Устройство уменьшения погрешности чувствительности по давлению и температуре у высокоточных оптических измерительных преобразователей перемещения - RU2660413C2
Код документа: RU2660413C2
Чертежи






Описание
1. Область техники, к которой относится изобретение
Данное изобретение относится к способам и устройствам оптического измерения перемещения.
2. Предпосылки создания изобретения
Измерительные преобразователи перемещения, такие как акустические датчики и датчики давления, хорошо известны. В основе многих измерительных преобразователей перемещения лежит электрическая емкость, полное электрическое сопротивление или напряженность магнитного поля. Использование данных измерительных преобразователей перемещения на основе электрических и магнитных свойств ограничивается: низкой чувствительностью, необходимостью смещения высоких потенциалов, плохой электрической изоляцией, факторами окружающей среды и нелинейностью характеристик. Эти ограничения требуют наличия сверхкритической связи между конструкцией преобразователя и механической конструкцией датчика, что ведет к ограничению характеристики и функционального габарита измерительного преобразователя перемещения. Оптические измерительные преобразователи перемещения, такие как измерительные преобразователи перемещения с эталоном, нечувствительны к электрическим и магнитным полям и могут частично снять ограничения, свойственные измерительным преобразователям перемещения на основе электрических и магнитных полей.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству и способу оценки исследуемого параметра, использующее величину интенсивности луча, по меньшей мере, одного электромагнитного луча, проходящего, по меньшей мере, через часть оптического измерительного устройства.
Один из вариантов осуществления настоящего изобретения включает в себя устройство оценки исследуемого параметра, содержащее оптический измерительный преобразователь перемещения, включающий: оптическое измерительное устройство, способное принимать, по меньшей мере, один электромагнитный луч, оптическое измерительное устройство, содержащее: первую отражающую поверхность; вторую отражающую поверхность; третью отражающую поверхность, неподвижно закрепленную относительно второй отражающей поверхности; четвертую отражающую поверхность, неподвижно закрепленную относительно первой отражающей поверхности; первый переменный зазор между первой отражающей поверхностью и второй отражающей поверхностью; второй переменный зазор между третьей отражающей поверхностью и четвертой отражающей поверхностью; и, по меньшей мере, одну детекторную матрицу, способную принимать, по меньшей мере, часть одного электромагнитного луча.
Каждое относительное перемещение между первой отражающей поверхностью и второй отражающей поверхностью и относительное перемещение между третьей отражающей поверхностью и четвертой отражающей поверхностью может служить признаком исследуемого параметра. Оптическое измерительное устройство включает в себя средний элемент, содержащий вторую отражающую поверхность и третью отражающую поверхность. Средний элемент содержит чувствительную массу. Чувствительная масса может быть непрозрачной. Оптическое измерительное устройство включает в себя внешний элемент, содержащий первую отражающую поверхность и четвертую отражающую поверхность. Внешний элемент может содержать чувствительную массу. Оптическое измерительное устройство может быть настроено таким образом, чтобы разность между первым переменным зазором и вторым переменным зазором в основном сводилась к нулю при работе устройства в номинальных условиях. Номинальные условия включают в себя, по меньшей мере, одно из следующих условий: i) гравитационный ориентир; ii) нулевое усилие; iii) нулевое ускорение; iv) нулевое давление. По меньшей мере, один электромагнитный луч может включать в себя несколько электромагнитных лучей. Устройство способно направлять первый электромагнитный луч в первый переменный зазор, а второй электромагнитный луч во второй переменный зазор.
Другой вариант осуществления, в соответствии с настоящим изобретением, включает в себя устройство оценки исследуемого параметра, содержащее: оптический измерительный преобразователь перемещения, включающий в себя: по меньшей мере, один источник света, способный формировать, по меньшей мере, один начальный электромагнитный луч; оптическое измерительное устройство, способное принимать, по меньшей мере, один электромагнитный луч, содержащий, по меньшей мере, часть начального электромагнитного луча; по меньшей мере, один детектор, способный принимать, по меньшей мере, часть одного электромагнитного луча, принятого оптическим измерительным устройством и предоставлять данные, касающиеся исследуемого параметра; устройство управления источником света с обратной связью, содержащее оптический компонент в оптическом измерительном устройстве, устройство управления источником света с обратной связью, способное компенсировать изменения температуры в оптическом измерительном устройстве путем корректировки, по меньшей мере, одного источника света.
Устройство может включать в себя корпус, закрывающий оптическое измерительное устройство и оптический компонент. Корпус может быть герметизирован. Корпус может сохранять внутри вакуум. Оптический компонент включает в себя: светоделитель, способный разделять, по меньшей мере, один начальный электромагнитный луч, по меньшей мере, на один первый электромагнитный луч и, по меньшей мере, один второй электромагнитный луч; устройство управления оптическим измерительным устройством, способное принимать, по меньшей мере, один второй электромагнитный луч. Устройство включает в себя: по меньшей мере, один детектор, оптически связанный с оптическим компонентом, способный принимать часть, по меньшей мере, одного второго электромагнитного луча; управляющую электронику, функционально связанную, по меньшей мере, с одним детектором и, по меньшей мере, одним источника света и способную осуществлять управление с обратной связью, по меньшей мере, одним источником света, используя данные, по меньшей мере, от одного детектора.
Другой вариант осуществления, в соответствии с настоящим изобретением, включает в себя способ оценки исследуемого параметра в буровой скважине, пересекающей формацию. Способ включает в себя: спуск оптического измерительного устройства в буровую скважину; генерацию данных от оптического измерительного устройства, относящихся к относительному перемещению исследуемого параметра между двумя или несколькими отражающими поверхностями оптического измерительного устройства; предотвращение изменений в данных, в результате изменений в оптическом измерительном устройстве из-за: i) температуры или ii) давления, путем компенсации изменений в оптическом измерительном устройстве. Компенсация включает в себя корректировку, по меньшей мере, одного источника света, генерирующего электромагнитный луч, по меньшей мере, частично, принятого оптическим измерительным устройством в ответ на корректирующие данные, относящиеся к управлению оптическим измерительным устройством. Компенсация предусматривает использование оптического измерительного преобразователя перемещения, содержащего: первую отражающую поверхность; вторую отражающую поверхность; третью отражающую поверхность, неподвижно закрепленную относительно второй отражающей поверхности; четвертую отражающую поверхность, неподвижно закрепленную относительно первой отражающей поверхности; первый переменный зазор между первой отражающей поверхностью и второй отражающей поверхностью; второй переменный зазор между третьей отражающей поверхностью и четвертой отражающей поверхностью; и настройку оптического измерительного устройства таким образом, чтобы разность между первым переменным зазором и вторым переменным зазором в основном сводилась к нулю при работе устройства в номинальных условиях.
Примеры некоторых признаков изобретения, таким образом, обобщены достаточно широко в целях их лучшего понимания в нижеследующем подробном описании и оценки усовершенствования существующей техники. Существуют дополнительные признаки изобретения, описанные ниже, которые составляют предмет формулы изобретения, прилагаемой к настоящему документу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения сделаны ссылки на следующее подробное описание варианта осуществления, которое следует рассматривать совместно с прилагаемыми чертежами, на которых одинаковые позиции, как правило, обозначены одинаковыми цифрами.
На РИС. 1 представлено оптическое измерительное устройство, соединенное с каротажным кабелем, в соответствии с одним из вариантов осуществления настоящего изобретения.
На РИС. 2 представлено графическое изображение отраженного и переданного света в интерферометре Фабри-Перо, в соответствии с настоящим изобретением.
На РИС. 3 представлено графическое изображение оптических откликов в диапазоне падающих углов света в интерферометре Фабри-Перо, в соответствии с настоящим изобретением.
На РИС. 4 представлено схематическое изображение оптического измерительного устройства, в соответствии с одним из вариантов осуществления настоящего изобретения.
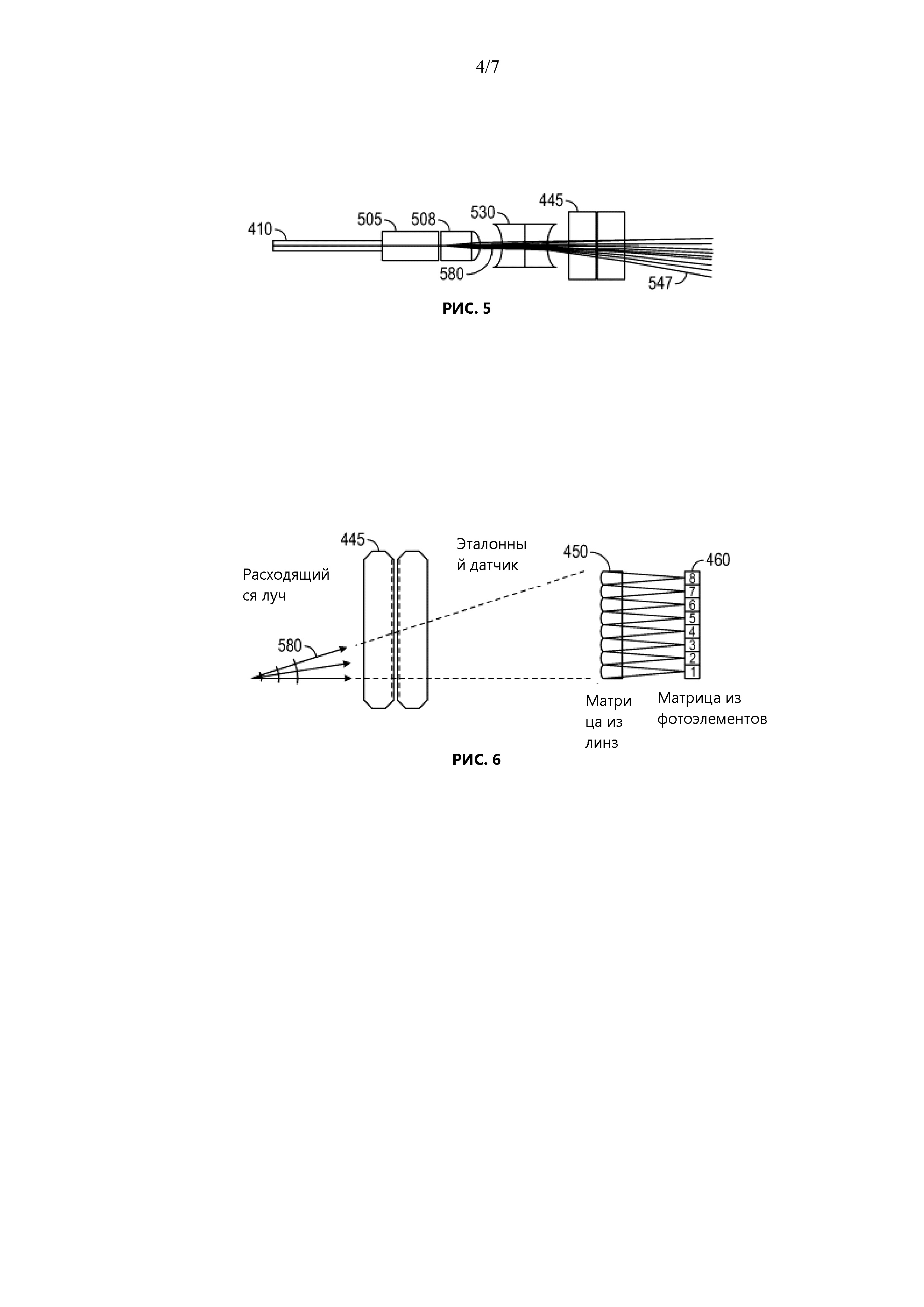
На РИС. 5 представлено схематическое изображение расходящегося луча света, полученного в другом оптическом измерительном устройстве, в соответствии с одним из вариантов осуществления настоящего изобретения.
На РИС. 6 представлено схематическое изображение интерферометра и детекторной матрицы оптического измерительного устройства, в соответствии с одним из вариантов осуществления настоящего изобретения.
На РИС. 7А и 7В представлены другие примеры оптического измерительного преобразователя перемещения с источником света с синхронизированной длиной волны.
На РИС. 8 представлен другой пример оптического измерительного преобразователя перемещения с источником света с синхронизированной длиной волны.
На РИС. 9А и 9В представлен примерный гравиметр с оптическим измерительным устройством с двумя резонаторами Фабри-Перо, в соответствии с настоящим изобретением.
На РИС. 10 представлена блок схема способа оценки исследуемого параметра в буровой скважине, пересекающей формацию, в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройствам и способам оценки исследуемого параметра оптическим измерительным устройством, использующим методы предотвращения изменений в данных, генерируемых в оптическом измерительном устройство, в результате изменений температуры или давления в оптическом измерительном устройстве. Эти способы представляют собой компенсацию изменений в оптическом измерительном устройстве.
Варианты осуществления настоящего изобретения включают в себя оптическое измерительное устройство с двойным резонатором. В традиционных гравиметрах длина резонатора может колебаться в зависимости от температуры, образуя член смещения, который вычисляется при расчетах. При использовании общего элемента, удерживающего отражающие поверхности каждого соответствующего резонатора на противоположных сторонах, данные измерений от двух устройств могут быть соотнесены друг с другом таким образом, что влияние изменений температуры на один резонатор отменяет влияние изменений температуры на другой резонатор. Резонаторы двухрезонаторного гравиметра проектируются равной длины, если усилие на чувствительную массу равно нулю. Таким образом, разница в длинах резонатора, может использоваться в качестве соответствующего члена смещения, который, по существу, может быть сведен к нулю. Элемент может использоваться в качестве чувствительной массы. Некоторые варианты осуществления используют отражение только обоих резонаторов. В этом случае, зеркала, прикрепленные к пружинному механизму чувствительной массы, могут быть зеркалами с высоким значением коэффициента отражения, позволяя увеличить габариты чувствительной массы. Это может повысить чувствительность датчика к перемещению чувствительной массы за счет увеличения добротности обеих резонаторов.
Варианты осуществления настоящего изобретения включают в себя содержание элемента управления источником света (например, контроль эталоном) в тех же окружающих условиях, что и условия оптического измерительного устройства, используемого для замера данных, связанных с исследуемым параметром (например, эталонный датчик). Оптические измерительные преобразователи перемещения используют источник света, который находится на достаточным расстоянии от датчика и подвержен воздействию различного давления и колебаниям температуры. В результате, колебания длины волны, вызванные факторами окружающей среды, взаимно независимы от параметров датчика и выступают в качестве источника шума. Благодаря лазерному источнику света в физических размерах эталона, колебания в основном обусловливаются изменениями в показателе преломления материала между зеркалами эталона и изменениями длины резонатора. Эти изменения могут проявляться в резонаторе измерительного преобразователя перемещения. Критические компоненты кожуха лазерной системы с компонентами измерительного преобразователя перемещения, эталон синхронизации лазерного луча и резонатор датчика находятся в одной и той же среде, так что изменения в показателе преломления и габаритах эталона синхронизации лазерного луча взаимосвязаны с теми же изменениями в резонаторе датчика. В этой конфигурации температурные коэффициенты эталонного лазерного луча сравнимы с температурными коэффициентами датчика, позволяя компенсировать температурную чувствительность датчика.
Настоящее изобретение восприимчиво к различным вариантам осуществления. На чертежах показаны, а в документе подробно описаны конкретные варианты осуществления настоящего изобретения с пониманием того, что данное описание должно рассматриваться как иллюстративное и не предназначенное для ограничения объема данного изобретения.
На РИС. 1 схематически представлен один вариант осуществления настоящего изобретения, где подземный пласт 10 пробурен скважиной 12. Устройство или инструмент 100 подвешен в скважине 12 за нижнюю часть носителя, такого как каротажный кабель 14. Инструмент 100 может включать в себя процессор. Каротажный кабель 14 перекинут через шкив 18, закрепленный на буровой вышке 20. Разматывание и наматывание каротажного кабеля осуществляется механической лебедкой, перевозимой, например, на грузовике 22. Панель управления 24 соединена с инструментом 100 каротажным кабелем 14 и обычными средствами управления передачей электроэнергии, передачей данных / сигналов управления, а также обеспечивающих контроль над работой компонентов в устройстве 100. Использование гибкого носителя для спуска инструмента 100 является лишь примером. Инструмент 100 может спускаться и жестким носителем. В некоторых вариантах осуществления буровая скважина 12 может использоваться для извлечения углеводородов. В других вариантах осуществления буровая скважина 12 может использоваться для геотермальных исследований, добычи воды, угля, строительства туннелей или для других применений.
В вариантах осуществления устройство 100 способно собирать данные об усилии или ускорении. Устройство также способно: (i) активно или пассивно собирать данные о различных характеристиках пласта, (ii) предоставлять данные об ориентации инструмента и направлении движения, (iii) предоставлять данные о характеристиках пластового флюида и/или (iv) давать оценку условиям в продуктивном пласте (например, пластовое давление, давление в стволе скважины, температура и т.д.). Примерные образцы устройства могут включать в себя резистивные датчики (для определения удельного сопротивления пласта, диэлектрической постоянной и наличия или отсутствия углеводородов), акустические датчики (для определения акустической проницаемости пласта и границы пласта в формации), радиоизотопные датчики (для определения плотности пласта, радиоизотопной проницаемости и некоторых свойств горных пород), зонды ядерно-магнитного каротажа (для определения пористости и других петрофизических характеристик пласта) и гравиметры/гравитационные градиентометры (для оценки плотности пласта). Другие примерные устройства могут представлять собой гироскопы, магнитометры, акселерометры и датчики, осуществляющие отбор проб пластового флюида и определяющие физические и химические свойства пластового флюида.
Устройство 100 опускается до места расположения средств связи или в место вблизи исследуемого параметра. В некоторых вариантах осуществления устройство 100 опускается в буровую скважину 12. Исследуемый параметр может представлять собой, но не ограничиваясь: (i) давление, (ii) усилие и (iii) ускорение. В зависимости от принципа работы устройства 100, устройство 100 способно работать под поверхностью и условиях скважины. Температура окружающей среды в буровой скважине может превышать 120 градусов по Цельсию (248 градусов по Фаренгейту). В других вариантах осуществления устройство 100 может использоваться на поверхности 160.
Устройство 100 включает в себя оптический измерительный преобразователь перемещения в соответствии с вариантами осуществления настоящего изобретения. Оптические измерительные преобразователи перемещения работают за счет обнаружения света, отраженного оптическим элементом, который меняет свою отражающую способность в результате смещения (например, изменения в положении в течение времени) элемента в ответ на сигнал возбуждения, обусловленный окружающими условиями, такими как перепад давлений, звук, вибрация, и т.д. Обнаруженный свет может быть преобразован в электрический сигнал. Этот сигнал представляет собой функцию отражательной способности оптического элемента, и, следовательно, функцию сигнала возбуждения. Оптический измерительный преобразователь перемещения может включать в себя оптический интерферометр.
Доказано, что оптические интерферометры обладают высоким разрешением при использовании их в качестве детекторов перемещения в физических устройствах зондирования, таких как акустические датчики, датчики давления и акселерометры. Одним примером оптического интерферометра является интерферометр Фабри-Перо, который также известен как эталон. Эталон включает в себя оптический резонатор, разделяющий световую энергию входного светового сигнала на отраженный сигнал и переданный сигнал. Соотношение световой энергии в отраженных и переданных сигналах зависит от длины оптического резонатора, представляющего собой расстояние между его двумя, по существу, параллельными и частично отражающими поверхностями и его рабочей длины волны х, (то есть, длина волны х, света, на которой работает интерферометр).
В эталоне свет подвергается модуляции очень малыми изменениями длины волны резонатора и эти изменения обнаруживаются стандартными способами оптического обнаружения, проявляя себя в широком динамическом диапазоне. Использование светового луча для считывания данных сильно отличается от стандартных подходов, которые используют заряженные частицы, включая электростатические, емкостные, пьезоэлектрические, или пьезорезистивные способы. Все эти технологии требуют наличия сверхкритической связи между конструкцией преобразователя и механической конструкцией датчика. Это накладывает ограничения на датчик, которые отрицательно влияют на характеристику, особенно при уменьшении размера. Измерительный преобразователь перемещения на основе эталона с высоким динамическим диапазоном и высокой чувствительностью обладает значительными преимуществами в области физического контроля, включая уменьшение размеров оптического интерферометра и отсутствие отрицательного воздействия на поляризационно-интерференционный измерительный преобразователь. Эта независимость между эталоном и поляризационно-интерференционным измерительным преобразователем помогает устранить перекрестные связи в конструкции измерительного преобразователя и конструкции датчика.
Эталон может быть сконфигурирован таким образом, чтобы одна поверхность эталона, функционально соединенная с поверхностью подвижного элемента, или расположенная на нем, была чувствительна к сигналу возбуждения усилия или ускорения. При смещении элемента в ответ на сигнал возбуждения, длина резонатора изменяется и, следовательно, меняется соотношение световой энергии в отраженных и переданных сигналах. В результате, электрический выходной сигнал, образованный одним из отраженных и переданных сигналов, является функцией сигнала возбуждения, падающего на эталон.
Основной принцип функционирования предполагает создание оптического канала, длина которого изменяется при воздействии внешнего сигнала возбуждения, такого как давление или ускорение. В целом эталон может использоваться при проектировании данных типов измерительных преобразователей. Данный тип интерферометра может иметь два параллельных диэлектрических зеркала, образующих полый резонатор. Свет, падающий на резонатор, частично передается в соответствии с формулой:

F (добротность) определяется отражающей способностью двух зеркал,

где R0 представляет собой отражающую способность зеркал. При этом предполагается, что величины отражающей способности двух зеркал равны. Выражение представляет собой фазу с длиной волны

Типичный отклик представлен на Рис. 2, где переданная волна 210 отражается как отраженная волна 220. Скорость изменения оптического сигнала может составлять несколько процентов на один нанометр смещения. Оптический сигнал может расщепляться до уровня 100 частей на миллиард (част/млрд.) и ниже, что приравнивается к способности измерительного преобразователя обнаруживать фемтометровый масштаб изменений в смещении одного зеркала относительно другого зеркала. Тем не менее, чувствительность измерительного преобразователя может оставаться очень низкой на протяжении большей части типичных рабочих точек, что видно на кривых 210 и 220. Чувствительность измерительного преобразователя пропорциональна абсолютному значению наклона кривых 210 и 220. Следует отметить, что наклон и чувствительность могут быть очень низкими, если зазор d находится в интервале примерно от 60,2 микрометра до 60,4 микрометра, а наклон может быть выше, если зазор находится в интервале примерно от 60,4 микрометра и 60,6 микрометра.
Датчик с высоким разрешением требует, чтобы длина оптического резонатора допускала изменение при разных длинах волн. Одним из способов поддержания чувствительности в широком диапазоне длин резонатора является использование нескольких световых лучей, когда каждый луч имеет различный отклик на изменения длины резонатора. Несколько световых лучей могут создавать различные отклики, имеющие различные длины волн, различные углы падения или их комбинацию.
На Рис. 3 представлена диаграмма кривых, представляющих несколько световых лучей с примерным набором различных углов падения. В этом примере, углы падения лежат в интервале от 1,00 градуса для кривой 310 и до 7,00 градусов для кривой 320. Данный интервал углов является только иллюстративным, но могут быть использованы другие интервалы углов, что очевидно специалисту в отрасли техники, к которой относится данное изобретение. Из анализа этих кривых следует, что чувствительностью к определенной длине резонатора обладает более чем один луч. Данные лучи получают с использованием методов, известных специалистам в отрасли техники, к которой относится данное изобретение, в том числе, но не ограничиваясь: (i), направлением нескольких световых лучей в направлении одинарной линзы, способной работать в режиме деления и (ii) направлением нескольких световых лучей в сторону элементарной линзы многопучковой системы, соответствующей каждому из нескольких световых лучей.
На Рис. 4 представлена схема одного варианта осуществления в соответствии с настоящим изобретением. Коллимированный и/или поляризованный когерентный световой луч 410 разделяется светоделителем 415 для генерации опорного сигнала 420. Цилиндрическая конденсорная линза 430 рассеивает луч 410 на расходящиеся пучки 480 в дальней зоне. Входное отклоняемое зеркало 440 устанавливает средний угол падения через эталон 445. В некоторых вариантах осуществления средний угол находится в интервале примерно от 0 градусов до примерно градусов, где:
; (3)
= ширина луча;
; а
= отражательной способности поверхностей эталона
Любому специалисту в отрасли техники, к которой относится данное изобретение понятно, что средний угол может находиться в интервале примерно от 0° до угла такой величины, который приводит к ослаблению интенсивности светового луча до такой степени, что он прекращает интерферировать. Световые лучи 480, каждый со своим углом падения, могут частично передаваться через эталон 445 и быть коллимированы до попадания на детекторную матрицу 460 коллиматорной линзой 450. Число углов падения световых лучей меняется в зависимости от добротности эталона 445. Добротность представляет собой параметр, характеризующий оптический резонатор и зависит от отражательной способности зеркальных поверхностей эталона 445 и определяется здесь уравнением (2). Как правило, более высокая отражательная способность является результатом более высокой степени добротности и большего числа углов падения световых лучей, которые могут потребоваться в эталоне 445. Детекторная матрица 460 включает в себя два или более светочувствительных детектора, например фотодиоды. В данном варианте осуществления, детекторная матрица 460 включает в себя девять (9) детекторов с размером пятна каждого детектора примерно в 10 микрометров, а их пространственное разнесение составляет примерно 575 микрометров. Расположение детекторов в детекторной матрице 460 может быть линейным. Детекторная матрица 460 может включать в себя, по меньшей мере, по одному детектору на каждый световой луч 480. Детекторная матрица 460 способна генерировать электрические сигналы в ответ на принятую энергию световых лучей 480. Коллиматорная линза 450 представляет собой матрицу из нескольких линз. Конденсорная линза 470 способная фокусировать световой луч 410 на опорном детекторе 490. Световой луч 410 может иметь любую длину волны (т.е. быть инфракрасным, видимым, ультрафиолетовым и т.д.) пока соответствующие линзы, детекторы и эталон настроены и/или способны на соответствующую ответную реакцию при использованной длине волны. В некоторых вариантах осуществления, второй световой луч (не показан) с другой длиной волны светового луча 410 может быть использован наряду со световым лучом 410.
На РИС. 5 и 6 представлена схема другого варианта осуществления в соответствии с настоящим изобретением. На нем когерентный луч света 410 проходит через коллиматорную линзу 505 и поляризатор 508 в линзу 530, которая преобразует входящий луч 410 в лучи 580. Линза 530 способна вызывать расхождение или схождение входящего луча 410. Лучи 580 падают на эталон 445, где часть каждого из лучей 547, передается на решетку из линз 450. Линза 530 показана в виде пары вогнутых цилиндрических линз, но только в качестве примера и только иллюстративно, поскольку линза 530 может представлять собой одинарную вогнутую линзу, одинарную выпуклую линзу или пару выпуклых линз. Лучи 580 могут быть расходящимися или сходящимися. Решетка из линз 450 фокусирует лучи на детекторной матрице 460. В некоторых вариантах осуществления одинарная линза (не показана) может использоваться в дополнение или вместо решетки из линз 450. В некоторых вариантах осуществления оптическая решетка (не показана) может использоваться в дополнение или вместо линзы 530. Детекторная матрица 460 способна генерировать электрические сигналы в ответ на принятую энергию световых лучей 580. Хотя опорный луч здесь не показан, но он может быть использован для увеличения чувствительности в некоторых вариантах применения. Опорный луч может использоваться для нейтрализации шума, вызванного изменениями в интенсивности входного светового луча 410. Использование опорного луча определяется специалистами в отрасли техники, к которой относится данное изобретение.
В других вариантах осуществления когерентный световой луч от волоконно-оптического источника может рассеиваться естественным путем, формируя расходящиеся лучи, которые проходят через эталон к специальной линзе, включающей, например, внеосевые зоны Френеля, способные передавать энергию падающего светового луча от каждой кольцеобразной зоны и направлять ее в отдельный детектор или детекторную матрицу. Детекторная матрица может включать в себя, по меньшей мере, два детектора (образуя линейную матрицу) чувствительных к электромагнитной энергии и генерирующих электрические сигналы в ответ на принятую энергию световых лучей. В некоторых примерах матрица представляет собой двумерную матрицу, включающую в себя полупроводниковый приемник света (ПЗС-матрица), по типу используемых в цифровых камерах.
На РИС. 7А и 7В представлены другие примеры оптического измерительного преобразователя перемещения с источником света с синхронизированной длиной волны. Оптическое измерительное устройство 700 (Рис. 7А) включает в себя источник света 702, длина волны которого, контролируется оптическим компонентом управления. Например, устройство 700 может использовать устройство управления источником света с обратной связью, синхронизируя источник света с длиной волны эталона высокой добротности, управляемого сигналом датчика температуры. На Рис. 7А показан модуль источника света. На Рис. 7В показан сенсорный модуль. Оптический измерительный преобразователь перемещения включает в себя источник света и датчик в виде отдельных модулей, соединенных оптоволоконным кабелем, сохраняющим поляризацию и передающим свет в сенсорный модуль. Каждый модуль содержит интерферометр, такой как эталон. Эталон в модуле источника света (Рис. 7А) используется для синхронизации длины волны лазерного диода со своей длиной волны и подачи на датчик (Рис. 7В) света с постоянной длиной волны. Эталон реагирует на воздействие внешних усилий перемещением одного или обоих своих зеркал.
Со ссылкой на Рис. 7А, модуль 700 источника света содержит в свободном пространстве ряд оптических компонентов, включающих в себя лазерный диод 702, изолятор и устройство управления источником света с обратной связью. Устройство управления источником света с обратной связью включает в себя оптический компонент управления (синхронизирующий эталон 720), один или несколько детекторов (фотодиод 710'), оптически связанных с оптическим компонентом управления, и управляющую электронику (модуль 712 управления лазером), функционально соединенных, по меньшей мере, с одним детектором и лазерным диодом 702. Модуль 700 источника света также включает в себя термоэлектрический охладитель ("ТЭО") 716, регулирующий температуру лазерного диода 702.
Модуль 700 источника света настроен так, что выходной электромагнитный луч ("свет") поступает в оптоволоконный кабель, который, в свою очередь, соединен со светоделителем. Светоделитель способен передавать часть (например, 90 процентов) света на сенсорный модуль 701, а другую часть (10 процентов) на синхронизирующий эталон 720. Свет, внутри термически контролируемой среды 708, распространяется в свободном пространстве в/из/через синхронизирующий эталон 720. Синхронизирующий эталон 720 герметичен и слегка наклонен, сводя к минимуму проблемы, возникающие в связи с паразитным и нежелательным отражением.
Специалистам в отрасли техники, к которой относится данное изобретение, очевидно, что синхронизирующий эталон может быть заменен на газонаполненный элемент, содержащий газ со структурой полос поглощения, находящихся в пределах длины волны, требуемой датчику. В этом случае лазер синхронизируется с длиной волны полосы поглощения. Газ, который обычно используется для длин волн примерно в 1550 нм, представляет собой метан. В этом случае лазер синхронизируется с одной из вращательных структур полос поглощения молекулы метана. Специалисты в отрасли техники, к которой относится данное изобретение, могут выбирать различные газы для разных длин волн. Тем не менее, использование газонаполненного элемента не компенсирует тепловое воздействие и воздействие коэффициента отражения внутри эталонного датчика.
На Рис. 7В представлен оптический измерительный преобразователь перемещения 701, который может быть реализован в соответствии с различными вариантами осуществления, описанными в данном документе, или использовать различные комбинации элементов и их компонентов. Свет от лазера поступает через оптоволоконный кабель, а затем распространяется в свободном пространстве внутри датчика, содержащего среду с контролируемой температурой.
Как показано на Рис. 7В, оптический измерительный преобразователь перемещения 701 включает в себя оптику 703 датчика, детекторы 707 и оптическое измерительное устройство (эталонный датчик 705). Эталонный датчик (или измерительный эталон) 705 способен оценивать исследуемый параметр. Оптика датчика 703 делит луч на опорный луч и луч, подаваемый в резонатор эталона 705. Оптика способна посылать опорный луч на фотодиод, образуя опорную интенсивность.
На рисунке луч проходит в резонатор с фокальной точки, удаленной от резонатора. Одинаково хорошо он мог быть направлен в резонатор с фокальной точки, находящейся в центре резонатора. После выхода луча из резонатора его восемь частей собираются и фокусируются на матрице датчиков, например, фотодиодах 707. Отклик от фотодиодов 707 принимается вместе с опорным сигналом электронным блоком 709, который может включать в себя один или несколько процессоров. Там он обрабатывается, получая на выходе значение оптической фазы каждого луча, как описано выше.
Эталон в лазере и эталон в резонаторе может находиться в отдельных герметичных корпусах и настраиваться на отдельные температуры. Оптоволоконный кабель между двумя модулями может занимать значительное расстояние, отделяющее модули.
Возвращаясь к Рис. 7A, во время работы модуль 712 управления лазером синхронизирует длину волны источника света 702 с длиной волны эталона высокой добротности, управляемого сигналом датчика температуры. Коэффициент отражения меняется из-за атмосферных изменений, а также от температуры и состава газа. Температура контролируется, ограничивая тепловые изменения в габаритных размерах.
Фотодиоды 710, 710', быстро реагирующие на принятый световой луч, передают сигналы с информацией, указывающей на соответствующий световой луч, принятый модулем 712 управления лазером. Таким образом, фотодиоды 710, 710′ совместно с модулем 712 управления лазером измеряют количество отраженного (R) и переданного (T) света. Разность (R - Т) используется для синхронизации длины волны лазерного диода в сторону интерференционной полосы эталона. Например, длина волны может составлять около 1550 нм.
Синхронизация происходит путем обнаружения света, отражающегося и проходящего через эталон. Переданный свет описывается формулой:
(4)
где I0 представляет собой интенсивность переданного света; F представляет собой коэффициент добротности резонатора; а δ – оптическую фазу света в резонаторе. Оптическая фаза равна:
(5)
где vFSR,L представляет собой свободный спектральный диапазон резонатора; c представляет собой скорость света; dL представляет собой длину резонатора; nL представляет собой показатель преломления среды в резонаторе; а θL представляет собой угол падения светового луча в резонатор. Полагая идеальный резонатор, отраженный свет описывается формулой:
(6)
Для синхронизации длины волны подается небольшой ток смещения, который пропорционален R-T. Это равняется синхронизации при T = R = ½. В этом случае оптическая фаза должна удовлетворять выражению:
(7)
Длина волны стабильного источника света и частота должна удовлетворять выражению:
(8)
Применение знака ± знак зависит от синхронизируемой стороны интерференционной полосы источника света. Здесь m представляет собой целое число, равное примерно 7740 для 6 мм резонатора и номинальной длине волны в 1550 нм. Для коэффициента добротности, равного 100, арксинус равен примерно 0,1. Важным моментом является то, что частота синхронизированного лазера пропорциональна свободному спектральному диапазону резонатора. Это означает, что она также пропорциональна показателю преломления среды в резонаторе и его длине.
Датчик принимает входящий свет от источника света. Входящий свет проходит через эталон, где одно из зеркал прикреплено к чувствительной массе и пружине, позволяя измерять переданный свет. Предполагая идеальное измерение света (игнорируя на время использование опорного луча, чтобы исключить относительную интенсивность шума из данных измерения), полученный сигнал, задается уравнением (4), но свободный спектральный диапазон зависит от резонатора.
Переданный сигнал из любого заданного канала датчика затем описывается формулой:
(9)
где S представляет собой сигнал; IC0– интенсивность падающего излучения; FC – добротность резонатора, а δC – оптическую фазу светового луча через резонатор. Оптическая фаза описывается формулой:
(10)
Здесь подстрочный индекс C означает переменные, связанные с резонатором, а xC представляет собой длину резонатора при нулевом усилии на чувствительную массу. Чувствительная масса смещается на расстояние x под действием силы тяжести. Очевидно:
(11)
где m представляет собой вес чувствительной массы и пружины в сборе; g представляет собой ускорение свободного падения; а k – модуль упругости пружины. Подставляя частоту светового луча от синхронизированного источника света, получаем:
(12)
Подставляя выражения для свободного спектрального диапазона лазера и свободного спектрального диапазона резонатора, находим:
(13)
Применение знака ± зависит от ориентации резонатора по отношению к силе тяжести. Все параметры этого уравнения (за исключением α) могут зависеть от температуры.
Перемещение чувствительной массы зависит от силы тяжести и модуля упругости пружины. Модуль упругости пружины зависит от механических размеров пружины и ее констант упругости. Термические константы габаритных размеров и константы упругости создают эффект противодействия и уравновешивают действие друг друга. Если колебания температуры достаточно малы, а материал пружины выбран должным образом, то температурный коэффициент смещения близок к нулю. Как правило, температурный коэффициент будет доминировать над температурным коэффициентом констант упругости, составляя порядка сотен долей на миллион. Предполагается, что коэффициент составляет несколько долей на миллион.
Приближенное выражение для показателя преломления воздуха равно:
(14)
HR представляет собой относительную влажность в процентах, а T′ – температуру по стоградусной шкале. Первый член представляет собой уравнение состояния идеального газа, введенное в выражение для показателя преломления в зависимости от плотности. При типичных условиях окружающей среды, первый член примерно равен 2,7 x 10-4. Или, упрощая:
(15)
Поскольку эталоны для оптического компонента управления синхронизированным источника света и для оптического измерительного преобразователя перемещения (например, эталонного лазера) герметизированы по отдельности, то эталоны для источника света и резонатора находятся в разных герметичных средах.
Плотность газа в объеме определяется общим числом молекул N#, поделенных на объем V. Таким образом, имеем
(16)
Это выражение сводится к нулю, поскольку N# постоянная величина. Таким образом:
(17)
где подстрочный индекс 0 относится к объему T0, а CTE представляет собой линейный коэффициент термического расширения. Таким образом, плотность описывается формулой:
(18)
а показатель преломления описывается формулой:
(19)
Таким образом, вычисляя это выражение для резонатора с комнатной температурой, давлением газа в комнате и алюминиевого контейнера, получаем:
(20)
Таким образом, регулируя температуру менее чем на 0,5 градуса (а CTE корпуса составляет менее десяти частей на миллион) можно использовать отдельный герметичный корпус для лазера и датчика с приемлемыми результатами, что оказывает влияние на показатель преломления. Тем не менее, угол световых лучей, попадающих в резонатор мал, и составляет менее 10-15 градусов, что оказывает влияние на угловую стабильность. Используя разложение Тейлора для температуры, имеем:
(21)
В данном случае, CTможет составлять 5-15 ч.млн, а угол менее 0,2 радиан. Таким образом, приемлемые результаты получают, если температура поддерживается в пределах 1 милликельвина.
Тем не менее, из-за разницы в среде между сенсорным модулем и модулем источника света, достижение требуемой степени точности, становится проблематичным. Итерируя уравнение (10), получаем:
(22)
Подставляя температурные коэффициенты и сохраняя только линейные члены, имеем:
(23)
где подстрочный индекс 0 относится к значению средней температуры каждого эталона. Принимая во внимание вывод из раздела о коэффициенте отражения температурными коэффициентами можно пренебречь:
(24)
Проверяя, снижаем погрешность, связанную с колебаниями температуры:
(25)
Таким образом, погрешности в лазере накладываются на погрешности в датчике, так как колебания температуры в каждом модуле взаимно независимы.
На Рис.8 представлен другой пример оптического измерительного преобразователя перемещения с источником света с синхронизированной длиной волны. Оптический измерительный преобразователь перемещения включает в себя оптическое измерительное устройство для измерения исследуемого параметра и устройство управления источником света с обратной связью, включая оптический компонент в оптическом измерительном устройстве. Устройство управления источником света с обратной связью способно компенсировать изменения температуры в оптическом измерительном устройстве путем настройки, по меньшей мере, одного источника света.
На Рис. 8, устройства, чувствительные к температуре и давлению (например, синхронизирующий эталон и эталонный датчик), лазерной системы и датчик объединены в моноблок 830. Это означает, что температура эталонного лазера и эталонного датчика равны, как равны их давление газа и газовый состав. Кроме того, любые колебания свойств резонаторов взаимосвязаны. Корпус 830 может быть герметичен. В некоторых вариантах осуществления, компоненты сконфигурированы для передачи луча в свободном пространстве. Таким образом, использование оптоволоконного кабеля, сохраняющего поляризацию, может быть исключено, что позволяет избежать колебаний поляризации лазерного излучения, присущих оптоволокну.
Оптическое измерительное устройство 800 содержит ряд оптических компонентов, включая лазерный диод 802 и устройство управления источником света с обратной связью. Устройство управления источником света с обратной связью включает в себя оптический компонент управления (синхронизирующий эталон 820), один или несколько детекторов (фотодиод 810'), оптически связанных с оптическим компонентом управления, и управляющую электронику (модуль 812 управления лазером), функционально соединенных, по меньшей мере, с одним детектором и лазерным диодом 802. Оптическое измерительное устройство 800 также включает в себя термоэлектрический охладитель ("ТЭО") 816, регулирующий температуру лазерного диода 802. Оптический измерительный преобразователь перемещения 800 далее включает в себя оптику 803 датчика, детекторы 807 и оптическое измерительное устройство (эталонный датчик 805).
Температура резонатора и температуры эталонного синхронизирующего лазера могут быть одинаковы для оптического измерительного устройства 800.
(26)
Резонатор и эталонный лазер изготовляются из материалов с одинаковыми свойствами, что уравнивает их коэффициенты теплового расширения, кроме отличий, обусловленных процессом производства (различные партии). То есть, оптическая фаза сигналов датчиков не зависит от теплового расширения, как эталонного лазера, так и резонатора при условии, что коэффициенты теплового расширения совпадают. Таким образом:
(27)
Это устраняет погрешность, вызванную тепловыми флуктуациями в длине эталонного лазера и длинах резонатора. Кроме того, если температурный коэффициент эталона совпадает с температурным коэффициентом пружины, то имеет место дальнейшее снижение чувствительности устройства к температуре. Оптические фазы сигналов датчика не зависят от температурного коэффициента модуля упругости пружины в сборе с чувствительной массой. В любом случае, нет необходимости в сохранении длины волны лазера в течение длительного времени. В идеальном случае, вышеприведенное уравнение сводится:
(28)
и погрешность зависит только от колебаний одной температуры (например, температуры эталонного датчика).
На РИС. 9А и 9В представлен примерный гравиметр с оптическим измерительным устройством с двумя резонаторами Фабри-Перо, в соответствии с настоящим изобретением. Со ссылкой на Рис. 9А, оптическое измерительное устройство 900 способно принимать, по меньшей мере, один электромагнитный луч 902 и включает в себя: первую отражающую поверхность 904; вторую отражающую поверхность 906; третью отражающую поверхность 908; и четвертую отражающую поверхность 910. Третья отражающая поверхность 908 может быть неподвижно закреплена относительно второй отражающей поверхности 906, а четвертая отражающая поверхность 910 может быть неподвижно закреплена относительно первой отражающей поверхности 904.
Нижний оптический резонатор образуется третьей отражающей поверхностью 908 и четвертой отражающей поверхностью 910. Третья отражающая поверхность 908 может крепиться к раме 920 пружиной 922, имеющей модуль упругости k. Верхний оптический резонатор образуется первой отражающей поверхностью 904 и второй отражающей поверхностью 906. Вторая отражающая поверхность 906 может также крепиться к раме 920 пружиной 922, имеющей модуль упругости k. Вторая и третья отражающие поверхности выполняются в виде двустороннего зеркала 907 путем нанесения покрытия на противоположные стороны твердого элемента. Твердый элемент может функционировать в качестве чувствительной массы. Такая конфигурация влияет на первый переменной зазор между первой отражающей поверхностью и второй отражающей поверхностью и второй переменный зазор между третьей отражающей поверхностью и четвертой отражающей поверхностью.
Предположив, что выходной сигнал одинаковых датчиков может быть в целом выражен как:
s = agz + b (29)
где s представляет собой выходной сигнал, gz является составляющей силы тяжести, действующей перпендикулярно к оси измерения датчика, а b представляет собой линейные константы датчика, зависящие от времени и температуры. В оптическом измерительном устройстве 900, где два датчика не параллельны друг другу, выходной сигнал датчиков выражается соответственно как:
s′ = a′gz + b′, а
s = - agz + b (30)
В случае одинаковых датчиков, линейные константы одинаковы:
s′ - s = 2agz, а
s′ + s = 2b. (31)
Таким образом, дифференциальный сигнал имеет нулевое смещение, а суммарный сигнал лишь в два раза превышает значение каждого смещения датчика. В случае с оптическим датчиком и после достаточной обработки сигнала, полученный сигнал представляет собой длину волны резонатора Фабри-Перо. Двустороннее зеркало 907 осуществляет отклонение, когда приложено усилие х, задаваемое:
kx = mgz(32)
где m масса пружинной системы/двустороннего зеркала. Если длина резонатора равна x0 с приложением нулевого усилия, то сигнал, измеренный системой равен:
s = x0 – x = x0 – (m/k) g. (33)
Возвращаясь к уравнению (29), определяем:
a = – (m/k); b = x0. (34)
Свет, отраженный между первой и второй отражающими поверхностями, описывается сходным образом, поскольку второй резонатор реагирует идентично первому резонатору за исключением того, что перемещение зеркала происходит в противоположном направлении. Таким образом, мы имеем
s′ = x′0 + x = x′0 + (m/k) g. (35)
Резонаторы имеют разные длины. Тем не менее, константа для линейного члена идентична для второго резонатора. Таким образом, сумма сигналов и разница выражается как:
s′ - s = 2(m/k) gz + (x′0 - x0), а
s′ + s = 2(x′0 + x0). (36)
Преобразуя уравнение (36) находим величину составляющей силы тяжести:
(37)
Здесь α и β используются в качестве коэффициентов формулы оценки силы тяжести. Эквивалентными уравнениями для нижнего и верхнего резонаторов соответственно являются:
ĝz = ω02s + ω02x0 = αs + β;
ĝz = ω02s′ + ω02x0′ = -α′s′ + β′. (38)
При сравнении базовых членов смещения (β) в уравнениях (37) и (38), очевидно, что член смещения для дифференциального измерения в принципе равен нулю, делая начальные длины двух резонаторов равными, аппроксимируя, таким образом, нулевую длину пружины. На практике этот член может быть сведен к допускам производства по длинам резонатора.
При использовании современной технологии устройство способно поддерживать постоянную эталонную температуру в пределах ± 1 мК и допуск резонатора в пределах 25 микрометров. Тем не менее, двойные резонаторы могут проектироваться с равной длиной при нулевой силе тяжести на чувствительной массе, что дает минимальное значение смещения, которое ограничено только производственным допуском. Для двойных резонаторов, разность в длинах резонатора (и, таким образом, соответствующий член смещения) может составлять приблизительно 10 нанометров или менее. Таким образом, данный способ понижает член смещения на коэффициент 10-4 по сравнению с одним резонатором в 100 микрометров. Кроме того, если проставки для каждого резонатора изготавливались из материала одной партии, то тепловое расширение каждого из них может отличаться только на 1 процент (δεx0≈ 0.01 εx0).
Более того, член смещения в уравнении (37) намного меньше, чем в уравнении (38), так как допуск, как правило, значительно меньше, чем фактический размер. Если t представляет собой допуск, то член смещения может быть сокращен:
βd/ β= t/ x0. (39)
Температурная зависимость линейного члена зависит от модуля упругости пружины k и теплового расширения резонаторов. Изменение сдвига выражается:
δβd/ δT = βd(εY + εL + εx0) + (ω02x0′ /2) δεx0, (40)
где ε представляет собой температурный коэффициент, а подстрочный индекс указывает соответствующее свойство. Подстрочный индекс Y представляет собой модуль Юнга, L – длину пружины, а x0 – длину резонатора. Первый член представляет собой регулярное выражение температурной зависимости члена смещения и равен результатам отдельного измерения. Второй член указывает на то, что коэффициенты расширения длины резонатора не могут быть одинаковыми. При сравнении с тепловой зависимостью одного резонатора, находим:
δβd/ δT ≈ β << δβ/ δT. (41)
Тепловая зависимость коэффициента пропорциональности равна:
δαd/ δT = αd(εY + εL), (42)
и тождественна одинарному резонатору. Температурный коэффициент модуля Юнга для многих материалов равен -100 частей на миллион, в то время как коэффициент теплового расширения составляет порядка нескольких частей на миллион. Однако, существует ряд материалов, для которых уравнение (42) стремится к нулю. Два из них имеют коэффициенты теплового расширения в пределах от 4,5 до 6,5 частей на миллион и 8,0 частей на миллион в интервале от комнатной температуры до 300°С. Для них, чтобы удовлетворять уравнению (42), температурный коэффициент модуля Юнга имеет тот же порядок, но отрицателен. Если уравнение (42) равно нулю, то:
δβd/ δT = βdεx0 + (ω02x0′ /2) δεx0. (43)
Для номинальной длины резонатора в 100 мкм, температурный коэффициент для оценки силы тяжести равен:

Для одностороннего датчика с номинальной длиной резонатора в 100 мкм, умножаем на 4 и получаем σĝz ≈ 0,1 uGal. Дальнейшее улучшение достигается использованием стеклянной керамики или других материалов с низким коэффициентом теплового расширения.
Если предположить, что ось измерения дифференциального датчика параллельна силе тяжести (ориентация «вверх» ), а поворот датчика на 180 градусов вокруг оси, перпендикулярен оси измерения в положении "вниз", то:
∆s+ = (s′ - s)+= 2ω0-2g + ∆x0, а
∆s- = (s′ - s)-= -2ω0-2g + ∆x0, (45)
Тогда:
∆s+- ∆s-= -4ω0-2g; а
∆s++∆s-= 2∆x0. (46)
В сочетании с суммой сигналов, уравнение можно решить для начальных длин двух резонаторов:

Вычисляем длины резонаторов:

В некоторых вариантах осуществления, представляется возможным дополнительно приложить небольшое ускорение к раме с частотой ниже резонансной частоты чувствительной массы в сборе с пружиной, например, с помощью исполнительного механизма (механического, пьезоэлектрического, магнитного и т.д.). Ускорение может быть смоделировано как:
a(t) = a0 cos ωt; ω << ω0(49)
Тогда, кроме возможности большой составляющей силы яжести имеем небольшую амплитуду сигнала. При минимальных и максимальных амплитудах слабого сигнала, имеем:
∆s+a = 2ω0-2(gz+ a0) + ∆x0, а
∆s-a = 2ω0-2g (gz- a0) + ∆x0. (50)
Тогда:
∆s+a- ∆s-a= -4ω0-2 a0. (51)
Таким образом, при калибровке двойных резонаторов, получаем значительно меньший член смещения в отношении обычных оптических измерительных устройств.
На Рис. 9В представлен другой гравиметр с оптическим измерительным устройством с двумя резонаторами Фабри-Перо, в соответствии с настоящим изобретением. Оптическое измерительное устройство 901 способно принимать, по меньшей мере, один отдельный соответствующий электромагнитный луч 951, 951’ каждым резонатором 990, 992. Каждый резонатор 990, 992 способен выводить отдельный соответствующий электромагнитный луч (953, 953'), без использования прозрачного или полупрозрачного зеркала, встроенного в чувствительную массу 994. Таким образом, двустороннее зеркало может быть непрозрачным. В одном примере, центральный элемент изготавливается из вольфрама или другого материала схожей плотности. Вес чувствительной массы, таким образом, может быть значительно больше (без изменения габаритных размеров), чем в варианте осуществления согласно Рис. 9A, что дает большую точность гравитационных измерений. Тем не менее, использование отдельных входных и выходных сигналов для каждого резонатора увеличивает сложность конструкции и требует дополнительного места, что делает выбор между вариантами осуществления на Рис. 9А и Рис. 9В специальным и зависит от целого ряда конструктивных соображений.
Входные лучи 951, 951’ и выходные лучи 953, 953' конфигурируются за счет входных световых компонент 950, 956 (которые представляют собой источники света, промежуточную оптику или оптоволоконный кабель) и выходных световых компонент детектирования (которые представляют собой световые датчики, промежуточную оптику или оптоволоконный кабель) и связанных с ними оптических компонентов 960-974.
На Рис.10 представлена блок схема способа 1000 оценки исследуемого параметра в буровой скважине, пересекающей формацию, в соответствии с настоящим изобретением. Способ 1000 включает в себя использование устройств 100, 800, 900, 901 и так далее. На этапе 1010 оптическое измерительное устройство опускается в буровую скважину 12. Например, оптическое измерительное устройство опускается транспортирующим устройством (или носителем) 14. Оптическое измерительное устройство может встраиваться в качестве инструмента в каротажный зонд.
На этапе 1020 оптическое измерительное устройство используется для генерации данных, относящихся к относительному перемещению исследуемого параметра между двумя или несколькими отражающими поверхностями оптического измерительного устройства. Например, несколько световых лучей 880 передаются в эталон 445 и частично передаются от эталона 445 в детекторную матрицу 860. Внешний сигнал возбуждения (например, усилие или ускорение) вызывает перемещение одной из зеркальных поверхностей эталона 445, что изменяет длину резонатора эталона 445. Благодаря частично переданным световым лучам, электрические сигналы, генерированные детекторной матрицей 860, изменяются в результате изменения длины резонатора эталона 445. Сигналы несут (передают) данные. Внешний сигнал возбуждения определяется исходя из изменения в электрических сигналах, генерируемых детекторной матрицей 860. В некоторых вариантах осуществления, для оценки внешнего сигнала возбуждения используется опорный сигнал, генерированный опорным детектором. В некоторых вариантах осуществления этап 1020 осуществляется одним световым лучом, который перемещается под разными углами падения в течение определенного периода времени с последовательным получением генерированных электрических сигналов.
На этапе 1030, способ включает в себя предотвращение изменений в данных, в результате изменений в оптическом измерительном устройстве из-за: (i) температуры или (ii) давления, путем компенсации изменений в оптическом измерительном устройстве. Компенсация осуществляется корректировкой, по меньшей мере, одного источника света, генерирующего электромагнитный луч, по меньшей мере, частично, принятого оптическим измерительным устройством в ответ на корректирующие данные, относящиеся к управлению оптическим измерительным устройством (т.е. синхронизирующим эталоном 720). Например, корректировка, по меньшей мере, одного источника света может осуществляться, по меньшей мере, одним детектором, оптически связанным с управлением оптическим измерительным устройством и управляющей электроникой, функционально связанной, по меньшей мере, с одним детектором и, по меньшей мере, одним источника света и способной осуществлять управление с обратной связью, по меньшей мере, одним источником света, используя данные, по меньшей мере, от одного детектора. Кроме того, компенсация может осуществляться за счет использования оптического измерительного преобразователя перемещения, содержащего: первую отражающую поверхность; вторую отражающую поверхность; третью отражающую поверхность, неподвижно закрепленную относительно второй отражающей поверхности; четвертую отражающую поверхность, неподвижно закрепленную относительно первой отражающей поверхности; первый переменный зазор между первой отражающей поверхностью и второй отражающей поверхностью; второй переменный зазор между третьей отражающей поверхностью и четвертой отражающей поверхностью; и настройки оптического измерительного устройства таким образом, чтобы разность между первым переменным зазором и вторым переменным зазором в основном сводилась к нулю при работе устройства в номинальных условиях.
Термин перемещение, используемый здесь, означает изменение в положении в течение времени. Перемещение может включать в себя относительное перемещение (например, перемещение элемента относительно датчика, другого элемента или остальной части устройства) или абсолютное перемещение (например, перемещение относительно земли).
Термин «носитель», используемый здесь, означает любой прибор, составную часть прибора, комбинацию приборов, материал или элемент, которые могут применяться для передачи, укрытия, подвески или улучшения использования иным образом другого прибора, составной части прибора, комбинации приборов, материала и/или элемента. Иллюстративными, неограничивающими объем изобретения, носителями являются гибкие наматываемые на барабан трубы, сочлененные колонны бурильных труб и любые их комбинации. Иллюстративными, неограничивающими объем изобретения, транспортирующими устройствами являются шлангокабели, сочлененные колонны бурильных труб и любые их комбинации. Другими примерами транспортирующего устройства являются обсадные трубы, талевые канаты, каротажные кабели, тросовая поволока, инициирующие штанги, внутрискважинные переводники, КНБК, вставыши бурильной колонны, модули, внутренние корпуса и части подложки и самоходные трактора.
Термин "данные", используемый выше, подразумевает любую форму данных (аналоговую, цифровую, ЭМИ, печатную и т.д.). В данном описании термин "данные" может включать в себя: необработанные данные, обработанные данные и сигналы. Термин "процессор" в данном описании включает в себя, но не ограничиваясь, любое устройство, которое передает, принимает, обрабатывает, преобразует, высчитывает, модулирует, трансформирует, несет, хранит или иным образом использует данные. В вариантах осуществления процессор способен включать в себя резидентную (и/или внешнюю) память, функционально соединенную с процессором для выполнения задач, содержащихся в данной памяти. В некоторых, не ограничивающих вариантах осуществления настоящего изобретения, процессор может представлять собой компьютер, который выполняет команды, содержащиеся в таких программах для осуществления различных способов. Процессор способен выполнять команды, хранящиеся в памяти компьютера и доступные процессору, или использовать программируемые логические интегральные схемы (FPGA), специализированные интегральные схемы (ASIC) и другие аппаратные средства с комбинаторной или последовательной логикой.
Под величиной перемещения "по существу нуль" разницы в длине резонатора в номинальных условиях подразумевается расстояние, равное нулю, практически допускающее использование производственных допусков для эталонов Фабри-Перо, изготовленных для использования в скважине, а примерами такого расстояния, например, являются величины менее 100 нм, менее 50 нм, менее 20 нм, менее 10 нм, менее чем 5 нм, менее 3 нм и так далее, вплоть до нулевого расстояния. При этом, условия воздействия окружающей среды "на" компонент датчика относятся к условиям в месте, достаточно близком к компоненту, поэтому любые отличия в условиях неразличимы при использовании датчика для оценки исследуемого параметра ствола скважины, а примерами такого расстояния, например, являются величины менее 1 метра, менее 20 сантиметров, меньше 10 сантиметров, менее 5 сантиметров, менее 3 см, и так далее, вплоть до нулевого расстояния. Температура на оптическом измерительном устройстве определяется как температура в месте, достаточно близком к оптическому измерительному устройству, чтобы отличаться от окружающей температуры резонатора оптического измерительного устройства менее чем на 1 процент, 0,5 процента, 0,2 процента , 0,1 процента, 0,01 процента или менее; или температура в месте, достаточно близком к оптическому измерительному устройству, чтобы отличаться от температуры окружающей среды резонатора таким образом, чтобы ошибка измерения датчика из-за смещения составила менее 1, 0,5, 0,2, 0,1 или 0,01 процента.
Некоторые варианты осуществления настоящего изобретения могут быть реализованы с помощью аппаратных средств, включающих в себя процессор, материальный носитель информации, устройство ввода, память процессора, а также периферийный материальный носитель информации. Аппаратные средства могут находиться в скважине, на буровой установке, или на удаленном терминале. Более того, отдельные компоненты аппаратных средств могут распределяться среди этих мест. Устройство ввода может представлять собой устройство считывания данных или пользовательское устройства ввода, например, устройство считывания карт памяти, клавиатура, USB-порт и т.д. Материальный носитель информации хранит информацию от датчиков. Материальный носитель информации представляет собой любой энергонезависимый машиночитаемый носитель для стандартного хранения компьютерной информации, например, флешка, карта памяти, жесткий диск, ОЗУ, стираемое ППЗУ, электрически программируемое ПЗУ, флэш-память и оптические диски или другие обычно используемые системы хранения памяти, известные любому специалисту в данной области техники, включая хранения данных в интернете. Материальный носитель информации хранит программу, при выполнении которой, процессор выполняет описанный способ. Материальный носитель информации также хранит информацию о пласте, предоставленную пользователем, или информация о пласте может храниться на периферийном материальном носителе информации, который может представлять собой любое устройство хранения данных стандартного компьютера, такое как флешка, карта памяти, жесткий диск, ОЗУ, или другая обычно используемая система хранения памяти, известная любому специалисту в данной области техники, включая хранения данных в интернете. Устройство обработки информации может представлять собой любой тип компьютера или аппаратного средства математической обработки, включая аппаратные средства на базе интернета. При загрузке программы с материального носителя в память процессора (например, ОЗУ компьютера), программа извлекает данные детектора с любого материального носителя или периферийного материального носителя информации и обрабатывает данные для оценки исследуемого параметра. Устройство обработки информации может располагаться на поверхности или в скважине.
Поскольку изобретение описывалось со ссылкой на пример осуществления, то понятно, что вноситься различные изменения и использоваться эквиваленты вместо элементов изобретения, без отступления от объема настоящего изобретения. Кроме того, очевидно, что вышеупомянутое изобретение может быть далее развито в нескольких вариантах путем адаптации конкретного инструмента, ситуации или материала к принципам изобретения без отступления от его основного объема. Таким образом, предполагается, что изобретение не ограничивается конкретным вариантом осуществления, описанном, как наилучший способ осуществления настоящего изобретения, но что изобретение будет включать все варианты осуществления, попадающие в объем прилагаемой формулы изобретения.
Поскольку упомянутое выше описание направлено на некоторые, не ограничивающие объем настоящего изобретения, иллюстративные примеры осуществления, возможны различные модификации, очевидные специалистам в данной области техники. Предполагается, что все варианты осуществления, в пределах объема и сущности прилагаемой формулы изобретения, охватываются упомянутым выше описанием.
Реферат
Использование: для оптического измерения перемещения. Сущность изобретения заключается в том, что осуществляют генерацию данных от оптического измерительного устройства, относящихся к относительному перемещению исследуемого параметра между двумя или несколькими отражающими поверхностями оптического измерительного устройства; предотвращение изменений в данных, в результате изменений в оптическом измерительном устройстве из-за: i) температуры или ii) давления, путем компенсации изменений в оптическом измерительном устройстве. Компенсация включает в себя корректировку, по меньшей мере, одного источника света, генерирующего электромагнитный луч, по меньшей мере, частично, принятого оптическим измерительным устройством в ответ на корректирующие данные, относящиеся к устройству управления оптическим измерительным устройством в оптическом измерительном устройстве. Компенсация включает в себя использование оптического измерительного устройства и настройку оптического измерительного устройства таким образом, чтобы разность между первым переменным зазором и вторым переменным зазором в основном равнялась нулю при работе устройства в номинальных условиях. Технический результат: обеспечение возможности повышения чувствительность датчика к перемещению. 2 н. и 11 з.п. ф-лы, 12 ил.
Комментарии