Скребок ленты и способ эксплуатации скребка ленты - RU2758220C1
Код документа: RU2758220C1
Чертежи




Описание
Изобретение относится к скребку ленты и к способу его эксплуатации.
Скребки ленты используются для транспортерных лент, которые используются для транспортировки самых разных транспортируемых материалов. Благодаря прикладыванию скребкового элемента к движущейся ленте соскребается прилипающий к ней транспортируемый материал.
Известны различные типы и конструкции скребков ленты. Например, DE 102017114931 A1 показывает скребковую систему для образованной разгрузочным барабаном области разворота быстроходных лент ленточных транспортеров. На ориентированном поперек к направлению движения ленты ленточного транспортера носителе системы закреплены друг около друга скребковые блоки из упругого материала. Носитель системы подвешен при помощи крепления носителя на обеих сторонах с возможностью поворота вокруг оси поворота носителя. При помощи пружинного устройства прикладывается задаваемый крутящий момент, который направлен против направления вращения разгрузочного барабана. Ось поворота носителя допускает поворот носителя системы на такой угол поворота, что может осуществляться движение отхода носителя системы вместе с его скребковыми блоками.
WO 2014/106621 A2 описывает модуль скребка ленты для скребкового устройства для области обратного хода транспортерных лент. Несколько модулей скребка ленты смонтированы на одном регулируемом по высоте носителе системы. Каждый модуль имеет ножку, которая закреплена на носителе системы, и носитель режущего инструмента, на котором размещена скребковая лопатка со скребковой кромкой. Каждый модуль имеет далее скребковое тело с имеющим два шарнира шарнирным корпусом. Ось поворота первого шарнира проходит поперек к направлению движения транспортерной ленты. Второй шарнир имеет втулку, в которой установлен с возможностью поворота носитель режущего инструмента, и ось поворота которого проходит вдоль направления движения транспортерной ленты. Первый шарнир оснащен устройством измерения угла пружины и неподвижным упором для отклонения. В варианте осуществления на стороне модуля, на котором размещен стопор, предусмотрено устройство для электронного измерения угла поворота, которое может интегрироваться, например, в защитную крышку. Положение угла поворота может выявляться, оцифровываться и преобразовываться в сигнал.
US 2007/0029169 A1 раскрывает скребок для очистки поверхности транспортерной ленты. Тело скребка включает в себя ножку, которая размещена на поперечной балке, и скребковый элемент, который распространяется от ножки до скребкового наконечника. Скребок включает в себя заделанные во вставке электрические датчики. В варианте осуществления поперечная балка со скребками, вращательным приводным элементом и носителями расположена с возможностью поворота вокруг оси. Линейный приводной элемент с цилиндром и поршнем для пневматической или гидравлической эксплуатации расположен на одном носителе и неподвижном элементе. Приводной элемент может включать в себя датчик положения, для того чтобы генерировать сигнал для отображения положения приводного элемента, из которого может вычисляться положение и угол очистки скребка.
Задача изобретения предложить скребок ленты и способ его эксплуатации, которые делают возможным наиболее простое и точное выявление данных о рабочем состоянии, не нарушая при этом процесс эксплуатации.
Задача решается с помощью скребка ленты согласно пункту 1 формулы изобретения и с помощью способа эксплуатации согласно пункту 14 формулы изобретения. Зависимые пункты формулы изобретения относятся к предпочтительным вариантам осуществления изобретения.
Соответствующий изобретению скребок ленты имеет, по меньшей мере, один скребковый элемент для контакта с лентой. В качестве скребкового элемента может пониматься тело любого типа и формы, которое подходит для того, чтобы при прикладывании к ленте иметь соскребающее действие. Скребковый элемент может прилегать к ленте, например, с или без обдирающего эффекта.
В качестве поверхности контакта с лентой предпочтителен плоскостной или линейный контакт. Скребковый элемент может быть выполнен, например, в виде блока, как в DE 10 2017 114 931, или в виде лопатки (ламель), как в WO 2014/106621 A2. Скребковый элемент может состоять из различных материалов, например, из пластика или металла, в частности твердого металла. В частности, скребковый элемент может быть выполнен из нескольких частей, например, в виде блока из пластика или резины, который снабжен накладкой из металла, например твердого металла.
Скребковый элемент расположен с возможностью поворота вокруг оси поворота. Ось поворота проходит предпочтительно, по меньшей мере, по существу поперек к направлению движения ленты, то есть, например, параллельно к оси вращения концевого или разгрузочного барабана. При этом скребковый элемент расположен с возможностью поворота таким образом, что он посредством поворотного движения вокруг оси поворота может отрываться от ленты. Так скребковый элемент может отклоняться, для того чтобы пропускать препятствия на ленте, как например дефекты ленты или утолщения.
Согласно изобретению скребковый элемент прилегает к ленте с нагружением усилием, то есть с предварительным напряжением, то есть на скребковый элемент действует крутящий момент вокруг оси поворота по направлению к положению прилегания скребкового элемента к ленте. Для создания крутящего момента предусмотрен согласно изобретению, по меньшей мере, один пружинный элемент, причем расположены предпочтительно несколько пружинных элементов, например, по меньшей мере, по одному пружинному элементу на каждую сторону. Пружинный элемент может быть выполнен по-разному, например предпочтительно в виде винтовой пружины, однако альтернативно также, например, в виде листовой пружины, торсионной пружины, тарельчатой пружины или блочной пружины. Пружинный элемент может быть расположен в пружинном устройстве, то есть, например, воздействовать на рычаг или другой механический элемент, который соединен со скребковым элементом. При этом пружинный элемент может действовать, например, как пружина растяжения или сжатия.
Во время работы скребковый элемент прилегает таким образом благодаря действию пружины с предварительным напряжением, однако он может упруго отворачиваться (отклоняться) против усилия пружины. При отворачивании (отклонении) и последующем возращении в положение соскребания получается таким образом изменяющийся угол поворота.
Пружинный элемент может быть также соединен, по меньшей мере, с одним демпфирующим элементом, для того чтобы делать возможным демпфированное движение скребкового элемента, для того чтобы обеспечивать таким образом наиболее хорошее прилегание скребкового элемента к ленте. В случае применения блочной пружины, например блока из резины или эластомера в качестве пружины растяжения или сжатия, демпфирующие и пружинящие свойства могут быть реализованы в одном элементе.
Возможны также комбинации различных типов пружинных элементов и/или демпфирующих элементов, например комбинация винтовой пружины с блочной пружиной.
Согласно изобретению для выявления актуального в каждом случае угла поворота скребкового элемента предусмотрен датчик. Соответствующий изобретению датчик работает согласно принципу бесконтактного измерения и включает в себя, по меньшей мере, одну индексную часть и детекторную часть, которые подвижны друг относительно друга и предпочтительно полностью независимы друг от друга. Детекторная часть рассчитана и подходит для регистрации положения индексной части относительно детекторной части. Предпочтительно детекторная часть подходит, по меньшей мере, для того, чтобы регистрировать расстояние до индексной части, альтернативно или дополнительно может также осуществляться регистрация ориентации, то есть, например, положения поворота индексной части относительно детекторной части.
В соответствии с регистрацией положения индексной части датчик может выдавать сигнал, предпочтительно в виде электрического сигнала, например в аналоговой форме в виде сигнала тока и/или напряжения, а также альтернативно или дополнительно в виде цифрового сигнала.
Регистрация индексной части может происходить согласно принципу любого бесконтактного датчика, например оптического (например, при помощи лазера, инфракрасного излучения и т.д.), акустического (например, при помощи ультразвука), емкостного, индуктивного, магнитного, магнито-индуктивного и т.д. Предпочтительно индексная часть является автономной, то есть кроме механического закрепления не требует функционального подключения, в частности электрического подключения. В то время как электроснабжение возможно, например, при помощи батареи, аккумулятора или беспроводной подачи электрической мощности, предпочтительно индексная часть не требует электроснабжения. Индексная часть может генерировать или модифицировать поле и/или волну использованной для регистрации среды (например, оптической, магнитной, электрической, акустической).
Предпочтительно индексная часть датчика может включать в себя, по меньшей мере, один магнитный элемент, а детекторная часть, по меньшей мере, один сенсорный элемент магнитного поля. Магнитный элемент может быть, например, элементом постоянного магнита. Сенсорный элемент магнитного поля может включать в себя, например, сенсорный элемент Холла и/или магнитомягкий элемент с катушечной системой, в частности магнитомягкий элемент высокой магнитной проницаемости.
Детекторная часть снабжена средствами для регистрации положения индексной части. Предпочтительно детекторная часть может иметь электрическую схему регистрации и оценки, которая может эксплуатироваться для того, чтобы генерировать сигнал датчика в зависимости от положения индексной части. Детекторная часть может иметь электрический соединительный кабель, по которому может подаваться электроснабжение для работы электрической схемы. Электрический соединительный кабель может альтернативно или дополнительно служить также для передачи электрического сигнала датчика.
Согласно изобретению индексная часть расположена на соединенном со скребковым элементом подвижном элементе на расстоянии от оси поворота.
Говоря о соединенном со скребковым элементом подвижном элементе, речь может идти, например, о штанге, рычаге или другом механическом элементе, который механически соединен со скребковым элементом таким образом, что он выполняет связанное с поворотным движением движение. Например, индексная часть может быть размещена на рычаге, который относительно оси поворота неподвижно соединен со скребковым элементом и таким образом всегда выполняет то же поворотное движение, как и этот скребковый элемент. Наряду с таким непосредственным соединением подвижного элемента речь может также идти об опосредованном соединении, например через один или несколько шарниров; например, подвижный элемент может быть шарнирно соединен со скребковым элементом или неподвижным относительно него рычагом. В любом случае речь идет о подвижной части, на которой индексная часть расположена на расстоянии от оси поворота, так что поворотное движение скребкового элемента вызывает связанное с ним движение подвижного элемента и тем самым индексной части. Движение индексной части может быть, например, линейным, дугообразным или вдоль другой траектории. В любом случае благодаря регистрации положения индексной части возможен вывод о поворотном движении скребкового элемента.
В частности, для выполненной автономно индексной части эта конструкция предоставляет преимущества, так как, например, не должно протягиваться электрическое подключение, например посредством кабеля, к подвижному элементу.
Расположение индексной части на расстоянии от оси поворота создает с одной стороны условия для упрощенной конструкции, то есть, например, шарнирная конструкция может оставаться неизменной, и датчик может располагаться за пределами шарнира, предпочтительно на радиальном расстоянии от шарнира. С другой стороны поворотное движение на расстоянии от оси поворота приводит также к большему ходу, который может хорошо регистрироваться датчиком расстояния. Например, индексная часть может иметь от оси поворота расстояние, которое составляет, по меньшей мере, 5%, предпочтительно, по меньшей мере, 20%, наиболее предпочтительно 50% или больше от расстояния передней кромки скребкового элемента до оси поворота.
В одном предпочтительном варианте осуществления детекторная часть может располагаться на неподвижном элементе или, по меньшей мере, на элементе, который относительно неподвижного элемента совершает существенно меньшее движение, чем скребковый элемент. Под “неподвижным” при этом понимается то, что элемент не изменяет своего положения, когда скребковый элемент выполняет поворотное движение, например, для того чтобы пропускать дефект ленты. Предпочтительно неподвижный элемент зафиксирован или расположен неподвижно относительно опорной конструкции ленты. Если детекторная часть закреплена не на полностью неподвижном элементе, то она может быть размещена предпочтительно на подвижном в меньшей степени элементе. Под ним может пониматься элемент, который выполняет меньшее по сравнению с поворотным движением скребкового элемента поворотное движение, то есть, например, поворотное движение на существенно меньший угол поворота, который составляет, например, менее половины угла поворота скребкового элемента или предпочтительно даже менее четверти угла поворота скребкового элемента.
В одном варианте осуществления предусмотрен поворотный рычаг, который проходит от оси поворота и соединен со скребковым элементом. Поворотный рычаг предпочтительно расположен неподвижно относительно скребкового элемента, так что при поворотном движении скребкового элемента он поворачивается на тот же угол поворота. Предпочтительно поворотный рычаг распространяется в направлении, которое образует с направлением скребкового элемента тупой угол, то есть угол более 90°. При этом рассматривается в отношении поворотного рычага направление от оси поворота к его концу, а в отношении скребкового элемента направление от оси поворота к его передней кромке. Они расположены предпочтительно, по меньшей мере, по существу друг против друга, так что образованный между ними угол составляет более 90°. Благодаря противоположному расположению поворотный рычаг может располагаться таким образом, что возникает увеличенное расстояние от зоны соскребания.
Индексный элемент может быть расположен, например, на указанном поворотном рычаге. Альтернативно он может быть также расположен на соединенном с поворотным рычагом элементе, например, на шарнирно соединенной с поворотным рычагом штанге. Такая штанга может быть выполнена, например, в виде тяговой или толкающей штанги и служить для того, чтобы передавать действующее на поворотный рычаг усилие, при помощи которого создается действующий на скребковый элемент крутящий момент. Для этого со штангой может быть соединен, например, пружинный элемент. Альтернативно пружинный элемент может быть соединен также непосредственно с поворотным рычагом, для того чтобы создавать крутящий момент.
В одном варианте осуществления штанга может быть расположена в окружающем корпусе с возможностью перемещения относительно него, причем детекторная часть датчика расположена на корпусе, а индексная часть на штанге. Предпочтительно корпус может быть цилиндрическим, и штанга может перемещаться в нем в продольном направлении. Далее предпочтительно зарегистрированное датчиком относительное движение штанги относительно корпуса является, по меньшей мере, по существу линейным движением, которое можно наиболее просто регистрировать.
Датчик может быть расположен в осевом направлении оси поворота непосредственно на скребковом элементе или рядом с ним. Однако для многих исполнений может быть также предпочтительным располагать скребковый элемент и датчик на расстоянии друг относительно друга в осевом направлении оси поворота. Так, например, датчик может располагаться сбоку на удалении от области ленты, так что он не подвергается негативному влиянию соскобленного транспортируемого материала. Например, скребковый элемент может быть расположен на поворотном валу. Может быть предусмотрена, по меньшей мере, одна опора, чтобы устанавливать вал с возможностью поворота, предпочтительны две расположенные на расстоянии друг от друга опоры. В одном варианте осуществления датчик может быть расположен снаружи, то есть таким образом, что, по меньшей мере, одна опора расположена в осевом направлении между датчиком и скребковым элементом.
В одном варианте осуществления может быть предусмотрен носитель, который распространяется, например, в поперечном направлении к направлению движения ленты, предпочтительно, по меньшей мере, по ширине ленты. Носитель может быть расположен предпочтительно неподвижно. На носителе может быть закреплена предпочтительно, по меньшей мере, одна ножка скребкового модуля, предпочтительно предусмотрены несколько скребковых модулей на носителе. На ножке может быть расположен шарнир, на котором установлен с возможностью поворота скребковый элемент, например, на распространяющемся от шарнира в направлении скребкового элемента носителе скребкового элемента. Предпочтительно детекторная часть закреплена на носителе. Если несколько скребковых модулей расположены своими ножками на носителе, то, например, лишь один датчик с детекторной частью может быть предусмотрен на одном из модулей, или могут быть предусмотрены несколько датчиков, детекторные части которых закреплены в этом случае предпочтительно друг около друга на носителе.
Оказалось оптимальным располагать датчик таким образом, что при рассмотрении в направлении движения ленты ось поворота расположена между датчиком и скребковым элементом. Так датчик располагается на максимальном расстоянии от зоны соскребания.
Далее варианты осуществления изобретения описываются более подробно на основе чертежей. При этом показано:
фиг. 1 - на виде в перспективе первый вариант осуществления скребка ленты;
фиг. 2 - скребок ленты с фиг. 1 на виде сбоку;
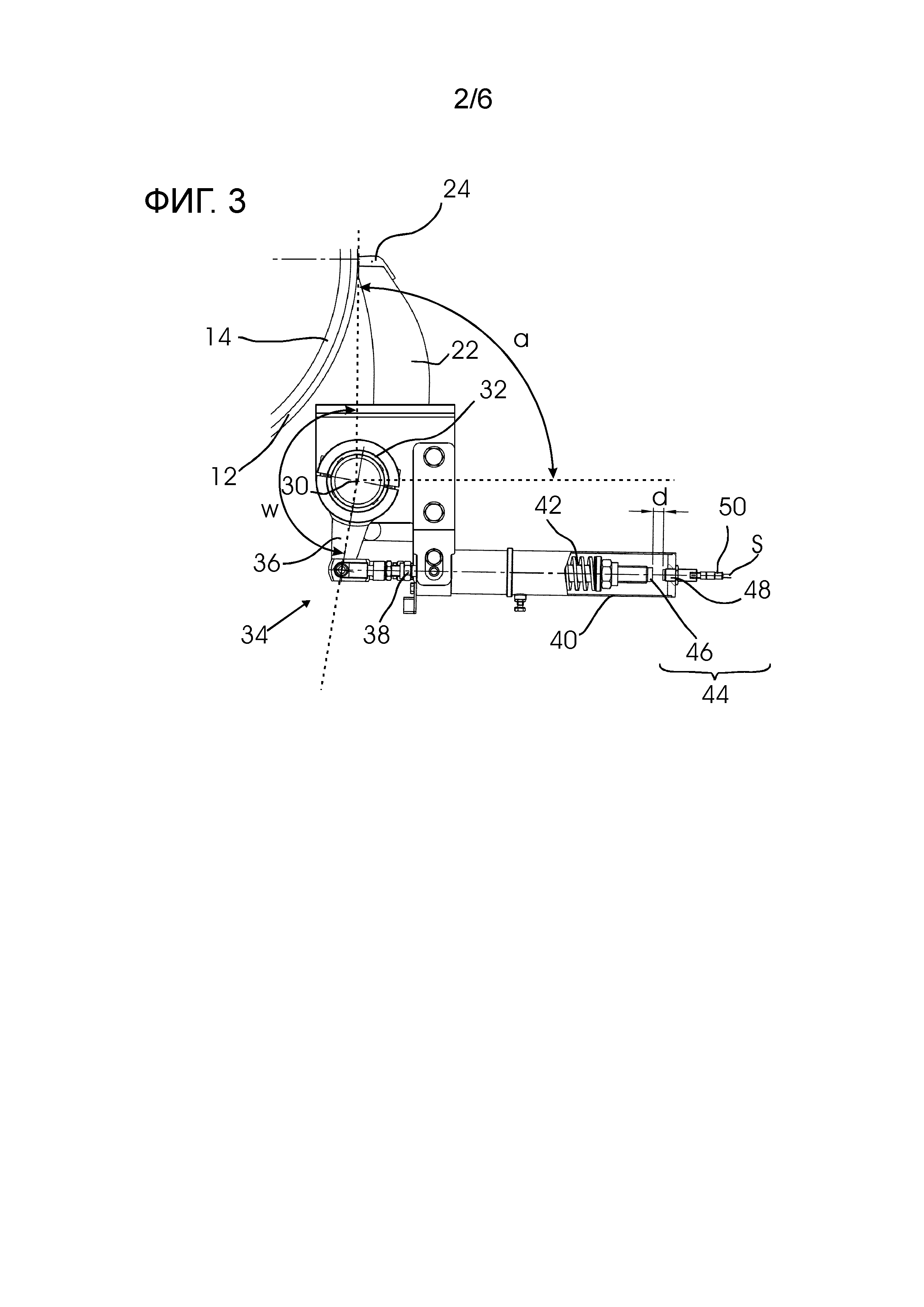
фиг. 3 - увеличенный частичный вид изображения с фиг. 2;
фиг. 4 - скребок ленты с фиг. 1-3 на виде сбоку с отклоненными (отведенными) скребковыми элементами;
фиг. 5 - скребок ленты с фиг. 1-4 на виде сбоку после возникшего износа;
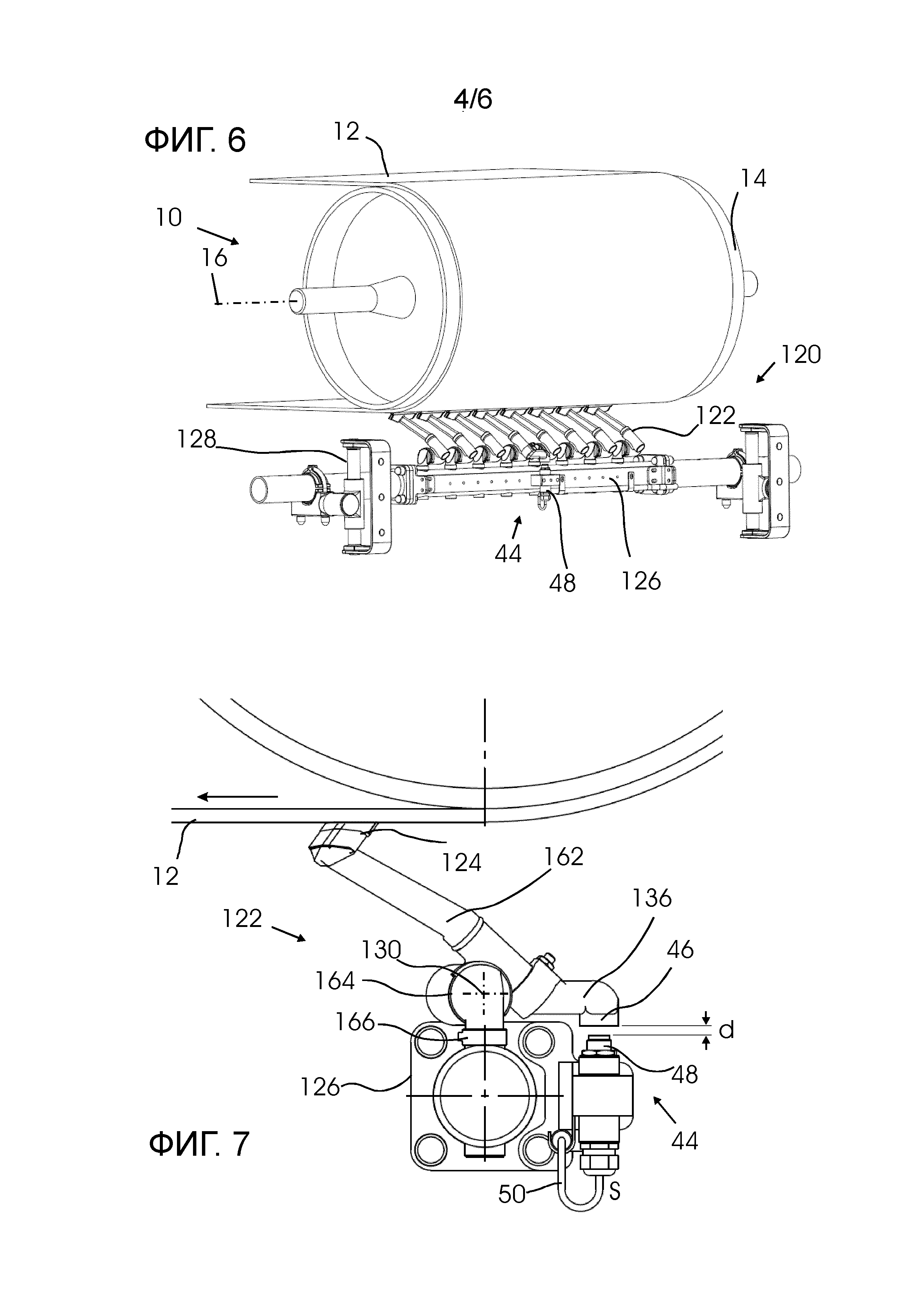
фиг. 6 - на виде в перспективе второй вариант осуществления скребка ленты с множеством скребковых модулей;
фиг. 7 - скребковый модуль с фиг. 6 на виде сбоку;
фиг. 8 - скребковый модуль с фиг. 6,7 на виде сбоку в различных поворотных положениях;
фиг. 9 - скребковый модуль с фиг. 6-8 на виде спереди; и
фиг. 10 - на схематичном изображении элементы датчика с индексной частью и детекторной частью.
Фиг. 1 показывает участок транспортерной установки 10 с транспортерной лентой 12. В области концевого и разгрузочного барабана 14, который вращается вокруг оси 16 барабана, расположен скребок 20 ленты согласно первому варианту осуществления.
При помощи скребка ленты транспортируемый материал, который находится на ленте 12 и частично прилипает к ней, соскребается с ленты 12. Скребок 20 ленты использован при этом в качестве предварительного скребка, то есть он находится выше приемного контейнера или лотка (не изображен) для приема транспортируемого материала.
Скребок 20 ленты имеет несколько расположенных друг около друга в поперечном направлении скребковых блоков 22. Скребковые блоки 22 выполнены в показанном варианте осуществления в виде цельных тел из пластика и снабжены на верхнем конце накладкой 24 из твердого металла. Скребковые блоки 22 представляют собой скребковые элементы, которые, как изображено на фиг. 2, прилегают к ленте 12, так что они находятся вдоль плоской или линейной контактной области в контакте с поверхностью ленты 12.
Скребковые блоки 22 закреплены на поворотной поперечной балке 26, которая продолжается с обеих сторон осевыми элементами 32, которые установлены в опорах 28 таким образом, что скребковые блоки 22 вместе с поперечной балкой 26 расположены с возможностью поворота благодаря повороту осевых элементов 32 вокруг оси 30 поворота.
На опорах 28 для поперечной балки 26 и осевых элементов 32 предусмотрены с обеих сторон пружинные устройства 34. Как в частности видно на фиг. 3, они включают в себя в каждом случае распространяющийся прямо от оси 30 поворота поворотный рычаг 36 и шарнирно соединенную с его концом штангу 38 пружины. Штанга 38 пружины может линейно перемещаться внутри цилиндрического корпуса 40 и нагружается там на растяжение в продольном направлении посредством пружины 42 сжатия. Таким образом, через штангу 38 пружины и поворотный рычаг 36 вся система из скребковых блоков 22 на поперечной балке 26 нагружается крутящим моментом против направления вращения барабана 14, так что скребковые блоки 22 прижимаются с усилием к поверхности ленты 12.
Поворотный рычаг 36 расположен неподвижно относительно скребковых блоков 22 и может вместе с ними поворачиваться вокруг оси 30 поворота. Как, в частности, видно на фиг. 3, в изображенном примере поворотный рычаг 36 расположен относительно оси 30 поворота напротив скребковых блоков 22, то есть первое направление от оси 30 поворота к передней кромке поверхности прилегания скребковых блоков 22 и второе направление от оси 30 к точке шарнирного соединения штанги 38 пружины с концом поворотного рычага 36 образуют тупой угол w. В альтернативных исполнениях могут также выбираться другие расположения, при которых получается другой угол w, например также острый угол.
Корпус 40 штанги пружины расположен не полностью неподвижно относительно опорной конструкции (не изображена) транспортерного устройства 10, а, как показано на фиг. 3, шарнирно соединен относительно нее, так что он может выполнять поворотное движение. Движение корпуса 40 связано при этом через штангу 38 пружины, поворотный рычаг 36 и поперечную балку 26 с движением скребковых элементов 22. Однако эта связь выполнена таким образом, что корпус 40 выполняет лишь существенно меньшее по сравнению с поворотным движением скребковых элементов 22 движение, а именно поворотное движение на существенно меньший угол поворота.
На пружинном устройстве 34 расположен датчик 44, при помощи которого угловое положение скребковых блоков 22 может выявляться и выдаваться в виде электрического сигнала S датчика. На фиг. 3 в качестве примера изображен угол a поворота между первым направлением от оси 30 поворота к передней кромке поверхности прилегания скребкового блока 22 к ленте 12 (в исходном состоянии скребкового блока 22 поверхность прилегания смещается при износе, как показано ниже) и вторым направлением, которое изображено здесь в качестве опорного направления горизонтально.
Датчик 44 регистрирует расстояние d между индексной частью 46 на конце штанги 38 пружины и детекторной частью 48, которая закреплена на конце цилиндрического корпуса 40.
Расстояние d зависит непосредственно от углового положения a скребковых блоков 22. При поворотном движении скребковых блоков 22 в направлении ленты 12, которое имеет место, например, при прогрессирующем износе (фиг. 5), угол a увеличивается. Вследствие этого благодаря соединению через поворотный рычаг 36 и штангу 38 расстояние d между концом штанги 38 и концом корпуса 40 уменьшается, то есть также расстояние между индексной частью 46 и детекторной частью 48 датчика 44. Взаимосвязь между a и d почти линейна в показанном угловом диапазоне, при котором поворотный рычаг 36 и штанга 38 пружины расположены почти под прямым углом друг к другу. При противоположном поворотном движении, когда скребковые блоки 22 отклоняется от ленты 12, угол a уменьшается, в то время как расстояние d увеличивается.
Фиг. 10 схематично показывает конструкцию датчика 44. В предпочтительном исполнении используется магнитный или магнито-индуктивный датчик, у которого индексная часть 46 выполнена в виде дискообразного постоянного магнита, который намагничен в направлении продольной оси датчика.
Детекторная часть 48 датчика расположена на расстоянии d от индексной части 46 и включает в себя в корпусе датчика сенсорный элемент 54 магнитного поля и подключенную к нему электрическую схему 52 регистрации и оценки. Схема 52 регистрации и оценки работает благодаря электроснабжению через кабельное подключение 50.
В зависимости от расстояния d постоянный магнит индексной части 46 создает различное магнитное поле в месте сенсорного элемента 54 магнитного поля, так что изменяется измеряемое физическое свойство сенсорного элемента 54 магнитного поля.
В зависимости от типа датчика могут использоваться различные типы сенсорных элементов 54 магнитного поля. Например, в качестве сенсорного элемента 54 магнитного поля может использоваться элемент Холла, сопротивление которого изменяется в зависимости от магнитного поля. Применим также магнитомягкий материал, проницаемость которого изменяется в зависимости от магнитного поля, например как описано в DE 10 2007 062 862 A1.
Схема 52 регистрации и оценки управляет сенсорным элементом 54 магнитного поля, как необходимо для регистрации магнитного поля, оценивает его измеряемые свойства и преобразовывает их в сигнал S датчика. Сигнал S датчика выдается в виде электрического сигнала по кабельному подключению 50, например в виде сигнала тока или напряжения.
Сигнал S датчика может однозначно согласовываться с расстоянием d, причем зависимость в пределах возможного диапазона поворота скребковых блоков 22 предпочтительно, по меньшей мере, по существу линейна.
Посредством оценки сигнала S датчика может выявляться, например, прогрессирующий износ скребкового элемента, в данном случае скребковых блоков 22. Как изображено в качестве примера на фиг. 5, постоянное прилегание скребковых блоков 22 к движущейся ленте 12 приводит к истиранию, так что угол a увеличивается в течение периода работы. Это отображается изменением сигнала S датчика, так что создаются условия для контроля износа, при котором имеет место сообщение, если скребковые блоки 22 должны заменяться.
Датчик 44 расположен на скребке 20, как уже разъяснялось, таким образом, что автономная индексная часть 46 закреплена на перемещающемся синхронно с поворотным движением скребкового элемента 24 элементе, а именно на штанге 38. Детекторная часть 48 размещена на почти неподвижном элементе, который выполняет существенно меньшее по сравнению с движением скребкового элемента 24 движение, а именно на корпусе 40 пружинного блока 34. Таким образом, облегчена прокладка кабеля, так как кабель 50 должен компенсировать только незначительное движение корпуса 40.
Далее описывается второй вариант осуществления скребка 120 со ссылкой на изображения фиг. 6-9. Скребок 120 равным образом размещен на транспортерной установке 10. Одинаковые ссылочные позиции относятся к одинаковым вариантам осуществления.
Скребок 120 имеет неподвижную, регулируемую по высоте, но не поворачиваемую поперечную балку (носитель системы) 126, на которой расположены друг около друга несколько скребковых модулей 122. В отношении исполнения и расположения скребковых модулей 122 делается ссылка на подробное описание в WO 2014/106621 A2.
Один из скребковых модулей 122 изображен на фиг. 7 на виде сбоку вдоль оси носителя 126 системы, на фиг. 8 на виде сбоку вдоль оси 130 поворота модуля и на фиг. 9 на виде спереди. Он включает в себя выполненную для обдирающего контакта с лентой 12 лопатку (ламель) 124 из твердого металла, которая закреплена на носителе 162 режущего инструмента, который может поворачиваться на шарнире 164 вокруг оси 130 поворота модуля. Ножка 166, которая удерживает шарнир 164, установлена в носителе 126 системы. Скребковый модуль 122 установлен с наклоном под незначительным углом относительно поперечного направления, так что хотя ось 130 поворота модуля ориентирована горизонтально и проходит по существу поперек к направлению движения ленты 12, тем не менее она не точно соответствует продольной оси носителя 126 системы.
Носитель 162 режущего инструмента и закрепленная на нем лопатка 124 расположены, как показывает фиг. 8, с возможностью поворота на шарнире 164 вокруг оси 130 поворота модуля. Угол a поворота может, например, задаваться, как показано на фиг. 8, между направлением от оси 130 поворота модуля к передней кромке лопатки 124 и горизонталью.
Внутри шарнира 164 торсионная пружина (не изображена) действует таким образом, что носитель 162 режущего инструмента нагружается крутящим моментом, посредством которого лопатка 124 прижимается в направлении прилегания к ленте 12.
Передняя кромка лопатки 124 лежит на поверхности ленты 12. При движущейся ленте 12 прилипающий транспортируемый материал соскребается таким образом.
Поворотный рычаг 136 размещен неподвижно относительно носителя 162 режущего инструмента таким образом, что он также может поворачиваться вокруг оси 130 поворота модуля. Поворотный рычаг 136 закреплен, в показанном примере зажат, в продолжение носителя 162 режущего инструмента, так что поворот носителя 162 режущего инструмента и лопатки 124 приводит к одинаковому поворотному движению поворотного рычага 136.
Датчик 44 расположен для того, чтобы регистрировать угол a поворота носителя 162 режущего инструмента и лопатки 124. Датчик 44 включает в себя размещенную на конце поворотного рычага 136 индексную часть 46 и закрепленную на носителе 126 системы детекторную часть 48.
Датчик 44 является таким же датчиком, как и был разъяснен ранее в отношении фиг. 10, то есть при помощи детекторной части 48 расстояние d до индексной части 46 регистрируется и выдается в виде сигнала S датчика по кабельному подключению 50.
Расстояние d зависит, как показано, например, на фиг. 8, от принятого носителем 162 режущего инструмента и лопаткой 124 положения, то есть от угла a. При отклонении лопатки 124 от прилегания к ленте 12 (на фиг. 8 показано штриховой линией), как это происходит в случае несоскребаемого препятствия на ленте 12, угол a увеличивается в показанном примере до значения a1, и тем самым расстояние d увеличивается до значения d1.
При постепенном износе лопатки 124 угол a и тем самым расстояние d уменьшаются.
В сигнале S датчика могут распознаваться обе ситуации, так что, как было разъяснено в связи с первым вариантом осуществления, возможен, например, контроль износа.
Во втором варианте осуществления детекторная часть 48 размещена на неподвижном элементе, а именно на носителе 126 системы, так что обеспечена простая прокладка кабелей. Индексная часть 46 расположена на подвижном элементе, а именно на поворотном рычаге 136.
Поворотный рычаг 136 распространяется относительно оси 130 поворота модуля в по существу противоположном лопатке 124 направлении, то есть первое направление от оси 130 поворота модуля к передней кромке лопатки 124 и второе направление от оси 130 поворота модуля к индексной части 46 на конце поворотного рычага 136 образуют тупой угол. При рассмотрении в направлении движения ленты 12 (фиг. 7) шарнир 164 на оси 130 поворота модуля находится между концом поворотного рычага 136 и лопаткой 124. Датчик 44 удален таким образом достаточно далеко от лопатки 124, так что он не подвергается негативному воздействию от снятого транспортируемого материала.
Реферат
Изобретение относится к скребку (20, 120) ленты. Скребковый элемент (22, 24, 124) для контакта с лентой (12) расположен с возможностью поворота относительно оси (30, 130) поворота, причем пружинный элемент (42) обеспечивает крутящий момент на скребковый элемент (22, 24, 124). Датчик (44) для выявления угла (a) поворота скребкового элемента (22, 24, 124) является бесконтактным датчиком с индексной частью (46) и детекторной частью (48) для регистрации положения индексной части (46). Индексная часть (46) расположена на соединенном со скребковым элементом (22, 24, 124) подвижном элементе (38, 136) на расстоянии от оси (30, 130) поворота. Обеспечивается простое и точное выявление данных о рабочем состоянии скребка. 2 н. и 12 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Очиститель ленты с расположенным под углом средством регулировки высоты
Комментарии