Устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов - RU2749145C1
Код документа: RU2749145C1
Чертежи


Описание
Изобретение относится к области кораблестроения и может быть использовано для контроля параметров внутренней геометрии торпедных аппаратов, в частности величин отклонений от прямолинейности направляющих дорожек, величины изогнутости оси торпедного аппарата и значения диаметра, вписанного в направляющие дорожки прилегающего цилиндра.
Известно устройство для диагностики состояния внутренней поверхности труб по патенту РФ №2528033, МПК G01B 11/24, опубл. 10.09.2014, включающее в себя измерительный блок, содержащий источники освещения контролируемой внутренней поверхности, в качестве которых выступают четыре полупроводниковых лазера, корпус измерительного блока, который подключен к блоку регистрации и обработки информации, при этом измерительный блок имеет возможность перемещения внутри трубы.
Наиболее близким по технической сущности к заявляемому изобретению и принятым в качестве прототипа является устройство для обследования внутренней поверхности трубы, по патенту РФ №2683421, МПК F16L 55/32, F16L 101/30, G01N 21/954, опубл. 28.03.2019, включающее в себя корпус, в котором установлено оборудование для выполнения обследования внутренней поверхности трубы, снабженный двумя узлами радиальных распорок, каждый из которых включает в себя радиальные распорки, расположенные равномерно по периметру корпуса в плоскости, перпендикулярной оси исследуемой трубы, при этом количество радиальных распорок в каждом узле радиальных распорок равно четырем, на внешней оконечности каждой радиальной распорки установлен, по крайней мере, один ролик, ролики на, по крайней мере, одной радиальной распорке каждого узла радиальных распорок имеют электропривод, на, по крайней мере, двух смежных радиальных распорках каждого узла радиальных распорок установлен прижимной башмак, включающий в себя металлическую пластину со сквозным вырезом в средней части, центрированный относительно оси радиальной распорки и установленный с возможностью перемещения вдоль нее вплоть до прижима к внутренней стенке исследуемой трубы, и механизм прижима прижимного башмака, предназначенный для возвратно-поступательного перемещения прижимного башмака вдоль оси радиальной распорки вплоть до его прижима к внутренней стенке исследуемой трубы, а ролики на, по крайней мере, двух смежных радиальных распорках каждого узла радиальных распорок подпружинены.
Общим недостатком устройств - прототипа и аналога - является невозможность их применения в целях контроля параметров внутренней геометрии торпедных аппаратов по причине:
- отсутствия возможности фиксации отклонений продольной оси корпуса устройства при его перемещении от оси торпедного аппарата, задаваемой центрами сечений в районе заднего и переднего среза торпедного аппарата, что приводит к накоплению значительной ошибки измерений при перемещении вдоль торпедного аппарата, а также невозможности оценки действительных величин изогнутости торпедного аппарата и значения диаметра вписанного прилегающего цилиндра (в результате чего не обеспечивается взаимозаменяемость изделий морской техники, для которых используются торпедные аппараты);
- недостаточных точностных характеристик бесконтактных (в том числе с применением лазерных сканеров) методов контроля положения поверхностей, неоднородных по параметрам механической обработки, а также имеющих следы смазки и загрязнений;
- слабой повторяемости результатов измерений вследствие отсутствия механизмов центровки относительно базовых плоскостей торпедного аппарата.
Также общим недостатком аналога и прототипа является отсутствие возможности автоматизированной обработки результатов измерений с выдачей рекомендаций по доработке объекта измерений с учетом его конструктивных особенностей.
Задачей настоящего изобретения является разработка конструкции современного устройства для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов.
Техническим результатом изобретения является повышение точности измерений и обеспечение повторяемости контроля.
Указанный результат достигается за счет того, что устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов включает в себя корпус, в котором установлено оборудование для выполнения обследования внутренней геометрии торпедного аппарата, снабженный радиальными распорками с подпружиненными роликами, расположенными по периметру корпуса в плоскости, перпендикулярной оси исследуемого торпедного аппарата, и электропривод для перемещения устройства внутри торпедного аппарата, при этом в состав устройства входят узел автоматизированной фиксации отклонений продольной оси корпуса устройства при его перемещении от оси торпедного аппарата и программно-технический комплекс автоматизированной обработки результатов измерений с выдачей рекомендаций по доработке объекта измерений с учетом его конструктивных особенностей, оборудование для выполнения обследования внутренней геометрии торпедного аппарата выполнено в виде механических датчиков линейных перемещений, расположенных на радиальных распорках и контактирующих с внутренними контролируемыми поверхностями торпедного аппарата, а корпус устройства содержит механизм центровки относительно базовых плоскостей торпедного аппарата.
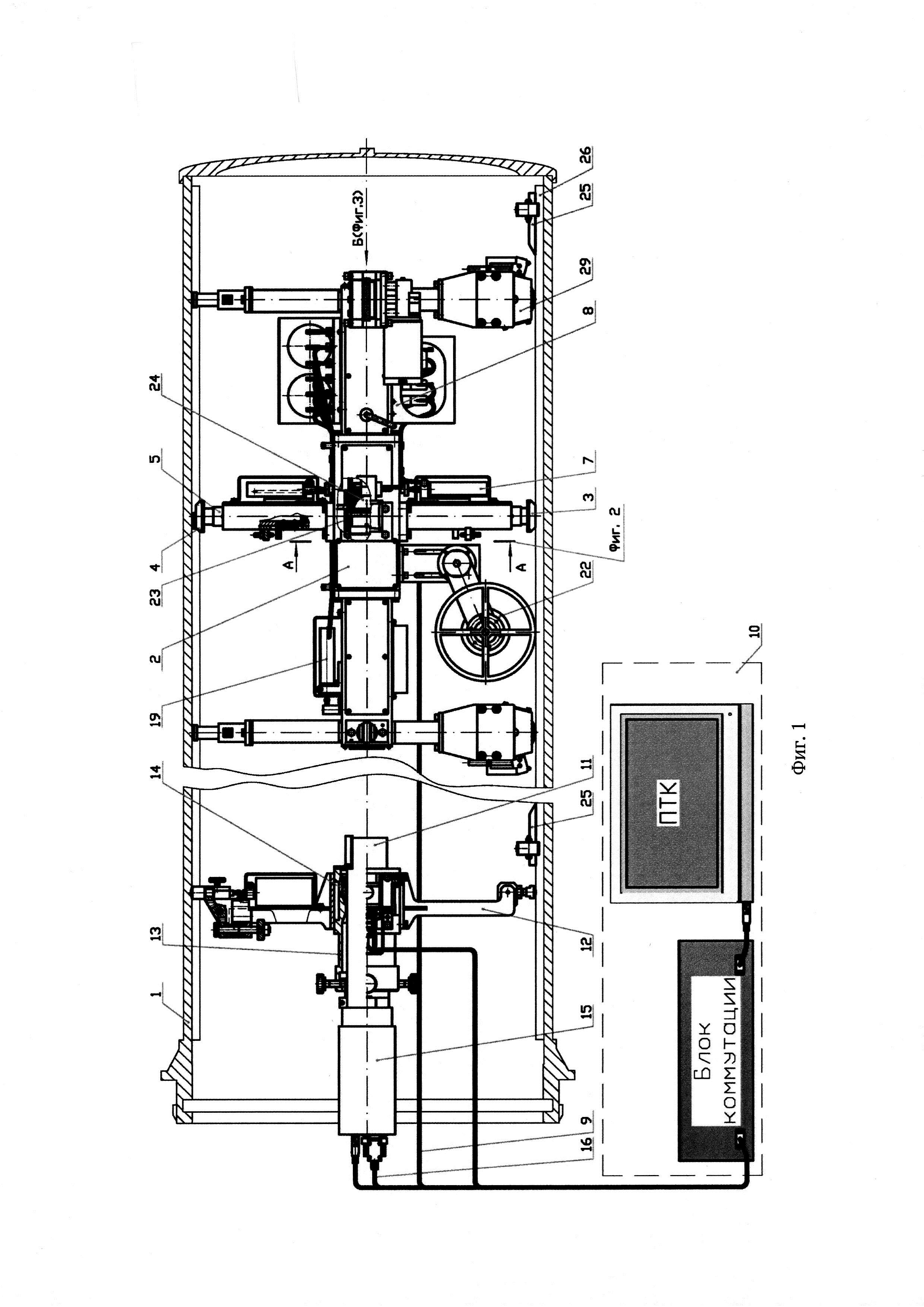
Сущность настоящего изобретения отражена на фиг. 1, где показана схема размещения заявляемого устройства внутри торпедного аппарата (продольный разрез), на фиг. 2, где показан вид устройства при взгляде со стороны переднего среза торпедного аппарата, и на фиг. 3, где показан поперечный разрез корпуса устройства.
Устройство для автоматизированного контроля параметров внутренней геометрии торпедного аппарата 1 содержит (фиг. 1) корпус 2, в котором установлено оборудование для выполнения обследования внутренней геометрии торпедного аппарата, представляющее собой контактирующие с внутренними контролируемыми поверхностями торпедного аппарата 1 измерительные пяты 3 и 4, размещенные на подпружиненных штангах 5, находящихся внутри (фиг. 2) радиальных распорок 6. Перемещения штанг 5 (фиг. 1) фиксируются установленными на них первичными преобразователями (механическими датчиками) линейных перемещений 7. Для подвода электропитания и снятия измерительной информации с датчиков служат коммутационные коробки 8, связанные кабелем 9 с расположенным у заднего среза торпедного аппарата 1 программно-техническим комплексом 10. В состав устройства входит узел 11 автоматизированной фиксации отклонений продольной оси корпуса 2 устройства при его перемещении от оси торпедного аппарата 1, представляющая собой шергень 12, в центральной части которого расположена оправа 13 со сферическим шарниром 14, в которую устанавливается оптико-электронный блок с контрольным элементом 15, например, фотоприемником, связанный с программно-техническим комплексом 10, например, кабелем 16. Корпус 2 устройства оснащен механизмом его центровки относительно базовых плоскостей торпедного аппарата, представляющий собой подпружиненные опоры 17 (фиг. 3), входящие в паз верхней направляющей дорожки 18 торпедного аппарата 1. Для перемещения корпуса 2 устройства внутри торпедного аппарата 1 используется привод 19, работающий совместно с роликом подпружиненным 20, упирающимся в боковые направляющие дорожки 21 торпедного аппарата 1. Контроль за величинами перемещений корпуса 2 вдоль оси торпедного аппарата 1 и остановками корпуса 2 в требуемых контрольных сечениях осуществляется абсолютным датчиком положения 22. Внутри корпуса 2 устройства установлены мишень 23 с осветителем 24, служащие для регистрации узлом 11 отклонений продольной оси корпуса 2 устройства при его перемещении от оси торпедного аппарата 1. Стопора 25 (носовой и кормовой), размещенные на нижней направляющей дорожке 26, предназначены для предотвращения аварийного выхода корпуса 2 за пределы торпедного аппарата 1.
Устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов работает следующим образом.
Перед началом измерений необходимо извлечь устройство из штатного футляра, открыть и застопорить обе крышки торпедного аппарата 1 (при работе на плаву - только заднюю). Носовой стопор 25 закрепить на нижней дорожке 26 торпедного аппарата 1 в районе ее переднего среза. Соединить коммутационные коробки 8 и контрольный элемент 15 с программно-техническим комплексом 10. Погрузить корпус 2 устройства и шергень кормовой 12 в торпедный аппарат 1. Проверить прижим привода 19 к боковым направляющим дорожкам 21 торпедного аппарата 1. Включить программно-технический комплекс 10. Переместить корпус 2 с помощью привода 19 в нос торпедного аппарата 1 в первое контрольное сечение, навести оптико-электронный блок с контрольным элементом 15 на мишень 23 и задать линию визирования. Устройство готово к работе.
Измерения параметров внутренней геометрии торпедного аппарата 1 производятся в автоматизированном режиме в соответствии с указаниями программно-технического комплекса 10, при этом с помощью привода 19 осуществляется последовательное перемещение корпуса 2 устройства в контрольные сечения торпедного аппарата 1 с определением отклонений точек профиля направляющих дорожек в сечениях торпедного аппарата 1 относительно измерительной базы, задаваемой линией визирования оптико-электронного блока с контрольным элементом 15 при его наведении на мишень 23. Значения отклонений точек профиля направляющих дорожек 18, 21 и 26 торпедного аппарата 1 относительно базовых элементов корпуса 2 устройства определяются показаниями установленных на них механических датчиков линейных перемещений 7. Вся измерительная информация фиксируются программно-техническим комплексом 10 и записывается в соответствующий файл. Полученная информация автоматически обрабатывается математическим путем и представляется в виде протокола, содержащего необходимые сведения о внутренних геометрических характеристиках торпедного аппарата 1, в том числе, о действительных величинах изогнутости торпедного аппарата 1, о действительном значении диаметра вписанного прилегающего цилиндра торпедного аппарата 1 и его положении в проекции на ортогональные координатные плоскости, на основании чего производится выдача рекомендаций по доработке объекта измерений с учетом его конструктивных особенностей.
Реферат
Устройство для автоматизированного контроля параметров внутренней геометрии торпедных аппаратов содержит корпус, радиальные распорки с подпружиненными роликами, расположенными по периметру корпуса в плоскости, перпендикулярной оси исследуемого торпедного аппарата, и электропривод для перемещения устройства внутри торпедного аппарата. В корпусе установлено оборудование для выполнения обследования внутренней геометрии торпедного аппарата. В состав устройства входят узел автоматизированной фиксации отклонений продольной оси корпуса устройства при его перемещении от оси торпедного аппарата и программно-технический комплекс автоматизированной обработки результатов измерений с выдачей рекомендаций по доработке объекта измерений с учетом его конструктивных особенностей. Оборудование для выполнения обследования внутренней геометрии торпедного аппарата выполнено в виде механических датчиков линейных перемещений, расположенных на радиальных распорках и контактирующих с внутренними контролируемыми поверхностями торпедного аппарата. Корпус устройства содержит механизм центровки относительно базовых плоскостей торпедного аппарата. Технический результат - повышение точности измерений и обеспечение повторяемости контроля. 3 ил.
Комментарии