Контактное измерение на боковой поверхности зуба заготовки зубчатого колеса - RU2757172C2
Код документа: RU2757172C2
Чертежи



Описание
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к проведению контактного измерения, по меньшей мере, на одной боковой поверхности зуба заготовки зубчатого колеса, а также к оснащенному соответствующим образом измерительному устройству.
Предшествующий уровень техники настоящего изобретения
Геометрическая форма и свойства обработанной поверхности заготовки зубчатого колеса являются важными качественными свойствами зубчатой передачи.
Соответственно, существует множество разных измерительных устройств, предназначенных для определения геометрической формы и свойств обработанных поверхностей заготовок зубчатых колес. Способы проведения измерений подразделяются на две категории: бесконтактные способы и способы с использованием измерительных головок.
Во время механического контактного измерения контактный датчик обычно перемещается по измеряемой поверхности, в результате чего генерируются сигналы высоты, которые регистрируются по всей траектории зондирования, известной также под названием «профиль поверхности». В отношении прямозубных зубчатых колес измерения обычно проводятся лишь вдоль профиля поверхности и линии зуба. В отношении конических зубчатых колес на радиальную проекцию боковой поверхности зуба накладывается виртуальная сетка с тем, чтобы с ее помощью определить расчетные контрольные точки. Для проверки геометрической формы боковых поверхностей зубьев конических зубчатых колес достаточную эффективность демонстрируют относительно крупноячеистые сетки.
Большинство способов измерений с использованием измерительных головок предусматривает последовательные измерения, что влечет за собой увеличение временных затрат и вычислительной мощности в случае повышения точности измерений. Если взять зубчатое колесо с десятью зубьями, то необходимо замерить 20 боковых поверхностей. Если на одну боковую поверхность зуба приходится 5×9 контрольных точек, то в рамках такого измерения генерируется 900 фактически измеренных значений. В ходе вычислительного анализа и проработки указанных фактически измеренных значений они увязываются, например, с соответствующими расчетными данными. Этот простой числовой пример показывает сложность вычислений, с которой сталкивается пользователь.
Поскольку к зубчатым передачам предъявляются все возрастающие требования, часто оказываются необходимыми исследования, которые позволяют дать оценку микроструктуры боковых поверхностей зубьев. Такие оценки возможны только при повышенной дискретности измерений.
Цель настоящего изобретения заключается в том, чтобы предложить способ измерения, обеспечивающий быстрые, точные и воспроизводимые измерения поверхностных свойств боковых поверхностей зубьев.
Краткое раскрытие настоящего изобретения
Признаки способа согласно настоящему изобретению представлены в первом пункте формулы изобретения. Признаки устройства согласно настоящему изобретению представлены в двадцать первом пункте формулы изобретения. Эффективные варианты осуществления способа согласно настоящему изобретению представлены в зависимых пунктах формулы изобретения.
Согласно одному из аспектов предпочтительных вариантов осуществления настоящего изобретения измерения проводятся таким образом, что фактически измеренные значения, например, геометрической формы могут быть увязаны с фактически измеренными значениями поверхности методом простых вычислений. Для этого измерение свойства или свойств поверхности предпочтительно осуществляется в геометрически известной корреляции с измерением геометрической формы.
Во всех вариантах осуществления настоящего изобретения измерение предпочтительно проводится в критической области с использованием системы координат (например, в виде второй сетки измерений), которая находится в известной геометрической корреляции с системой координат (например, в виде первой сетки измерений) максимальной области.
Во всех вариантах осуществления настоящего изобретения вторая сетка измерений предпочтительно находится в известной геометрической корреляции с первой сеткой измерений. Во всех вариантах осуществления настоящего изобретения указанная геометрическая взаимосвязь может быть обусловлена, например, тем фактом, что первая сетка измерений и вторая сетка измерений - по меньшей мере, частично - перекрывают друг друга. Во всех вариантах осуществления настоящего изобретения первая сетка измерений и вторая сетка измерений могут также покрывать одну и ту же область боковой поверхности, т.е. две сетки измерений могут совпадать; при этом они отличаются друг от друга разной густотой ячеек. Во всех вариантах осуществления настоящего изобретения первая сетка измерений и вторая сетка измерений могут быть приведены в известную геометрическую корреляцию таким образом, чтобы две сетки измерений совокупно имели, по меньшей мере, одну общую контрольную точку (узловую точку сетки измерений).
В контексте настоящего документа термин «сетка измерений» должен толковаться в широком смысле. Он может относиться к сетке измерений с равномерной густотой ячеек, например, во всех вариантах осуществления настоящего изобретения, или же он может относиться к сетке измерений с варьирующейся густотой ячеек во всех вариантах осуществления настоящего изобретения.
Во всех вариантах осуществления настоящего изобретения вторая сетка измерений может представлять собой сетку измерений, например, с большей равномерной или варьирующейся густотой ячеек в сравнении с равномерной или варьирующейся густотой ячеек первой сетки измерений.
Во всех вариантах осуществления настоящего изобретения предпочтительно проводится измерение специализированной зубчатой передачи. Для этого фактически измеренные данные или фактические сетки измерений определяются согласно настоящему изобретению в зависимости от зубчатой передачи, подлежащей измерению.
Настоящее изобретение позволяет выявлять области, считающиеся критическими, с учетом специфики конкретного применения (например, под нагрузкой или без нагрузки).
Местоположение и/или размеры критической области могут определяться автоматически во всех вариантах осуществления настоящего изобретения (предпочтительно с компьютерной поддержкой) с тем, чтобы в этой критической области можно было проводить измерения с более высокой точностью.
Благодаря настоящему изобретению может быть локально повышена точность измерения и существенно сокращено время измерения по сравнению с измерением всей боковой поверхности зуба с высоким разрешением.
Способ согласно настоящему изобретению предпочтительно применяется таким образом, чтобы за одно измерение можно было совместно определить боковую поверхность зуба с помощью более крупной первой сетки измерений и критическую часть области боковой поверхности зуба с помощью более мелкой второй сетки измерений. Наибольший эффект достигается в том случае, если эти две сетки измерений коррелируют друг с другом известным образом (в вычислительном отношении/геометрически), например, за счет того, что две сетки измерений перекрывают - по меньшей мере, частично - друг друга, или за счет того, что две сетки измерений имеют, по меньшей мер, одну общую контрольную точку.
Измерительный контактный датчик согласно настоящему изобретению используется, в частности, для определения поверхностных свойств боковых поверхностей зубьев зубчатых колес; при этом продольная ось измерительного контактного датчика направляется так, чтобы она перемещалась плоскостным образом по боковой поверхности зуба с целью определения фактически измеренных значений в пределах первой более грубой расчетной сетки и в пределах второй сетки с более мелкими ячейками.
Одно из преимуществ настоящего изобретения состоит в том, что оно позволяет быстро и надежно определить, например, волнистость боковых поверхностей зубьев.
Еще одно из преимуществ настоящего изобретения состоит в том, что, например, можно быстро оценить предполагаемый характер изменения шумовых характеристик зубчатых колес.
Еще одно из преимуществ настоящего изобретения состоит в том, что описываемый способ может быть также использован, например, для исследования трещинообразования, образования зерен и прочих явлений износа на боковых поверхностях зубьев зубчатых колес.
Во всех вариантах осуществления настоящего изобретения указанные первая и вторая сетки измерений, или же сетка измерений с локально увеличенной плотностью измерений, могут быть заданы на изображении, данном в сечении, и/или на проекции соответствующей боковой поверхности, или на реальной боковой поверхности.
Первая и/или вторая сетка измерений предпочтительно характеризуется правильной формой во всех вариантах осуществления настоящего изобретения; при этом указанная правильная форма может быть задана на изображении, данном в сечении, и/или на проекции боковой поверхности, и/или на реальной боковой поверхности.
Настоящее изобретение может быть реализовано с использованием одно-, двух- и трехмерных измерительных устройств.
Краткое описание фигур
Варианты осуществления настоящего изобретения подробно описаны ниже в привязке к чертежам, где:
На фиг. 1 представлено перспективное изображение устройства (в контексте настоящего документа в виде координатно-измерительной машины с ЧПУ (с числовым программным управлением) типа CNC), предназначенного для реализации способа согласно настоящему изобретению;
На фиг. 2А представлено схематическое изображение кольцевого зубчатого колеса в радиальном разрезе; при этом в области боковой поверхности зуба показана равномерная сетка (измерений);
На фиг. 2В представлено увеличенное изображение боковой поверхности зуба, показанной на фиг. 2А; при этом помимо равномерной сети (измерений) здесь также показан пример отпечатка контакта зуба;
На фиг. 2С представлен вид, показанный на фиг. 2В, где помимо сетки (измерений) и отпечатка контакта зуба показана критическая область, заданная более мелкой равномерной сеткой (измерений);
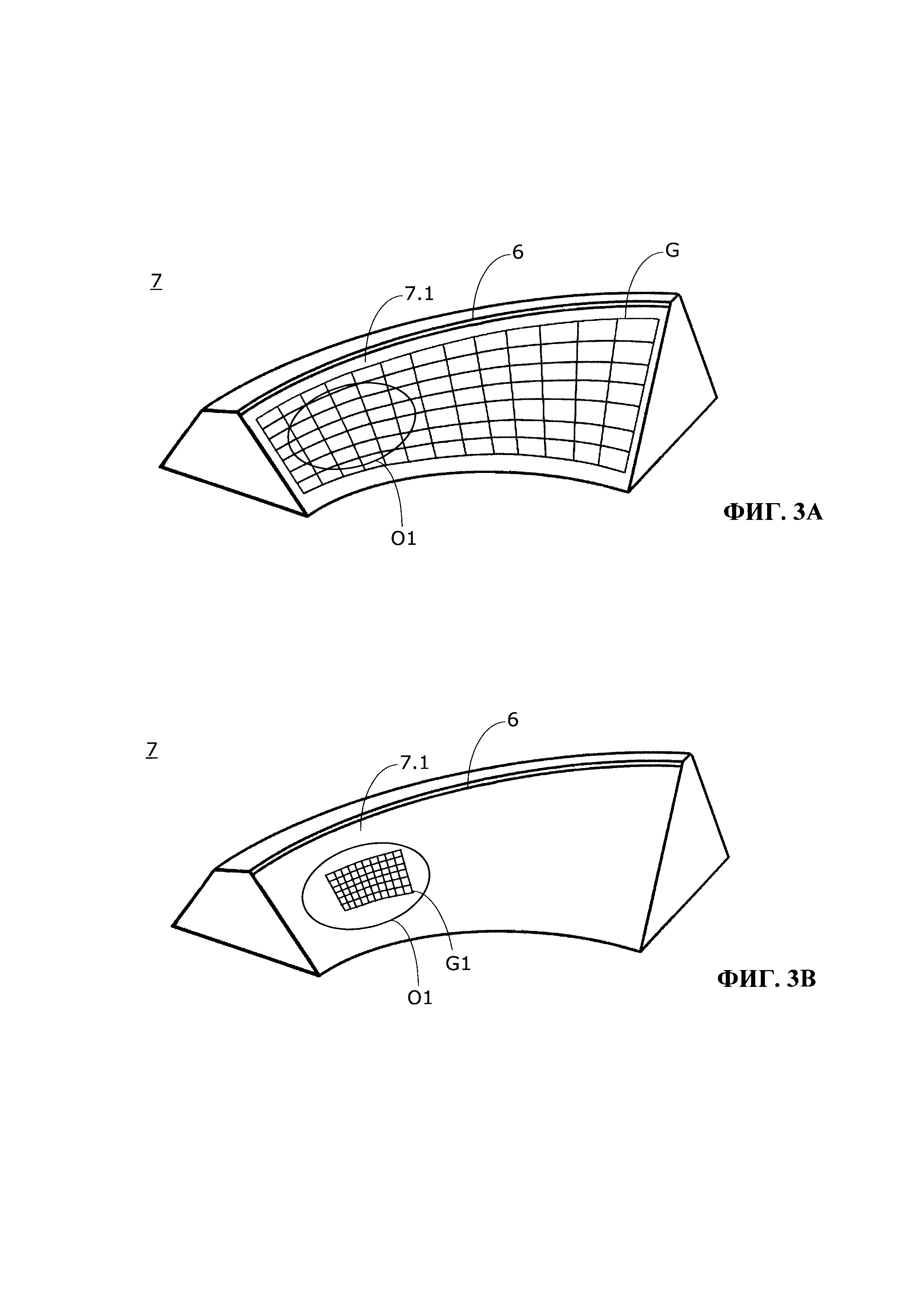
На фиг. 3А представлено схематическое перспективное изображение одного зуба конического зубчатого колеса; при этом на вогнутой боковой поверхности показан пример сетки (измерений);
На фиг. 3В представлено схематическое перспективное изображение зуба, показанного на фиг. 3А; при этом на вогнутой боковой поверхности в качестве примера показана сетка (измерений) с более мелкими ячейками;
На фиг. 3С представлено схематическое перспективное изображение одного зуба конического зубчатого колеса; при этом на вогнутой боковой поверхности показан пример сетки (измерений), которая характеризуется наличием первой области с более крупными ячейками (с более низкой разрешающей способностью) и второй области с более мелкими ячейками (с более высокой разрешающей способностью); при этом первая область сходится ко второй области, а вторая область - к первой;
На фиг. 4 показана схематическая конфигурация примера контактного датчика во время измерения боковой поверхности зуба вала-шестерни согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления настоящего изобретения
В рамках настоящего описания используются термины, которые также используются в соответствующих публикациях и патентах. Однако следует отметить, что использование этих терминов служит лишь для улучшения понимания. Сущность настоящего изобретения и объем правовой охраны формулы изобретения не должны толковаться в узком смысле за счет выбора конкретных терминов. Настоящее изобретение может быть без труда переведено в другие терминосистемы и/или области техники. Термины должны быть соответствующим образом применимы и к другим областям техники.
Помимо прочего, это касается геометрической формы (например, выпуклости) и свойств поверхности (например, волнистости) боковых поверхностей 7.1 зубьев. Термин «геометрическая форма» в значительной степени ограничен макроскопическим уровнем в рамках оценок конструкции. Термин «свойство поверхности» в значительной степени ограничен микроскопическим уровнем в рамках точечных или локальных оценок. Что касается свойств поверхности, то в контексте настоящего документа речь обычно идет о структурах, элементах и признаках боковой поверхности 7.1 зуба, протяженность которой варьируется в пределах от нанометрового диапазона до около 500 мкм.
В данном описании заготовки зубчатых колес, в общем, обозначены позицией 11. Если дается ссылка на конкретную заготовку зубчатого колеса, то указанная заготовка зубчатого колеса снабжается определенным индексом. Например, на фиг. 2А в качестве конкретной заготовки зубчатого колеса представлена заготовка 11.1 кольцевого зубчатого колеса. А на фиг. 4, например, в качестве конкретной заготовки зубчатого колеса показан вал-шестерня 11.2.
В данном случае рассматриваются способы измерений, в которых измерительный контактный датчик 3 непрерывно перемещается по замеряемой поверхности в контактном режиме, или в которых коммутирующий контактный датчик 3 входит в соприкосновение с поверхностью лишь точечно. Во всех вариантах осуществления настоящего изобретения в таком контактном датчике может быть необязательно предусмотрена или задана вибрация с целью повышения чувствительности измерения.
Таким образом, в отношении всех вариантов осуществления настоящего изобретения рассматривается контактный способ измерения, который также известен как способ измерения с помощью контактного датчика. Именно поэтому этот тип измерений также описывается в настоящем документе как контактное измерение. Контакт контактного датчика с поверхностью может быть точечным (например, в узловых точках равномерной и неравномерной сетки), или же он может осуществляться вдоль прямой линии (например, линии сетки), вдоль кривой или по ломаной траектории.
Для обеспечения измерения геометрической формы и поверхностных свойств боковых поверхностей 7.1 зубьев надежным, воспроизводимым и высокоточным образом заготовка 11.1 зубчатого колеса, показанная для примера на фиг. 2А, подвергается контактному измерению с использованием измерительного устройства 10, как это показано для примера на фиг.1. Дополнительные подробности такого измерения описаны также в привязке к фиг. 4. В рамках такого контактного измерения может быть предусмотрено выполнение, например, следующих стадий:
M1. Предварительное определение максимальной области Fmax, относящейся к боковой поверхности 7.1 зуба, как это показано для примера на фиг. 2В. Согласно настоящему изобретению максимальная область Fmax может быть определена заранее различными способами. Во всех вариантах осуществления настоящего изобретения предварительное определение максимальной области Fmax предпочтительно осуществляется с процессорной поддержкой. Соответствующие примеры приведены ниже.
а) При расчете зубчатого зацепления заготовки 11 зубчатого колеса расчетные данные измерений боковых поверхностей 7.1 зубьев заготовки 11 зубчатого колеса обычно определяются и сохраняются для последующего использования. Указанные расчетные данные измерений могут быть уже определены при расчете максимальной области Fmax боковых поверхностей 7.1 зубьев. В этом случае соответствующие параметры загружаются из памяти на стадии M1.
b) Максимальная область Fmax может быть определена или на стадии расчета, или до проведения контактного измерения. Это может быть сделано, например, путем ручного ввода углублений или кромок с использованием интерфейса пользователя (графического). С учетом примера, приведенного на фиг. 2В, следует иметь в виду, что максимальная область Fmax может быть задана, например, в виде прямоугольника. С краю боковой поверхности 7.1 зуба, показанной на фиг. 2В, можно видеть узкие граничные полоски, которые не лежат в области сетки G измерений. На фиг. 2В боковая поверхность 7.1 зуба в своей верхней части граничит с головкой 8.1 зуба, в нижней части - с основанием 8.2 зуба, слева - с наружным концом 8.3 зуба, а справа - с внутренним концом 8.4 зуба. Узкие граничные полоски или, соответственно, углубления могут быть заданы, например, в миллиметрах или процентах
c) В общем, максимальная область Fmax может быть также задана в виде полигонального ряда путем предварительного определения относительных или абсолютных величин.
М2. Предварительное определение критической области Fk, относящейся к боковой поверхности 7.1 зуба; при этом критическая область Fk полностью лежит в пределах максимальной области Fmax, как это показано для примера на фиг. 2С, или же критическая область Fk перекрывает максимальную область полностью или, по меньшей мере, частично. Как уже было указано, при использовании слова «критический» рассматривается область, которая представляет особый интерес в ходе проведения контактного измерения. Термин «критический» не следует понимать в узком смысле. Критическая область Fk представляет собой область, представляющую особый интерес. На фиг. 2А и 2В показан для примера отпечаток Т1 контакта боковой поверхности 7.1 зуба. Для обеспечения более детального исследования элемента в области указанного отпечатка Т1 контакта зуба критическая область Fk задается и располагается, например, таким образом, чтобы она включала в себя отпечаток Т1 контакта зуба. Согласно настоящему изобретению критическая область Fk может быть определена заранее различными способами. Во всех вариантах осуществления настоящего изобретения предварительное определение критической области Fk может предпочтительно осуществляться с процессорной поддержкой. Соответствующие примеры приведены ниже.
а) При расчете зубчатого зацепления заготовки 11 зубчатого колеса критическая область Fk может быть сохранена для последующего использования.
b) Для предварительного определения положения отпечатка Т1 контакта боковой поверхности 7.1 зуба может быть использовано, к примеру, моделирование. По результатам этого моделирования может быть определена критическая область Fk.
c) Можно также выполнить измерение динамических характеристик заготовки 11 зубчатого колеса, работающего в сопряжении с другим зубчатым колесом с тем, чтобы таким образом определить область, которая требует более тщательного исследования. В этом случае критическая область Fk затем задается так, чтобы она включала в себя область, требующую более точного исследования.
d) Критическая область Fk может быть также определена после томографического исследования боковой поверхности 7.1 зуба.
М3. Выполнение первых относительных перемещений коммутирующего или измерительного контактного датчика 3 измерительного устройства 10 с целью направления иглы, прижимного зонда или шарика контактного датчика 3 вдоль боковой поверхности 7.1 зуба таким образом, чтобы были получены фактически измеренные значения с первой разрешающей способностью для нескольких точек на боковой поверхности 7.1 зуба в пределах максимальной области Fmax. В случае с примерами, показанными на фиг. 2А-2С, первое контактное измерение проводится с помощью равномерной сетки G измерений с заданным количеством рядов ze=5 и столбцов s=9 максимальной области Fmax. В этом примере измеряемые значения соответственно определяются в точках пересечения (узловых точках) рядов и столбцов. Первая разрешающая способность в этом примере составляет 5×9 измеряемых значений в отношении поверхности Fmax.
Первое относительное перемещение может выполняться непрерывно во всех вариантах осуществления настоящего изобретения в том смысле, что измерительный контактный датчик 3 движется по боковой поверхности 7.1 зуба, последовательно проходя одну линию за другой в максимальной области Fmax. Это перемещение может необязательно сопровождаться вибрацией контактного датчика 3. Фактически измеренные значения могут детектироваться так, что, например, по мере прохождения соответствующих одинаковых расстояний текущие измеренные значения записываются в память. В альтернативном варианте измеренные значения могут детектироваться и сохраняться через равные интервалы времени (циклически) во время равномерного перемещения контактного датчика 3.
Однако во всех вариантах осуществления настоящего изобретения первое относительное перемещение может также выполняться дискретно в том смысле, что контактный датчик 3 направляется к каждой отдельной узловой точке сетки G для проведения в этой точке локального измерения. Выполнение дискретных измерений особенно подходит для коммутирующих контактных датчиков.
М4. Выполнение вторых относительных перемещений иглы, прижимного зонда или шарика 4 контактного датчика 3 измерительного устройства 10 (во всех вариантах осуществления настоящего изобретения может быть использована такой же контактный датчик 3, что и на стадии М3, но может быть также использована и второй контактный датчик) с целью направления контактного датчика 3 вдоль боковых поверхностей 7.1 зубьев таким образом, чтобы были получены фактически измеренные значения со второй разрешающей способностью для нескольких точек на боковых поверхностях 7.1 зубьев в пределах критической области Fk. Вторая разрешающая способность превышает первую разрешающую способность. Контактное измерение в критической области Fk может выполняться во всех вариантах осуществления настоящего изобретения непрерывным или дискретным образом, как уже было указано выше. В примерах, проиллюстрированных на фиг. 2А-2С, контактное измерение в критической области Fk выполняется с помощью более мелкой равномерной сетки G1 измерений, что предопределяет количество рядов ze=5 и количество столбцов s=9 для критической области Fk. Измеряемые значения в этом примере соответственно замеряются в точках пересечения рядов и столбцов. Вторая разрешающая способность в этом примере составляет 5×9 измеряемых значений в отношении поверхности Fk (например, вторая разрешающая способность может также характеризоваться значениями, отличными от значений первой разрешающей способности). Вторая разрешающая способность превышает первую, поскольку поверхность Fk меньше поверхности Fmax. Сетка G1 измерений, которая используется при измерении критической области Fk, во всех вариантах осуществления настоящего изобретения может пространственно совпадать с сеткой G измерений, как это показано на фиг.2С; при этом, например, по меньшей мере, один ряд ze сетки G совпадает с одним рядом ze сетки G1. Такая конфигурация обеспечивает преимущество, состоящее в том, что все фактически измеренные значения лежат в одной и той же эталонной системе координат. Если на стадии М4 используется сетка G1 измерений, которая не совпадает с сеткой G измерений, то выполняются вычислительные корректировки (например, путем координатного преобразования) с тем, чтобы увязать друг с другом фактически измеренные значения.
Способ согласно настоящему изобретению может быть реализован во всех вариантах его осуществления таким образом, что первое относительное перемещение переходит во второе относительное перемещение, а затем обратно в первое, как это описано ниже в привязке к фиг. 3С.
Способ согласно настоящему изобретению может быть реализован во всех вариантах его осуществления таким образом, что критическая область Fk исследуется как в рамках стадии М3, так и в рамках стадии М4.
Способ согласно настоящему изобретению, в общем, отличается тем, что относительные перемещения контактного датчика 3 измерительного устройства 10 осуществляются таким образом, что контактный датчик 3 направляется вдоль боковой поверхности 7.1 зуба; при этом во время совершения указанных относительных перемещений:

Во всех вариантах осуществления настоящего изобретения можно также ограничить контактное исследование с первой разрешающей способностью максимальной областью Fmax за пределами критической области Fk.
Способ согласно настоящему изобретению может быть реализован во всех вариантах его осуществления таким образом, что стадия М4 выполняется перед выполнением стадии М3.
Способ согласно настоящему изобретению может быть реализован во всех вариантах его осуществления таким образом, что стадии М3 и М4 частично выполняются одновременно. Если вторая линия (отходящая от головки 8.1 зуба) сетки G измерений, показанной на фиг. 2С зондируется с постоянной скоростью слева направо, то разрешающая способность в области Fk может быть увеличена за счет корректировки тактовой частоты считывания. В частности, в этом случая тактовая частота считывания удваивается с тем, чтобы получить фактически измеренные значения в промежуточных узловых точках сетки G1 измерений. В примере, приведенном на фиг. 2С, контактное измерение проводится еще раз вдоль всей самой нижней линии с разрешающей способностью сетки G.
Во всех вариантах осуществления настоящего изобретения критическая область Fk может, например, соответствовать области контакта боковой поверхности 7.1 зуба; или она может включать в себя область контакта боковой поверхности 7.1 зуба; или она может быть выведена по данным (например, полученным по итогам моделирования), относящимся к области контакта боковой поверхности 7.1 зуба.
Положение боковой поверхности 7.1 зуба может быть выведено, например, по расчетным данным, которые были определены на этапе проектирования заготовки 11 зубчатого колеса.
Положение области контакта на боковой поверхности 7.1 зуба может быть выведено, например, по записи данных; при этом выполняются корректировки смещения положения области контакта зуба, которые имеют место при нагружении заготовки 11 зубатого колеса, с целью выявления критической области Fk по соответственно скорректированным данным.
Положение критической области Fk на боковой поверхности 7.1 зуба может быть также определено, например, путем исследования динамических характеристик возбуждения при сопряжении заготовки 11 зубчатого колеса с другой заготовкой зубчатого колеса. Динамические характеристики возбуждения могут быть проанализированы путем моделирования и/или проведения измерения с целью последующего выявления одной или нескольких областей на боковой поверхности 7.1 зуба, которые следует исследовать более тщательно. Затем может быть определена критическая область Fk таким образом, чтобы она включала в себя эту область или области.
Критическая область Fk может быть определена во всех вариантах осуществления настоящего изобретения на базе вычислительного анализа контакта зубьев.
Критическая область Fk может быть также определена во всех вариантах осуществления настоящего изобретения по распространению линии контакта.
На фиг. 3А показано схематическое перспективное изображение отдельного зуба 7 заготовки 11 зубчатого колеса с винтовым зубчатым зацеплением; при этом указанный зуб 7, который проиллюстрирован в качестве примера, снабжен головной фаской 6 на вогнутой боковой поверхности 7.1. Головная фаска 6 показана почти в натуральную величину. Зуб 7 постепенно сужается от внешнего торца (в правой части изображения) к внутреннему торцу (в левой части изображения). Высота зуба на внешнем торце превышает высоту зуба на внутреннем торце.
Пример первой сетки G измерений показан на боковой поверхности 7.1, которая в этом случае состоит из рядов числом z=8 и столбцов числом s=14; при этом при замерах зубчатых колес чаще всего используются нечетные числа. На фиг. 3А показано, что указанная сетка G измерений была наложена на боковую поверхность 7.1 с отступом по всему ее периметру. В отличие от варранта, показанного на фиг. 2А-2С, где равномерные сетки G и G1 измерений были заданы в радиальной проекции, сетка G измерений, показанная на фиг. 3А, была задана на реальной исследуемой боковой поверхности как равномерная сетка G измерений.
На фиг. 3А критическая область Fk обозначена овалом O1. В этой критической области Fk боковая поверхность 7.1 характеризуется локальной неровностью поверхности. Эта неровность должна быть исследована особым образом в рамках измерения боковой поверхности 7.1. Именно поэтому вторая сетка G1 измерений задается таким образом, чтобы она обеспечивала получение информации о свойствах поверхности в критической области Fk. Вторая сетка G1 измерений показана в привязке к примеру, приведенному на фиг. 3В. В этом случае сетка G1 состоит из рядов числом z=7 и столбцов числом s=11. Вторая сетка G1 измерений лежит в пределах критической области Fk, которая на фиг. 3В также обозначена овалом O1.
Указанные выше сетки G и/или G1 измерений могут быть заданы во всех вариантах осуществления настоящего изобретения на основе проекции рассматриваемой боковой поверхности, или же они могут быть заданы на реальной исследуемой боковой поверхности.
Сетки G и/или G1 измерений предпочтительно имеют правильную форму во всех вариантах осуществления настоящего изобретения; при этом указанная правильная форма может быть задана в сечении, и/или в проекции боковой поверхности 7.1, и/или на реальной исследуемой боковой поверхности.
Сетки G и/или G1 измерений могут также характеризоваться неправильной формой с варьирующейся густотой ячеек во всех вариантах осуществления настоящего изобретения.
Во всех вариантах осуществления настоящего изобретения может быть также задана вторая сетка G1 измерений, представляющая собой часть первой сетки G измерений, но с локально повышенной густотой ячеек, как это показано для примера на фиг. 3С. При локальном увеличении густоты ячеек предпочтительно уменьшается или ширина столбцов, или ширина рядов (на фиг. 3С уменьшена ширина рядов). Преимущество такого варианта осуществления настоящего изобретения с уменьшенной шириной столбцов или рядов состоит в том, что между первой сеткой G и второй сеткой G1 обеспечивается автоматическая геометрически точная корреляция.
Согласно настоящему изобретению контактный датчик 3, представляющий собой шарик контактного датчика, как это показано на фиг. 4, перемещается по сканируемой поверхности (в данном случае по боковой поверхности 7.1). На фиг. 4 в качестве заготовки зубчатой передачи, обозначенной позицией 11.2, показан вал-шестерня с конической зубчатой передачей; при этом указанная заготовка 11.2 зубчатого колеса закреплена в вертикальном положении (как это показано на фиг. 1).
Во время проведения измерения вдоль сканируемой боковой поверхности 7.1 зуба шарик 4 контактного датчика выходит наружу или втягивается. Если, например, шарик 4 контактного датчика продвигается от основания 8.2 зуба в направлении головки 8.1 зуба 7, то контактный датчик 3 продвигается, например, за счет совмещенного выполнения двух линейных перемещений, в то время как заготовка 11 зубчатого колеса вращается в направлении против часовой стрелки, вследствие чего во время измерения шарик 4 контактного датчика всегда остается под постоянным углом к боковой поверхности 7.1. Вращение заготовки 11 зубчатого колеса обозначено на фиг. 1 стрелкой ω1. Ось вращения заготовки 11 зубчатого колеса (известная как ось вращения заготовки) обозначена на фиг. 1 и 4 позицией А1.
Шарик 4 контактного датчика в проиллюстрированном примере посажен на передний конец тонкого рабочего органа 5 контактного датчика, которое может быть подвижно закреплено на поворотной установке 1 измерительного устройства 10, как это показано на фиг. 1.
Способ согласно настоящему изобретению предпочтительно реализуется в измерительном устройстве 10, которое снабжено, по меньшей мере, одним контактным датчиком 3. Измерительное устройство 10 характеризуется наличием осей с числовым программным управлением, обеспечивающих перемещение контактного датчика 3 относительно боковой поверхности 7.1 зуба заготовки 11 зубчатого колеса. На фиг. 1 показано устройство ЧПУ, которое перемещает оси с числовым программным управлением и управляет их движением. Измерительное устройство 10 отличается тем, что способ согласно настоящему изобретению реализуется в устройстве ЧПУ. Способ согласно настоящему изобретению предпочтительно программируется в виде набора правил, которые могут загружаться и исполняться устройством ЧПУ.
Во время измерения, осуществляемого вдоль столбца s сетки G или G1, требуемое относительное перемещение может быть обеспечено, например, за счет вращения ω1 заготовки 11 зубчатого колеса, управляемого посредством числовых команд, а также, например, за счет линейного перемещения контактного датчика 3 параллельно осям Y и Z, также управляемого посредством числовых команд. Во время измерения, осуществляемого вдоль ряда ze сетки G или G1, требуемое относительное перемещение может быть также обеспечено за счет линейного перемещения контактного датчика 3, управляемого посредством числовых команд, в сочетании с вращением ω1 заготовки 11 зубчатого колеса, также управляемым посредством числовых команд. Если боковые поверхности 7.1 зубьев характеризуются сложной формой, как это показано на фиг.4, то необходимы совмещенные перемещения нескольких осей измерительного устройства 10. На фиг. 4 показано небольшой участок сетки измерений на боковой поверхности 7.1 зуба.
Реферат
Изобретение относится к измерению на одной боковой поверхности зуба заготовки зубчатого колеса. Сущность: способ проведения контактного измерения по меньшей мере на одной боковой поверхности (7.1) зуба заготовки (11) зубчатого колеса предусматривает выполнение следующих стадий: предварительное определение максимальной области, относящейся к боковой поверхности (7.1) зуба; предварительное определение критической области, относящейся к боковой поверхности (7.1) зуба; при этом критическая область перекрывает по меньшей мере частично максимальную область; выполнение относительных перемещений контактного датчика (3) измерительного устройства (10) с целью направления контактного датчика (3) вдоль боковой поверхности (7.1) зуба таким образом, чтобы были получены фактически измеренные значения с первой разрешающей способностью для нескольких точек на боковой поверхности (7.1) зуба в пределах максимальной области и чтобы были получены фактически измеренные значения со второй разрешающей способностью для нескольких точек на боковой поверхности (7.1) зуба в пределах критической области. При этом вторая разрешающая способность превышает первую разрешающую способность. Причем критическая область (Fk) соответствует области контакта боковой поверхности (7.1) зуба, или она включает в себя область контакта боковой поверхности (7.1) зуба, или она выводится по данным, касающимся области контакта боковой поверхности (7.1) зуба. 2 н. и 17 з.п. ф-лы, 4 ил.
Комментарии