Навесной блок для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта - RU203563U1
Код документа: RU203563U1
Чертежи
Описание
Полезная модель относится к устройствам бесконтактного контроля и определения габаритности, геометрических параметров и физических свойств строений на железной дороге. Устройство предназначено для сканирования и формирования трехмерной модели при определении предельного поперечного перпендикулярного оси пути очертания и геометрических параметров верхнего строения пути на железнодорожных перегонах и станциях без применения специальных вагонов-путеизмерителей.
Конструкция устройства представляет собой навесной блок, состоящий из П-образного алюминиевого каркаса с зажимными винтовыми креплениями для удержания конструкции на переднем буфере транспортного средства, а также с кронштейнами для крепления конструкции на вертикальных плоскостях железнодорожного транспорта. По периметру алюминиевого каркаса расположены лазерные высокоточные сканеры, а также устройства бесконтактного цифрового сканирования форм объектов, со встроенным конусообразным полем зрения с возможностью построения трехмерных моделей.
Известны устройства, имеющие назначение, совпадающее с назначением полезной модели. К ним относятся:
1. Лазерные высокоточные сканеры бесконтактного контроля [1, 2, 3] и различные системы измерения габаритов и веса [4, 5]. Данные устройства широко используются для бесконтактного контроля профиля поверхности, положения, перемещения, геометрических размеров, распознавания технологических объектов, построения 3D моделей, а также в автоматизированных системах, используемых в технологии работы с грузовым подвижным составом на железнодорожных станциях и подъездных путях промышленных предприятий.
2. Устройство контроля габаритов мостов, тоннелей, приближения строений, междупутного расстояния, очертаний верхнего строения железнодорожного пути и земляного полотна [6].
3. Устройство контроля геометрических параметров железнодорожного пути [7].
Перечисленные выше аналоги имеют следующие недостатки:
1. Бесконтактный контроль может осуществляться только на специализированных подвижных составах, осуществляющих скоростную съемку трассы.
2. В известных устройствах [6, 7] процесс измерения осуществляется с помощью лазерных сканеров, установленных в торце вагона-путеизмерителя, при этом съемка осуществляется уже после прохода головы состава. В ходе аварий и крушений на железной дороге, в условиях, когда габариты приближения строений будут в рамках габарита самого подвижного состава, головной состав не сможет пройти из-за этого съемка с помощью вагона-путеизмерителя или обычного вагона будет затруднена или невозможна.
3. Сложностью монтирования конструкции, в случае если необходимо сменить подвижной состав. Помимо приборов сканирования геометрических параметров необходимо производить демонтаж и монтаж блоков регистрации данных и электропитания.
4. Невозможность использования конструкции (вагонов путеизмерителей) при незначительных повреждениях верхнего строения пути из-за невозможности проезда данных участков на подвижном составе.
5. Используемые лазерные сканеры устанавливаются на плоские вертикальные поверхности, за счет чего происходит сокращение горизонтальных и вертикальных углов обзора, а это в свою очередь предполагает то, что сканирование состояния объектов в процессе движения будет производится с увеличенного расстояния, что приведет к определенным погрешностям при формировании геометрических параметров.
6. Необходимость привлечения тяговых машин для передвижения вагона-путеизмерителя по железной дороге, а также необходимость наличия раздельных пунктов на участках, где выполняются работы, для разъезда встречных или попутных подвижных состава в ходе выполнения работ.
7. Существующие технические решения и устройства бесконтактного контроля геометрических размеров и габаритов приближения строений [6, 7] не позволяют осуществлять сканирование таким образом, чтобы обработанная информация отображала не только геометрические параметры, но и физические свойства материалов на исследуемой поверхности. Так, например: сугробы, ветки деревьев, различные посторонние предметы, лежащие вблизи пути при лазерном сканировании, будут отображаться как негабарит, и при расшифровке результатов не будет ясности какой характер имеет данный негабарит.
Техническим результатом, на достижение которого направлено создание данной полезной модели, является возможность применения устройства на различных видах автомобильного и железнодорожного транспорта. Технический результат характеризуется тем, что за основу берется принцип действия устройств определения и контроля геометрических параметров железнодорожного пути, который реализуется за счет работы оптико-электронных приборов.
Технической задачей полезной модели является функциональная возможность применения навесного блока для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта при сканировании и определении габаритов приближения строений различных типов (С, СП, С250, 1-СМ геометрических параметров железнодорожного пути и формирования трехмерного изображения, отображающего геометрические и физические параметры сканируемых объектов на участках железной дороги в различных условиях местности и техническом состоянии железнодорожного пути.
Техническая задача выполняется за счет того, что навесной блок для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта, представляет собой конструкцию из П-образного алюминиевого каркаса с быстросъемными зажимными винтовыми креплением для переднего буфера транспортных средств, а также кронштейнами для крепления конструкции на вертикальных плоскостях железнодорожного транспорта. Такие крепления позволяют использовать данную конструкцию на разных видах автомобильного (оборудованного комбинированным ходом) и железнодорожного транспорта. Благодаря конструктивным особенностям навесного блока повышается достоверность результатов сканирования и увеличиваются возможности применения данного устройства на различных видах транспортных средств в труднодоступных и на поврежденных участках железной дороги при любых климатических условиях, без привлечения специальных путеизмерительных вагонов и составов.
Навесной блок включает в себя: П-образный алюминиевый капкас, с внешних сторон которого располагаются лазерные высокоточные сканеры для бесконтактного контроля приближения строений, профиля поверхности, положения, геометрических размеров и распознавания технологических объектов, в нижней части расположен блок управления и хранения информации записываемой в процессе съемки пройденного участка. В верхней части каркаса расположено устройство для бесконтактного цифрового сканирования форм объектов, позволяющее формировать трехмерные изображения сканируемых объектов.
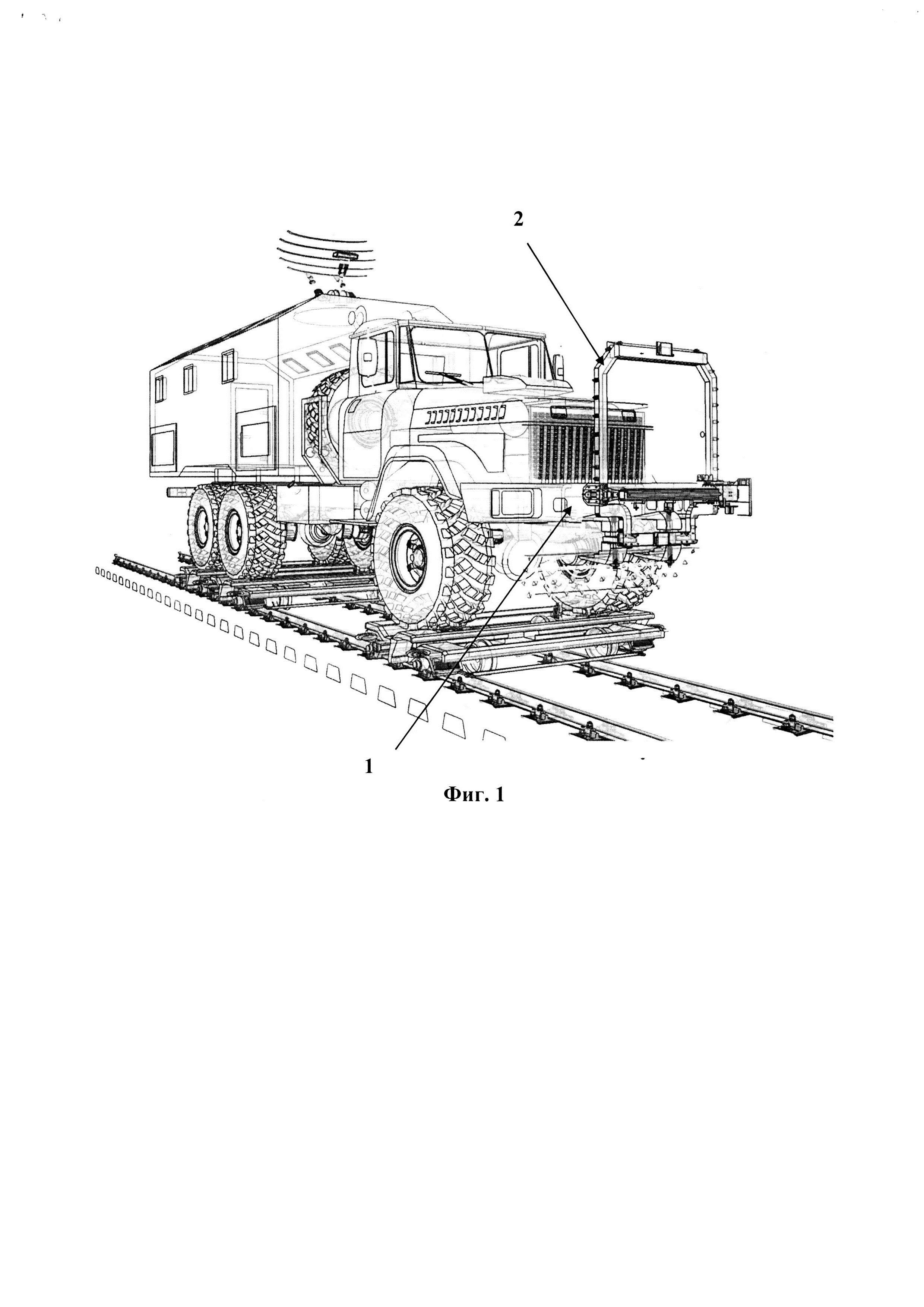
Предлагаемая конструкция универсального съемного оборудования бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта показана на рисунке, где обозначено:
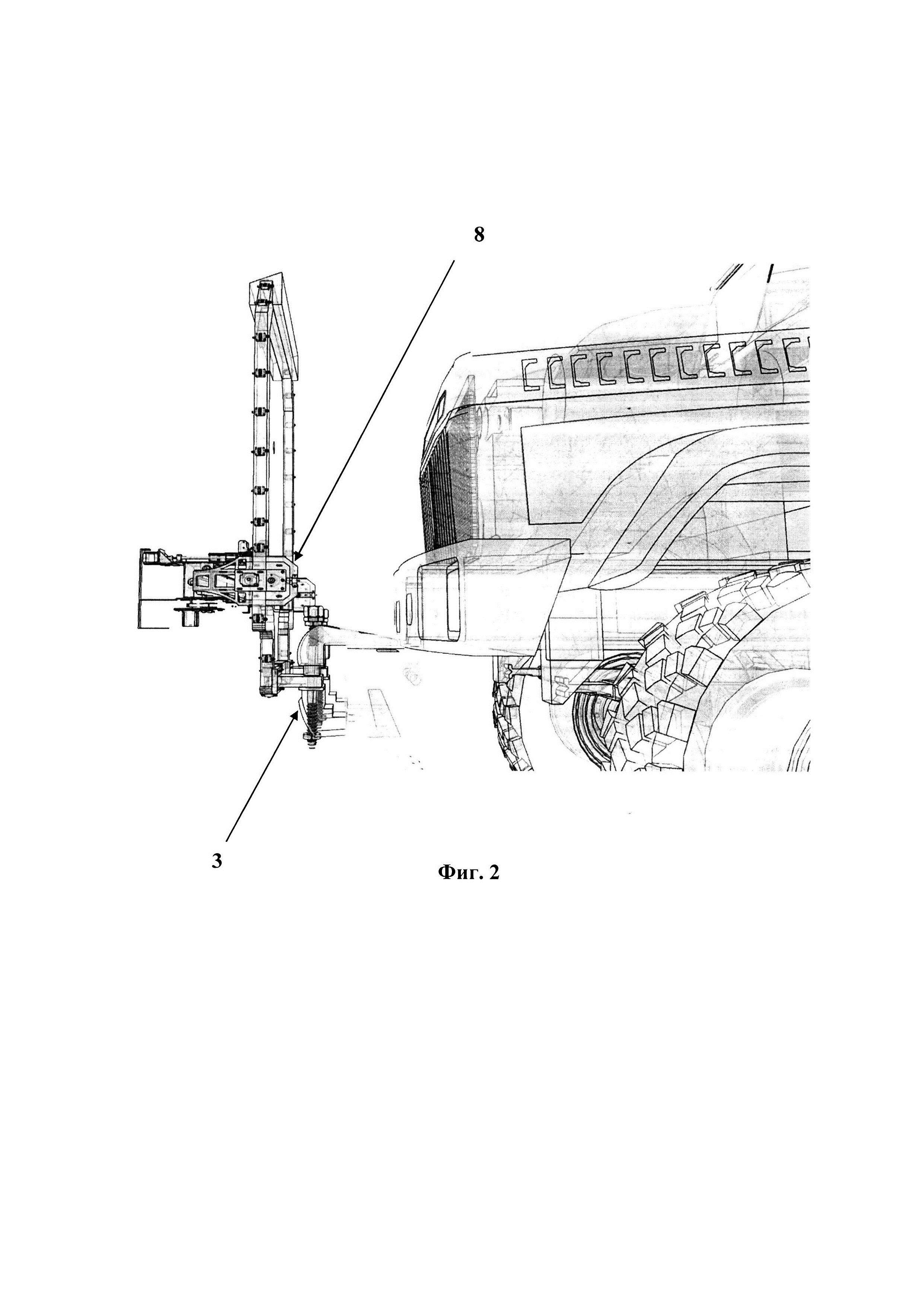
фиг. 1 изображено транспортное средство на комбинированном ходу с установленным на передней части навесного блока для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта; фиг. 2 изображен порядок крепления навесного блока для
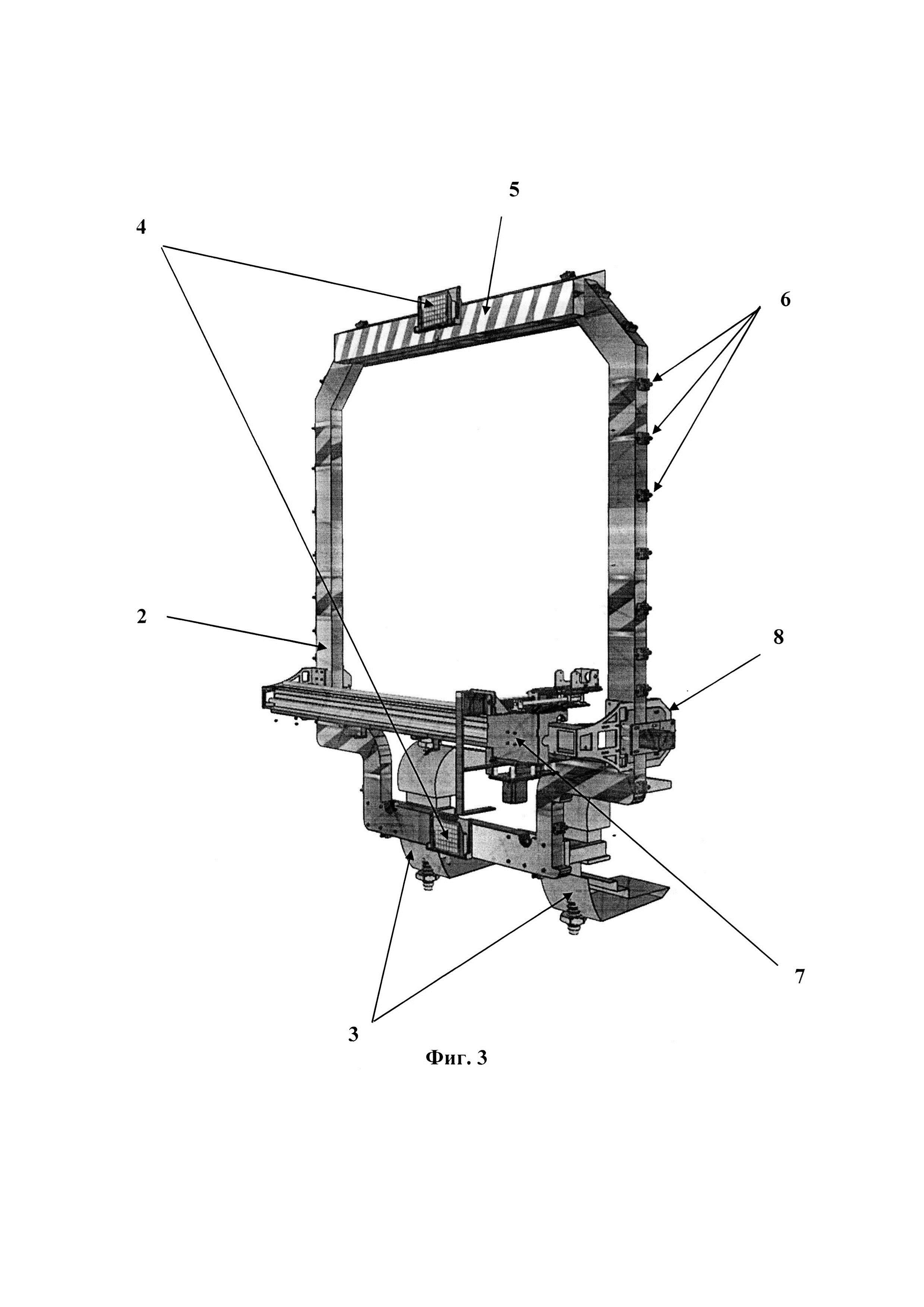
бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта на передний буфер транспортного средства (вид сбоку); фиг. 3 изображен навесной блок для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта (вид сбоку); поз. 1 - передний буфер транспортного средства, на который крепится конструкция навесного блока; поз. 2 - П-образный аллюминивый каркас, с установленным на него оборудованием; поз. 3 - крепления зажимные винтовые, для удерживания конструкции на переднем буфере транспортного средства; поз. 4 - устройство для бесконтактного цифрового сканирования форм объектов (3D - сканер) со встроенным конусообразным полем зрения с возможностью построения трехмерных моделей; поз. 5 - подвижная планка для настройки углов и высоты цифрового сканирования форм объектов; поз. 6 - лазерные высокоточные сканеры (триангуляционные датчики), для бесконтактного контроля профиля поверхности, габаритов приближения строения, геометрических размеров сканируемых объектов, распознавания технологических объектов на железной дороге; поз. 7 - блок управления и хранения информации записываемой в процессе съемки пройденного участка, с установленными портативной аккумуляторной батарей и маршрутизатором позволяющим осуществлять передачу данных на сервер; поз. 8 - кронштейны для крепления конструкции на вертикальных плоскостях.
Использованная литература
1. Электронный ресурс: https://ru.d-test.ru/catalog/lazernoe_izmeritel_noe_oborudovanie/
2. Наземное лазерное сканирование: монография / В.А. Середович, А.В. Комиссаров, Д.В. Комиссаров, Т.А. Широкова. - Новосибирск: СГГА, 2009. - 261 с.
3. Электронный ресурс: http://www.alfa-pribor.ru/products/automated-inspection-system/.
4. Электронный ресурс: http://www.germany-electric.ru/267.
5. Электронный ресурс: https://sensotek.ru/catalos/akltec/section_6130/apache-portal/.
6. Патент Российской Федерации на полезную модель (19) RU (11) 109719 (13) U1.
7. Патент Российской Федерации на полезную модель (19) RU (11) 183755 (13) U1.
Реферат
Полезная модель относится к устройствам бесконтактного контроля и определения габаритности, геометрических параметров и физических свойств строений на железной дороге. Устройство предназначено для сканирования и формирования трехмерной модели при определении предельного поперечного перпендикулярного оси пути очертания и геометрических параметров верхнего строения пути на железнодорожных перегонах и станциях без применения специальных вагонов-путеизмерителей. Техническим результатом, на достижение которого направлено создание данной полезной модели, является возможность применения устройства на различных видах автомобильного и железнодорожного транспорта. Технический результат характеризуется тем, что за основу берется принцип действия устройств определения и контроля геометрических параметров железнодорожного пути, который реализуется за счет работы оптико-электронных приборов. Технической задачей полезной модели является функциональная возможность применения навесного блока для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта при сканировании и определении габаритов приближения строений различных типов (С, СП, С2501-СМ), геометрических параметров железнодорожного пути и формирования трехмерного изображения, отображающего геометрические и физические параметры сканируемых объектов на различных участках железной дороги в различных условиях местности и техническом состоянии железнодорожного пути. Техническая задача выполняется за счет того, что навесной блок для бесконтактного цифрового контроля положения сооружений и устройств железнодорожного транспорта представляет собой конструкцию из П-образного алюминиевого каркаса с быстросъемными зажимными винтовыми креплениями для переднего буфера транспортных средств, а также кронштейнами для крепления конструкции на вертикальных плоскостях железнодорожного транспорта. Такие крепления позволяют использовать данную конструкцию на разных видах автомобильного (оборудованного комбинированным ходом) и железнодорожного транспорта. Благодаря конструктивным особенностям навесного блока повышается достоверность результатов сканирования и увеличиваются возможности применения данного устройства на различных видах транспортных средств в труднодоступных и на поврежденных участках железной дороги при любых климатических условиях без привлечения специальных путеизмерительных вагонов и составов.
Комментарии