком 50 бинаризации способом анализа распознавания (этап S3).
Кроме того, блок 70 определения границ области пересечения определяет границы с обеих сторон области пересечения, которые представлены белым цветом на бинарном изображении с датчика линии, из которого блоком 60 удалены шумы (этап S4). Например, как показано на фиг.3, точка, в которой цвет изменяется с черного, соответствующего фону, в белый, соответствующий области пересечения, определяется как левая граничная точка А области контактного провода, а точка, в которой цвет изменяется с белого, соответствующего области пересечения, в черный, соответствующий фону, определяется как правая граничная точка В области пересечения.
Блок 80 вычисления высоты области пересечения вычисляет расстояние между граничными точками А и В, расположенными по обеим сторонам одной линии сканирования датчика 10 линии, как ширину изображения области пересечения. Блок 80 вычисляет разрешение изображения (разрешающую способность) (в мм/пикс), которая является показателем реального размера (в мм) по отношению к одному пикселю, по данным о размерах пересечения, фокусному расстоянию объектива, ширине датчика и количеству пикселей датчика, которые известны заранее, и определяет высоту от датчика 10 линии до пересечения 2 (этап S5).
Затем, как изображено на фиг.4, блок 90 вычисления отклонения области пересечения устанавливает среднее значение данных о границе с обеих сторон области пересечения, определенных по бинарному изображению с датчика линии, в качестве положения С центра тяжести пересечения. Блок 90 определяет величину отклонения положения С центра тяжести от центра по положению (в пикселях) центра тяжести и установочному положению датчика линии на изображении, фокусному расстоянию объектива, ширине датчика, количеству пикселей датчика и высоте пересечения 2, определенной на этапе S5 (пункт 1.4) (этап S6).
Как описано выше, устройство для измерения параметров пересечений, выполненное в соответствии с данным вариантом выполнения, включает средство (блок 20 формирования изображения с датчика линии) для формирования изображения с датчика линии путем использования датчика 10 линии и для его запоминания в качестве входного изображения, средство (блок 50 бинаризации способом анализа распознавания) для выделения пересечения из входного изображения с датчика линии путем бинаризации способом анализа распознавания, средство (блок 60 удаления шумов) для удаления шумов из бинарного изображения с датчика линии, средство (блок 70 определения границ области пересечения) для определения границ пересечения, средство (блок 80 вычисления высоты области пересечения) для вычисления высоты пересечения и средство (блок 90 вычисления отклонения области пересечения) для вычисления отклонения пересечения. Таким образом, можно вычислить отклонение пространственного положения пересечения.
Второй вариант выполнения
В устройстве для измерения параметров пересечений, выполненном в соответствии с данным вариантом выполнения, вместо обычной лампы 4 белого света, используемой в первом варианте выполнения, используется натриевая лампа. На объективе камеры датчика 10 линии установлен полосовой фильтр, передающий только излучение длиной волны испускаемого натриевой лампой света. Другие конструктивные элементы идентичны элементам первого варианта выполнения.
Таким образом, данный вариант выполнения позволяет добиться того же эффекта, что и в первом варианте выполнения. Кроме того, улавливается только свет натриевой лампы, отраженный от пересечения. Таким образом, можно удалить общий свет, включая наружный и солнечный, чтобы получить хорошее изображение и тем самым повысить точность результатов.
Третий вариант выполнения
На фиг.7-фиг.9 показан третий вариант выполнения настоящего изобретения. На фиг.7 показан схематический вид устройства для измерения параметров пересечений, выполненного в соответствии с третьим вариантом выполнения настоящего изобретения. На фиг.8 показана блок-схема измерения пересечения согласно третьему варианту выполнения настоящего изобретения. На фиг.9 показана функциональная схема устройства для измерения параметров пересечений, выполненного в соответствии с третьим вариантом выполнения.
Как изображено на фиг.7, в данном варианте выполнения в дополнение к устройству первого варианта выполнения на крыше транспортного средства 1 установлен датчик 11 линии пантографа, ориентированный в направлении периферии пантографа 6. Кроме того, на крыше транспортного средства 1 установлена осветительная лампа 5, предназначенная для освещения пантографа 6. Другие конструктивные элементы аналогичны первому варианту выполнения.
В устройстве для измерения параметров пересечений, изображенном на фиг.9 и выполненном в соответствии с данным вариантом выполнения, в дополнение к первому варианту выполнения добавлен блок 100 вычисления высоты и положения пантографа и блок 110 вычисления относительного положения пантографа и пересечения. Работа установки осуществляется в соответствии с блок-схемой, изображенной на фиг.8.
Сначала блок 20 формирования изображения с датчика линии выстраивает во временные ряды сигналы изображения (сигналы яркости линии сканирования) пересечения 2, полученные с помощью датчика 10 линии пересечения, для формирования изображения с датчика линии, и выстраивает во временные ряды сигналы изображения (сигналы яркости линии сканирования) пантографа 6, полученные с помощью датчика линии 11 пантографа, для формирования изображения с датчика линии. Блок 20 формирования изображения с датчика линии запоминает указанные входные изображения (этап S1).
Этапы S2-S6 идентичны тем же этапам первого варианта выполнения.
Далее блок 100 вычисления высоты и положения пантографа измеряет высоту пантографа 6 по бинарному изображению с датчика линии, полученному с помощью датчика 11 линии пантографа и сформированному в виде изображения с датчика линии, из которого удален шум. Кроме того, на основании измеренной высоты указанного пантографа и его конструктивных параметров блок 100 вычисления высоты и положения пантографа вычисляет пространственное положение пантографа 6 (этап S7).
Кроме того, блок 110 вычисления относительного положения пантографа и пересечения определяет относительное расположение пантографа и пересечения по высоте пересечения, определенной блоком 80, отклонению центра тяжести от центра, определенному блоком 90 вычисления отклонения области пересечения, и высоте и положению пантографа, определенным блоком 100 (этап S8).
Таким образом, устройство для измерения параметров пересечений, выполненное в соответствии с данным вариантом выполнения, позволяет достичь того же эффекта, что и в первом варианте выполнения. В данном варианте выполнения к устройству для измерения параметров пересечений первого варианта выполнения добавлено средство (датчик 1 линии пантографа) для получения изображения пантографа 6, средство (блок 100 вычисления высоты и положения пантографа) для вычисления высоты пантографа и определения пространственного положения пантографа по конструктивному чертежу пантографа и средство (блок 110 вычисления относительного положения пантографа и пересечения) для определения взаимного расположения пересечения 2 и пантографа 6. Зная относительное расположение установленного пространственного положения пантографа 6 и пространственного положения пересечения 2, можно проконтролировать, соответствует ли положение скрещивания пантографа и пересечения нормативному положению.
Устройство для измерения параметров пересечений, выполненное в соответствии с данным изобретением, может быть широко использовано в качестве устройства для измерения положения проводки путем, в частности, высоты и отклонения пересечения, путем обработки изображений.
Реферат
Устройство для измерения параметров пересечений содержит: датчик линии пересечения, предназначенный для обзора пересечения, датчик линии пантографа, ориентированный в направлении периферии пантографа, осветительный элемент, предназначенный для освещения пересечения, блок формирования изображения с датчика линии, предназначенный для формирования изображения с датчика линии, а также для запоминания указанных изображений в качестве входных изображений. Устройство также содержит блок бинаризации способом анализа распознавания, предназначенный для формирования бинарного изображения, блок удаления шумов, предназначенный для удаления шумов из бинарного изображения, блок определения границ области пересечения, предназначенный для определения границ области пересечения на бинарном изображении, блок вычисления высоты области пересечения, предназначенный для определения ширины области пересечения на изображении, блок вычисления отклонения области пересечения, предназначенный для определения значения центра границ пересечения и для определения отклонения центра тяжести от центра, блок вычисления высоты и положения пантографа и блок вычисления относительного положения пантографа и пересечения, предназначенный для определения взаимного расположения пантографа и пересечения. Техническим результатом является более точное измерение параметров пересечений путем обработки изображений, полученных с помощью одной камеры. 1 з.п. ф-лы, 9 ил.
Формула
датчик линии пересечения, установленный на крыше транспортного средства и предназначенный для обзора пересечения,
датчик линии пантографа, установленный на крыше указанного транспортного средства и ориентированный в направлении периферии пантографа,
осветительный элемент, установленный на крыше указанного транспортного средства и предназначенный для освещения пересечения,
блок формирования изображения с датчика линии, предназначенный для формирования изображения с датчика линии путем выстраивания во временной ряд сигналов яркости, полученных соответственно с датчика линии пересечения и датчика линии пантографа, а также для запоминания указанных изображений в качестве входных изображений,
блок бинаризации способом анализа распознавания, предназначенный для формирования бинарного изображения с датчика линии, в котором область пересечения выделена путем бинаризации способом анализа распознавания изображения, полученного с датчика линии и сформированного блоком формирования изображения,
блок удаления шумов, предназначенный для удаления шумов из бинарного изображения с датчика линии, к которому применена бинаризация способом анализа распознавания с помощью блока бинаризации,
блок определения границ области пересечения, предназначенный для определения границ области пересечения на бинарном изображении с датчика линии, из которого блоком удаления шумов удалены шумы,
блок вычисления высоты области пересечения, предназначенный для определения ширины области пересечения на изображении по расстоянию между границами области пересечения, определенными блоком определения границ области пересечения, а также для определения высоты пересечения по фокусному расстоянию объектива, количеству пикселей датчика линии пересечения и разрешающей способности изображения на основании данных о размере пересечения,
блок вычисления отклонения области пересечения, предназначенный для определения значения центра границ пересечения, определенных блоком определения границ пересечения, как центра тяжести пересечения, и для определения отклонения центра тяжести от центра на основании центра тяжести пересечения, позиции установки датчика линии пересечения, фокусного расстояния объектива, ширины датчика, количества пикселей датчика и высоты пересечения, определенной блоком вычисления высоты области пересечения,
блок вычисления высоты и положения пантографа, предназначенный для определения высоты и положения пантографа на основании бинарного изображения с датчика линии, из которого блоком удаления шумов удалены шумы, а также конструктивных данных пантографа, и
блок вычисления относительного положения пантографа и пересечения, предназначенный для определения взаимного расположения пантографа и пересечения на основании высоты пересечения, определенной блоком вычисления высоты области пересечения, отклонения центра тяжести от центра, определенного блоком вычисления отклонения области пересечения, а также высоты и положения пантографа, определенных блоком вычисления высоты и положения пантографа.
Комментарии