Лазерный датчик для обнаружения плотности частиц - RU2716878C2
Код документа: RU2716878C2
Чертежи




Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к лазерному датчику или модулю лазерного датчика с использованием интерференции самосмешения для обнаружения плотности частиц и связанному с этим способом обнаружения плотности частиц.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В CN102564909 раскрыты способ измерения мультифизических параметров самосмешения и лазерное устройство измерения мультифизических параметров самосмешения для атмосферных частиц. Лазерное устройство измерения мультифизических параметров самосмешения содержит лазер на микрочипе, коллимирующую линзу, светоделитель, собирающую линзу, фотодетектор, усилитель, плату сбора данных и анализатор спектра. Описанные способы и устройства являются сложными и дорогостоящими.
В US 2012/0242976 A1 раскрыто устройство, содержащее: излучающий элемент для испускания лазерного пучка, называемого излученным пучком; фокусирующий элемент для фокусирования излученного пучка на заданном фокусном расстоянии (D); приемный элемент для приема излученного пучка после отражения частицей в воздухе, называемого отраженным пучком; передающий элемент для передачи сигнала интерференции, возникающей между излученным пучком и отраженным пучком, в сигнальный процессор с целью получения по нему скорости частицы. Излучающий элемент содержит лазерный диод, и приемный элемент объединен с лазерным диодом путем самосмешения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание усовершенствованного модуля лазерного датчика для обнаружения плотности частиц.
В соответствии с первым аспектом предлагается модуль лазерного датчика для обнаружения плотности частиц. Модуль лазерного датчика содержит по меньшей мере один первый лазер, по меньшей мере один первый детектор и по меньшей мере один электрический драйвер. Первый лазер выполнен с возможностью испускания первого лазерного излучения в ответ на сигналы, выдаваемые упомянутым по меньшей мере одним электрическим драйвером. Упомянутый по меньшей мере один первый детектор выполнен с возможностью обнаружения первого интерференционного сигнала самосмешения оптической волны внутри первого лазерного резонатора первого лазера. Первый интерференционный сигнал самосмешения вызван первым отраженным лазерным излучением, повторно входящим в первый лазерный резонатор, причем, первое отраженное лазерное излучение отражается частицей, принимающей по меньшей мере часть первого лазерного излучения. Модуль лазерного датчика выполнен с возможностью сокращения многократных подсчетов частицы.
В случае если не используется подвижное зеркало или, в более общем случае, не осуществляется управление воздушным потоком или движением перед модулем лазерного датчика, выборочный объем воздуха априори неизвестен, и частица, которая находится в измеряемом объеме детектора частиц, может измеряться неоднократно из-за завихрений в воздушном потоке, которые позволяют частице циркулировать внутри и снаружи измеряемого объема. Такие двойные или даже многократные подсчеты одних и тех же частиц могли бы привести к тому, что плотность частиц оказывается слишком высокой. Поэтому предлагаются технические меры для исключения или по меньшей мере сокращения многократных подсчетов (включая двойные подсчеты) с целью выдачи плотности частиц с приемлемой точностью. Такие технические меры представляют собой, например, матрицу лазеров, увеличивающую объем выборки, в совокупности с оценочной электроникой, такой как контроллер. Контроллер может быть выполнен с возможностью определения многократных подсчетов с помощью результатов измерений, выдаваемых с помощью матрицы лазеров, и модели движения частиц. В качестве альтернативы, обновление воздуха может обеспечиваться выключением лазера или прерыванием измерения частиц. Точность обнаружения плотности частиц с помощью лазерной интерференции самосмешения может быть улучшена с помощью указанных мер, их комбинации и дополнительных мер, описываемых ниже. Первый лазер предпочтительно представляет собой полупроводниковый лазер, например, лазер с торцевым излучением или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Первый лазер может предпочтительно быть выполнен с возможностью испускания лазерного излучения с длиной волны свыше 750 нм в инфракрасном диапазоне спектра, более предпочтительно, между 780 нм и 1300 нм спектра длин волн.
Модуль лазерного датчика может, например, использоваться с целью обнаружения или оценки загрязнения воздуха. Модуль лазерного датчика может в качестве альтернативы использоваться при промышленных применениях, в которых может быть важна оценка плотности частиц. Модуль лазерного датчика может являться отдельным устройством или быть интегрированным в другое устройство.
Модуль лазерного датчика выполнен с возможностью прерывания обнаружения частиц на заданный период времени. Заданный период времени выбирается так, что многократное обнаружение частицы сокращается с целью уменьшения многократных подсчетов частицы. Заданный период времени предпочтительно значительно больше, чем время, необходимое для обновления воздуха в измеряемом объеме. Минимальная скорость воздушного потока в помещении составляет, например, около 0,1 м/с. Типичные размеры измерительного пятна, которое используется для определения первого интерференционного сигнала самосмешения, могут составлять, например, 10 мкм × 10 мкм × 200 мкм. Время, необходимое частице для прохождения объема измерительного пятна, составляет по меньшей мере 200 мкм/0,1 м/с=2 мс. Заданное время выключения лазера должно составлять значительно больше 2 мс. Время включения модуля лазерного датчика предпочтительно является настолько коротким, что объем воздуха не обновляется. Модуль лазерного датчика измеряет в этом случае в этом случае, в основном, измеряемый объем и наблюдает, присутствует ли частица. Поскольку присутствие частицы в измеряемом объеме является стохастическим процессом, можно экспериментально определить вероятность присутствия частицы в измеряемом объеме. Упомянутый по меньшей мере один электрический драйвер или первый детектор может быть выполнен с возможностью периодического прерывания обнаружения частиц с помощью первого интерференционного сигнала самосмешения. Электрический драйвер может, например, последовательно включать первый лазер на 0,25 мс с прерываниями на периоды 3 мс, в которые первый лазер выключен.
Модуль лазерного датчика дополнительно содержит контроллер. Контроллер может быть выполнен с возможностью оценки первого интерференционного сигнала самосмешения, выдаваемого датчиком, с целью подсчета частицы, причем контроллер выполнен с возможностью прерывания обнаружения частиц. Контроллер выполнен с возможностью прерывания оценки первого интерференционного сигнала самосмешения, выдаваемого первым датчиком, на заданный период времени. Контроллер выполнен с возможностью генерирования управляющего сигнала после обнаружения частицы. Контроллер выполнен с возможностью прерывания обнаружения частиц на заданный период времени после обнаружения частицы. Контроллер может, например, прерывать передачу сигнала от первого детектора к контроллеру. В качестве альтернативы контроллер может быть выполнен с возможностью передачи управляющего сигнала в электрический драйвер. Электрический драйвер может в этом случае быть выполнен с возможностью прерывания испускания первого лазерного излучения после приема управляющего сигнала на заданный период времени.
Расходимости пучка первого лазерного излучения могут быть низкими, в результате чего первое лазерное излучение не является обязательным для получения первого интерференционного сигнала самосмешения. Модуль лазерного датчика может в альтернативном подходе содержать по меньшей мере первое оптическое устройство. Первое оптическое устройство может быть выполнено с возможностью фокусирования первого лазерного излучения в первой области фокусирования для обнаружения частицы. Фокусирование первого лазерного излучения может увеличивать интенсивность первого отраженного лазерного излучения, повторно входящего в первый лазерный резонатор. Интенсивность сигнала для первого интерференционного сигнала самосмешения может вследствие этого быть увеличена.
Модуль лазерного датчика может содержать в альтернативном подходе матрицу лазеров. Матрица лазеров может содержать по меньшей мере первый лазер и второй лазер. Модуль лазерного датчика может дополнительно содержать контроллер. Второй лазер может быть выполнен с обеспечением возможности независимого обнаружения частицы с помощью второго интерференционного сигнала самосмешения, вызываемого вторым лазерным излучением, испускаемым вторым лазером. Контроллер может быть выполнен с возможностью сокращения многократных подсчетов частицы путем оценки по меньшей мере первого интерференционного сигнала самосмешения и второго интерференционного сигнала самосмешения. Сокращение многократных подсчетов частицы может осуществляться с помощью теоретической модели движения частиц, хранящейся, например, в контроллере. Теоретическая модель может обеспечивать определение совпадений обнаружения одной частицы с помощью упомянутых по меньшей мере первого и второго лазеров.
Первый интерференционный сигнал самосмешения и упомянутый второй интерференционный сигнал самосмешения могут измеряться одним общим первым детектором. Второй детектор может предусматриваться в альтернативном подходе с целью обеспечения независимых детекторов для обнаружения первого и второго интерференционного сигнала самосмешения. Модуль лазерного датчика может содержать по меньшей мере первое оптическое устройство. Первое оптическое устройство может быть выполнено с возможностью фокусирования по меньшей мере первого лазерного излучения в первой области фокусирования и второго лазерного излучения во второй области фокусирования так, что объем обнаружения для обнаружения плотности частиц увеличивается. Первое оптическое устройство может, например, представлять собой матрицу линз или матрицу микролинз. Матрица микролинз может, например, использоваться, если матрица лазеров cодержит единый чип полупроводниковых лазеров. Полупроводниковые лазеры могут, например, представлять собой лазеры поверхностного излучения с вертикальным резонатором (VCSEL).
Модуль лазерного датчика может дополнительно содержать по меньшей мере первое подвижное зеркало для отражения по меньшей мере первого и второго лазерного излучения так, что по меньшей мере первая и вторая области фокусирования перемещаются. Первое подвижное зеркало может быть выполнено с возможностью перемещения по меньшей мере первой и второй областей фокусирования так, что траектории первой и второй областей фокусирования не пересекаются. Возможно, целесообразно, чтобы линия лазеров не была параллельна направлению сканирования подвижного зеркала, чтобы каждая область фокусирования или измерительное пятно измеряли свой объем пространства. Различные объемы пространства задаются траекторией соответствующей области фокусирования.
Один общий детектор, например, первый детектор может использоваться для обнаружения первого интерференционного сигнала самосмешения, второго интерференционного сигнала самосмешения и других интерференционных сигналов самосмешения, которые могут генерироваться третьим, четвертым, пятым и т.д. лазером матрицы лазеров. Использование одного общего детектора может вызывать многократное обнаружение различных частиц в один момент времени. Различение такого множества интерференционных сигналов самосмешения может оказаться затруднительным, либо может использоваться более сложный контроллер. Контроллер может, например, быть выполнен с возможностью выключения по меньшей мере части лазеров, входящих в состав матрицы лазеров, с помощью электрического драйвера в зависимости от плотности частиц. Контроллер может, в частности, быть выполнен с возможностью управления электрическим драйвером так, что число лазеров матрицы лазеров, испускающей лазерное излучение, постоянно уменьшается, когда определенная плотность частиц постоянно растет. Число работающих лазеров может до известной степени быть уменьшено для достижения ситуации, в которой в один момент времени подсчитывается только одна частица. В более общем случае может применяться алгоритм, который определяет оптимальное число используемых лазеров в зависимости от концентрации обнаруженных частиц. Низкие концентрации приводят к большему числу используемых лазеров, при этом шум выше, но сканируется больший объем. Высокие концентрации приводят к меньшему числу используемых лазеров, при этом шум ниже, и сканируется меньший объем. С помощью этих мер могут быть улучшены скорость и точность обнаружения.
Контроллер может в качестве альтернативы или дополнительно быть выполнен с возможностью определения проекции первой скорости частицы вдоль оптической оси, параллельной первому или второму лазерному излучению, на основе первого или второго интерференционного сигнала самосмешения. Контроллер может дополнительно быть выполнен с возможностью сокращения многократных подсчетов частицы с использованием первой скорости. Первая скорость может использоваться для обеспечения оценки движения воздуха. Один способ получения этой оценки может состоять в использовании доплеровского смещения, имеющегося в обнаруженном первом или втором интерференционном сигнале самосмешения. Доплеровское смещение может давать оценку движения частицы и воздушного потока, содержащего частицу. Может быть определен не полный вектор скорости, а только проекция на направление распространения лазерного пучка первого и второго лазерного излучения. В качестве альтернативы, движение воздуха может контролироваться с использованием дополнительного датчика. Например, во время бега трусцой модуль лазерного датчика подсчитывает частицу, при этом информация о скорости может поступать от приложения, которое отслеживает скорость бегуна, или через среднюю скорость ветра, измеряемую на ближайшей метеостанции. Определение первой скорости может использоваться для сокращения многократных подсчетов частиц, если имеется только один первый лазер с соответствующим первым детектором или если имеется множество лазеров с одним или более детекторов.
Обнаружение первой скорости может, например, использоваться для адаптации заданного времени выключения первого лазера и/или первого детектора, как описано выше. Чем быстрее движется частица, тем короче может быть заданное время прерывания обнаружения. Контроллер может быть дополнительно выполнен с возможностью выдачи статистики на основе первой скорости различных частиц с целью обеспечения оценки того, имеется ли более или менее хаотичное движение или имеется ли предпочтительное направление движения частиц. Чем меньше распределение первых скоростей, тем выше вероятность того, что имеется предпочтительное направление движения частиц. Оценка в отношении движения частиц может использоваться для уточнения определения плотности частиц.
Устройство, такое как устройство мобильной связи (ноутбук, смартфон, клавиатура и т.п.) может содержать модуль лазерного датчика, описанный выше.
В соответствии с еще одним аспектом предлагается способ обнаружения плотности частиц. Способ включает в себя этапы:
- испускания первого лазерного излучения с помощью первого лазера,
- приема первого отраженного лазерного излучения в первом лазерном резонаторе первого лазера, причем первое отраженное лазерное излучение отражается частицей, принимающей по меньшей мере часть первого лазерного излучения,
- определения первого интерференционного сигнала самосмешения оптической волны в первом лазерном резонаторе первого лазера, причем первый интерференционный сигнал самосмешения вызван первым отраженным лазерным излучением, повторно входящего в первый лазерный резонатор,
- сокращения многократных подсчетов частицы.
Этапы способа не обязательно выполняются в порядке, указанном выше.
В соответствии с еще одним аспектом предлагается компьютерный программный продукт. Компьютерный программный продукт содержит средства кода, которые могут быть сохранены на по меньшей мере одном устройстве памяти модуля лазерного датчика по любому из пунктов 1-13 или на по меньшей мере на одном устройстве памяти из устройства, содержащего модуль лазерного датчика. Средства кода выполнены так, что способ по пункту 14 может осуществляться с помощью по меньшей мере одного устройства обработки модуля лазерного датчика по любому из пунктов 1-13 или с помощью по меньшей мере одного устройства обработки из устройства, содержащего модуль лазерного датчика. Устройство памяти или устройство обработки может входить в состав электрического драйвера и/или контроллера и/или устройства, содержащего модуль лазерного датчика. Первое устройство памяти и/или первое устройство обработки из устройства, содержащего модуль лазерного датчика, может взаимодействовать со вторым устройством памяти и/или вторым устройством обработки, входящим в состав модуля лазерного датчика.
Следует понимать, что модуль лазерного датчика по любому из пунктов 1-13 и способ по пункту 14 имеют аналогичные и/или идентичные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может также представлять собой любую комбинацию зависимых пунктов формулы изобретения с соответствующим независимым пунктом.
Дополнительные предпочтительные варианты осуществления определены ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные и прочие аспекты изобретения будут понятны из описываемых ниже вариантов осуществления и объяснены применительно к ним.
Далее изобретение описывается в качестве примера на основе вариантов осуществления со ссылкой на прилагаемые чертежи.
На чертежах:
на фиг. 1 изображена принципиальная схема модуля первого лазерного датчика,
на фиг. 2 изображена принципиальная схема модуля второго лазерного датчика,
на фиг. 3 изображена принципиальная схема модуля третьего лазерного датчика,
на фиг. 4 изображена принципиальная схема модуля четвертого лазерного датчика,
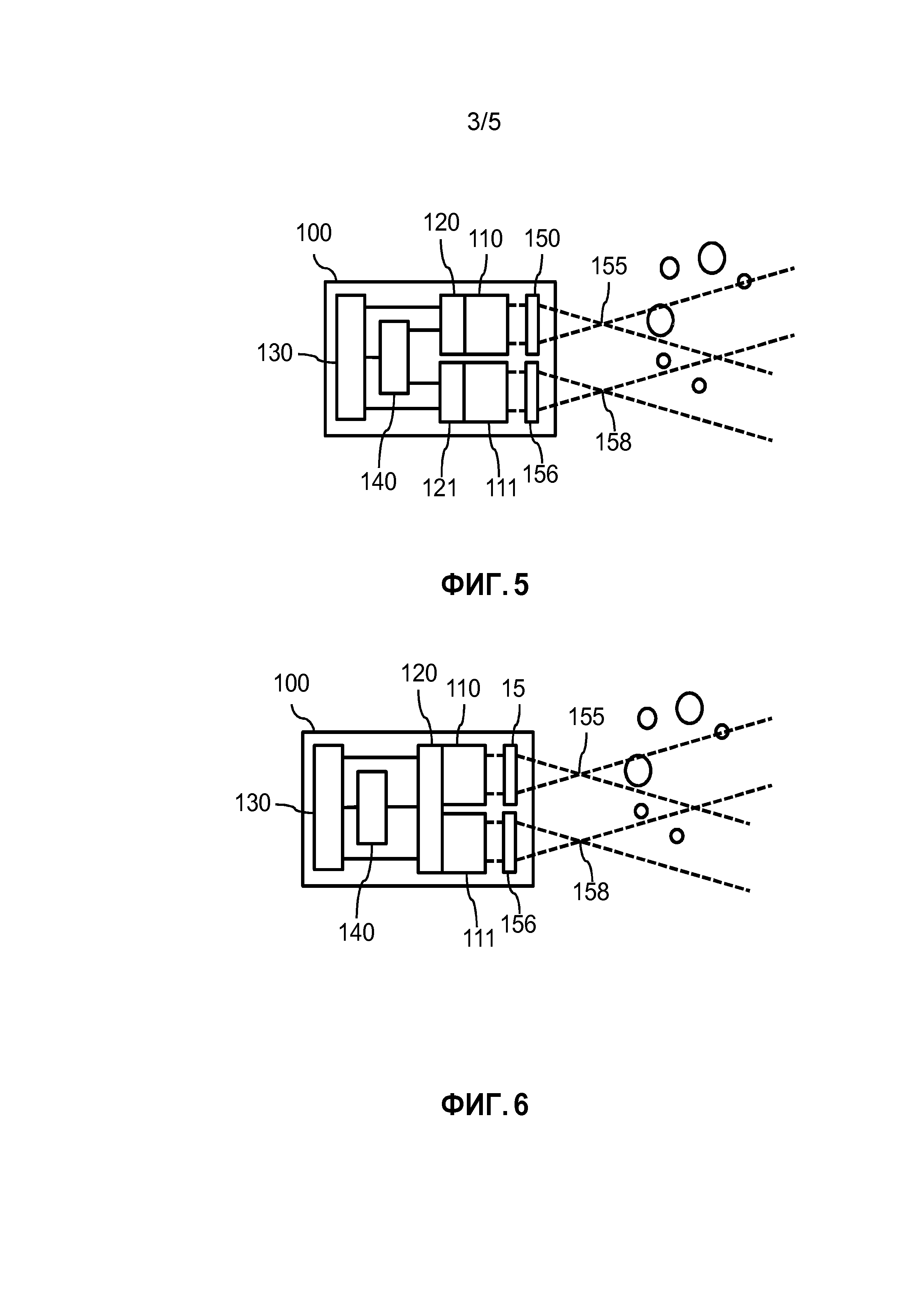
на фиг. 5 изображена принципиальная схема модуля пятого лазерного датчика,
на фиг. 6 изображена принципиальная схема модуля шестого лазерного датчика,
на фиг. 7 изображена принципиальная схема модуля седьмого лазерного датчика,
на фиг. 8 изображен первый вариант осуществления матрицы областей фокусирования,
на фиг. 9 изображено устройство мобильной связи, содержащее модуль лазерного датчика,
на фиг. 10 изображена принципиальная схема способа обнаружения плотности частиц.
Повсюду на чертежах одинаковые номера обозначают одинаковые объекты. Объекты на чертежах не обязательно выполнены в масштабе.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее с помощью чертежей описываются различные варианты осуществления изобретения.
Интерференция самосмешения используется для обнаружения перемещения объекта и расстояния до него. Дополнительная информация по интерференции самосмешения описывается в работах «Laser diode self-mixing technique for sensing applications», Giuliani, G.; Norgia, M.; Donati, S. и Bosch, T., Laser diode self-mixing technique for sensing applications, Journal of Optics A: Pure and Applied Optics, 2002, 4, с. 283-294, которые включены путем ссылки. Обнаружение движения кончика пальца относительно датчика в оптическом устройстве ввода подробно описывается в Международной заявке на патент № WO 02/37410. Раскрытие в отношении обнаружения расстояния и перемещения в Международной заявке на патент № WO 02/37410 включено в настоящий документ по ссылке.
Принцип интерференции самосмешения рассматривается на примерах, приведенных в Международной заявке на патент № WO 02/37410. Диодный лазер, имеющий лазерный резонатор, предусматривается для испускания лазерного или измерительного пучка. На своей верхней стороне устройство снабжено прозрачным окном, по которому перемещается объект, например, палец человека. Между диодным лазером и окном расположена линза, например, плоско-выпуклая линза. Эта линза фокусирует лазерный пучок на верхней стороне прозрачного окна или вблизи нее. Если в этом положении имеется объект, он рассеивает измерительный пучок. Часть излучения измерительного пучка рассеивается в направлении пучка освещения, и эта часть сводится линзой на поверхности излучения лазерного диода и повторно входит в резонатор данного лазера. Излучение, повторно входящее в резонатор диодного лазера, вызывает изменение в коэффициенте усиления лазера и тем самым в интенсивности излучения, испускаемого лазером, и это представляет собой явление, которое называется эффектом самосмешения и диодном лазере.
Изменение в интенсивности излучения, испускаемого лазером, может обнаруживаться предусмотренным для этой цели фотодиодом, который преобразует изменение излучения в электрический сигнал, а для обработки этого электрического сигнала предусмотрены электронные схемы.
Перемещение объекта относительно измерительного пучка приводит к тому, что отраженное им излучение претерпевает доплеровское смещение. Это означает, что частота данного излучения изменяется или что происходит смещение частоты. Это смещение частоты зависит от скорости, с которой перемещается объект, и составляет порядка от нескольких кГц до МГц. Излучение со смещением частоты, повторно входящее в лазерный резонатор, интерферирует с оптической волной или излучением, генерируемым в данном резонаторе, т.е. в данном резонаторе возникает эффект самосмешения. В зависимости от величины фазового сдвига между оптической волной и излучением, повторно входящим в резонатор, интерференция является усиливающей или отрицательной, т.е. интенсивность лазерного излучения периодически увеличивается или уменьшается. Частота модуляции лазерного излучения, генерируемого таким образом, в точности равна разности между частотой оптической волны в резонаторе и частотой излучения с доплеровским смещением, повторно входящего в резонатор. Разность частот составляет порядка от нескольких кГц до МГц и вследствие этого легко обнаружима. Комбинация эффекта самосмешения и доплеровского смещения вызывает изменение поведения лазерного резонатора; в частности, изменяется его коэффициент усиления или усиление излучения. Импеданс лазерного резонатора или интенсивность излучения, испускаемого лазером, может, например, измеряться, при этом не только может оцениваться величина перемещения объекта относительно датчика (т.е., пройденное расстояние), но и может определяться направление перемещения, как подробно описано в Международной заявке на патент № WO 02/37410.
На фиг. 1 изображена принципиальная схема модуля 100 первого лазерного датчика. Модуль первого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120. Интегральный первый детектор 120 представляет собой интегральный фотодиод, который составляет часть многослойной структуры первого лазера 110. Интегральный фотодиод определяет колебания оптической волны в первом лазерном резонаторе первого лазера. Модуль 100 первого лазерного датчика дополнительно содержит электрический драйвер 130. Электрический драйвер 130 подает электропитание в первый лазер 110 с целью испускания первого лазерного излучения. Первый лазер 110 представляет собой в этом случае лазер поверхностного излучения с вертикальным резонатором (VCSEL) с интегральным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического драйвера 130. Электрический драйвер 130 выдает порядок чередования различных схем модуляции в первый лазер 110. Постоянный ток обеспечивается в первой схеме модуляции. Ток возбуждения с треугольной схемой модуляции обеспечивается во второй схеме модуляции. Треугольная схема модуляции может использоваться для определения относительного расстояния в совокупности со скоростью между первым лазером 110 и частицей с помощью первого интерференционного сигнала самосмешения. Первая схема модуляции может использоваться для определения первой скорости частицы, параллельной оптической оси первого лазера 110, которая показана пунктирной линией. Измерительные сигналы первого детектора и информация о схеме возбуждения, применяемой электрическим драйвером 130, может приниматься устройством обработки (не показано), которое может размещаться в отдельном устройстве, либо модуль лазерного датчика может быть интегрирован в устройство, содержащее устройство обработки. Электрический драйвер 130 дополнительно выполнен с возможностью прерывания испускания первого лазерного излучения по меньшей мере на 4 мс, в результате чего риск двойных подсчетов или многократных подсчетов частицы с помощью первого интерференционного сигнала самосмешения исключается или по меньшей мере уменьшается.
На фиг. 2 изображена принципиальная схема модуля 100 второго лазерного датчика. Модуль 100 второго лазерного датчика содержит первый лазер 110. Первый детектор 120 установлен в качестве внешней измерительной схемы, которая определяет напряжение на первом лазерном резонаторе или, в более общем случае, импеданс первого лазерного резонатора, который зависит от первого интерференционного сигнала самосмешения. Модуль 100 первого лазерного датчика дополнительно содержит электрический драйвер 130. Электрический драйвер 130 подает электропитание в первый лазер 110 с целью испускания первого лазерного излучения. Первый лазер 110 представляет собой в этом случае полупроводниковый лазер торцевого излучения. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического драйвера 130. Электрический драйвер 130 выдает постоянный ток возбуждения таким образом, что лазерное излучение испускается первым лазером 110. Электрический драйвер 130 дополнительно выполнен с возможностью прерывания испускания первого лазерного излучения на 1 мс, в результате чего риск двойных подсчетов или многократных подсчетов частицы с помощью первого интерференционного сигнала самосмешения исключается или по меньшей мере уменьшается. Модуль 100 лазерного датчика дополнительно содержит устройство для обеспечения заданной скорости частиц. Устройство для обеспечения заданной скорости частиц содержит прозрачную трубку 182 и вентилятор 180 для перемещения газа или воздуха в трубке. Скорость вентилятора адаптируется к времени прерывания испускания первого лазерного излучения. Вместо вентилятора 180 может использоваться насос с целью обеспечения заданной скорости частиц.
В качестве альтернативы, может быть размещен нагреватель/охладитель с целью обеспечения движения воздуха с помощью конвекции. Информация о движении воздуха может использоваться для уточнения определения плотности частиц. Вентилятор может, например, быть выполнен с возможностью выдачи информации о скорости потока воздуха либо в модуль лазерного датчика, либо во внешнее устройство, которое содержит контроллер или устройство обработки, выполненное с возможностью определения плотности частиц на основе первого интерференционного сигнала самосмешения и дополнительной информации.
Модуль 100 лазерного датчика может в качестве альтернативы или дополнительно быть интегрирован в устройство, при этом устройство может перемещаться с целью обеспечения движения воздуха вокруг устройства. Дополнительные датчики, такие как датчики движения, могут использоваться с целью определения движения устройства и косвенным образом воздуха вокруг устройства. Информация в отношении движения может использоваться с целью определения плотности частиц.
На фиг. 3 изображена принципиальная схема модуля 100 третьего лазерного датчика. Модуль третьего лазерного датчика содержит первый лазер 110 и внешний первый детектор 120. Внешний первый детектор 120 представляет собой внешний фотодиод, а именно, он не интегрирован в лазерный резонатор, а может находиться на том же чипе лазера. Модуль 100 третьего лазерного датчика дополнительно содержит электрический драйвер 130, контроллер 140 и первое оптическое устройство 150. Контроллер 140 соединен с первым лазером 110 или, точнее, с первым детектором 120 и электрическим драйвером 130. Электрический драйвер 130 подает электропитание в первый лазер 110 с целью испускания первого лазерного излучения. Первый лазер 110 представляет собой в этом случае лазер поверхностного излучения с вертикальным резонатором (VCSEL) с интегральным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического драйвера 130. Электрический драйвер 130 выдает постоянный ток возбуждения. Контроллер 140 дополнительно принимает информацию от электрического драйвера 130. Первое лазерное излучение, испускаемое первым лазером 110, проходит первое оптическое устройство 150, которое выполнено с возможностью отражения части первого лазерного излучения в детектор 120. Первое оптическое устройство 150 может представлять собой, например, прозрачную пластину. Первое лазерное излучение содержит информацию о модуляции оптической волны в первом лазерном резонаторе первого лазера 110. Контроллер 140 принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала самосмешения. Частица может обнаруживаться в диапазоне вокруг первой области 155 фокусирования. Контроллер 140 дополнительно выполнен с возможностью выключения первого детектора на 4 мс после обнаружения частицы с помощью соответствующего управляющего сигнала после обнаружения частицы. Обеспечивается прохождение частицей пучка первого лазерного излучения во время прерывания обнаружения первого лазерного излучения таким образом, что двойные или многократные подсчеты частицы исключаются или по меньшей мере сокращаются.
На фиг. 4 изображена принципиальная схема модуля 100 четвертого лазерного датчика. Модуль четвертого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120. Интегральный первый детектор 120 представляет собой интегральный фотодиод, который составляет часть многослойной структуры первого лазера 110. Модуль 100 первого лазерного датчика дополнительно содержит электрический драйвер 130, контроллер 140 и первое оптическое устройство 150. Контроллер 140 соединен с первым лазером или, точнее, с первым детектором 120 и электрическим драйвером 130. Электрический драйвер 130 подает электропитание в первый лазер 110 с целью испускания первого лазерного излучения. Первый лазер 110 представляет собой в этом случае лазер поверхностного излучения с вертикальным резонатором (VCSEL) с интегральным фотодиодом. Модуль 100 лазерного датчика соединен с источником питания (не показан), выдающим питание, которое модулируется и подается с помощью электрического драйвера 130. Электрический драйвер 130 выполнен с возможностью выдачи постоянного тока возбуждения. Контроллер 140 принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала самосмешения. Контроллер 140 дополнительно принимает информацию от электрического драйвера 130. Первое лазерное излучение, испускаемое первым лазером 110, фокусируется с помощью первого оптического устройства 150 в первой области 155 фокусирования. Частица может обнаруживаться в некотором диапазоне вокруг первой области 155 фокусирования. Контроллер 140 дополнительно выполнен с возможностью выключения первого лазера 110 на 3 мс после обнаружения частицы с помощью соответствующего управляющего сигнала после обнаружения частицы. Обеспечивается прохождение частицей пучка первой области 155 фокусирования во время прерывания испускания первого лазерного излучения таким образом, что двойные или многократные подсчеты частицы исключаются или по меньшей мере сокращаются.
Первое оптическое устройство 150 может, например, содержать только одну линзу с заданным диаметром rlens. Первый интерференционный сигнал самосмешения пересчитывается в виде (1-exp[-(rlens/wpupil)^2])^2, где wpupil - параметр перетяжки гауссовского пучка первого лазерного излучения на зрачке линзы. Линза должна иметь некоторый минимальный диаметр, чтобы исключить потери сигнала из-за виньетирования обратнорассеянного или отраженного пучка первого лазерного излучения. Предпочтительный вариант осуществления должен иметь диаметр линзы > 1,1 диаметра зрачка (это соответствует потерям сигнала величиной 3 дБ). Еще лучше, если бы линза была > 1,5 диаметра зрачка гауссовского пучка (потери сигнала величиной 1 дБ).
На фиг. 5 изображена принципиальная схема модуля 100 пятого лазерного датчика. Модуль 100 пятого лазерного датчика содержит первый лазер 110 с интегральным первым детектором 120 и второй лазер 111 с интегральным вторым детектором 121. Первый лазер 110 и второй лазер 111 испускают первое и второе лазерное излучение с одной и той же длиной волны. Первый и второй лазер 110 и 111 могут предпочтительно испускать лазерное излучение с длиной волны свыше 750 нм в инфракрасном диапазоне спектра, предпочтительнее всего - между 780 нм и 1300 нм спектра длин волн. Модуль 100 пятого лазерного датчика содержит электрический драйвер 130, который выполнен с возможностью подачи тока возбуждения в первый лазер 110 и во второй лазер 111. Электрический драйвер содержит контроллер 140, который соединен с первым лазером 110 и вторым лазером 111. Модуль 100 пятого лазерного датчика дополнительно содержит первое оптическое устройство 150 для фокусирования первого лазерного излучения в первой области 155 фокусирования. Модуль 100 пятого лазерного датчика дополнительно содержит второе оптическое устройство 156 для фокусирования второго лазерного излучения во второй области 158 фокусирования. Контроллер 140 принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате первого интерференционного сигнала самосмешения, и электрические сигналы, выдаваемые вторым детектором 121, которые возникают в результате второго интерференционного сигнала самосмешения во втором лазерном резонаторе второго лазера 111. Контроллер 140 дополнительно принимает информацию от электрического драйвера 130. Параллельное обнаружение с помощью первого лазера 110 и второго лазера 111 и соответствующих детекторов увеличивает объем обнаружения. Увеличение объема обнаружения может оказаться полезным, если число частиц является довольно низким.
Число подсчетов частиц в единицу времени при характерных уровнях загрязнения воздуха в этом случае может быть низким. Это приводит к длительному времени измерения (> 3 с) с целью получения надежного выхода, например, величины РМ 2,5. Использование третьего лазера, четвертого лазера, пятого лазера или большего числа лазеров дополнительно уменьшило бы время измерения. Уменьшение времени измерения может увеличить риск обнаружения одной частицы с помощью первого и второго интерференционного сигнала самосмешения. Контроллер 140 может при этом быть выполнен с возможностью сокращения многократных подсчетов частицы путем оценки по меньшей мере первого интерференционного сигнала самосмешения и второго интерференционного сигнала самосмешения и при необходимости третьего, четвертого, пятого и т.д. интерференционных сигналов самосмешения. Уменьшение многократных подсчетов частицы может выполняться с помощью теоретической модели движения частиц, хранящейся, например, в контроллере 140. Теоретическая модель может обеспечивать определение совпадений обнаружения одной частицы с помощью по меньшей мере первого и второго лазера (и при необходимости дополнительных лазеров).
Модуль 100 лазерного датчика с двумя, тремя, четырьмя или более лазерами и соответствующими детекторами может использоваться с целью уменьшения времени обнаружения с помощью увеличенного объема обнаружения, как описано выше. Детекторы могут быть интегральными, например, интегральные фотодиоды, или внешними, например, внешние фотодиоды или измерительные схемы для определения импеданса лазерного резонатора. Может иметься либо один детектор для каждого лазера, либо детектор для группы или даже всех лазеров. Детекторы могут размещаться в матрице на одном полупроводниковом чипе, причем, полупроводниковый чип дополнительно содержит детектор или детекторы. Модуль 100 лазерного датчика может содержать контроллер 140. Анализ данных измерений, который может выполняться контроллером 140, может в качестве альтернативы выполняться с помощью внешних вычислительных устройств. В этом случае может не иметься контроллера 140, интегрированного в модель 100 лазерного датчика. Такой модуль лазерного датчика может использоваться независимо от сокращения двойных или многократных подсчетов, в частности, в случае заданного относительного движения воздуха (вентилятор, подвижное зеркало и т.д.).
На фиг. 6 изображена принципиальная схема модуля 100 шестого лазерного датчика. Конфигурация модуля 100 шестого лазерного датчика почти идентична конфигурации модуля 100 пятого лазерного датчика, описанного на фиг. 5. Различие состоит в том, что вместо двух детекторов для первого и второго лазеров используется один первый детектор 120 (фотодиод) в совокупности с одним контроллером 140, который может содержать усилитель и ASIC для цифровой обработки сигналов в отношении интерференционных сигналов самосмешения и управляющих данных или информации, выдаваемых электрическим драйвером 130. Поскольку при нормальных уровнях качества воздуха плотность частиц низка, большую часть времени детектор не обнаруживает частицу, и при использовании параллельно расположенных первого и второго лазеров 110, 111 (или большего числа лазеров в случае матрицы лазеров) число отсчетов в единицу времени увеличится, но вероятность обнаружения двух частиц в один и тот же момент времени при этом очень мала. Недостаток такой схемы расположения состоит в том, что фоновое излучение в сигнале светодиода увеличивается, поскольку только один лазер будет обеспечивать сигнал самосмешения частицы, в то время как остальные лазеры при этом освещают фотодиод. Это увеличит величину шума в интерференционном сигнале самосмешения. Интерференционный сигнал самосмешения, как правило, ограничен дробовым шумом. За счет удвоения интенсивности излучения на фотодиоде шум увеличится в квадратный корень двух. Размещение двух или даже более лазеров параллельно приведет к большему числу обнаруженных частиц, как описано выше, однако увеличение шума в результате ограничит число лазеров, которые могут использоваться параллельно. Таким образом, фактически коэффициент усиления на дополнительный лазер уменьшается.
На фиг. 7 изображена принципиальная схема модуля 100 седьмого лазерного датчика. Модуль 100 седьмого лазерного датчика содержит матрицу 100 лазеров с первым лазером 110 и множеством других лазеров, испускающих лазерное излучение. Модуль 100 седьмого лазерного датчика дополнительно содержит один общий первый детектор 120, электрический драйвер 130, контроллер 140, первое оптическое устройство 150 и подвижное зеркало 170. Контроллер 140 соединен с первым детектором 120, электрическим драйвером 130 и подвижным зеркалом 170. Электрический драйвер 130 подает электропитание в лазеры матрицы лазеров с целью испускания лазерного излучения. Электрический драйвер 130 выдает модулированный ток возбуждения (например, прямоугольный ток возбуждения). Контроллер 140 принимает выдаваемые первым детектором 120 электрические сигналы, которые возникают в результате интерференционного сигнала самосмешения и которые вызваны частицами, пересекающими область фокусирования одного из лазеров. Контроллер 140 дополнительно принимает информацию от электрического драйвера 130 и подвижного зеркала 170 с целью интерпретации интерференционных сигналов самосмешения, измеряемых первым детектором 120. Информация, выдаваемая электрическим драйвером 130, может содержать ток, выдаваемый в определенный момент времени. Контроллер 140 дополнительно выполнен с возможностью управления движением подвижного зеркала 170 с помощью соответствующих управляющих сигналов. Управляющие сигналы, выдаваемые контроллером 140, могут задавать угловую скорость, амплитуду движения зеркала и т.п. Первое оптическое устройство 150 выполнено с возможностью фокусирования лазерного излучения, испускаемого различными лазерами матрицы лазеров, в различные области фокусирования с целью увеличения объема обнаружения. Первое оптическое устройство 150 может, например, содержать матрицу микролинз. Первое оптическое устройство 150 может предпочтительно быть выполнено с возможностью фокусирования лазерного излучения в соответствующую область фокусирования после отражения с помощью подвижного зеркала 170.
В случае если движением воздуха не управляют, например, с помощью установки, описываемой на фиг. 2 (вентилятор), для перемещения пятна или областей фокусирования лазеров может быть использовано подвижное зеркало 170. Возможно, предпочтительно выбирать скорость перемещения областей фокусирования выше, чем нормальные скорости воздуха - от 0,1 до 1 м/с. Поэтому было бы целесообразно иметь величину 5-20 м/с. В этом случае величина числовой апертуры фокусирующей линзы 0,05-0,2 была бы оптимальной, когда частицы свыше 300 нм должны быть обнаружимыми (числовая апертура задается с использованием значения интенсивности 1/e^2 углового размера дальнего поля гауссовского пучка).
На фиг. 8 изображен первый вариант осуществления матрицы областей фокусирования, которая может обеспечиваться с помощью модуля 100 лазерного датчика, описываемого на фиг. 7. Матрица 200 лазеров в этом случае является линейной матрицей. Матрица 200 лазеров, первое оптическое устройство 150 и подвижное зеркало 170 расположены так, что, например, траектория 157 первой области 155 фокусирования не пересекается с траекториями остальных областей фокусирования. Возможно, целесообразно иметь линию лазеров, не параллельную направлению сканирования, таким образом, чтобы каждое пятно или область фокусирования измеряли свой объем пространства с целью увеличения объема обнаружения.
Лазеры, входящие в состав матрицы 200 лазеров, могут в альтернативном варианте осуществления размещаться в двумерной матрице лазеров (например, в квадратной структуре, гексагональной структуре и т.д.). Так же, как и в случае линейной структуры, структура конфигурации предпочтительно является такой, чтобы каждое лазерное пятно или область фокусирования измеряли свой собственный объем в пространстве, как описывается применительно к линейной структуре с фиг. 8.
Матрица 200 лазеров может содержать один полупроводниковый чип с одной подложкой и множество VCSEL для испускания лазерного излучения. Могут быть установлены соответствующие детекторы в виде лазерных диодов, которые могут размещаться в отдельной мезаструктуре (при необходимости с диаметром, отличным от генерирующих лазерное излучение мезаструктур в матрице). Отдельная мезаструктура может быть выполнена с возможностью приема спонтанно испускаемого излучения от различных VCSEL посредством отражений в подложке. Модуляция такого спонтанно испускаемого излучения с помощью эффекта интерференции самосмешения должна быть пропорциональна модуляции мощности лазера, но с отрицательным знаком. Эпитаксиальная структура может быть одинаковой для всех мезаструктур с фотодиодами, расположенными ближе к подложке.
Отдельные мезаструктуры могут в качестве альтернативы быть выполнены с возможностью приема лазерного излучения от лазеров в матрице. Это может быть реализовано, например, с помощью специально организованного обратного отражения, например, от первого оптического устройства 150. В данной структуре, возможно, необходимо подавлять отражение спонтанно испускаемого излучения посредством подложки полупроводникового чипа, например, с помощью зачерненной задней стороны или с помощью вытравливания канавок между мезаструктурами. Эпитаксиальная структура может в качестве альтернативы иметь фотодиоды на верхней поверхности мезаструктур, причем, эта часть стравливается для генерирующих лазерное излучение мезаструктур.
На фиг. 9 изображено устройство 190 мобильной связи, содержащее модуль 100 лазерного датчика. Устройство 190 мобильной связи содержит пользовательский интерфейс 191, устройство 192 обработки и основное устройство 193 памяти. Основное устройство 192 обработки соединено с основным устройством 193 памяти и с модулем 100 лазерного датчика. Основное устройство 192 обработки содержит по меньшей мере часть функциональностей контроллера 140, который описан выше. Основное устройство 192 обработки хранит данные, относящиеся к обнаружению частиц, в основном устройстве 193 памяти. В альтернативном варианте осуществления существует также возможность того, что основное устройство 192 обработки и основное устройство 193 памяти используются только для подготовки или адаптации данных, выдаваемых с помощью модуля 100 лазерного датчика, в результате чего данные могут быть представлены пользователю устройства 190 мобильной связи с помощью пользовательского интерфейса 191. Модуль 100 лазерного датчика запитывается с помощью источника питания устройства 190 мобильной связи.
На фиг. 10 изображена принципиальная схема способа обнаружения плотности частиц. На этапе 210 испускают первое лазерное излучение с помощью первого лазера 110. На этапе 220 первое отраженное лазерное излучение, которое отражается частицей, принимающей по меньшей мере часть первого лазерного излучения, отражают в первом лазерном резонаторе первого лазера 110. Первый интерференционный сигнал 30 самосмешения оптической волны в первом лазерном резонаторе первого лазера 110 обнаруживают на этапе 230. Первый интерференционный сигнал 30 самосмешения возникает в результате первого отраженного лазерного излучения, повторно входящего в первый лазерный резонатор. Многократные подсчеты частицы сокращают на этапе 240.
Несмотря на то, что изобретение подробно иллюстрировано и описано на чертежах и в вышеизложенном описании, такое иллюстрирование и описание следует считать наглядными или иллюстративными, а не ограничительными.
По результатам прочтения настоящего описания специалистам в данной области техники будут понятны другие модификации. Такие модификации могут предполагать другие признаки, которые уже известны на данном уровне техники и которые могут использоваться вместо уже описанных в данном документе признаков или в дополнение к ним.
По результатам изучения чертежей, описания и прилагаемой формулы изобретения могут быть поняты и реализованы модификации описываемых вариантов осуществления. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, а упоминание в единственном числе не исключает множества элементов или этапов. Само по себе то обстоятельство, что некоторые критерии излагаются в различных зависимых пунктах формулы изобретения, не означает, что совокупность этих критериев не может использоваться с пользой.
Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие ее объем.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
Реферат
Модуль лазерного датчика для обнаружения плотности частиц, а также соответствующий способ и компьютерный программный продукт. Модуль содержит по меньшей мере один первый лазер, по меньшей мере один первый детектор и по меньшей мере один электрический драйвер. Первый лазер выполнен с возможностью испускания первого лазерного излучения в ответ на сигналы, выдаваемые электрическим драйвером. Первый детектор выполнен с возможностью обнаружения первого интерференционного сигнала самосмешения оптической волны внутри первого лазерного резонатора первого лазера. Интерференционный сигнал самосмешения вызван отраженным лазерным излучением, повторно входящим в первый лазерный резонатор, причем первое отраженное лазерное излучение отражается частицей, принимающей по меньшей мере часть первого лазерного излучения. Модуль лазерного датчика выполнен с возможностью сокращения многократных подсчетов частицы. Технический результат - повышение точности и скорости работы модуля. 3 н. и 11 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство определения скорости
Комментарии