Устройство определения положения и способ определения положения упаковочного материала с магнитной меткой - RU2394207C2
Код документа: RU2394207C2
Чертежи


















Описание
Область техники
Настоящее изобретение относится к устройству определения положения для определения положения упаковочного материала с магнитной меткой и к способу определения положения упаковочного материала с магнитной меткой.
Уровень техники, к которому относится изобретение
Известно, что магнитные датчики или чувствительные элементы можно использовать для определения и регистрации окружающих магнитных полей, а также известно, что магнитные метки, которые будут считываться магнитными датчиками, можно обеспечивать на носителе. Если магнитный датчик известного типа используют для определения магнитных меток, нанесенных, например, на ткань упаковочного материала, чтобы контролировать подачу этого материала или какую-либо другую рабочую операцию, то вскоре возникнут трудности, связанные с интерференцией сильных магнитных полей. К примеру, в упаковочных машинах уплотнения наносят зачастую с помощью индукционных катушек, в которых протекают довольно сильные токи и которые наводят сильные магнитные поля. Аналогично этому, в современных электрических устройствах существуют, например, электромоторы и трансформаторы, которые приводят к появлению существенных магнитных полей. В Европейском патенте №317879 описаны способ и устройство для подавления эффекта интерференции магнитных полей при определении магнитных ярлыков или меток, нанесенных на носители. Однако существует необходимость в улучшенном определении положения для определения положения упаковочного материала.
Сущность изобретения
Ввиду вышеизложенного, целью изобретения является устранение или, по меньшей мере, уменьшение описанных выше проблем. В частности, целью является обеспечение точного способа определения положения упаковочного материала.
Настоящее изобретение основано на понимании того, что сумма выходных сигналов от множества магнитных датчиков подразумевает подавление магнитной интерференции.
Согласно первому аспекту настоящего изобретения обеспечено устройство определения положения для определения положения упаковочного материала с магнитной меткой, содержащее сборку датчиков, состоящую из множества блоков магнитных датчиков, каждый из которых содержит выход, обеспечивающий выходной сигнал, в котором упомянутые блоки магнитных датчиков выполнены как минимум в двух парах блоков датчиков, блоки датчиков каждой пары выполнены с противоположными направлениями чувствительности, и упомянутые датчики выполнены с возможностью обнаружения магнитных меток упомянутого упаковочного материала; сборку обработки сигналов, соединенную с упомянутыми выходами упомянутых магнитных датчиков, содержащую объединитель, выполненный с возможностью объединения упомянутых выходных сигналов упомянутых датчиков в объединенный сигнал; и детектор, выполненный с возможностью определения упомянутого положения упомянутого упаковочного материала из упомянутого объединенного сигнала.
Преимущество этого устройства заключается в точности определения положения вне зависимости от интерференции магнитных полей, например, от других электронных устройств и вне зависимости от пыли, например, от упаковочного материала. Дополнительно, преимущество заключается в том, что нет необходимости в непосредственном контакте датчиков с упаковочным материалом. Дополнительно, преимущество заключается в простоте обработки сигнала.
Каждая пара блоков датчиков может содержать один блок магнитных датчиков, выполненный так, что во время работы находится ближе к упаковочному материалу, чем другой магнитный датчик из пары.
Блоки датчиков могут представлять собой мосты Уитстона, содержащие магниторезистивные датчики.
Детектор можно выполнять с возможностью определения положения посредством определения перехода через нуль объединенного сигнала.
Детектор может содержать средство для определения предварительно определенного уровня объединенного сигнала, который появляется перед переходом через нуль. Детектор может содержать средство для определения предварительно определенного изменения уровня объединенного сигнала перед переходом через нуль.
Эти признаки обеспечивают более точное определение перехода через нуль с помощью наблюдения, либо уровня, либо крутизны сигнала, либо обоих параметров. Эти признаки также способствуют более быстрому обнаружению, т.е. позволяют убирать или значительно сокращать задержку при определении выходного сигнала.
Устройство может дополнительно содержать первый блок магнитных компенсирующих датчиков, выполненный со своим направлением чувствительности, перпендикулярным направлениям чувствительности множества блоков магнитных датчиков, и второй блок магнитных компенсирующих датчиков, выполненный со своим направлением чувствительности, перпендикулярным направлениям чувствительности множества блоков магнитных датчиков и первого блока магнитных компенсирующих датчиков.
Сборку обработки сигналов можно соединять с первым и вторым блоками магнитных компенсирующих датчиков и выполнять с возможностью подавления компонентов сигналов от множества блоков магнитных датчиков, направленных перпендикулярно направлению чувствительности множества блоков магнитных датчиков.
Устройство определения положения может содержать средство регулировки упомянутых выходных сигналов упомянутых блоков магнитных датчиков.
Направления чувствительности блоков магнитных датчиков могут быть параллельными или антипараллельными соответственно магнитной ориентации упомянутой магнитной метки. В качестве альтернативы, направления чувствительности блоков магнитных датчиков могут быть перпендикулярными магнитной ориентации упомянутой магнитной метки.
Отношение между расстоянием между двумя блоками датчиков, обращенных к метке, и размером метки в направлении определения положения составляет величину между 0,6 и 3, предпочтительно между 0,7 и 1,8, предпочтительно между 0,85 и 1,4, и предпочтительно приблизительно 1.
Согласно второму аспекту настоящего изобретения предусмотрен способ определения положения упаковочного материала с магнитными метками, содержащий этапы: формирования множества сигналов датчиков, соответствующих магнетизму упомянутых магнитных меток, с помощью множества пар магнитных датчиков, каждая из которых содержит блоки магнитных датчиков, выполненные антипараллельно; объединения упомянутых сигналов датчиков в объединенный сигнал; определения положения на основании упомянутого объединенного сигнала.
Преимущество этого алгоритма по существу подобно преимуществу первого аспекта настоящего изобретения.
Этап определения положения может содержать этапы: определения перехода через нуль упомянутого объединенного сигнала; и определения упомянутого положения на основании упомянутого перехода через нуль.
Этот способ может дополнительно содержать этапы: формирования первого компенсирующего сигнала в зависимости от первой компоненты магнетизма в направлении, перпендикулярном упомянутым направлениям чувствительности упомянутой пары магнитных датчиков; формирования второго компенсирующего сигнала, в зависимости от второй компоненты магнетизма в направлении, перпендикулярном упомянутым направлениям чувствительности упомянутой пары магнитных датчиков и упомянутой первой компоненты магнетизма; и компенсирования поля упомянутых сигналов датчиков упомянутых пар магнитных датчиков для компонент магнетизма, перпендикулярных упомянутым направлениям чувствительности упомянутых пар магнитных датчиков, с помощью первого и второго компенсирующих сигналов.
Способ может дополнительно содержать этап регулирования выходных сигналов упомянутых магнитных датчиков.
В общем, все термины, используемые в формуле изобретения, необходимо понимать в их общепринятом значении в данной области техники, если это не оговорено отдельно. Все ссылки на “один/этот элемент, устройство, компонент, средство, этап и т.д.” следует интерпретировать как ссылки по меньшей мере на один пример упомянутого элемента, устройства, компонента, средства, этапа и т.д., если это не оговорено отдельно. Этапы любого способа, который здесь описан, не должны обязательно выполняться в порядке упоминания, если это не оговаривается особо.
Термин “магнетизм” следует понимать как какую-либо величину магнитного поля. Термин “магнитный датчик” следует интерпретировать как любое устройство, способное обнаруживать или измерять магнетизм. Термин “направление чувствительности” означает такое направление, в котором положительная величина магнетизма приводит к положительному электрическому выходному сигналу. Термин “пара блоков датчиков” следует истолковывать функционально, а не как указание на количество физических устройств.
Другие цели, признаки и преимущества настоящего изобретения станут ясны из последующего подробного описания, из зависимых пунктов прилагаемой формулы изобретения, а также из чертежей.
Краткое описание чертежей
Все вышеизложенное, а также дополнительные цели, признаки и преимущества настоящего изобретения будут лучше понятны при использовании следующего иллюстративного и неограничивающего подробного описания предпочтительных вариантов осуществления настоящего изобретения, приведенного со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции использованы для подобных элементов и на которых:
фиг.1 - блок-схема, схематично изображающая устройство определения положения согласно варианту осуществления настоящего изобретения;
фиг.2 - блок-схема, схематично изображающая устройство определения положения согласно варианту осуществления настоящего изобретения;
фиг.3 - схематичная диаграмма, изображающая расположение двух пар блоков датчиков согласно варианту осуществления настоящего изобретения;
фиг.4а-4е - графики сигналов, схематично изображающие синхронизацию сигналов, когда магнит или магнитная часть упаковочного материала проходит через блоки датчиков, в соответствии с устройством, изображенным на фиг.3;
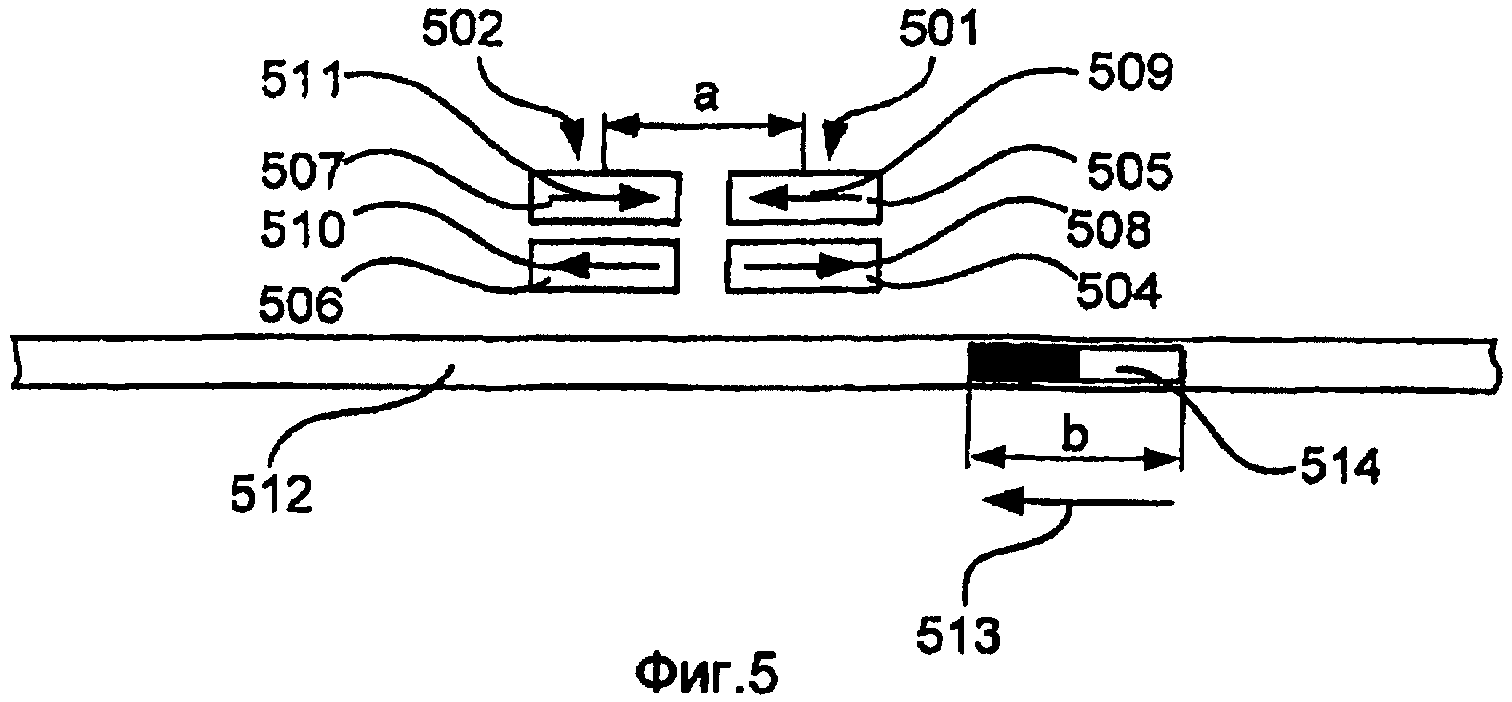
фиг.5 - схематичная диаграмма, иллюстрирующая расположение двух пар блоков датчиков согласно варианту осуществления настоящего изобретения;
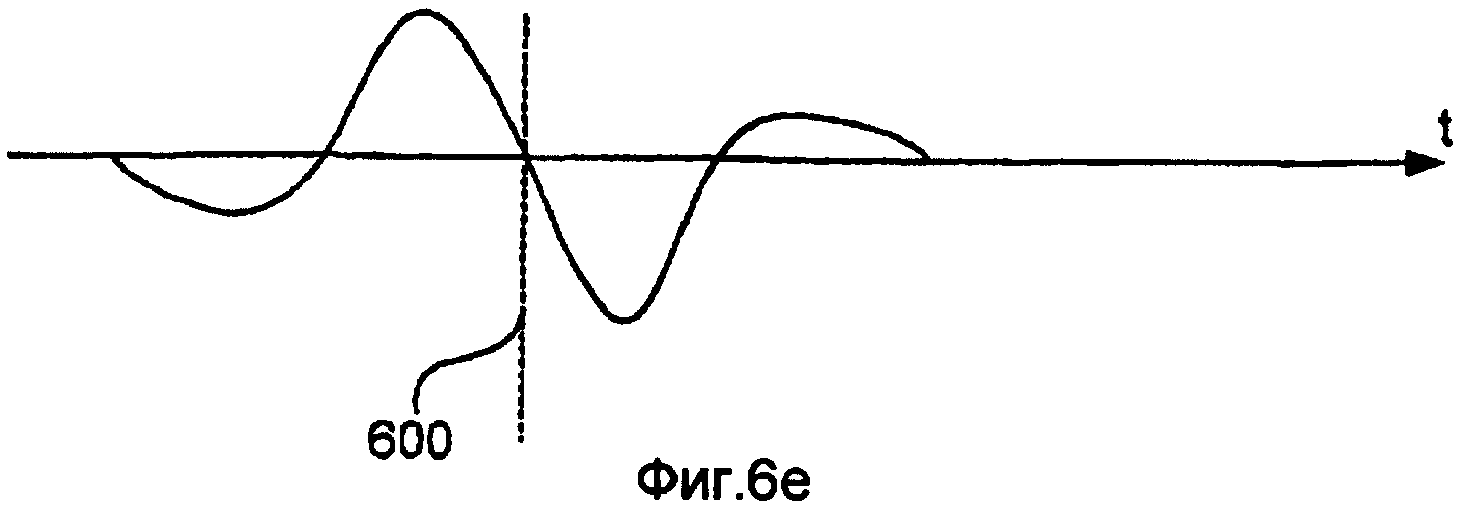
фиг.6а-6е - графики сигналов, иллюстрирующие синхронизацию, когда магнит или магнитная часть упаковочного материала проходит через блоки датчиков, в соответствии с устройством, изображенным на фиг.5;
фиг.7 - схематичная диаграмма, иллюстрирующая расположение двух пар блоков датчиков и компенсирующих датчиков согласно варианту осуществления настоящего изобретения;
фиг.8 - схематичная диаграмма, иллюстрирующая расположения двух пар блоков датчиков с общим датчиком согласно варианту осуществления настоящего изобретения;
фиг.9 - схематичное изображение схемы соединений устройства определения положения согласно варианту осуществления настоящего изобретения, изображенного на фиг.8;
фиг.10 - электрическая схема соединений блока магнитных датчиков согласно варианту осуществления настоящего изобретения;
фиг.11 - электрическая схема соединений сумматора согласно варианту осуществления настоящего изобретения;
фиг.12 схематично иллюстрирует смонтированную схему соединений двух блоков датчиков и сумматора согласно варианту осуществления настоящего изобретения;
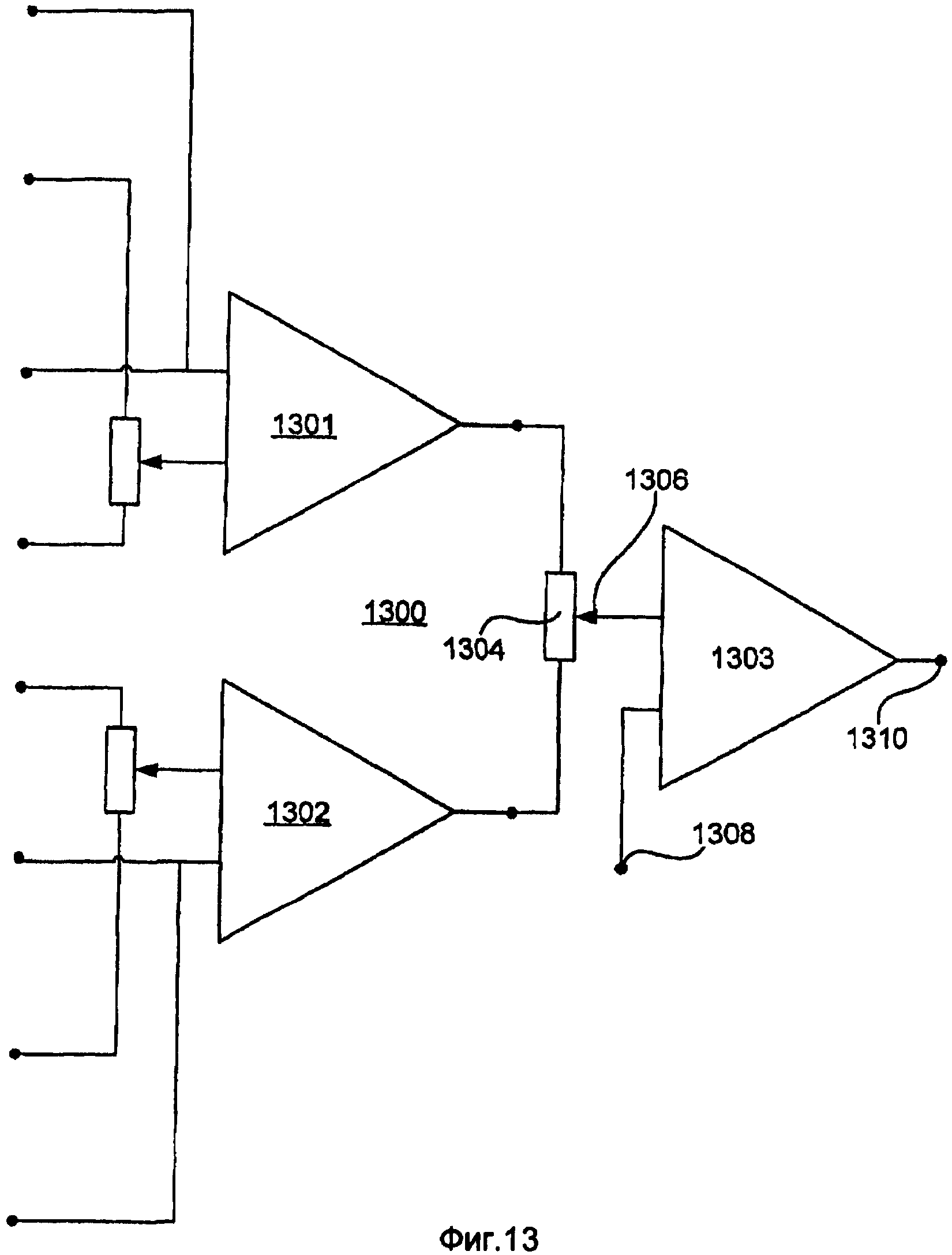
фиг.13 - схематичное изображение схемы соединений сумматора согласно варианту осуществления настоящего изобретения;
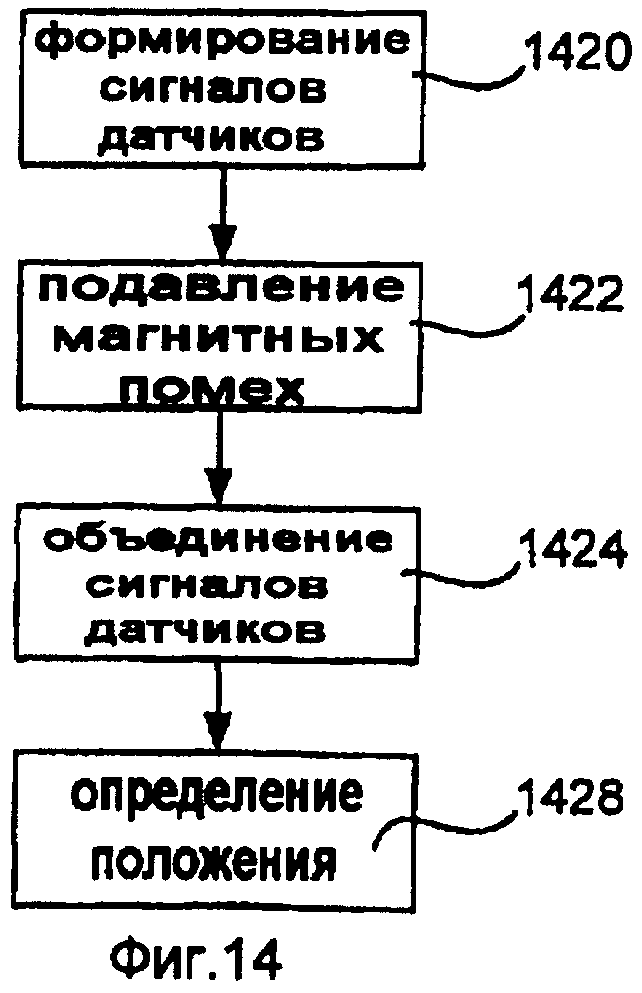
фиг.14 - блок-схема способа определения положения упаковочного материала с магнитными метками согласно варианту осуществления настоящего изобретения; и
фиг.15 - блок-схема способа определения положения упаковочного материала с магнитными метками согласно варианту осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления
Фиг.1 представляет структурную схему, схематично изображающую устройство 100 определения положения, выполненное с возможностью определения положения упаковочного материала (не показан) при помощи определения времени, когда магнитная метка, выполненная на упаковочном материале, в нем или с помощью него (проходит через устройство 100). Устройство 100 содержит множество датчиков 102, которые обеспечивают выходные сигналы, в ответ на магнетизм магнита или магнитного материала. Выходные сигналы объединяются в средстве 104 обработки сигналов для образования объединенного сигнала, который поступает на детектор 106. Детектор 106 на основании объединенного сигнала определяет положение магнитной метки.
Фиг.2 представляет структурную схему, схематично изображающую устройство 200 определения положения, выполненное с возможностью определения положения упаковочного материала (не показан) при помощи определения времени, когда магнитная метка, выполненная на упаковочном материале, в нем или с помощью него, или магнитная часть материала, проходит через устройство 200. Устройство 200 определения положения содержит источник 202 питания для обеспечения электрической энергией для электрических схем устройства 200. Устройство 200 содержит множество блоков 204, 205, 206, 207 магнитных датчиков, выполненных попарно 208, 209. В каждой паре 208, 209 один блок 204, 206 магнитных датчиков выполнен со своим направлением чувствительности в одном направлении, а другой блок 205, 207 магнитных датчиков выполнен со своим направлением чувствительности в противоположном направлении, т.е. магнитные датчики 204, 205, 206, 207 пары выполнены антипараллельно. Под направлением чувствительности следует понимать отношение между полярностью выходного сигнала и направлением магнетизма, т.е. магнитного поля или магнитного потока. Выходные сигналы блоков 204, 205, 206, 207 магнитных датчиков объединяются в одной или более схемах 210, 211, 212 сумматоров для формирования объединенного сигнала выходных сигналов датчиков. Объединенный сигнал анализируется в детекторе 214, выполненном для определения некоторой вполне определенной точки объединенного сигнала. Вполне определенной точкой объединенного сигнала может быть центральный переход через нуль объединенного сигнала.
Фиг.3 представляет схематичную диаграмму, изображающую расположение двух пар 301, 302 блоков датчиков, каждая из которых содержит два блока 304, 305; 306, 307 датчиков с антипараллельными направлениями 308, 309; 310, 311 чувствительности, согласно варианту осуществления настоящего изобретения, и часть упаковочного материала 312, здесь перемещающегося справа налево, как обозначено стрелкой 313, с магнитом 314, выполненным в материале. Для получения выходных сигналов от датчиков 304-307, которые при объединении обеспечивают объединенный сигнал, из которого можно определять легко обнаруживаемый и вполне определенный переход через нуль, расстояние «а», на которое пара датчиков разнесена в устройстве, по существу равно размеру «b» магнитной метки, взятому в направлении, в котором магнитная метка открыта для датчиков, т.е. в направлении определения положения. Здесь, расстояние «а» равно расстоянию между центром устройства датчиков и центром внешнего блока 304 датчиков, так как эмпирически было найдено, что именно это расстояние является наиболее эффективным. Это обеспечивает совпадающие выходные сигналы датчиков, когда магнитные метки будут рядом с датчиками. Отношение a/b между расстоянием «а» датчиков пары и размером «b» магнитной метки предпочтительно находится между 0,6 и 3, более предпочтительно, между 0,7 и 1,8, еще более предпочтительно, между 0,85 и 1,4, и наиболее предпочтительно, составляет приблизительно 1.
Фиг.4а-4е представляют графики сигналов, изображающие синхронизацию сигналов, когда магнит или магнитная часть упаковочного материала проходит через блоки датчиков в соответствии с устройством, изображенным на фиг.3. Фиг.4а иллюстрирует выходной сигнал первого блока датчиков первой пары блоков датчиков, когда проходит магнит. Поскольку магнитное поле совпадает с направлением чувствительности блока датчиков, полярность выходного сигнала будет положительной, а интенсивность будет возрастать по мере приближения магнита. Во время прохождения магнита выходной сигнал уменьшается, поскольку компонента магнитного поля в направлении чувствительности уменьшается, изменяя полярность, когда компонента магнитного поля в направлении чувствительности становится отрицательной. Когда магнит проходит, выходной сигнал постепенно уменьшается до нуля. Фиг.4b иллюстрирует выходной сигнал второго блока датчиков первой пары блоков датчиков, когда проходит магнит. По сравнению с выходным сигналом от первого блока датчиков пары, изображенной на фиг.4а, выходной сигнал имеет противоположную полярность из-за антипараллельного расположения, и он имеет сдвиг по времени из-за расположения второго блока датчиков рядом с первым блоком датчиков. Помехи от более удаленных источников магнитных полей, по сравнению с расстоянием до метки, таких как электронные устройства, линии электропередач и т.д., будут вносить незначительный вклад в объединенный сигнал, когда выходные сигналы от двух блоков датчиков пары объединены, поскольку они имеют противоположные направления чувствительности и выполнены близко друг к другу, т.е. испытывают равные помехи. Таким образом происходит подавление помех. Для ясности отметим, что на графиках сигналов какие-либо помехи не показаны, поскольку они могут затруднять понимание принципа объединения выходных сигналов.
Подобно фиг.4а и 4b для первой пары блоков датчиков, фиг.4с и 4d иллюстрируют выходные сигналы второй пары блоков датчиков, изображенных на фиг.3. Фиг.4с иллюстрирует выходной сигнал первого блока датчиков второй пары, который из-за его направления чувствительности имеет форму и полярность, подобную выходному сигналу второго датчика первой пары, и, из-за положения, близкого ко второму датчику первой пары, в котором выполнен блок датчиков, имеет только небольшой сдвиг по времени, который обозначен на фиг.4с как нулевой сдвиг по времени. Выходной сигнал второго блока датчиков второй пары, как изображено на фиг.4d, имеет подобную форму, но дополнительно смещен по времени, а полярность подобна выходному сигналу первого датчика первой пары, из-за его параллельного направления чувствительности. Объединенный сигнал, содержащий объединенные выходные сигналы от блоков датчиков, изображен на фиг.4е. Положение определяется из объединенного сигнала с помощью определения перехода 400 через нуль, как будет описано ниже.
На фиг.5 представлена схематичная диаграмма, иллюстрирующая расположение двух пар 501, 502 блоков датчиков, каждая из которых содержит два блока 504, 505; 506, 507 датчиков с антипараллельными направлениями 508, 509; 510, 511 чувствительности, согласно варианту осуществления настоящего изобретения, и часть упаковочного материала 512, здесь перемещающуюся справа налево, как показано стрелкой 513, с магнитом 514, выполненным в материале. Для достижения выходных сигналов от датчиков 504-507, которые при объединении обеспечивают объединенный сигнал, из которого можно определять легко обнаруживаемый и вполне определенный переход через нуль, расстояние «а», на которое пара датчиков разнесена в устройстве, по существу равно размеру «b» магнитной метки, взятому в направлении, в котором магнитная метка открыта для датчиков. Это обеспечивает совпадающие выходные сигналы датчиков, когда магнитные метки находятся рядом с датчиками. Отношение a/b между расстоянием «а» датчиков пары и размером «b» магнитной метки предпочтительно находится между 0,6 и 3, более предпочтительно, между 0,7 и 1,8, еще более предпочтительно, между 0,85 и 1,4, и наиболее предпочтительно, составляет приблизительно 1.
Фиг.6а-6е изображают графики сигналов, иллюстрирующие синхронизацию сигналов, когда магнит или магнитная часть упаковочного материала проходит через блоки датчиков, в соответствии с устройством, изображенным на фиг.5. Фиг.6а иллюстрирует выходной сигнал первого блока датчиков первой пары блоков датчиков, когда он проходит через магнит. Поскольку направление магнитного поля противоположно направлению чувствительности первого блока датчиков, выходной сигнал имеет отрицательную полярность и уменьшается по мере приближения магнита. Когда метка находится на одной линии с блоком датчиков, выходной сигнал возрастает, поскольку компонента магнитного поля в направлении чувствительности приблизительно следует за линиями магнитного поля магнита. Когда магнит проходит, выходной сигнал уменьшается до нуля, затем становится отрицательным, когда магнит проходит через блок датчиков, и в заключении затухает до нуля, когда магнит будет достаточно далеко. Фиг.6b иллюстрирует выходной сигнал второго блока датчиков первой пары блоков датчиков, когда магнит проходит через них. По сравнению с выходным сигналом первого блока датчиков пары, изображенной на фиг.6а, выходной сигнал имеет другую полярность из-за антипараллельного расположения и имеет меньшее абсолютное значение из-за расположения второго блока датчиков дальше от метки, чем первый блок датчиков. Помехи от более удаленных, по сравнению с расстоянием до магнитной метки, источников магнитных полей, таких как электрические машины, линии электропередачи т.д., будут вносить незначительный вклад в объединенный сигнал, когда выходные сигналы от двух блоков датчиков пары объединятся, поскольку они имеют противоположные направления чувствительности и выполнены близко друг к другу, т.е. испытывают равные помехи. Таким образом, происходит подавление помех. Для ясности отметим, что помехи на графике сигналов не показаны, поскольку они могут затруднять понимание принципа объединения выходных сигналов.
Подобно фиг.6а и 6b для первой пары блоков датчиков, фиг.6с и 6d иллюстрируют выходные сигналы второй пары блоков датчиков, изображенной на фиг.5. Фиг.6с иллюстрирует выходной сигнал первого блока датчиков второй пары, который имеет подобную форму, но из-за своего направления чувствительности имеет полярность, противоположную выходному сигналу первого датчика первой пары, и благодаря расположению, в котором предусмотрен блок датчиков, смещен по времени. Выходной сигнал второго блока датчиков второй пары, как изображено на фиг.6d, подобен по форме, но дополнительно имеет противоположную полярность, и с меньшим абсолютным значением, подобным выходному сигналу второго датчика первой пары из-за своего расстояния до метки. Объединенный сигнал, содержащий объединенные выходные сигналы блоков датчиков, показан на фиг.6е. Положение определяется из объединенного сигнала с помощью определения центрального перехода 600 через нуль.
Фиг.7 является схематичным изображением, иллюстрирующим расположение двух пар 701, 702 блоков датчиков, каждая из которых содержит два блока 704, 705; 706, 707 датчиков с антиполярными направлениями 708, 709; 710, 711 чувствительности, согласно варианту осуществления настоящего изобретения, и часть упаковочного материала 712, здесь перемещающуюся справа налево, как показано стрелкой 713, с магнитом 714, выполненным в материале. На фиг.7 один из блоков 705 датчиков изображен под небольшим углом «α», т.е. не совсем параллелен другому датчику 704 пары 702 блоков датчиков. Это приводит к тому, что блок 705 датчиков обеспечивает сигнал с меньшим подавлением шума согласно принципу пары датчиков. Для компенсации этого эффекта первый компенсирующий блок 716 магнитных датчиков выполнен со своим направлением 717 чувствительности, перпендикулярным основному направлению блоков 704, 705, 706, 707 датчиков пары 701, 702 блоков датчиков; а второй компенсирующий блок 718 магнитных датчиков выполнен со своим направлением 719 чувствительности, перпендикулярным основному направлению блоков 704, 705, 706, 707 датчиков пары 701, 702 блоков датчиков и компенсирующему блоку 716 магнитных датчиков. Добавляя или вычитая значения, принимаемые компенсирующими блоками 716, 718, можно компенсировать какие-либо угловые отклонения блоков 704, 705, 706, 707 датчиков пары 701, 702 блоков датчиков.
Фиг.8 является схематичным изображением, иллюстрирующим расположение двух пар 801 и 802 блоков датчиков, имеющих один общий блок 805 датчиков, и, таким образом, каждая пара содержит “два” блока 804, 805; 805, 807 датчиков с антипараллельными направлениями 808, 809; 809, 811 чувствительности, согласно варианту осуществления настоящего изобретения, и часть упаковочного материала 812, здесь перемещающуюся справа налево, как показано стрелкой 813, с магнитом 814, выполненным в материале. Для получения выходных сигналов от датчиков 804-807, которые при объединении обеспечивают объединенный сигнал, из которого можно определять легко обнаруживаемый и вполне определенный переход через нуль, расстояние «а», на которое пара датчиков разнесена, по существу равно размеру «b» магнитной метки, взятому в направлении, в котором магнитная метка открыта для датчиков. Это обеспечивает совпадающие выходные сигналы датчиков, когда магнитная метка находится рядом с датчиками. Отношение a/b между расстоянием «а» датчиков пары и размером «b» магнитной метки предпочтительно находится между 0,6 и 3, более предпочтительно, между 0,7 и 1,8, еще более предпочтительно, между 0,85 и 1,4 и наиболее предпочтительно, составляет приблизительно 1.
Фиг.9 схематично иллюстрирует соединения сборки 900 согласно варианту осуществления, показанному на фиг.8. Сборка содержит первую пару 902 датчиков и вторую пару 904 датчиков, в которых первая пара датчиков содержит датчики 906 и 907, а вторая пара 904 датчиков содержит датчики 907 и 908, т.е. пары 902 и 904 датчиков имеют общий датчик 907. Сигналы от первой пары 902 датчиков, т.е. сигналы от датчиков 906 и 907, объединяются в первом средстве 910 объединения. Сигналы от второй пары 904 датчиков, т.е. сигналы от датчиков 907 и 908, объединяются во втором средстве 912 объединения. Объединенные сигналы от первого и второго средств 910, 912 объединения объединяются в третьем средстве 914 объединения для обеспечения объединенного сигнала, на основании которого детектор 916 может определять положение магнитной метки.
На фиг.10 изображена электрическая схема соединений блока 1000 магнитных датчиков согласно варианту осуществления настоящего изобретения. Блок 1000 датчиков содержит четыре магнитных датчика 1002, 1003, 1004 и 1005, которые соединены в виде моста 1006 Уитстона. На входные клеммы 1008 и 1009 моста 1006 подается напряжение возбуждения или ток возбуждения, в зависимости от типа магнитных датчиков 1002, 1003, 1004, 1005. Магнитными датчиками 1002, 1003, 1004, 1005 могут быть магниторезисторы, датчики Холла или индуктивные датчики. Выходной сигнал блока 1000 датчиков подается на выходные клеммы 1010 и 1011.
Согласно варианту осуществления настоящего изобретения блок датчиков может содержать один магнитный датчик. Магнитным датчиком может быть магниторезистор, датчик Холла или индуктивный датчик.
На фиг.11 изображена электрическая схема 1100 соединений сумматора согласно варианту осуществления настоящего изобретения, выполненная с возможностью объединения выходных сигналов от двух блоков датчиков. Выходные сигналы от первого блока датчиков поступают на входные клеммы 1102, 1104 схемы 1100 сумматора, а выходные сигналы от второго блока датчиков поступают на входные клеммы 1106, 1108 схемы 1100 сумматора. В качестве делителя переменного напряжения можно использовать потенциометр 1110, подсоединенный между клеммами 1102 и 1106, каждая из которых подсоединена к одному блоку датчиков. Потенциометр 1110 используют для выравнивания входных сигналов двух датчиков. Скользящий контакт потенциометра подключен ко входу усилителя 1112, например операционного усилителя. Другой вход усилителя соединен с входными клеммами 1104, 1108, каждая из которых соединена с одним датчиком. Предпочтительно, чтобы каскад усилителя имел резистор 1114 обратной связи для управления усилением. На выходную клемму 1116 подается объединенный сигнал от блоков датчиков.
Фиг.12 схематично иллюстрирует скомпонованную схему соединений двух блоков 1201, 1202 датчиков и сумматора 1203.
На фиг.13 изображена электрическая схема 1300 соединений сумматора, содержащая первый сумматор 1301 и второй сумматор 1302, каждый из которых подключен к двум блокам датчиков (не показаны), и третий сумматор 1303, подсоединенный к упомянутым первому и второму сумматорам. В качестве делителя напряжения можно использовать потенциометр 1304, подсоединенный между выходными клеммами первого и второго сумматоров 1301, 1302. Потенциометр 1304 используют для выравнивания сигналов от первого и второго сумматоров 1301, 1302. Скользящий контакт 1306 потенциометра 1304 подсоединен ко входу сумматора 1303. Другой вход 1308 сумматора 1303 соединен или с генератором нулевого потенциала (не показан), или с заземлением. На выходную клемму 1310 подается объединенный сигнал от блоков датчиков.
Фиг.14 представляет блок-схему способа определения положения упаковочного материала с магнитными метками согласно варианту осуществления настоящего изобретения. На этапе 1420 формирования сигнала датчика множество сигналов датчиков реагируют на магнетизм, т.е. на магнитное поле или магнитный поток, от магнитных меток упомянутого упаковочного материала. Сигналы датчиков генерируются множеством блоков магнитных датчиков, причем каждый из них содержит пару антипараллельных датчиков, расположенных близко друг к другу. На этапе 1422 подавления магнитных помех магнитные помехи от магнитных источников, расположенных на удалении по сравнению с расстоянием до метки, подавляются посредством объединения сигналов датчиков каждого из датчиков пары датчиков. Таким образом, с помощью антипараллельного расположения происходит подавление помех от источников, находящихся на удалении. На этапе 1424 объединения сигналов датчиков все сигналы датчиков от пар датчиков объединяются для образования объединенного сигнала. На этапе 1428 определения положения на основании объединенного сигнала определяется положение.
Фиг.15 представляет блок-схему способа определения положения упаковочного материала с магнитными метками согласно варианту осуществления настоящего изобретения. На этапе 1500 формирования сигнала датчика множество сигналов датчиков реагируют на магнетизм, т.е. магнитное поле или магнитный поток, производимый от магнитных меток упомянутого упаковочного материала. Сигналы датчиков генерируются множеством блоков магнитных датчиков, причем каждый из них содержит пару антипараллельных датчиков, расположенных близко друг к другу. На этап 1501 корректировки сигналов датчиков сигналы от блоков датчиков корректируются для балансирования, т.е. уровень сигналов равен центральному уровню магнитного воздействия. На этапе 1502 подавления магнитных помех магнитные помехи от магнитных источников, расположенных на удалении по сравнению с расстоянием до метки, подавляются благодаря объединению сигналов от каждого из датчиков пары датчиков. Таким образом, с помощью антипараллельного расположения происходит подавление помех от источников, находящихся на удалении. На этапе 1503 компенсирования сигналы датчиков регулируются в том случае, если направление чувствительности какого-либо из блоков датчиков не выровнено. Это может быть в том случае, когда какой-либо датчик не находится на одной линии с другими датчиками. Этап 1503 компенсирования выполняют с помощью определения магнетизма в первом перпендикулярном направлении, т.е. перпендикулярном предназначенному направлению чувствительности датчиков пары датчиков, и во втором перпендикулярном направлении, т.е. перпендикулярном предназначенному направлению чувствительности датчиков пары датчиков и первому перпендикулярному направлению. Затем сигналы датчиков можно компенсировать для магнетизма в первом и втором перпендикулярных направлениях. На этапе 1504 объединения сигналов датчиков все сигналы датчиков от пары датчиков объединяются для образования объединенного сигнала. На этапе 1506 определения перехода через нуль определяется переход через нуль объединенных сигналов. Под “нулем” подразумевается некоторый предварительно определенный уровень, который может соответствовать потенциалу земли, или значению, генерируемому генератором нулевого потенциала. На этапе 1508 определения положения определяется положение на основании определенной синхронизации перехода через нуль.
Таким образом, можно обеспечивать обнаружение положения упаковочного материала при изготовлении упаковочного материала, например, для печати, при изготовлении пакетов упаковочного материала, например, для нанесения печатного текста и изображений, отверстий и т.д., для корректирования в упаковочной машине, при транспортировке изготовленных пакетов, например, для прикрепления закрывающих и открывающих устройств, этикеток и т.д. Изобретение позволяет синхронизировать подобные операции с высокой точностью. Кроме того, какие-либо из описанных выше признаков вариантов осуществления можно использовать в комбинации.
Изобретение было описано выше главным образом со ссылкой на некоторые варианты осуществления. Однако специалисты в данной области техники легко оценят, что можно использовать другие варианты осуществления, отличающиеся от вариантов осуществления, описанных выше, в равной степени находящиеся в рамках объема данного изобретения, как это описано в прилагаемой формуле изобретения.
Реферат
Сущность: устройство содержит сборку датчиков, состоящую из множества блоков магнитных датчиков, первый и второй компенсирующие блоки магнитных датчиков, сборку обработки сигнала, подсоединенную к выходам магнитных датчиков, и детектор. Блоки магнитных датчиков выполнены по меньшей мере в двух парах. Блоки датчиков каждой пары имеют противоположные направления чувствительности. Первый компенсирующий блок магнитных датчиков выполнен с направлением чувствительности, перпендикулярным направлениям множества блоков магнитных датчиков. Второй компенсирующий блок магнитных датчиков выполнен с направлением чувствительности, перпендикулярным направлениям множества блоков магнитных датчиков и первого компенсирующего блока датчиков. Сборка обработки сигнала содержит объединитель, выполненный с возможностью объединения выходных сигналов датчиков в объединенный сигнал. Детектор выполнен с возможностью определения положения материала на основании объединенного сигнала. Способ заключается в формировании множества сигналов датчиков от магнитных меток упаковочного материала, объединении сигналов датчиков в объединенный сигнал и определении положения на основании объединенного сигнала, в частности, при переходе его через нуль. Технический результат - повышение точности. 2 н. и 11 з.п. ф-лы, 23 ил.
Формула
сборку датчиков, содержащую множество блоков (102, 204, 205, 206, 207, 304, 305, 306, 307, 504, 505, 506, 507, 704, 705, 706, 707, 804, 805, 806, 807, 906, 907, 908, 1000, 1201, 1202) магнитных датчиков, каждый из которых содержит выход, обеспечивающий выходной сигнал, в котором упомянутые блоки магнитных датчиков расположены по меньшей мере в двух парах (208, 209, 301, 302, 501, 502, 701, 702) блоков датчиков, причем блоки датчиков каждой пары выполнены с противоположными направлениями (308, 309, 310, 311, 508, 509, 510, 511, 708, 709, 710, 711, 808, 809, 811) чувствительности, и упомянутые блоки датчиков выполнены таким образом, чтобы обнаруживать магнитные метки упомянутого упаковочного материала,
сборку (104) обработки сигнала, подключенную к упомянутым выходам упомянутых магнитных датчиков, содержащую объединитель (210, 211, 212, 910, 912, 914, 1100, 1203, 1301, 1302, 1303), выполненный с возможностью объединения упомянутых выходных сигналов указанных блоков магнитных датчиков в объединенный сигнал, и
детектор (106, 214, 916), выполненный с возможностью обнаружения упомянутого положения упомянутого упаковочного материала на основании упомянутого объединенного сигнала,
первый компенсирующий блок (716) магнитных датчиков, выполненный со своим направлением (717) чувствительности, перпендикулярным упомянутым направлениям чувствительности упомянутого множества блоков магнитных датчиков, и второй компенсирующий блок (718) магнитных датчиков, выполненный со своим направлением (719) чувствительности, перпендикулярным упомянутым направлениям чувствительности упомянутого множества блоков магнитных датчиков и упомянутого первого компенсирующего блока датчиков,
при этом упомянутая сборка обработки сигнала подсоединена к упомянутым первому и второму компенсирующим блокам магнитных датчиков и выполнена для подавления компонент сигналов от упомянутого множества блоков магнитных датчиков, расположенных перпендикулярно упомянутому направлению чувствительности упомянутого множества блоков магнитных датчиков.
формирования множества сигналов датчиков в ответ на магнитное поле упомянутых магнитных меток с помощью множества пар магнитных датчиков, причем каждая пара содержит блоки магнитных датчиков, расположенные антипараллельно,
объединения упомянутых сигналов датчиков в объединенный сигнал, и
обнаружения положения на основании упомянутого объединенного сигнала,
формирования первого компенсирующего сигнала в зависимости от первой компоненты магнитного поля в направлении, перпендикулярном упомянутым направлениям чувствительности упомянутых пар магнитных датчиков,
формирования второго компенсирующего сигнала в зависимости от второй компоненты магнитного поля в направлении, перпендикулярном упомянутым направлениям чувствительности упомянутых пар магнитных датчиков и упомянутой первой компоненты магнитного поля, и
компенсации поля упомянутых сигналов датчиков упомянутых пар магнитных датчиков для компонент магнитного поля, перпендикулярных упомянутым направлениям чувствительности упомянутых пар магнитных датчиков на основании упомянутых первого и второго компенсирующих сигналов.
обнаружения перехода через нуль упомянутого объединенного сигнала, и
определения упомянутого положения на основании упомянутого перехода через нуль.
Документы, цитированные в отчёте о поиске
Пространственный магнитный опрос
Комментарии