Устройство для измерения радиуса оптической сферической поверхности - RU200479U1
Код документа: RU200479U1
Чертежи


Описание
Предлагаемая полезная модель относится к измерительной технике и может быть использована в устройствах для измерения радиуса оптических сферических поверхностей, а также при контроле оптических деталей как в процессе их изготовления, так и после него.
Известно устройство по патенту РФ на полезную модель №87793 (опубл. 20.10.2009, бюл. №29) для измерения радиуса сферических полированных поверхностей, содержащее расположенные вдоль оси контроля автоколлимационное устройство, интерферометрическую насадку с выпуклой или вогнутой эталонной сферической поверхностью и устройство для установки контролируемой детали, положительная линза для создания параллельного сходящегося или расходящегося пучка лучей автоколлимационного устройства подвижно установлена вдоль оптической оси, интерферометрическая насадка выполнена в виде пробного стекла, а устройство для установки контролируемой детали выполнено в виде неподвижных упоров, жестко закрепленных на пробном стекле таким образом, что при опоре на них центры сферических поверхностей пробного стекла и измеряемой детали совпадают, а расстояние между измеряемой поверхностью детали и эталонной поверхностью пробного стекла не превышает 5 мм.
Данное устройство предназначено для измерения радиуса кривизны поверхности изготавливаемой детали на рабочем месте, предусматривает возможность измерения деталей, обрабатываемых блоком.
Основными недостатками данного устройства являются:
невозможность измерения радиусов со значениями, сильно отступающими от радиуса эталонной поверхности;
механический контакт между контролируемой и эталонной поверхностью, что может привести как к повреждению контролируемой поверхности, так и к ее деформации в процессе контроля.
Известно устройство измерения воздушных промежутков оптических систем при помощи низкокогерентной интерферометрии или интерферометрии белого света (https://trioptics.com/products/optisurf-center-thickness-and-air-gap-measurement/#knowledge-base).
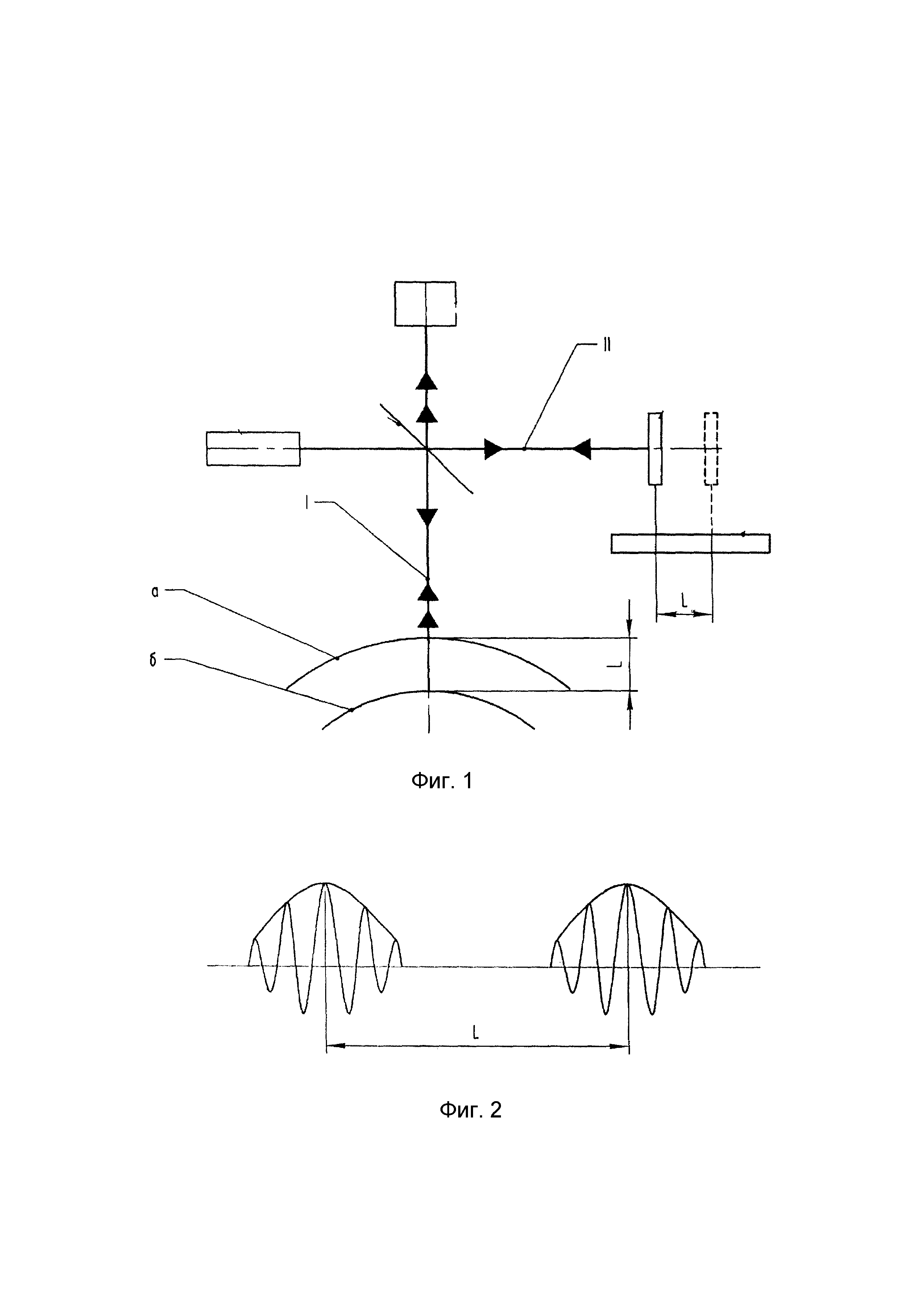
Устройство содержит некогерентный источник света, светоделительный элемент, подвижное зеркало, фотодиод и линейный энкодер.
Узкий пучок света от некогерентного источника света (фиг. 1) падает на светоделительный элемент, который делит пучок на два: измерительный I и референтный II.
Измерительный пучок I падает поочередно на две контролируемые поверхности (а и б), расстояние между которыми необходимо измерить и соответственно отражается этими поверхностями обратно. Референтный пучок II отражается подвижным зеркалом.
В обратном ходе оба пучка соединяются после светоделительного элемента и падают на фотодиод.
В процессе измерения подвижное зеркало перемещается таким образом, чтобы длина хода референтного пучка II последовательно равнялась длине хода измерительного пучка I, отраженного от контролируемых поверхностей а и б.
Известно, что условием максимальной/минимальной освещенности интерференционной картины является кратность разности хода двух интерферирующих пучков длине волны, - k*λ, но, так как источник света не когерентный, то пока разности хода измерительного I и референтного II пучков не начнут приближаться по величине, никакого изменения освещенности не будет. По мере выравнивания длин хода освещенность начнет изменяться с шагом λ и максимальная амплитуда изменения будет достигнута тогда, когда длины хода в обеих ветвях будут выровнены.
Изменение освещенности фиксируется фотодиодом, одновременно с координатой связанной с положением подвижного зеркала при помощи линейного энкодера. Данные предаются на компьютер для обработки.
Алгоритм обработки полученных данных следующий. Строится график изменения освещенности от координаты (фиг. 2). Затем, строится огибающая максимумов освещенности и находится максимум огибающей и соответствующая ему координата, которая принимается за координату поверхности. При своем перемещении подвижное зеркало последовательно проходит положение равенства длины хода с контролируемыми поверхностями а и б.
Таким образом, получают координаты обеих контролируемых поверхностей, разность которых L дает нам величину расстояния между ними.
Вышеописанное устройство само по себе позволяет измерять расстояние между оптическими поверхностями, но при этом нет возможности перевести это расстояние в радиус контролируемой поверхности.
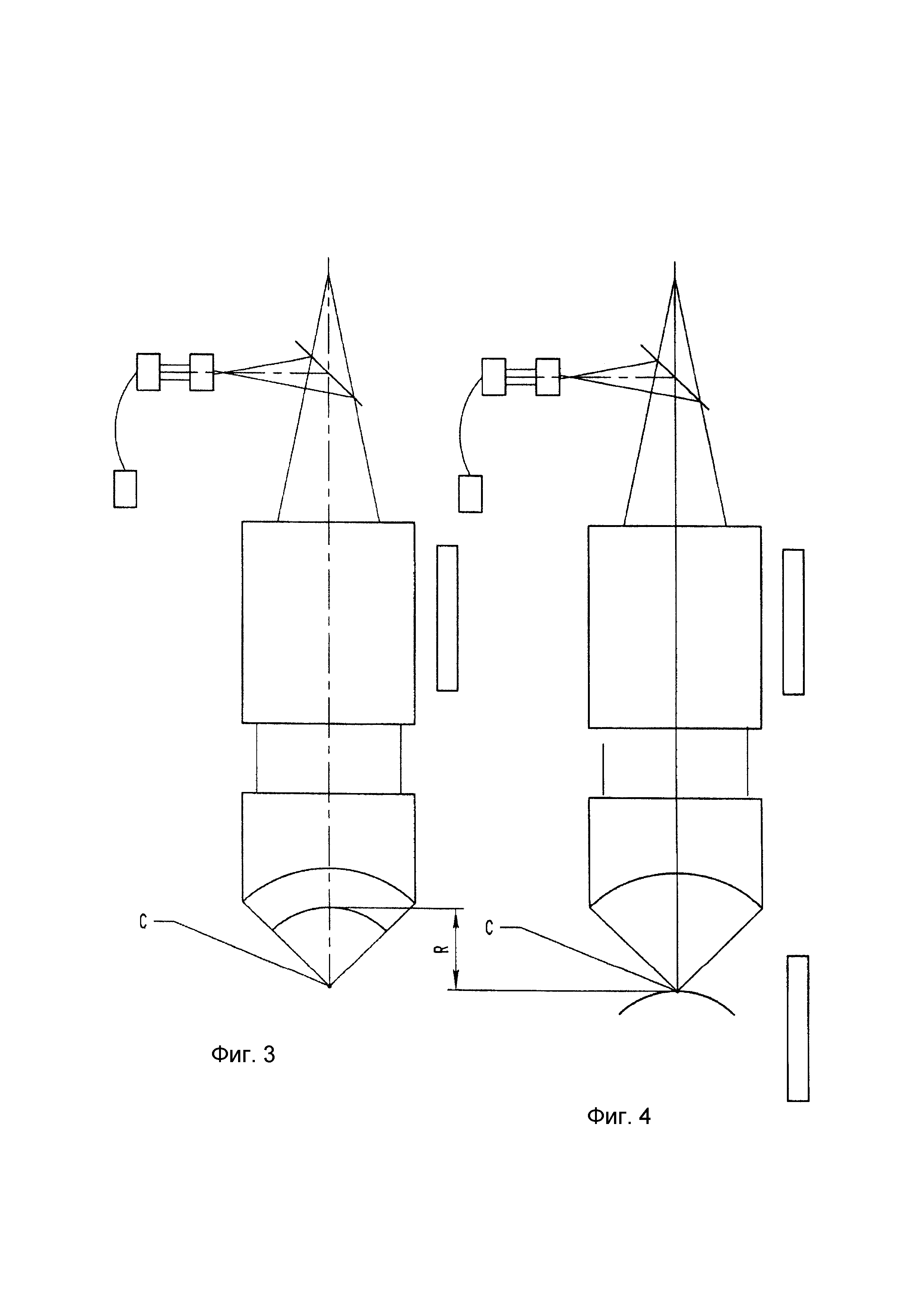
Наиболее близким техническим решением к предлагаемой полезной модели является известный интерферометр Физо, с помощью которого измеряют радиус оптической сферической поверхности (https://www.laserfocusworld.com/test-measurement/test-measurement/article/16550235/interferometry-achieving-precision-radius-metrology-for-large-optics.)
Интерферометр Физо (фиг. 3) состоит из когерентного источника света, светоделительного элемента, коллиматора, линейного энкодера, объектива построения изображения интерферограмм, ПЗС камеры и эталонного объектива. В зависимости от компоновки интерферометра энкодер может быть совмещен с механизмом перемещения эталонного объектива и коллиматора, обычно для вертикальной компоновки, либо с механизмом перемещения контролируемой поверхности, обычно для горизонтальной компоновки.
Для измерения радиуса оптической сферической поверхности детали, ее устанавливают сначала таким образом, чтобы центр кривизны «С» контролируемой поверхности детали совпал с центром кривизны эталонной поверхности объектива - конфокальная позиция (фиг. 3).
При помощи котировочных перемещений добиваются точного совмещения, при котором наблюдается «бесконечно широкая полоса», о чем свидетельствует близость общей ошибки (power, defocus), полученной из расчета тем или иным программным обеспечением к нулю (фиг. 5).
С линейного энкодера, являющегося частью интерферометра Физо снимается отсчет/обнуляется значение.
Контролируемая поверхность перемещается относительно эталонной поверхности в положение «кошачий глаз» (cat eyes position). В этом положении центр кривизны эталонной поверхности совпадает с контролируемой поверхностью (фиг. 4)
При помощи котировочных перемещений добиваются точного совмещения, при котором наблюдается «бесконечно широкая полоса», о чем свидетельствует близость общей ошибки (power, defocus), полученной из расчета тем или иным программным обеспечением к нулю (фиг. 6).
С линейного энкодера, являющегося частью интерферометра Физо снимается отсчет.
Видно, что разница R между отсчетами снятыми в конфокальной позиции и позиции «кошачьего глаза» равна радиусу контролируемой поверхности.
Одним из недостатков известного устройства является невозможность измерения радиусов, больших величины перемещения/длины линейного энкодера интерферометра Физо. Таким образом, для измерения больших радиусов требуется длинный энкодер и соответствующее рабочее место.
Основной задачей, на решение которой направлена полезная модель, является расширение функциональных возможностей устройства, а именно, создание возможности измерения радиусов поверхности обрабатываемой детали, больших максимальной величины перемещения эталонного объектива или контролируемой поверхности и длины энкодера интерферометра Физо, на ограниченном рабочем месте, возможности измерения деталей, обрабатываемых блоком, сокращение длительности процесса измерения, упрощение конструкции прибора и уменьшение его габаритов.
Поставленная задача решается с помощью устройства для измерения радиуса оптической сферической поверхности, которое, как и прототип, содержит интерферометр Физо, состоящий из когерентного источника света, светоделительного элемента, коллиматора, объектива построения изображения интерферограмм, ПЗС камеры и эталонного объектива.
В отличие от прототипа в устройство введены дополнительный светоделительный элемент, установленный между коллиматором и эталонным объективом и низкокогерентный интерферометр, включающий некогерентный источник света, светоделительный элемент низкокогерентного интерферометра, подвижное зеркало, фотодиод, линейный энкодер низкокогерентного интерферометра, при этом низкокогерентный интерферометр связан с дополнительным светоделительным элементом таким образом, что пучок света от низкокогерентного интерферометра падает на дополнительный светоделительный элемент, при этом радиус контролируемой поверхности равен сумме или разности между радиусом эталонной поверхности и расстоянием L между эталонной и контролируемой поверхностями, измеряемым низкокогерентным интерферометром.
Сущность предлагаемой полезной модели заключается в том, что благодаря конструктивному решению устройства появилась возможность измерения радиуса контролируемой поверхности путем измерения расстояния между контролируемой и эталонной поверхностями в конфокальной позиции.
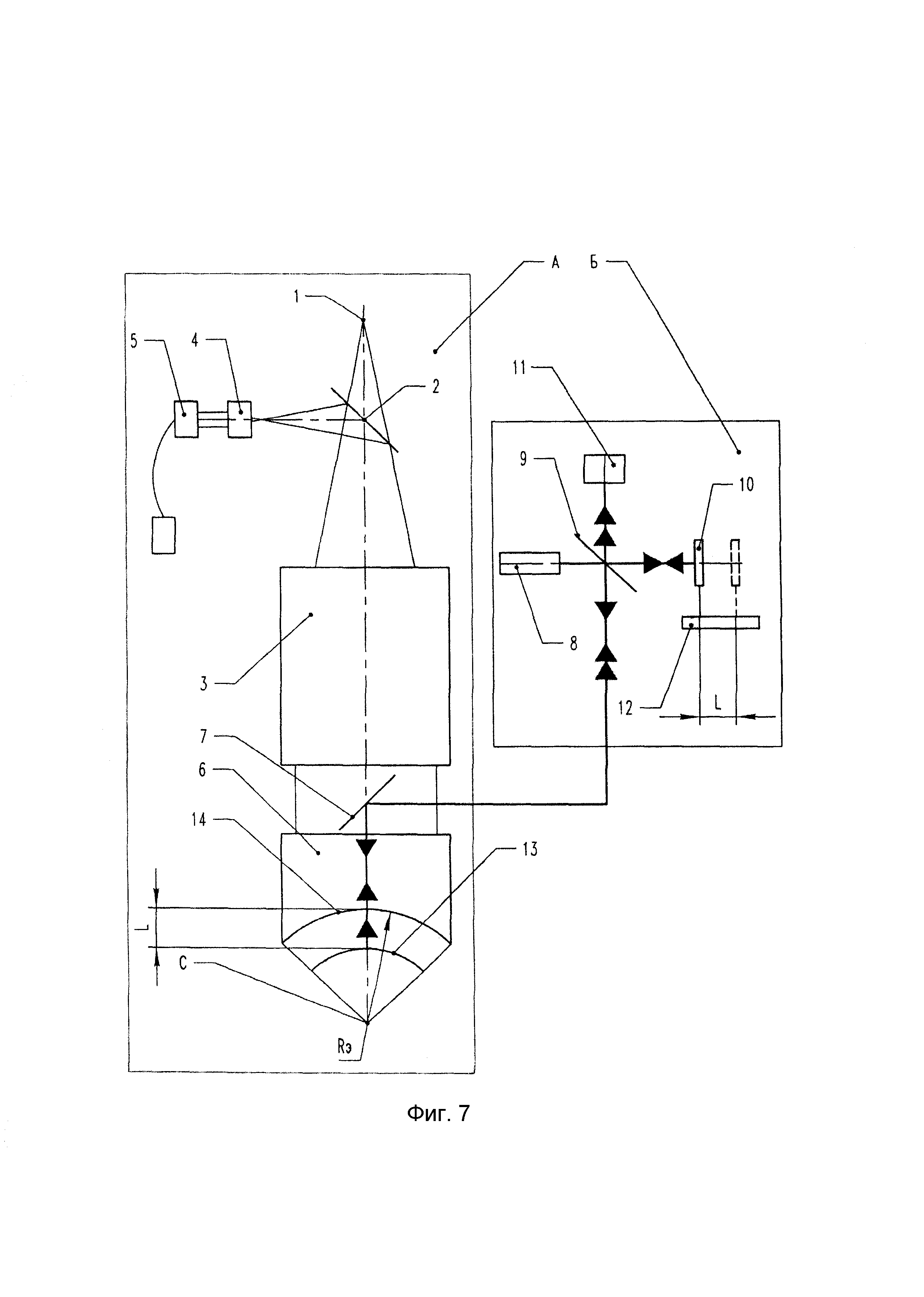
Предлагаемая полезная модель иллюстрируется чертежом, где на фиг. 7 - представлена общая схема устройства для измерения радиуса оптической сферической поверхности.
Устройство для измерения радиуса оптической сферической поверхности, содержит интерферометр Физо А, состоящий из когерентного источника света 1, светоделительного элемента 2, коллиматора 3, объектива построения изображения интерферограмм 4, ПЗС камеры 5 и эталонного объектива 6, в устройство введены дополнительный светоделительный элемент 7 установленный между коллиматором 3 и эталонным объективом 6 и низкокогерентный интерферометр Б, включающий некогерентный источник света 8, светоделительный элемент 9 низкокогерентного интерферометра, подвижное зеркало 10, фотодиод 11 и линейный энкодер 12 низкокогерентного интерферометра. Пучок света от низкокогерентного интерферометра Б падает на дополнительный светоделительный элемент 7, при этом радиус контролируемой поверхности 13 равен сумме или разности между радиусом эталонной поверхности 14 и расстоянием L между эталонной 14 и контролируемой 13 поверхностями, измеряемым низкокогерентным интерферометром Б.
Работа устройства для измерения радиуса оптической сферической поверхности осуществляется следующим образом.
Измеряемая деталь с контролируемой поверхностью 13 устанавливается таким образом, чтобы ее центр кривизны «С» совпал с центром кривизны эталонной поверхности 14 эталонного объектива 6 (конфокальная позиция).
Измерительный пучок I низкокогерентного интерферометра Б через дополнительный светоделительный элемент 7 падает на эталонный объектив 6 интерферометра Физо со стороны коллиматора 3 и, пройдя через эталонный объектив 6, последовательно отражается от эталонной поверхности 14 эталонного объектива 6 и от контролируемой поверхности 13 измеряемой детали. Расстояние L между этими поверхностями измеряется при помощи низкокогерентного интерферометра Б. Радиус эталонной поверхности 14 RЭ должен быть известен с высокой точностью.
Тогда возможно определить радиус контролируемой поверхности 13 как сумму (разность) между радиусом эталонной поверхности 14 и расстоянием L между эталонной 14 и контролируемой 13 поверхностями.
В этом случае для измерения требуется линейный энкодер 12 низкокогерентного интерферометра с диапазоном, соответствующим расстоянию L между эталонной 14 и контролируемой 13 поверхностями.
При этом предел измерения радиуса определяется наличием определенного набора эталонных объективов.
Таким образом, предлагаемое техническое решение расширяет функциональные возможности устройства для измерения радиуса оптической сферической поверхности, заключающиеся в возможности измерения радиусов обрабатываемой детали больших величины перемещения и длины энкодера интерферометра Физо на ограниченном рабочем месте, возможности измерения деталей, обрабатываемых блоком, упрощения конструкции прибора, уменьшения его габаритов и сокращении длительности процесса измерения.
Реферат
Полезная модель относится к измерительной технике и может быть использована в устройствах для измерения радиуса оптических сферических поверхностей, а также при контроле оптических деталей как в процессе их изготовления, так и после него. Сущность: устройство для измерения радиуса оптической сферической поверхности содержит интерферометр Физо, состоящий из когерентного источника света, светоделительного элемента, коллиматора, объектива построения изображения интерферограмм, ПЗС камеры и эталонного объектива. В устройство введены дополнительный светоделительный элемент, установленный между коллиматором и эталонным объективом, и низкокогерентный интерферометр, включающий некогерентный источник света, светоделительный элемент низкогогерентного интерферометра, подвижное зеркало, фотодиод, линейный энкодер низкокогерентного интерферометра. При этом низкокогерентный интерферометр связан с дополнительным светоделительным элементом таким образом, что пучок света от низкокогерентного интерферометра падает на дополнительный светоделительный элемент, при этом радиус контролируемой поверхности равен сумме или разности между радиусом эталонной поверхности и расстоянием L между эталонной и контролируемой поверхностями, измеряемым низкокогерентным интерферометром. Благодаря конструктивному решению устройства появилась возможность измерения радиуса контролируемой поверхности путем измерения расстояния между контролируемой и эталонной поверхностями в конфокальной позиции. 7 ил.

Комментарии