Комбинированный позиционирующий датчик перемещения электромагнитно-индукционного типа - RU2759209C1
Код документа: RU2759209C1
Чертежи













Описание
Область техники
Изобретение относится к технологии измерения смещения с использованием электромагнитной индукции, в частности к комбинированному позиционирующему датчику перемещения электромагнитно-индукционного типа. Уровень техники
С целью преодоления недостатков емкостных датчиков перемещения, чувствительных к таким факторам, как грязь и влажность, были созданы датчики перемещения электромагнитно-индукционного типа.
В патенте US5804963 раскрыт датчик смещения с инкрементальной электромагнитной индукцией, который завершает измерение смещения, приводя в действие три группы индукционных обмоток в цикле и принимая сигналы от двух групп индукционных обмоток, которые эквивалентно ортогональны той, которая приводится в действие. Патент CN100491896C улучшает структуру индуктирующей обмотки и индукционной обмотки в US5804963, так что индуктирующий проводник (обмотка) и индукционный проводник (обмотка) не используются совместно, а устанавливаются отдельно, чтобы уменьшить прямую связь между ними, при этом метод измерения остается неизменным. Инкрементальное измерение легко реализовать, однако оно должно работать непрерывно, чтобы накапливать приращение смещения в реальном времени, поэтому рабочий ток относительно велик.
Патент US5886519 раскрывает датчик смещения с электромагнитной индукцией абсолютного положения, который выводит результаты измерения путем последовательного измерения пространственной фазы измеренного положения на множестве различных длин волн. Для получения пространственной фазы измеренного положения на определенной длине волны, во-первых, передающая обмотка с длиной волны возбуждается LC-колебанием, сигнал управления выборкой и удержанием (SAH) сигнала приемной обмотки с длиной волны активируется, когда ток колебаний проходит через нуль, сигнал выборки усиливается и преобразуется в аналого-цифровой (ADC), и, наконец, требуемая фаза получается с помощью операции обратной тангенсации. Патент CN1198111C совершенствует структуру шкалы и расположение каждой передающей обмотки в US5886519. В новой шкале используется несколько взаимосвязанных контуров связи для создания положительных и отрицательных симметричных пространственных магнитных полей в области приемной обмотки, при этом метод измерения остается неизменным. Датчик смещения электромагнитной индукции абсолютного положения не требует минимальной частоты измерения, поэтому он может работать с перебоями в течение длительного времени, а средний рабочий ток очень мал; недостатком является то, что его ограниченный диапазон ограничивает область его применения, например, ширина паза обычного штангенциркуля составляет всего около 12,5 мм, и он может вместить не более двух вариантов длины волны улучшенной конструкции. С текущим производственным процессом она не может применяться к обычным штангенциркулям более 200 мм. Кроме того, для ручных измерительных инструментов с питанием от кнопочной батареи непросто реализовать высокоскоростной компаратор, АЦП, арктангенсную операцию и другие функциональные элементы в методе измерения, поэтому стоимость производства достаточно высокая.
Раскрытие сущности изобретения
Подводя итог, целью изобретения является устранение технических недостатков существующего позиционирующего датчика перемещения электромагнитно-индукционного типа, таких как большой рабочий ток, ограниченный диапазон, высокая стоимость производства и большая сложность изготовления, а также раскрытие комбинированного позиционирующего датчик перемещения электромагнитно-индукционного типа, который может обеспечить работу с перерывами, не имеет ограничений по диапазону и прост в использовании.
Для решения технических задач, предлагаемых настоящим изобретением, приняты следующие технические решения:
Комбинированный позиционирующий датчик перемещения электромагнитно-индукционного типа, отличающийся тем, что датчик включает в себя плату приемопередатчика (1) и плату возбуждения (2), которые могут перемещаться относительно друг друга по пути измерения.
Плата передатчика-приемника (1) снабжена измерительной схемой и, по меньшей мере, одной передающей обмоткой, проходящей вдоль пути измерения. В каждой передающей обмотке используется две примерно замкнутые прямоугольные катушки, чтобы последовательно однонаправленно окружать трехфазную приемную обмотку первого шага и приемную обмотку второго шага трехфазного соединения соответственно, каждая трехфазная приемная обмотка содержит 3 фазных обмотки с одинаковой структурой и разностью витков 120°, передающая обмотка и трехфазная приемная обмотка связаны с измерительным контуром; измерительный контур включает в себя центральный блок управления, блок сопряжения и блок измерения, центральный блок управления включает в себя микроконтроллер (13), блок сопряжения включает в себя контур ввода ключа, жидкокристаллический задающий контур; контур измерительного интерфейса и контур преобразования мощности, вышеуказанные контуры соединены с микроконтроллером (13).
Плата возбуждения (2) имеет по меньшей мере два ряда катушек возбуждения, которые проходят вдоль пути измерения и равны количеству трехфазных приемных обмоток на плате приемопередатчика (1), шаг каждого ряда катушек возбуждения равен соответствующим трехфазным приемным обмоткам на плате приемопередатчика (1), центральные линии совпадают, а размер вдоль пути измерения составляет половину соответствующего шага.
Технические решения, которые дополнительно ограничивают настоящее изобретение, включают в себя:
блок измерения включает в себя генератор, контур деления частоты (3), генератор сигналов, состоящий из контура формирования управляющих и дискретизирующих импульсов (4) и генератора сигналов управления сканированием линейного напряжения (5), контур обработки аналоговых сигналов, состоящий из группы аналоговых переключателей (6), конденсаторов выборки и хранения (C1, С2), дифференциального усилителя (7), фильтра нижних частот (8) и детектора перехода через нуль (9), контур фазового квантования, состоящий из контура синхронной задержки, суммирующего счетчика (10), оперативной памяти (11, 12) и контура синхронного захвата, а также силовую трубку привода передающей обмотки (T1, Т2), а контур обработки аналоговых сигналов, оперативная память и контур синхронного захвата разделены на две группы, образуя два параллельных канала обработки; контур синхронной задержки соответственно подключен к контуру синхронного захвата и суммирующему счетчику (10), а суммирующий счетчик (10) и контур синхронного захвата одновременно подключены к оперативной памяти (11, 12).
Генератор напрямую или через контур деления частоты (3) обеспечивает входные тактовые импульсы для контура формирования управляющих и дискретизирующих импульсов (4), генератора сигналов управления сканированием линейного напряжения (5), фильтра нижних частот (8), контура синхронного захвата и суммирующего счетчика (10); контур формирования управляющих и дискретизирующих импульсов (4) подключен к группе аналоговых переключателей (6), а также напрямую или через многоканальный переключатель (S14) к силовой трубке привода передающей обмотки (T1, Т2), генератор сигналов управления сканированием линейного напряжения (5) соответственно подключен к группе аналоговых переключателей (6) и контуру синхронной задержки; группа аналоговых переключателей (6), дифференциальный усилитель (7), фильтр нижних частот (8), детектор перехода через нуль (9) и контур синхронного захвата подключены последовательно, конденсаторы выборки и хранения (C1, С2) подключены между входной клеммой дифференциального усилителя (7) и заземлением аналогового сигнала; контур синхронной задержки соответственно подключен к контуру синхронного захвата и суммирующему счетчику (10), а суммирующий счетчик (10) и контуру синхронного захвата подключены к оперативной памяти (11, 12) одновременно; каждая передающая обмотка подключена к источнику питания через свою собственную силовую трубку привода (T1 или Т2), каждая трехфазная приемная обмотка подключена в форме звезды (Y), а нейтральная точка подключена к заземлению аналогового сигнала.
Каждая передающая обмотка использует две приблизительно замкнутые катушки, чтобы соответственно окружать две трехфазные приемные обмотки с разными шагами последовательно в одном и том же направлении; все катушки возбуждения имеют форму короткозамыкающего кольца; каждая фазная приемная обмотка состоит, по крайней мере, из 2 М подобмоток с одинаковой структурой, но с фазовым сдвигом 60°/М последовательно, формируя распределенную обмотку, и каждая подобмотка, образующая распределенную обмотку, сама может представлять собой распределенную обмотку; при каждом разе пространственная фаза или смещение измеренного положения с двумя разными шагами, окруженными одной и той же передающей обмоткой, измеряются параллельно; после измерения пространственной фазы или смещения измеренного положения в пределах требуемого другого шага микроконтроллер (13) останавливает блок измерения и вычисляет измеренное смещение, используя алгоритм комбинированного или абсолютного позиционирования.
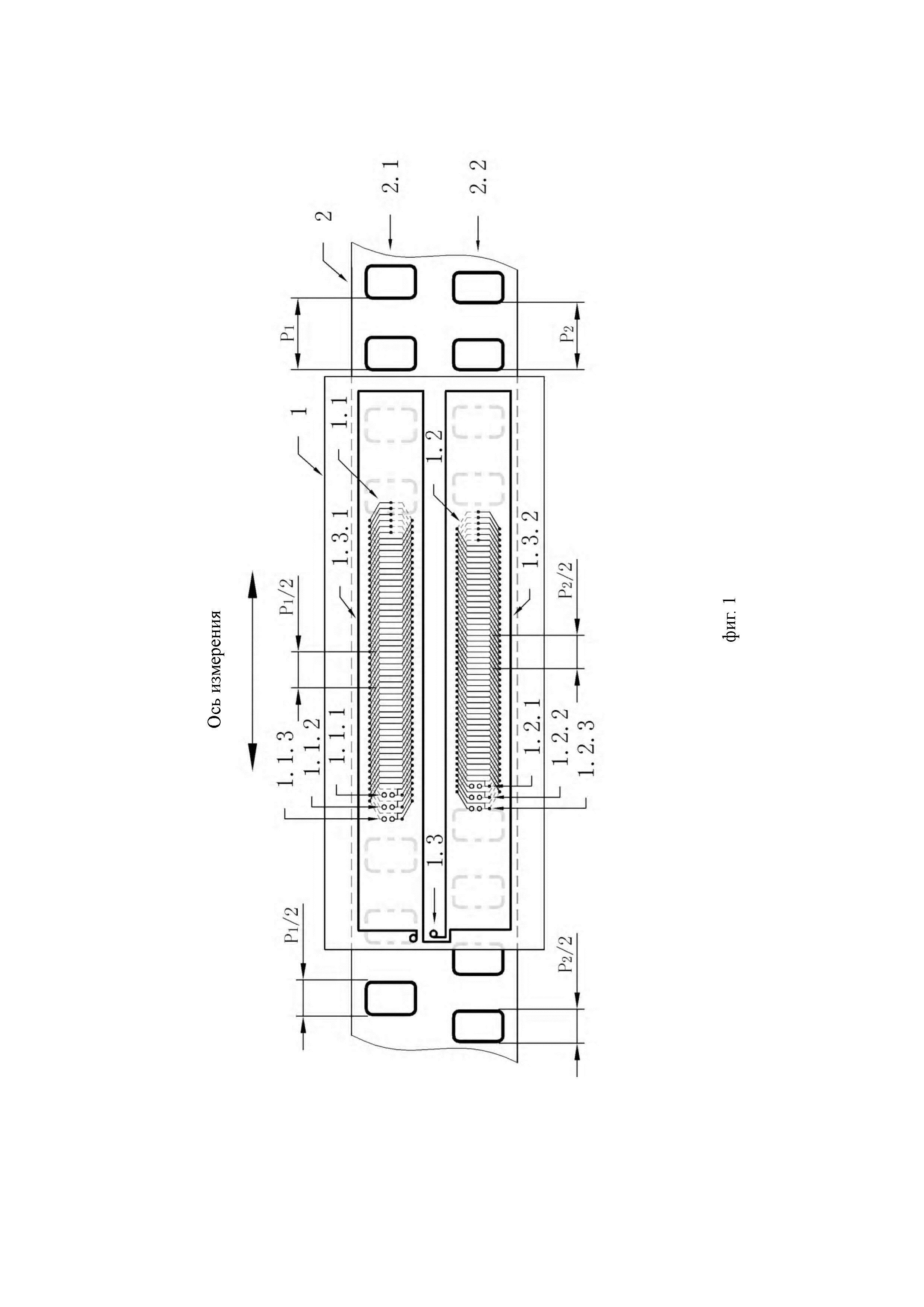
При использовании двухшаговой конструкции для измерения линейного смещения, плата приемопередатчика (1) и плата возбуждения (2) могут перемещаться относительно оси измерения; на плате приемопередатчика (1) размещены передающая обмотка (1.3), разворачивающаяся по оси измерения, и две трехфазные приемные обмотки (1.1 и 1.2) с разным шагом; на плате передатчика и приемника (1) размещены передающая обмотка (1.3), разворачивающаяся по оси измерения, и две трехфазные приемные обмотки (1.1 и 1.2) с разным шагом; передающая обмотка (1.3) окружает трехфазную приемную обмотку (1.1) с шагом P1 и трехфазную приемную обмотку (1.2) с шагом Р2 двумя примерно замкнутыми прямоугольными катушками (1.3.1 и 1.3.2), последовательно соединенными друг с другом в одном направлении; на плате возбуждения (2) расположены два ряда катушек возбуждения (2.1, 2.2), идущих вдоль оси измерения, которые имеют тот же шаг, что и две трехфазные приемные обмотки (1.1, 1.2) на плате приемопередатчика (1), центральные линии совпадают, а катушка возбуждения имеет форму закругленного прямоугольного короткозамыкающего кольца.
Принимая разность пространственных частот между шагами Р2 и P1 как пространственную частоту среднего шага FM = 1/Р2 - 1/P1, получаем средний шаг РМ = 1/FM = P1 ⋅ P2/(P1 - P2) = m ⋅ P1 = (m+1) ⋅ P2 с отношением длин волн m.
При использовании двухшаговой конструкции для измерения углового смещения комбинированный позиционирующий датчик перемещения электромагнитно-индукционного типа по п. 1, отличающийся тем, что плата приемопередатчика (1) и плата возбуждения (2) могут вращаться относительно друг друга вокруг вала, а шаг рассчитывается в соответствии с угол наклона; передающая обмотка (1.3), разворачивающаяся по концентрической дуге, и две трехфазные приемные обмотки (1.1 и 1.2) с разным шагом расположены на плате приемопередатчика (1); Передающая обмотка (1.3) окружает трехфазную приемную обмотку (1.1) с шагом P1 и трехфазную приемную обмотку (1.2) с шагом Р2 двумя приблизительно замкнутыми концентрическими дуговыми катушками (1.3.1 и 1.3.2) последовательно в одном направлении; пластина возбуждения (2) снабжена двумя рядами катушек возбуждения (2.1, 2.2), которые вытянуты по концентрической окружности, шаг двух рядов катушек возбуждения такой же, как и у двух трехфазных приемных обмоток (1.1, 1.2) на плате приемопередатчика (1), центральные линии совпадают друг с другом. Катушка возбуждения имеет форму короткозамыкающего кольца, окруженного двумя концентрическими дугами и двумя радиальными прямыми линиями.
Принимая разность пространственных частот между шагами Р2 и P1 как пространственную частоту среднего шага FM = 1/Р2 - 1/P1, получаем средний шаг PM = 1/FM = P1 ⋅ P2/(P1 - Р2) = m ⋅ Р1 = (m+1) ⋅ Р2 с отношением длин волн m.
При использовании 3-шаговой конструкции для измерения линейного смещения комбинированный позиционирующий датчик перемещения электромагнитно-индукционного типа по п. 1, отличающийся тем, что плата приемопередатчика (1) и плата возбуждения (2) могут перемещаться относительно оси измерения; на плате приемопередатчика (1) расположены две передающие обмотки (1.4, 1.5), развернутые вдоль оси измерения, и три трехфазные приемные обмотки (1.1, 1.2, 1.3) с разными шагами, В первой передающей обмотке (1.4) используются две приблизительно замкнутые прямоугольные катушки (1.4.1, 1.4.2), последовательно соединенные в одном направлении, чтобы соответственно окружать трехфазную приемную обмотку (1.1) с шагом Р1 и трехфазную приемную обмотку (1.2) с шагом Р2. Вторая передающая обмотка (1.5) окружает трехфазную приемную обмотку (1.1) с шагом Р1 и трехфазную приемную обмотку (1.3) с шагом Р3 с двумя приблизительно замкнутыми прямоугольными катушками (1.4.1, 1.5.2), включенными последовательно в одном направлении; плата возбуждения (2) снабжена тремя рядами катушек возбуждения (2.1, 2.2, 2.3), развернутых вдоль оси измерения, которые имеют одинаковый шаг с тремя трехфазными приемными обмотками (1.1, 1.2, 1.3) на плате приемопередатчика (1), центральные линии совпадают, а катушка возбуждения имеет форму закругленного прямоугольного короткозамыкающего кольца.
Принимая разность пространственных частот между шагами Р2 и P1 как пространственную частоту среднего шага FM = 1/Р2 - 1/P1, получаем средний шаг PM = 1/FM = Р1 ⋅ Р2/(Р1 - Р2) = m ⋅ Р1 = (m+1) ⋅ Р2 с отношением длин волн m; принимая разность пространственных частот между шагами Р3 и P1 как пространственную частоту большого шага FC=1/P3 - 1/Р1, получаем большой шаг PC = 1/FC = P1 ⋅ P3/(P1 - Р3) = m ⋅ n ⋅ P1 = (m ⋅ n + 1) ⋅ Р3 с отношением длин волн n.
Контур формирования управляющих и дискретизирующих импульсов (4) включает в себя нечетное количество каскадных инверторов и логический элемент НЕ-И (GNA); первый тактовый сигнал (SCLK), выводимый контуром деления частоты (3), используется в качестве как запускающего импульса контура, который должна быть подключен к входной клемме первого инвертора и одной входной клемме логического элемента НЕ-И (GNA) соответственно, выход нечетных чисел каскадных инверторов соединен с другой входной клеммой логического элемента НЕ-И (GNA), на каждом нарастающем фронте триггерного импульса (SCLK) логический элемент НЕ-И (GNA) выдает отрицательный узкий импульс, ширина которого равна общей задержке передачи нечетного числа каскадных инверторов; положительный сигнал управления выборкой и удержанием (SAH) получается путем инвертирования выхода (Y) логического элемента НЕ-И (GNA), а положительный управляющий сигнал (TG) получается путем инвертирования выхода (Y) логического элемента НЕ-И (GNA).
Генератор сигнала управления сканированием линейного напряжения (5) включает в себя 4 триггера D-типа (FF11, FF12, FF13, FF14); второй тактовый сигнал (PCLK), выводимый контуром деления частоты (3), одновременно подключается к тактовым клеммам четырех триггеров D-типа, а сигнал инициализации (INI), выдаваемый микроконтроллером (13), устанавливает четыре триггера D-типа на 1, 0, 0 и 1 соответственно; первые три триггера D-типа (FF11, FF12, FF13) составляют кольцевой счетчик циклического сдвига, а три выходных сигнала (Q0, Q1, Q2) по очереди имеют высокий уровень; четвертый триггер D-типа (FF14) считает выход (Q0) первого триггера D-типа (FF11), и каждый цикл кольцевого счетчика вызывает однократное переключение его выхода (Q3).
Группа аналогового переключателя (6) образует трехступенчатую структуру последовательного переключателя и последовательно выполняет выбор, обмен и выборку входных трехфазных напряжений: переключатели первого уровня (S1-S6) сконфигурированы в три пары {S1, S4}, {S2, S5} и {S3, S6} для выбора пары фазных напряжений {uA, uB}, {uA, uC} и {uB, uC}; переключатели второго уровня (S7-S8) меняют последовательность пар фазных напряжений, выбранных переключателями первого уровня, в соответствии с необходимостью; переключатели третьего уровня (S9-S10) производят выборку пары фазных напряжений, выдаваемых переключателями второго уровня, и сохраняют результаты в конденсаторах выборки и хранения (C1, С2).
Дифференциальный усилитель (7) выполняет операцию вычитания и усиления на двух выборках фазного напряжения, хранящихся в конденсаторах выборки и хранения (C1, С2) для получения сигнала выборки и удержания нулевого порядка соответствующего линейного напряжения; под управлением выходного сигнала генератора сигналов последовательно получается выборка циклического сканирования линейного напряжения в порядке А-В, А-С, В-С, В-А, С-А, С-В, а входное трехфазное напряжение приемной обмотки, которое не изменяется со временем (когда датчик не движется), но периодически изменяется в зависимости от измеренного положения, синтезируется в дискретный синусоидальный сигнал (us (n)), при этом пространственная фаза измеренного положения в пределах шага трехфазной приемной обмотки преобразуется в начальную фазу синусоидального сигнала с дискретным временем (us (n)).
Контур синхронной задержки включает в себя 3 триггера D-типа (FF21, FF22, FF23); последний выходной сигнал (Q3) генератора сигналов управления разверткой линейного напряжения (5) соединен с концом тактовой частоты первого триггера D-типа (FF21) в качестве входной тактовой частоты контура, а сигнал инициализации (INI) вывод микроконтроллера (13) предварительно устанавливает три триггера D-типа как 1, 1 и 0 соответственно, так что выходной сигнал (СЕ) имеет низкий уровень; первые два триггера D-типа (FF21, FF22) составляют 2-битный асинхронный вычитающий счетчик, который отсчитывает нарастающий фронт входных тактовых импульсов (Q3); когда наступает нарастающий фронт четвертых входных тактовых импульсов (Q3), выходной сигнал (СЕ) перескакивает на высокий уровень;
После того, как выходной сигнал (Се) контура синхронной задержки перескакивает на высокий уровень, суммирующий счетчик (10) начинает отсчет с 0, и контур синхронного захвата снимает блокировку захвата.
Контур синхронного захвата включает в себя 2 триггера D-типа (FF31, FF32) и логический элемент И (AG31); сигнал инициализации (INI), выводимый микроконтроллером (13), асинхронно сбрасывает два триггера D-типа (FF31, FF32) до нуля и блокирует захват значения суммирующего счетчика (10) до истечения времени задержки; по достижении времени задержки выходной сигнал (СЕ) контура синхронной задержки перескакивает на высокий уровень, и первый нарастающий фронт после сигнала прямоугольной формы (UZ), выводимого контуром обработки аналогового сигнала, устанавливает выходной сигнал (CS) первого триггера D-типа (FF31) на высокий уровень, а выходной сигнал (CP) логического элемента И (AG31) с этого времени был таким же, как прямоугольный сигнал (UZ); Второй триггер D-типа (FF32) синхронизирует выходной сигнал (CP) логического элемента И (AG31) с задним фронтом системных часов и синхронно фиксирует значение суммирующего счетчика (10) на переднем и заднем фронтах прямоугольного сигнала (UZ) соответственно, оно соответственно сохраняется в двух запоминающих устройствах с произвольным доступом (11, 12), тем самым получая квантованное кодирование пространственной фазы или смещения измеренного положения в пределах шага трехфазной приемной обмотки, подключенной к каналу обработки.
При использовании 2-шаговой конструкции, после того, как измеренное положение измеряется параллельно, квантование фазы кодирует N1 и N2 c двумя разными шагами Р1 и Р2, окруженными передающей обмоткой (1.3), точное смещение xF = N1 (соответственно шаг Р1 называется точным шагом PF), среднее смещение xM = m⋅ (N2 - N1), затем накапливается приращение смещения ΔxM двух соседних измерений для получения общего смещения xT = ∑(ΔxM), в соответствии с соотношением хТ ≈ KM ⋅ PM+xM, находим количество целых чисел среднего шага KM, содержащихся в общем смещении xT, согласно соотношению xM ≈ KF ⋅ PF+xF находим целое число точных расстояний, содержащихся в смещении xM KF после чего по формуле х = (m ⋅ KM+KF) ⋅PF+xF, получаем измеренное смещение х без ограничения диапазона; также можно использовать следующий алгоритм абсолютного позиционирования: сопоставив среднее смещение xM с полузамкнутым интервалом [0, PM) находим целое число KF минимального расстояния, содержащегося в среднем смещении xM, согласно соотношению xM ≈ KF ⋅ PF+xF, по формуле х = KF ⋅ PF+xF получаем измеренное смещение х абсолютного позиционирования в диапазоне среднего шага.
При использовании 3-шаговой конструкции коды квантования фазы N11 и N12 в двух разных шагах Р1 и Р2, окруженных первой передающей обмоткой (1.4), измеряются параллельно, а измеренное положение измеряется параллельно на второй передающей обмотке (1.5). После фазового квантования коды N21 и N23 в прилагаемых двух разных шагах Р1 и Р3, точное смещение xF = N21 (соответственно, шаг Р1 назовем мелким шагом PF), среднее смещение xM = m ⋅ (N12 - N11), большое смещение xC=m ⋅ n ⋅ (N23 - N21), большое смещение xCсопоставляется с полузамкнутым интервалом [0, PC), в соответствии с соотношением xC≈ KM ⋅ PM+xM находим целое число KM среднего шага PM большого смещения xC, в соответствии с соотношением xM ≈ KF ⋅ PF+xF находим целое число KF малого шага PF среднего смещения ХМ, согласно формуле xa =(m ⋅ KM+KF) ⋅ PF+xF получаем абсолютное смещение ха в диапазоне большого шага, если диапазон измерения не расширен, измеренное смещение х=ха, в противном случае измеренное смещение х=∑(Δxa) без ограничения диапазона может быть получено путем суммирования приращения Δха абсолютного смещения двух соседних измерений.
Изобретение имеет следующие положительные эффекты: изобретение может использоваться как для измерения линейного смещения, так и для измерения углового смещения; может использовать 2-шаговую конструкцию или 3-шаговую конструкцию; может использоваться алгоритм комбинированного позиционирования или алгоритм абсолютного позиционирования.
Как упомянуто выше, более длинный интервал, соответствующий разности частот, то есть средний или крупный шаг, может быть получен путем выполнения операции разности частот на пространственных частотах двух разных шагов; Смещение измеренного положения в среднем и крупном шагах может быть вычислено напрямую (абсолютное позиционирование) путем вычитания и усиления пространственной фазы измеренного положения в двух разных шагах работы разностной частоты, которая не зависит от истории измерений или процесс. Однако масштаб среднего шага ограничен. Когда используется 2-шаговая конструкция, общее смещение может быть получено путем накопления приращения смещения среднего шага двух соседних измерений, но шаг - это отношение среднего шага к длине волны; когда используется 3-шаговая конструкция, шкала крупного шага может соответствовать требованиям обычного измерения, однако когда применяется большой диапазон (за пределами диапазона крупного шага), измеренное смещение без ограничения диапазона и шага 1 может быть получено следующим образом: накопление приращения абсолютного смещения двух соседних измерений. Данный комбинированный метод позиционирования с абсолютным позиционированием и инкрементным накоплением может достигать цели, заключающейся в том, что измерительный контур работает прерывисто, а диапазон датчика не ограничен.
Передающая обмотка подключена к обоим концам источника питания через переключатель возбуждения (T1 или T2), а импульс возбуждения, выводимый контуром формирования управляющих и дискретизирующих импульсов (4), генерирует линейный изменяющийся во времени управляющий ток с короткой длительностью (уровень 10 нс) и быстрое увеличение скорости (уровень 10 мА/нс) в передающей обмотке; линейное изменяющееся во времени магнитное поле, создаваемое током, индуцирует вихревые токи, которые линейно растут со временем в двух рядах катушек возбуждения на пластине возбуждения (2), связанных с ней. Вихревые токи в двух рядах катушек возбуждения принимаются в трех перекрывающихся фаз. Площадь обмотки генерирует линейное изменяющееся во времени магнитное поле, которое периодически изменяется вдоль пути измерения с соответствующим шагом как период, так что две трехфазные приемные обмотки, которые перекрываются с ним, вынуждены не изменяться с время (когда датчик не движется), но принимается каждой трехфазной. Шаг обмотки - это трехфазная электродвижущая сила, период которой изменяется в зависимости от измеренного положения (относительного положения платы приемопередатчика и платы возбуждения); после использования трехступенчатой последовательно соединенной группы аналоговых переключателей (6) для завершения выбора, обмена и выборки фазных напряжений, дифференциальный усилитель (7) реализует операцию вычитания, чтобы синтезировать трехфазное напряжение каждой трехфазной приемной обмотки, окруженной передающей обмоткой, которое не изменяется со временем, в дискретный синусоидальный сигнал. Пространственная фаза измеренного положения в двух разных шагах, окруженных передающей обмоткой, преобразуется в начальную фазу двух синусоидальных сигналов с дискретным временем; синусоидальный сигнал с дискретным временем фильтруется фильтром нижних частот (8) для восстановления дискретизированного синусоидального сигнала непрерывного времени, а детектор перехода через нуль (9) преобразует синусоидальный сигнал непрерывного времени в прямоугольную волну; после того, как переходный процесс контура достаточно ослаблен, контур синхронной задержки снимает блокировку счетчика сумматора (10) и контура синхронного захвата. После синхронизации по системным часам, передний фронт и задний фронт двух прямоугольных волн полученные путем формирования, соответственно, захвата значения счетчика одного и того же счетчика сумматора (10), отсчитывающего от нулевой точки фазы, чтобы получить код квантования пространственной фазы или смещения измеренной позиции в двух разных шагах, окруженных передающей обмоткой (который может содержать фиксированное смещение). Для дискретизации сигнала, которая не меняется со временем, почти нет требований к синхронизации, а для последующей обработки сигнала дискретизации используются только несколько простых схем. Следовательно, изобретение предъявляет низкие требования к электронной схеме, легко интегрируется и удобно для реализации недорогого крупномасштабного производства. Краткое описание чертежей.
Фиг. 1 - схематическая диаграмма конструкции датчика при использовании 2-шаговой конструкции для измерения линейного смещения согласно настоящему изобретению;
Фиг. 2А - покомпонентное изображение соединения централизованной приемной обмотки для каждой фазы при использовании изобретения для измерения линейного смещения;
Фиг. 2В - схематическая диаграмма соединения централизованной приемной обмотки для каждой фазы при использовании изобретения для измерения линейного смещения;
Фиг. 2С - схематическая диаграмма подключения трехфазной централизованной приемной обмотки при использовании изобретения для измерения линейного смещения;
Фиг. 3А - схематическая диаграмма соединения распределенной приемной обмотки, реализованной с перекрытием, при использовании изобретения для измерения линейного смещения;
Фиг. 3В - схематическая диаграмма соединения распределенной приемной обмотки, реализованной в виде кладки, при использовании изобретения для измерения линейного смещения;
Фиг. 3С - схематическая диаграмма соединения распределенной приемной обмотки, реализованной комбинированным способом, при использовании изобретения для измерения линейного смещения;
Фиг. 4 - схематическая диаграмма конструкции датчика при измерении углового смещения с использованием 2-шаговой конструкции в соответствии с настоящим изобретением;
Фиг. 5 - схематическая диаграмма соединения распределенной приемной обмотки, реализованной комбинированным способом, при использовании изобретения для измерения линейного смещения;
Фиг. 6 - принципиальная схема контура измерения, когда в настоящем изобретении используется 2-шаговая конструкция;
Фиг. 7 - диаграмма формы сигнала контура измерения согласно настоящему изобретению.
Фиг. 8 - схематическая диаграмма схемы формирования управляющего и дискретизирующего импульсов настоящего изобретения;
Фиг. 9 - электрическая принципиальная схема генератора управляющего сигнала сканирования линейного напряжения согласно настоящему изобретению;
Фиг. 10 - блок-схема обработки прерывания таймера при использовании 2-шаговой конструкции согласно настоящему изобретению;
Фиг. 11 - блок-схема последовательности операций обработки прерывания захвата комбинированного алгоритма позиционирования, когда в настоящем изобретении используется 2-шаговая конструкция;
Фиг. 12 - блок-схема последовательности операций алгоритма обработки прерывания захвата алгоритма абсолютного позиционирования, когда в настоящем изобретении используется 2-шаговая конструкция;
Фиг. 13 - схематическая диаграмма конструкции датчика при использовании 3-шаговой конструкции для измерения линейного смещения согласно настоящему изобретению;
Фиг. 14 - принципиальная схема контура измерения, когда в настоящем изобретении используется 3-шаговая конструкция;
Фиг. 15 - блок-схема обработки прерывания таймера, когда в настоящем изобретении используется 3-шаговая конструкция.
Фиг. 16 - это блок-схема обработки прерывания захвата, когда в настоящем изобретении используется 3-шаговая конструкция.
Осуществление изобретения
Настоящее изобретение будет дополнительно описано ниже со ссылкой на чертежи и предпочтительные конкретные варианты осуществления настоящего изобретения.
1. Комбинированный позиционирующий датчик перемещения электромагнитно-индукционного типа по настоящему изобретению включает в себя плату приемопередатчика 1 и плату возбуждения 2, которые могут перемещаться относительно друг друга по пути измерения; см. Фиг. 1, который представляет собой схематическую диаграмму конструкции датчика при использовании 2-шаговой конструкции для измерения линейного смещения. Плата приемопередатчика 1 имеет трехфазную приемную обмотку 1.1 первого шага, приемную обмотку 1.2 трехфазного сигнала второго шага и передающую обмотку 1.3.
В передающей обмотке 1.3 используются две приблизительно замкнутые прямоугольные катушки 1.3.1 и 1.3.2, которые соответственно окружают трехфазную приемную обмотку 1.1 первого шага и приемную обмотку 1.2 второго шага последовательно в одном направлении. Следовательно, один привод передающей обмотки 1.3 может индуцировать трехфазную электродвижущую силу, содержащую информацию о положении, в двух трехфазных приемных обмотках 1.1 и 1.2, окруженных им одновременно, таким образом, пространственная фаза или смещение измеренного положения в этих двух разных шагах измеряется параллельно. Это не только помогает снизить энергопотребление, но и улучшает отслеживающую способность датчика; кроме того, последовательное соединение в одном направлении может удвоить индуктивность передающей обмотки 1.3 и снизить скорость нарастания тока возбуждения. При условии постоянного энергопотребления продолжительность управляющего тока может быть увеличена более чем на 50%, что способствует стабильности и обработке сигнала считывания. При компоновке должна быть сохранена симметрия между прямоугольной катушкой и трехфазной приемной обмоткой, и должно быть оставлено достаточно места между прямоугольной катушкой и каждой приемной обмоткой в направлении оси измерения, чтобы гарантировать, что магнитное поле, создаваемое ток возбуждения передающей обмотки 1.3 в двух трехфазных областях приемной обмотки представляет собой приблизительно двумерное магнитное поле, которое не изменяется вдоль оси измерения, поэтому электродвижущая сила, непосредственно индуцированная в каждой приемной обмотке, равна 0.
Трехфазная приемная обмотка первого шага 1.1 состоит из трех обмоток фазы А 1.1.1, обмотки фазы В 1.1.3 и обмотки фазы с 1.1.2 с одинаковой структурой и сдвигом на 1/6 шага в соответствии с пространством последовательности А-С-В. Шаг каждой фазовой обмотки равен Р1, а разность фаз составляет 120° согласно пространству последовательности А-В-С; Поскольку каждый шаг соответствует 360°, трехфазная приемная обмотка также может быть сдвинута в пространстве на 1/3 шага в порядке А-В-С. На Фиг. 2А представлена схема отключения каждой фазы приемной обмотки. Обмотка соединена катушками, которые состоят из верхней и нижней сторон с зеркальной симметрией. Пунктирная линия на рисунке указывает, что каждая катушка расположена на одной стороне нижнего слоя печатной платы, а сплошная линия указывает, что каждая катушка расположена на другой стороне слоя над нижним слоем (Bottom Layer) печатной платы, что будет называться верхним краем, который составляет всего около 0,1 мм; вся катушка имеет один шаг, но средние параллельные сегменты двух сторон отстоят друг от друга только на половину шага. Различные слои печатной платы соединены переходным отверстием (переходные отверстия, черные точки на рисунке). Подобно полноволновой обмотке трехфазного двигателя переменного тока, трехфазная обмотка находится в диапазоне фаз 60° (то есть пространство, занимаемое каждой фазной обмоткой на каждом половинном шаге, соответствует углу 60°, то есть трехфазная обмотка разделена на каждую половину шага), чтобы разделить положение в пространстве. В каждом диапазоне шага фазовые полосы расположены в порядке A, Z, В, X, С и Y, где X, Y и Z -соответственно зона отрицательной фазы фаз А, В и С, то есть разница составляет половину шага или 180°; катушки всех верхних боковых параллельных линий, принадлежащих одной и той же фазе в полосе отрицательной фазы, соединяются последовательно, чтобы сформировать группу, а затем катушки всех верхних параллельных линий, принадлежащих той же фазе в полосе положительной фазы, соединяются в серии, чтобы сформировать другую группу; две группы катушек соединены голова к голове и хвост к хвосту соответственно, чтобы сформировать замкнутый контур, и два вывода вырезаны из любого положения, чтобы получить фазную обмотку. Компоновку обмотки с более однородной структурой и более высокой симметрией можно получить, слегка отрегулировав головной и хвостовой концы, как показано на Фиг. 2В. Полученная трехфазная приемная обмотка показана на Фиг. 2С.
Форма волны наведенной электродвижущей силы вдоль измерительной оси устроенной трехфазной приемной обмотки не содержит четных гармоник, а линейное напряжение не содержит кратных гармоник 3, 6, 9 и т.д.; амплитуда гармоник монотонно уменьшается с увеличением ее порядка, поэтому основными гармоническими составляющими в линейном напряжении трехфазной приемной обмотки являются 5-я и 7-я гармоники. С этой целью по меньшей мере 2 М сосредоточенных обмоток, показанных на Фиг. 2В, могут быть пространственно смещены на 60°/М, после чего соединены последовательно для образования распределенной обмотки; амплитуды основной волны и гармоник, содержащихся в наведенной электродвижущей силе М подобмоток, соответственно равны, однако фазы основных волн последовательно различаются на 60°/ М, следовательно, коэффициент распределения основной волны (коэффициент распределения = синтетическая амплитуда электродвижущей силы/М раз амплитуда электродвижущей силы подобмотки) и коэффициенты распределения каждой гармоники различны. Нетрудно вывести его коэффициент подавления R_v для v-й гармоники:

Когда М2: R5=R7=3,73, то есть затухание 5-й и 7-й гармоник в 3,73 раза превышает затухание основной волны, и эффект заметен.
Сдвиг пространственной фазы 60°/М, когда шаг P1 большой, его можно реализовать, перемещая P1/(6 м) с перекрытием, как показано на Фиг. 3А; Когда шаг P1 мал, режим перекрытия не может использоваться для разводки и может быть реализован только путем преобразования L⋅P1+P1/(6M), где: L и М - целые числа, М≥2, a L ⋅ P1 больше чем длина подобмотки, как показано на Фиг. 3В. Кроме того, М распределенных обмоток с одинаковой структурой могут использоваться в качестве подобмоток для сдвига фазы на 60°/М. Затем последовательно формируется смешанная распределенная обмотка, в результате чего получается коэффициент подавления умноженных гармоник, как показано на Фиг. 3С. На Фиг. 3С две секции субраспределенных обмоток, которые сдвинуты по фазе на 30° с перекрытием, соединены, чтобы сформировать субраспределенную обмотку. Две такие субраспределенные обмотки сдвинуты по фазе на 30° в виде плитки и соединены для образования смешанной распределенной обмотки. Коэффициент подавления 5-й и 7-й гармоник составляет 3,73×3,73=13,91; Однако распределенная обмотка, образованная прямым сдвигом фаз 4 субраспределенных обмоток на 15° в соответствии с выражением (а), коэффициент подавления гармоник R5=4,66 и R7=6,08 меньше половины первого. На верхних схемах однофазных обмоток на Фиг. 3А, 3В и 3С пара проводов, используемых для последовательного соединения вспомогательных обмоток на разных слоях печатной платы, должна перекрываться, но для того, чтобы показать проводку, они намеренно расположены в шахматном порядке на диаграмме.
Трехфазная приемная обмотка 1.2 второго шага также включает в себя три обмотки 1.2.1 фазы А, обмотку 1.2.3 фазы В и обмотку 1.2.2 фазы С с одинаковой структурой и смещением на 1/6 шага в пространстве последовательности А-С-В, шаг каждой фазной обмотки равен Р2, а разность фаз составляет 120° в пространстве последовательности А-В-С. Метод соединения обмоток точно такой же, как и для трехфазной приемной обмотки первого шага.
Плата приемопередатчика 1 также должна содержать электронные схемы, необходимые для выполнения измерения, которые используются для управления передающей обмоткой 1.3, обработки сигналов считывания в приемной обмотке 1.1 и 1.2, отображения результатов измерения и т.д. Следовательно, плата приемопередатчика 1 обычно выполняется на 4-слойной печатной плате.
Два ряда катушек возбуждения 2.1 и 2.2 расположены на плате возбуждения 2 вдоль оси измерения (для наглядности катушка возбуждения под приемной обмоткой на рисунке не показана). Последовательность 2.1 катушки возбуждения и первая трехфазная приемная обмотка 1.1 с шагом на плате 1 приемопередатчика имеют одинаковый шаг (P1), и центральная линия совпадает; Точно так же шаг последовательности 2.2 катушки возбуждения такой же, как шаг второй трехфазной приемной обмотки 1.2 (Р2), центральная линия совпадает. Чтобы ослабить влияние соседнего магнитного поля, используется прямоугольное закорачивающее кольцо со скругленными углами в форме двух рядов катушек возбуждения. Ширина катушек возбуждения по оси измерения равна половине соответствующего шага. Плата возбуждения 2 имеет простую конструкцию и может быть изготовлена на односторонней печатной плате.
Поскольку длина двух прямоугольных катушек 1.3.1 и 1.3.2 передающей обмотки 1.3 (по оси измерения) намного больше ширины, и между ними и каждой трехфазной приемной обмоткой по длине достаточно места В направлении, прямоугольная катушка может быть приблизительно бесконечной с точки зрения магнитного поля, создаваемого током возбуждения передающей обмотки в каждой области приемной обмотки. Магнитное поле, создаваемое током в каждой приемной обмотке, является приблизительно двумерным магнитным полем, которое не изменяется вдоль измерительной оси, поэтому электродвижущая сила, непосредственно индуцированная в каждой приемной обмотке, равна 0.
Когда для измерения углового смещения используется структура с двумя шагами, конструкция датчика показана на Фиг. 4. Она состоит из двух частей, которые могут вращаться вокруг вращающегося вала А: платы приемопередатчика 1 и платы возбуждения 2. Плата 1 приемопередатчика скомпонована с трехфазной приемной обмоткой 1.1 первого шага, трехфазной приемной обмоткой 1.2 второго шага и передающей обмоткой 1.3, которые располагаются вдоль концентрических дуг. Передающая обмотка 1.3 окружена двумя приблизительно замкнутыми концентрическими катушками 1.3.1 и 1.3.2 с дугой окружности, последовательно расположенными в одном и том же направлении трехфазной приемной обмоткой 1.1 первого шага и приемной трехфазной обмоткой 1.2 второго шага соответственно. Обе трехфазные приемные обмотки 1.1 и 1.2 используют распределенные обмотки, и их шаг равен Р1 и Р2 соответственно, и обе состоят из трех фазных обмоток с разностью фаз 120° последовательно. Схема подключения распределенной трехфазной приемной обмотки первого шага, реализованной комбинированным способом, показана на Фиг. 5. На плате возбуждения 2 расположены два ряда катушек возбуждения 2.1 и 2.2 (для наглядности катушки возбуждения под приемной обмоткой на рисунке не показаны), которые подключены к двум трехфазным приемным обмоткам на плате приемопередатчика 1. 1.1 и 1.2 равны по шагу, а центральные линии совпадают; форма двух рядов катушек возбуждения представляет собой короткозамыкающие кольца, окруженные двумя концентрическими дугами и двумя радиальными прямыми линиями, а угол вдоль измерительной дуги равен половине их соответствующего шага. В дополнение к распределению концентрической дуги окружности и вычислению шага в соответствии с центральным углом окружности, другие случаи точно такие же, как и при измерении линейного смещения, и здесь не будут повторяться.
Если напряжение источника питания VCC подается на оба конца передающей обмотки 1.3 через токопроводящий переключатель возбуждения за период времени, намного меньший, чем постоянная времени контура (порядка мкс), в передающей обмотке 1.3 будет генерироваться линейный изменяющийся во времени ток возбуждения с быстро нарастающей скоростью (порядка 10 мА/нс); линейное изменяющееся во времени магнитное поле, создаваемое током, будет индуцировать вихревой ток, который линейно растет со временем в двух рядах катушек возбуждения на соединенной с ним плате возбуждения 2, вихревой ток в каждом столбце катушек возбуждения создает линейное изменяющееся во времени магнитное поле, которое периодически изменяется вдоль пути измерения с шагом в виде периода в области трехфазной приемной обмотки, которая перекрывает его. Таким образом, трехфазный электродвижущий элемент сила, которая не изменяется со временем (когда датчик не движется), но периодически изменяется в зависимости от измеренного положения (относительное положение платы приемопередатчика 1 и платы возбуждения 2) с шагом трехфазной приемной обмотки в виде периода, индуцируется в перекрывающейся с ней трехфазной приемной обмотке.

В формуле: Em - амплитуда электродвижущей силы каждой фазы, Р - шаг трехфазной приемной обмотки, х - измеренное смещение, а напряжения фаз А, В и С отстают на 2π/3 радиан. (120°).
Исходя из этого, можно получить следующее соотношение линейных напряжений:
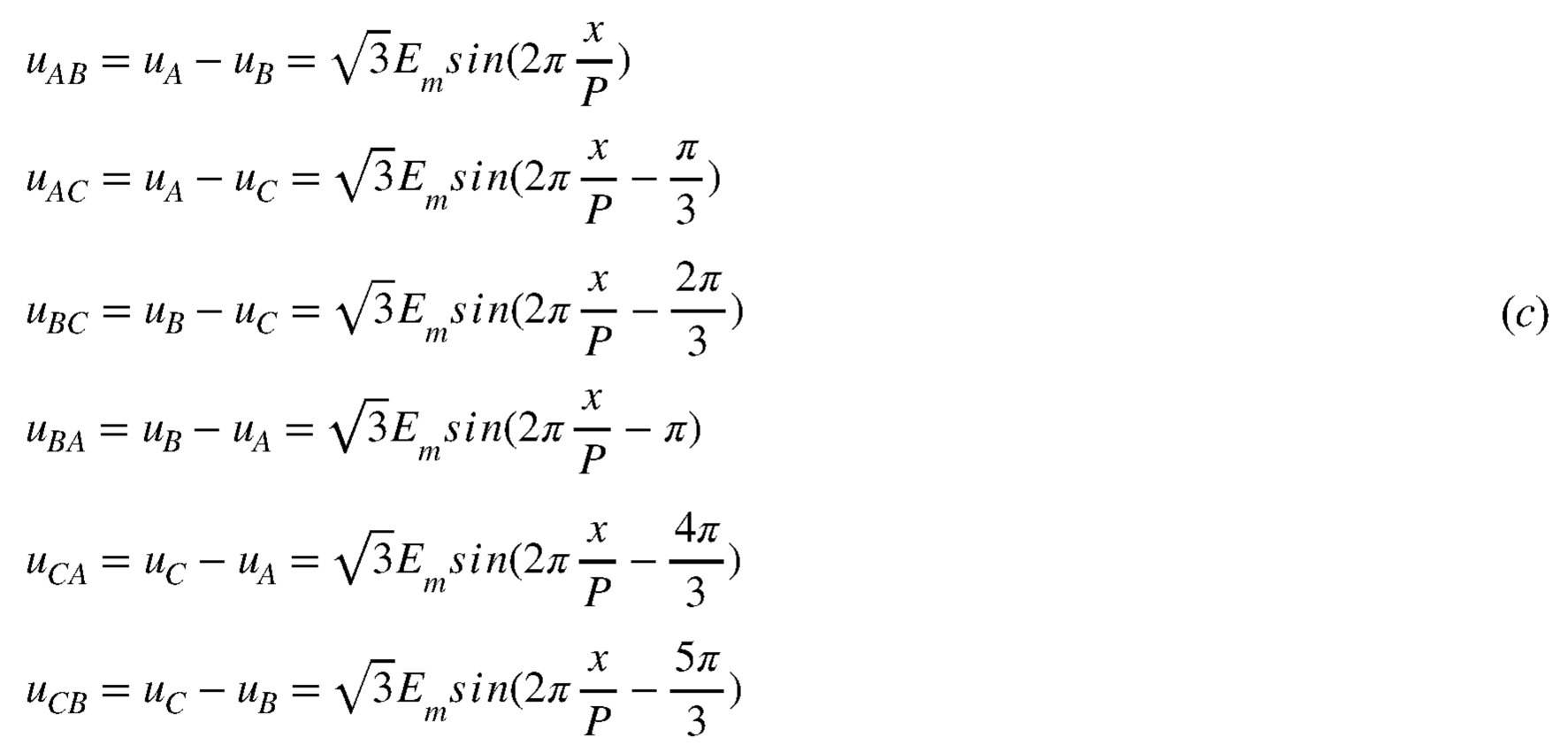
Видно, что они отстают в указанном порядке π/3 радиан. Следующие синусоидальные сигналы с дискретным временем могут быть синтезированы путем циклического сканирования и выборки шести линейных напряжений в одном и том же временном интервале в соответствии с перечисленной последовательностью А-В, А-С, В-С, В-А, С-А, С-В

Где:

Очевидно, это результат дискретизации следующих синусоидальных сигналов непрерывного времени с интервалом времени Т/6 (Т - период времени):

Вышеупомянутая формула преобразовала пространственную фазу 2πх/Р измеренного положения в пределах шага Р в начальную фазу непрерывного синусоидального сигнала u(t) (в том числе фиксированное смещение π радиан).
Фильтрация гармоник дискретного синусоидального сигнала us(n) может восстановить дискретизированный непрерывный синусоидальный сигнал u(t), а измерением разницы во времени между точкой пересечения нуля и точкой нуля фазы можно получить пространственную фазу или смещение измеренного положения в пределах шага.
Конкретная схема для реализации вышеупомянутой идеи приведена на Фиг. 6. Вся схема питается от литиевой батареи 3В и может быть разделена на три блока: центральный блок управления, интерфейсный блок и блок измерения. В центральный блок управления входит только маломощный микроконтроллер 13. Блок сопряжения включает в себя контур ввода ключа, жидкокристаллический (ЖК) задающий контур; контур измерительного интерфейса и контур преобразования мощности. Контур ввода клавиш и жидкокристаллический задающий контур используются для взаимодействия с пользователем; контур измерительного интерфейса используется для реагирования и обработки событий измерения; контур преобразования мощности отвечает за подачу питания на микроконтроллер 13 и генерирование половины напряжения источника питания VCC/2 в качестве заземления аналогового сигнала AGND. Оставшаяся схема представляет собой измерительный блок, который включает в себя генератор, контур деления частоты 3, генератор сигналов, состоящий из контура формирования управляющих и дискретизирующих импульсов 4 и генератора сигналов управления сканированием линейного напряжения 5, а также группу аналоговых переключателей 6 (S1-S10), конденсаторы выборки и хранения C1 и С2, дифференциальный усилитель 7, фильтр нижних частот 8, контур обработки аналогового сигнала, состоящая из детектора перехода через нуль 9, контур синхронной задержки (состоящей из триггеров D-типа FF21, FF22, FF23), суммирующий счетчик 10, оперативная память 11 и 12, контур квантования фазы, состоящий из контура синхронного захвата (состоящей из триггеров D-типа FF31, FF32 и логического элемента И AG31) и силовой трубки Т1 возбуждения передающей обмотки, два набора контуров обработки аналоговых сигналов, оперативной памяти и контура синхронного захвата разделены на две группы для образования двух параллельных каналов обработки; генератор генерирует системные часы с частотой fM, обеспечивающие входные тактовые импульсы для контура деления частоты, конденсаторного фильтра нижних частот 8, счетчика суммирования переноса 12K 10 и триггера D-типа FF32; схема деления частоты 3 выдает 2 выхода: SCLK, деленный на K (значение K определяется количеством требуемых подразделений), используется в качестве тактовых импульсов запуска контура формирования управляющих и дискретизирующих импульсов 4, а PCLK с 2K-делением - используется в качестве входной тактовой частоты генератора 5 управляющего сигнала развертки линейного напряжения; контур формирования управляющего и дискретизирующего импульсов 4, соответственно, подключен к силовой трубке T1 управления передающей обмоткой и группой аналоговых переключателей 6, генератор сигнала управления сканированием линейного напряжения 5 соответственно соединен с группой аналоговых переключателей 6 и контуром синхронной задержки, группа аналоговых переключателей 6, дифференциальный усилитель 7, фильтр нижних частот 8, детектор перехода через нуль 9 и контур синхронного захвата подключаются последовательно, конденсаторов выборки и хранения C1 и С2 соответственно подключаются между двумя входными клеммами дифференциального усилителя 7 и заземление аналогового сигнала; контур синхронной задержки, соответственно, соединен со контуром синхронного захвата и суммирующим счетчиком 12K 10, а суммирующий счетчик 12K 10 и контур синхронного захвата также подключены к запоминающим устройствам с произвольным доступом 11 и 12 одновременно; для снижения энергопотребления можно включать (Enable) и отключать (Disable) блок измерения. Метод отключения может заключаться в простом отключении питания (Shutdown) или остановке системных часов и отключении аналоговой цепи.
Трехфазные приемные обмотки 1.1 и 1.2 на плате приемопередатчика 1 соединены звездой (Y), две нейтральные точки соединены с землей аналогового сигнала, а передающая обмотка 1.3 подключена к обоим концам источника питания через переключатель привода (силовая трубка NMOS T1).
В каждом измерении микроконтроллер 13 сначала включает блок измерения, очищает (Clear) сигнал инициализации INI, после чего устанавливает (Set) его в блок, чтобы блок измерения начал работал; после завершения измерения микроконтроллер 13 отключает блок измерения, чтобы он остановить работу, тем самым снижая энергопотребление контура за счет прерывистой работы.
Индуктивность передающей обмотки 1.3 очень мала (менее 1 мкГн). Когда на нее подается напряжение VCC, ток в обмотке резко возрастает (скорость нарастания составляет порядка 10 мА/нс). Следовательно, время включения силовой трубки T1 должно точно контролироваться. Принимая во внимание характеристики переключения силовой трубки и переходный процесс схемы выборки, ширина импульса управляющего сигнала TG должна составлять около 30 нс.
Контур формирования управляющего и дискретизирующего импульсов 4 генерирует управляющий переключатель передающей обмотки 1.3 - управляющий сигнал затвора TG силовой трубки Ti NMOS и сигнал управления выборкой и сохранением SAH аналоговых переключателей S9 и S10 (и 2 соответствующих переключателя в канале обработки 1,2 второго шага трехфазной приемной обмотки). Входная емкость силовой трубки T1 относительно велика (порядка 100 пФ), поэтому управляющий сигнал TG должен выводиться через буфер для улучшения его управляющей способности. Трудно получить такой короткий и точный узкий импульс без точной настройки задержки емкости сопротивления. Кроме того, очевидно, что на него влияют напряжение источника питания, температура и другие факторы. Лучшее решение - это использовать задержку передачи инвертора для формирования пакетных импульсов возбуждения и выборки с небольшой дисперсией, короткой продолжительностью и без необходимости точной настройки. Конкретная схема показана на Фиг. 8. Когда входной сигнал (синхронизация триггера) SCLK низкий, на входе 2 GNA логического элемента НЕ-И низкий уровень, на входе 1 высокий уровень (из-за нечетной инверсии), а на выходе Y GNA высокий уровень; по нарастающему фронту синхросигнала триггера SCLK вход 2 GNA логического элемента НЕ-И переходит на высокий уровень, вход 1 остается на высоком уровне (из-за задержки передачи), а выход GNA у переходит на низкий уровень; предположим, что задержка передачи каждого каскада инвертора равна tpd (порядка нс), а количество нечетных используемых инверторов представлено как (2N+1), тогда после задержки (2N+1) tpd, НЕ-И Входная клемма 1 GNA затвора переходит на низкий уровень (из-за нечетного числа инверсий), а выход Y перескакивает на высокий уровень и остается до тех пор, пока снова не появится нарастающий фронт SCLK (так как GNA по-прежнему выводит высокий уровень, когда SCLK становится низким). Следовательно, каждый нарастающий фронт входного сигнала SCLK запускает GNA затвора НЕ-И для вывода узкого отрицательного импульса с шириной импульса (2n+1) tpd. Положительный сигнал управления дискретизацией и удержанием SAH получается путем инвертирования выходного сигнала у затвора НЕ-И GNA, а сигнал TG управления затвором силового транзистора Т1 получается путем инвертирования выхода у GNA.
Для каждого привода передающей обмотки 1.3 трехфазная электродвижущая сила индуцируется в трехфазной приемной обмотке 1.1 и 1.2 одновременно. Следовательно, выходные сигналы двух трехфазных приемных обмоток могут обрабатываться параллельно, а используемые схемы идентичны. Поэтому нижеследующее обсуждение касается только трехфазной приемной обмотки 1.1 первого шага.
Группа аналоговых переключателей 6 (S1-S10), конденсаторы выборки и хранения C1 и С2 и дифференциальный усилитель 7 совместно завершают выборку и усиление линейного напряжения трехфазной приемной обмотки 1.1 первого шага, чтобы синтезировать дискретный синусоидальный сигнал us(n), описанный в выражении (d). Управляющий сигнал Q0 отвечает за включение аналоговых переключателей S1 и S4 для генерации u1A - u1B (или его обратная фаза u1B - u1A), управляющий сигнал Q1 отвечает за подключение аналоговых переключателей S2 и S5 для генерации u1A - u1C (или его обратная фаза u1C - u1A). Управляющий сигнал Q2 отвечает за включение аналоговых переключателей S3 и S6 для генерации u1B - u1C (или его обратной фазы u1C - u1B). Управляющий сигнал Q3 отвечает за переключение каналов однополюсных двухпозиционных аналоговых переключателей S7 и S8 для определения того, происходит ли инверсия фазы. Управляющий сигнал SAH отвечает за включение аналоговых переключателей S9 и S10 для выборки двух входных фазных напряжений и сохранения результатов в конденсаторах выборки и хранения C1 и С2 соответственно. Наконец, дифференциальный усилитель 7 выполняет операцию вычитания и усиления для получения выборки линейного напряжения и сигнала удержания нулевого порядка. Можно видеть, что 10 аналоговых переключателей группы аналоговых переключателей 6 образуют 3-шаговую конструкцию последовательного переключателя для завершения выбора, обмена и выборки фазного напряжения по очереди, так что схема значительно упрощается без декодирования управляющего сигнала. Пока управляющие сигналы Q0, Q1 и Q2 по очереди имеют высокий уровень, каждый цикл Q0, Q1 и Q2 с помощью Q3 может быть инвертирован, а затем нажать А-В, А-С, В-С, В-А, С-А, С-В в последовательности выборки циклической развертки линейного напряжения, синусоидальные сигналы с дискретным временем us(n), описанные в синтезированном выражении (d).
Схема реализации генератора 5 сигнала управления сканированием линейного напряжения, который генерирует вышеупомянутые сигналы Q0, Q1, Q2 и Q3, показана на Фиг. 9. См. Фиг. 7 для каждой формы сигнала. Триггеры FF11, FF12 и FF13 типа D представляют собой циклический счетчик циклического сдвига. Сигнал инициализации INI предварительно устанавливает его на 1, 0 и 0, поэтому в любой момент существует только один высокий уровень; триггер FF14 D-типа считает нарастающий фронт Q0, поэтому его выход Q3 переворачивает каждый цикл Q0, Q1 и Q2; тактовый сигнал PCLK поступает из схемы 3 деления частоты, которая является выходом деления на 2 для синхросигнала запуска SCLK; Контур формирования управляющего и дискретизирующего импульсов 4 выводит управляющий и дискретизирующий импульс на каждом нарастающем фронте тактового сигнала запуска SCLK, поэтому каждое линейное напряжение непрерывно дискретизируется дважды для увеличения количества отсчетов дискретного синусоидального сигнала us(n) при относительном перемещении датчика. Частота пары PCLK равна fM системным синхросигналам 2K с частотным разделением, каждый цикл сканирования цикла (Q3 цикл) всего 6 ударов, включая 2K×6=12K циклов системных часов, соответствующее линейное напряжение изменяется на один цикл с шагом, следовательно, каждый шаг или пространство 2π радиан делится на 12K равных частей.
Патент CN101949682 В раскрывает емкостной датчик смещения абсолютного положения, который включает в себя метод измерения смещения измеренного положения на каждой длине волны с использованием счетчика сумматора после фильтрации нижних частот и обнаружения перехода через нуль синусоидального сигнала с дискретным временем, а также абсолютного позиционирования измеренного смещения. Соответствующее содержание представлено здесь.
Синусоидальный сигнал us(n) дискретного времени, синтезированный дифференциальным усилителем 7, фильтруется переключаемым конденсатором (для простоты интегрирования) и фильтром нижних частот 8 для восстановления синусоидального сигнала ur(t) непрерывного времени, аналогичного тому, что описанный в выражении (е), В это время пространственная фаза 2πх/Р1 измеренного смещения х в пределах шага P1 была преобразована в начальную фазу ur(t); детектор перехода через нуль 9 преобразует непрерывную время синусоидального сигнала ur(t) в прямоугольный сигналUZ, передний фронт соответствует точке перехода через нуль ur(t) от отрицательного к положительному, а задний фронт соответствует точке перехода через нуль ur(t) от положительного к отрицательному. Разница фаз между ними составляет 180°, когда датчик не движется, разница во времени между ними составляет 12K/2=6K, а частота равна fM, таким образом, оба из них могут использоваться для измерения пространственной фазы или смещения; разница во времени между точкой пересечения нуля и точкой нулевой фазы синусоидального сигнала непрерывного времени ur(t) пропорциональна пространственной фазе (может включать фиксированное смещение) измеренного положения в пределах шага P1. Следовательно, нарастающий или спадающий фронт прямоугольного сигналаUZ может использоваться для захвата значения суммирующего счетчика, который начинает счет с нулевой точки фазы и использует системные часы в качестве импульса счета для получения кода квантования пространственного фаза или смещение измеренного положения в пределах шага P1 (может содержать фиксированное смещение). Поскольку измерительная схема работает с перебоями, необходимо подождать достаточно времени перед захватом и подсчетом, чтобы переходный процесс в схеме в достаточной степени затухал. Установлены триггеры FF23 и D-типа FF31, FF32. Схема синхронного захвата, состоящая из логического элемента И AG31, форма его сигнала показана на Фиг. 7. Схема синхронной задержки, синхронная схема захвата, перенос 12K (поскольку каждый шаг делится на 12K равных частей), счетчик 10 суммирования, оперативное запоминающее устройство 11 и 12 совместно выполняют задачу квантования фазы.
Сигнал инициализации INI предварительно устанавливает триггеры D-типа FF21, FF22, FF23 на 1, 1, 0, а выходной сигнал СЕ низкого уровня с помощью FF23 сбрасывает счетчик суммирования переноса 10 12К асинхронно и предотвращает его подсчет; триггеры FF21 и FF22 D-типа составляют 2-битный счетчик асинхронного вычитания, который ведет обратный отсчет нарастающего фронта выходного сигнала Q3 от генератора 5 управляющего сигнала развертки линейного напряжения; когда наступает четвертый нарастающий фронт Q3, выходной сигнал W1 триггера FF22 D-типа производит положительный переход, чтобы установить выходной сигнал СЕ FF23 на 1: 12K. Счетчик суммирования 10 начинает отсчет с 0, а синхронный Схема захвата освобождает захват Блокировано, поэтому синхронная схема задержки генерирует задержку в 4 цикла Q3 и устанавливает нулевую точку фазы на переднем фронте Q3.
Сигнал инициализации INI асинхронно сбрасывает триггеры D-типа FF31 и FF32 на 0. Когда время задержки не истекло, выходной сигнал Се низкого уровня от контура синхронной задержки заставляет триггер D-типа FF31 всегда выводить CS низкого уровня, логический элемент AND AG31 всегда выводит CP низкого уровня, триггер D-типа FF32 всегда выводить сигналы низкого уровня [захват переднего фронта P1] и высокого уровня [захват заднего фронта P1], чтобы заблокировать захват значения счетчика 12K счетчика суммирования 10; по достижении времени задержки выходной сигнал CE контура синхронной задержки устанавливается на высокий уровень и на первый нарастающий фронт после прямоугольного сигнала UZ. Выходной сигнал CS D-триггера FF31 также устанавливается на высокий уровень, и выходной сигнал CP затвора AG31 будет таким же, как прямоугольный сигнал UZ; Когда счетчик суммирования переноса 10 12K 10 не генерирует счет, D-триггер FF32 синхронизирует выходной сигнал CP логического элемента AG31 для вывода сигналов [P1 переднего фронта] и противофазных сигналов [P1нижнего фронта захвата] в одной и той же фазе. Вычисленные значения счетчика суммирования 10 12K регистрируются синхронно по переднему и заднему фронту прямоугольного сигнала UZ. Значение захвата считывается микроконтроллером 13, и измерение определяется, завершено ли измерение. Из диаграммы формы сигнала на Фиг. 7 видно, что передний фронт всегда захватывается первым, а задний фронт отстает на некоторое время до захвата. Следовательно, согласно значению захвата N1r переднего фронта и значению захвата N1f. По заднему фронту можно сделать вывод о том, движется ли датчик, и о его направлении движения.
Когда регистрируются нарастающие и спадающие фронты двух шагов, микроконтроллер 13 может отключить измерительный блок, чтобы он перестал работать, а затем вычислить измеренное смещение с помощью программного обеспечения.
Пространственная частота, соответствующая высоте шага Р1 равна F1=1/P1, а пространственная частота, соответствующая высоте шага Р2, равна F2=1/Р2, разность частот FM=F2 - F1 соответствует большему пространственному периоду - PM среднего шага:

Если PM = m ⋅ Р1, где m - целое число, это называется отношением длин волн среднего шага, тогда:

Чтобы облегчить крупномасштабное производство, настоящее изобретение предпочтительно выбирает меньшее отношение длин волн m=15 и принимает число деления частоты синхросигнала запуска SCLK K=25=32, затем каждый шаг делится на 12K=384 части, и когда разрешение смещения составляет 10 мкм, P1= 3,84 мм, Р2= 3,6 мм, PM = 15P1= 16Р2= 57,6 мм.
Предположим, что смещение измеренного положения равно х, и его коды квантования фазы в шагах Р1 и Р2 соответственно равны N1 и N2 (код квантования может быть получен по значению захвата нарастающего фронта, значению захвата заднего фронта или среднему значению два), то есть:
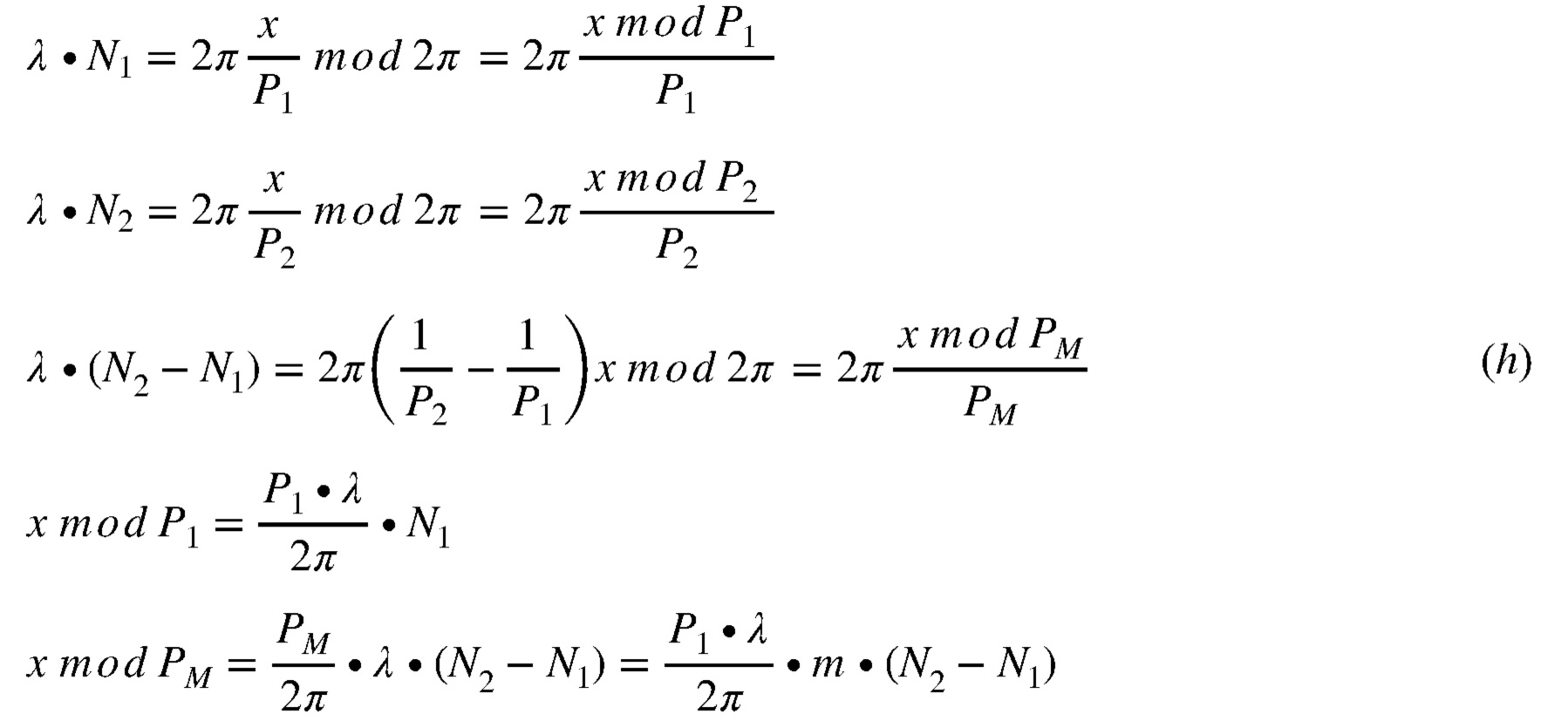
В формуле: λ - коэффициент пропорциональности, a mod - операция по модулю.
Разумно выбрать коэффициент пропорциональности λ так, чтобы P1 ⋅ λ/(2π)=1, тогда смещение измеренного положения по шагу Р1 равно х1=х mod Р1=N1, а шаг равен 1, и затем называется точным смещением xF (соответственно шаг Р1 - это малый шаг PF); Смещение измеренного положения в середине шага PM xM = х mod PM= m ⋅ (N2 - N1), а расстояние шага увеличивается в m раз вместе с диапазоном, поэтому оно называется средним смещением xM; среднее смещение xM является результатом вычитания и усиления двух различных кодов квантования фазы основного шага. Этот метод определения смещения без накопления называется абсолютным позиционированием; средний шаг PM увеличивается только в m раз, а масштаб ограничен. По этой причине приращение среднего смещения Δ xM двух соседних измерений суммируется для получения общего смещения xT=∑(ΔxM) без ограничения диапазона и шагового расстояния м; поскольку среднее смещение xM получается путем абсолютного позиционирования с двумя разными шагами, а полное смещение xT получается путем накопления приращения среднего смещения, этот метод измерения называется гибридным позиционированием. Приращение смещения при вычислении ΔxM Когда m, направление движения датчика должно быть объединено, чтобы результат согласовывался с направлением движения, то есть положительное приращение генерируется движением вперед, а отрицательное приращение генерируется обратным движением, поэтому необходимо иметь дело с разницей m ⋅ (ΔN2 - ΔN1) Добавить или вычесть средний шаг PM. Это основная причина использования как нарастающего, так и заднего фронта для захвата.
Согласно следующему соотношению:


Где: KM - количество средних шагов, KF - количество мелких шагов, оба из которых являются целыми числами.
То есть можно получить количество целых чисел KM среднего шага, включенных в общее смещение хТ, количество целых чисел KF малого шага, включенных в среднее смещение xM, и измеренное смещение х с шагом 1:

Данный комбинированный алгоритм позиционирования должен постоянно накапливать приращение среднего смещения, а смещение датчика между двумя измерениями не может превышать один средний диапазон шага, поэтому существует минимальное требование к частоте измерения. Например: при PM=57,6 мм для получения скорости измерения 2,5 м/с частота измерения не должна быть ниже 44 раз/с; поэтому предпочтительна частота измерения 50 раз в секунду, а результаты измерения отображаются каждые 6 раз (примерно 8 раз в секунду); учитывая низкую скорость в начале движения, для дальнейшего снижения энергопотребления частоту измерения датчика в состоянии покоя и ожидания (неподвижный и выключенный) можно уменьшить вдвое - до 25 раз / с. Для каждого измерения требуется около 5 циклов сканирования (период Q3, 4 для задержки), всего 384×5=1920 системных тактовых циклов с частотой fM. Когда частота fM=1 МГц, для завершения измерения требуется около 2 мс. Рабочий цикл прерывистой работы измерительной цепи составляет 2/20=0,1, когда датчик движется, и 2/40=0,05, когда датчик неподвижен и находится в режиме ожидания.
Если датчик с 2-шаговой конструкцией применяется к индикатору, малому штангенциркуля и другим измерительным приборам с малым диапазоном, можно использовать только среднее смещение xM, а точное смещение xF определяет измеренное смещение х в среднем диапазоне шага без накопления среднего смещения инкремент ΔxMрасширяет диапазон измерения и становится индуктивным датчиком перемещения для абсолютного позиционирования. По сравнению с существующим датчиком абсолютного положения он имеет следующие преимущества.
1. Передающая обмотка окружает одновременно две трехфазные приемные обмотки с разными шагами, и две группы сигналов датчиков с разными шагами могут быть получены одновременно с помощью одного привода, таким образом, измерение смещения измеренного положения с двумя разными шагами может выполняться параллельно. Это не только снижает энергопотребление группы цепей управления и первичных передающих обмоток, но также улучшает отслеживаемость быстрого движения датчика.
2. Распределенная приемная обмотка имеет сильную способность подавлять пространственные гармоники, поэтому нет необходимости использовать синусоидальную обмотку с большой площадью и сложной формой, что увеличивает плотность разводки приемной обмотки, количество катушек и принимаемый сигнал.
3. Катушка возбуждения имеет простую форму кольца короткого замыкания, которая имеет более короткий путь, меньшее сопротивление контура, больший наведенный вихревой ток и более сильный принимаемый сигнал, чем структура взаимосвязанного контура множественной связи; по сравнению с прямоугольной структурой из медной фольги интерференция соседнего магнитного поля меньше, а точность выше.
4. Используя управляющий импульс, образованный задержкой передачи, для возбуждения линейного изменяющегося во времени тока с короткой продолжительностью в передающей обмотке, в каждой приемной обмотке индуцируется ЭДС, которая не изменяется со временем (когда датчик не движется), что значительно снижает временные требования к синхронизации для схемы выборки; после того, как сигнал считывания синтезируется в синусоидальный сигнал с дискретным временем с помощью трехступенчатого последовательно соединенного аналогового переключателя и дифференциального усилителя, измеряется пространственная фаза или пространственная фаза или измерение смещения, поэтому схема измерения проста в реализации и интеграции.
Когда измеренное смещение х абсолютно позиционируется только в диапазоне среднего шага, среднее смещение xM = m ⋅ (N2 - N1) необходимо сопоставить с полузамкнутым интервалом [0, PM), чтобы соответствовать точному смещени xF ∈ [0, PF), то есть, когда xM отрицательно, добавьте к нему средний шаг PM, чтобы сделать его положительным, а затем вычислите целое число мелких шагов KF, содержащихся в среднем смещении xM из уравнения отношения (j), и наконец, вычислите измеренное смещение х следующим образом:

Подводя итог, можно сказать, что настоящее изобретение не требует внесения каких-либо изменений в структуру датчика и схемы измерения и может реализовать два метода измерения абсолютного позиционирования и комбинированного позиционирования только с помощью программного алгоритма. При использовании 2-шаговой конструкции абсолютное позиционирование имеет низкое энергопотребление, однако малый диапазон (ограничен диапазоном среднего шага), а комбинированное позиционирование не имеет ограничения диапазона, но требует минимальной частоты измерения.
Чтобы снизить потребление энергии при измерении, микроконтроллер 13 принимает режим управления прерыванием: каждый раз, когда прерывание возвращается, он немедленно переходит в спящий режим, пока новое прерывание не разбудит его снова. Для завершения измерения необходимы два вектора прерывания: прерывание по таймеру и прерывание по захвату. Прерывание таймера используется для начала измерения, а прерывание захвата используется для реагирования на события захвата: [захват нарастающего фронта P1], [захват заднего фронта P1], [захват нарастающего фронта Р2] и [захват спадающего фронта Р2] четыре внешних запросы на прерывание. Обобщая предыдущее введение, поток обработки прерывания двух алгоритмов смешанного позиционирования и абсолютного позиционирования при использовании структуры с двумя шагами резюмируется следующим образом:
I. Комбинированное позиционирование
Таймер генерирует прерывание каждые 20 мс, чтобы начать измерение с максимальной частотой 50 раз/с. когда датчик неподвижен или находится в режиме ожидания, частота измерения уменьшается вдвое; чтобы своевременно реагировать на события захвата, также разрешены четыре запроса внешнего прерывания, а именно: разрешение [захват нарастающего фронта P1], [захват заднего фронта P1], [захват нарастающего фронта Р2] и [захват заднего фронта Р2]. Процесс обработки показан на Фиг. 10.
Программа обслуживания прерывания захвата обрабатывает процесс измерения и данные. Во избежание повторных прерываний, захваченный запрос прерывания будет отключен (Disable) после считывания значения захвата источника прерывания; если измерение было завершено (все 4 захваченных запроса прерывания закрыты): отключите блок измерения, чтобы он прекратил работу, смещение xM = m ⋅ (N2 - N1), определите, движется ли датчик, и установите флаг состояния для взаимодействия с прерыванием таймера для достижения измерения преобразования частоты динамического/статического состояния, накопите приращение смещения ΔxM, чтобы получить полное смещение без ограничения диапазона хТ = ∑(ΔxM); когда необходимо отобразить результат измерения (это шестое измерение с момента последнего отображения): вычислите общее смещение xT, включая количество целых чисел KM среднего шага из соотношения (i), и вычислите среднее смещение из соотношения (j) Целое число мелких шагов, включенных в xM, равно KF, измеренное смещение х вычисляется согласно формуле (k), и результат измерения отображается в соответствии с требованиями пользователя. Блок-схема показана на Фиг. 11.
П. Абсолютное позиционирование
Таймер генерирует прерывание каждые 125 мс, чтобы начать измерение с максимальной частотой 8 раз в секунду, когда датчик неподвижен или находится в режиме ожидания, частота измерения также будет уменьшена вдвое, поэтому процесс обработки будет точно таким же, как и при комбинированном позиционировании, как показано на Фиг. 10.
Поток обработки захвата прерывания аналогичен процессу комбинированного позиционирования, за исключением того, что метод определения измеренного смещения отличается, и результаты измерения отображаются в каждом измерении, как показано на Фиг. 12. Считайте значение захвата источника прерывания и закройте запрос прерывания захвата; если измерение было завершено: отключите единицу измерения, вычислите смещение xM=m ⋅ (N2 - N1), определите, движется ли датчик и установить флаг состояния. Среднее смещение xM отображается в полузамкнутый интервал [0, PM), целое число точных расстояний KF, содержащихся в среднем смещении xM, вычисляется по реляционной формуле (j), измеренное смещение х рассчитывается по формуле (1) результаты измерений отображаются в соответствии с требованиями пользователя.
Если позволяет пространство, в изобретении также можно использовать 3-шаговую конструкцию, а конструкция датчика для измерения линейного смещения показана на Фиг. 13. Он состоит из двух частей, которые могут перемещаться относительно друг друга вдоль оси измерения: платы приемопередатчика 1 и платы возбуждения 2.
На плате 1 приемопередатчика расположены три трехфазные приемные обмотки 1.1, 1.2, 1.3 и две передающие обмотки 1.4, 1.5 с разным шагом. В передающей обмотке 1.4 используются две примерно замкнутые прямоугольные катушки 1.4.1 и 1.4.2, которые соответственно окружают трехфазную приемную обмотку 1.1 первого шага и приемную обмотку 1.2 второго шага последовательно в одном направлении; в передающей обмотке 1.5 используются две примерно замкнутые прямоугольные катушки 1.4.1 и 1.5.2, которые соответственно окружают трехфазную приемную обмотку 1.1 первого шага и приемную трехфазную обмотку 1.3 третьего шага, последовательно в одном направлении. Все трехфазные приемные обмотки 1.1, 1.2 и 1.3 используют распределенные обмотки с шагом P1, Р2 и Р3 соответственно, и каждая состоит из трех фазных обмоток с разностью фаз 120° последовательно.
На пластине возбуждения 2 расположены 3 ряда катушек возбуждения 2.1, 2.2 и 2.3, расположенных вдоль измерительной оси (для наглядности катушка возбуждения под приемной обмоткой на рисунке не показана), они соответственно имеют одинаковый шаг с тремя трехфазными приемными обмотками 1.1, 1.2 и 1.3 на плате 1 приемопередатчика, и центральные линии совпадают; все 3 ряда катушек возбуждения имеют форму закругленных прямоугольных колец короткого замыкания, а ширина сторон вдоль оси измерения равна половине соответствующих шагов.
Передающая обмотка 1.4, первая трехфазная приемная обмотка 1.1 и вторая трехфазная приемная обмотка 1.2, которые окружены передающей обмоткой 1.4, составляют плату приемопередатчика с 2-шаговой конструкцией, которая была подробно описана, и используется для измерения смещения среднего шага в пределах среднего шага; передающая обмотка 1.5, первая трехфазная приемная обмотка 1.1 и третья трехфазная приемная обмотка 1.3, которые окружены передающей обмоткой 1.5, составляют другую плату приемопередатчика с 2-шаговой конструкцией, которая используется для измерения шаг среднего шага и больший диапазон смещения в пределах крупного шага; две 2-шаговые конструкции с двумя шагами делят прямоугольную катушку 1.4.1 и окруженную ею трехфазную приемную обмотку 1.1. Таким образом, 3-шаговая конструкция эквивалентна комбинации двух 2-шаговых конструкций. Как плата приемопередатчика 1, так и плата возбуждения 2 расширены за счет датчиков линейного смещения с использованием конструкции с двумя шагами, и методы проектирования точно такие же, поэтому они не будут здесь повторяться.
Подобно процессу получения среднего шага PM, может быть получен большой шаг PC, аналогичный выражению (f):

Если PC = n ⋅ PM= m ⋅ n ⋅ Р1, где n - целое число, это называется отношением длин волн большого шага, тогда:

В настоящем изобретении отношение длин волн крупного шага n=m=15 выбирается на основе оптимальных параметров 2-шаговой конструкции, и используются параметры датчика 3-шаговой конструкции: P1=3.84 мм, Р2=3.6 мм, Р3=3.823 мм, PM=15 P1=57.6 мм, PC=225 P1=864 мм.
Когда код квантования фазы N11, N12 в двух разных шагах P1 и Р2 измеренного положения в первой структуре с двумя шагами может быть измерен параллельно шаг за шагом, а измеренное положение измеряется параллельно во втором шаге с двумя шагами структура Коды квантования фазы N21 и N23 в двух разных шагах Р1 и Р3 в структуре аналогичны процессу вывода выражения (h). Смещение измеренного положения в шаге Р1 равно х1 = xmod P1 - N2i (так как шаги P1 и Р3 находятся далеко друг от друга, точность N21 выше, чем у N11), его шаговое расстояние равно 1 и затем называется точным смещением xF (соответственно, шаг Р1 называется точным шагом PF); когда измеренное положение можно измерить шаг за шагом и смещение измеренного положения в среднем шаге PM на двух разных шагах в первой конструкции с двумя шагами xM = х mod PM = m ⋅ (N12 - N11) расстояние его шага равно м, в дальнейшем называемое средним смещением xM; смещение измеренного положения в пределах большого шага xC= х mod PC = m ⋅ n ⋅ (N23 - N21), расстояние шага равно m ⋅ n, будет называться большим смещением xC. После получения больших, средних и малых смещений xC, xM и xF, измеренное смещение х можно вычислить в соответствии со следующими шагами: большое смещение xC отображается в полузамкнутый интервал [0, PC), чтобы соответствовать точному смещению xF ∈ [0, PP), а большое смещение xC, используется вместо общего смещения xT. Из соотношения (i), получается середина большого смещения xC. Целочисленное количество шагов KM, целое количество мелких шагов KF, содержащихся в среднем смещении xM, вычисляется по формуле (j), а абсолютное смещение ха измеренного положения в пределах крупный шаг РС вычисляется согласно формуле (k); в общем, абсолютное смещение - это измеренное смещение х = ха. Однако в большом диапазоне (за пределами диапазона большого шага РС) может применяться путем накопления абсолютного приращения смещения двух соседних измерений Δха получить измеренное смещение х без ограничения диапазона = х = ∑ (Δxa) значение крупного шага является большим, даже если накопленное приращение абсолютного смещения не требует увеличения частоты измерения.
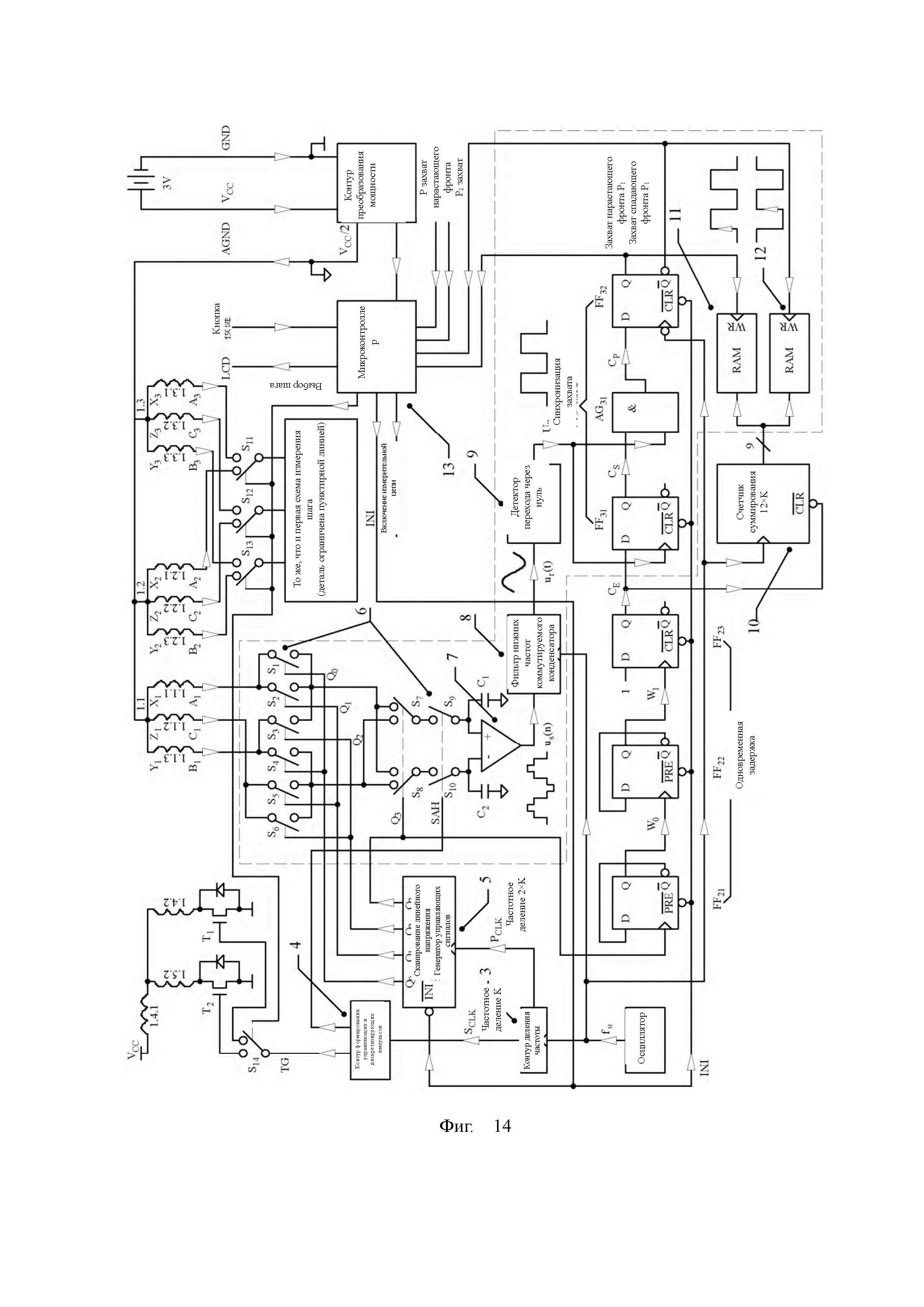
Конкретная схема для выполнения вышеуказанного пошагового измерения показана на Фиг. 14. Она добавляет только одну силовую трубку NMOS Т2 и четыре нескольких аналоговых переключателя S11-S14 (включая управляющие сигналы) в измерительную схему с использованием 2-шаговой конструкции, как показано на Фиг. 6. [Выбор шага]), поэтому принцип работы идентичен. После включения измерительного блока микроконтроллер 13 выдает низкоуровневый сигнал [выбор шага]: соедините выходную клемму управляющего сигнала TG с затвором силовой трубки возбуждения T1, чтобы сделать передающую обмотку 1.4 (состоит из катушек 1.4.1 и 1.4.2.) для приема привода подключите выходной зажим второй трехфазной приемной обмотки 1.2 второго шага ко второму каналу обработки. Затем очистите сигнал инициализации INI и установите его для начала первого измерения. Параллельно измеряются коды квантования фазы N11 и N12 измеренного положения в пределах первого шага P1 и второго шага Р2; затем микроконтроллер 13 выдает сигнал высокого уровня [выбор шага]: измените выходную клемму управляющего сигнала TG на затвор силовой трубки возбуждения Т2, чтобы передающая обмотка 1.5 (состоящая из катушек 1.4.1 и 1.5.2). Получите привод, подключите выходную клемму трехфазной приемной обмотки 1.3 третьего шага ко второму каналу обработки, снова сбросьте сигнал инициализации INI и установите его для запуска второго измерения, измерьте коды квантования фазы N21 и N23 измеренного положения в первом шаге P1 и третьем шаге Р3 параллельно; после этого микроконтроллер отключает измерительный блок, использует алгоритм абсолютного позиционирования для вычисления абсолютного смещения ха измеренного положения в крупном шаге и накапливает приращение абсолютного смещения Δха двух соседних измерений для расширения диапазона по мере необходимости.
Как и в случае 2-шаговой конструкции, микроконтроллер 13 также принимает режим возбуждения прерывания, и для завершения измерения требуются два вектора прерывания: прерывание по таймеру и прерывание по захвату.
Таймер генерирует прерывание каждые 125 мс, чтобы начать измерение с максимальной частотой 8 раз/с. Когда датчик неподвижен или находится в режиме ожидания, частота измерения уменьшается вдвое. По сравнению со структурой с двумя шагами, поток обработки имеет еще один этап «сигнала сброса [выбора шага]», как показано на Фиг. 15.
Поток процесса захвата прерывания показан на Фиг. 16. Считывание значения захвата источника прерывания и закрытие запроса прерывания захвата; если первое измерение завершено: установить один сигнал [выбор шага], сбросить сигнал инициализации INI, сбросьте каждый флаг запроса прерывания захвата, повторно откройте каждый запрос прерывания захвата и установите один сигнал инициализации INI для начала второго измерения; если второе измерение завершено: отключите единицу измерения, вычислите смещение xM = m ⋅ (N12 - N11), определите, движется ли датчик, и установите флаг состояния, вычислите большое смещение хС = m ⋅ n ⋅ (N23 - N21), сопоставьте большое смещение хС с полузамкнутым интервалом [0, РС), замените полное смещение хТ на большое смещение хС и вычислите количество KM промежуточных целых чисел шага, содержащихся в большом смещении хС, из соотношения (i) Вычислите целое число KF малого шага, включенного в среднее смещение xM, вычислить абсолютное смещение ха измеренного положения в пределах крупного шага РС в соответствии с формулой (k), добавить приращение абсолютного смещения Δх_а, если необходимо расширить диапазон и, наконец, отобразить результаты измерений в соответствии с требованиями пользователя.
3-шаговая конструкция также может использоваться для измерения углового смещения, однако угловое смещение должно быть только в пределах 360°. В общем, 2-шаговая структура может удовлетворять требованиям, поэтому здесь она не будет описана.
Вышеупомянутые варианты осуществления являются только конкретными примерами для дальнейшего пояснения объекта, технической схемы и полезного эффекта изобретения, и изобретение ими не ограничивается. Любая модификация, эквивалентная замена, улучшение и т.д., выполненные в рамках раскрытия изобретения, включены в объем защиты изобретения.
Реферат
Изобретение относится к технологии измерения смещения с использованием электромагнитной индукции. Датчик смещения электромагнитной индукции состоит из платы приемопередатчика и платы возбуждения, которые могут перемещаться относительно друг друга по пути измерения. Управляющий импульс, образованный задержкой передачи, возбуждает линейный изменяющийся во времени ток с короткой длительностью в передающей обмотке, в то же время в двух окруженных ею трехфазных приемных обмотках индуцируется электродвижущая сила, которая не изменяется со временем, после того, как трехфазная электродвижущая сила синтезирована, отфильтрована и сформирована, край полученной прямоугольной волны используется для захвата значения счетчика суммирования и измерения пространственной фазы или смещения измеренного положения в двух разных шагах параллельно. Измеренное смещение получается с помощью алгоритма комбинированного или абсолютного позиционирования. Технический результат – расширение диапазона измерений. 9 з.п. ф-лы, 16 ил.
Комментарии