Способ бесконтактного измерения скорости и/или длины экструдата в продольном направлении, в частности, кабеля - RU2460038C2
Код документа: RU2460038C2
Чертежи

Описание
Область техники
Изобретение относится к способу бесконтактного измерения скорости и/или длины экструдата, протягиваемого в продольном направлении, в частности кабеля по пункту 1 формулы изобретения.
Уровень техники
Существует большая потребность в точном измерении длины произведенного экструдата, например жил, кабеля, труб или шлангов. Например, установка по производству изолирующих оболочек производит, например, объем кабеля стоимостью примерно 30 миллионов евро в год. Любая экономия в отношении таких объемов производства означает создание дополнительной стоимости. Так, например, можно сэкономить около 30 тысяч евро в год, если можно будет уменьшить длину произведенного материала на 0,1%.
Известен способ бесконтактного измерения длины экструдата или полотна по принципу смещения частоты (эффект Доплера). При измерении так называемых листовых материалов, например бумаги, стального листа, ткани или иных материалов, этот метод блестяще себя зарекомендовал. Однако при измерении длины экструдированных продуктов, например кабелей, возникают проблемы.
Сущность изобретения
Таким образом, задачей изобретения является разработка способа бесконтактного измерения скорости и/или длины протягиваемого в продольном направлении экструдата, например кабеля, позволяющего получить точные результаты измерений по существу без ошибок.
Эта задача решается с помощью признаков, раскрываемых в пункте 1 формулы изобретения.
Изобретение исходит из того факта, что дифракционная картина, полученная на ограниченном отрезке (участке) кромки экструдата, характерна для этого отрезка экструдата и отличается от дифракционных картин, полученных на последующих отрезках экструдата. Если при помощи приемной поверхности подходящего датчика изображений и в результате анализа дифракционной картины обнаруживается, что однажды полученная дифракционная картина или характерный признак дифракционной картины снова проявляется в пространственно удаленной точке, то на основании времени, прошедшего между получением первой дифракционной картины и получением совпадающей дифракционной картины во второй точке, а также расстояния между точками можно определить скорость, с которой экструдат прошел участок между первой и второй точками. Если описанный процесс повторяют постоянно, то в любой момент времени становится возможным рассчитать скорость экструдата и, тем самым, точно определить длину, даже если скорость подачи экструдата была подвержена колебаниям.
Использование дифракционной картины в измерительных целях известно из документа ЕР 0924493. В известном способе измерения определяется диаметр экструдата, в частности кабеля малого диаметра, при помощи веерообразного луча монохромного точечного источника света, направленного на экструдат перпендикулярно ему. Тень экструдата проецируется на строчный светочувствительный датчик известной конструкции. Измеренные сигналы датчика, определяемые дифракцией, позволяют судить о положении дифракционной границы в измерительном пространстве. Хотя на основании явления дифракции нельзя непосредственно определить границы геометрической тени по распределению интенсивности попадающего на датчик излучения, их можно вывести из установившихся дифракционных границ.
Согласно изобретению дифракционные картины, то есть характерные признаки измеренных распределений интенсивности, используются для маркировки отрезков поверхности экструдата в целях определения времени, за которое маркированная поверхность пройдет участок от первой точки до второй точки. Прибытие во вторую точку определяется по достаточной степени совпадения характерных признаков дифракционной картины, полученной в первой точке, с характерными признаками дифракционной картины, полученной во второй точке. Корреляция между первой и второй дифракционными картинами или, соответственно, их характерными признаками определяется предпочтительно при помощи так называемой функции взаимной корреляции. В сигнальном анализе функция взаимной корреляции известным образом применяется для описания корреляции двух сигналов при различном временном смещении между сигналами.
В способе согласно изобретению первый оптический луч направляют перпендикулярно экструдату на одной из его сторон. Луч принимается первой принимающей поверхностью первого датчика изображений в заданной первой точке на противоположной стороне экструдата. На кромке экструдата происходит дифракция, и соответствующие дифракционные картины - то есть распределение интенсивности принимаемого излучения - отображаются на границе тени на первой принимающей поверхности. Происходит получение и анализ дифракционных картин. Дифракционная картина имеет типичную форму, то есть форму кривой с несколькими постепенно уменьшающимися максимумами. Положение максимума на датчике изображений характерно для контура экструдата в рассматриваемом месте. Поэтому для анализа соответствующей дифракционной картины может использоваться один или несколько максимумов. Также возможно точно вычислить математическим методом по дифракционной картине соответствующие границы тени и рассматривать их. В любом случае анализ дифракционной картины позволяет составить характеристику освещенного контура кромки экструдата, даже если неровности поверхности неразличимы невооруженным глазом. Таким образом, изобретение использует полученные на основании дифракционных картин характеристики с целью определения характерных признаков поверхности экструдата, что позволяет найти время, за которое некоторый характерный признак поверхности пройдет определенный отрезок пути. На основании полученных сведений может быть рассчитана скорость.
С указанной целью на вторую принимающую поверхность первого или второго датчика изображений, расположенную в направлении подачи экструдата во второй точке, отстоящей на некоторое расстояние от первой точки первой принимающей поверхности, на той же стороне, что и первая принимающая поверхность, направляется второй оптический луч, проходящий перпендикулярно экструдату аналогично первому лучу. Разумеется, может использоваться один и тот же источник света, луч которого попадает как на первую, так и на вторую принимающую поверхность. Также могут быть предусмотрены отдельные источники света, расположенные на некотором расстоянии друг от друга в продольном направлении экструдата. Это будет описано дополнительно ниже.
На второй принимающей поверхности на границах тени также отображаются дифракционные картины, которые также принимаются и анализируются, как уже было описано выше. Анализирующее устройство определяет, через какой промежуток времени характерные признаки первой дифракционной картины, полученной на первой принимающей поверхности, будут приблизительно коррелировать с характерными признаками второй дифракционной картины, полученной на второй принимающей поверхности. На основании расстояния между принимающими поверхностями или, соответственно, точками получения отображения признаков первой и второй дифракционных картин на принимающих поверхностях и величины временного промежутка определяется скорость подачи экструдата, а на основании полученной скорости - длина протянутого экструдата.
По сравнению с фокусирующим оптическим анализом поверхности экструдата преимущество изобретения состоит в том, что отсутствует необходимость в применении оптики. Улучшенная оптика не допускает разрешений ниже 5 мкм, поэтому ее точность ограничена, не говоря уже о стоимости. Изобретение не требует фокусировки и обеспечивает высокое разрешение. Поэтому для реализации способа согласно изобретению достаточно минимальных отклонений поверхности, чтобы их можно было распознать и маркировать с помощью дифракционной картины. Изменение удаленности экструдата от источника света или датчика изображений приводит к различным растяжениям дифракционной картины, но не изменяет ее характерных признаков.
В способе согласно изобретению предпочтительно используется два датчика изображений, принимающие поверхности которых состоят из строк и столбцов. Подходящие датчики изображений с высоким разрешением в целом известны. Они имеют разрешение, например, 1280×1024 пикселей. Датчики изображений устанавливаются, например, на расстоянии 50 мм. Также можно использовать только один датчик изображений и выбрать первую и вторую точки получения дифракционной картины в разных точках принимающей поверхности единственного датчика изображений. Разумеется, расстояние между точками приема в этом случае будет малым.
Возможно получить первый и второй световые лучи, создающие дифракционные картины на принимающих поверхностях через кромку экструдата, с помощью одного единственного источника света. Согласно одному из вариантов осуществления изобретения используются первый и второй дивергентные лучи от точечных источников света, расположенных на некотором расстоянии друг от друга в продольном направлении экструдата. Точечные источники света известным образом дают веерный луч. Точечные источники света представляют собой, например, подходящие полупроводниковые лазеры, дающие по существу монохромный свет. От оптических средств, расположенных между точечными источниками света и датчиками изображений, можно отказаться. Аппаратные затраты на осуществление способа согласно изобретению достаточно низки.
Свет оптического луча может лежать в видимой или в примыкающей к ней невидимой области спектра.
Управление датчиками изображений или принимающими поверхностями согласно следующему варианту осуществления изобретения осуществляется таким образом, что получение первой и второй дифракционных картин выполняется с заданной частотой, а их характерные признаки сохраняются в памяти. Если скорость подачи экструдата известна, можно приблизительно рассчитать, какое время необходимо для того, чтобы дифракционная картина, полученная в первой точке, или, соответственно, ее характерные признаки, коррелировала во второй точке с полученной там дифракционной картиной или, соответственно, ее характерными признаками. Точка корреляции на второй принимающей поверхности может, однако, варьироваться и зависит от фактической скорости или, соответственно, фактической длины экструдата, которая не может быть измерена с достаточной точностью с помощью обычных измерителей скорости, например тахогенераторов или подобных устройств. Таким образом, точка совпадения или корреляции дифракционных картин на второй принимающей поверхности в большинстве случаев смещается относительно базовой линии, например средней линии принимающей поверхности, если этому умышленно не воспрепятствовать. Поэтому еще один вариант осуществления изобретения предусматривает получение второй дифракционной картины со сдвигом по фазе относительно первой дифракционной картины, причем величина сдвига по фазе соответствует величине временного промежутка, который отделяет точку совпадения первой дифракционной картины или, соответственно, ее характерных признаков со второй дифракционной картиной или, соответственно, ее характерными признаками на второй принимающей поверхности от средней или базовой линии второй принимающей поверхности. Если бы для второго луча использовался параллельный свет, то необходимости в сдвиге по фазе бы не было, поскольку с помощью колонок датчика изображений точка совпадений первой и второй дифракционных картин или, соответственно, их характеризующих признаков могла бы быть безошибочно определена без каких-либо дополнительных действий. В случае веерного луча, напротив, расстояние до средней оси веерного луча естественным образом содержит ошибку, и таким образом измерение будет точнее, если точка корреляции, по возможности, будет попадать в середину второй принимающей поверхности или на базовую линию принимающих поверхностей, выровненную по средней оси, или в точку, совпадающую с осью веерного луча или, соответственно, точечного источника света.
Способ согласно изобретению может быть также применен для определения движения экструдата, например, в начале производства. С этой целью с помощью первого датчика изображений или, соответственно, первой принимающей поверхности и анализирующего устройства определяется, имеют ли отстоящие друг от друга во времени дифракционные картины или их характеризующие признаки пространственное смещение друг относительно друга. Если это так, то это позволяет установить факт движения экструдата, а также направление его движения.
Более или менее гибкий экструдат, например кабель, при производстве или наматывании, например, на катушку образует провис, увеличивающий длину экструдата между двумя отстоящими друг от друга точками. По этой причине согласно варианту осуществления изобретения при приблизительно горизонтальном перемещении экструдата оптический луч направляют на нижнюю кромку экструдата. Таким образом, независимо от провиса измеряется фактическая длина экструдата.
Краткое описание чертежей
Ниже приводится более детальное описание изобретения на основании одного из вариантов осуществления, представленного на прилагаемых чертежах, на которых изображены:
Фиг.1: схема конструкции из точечного источника света и датчика изображений с осью измерения, расположенной перпендикулярно кабелю, а также вид дифракционной картины в указанной измерительной плоскости.
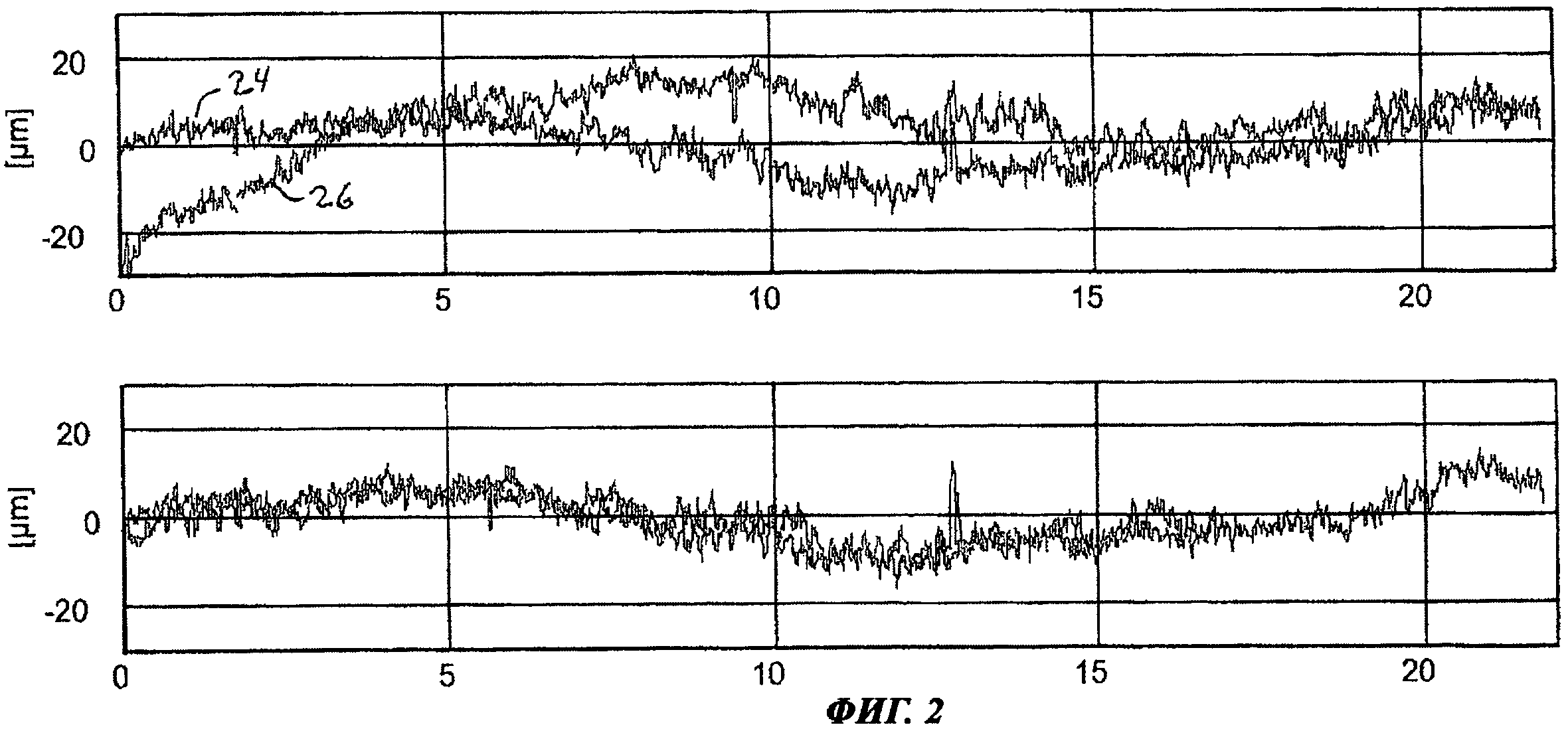
Фиг.2: графики распределения, например, первых максимумов дифракционных картин, полученных на продольных отрезках кабеля в соответствии с фиг.1, а именно в отстоящих друг от друга точках на датчике изображений.
Фиг.3: вид конструкции для осуществления способа согласно изобретению.
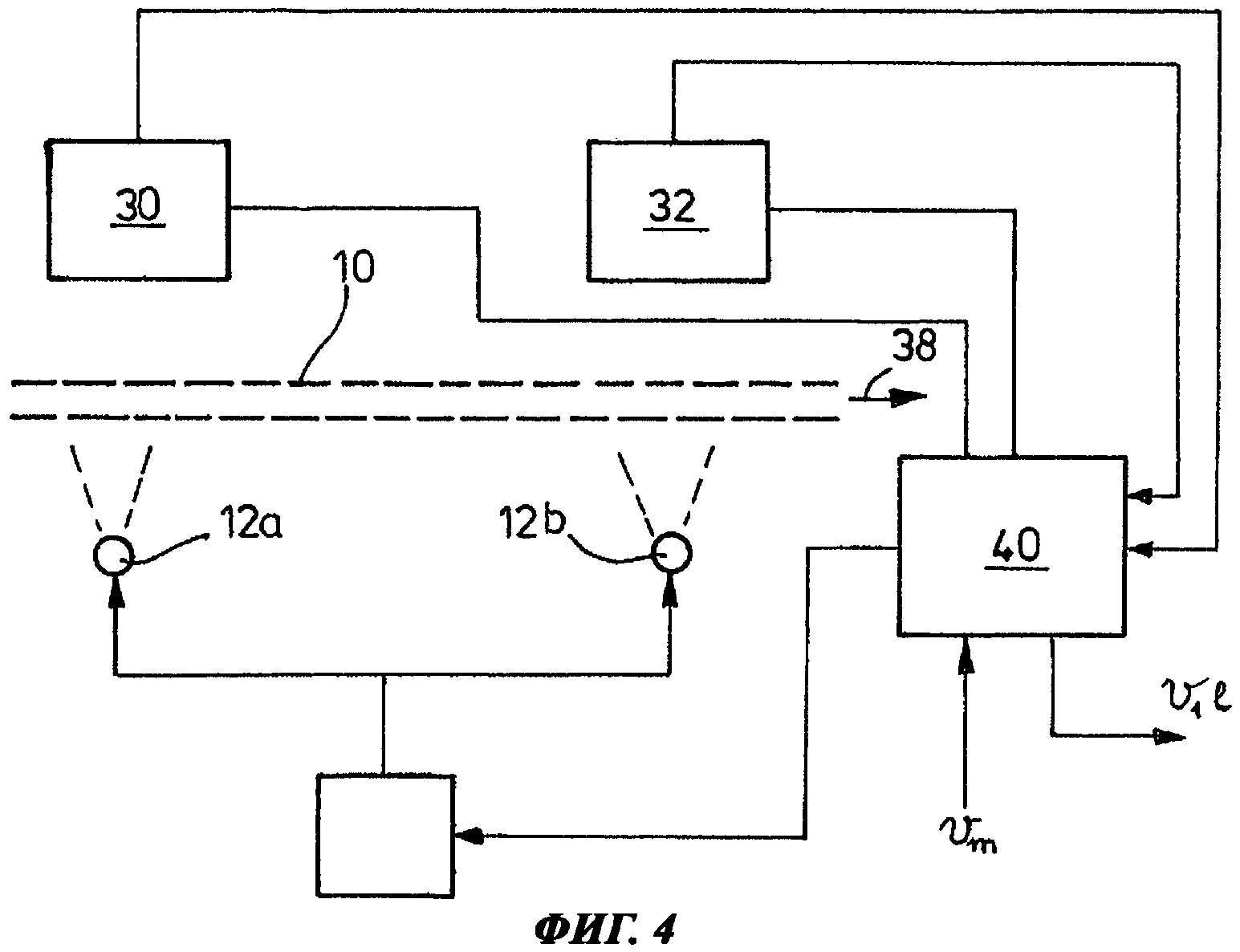
Фиг.4: блок-схема способа согласно изобретению.
Осуществление изобретения
На фиг.1 показан кабель 10, ось которого направлена перпендикулярно плоскости чертежа. Точечный источник света 12, например полупроводниковый лазер, генерирует веерный луч 14, направленный перпендикулярно оси кабеля 10. На датчике 16 изображений, имеющем, например, колонки с разрешением 1280 пикселей и строки с разрешением 1024 пикселя, отображается тень 18. На границе тени у точки 20 происходит дифракция, которая характеризуется распределением 21 интенсивности принимаемого света. Представленное распределение 21 располагается внутри одной колонки датчика 16 изображений, который в перпендикулярном плоскости чертежа направлении имеет, например, 1024 колонки. Номером 23 обозначен первый максимум. Номером 22 обозначен первый минимум. Фактическая граница тени находится на переходе от значения амплитуды, соответствующей темноте, к первому максимуму дифракционной границы.
Дифракционная картина зависит от свойств поверхности оболочки кабеля, то есть ее контура. Даже если поверхность исключительно гладкая, она все равно будет иметь определенные неровности или структуру, которая может быть обнаружена при помощи датчика изображений с высокой разрешающей способностью и дифракционного эффекта. На фиг.2 сверху номером 24 обозначена кривая первых максимумов первой дифракционной картины, а номером 26 - кривая первых максимумов второй дифракционной картины. Дифракционные картины были получены с одного и того же продольного отрезка кабеля в разные моменты времени. Поскольку обе диаграммы относятся к одному и тому же участку поверхности, они могут быть приблизительно совмещены путем смещения, как показано на фиг.2 внизу. Для получения корреляции необходимо сместить обе диаграммы 24, 26 примерно на 340 столбцов на поверхности датчика 16 изображений, что соответствует расстоянию 3,8 мм.
На фиг.3 снова показан кабель 10, а также первый точечный источник света 12a и второй точечный источник света 12b, установленные на некотором расстоянии друг от друга, причем это расстояние измеряется параллельно продольной оси кабеля 10. Источник света 12a генерирует первый веерный луч 14a, а второй источник света 12b - второй веерный луч 14b. Точечные источники света 12a и 12b, как и ранее, образованы полупроводниковым лазером. Со стороны кабеля 10, противоположной стороне размещения источников света 12a и 12b, расположены датчики изображений, обозначенные их принимающими поверхностями 30, 32. Расстояние между средними линиями принимающих поверхностей 30, 32 датчиков изображений равняется 50 мм. Точечные источники света 12a и 12b, как описано выше, по нижней кромке кабеля 10 создают на принимающих поверхностях 30, 32 дифракционные картины, обозначенные номерами 36 и 37. Кабель 10 подается в направлении стрелки 38 со скоростью 'v'. Скорость может быть измерена с помощью подходящего устройства измерения скорости, например тахогенератора на вытяжном шнеке или подобного устройства. Однако значение скорости vm, измеренное таким образом, будет недостаточно точным.
Дифракционная картина, отображенная на принимающей поверхности 30, появляется также на второй принимающей поверхности 32, когда соответствующий участок поверхности кабеля 10 достигнет второй принимающей поверхности 32. Отображенные дифракционные картины характеризуются определенными признаками, например своими первыми максимумами, несколькими минимумами и уменьшающейся амплитудой максимумов, математически рассчитываемой точной границей тени и т.п. Если было определено время, необходимое дифракционной картине 36, то есть ее характеризующему признаку, для перехода от определенной точки на первой принимающей поверхности к определенной точке на второй принимающей поверхности 32, то на основании этого может быть определена точная скорость 'v' кабеля 10, поскольку известно расстояние между принимающими поверхностями 30, 32 или, соответственно, указанными определенными точками.
Совпадение дифракционных картин или корреляция их характеризующих признаков может быть определена при помощи функции взаимной корреляции. Требуется не полное 100%-ное совпадение, а максимально возможное, позволяющее с уверенностью утверждать, что дифракционная картина, полученная на первой принимающей поверхности 30, является той дифракционной картиной, которая максимально соответствует дифракционной картине, отображенной на принимающей поверхности 32, и таким образом, что точки поверхности кабеля на первой и второй принимающих поверхностях совпадают. Поэтому точка совпадения геометрически удалена от первой точки получения дифракционной картины или, соответственно, ее характеризующего признака на принимающей поверхности 30.
В описанном способе измерения получение дифракционных картин на принимающих поверхностях 30, 32 производится через определенные промежутки времени, предпочтительно с заданной частотой. По измеренной другим способом скорости vm кабеля 10 можно приблизительно определить временной промежуток, через который первая дифракционная картина появится в точке нахождения второй принимающей поверхности 32. Точное положение определяется путем определения точки совпадения характеризующих признаков на принимающей поверхности 32, что может быть легко осуществлено с помощью колонок принимающей поверхности датчика изображений, причем эта точка в большинстве случаев смещена относительно средней или базовой линии. При определении скорости 'v' это смещение не критично, если на кабель и датчики изображений направлены параллельные лучи. Однако в рассмотренном случае предусмотрено использование веерных лучей, и получение дифракционной картины в точке, смещенной, например, относительно средней линии второй принимающей поверхности, в зависимости от обстоятельств, может привести к неточности измерения. Для устранения этого недостатка получение дифракционной картины на второй принимающей поверхности происходит со сдвигом по фазе относительно получения дифракционной картины на первой принимающей поверхности. Этот сдвиг по фазе определяется по смещению найденной точки совпадения первой и второй дифракционных картин относительно этой средней линии. Если эта точка смещена, например, в направлении первой принимающей поверхности, то получение дифракционной картины на второй принимающей поверхности происходит с небольшой задержкой, благодаря чему точка получения второй дифракционной картины попадает приблизительно в область средней линии.
На фиг.4 кабель 10 обозначен пунктирными линиями. Кроме того, показаны принимающие поверхности 30, 32 согласно фиг.3, а также точечные источники света 12a и 12b. Сигналы изображения с принимающих поверхностей 30, 32 или датчиков изображений поступают в анализирующее устройство 40. Датчики изображений управляются анализирующим устройством 40 с заданной частотой, причем, как уже упоминалось, датчик изображений с принимающей поверхностью 32 активируется со сдвигом по фазе в соответствии с пространственным смещением точки совпадения первой и второй дифракционных картин относительно средней или базовой линии на второй принимающей поверхности 32. В анализирующем устройстве 40 происходит анализ отображенных дифракционных картин, например по первым максимумам, по результатам которого строится характеристика соответствующего участка поверхности оболочки кабеля. Кроме того, анализирующее устройство определяет, как было описано выше, корреляцию характеризующих признаков дифракционных картин, а на основании полученных данных - скорость 'v' и, таким образом, длину кабеля 10.
Направление света на нижнюю кромку кабеля учитывает провис, который обычно имеет место.
Анализ отстоящих друг от друга во времени первых дифракционных картин или их характеризующих признаков на первой принимающей поверхности позволяет также судить о том, движется ли кабель, и в каком направлении он движется. Если кабель неподвижен, то все первые дифракционные картины совпадают. Если кабель движется, то одинаковые дифракционные картины отстоят друг от друга в пространстве.
Реферат
Способ содержит этапы: направляют первый и второй оптический луч перпендикулярно экструдату и принимают его посредством первой принимающей поверхности первого датчика изображений в заданной первой точке на противоположной стороне экструдата; анализируют в заданные моменты времени первые дифракционные картины, отображенные на границах тени на первой принимающей поверхности, с целью определения, по меньшей мере, одного характеризующего контур поверхности признака и сохраняют его; направляют второй оптический луч перпендикулярно экструдату на вторую принимающую поверхность первого или второго датчика изображений, расположенную в направлении подачи экструдата во второй точке, отстоящей от первой точки первой принимающей поверхности, на той же стороне, что и первая принимающая поверхность; анализируют вторые дифракционные картины с целью определения, по меньшей мере, одного характеризующего контур поверхности признака; определяют, через какой промежуток времени характеризующий признак первой дифракционной картины будет приблизительно коррелировать с характеризующим признаком второй дифракционной картины, определяют скорость подачи экструдата и длину протянутого экструдата. Технический результат - повышение точности результатов измерений. 9 з.п. ф-лы, 4 ил.
Формула
- направляют первый оптический луч перпендикулярно экструдату на одной из его сторон и принимают его посредством первой принимающей поверхности первого датчика изображений в заданной первой точке на противоположной стороне экструдата;
- анализируют в заданные моменты времени первые дифракционные картины, отображенные на границах тени на первой принимающей поверхности, с целью определения, по меньшей мере, одного специфичного, характеризующего контур поверхности признака, и сохраняют признак, характеризующий контур поверхности;
- направляют второй оптический луч перпендикулярно экструдату на вторую принимающую поверхность первого или второго датчика изображений, расположенную в направлении подачи экструдата во второй точке, отстоящей на некоторое расстояние от первой точки первой принимающей поверхности, на той же стороне, что и первая принимающая поверхность;
- анализируют вторые дифракционные картины, отображенные на границах тени на второй принимающей поверхности, с целью определения, по меньшей мере, одного характеризующего контур поверхности признака;
- определяют в анализирующем устройстве, через какой промежуток времени характеризующий признак первой дифракционной картины, полученной на первой принимающей поверхности, будет приблизительно коррелировать с характеризующим признаком второй дифракционной картины, полученной на второй принимающей поверхности;
- определяют скорость подачи экструдата на основании расстояния между принимающими поверхностями или, соответственно, точками получения отображения характеризующего признака первой и второй дифракционных картин на принимающих поверхностях и величины временного промежутка, а на основании полученной скорости - длину протянутого экструдата.
Комментарии