Устройство перемещения телескопической колонны - RU2062749C1
Код документа: RU2062749C1
Чертежи







Описание
Настоящее изобретение касается устройства для возвратно-поступательного перемещения (называемого в дальнейшем "устройством перемещения"), которое создает узел из длинной колонны или т.п. за счет его удлинения, но без увеличения веса.
Устройство перемещения, использующее гидравлический цилиндр и винтовой шток, в основном широко используется в таких областях, как телескопическая стрела крана, телескопическая колонна, домкраты и т.п. (1).
Известное устройство перемещения выполнено так, что прочность на продольный изгиб движущегося возвратно-поступательного элемента (в дальнейшем называемого "движущимся элементом") обусловлена самими составляющими элементами, как то, цилиндром, штоком, винтовым штоком или стержнем, и т.п. которые образуют устройство перемещения. Последнее не имеет средств, усиливающих эти элементы. Если создано устройство перемещения, имеющее большую длину движения, то вес такого устройства неизбежно увеличивается. Хотя устройство перемещения с большой длиной перемещения теоретически может быть создано, однако, практически проблемы, касающиеся веса, портативности, удерживающих свойств и т.п. не могут быть решены.
Кран-ускосина, использующий известное устройство перемещения, имеет длину вылета порядка от 20 м до 30 м. Однако, кран является такого типа, который погружен исключительно на раму гусеничной тележки или транспортера на гусеничном ходу. В данной ситуации домкрат типа винтового стержня имеет величину подъема в несколько метров в равновесии между задней длиной винтового стержня и глубиной приемного гнезда.
Это объясняется тем, что, поскольку средства для обеспечения прочности на продольный изгиб обычного устройства перемещения для телескопического перемещения, не предусмотрены, несмотря на наибольшую важность прочности на продольный изгиб при создании гибкой конструкции, то собственный вес устройства должен быть увеличен.
Известно устройство перемещения телескопической колонны, содержащее гибкий движущийся элемент, связанный с приводом с возможностью возвратно-поступательного перемещения, центрирующие элементы, каждый из которых выполнен с размещенным по центру сквозным отверстием для движущегося элемента, соединенные друг с другом с возможностью перемещения совместно с движущимся элементом и изменения расстояния между ними, и средство, образующее проход для поддерживания и направления движения центрирующих элементов при их перемещении (2).
Известная конструкция имеет недостаточную жесткость.
Технический результат настоящего изобретения заключается в повышении жесткости. Это достигается тем, что в описанном выше устройстве упомянутое средство образовано телескопически связанным между собой цилиндрами, движущийся элемент выполнен в виде гибкого винта с резьбовой канавкой на наружной поверхности, образованного путем наматывания узкого материала, имеющего соответствующую форму в поперечном сечении, в спираль, гибкий винт соединен передним концом с цилиндром наименьшего диаметра, а упомянутые цилиндры выполнены со сквозными отверстиями в днищах для свободного прохождения гибкого винта, при этом центрирующие элементы размещены в соответствующих цилиндрах, а упомянутый привод содержит вращающийся гаечный элемент, взаимодействующий с резьбовой канавкой гибкого винта со стороны его заднего конца.
На каждом центрирующем элементе и соответствующем цилиндре выполнены соответственно шпонки и шпоночные канавки для поддерживания и направления движения центрирующих элементов и предотвращения относительного вращения между ними.
Телескопически связанные между собой цилиндры выполнены в поперечном сечении некруглой формы, например, эллиптической, угловой, звездообразной для предотвращения относительного вращения цилиндров.
Центрирующие элементы соединены друг с другом с помощью плоской пружины, спиральной пружины или струны или сочетания такой пружины со струной.
Устройство может быть снабжено средством для намотки и укладки гибкого винта при перемещении его назад и подачи и сматывании при перемещении его вперед.
Резьбовая канавка на наружной поверхности гибкого винта может быть выполнена в поперечном сечении, преимущественно, круглой, трапецеидальной или треугольной формы.
Внутри образованного путем наматывания узкого материала гибкого винта размещен стержень-сердечник, имеющий соответствующую форму в поперечном сечении или проволоки-сердечники.
Фиг.1 схема, иллюстрирующая принцип действия устройства.
Фиг. 2 вид в сечении, показывающий принципиальную часть узла связи гибкого винта и гайки, использующихся в устройстве настоящего изобретения.
Фиг.3 вид спереди в разрезе устройства, показывающий связь гибкого винта с приводом.
Фиг.4 вид в разрезе, показывающий принципиальную часть устройства в положении, когда телескопическая колонна с гибким винтом раздвинута.
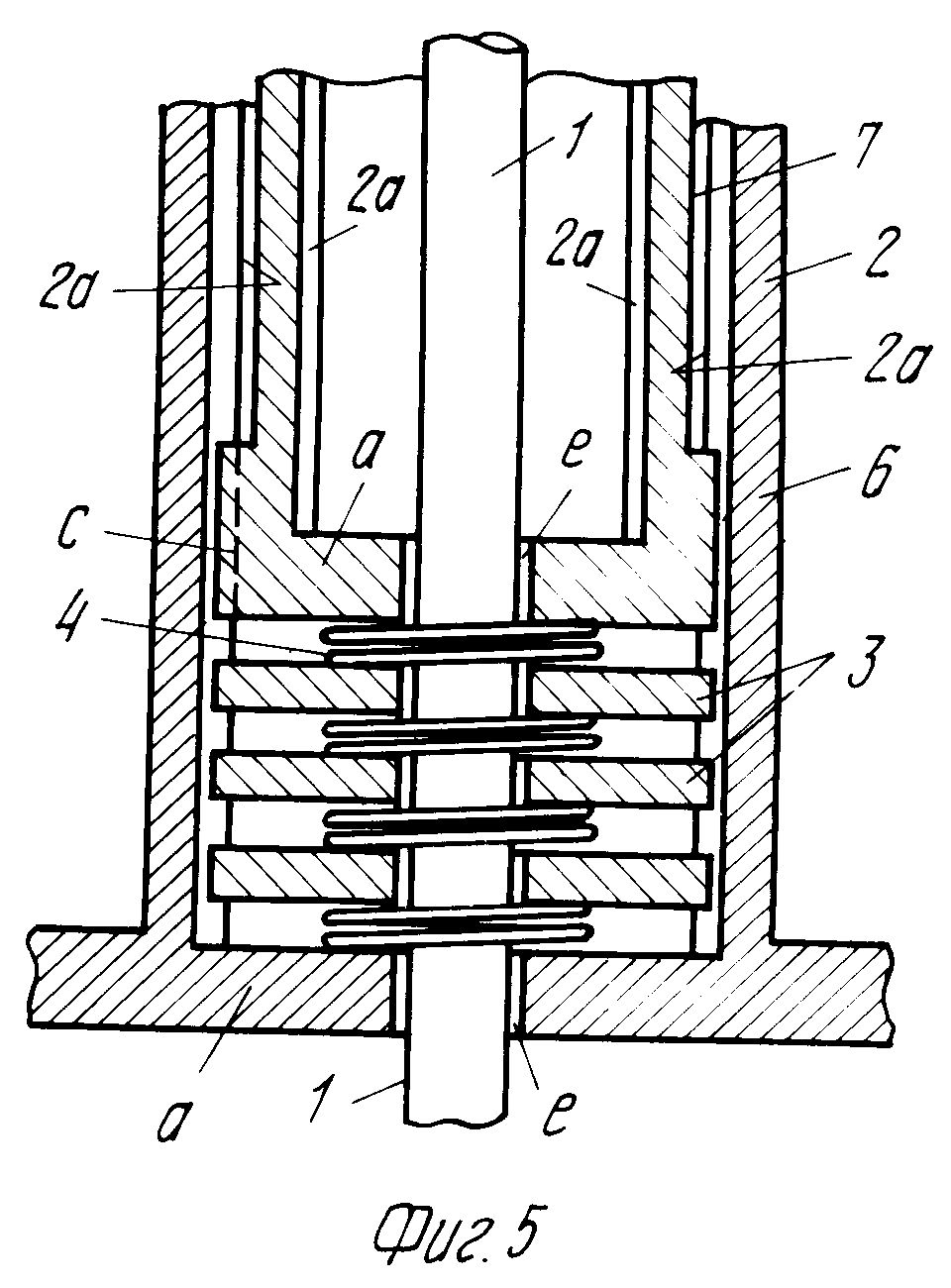
Фиг. 5 вид в разрезе той же конструкции, что и на фиг.4, но в положении, в котором телескопическая колонна сложена.
Фиг.6 вид в разрезе, выполненном по линии А-А на фиг.4
Фиг. 7 вид спереди в разрезе телескопической колонны,
образованной телескопически соединенными цилиндрами, включая верхний цилиндр.
Фиг.8 вид в сечении, выполненном по линии В-В на фиг.7.
Фиг. 9 вид в частичном сечении и увеличенном масштабе, показывающий взаимосвязь между центрирующими элементами и соединительной струной, когда проход складывается.
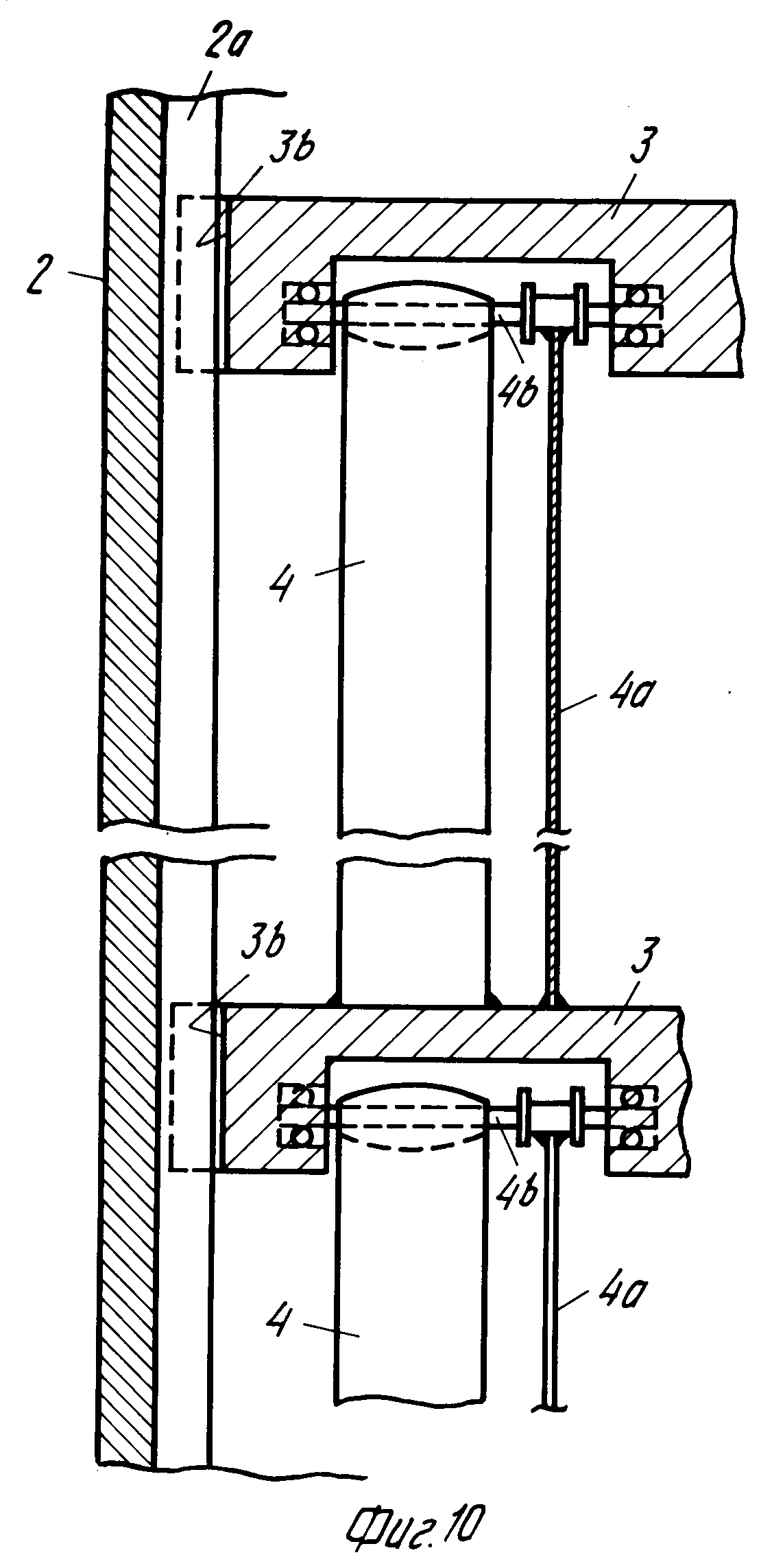
Фиг. 10 вид в частичном сечении и в увеличенном масштабе, показывающий эту же связь, но при раздвинутом проходе.
Принцип действия устройства настоящего изобретения описывается ниже со ссылками на фиг.1. В соответствии с настоящим изобретением, гибкий движущийся элемент 1 поддерживает груз W, вертикально (направление оси Z) действующий на элемент 1, и обладает прочностью на продольный изгиб устройства.
Считается, что если уравнение Эйлера применимо для длинной колонны (длинного элемента), то прочность на продольный изгиб длинной колонны обратно пропорциональна квадрату длины. Цель настоящего изобретения, направленная на достижение устройства перемещения, обладающего заданной прочностью на продольный изгиб, используя гибкий элемент, не может быть достигнута, если только промежуточная часть движущегося элемента 1 не будет поддерживаться. В настоящем изобретении этому вопросу как раз уделено внимание и промежуточная часть гибкого движущегося элемента в проходе 2 поддерживается с соответствующим шагом. Центрирующие элементы 3 используются для поддержания промежуточной части движущегося элемента 1. Термин "поддержание" означает, что движущийся элемент поддерживается так, чтобы не создавать позиционного отклонения (смещения) у движущегося элемента в направлении (плоскость X-Y) вертикально к нагрузке в системе координат.
Средство образующее проход 2 для перемещения, показанный на фиг.1, удерживает и направляет центрирующие элементы 3, движущиеся и расположенные с соответствующим шагом. Поскольку, центрирующие элементы 3 соединены друг с другом с помощью соединительных струн 4, 4а (см. также фиг.9, 10), то они синхронно движутся в проходе 2 при перемещении вперед назад движущегося элемента 1 так, чтобы поддержать элемент 1 с соответствующим шагом в центре прохода 2 во время перемещения вперед движущегося элемента 1, и для замены прочности на продольный изгиб движущегося элемента 1 прочностью на продольный изгиб перекрытий, соответственно поддерживаемых центрирующими элементами 3, но не по всей длине движущегося элемента 1.
Каждый из центрирующих элементов 3 снабжен сквозным отверстием 3а для свободного прохождения через него длинного элемента 1 и для его направления по центру; шпоночной канавкой 3b, служащей для запирания прохода 2; соединительными струнами 4, содержащими выпуклую плоскую спиральную пружину, обладающую саморазматывающим усилием, и дополнительную пружину 4а для определения шага центрирующих элементов 3 и для определения подачи соединительной струны на их длину (см. фиг.9, 10). Выпуклая соединительная струна 4 не вытягивается на всю длину, а закреплена на валу 4b вместе с дополнительной или вспомогательной струной 4а для гарантирования саморазматывающего усилия. Цифрой 2а обозначена выступающая шпоночная планка, выполненная на внутренней поверхности прохода 2 в соответствии со шпоночной канавкой 3b.
Приводная часть 5 служит для перемещения вверх и вниз движущегося элемента 1. Приводная часть 5 содержит вращающуюся гайку, при этом движущийся элемент 1 является винтом, приводная часть может быть вращающимся подающим приводным роликом, если элемент 1 является струной или лентой, или вращающейся шестерней, если элемент 1 является зубчатой рейкой.
Если движущийся элемент 1 является негибким элементом, то устройство перемещения настоящего изобретения также может применяться. Когда движущийся элемент является негибким элементом, то устройство настоящего изобретения может реализоваться в ходовом винте или винтовом домкрате, имеющем длинный ход подачи и более высокий ход подъема за счет использования более длинного и тонкого винтового движущегося элемента, чем в обычном механизме ходового винта, использующем жесткий винтовой стержень, или винтовом домкрате, применяющем жесткий винтовой стержень.
Однако, если движущийся элемент 1 является негибким, то необходимо иметь пространство на заднем конце прохода под движущийся элемент 1. Если же подвижный элемент 1 является гибким элементом, то приемная часть, как например, катушка или аналогичное приспособление, размещается на конце прохода перемещения благодаря чему экономится пространство. Ниже приводится описание подвижного устройства настоящего изобретения, в котором используется гибкий движущийся элемент 1.
На фиг.2 приведен пример механизма ходового финта, который используется в качестве гибкого подвижного элемента 1, т.е. гибкого винта (обозначенного в дальнейшем цифрой 1).
Как показано на фиг.2, гибкий винт 1 содержит стальной узкий материал 1а, плотно завитый в длинную спираль, и имеющий резьбовую канавку 1b для передвижения шариков, выполненную на наружной периферии вдоль линии соединения узкого материала с целью формирования примера гибкого движущегося элемента настоящего изобретения. Пример, показанный на фиг.2, использует узкий материал 1, наружная поверхность которого предварительно обработана для получения резьбовой канавки так, чтобы резьбовая канавка 1b формировалась при скручивании узкого материала 1а в спираль, при этом последний может иметь соответствующую угловую форму в сечении, например, прямоугольную форму, трапециевидную форму и т.п.
Хотя гибкий элемент 1, выполненный как описано выше, имеет по существу такой же внешний вид, что и винт, образованный обычным стержнем, однако, гибкий винт 1 обладает гибкостью в осевом направлении, благодаря тому, что он получен путем закручивания узкого материала 1а в спираль.
Как показано на фиг.2, вращающаяся гайка, с которой взаимодействует винт 1, служит в качестве приводной части 5. Гайка содержит короткий цилиндрический корпус 5а, имеющий отверстие, диаметр которого обеспечивает свободное похождение гибкого вала 1, и много шариков 5b, располагающихся по спирали вдоль резьбовой канавки 1b на внутренней поверхности корпуса 5а и циркулирующих в корпусе 5а. Цифрой 5с обозначена наружная шестерня выполненная в виде фланца на наружной периферии корпуса 5а гайки так, чтобы обеспечить подвод вращательного усилия снаружи.
Хотя гайка содержит вращающуюся гайку, имеющую шарики 5b, гаечный элемент 5а, в котором входящий винт (не показан) взаимодействует с винтовой канавкой 1b гибкого винта 1, спирально выполненной непосредственно на его внутренней поверхности, гаечный элемент 5а может иметь струну (не показана), выполненную спиральной из соответствующей искусственной смолы и прикрепленным к внутренней поверхности корпуса 5а гайки вместо шариков 5b, которая может использоваться с гибким винтом 1, применяющимся в настоящем изобретении. В качестве материала для струны может быть использован соответствующий металл, керамика или композитный материал на их основе, но отличный от искусственной смолы.
Поскольку гибкий винт 1, образованный закручиванием узкого материала в спираль с целью образования длинного движущегося элемента, является полым, то внутрь гибкого винта 1 может вставляться сердечник (не показан) плотно контактирующий с его внутренней поверхностью. Примером такого сердечника может служить гибкая труба (не показана), имеющая винтового типа выпуклую полосу, взаимодействующую с резьбовой канавкой, выполненной вдоль линии стыка узкого материала 1а на внутренней стороне гибкого винта 1.
Когда сердечником, вставленным в гибкий винт 1, является гибкая труба, то жидкость может нагнетаться в трубу, благодаря чему она может легко подаваться и удаляться, такая конструкция является полезной для достижения прочности на продольный изгиб, когда требуется намотать весь гибкий винт 1 на катушку или аналогичное приспособление или сматывать гибкий винт 1 с нее с сохранением прямолинейного состояния. Кроме того, сердечник может изготавливаться из сплава, обладающего памятью формы, а температурные условия, позволяющие памяти сплава вернуть линейную форму при определенном температурном режиме, создаются в части, где гибкий винт 1, намотанный на катушку или барабан, выпрямляется.
На фиг.2 гаечный элемент, навинченный на гибкий винт 1 с помощью шариков 5b, нормально и реверсивно вращается в заданном положении за счет передачи вращательного выходного усилия от двигателя 5d гаечному элементу с тем, чтобы перемещать вперед и назад гибкий винт 1, который останавливается за счет наматывания его заднего конца 1b в проходе перемещения 2, как показано на фиг. 3. На фиг.3 цифрой 5c обозначена выходная шестерня. Эти элементы и гаечный элемент образуют приводную часть 5 перемещения винта 1.
Как показано на фиг.3, корпус 5а гайки вращательно установлен в заданном положении на нижнем конце прохода перемещения 2 с помощью подшипника 5f или аналогичного приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого приспособления. Гибкий винт 1 ввинчивается в гайку. Задний конец 1b гибкого винта, ввинченный в гайку, поворачивается на 90o и наматывается или змеевидно сворачивается сразу же ниже гайки, благодаря своей гибкости, а его передний конец 1а, проходящий через гайку, перемещается вперед и назад в проходе перемещения 2.
Как показано на фиг.3 каждый из центрирующих элементов 3 выполнен так, что гибкий винт 1 проходит с возможностью перемещения через их центральную часть. Центрирующие элементы 3 соединены друг с другом с помощью соединительной струны 4 типа спиральной пружины. Однако, предпочтительно центрирующие элементы должны быть соединены друг с другом с помощью выпуклого соединения 4, обладающего саморазматывающим усилием, и вспомогательной струной 4а для определения длины, как показано на фиг.1.
В устройстве, показанном на фиг.3, перемещаемый объект W, служащий в качестве груза, который нужно перемещать вперед и назад, установлен на переднем конце 1а гибкого винта 1, в результате чего объект W может двигаться в проходе перемещения 2 вместе с передним концом винта 1 за счет перемещения последнего в проходе 2.
В этом устройстве используется длинный гибкий винт 1 для увеличения величины перемещения винта 1 и увеличения поднимаемой величины объекта W. Центрирующие элементы 3, подвижно контактирующие с наружной периферией винта 1 с соответствующим шагом, служат для поддерживания винта 1 по всей его длине с соответствующими интервалами по центру прохода 2 и для предотвращения изгибания винта 1, обусловленного действием нагрузки от объекта W.
Каждый из центрирующих элементов 3 имеет сквозное отверстие 3с для направления гибкого винта 1 по центру и фиксируется и поддерживается на стороне его наружной периферии с помощью средства, образующего проход 2 перемещения винта 1 поверхностью стенки, с тем, чтобы иметь возможность скользящего передвижения в направление перемещения, используя взаимодействие шпонки 2а со шпоночной канавкой 3b, как показано на фиг.1. Большое число центрирующих элементов 3 поддерживается в свою очередь ниже объекта W с помощью соединений 4, каждое из которых имеет заданную длину, в результате чего они могут перемещаться и располагаться с соответствующим шагом в проходе 2 перемещения за счет перемещения вверх вниз 1. Таким образом, винт 1 поддерживается с интервалами центрирующих элементов в проходе 2 перемещения, не вызывая смещения его центра в поисках координат. Это позволяет устранить продольный изгиб винта 1, обусловленный грузом W.
Как описано выше со ссылками на фиг.3, в устройстве настоящего изобретения, использующем гибкий винт, центр винта 1 поддерживается центрирующими элементами 3 в проходе 2 перемещения, при этом передний конец 1а является направляющим в перемещении со стороны подачи. Кроме того, поскольку гибкий винт 1 может свободно перемещаться вперед и назад, поддерживаемый при этом в его средних частях с соответствующим шагом, перемещение самого прохода 2 перемещения 2 делается гибким (подвижным) с помощью средства, состоящего из телескопических цилиндров 6, 7. как показано в качестве приема на фиг.4, 5, в результате чего устройство настоящего изобретения может использоваться в качестве механизма перемещения для установки, содержащей телескопический проход 2 перемещения в качестве телескопической колонны. Пример устройства настоящего изобретения, содержащего средство, образующее проход 2 перемещения, служащее в качестве колонны, образованной телескопически соединенными цилиндрами, описывается ниже со ссылками на фиг.4 6.
На фиг. 4 цифры 6, 7. соответственно обозначают части телескопически соединенных цилиндров, имеющих различные диаметры; цилиндр 7 имеет меньший диаметр и вставлен в цилиндр 6, имеющий больший диаметр с возможностью вертикального скольжения, но несъемно. Хотя весь телескопический цилиндр, образующий проход 2 перемещения в устройстве перемещения, не показаны на чертеже, однако большое число цилиндров, имеющих различные диаметры, последовательно и свободно вставлены также, как цилиндры 6, 7. показанные на чертеже, для образования телескопического цилиндра.
Каждый из цилиндров 6, 7. телескопического цилиндра имеет нижнюю плиту или днище a, наружные фланцы b, c, выполненные на верхнем и нижнем концах, и внутренний фланец d на их верхнем конце. Наружный фланец c с нижнего конца вставленного цилиндра и внутренний фланец d верхнего цилиндра служит для запирания обоих цилиндров. Буквой e обозначено сквозное отверстие для гибкого винта 1, выполненное в центре днища d каждого цилиндра.
В настоящем изобретении обычная телескопическая колонна имеет конструкцию, в которой ходовой винт поддерживается только основанием каждого из цилиндров и тем самым не имеет большого удлинения и большого соотношения свободной длины к радиусу инерции.
Каждый из цилиндров 6, 7. образующих телескопический цилиндр и большое число центрирующих элементов перемещается синхронно с формированием прохода 2 за счет телескопического перемещения и размещения с соответствующим шагом для поддержания средней части длинного тонкого движущегося элемента в виде гибкого винта. Настоящее изобретение обеспечивает формирование телескопической колонны, имеющей большую величину перемещения, т.е. высокое соотношение свободной длины к радиусу инерции, что может быть реализовано с помощью известных устройств. Получаемая телескопическая колонна обладает прочностью на продольный изгиб и изгибной жесткостью, удовлетворяющих практическим целям.
Как показано на фиг.6, каждый из центрирующих элементов 3 является таким же, как показаны на фиг. 1 и 3, в том плане, что каждый из них имеет размер, обеспечивающий его плотную установку в цилиндре 6 и в том, что каждый из центрирующих элементов 3 снабжен шпоночными канавками 3b, свободно взаимодействующими с выступающими шпоночными планками 2а, выполненными на внутренней поверхности цилиндра 6, и сквозным отверстием 3а, выполненным в его цилиндре, для свободного прохождения через него и направления гибкого винта 1. Центрирующие элементы 3 установлены в каждом из цилиндров 6, 7. имеющих различные диаметры соответственно, имеют наружные диаметры, соответствующие внутренним диаметрам цилиндров 6, 7. Для практического использования предпочтительно, чтобы каждое сквозное отверстие 3а и отверстие для свободного прохождения гибкого винта 1 имело бы втулку, изготовленную из из материала, обладающего низким сопротивлением скольжению, или вращающуюся втулку с подшипником, взаимодействующую с гибким валом 1 (на чертеже не показано).
В конструкции, показанной на фиг.4, 5 три центрирующих элемента установлены в каждом из цилиндров 6, 7 являющихся составными элементами телескопического цилиндра. Каждый из центрирующих элементов 3 соединен с верхним центрирующим элементом 3 с помощью соединительной струны 4, а самый верхний центрирующий элемент 3 соединен с нижней поверхностью днища а меньшего цилиндра, вставленного в рассматриваемый цилиндр, с помощью соединительной струны 4. Число центрирующих элементов 3, устанавливаемых в одном цилиндре может быть любым в зависимости от длины каждого цилиндра и поднимаемой нагрузки.
В вышеприведенной конструкции, цилиндры 6, 7. телескопического цилиндра последовательно вставляются так, чтобы цилиндр, имеющий меньший диаметр, свободно вставляется в цилиндр большего диаметра. Когда цилиндр, имеющий меньший диаметр, выдвигается вверх под действием перемещения вверх гибкого винта 1, то наружный фланец c на нижнем конце этого цилиндра взаимодействует с внутренним фланцем d на верхнем конце следующего цилиндра, имеющего больший диаметр. Нижние концы цилиндров меньшего диаметра последовательно взаимодействуют и тянут вверх верхние концы цилиндров большего диаметра для формирования прохода перемещения за счет телескопического движения.
В устройстве настоящего изобретения, показанном на фиг.4, передний конец 1а (не показан) гибкого винта 1 может первым крепится к задней стороне днища ["a"] цилиндра, имеющего наименьший диаметр. Поскольку днища ["a"] всех остальных цилиндров и центрирующие элементы при этом имеют сквозные отверстия e и 3а соответственно для свободного прохождения через них винта 1, то последний подвижно удерживается по центру каждого из цилиндров за исключением самого верхнего цилиндра и проходит весь телескопический цилиндр. Хотя на фиг. 5 не показано, задний конец 1b гибкого винта 1 наматывается на приемный барабан, установленном в пространстве устройства, на котором смонтирован вертикально самый нижний цилиндр. Хотя на чертеже не показано, предпочтительно иметь трубу для свободного прохождения через нее гибкого винта через центр самого верхнего цилиндра вместо центрирующего элемента.
С другой стороны, гаечный элемент установлен в отделении устройства, в результате чего вращение передается от двигателя 5d, снабженного системой передач, показанной на фиг.4. Система передач может иметь любую требуемую конструкцию.
Работа устройства осуществляется следующим образом. В вышеприведенной конструкции, когда двигатель 5 нормально вращается и вращение передается гаечному элементу 5а в состоянии, когда цилиндры 6, 7. не выдвинуты, как показано на фиг.5, то перемещение вверх верхнего конца 1а (не показан) гибкого винта 1 начинается за счет вращения гаечного элемента 5а. В состоянии, показанном на фиг. 6, в котором телескопический цилиндр сложен, центрирующие элементы 3 в цилиндрах 6, 7. располагаются слоями между нижней стороной днища ["а"] верхнего цилиндра и верхней поверхностью днища а нижнего цилиндра. Перемещение вверх гибкого винта 1 вызывает перемещение вверх цилиндра, имеющего наименьший диаметр в следующем цилиндре, имеющим больший диаметр. Когда наружный фланец с на нижнем конце цилиндра, имеющего меньший диаметр, достигает внутреннего фланца b на верхнем конце цилиндра, имеющего больший диаметр, то цилиндр 6, имеющий больший диаметр, перемещается вверх за счет перемещения вверх гибкого винта 1. Перемещение гибкого винта 1 вверх заставляет цилиндры, имеющие меньший диаметр, последовательно перемещать вверх цилиндры, имеющие большие диаметры. Выдвинутый таким образом телескопический цилиндр имеет проход перемещения 2 для винта 1, сформированный в цилиндре и обеспечивается внешний вид раздвинутой вертикальной колонны. В то же время центрирующие элементы 3 в каждом из цилиндров 6, 7. перемещаются вверх в цилиндре, в котором центрирующие элементы 3 установлены, за счет перемещения вверх цилиндра выше рассматриваемого цилиндра и размещаются с равными шагами в соответствии с длиной каждого соединения 4, 4а.
В процессе вышеуказанного удлинения, гибкий винт 1 перемещается вертикально вверх за счет центрирующих элементов, не вызывая каких-либо смещений в плоскости XY. Таким образом, гибкий винт 1 поддерживается в нескольких местах своей средней части с соответствующими интервалами с помощью днища а каждого цилиндра и большим числом центрирующих элементов 3, установленных в каждом из цилиндров 6, 7.
Когда гибкий винт 1 удлиняется, сопровождая перемещение вверх каждого из цилиндров 6, 7. то многочисленные центрирующие элементы 3, установленные в каждом из цилиндров 6, 7. последовательно движутся в каждом из цилиндров и располагаются с соответствующим шагом в каждом из цилиндров 6, 7. Это значительно повышает прочность на продольный изгиб всего гибкого винта 1. В этом случае, каждый из цилиндров должен быть выполнен так, чтобы он имел толщину и диаметр, достаточные для противостояния боковой нагрузке. Однако, поскольку изгибная жесткость цилиндра пропорциональна диаметру в кубе и толщине, то эта цель достигается за счет применения цилиндра, имеющего относительно небольшую толщину и относительно большой диаметр в диапазоне, не создающем местного продольного изгиба, что приводит к снижению общего веса.
Когда колонна, образованная выдвинутыми цилиндрами 6, 7. т.е. проход перемещения 2, сформированный телескопическим движением, складывается и складируется, то гаечный элемент 5 вращается в направлении, обратном тому, что при перемещении вверх, в результате чего передний конец 1а гибкого винта 1 движется вниз, а гибкий винт 1 наматывается на барабан в отделение устройства. Это приводит к тому, что цилиндры 6, 7. последовательно возвращаются и входят в цилиндры, имеющие большие диаметры. Когда цилиндры движутся вниз и сжимаются со стороны меньшего диаметра, то центрирующие элементы 3 в каждом из цилиндров, перемещаются в них в сторону их днища под действием днища а верхнего цилиндра, сопровождающего перемещение вниз каждого из цилиндров 6, 7.
В устройстве перемещения настоящего изобретения, содержащим в качестве главных элементов гибкий винт 1, служащий в качестве движущегося элемента, гаечный элемент 5а, являющийся движущей силой перемещения, и центрирующие элементы 3, проход перемещения 2, образованный большим числом цилиндров 6, 7. составленных телескопически, формируется за счет телескопического перемещения, синхронно с движением винта 1. Устройство настоящего изобретения может использоваться, таким образом, как механизм телескопической колонны, содержащий телескопический цилиндр в качестве телескопической колонны. Когда каждый из цилиндров 6, 7. телескопического цилиндра имеет цилиндрическую форму, то запирающий механизма образуется за счет взаимодействия между шпонкой и шпоночной канавкой, соответственно выполненных на внутренней и наружной поверхностях каждого цилиндра. Однако, если каждый из цилиндров является угловой формы, то запирающий механизм не нужен. Наружная поверхность на нижнем конце каждого цилиндра и внутренняя поверхность на их верхнем конце может быть выполнена на конус для более близкого соединения соответствующих цилиндров, когда телескопический цилиндр образует вертикальную колонну за счет удлинения.
На фиг.8 наглядно показано соединение всех цилиндров 6, 7. между собой. Однако на этой фигуре показана другая конструкция движущегося элемента 1. В качестве движущего элемента 1 использован выпуклый элемент (см. фиг.7, 8).
В этом случае, приводная часть 5 перемещения содержит, например, приводной ролик 5h и прижимной ролик 5g, установленный напротив приводного ролика 5h с целью зажатия между ними выпуклого движущегося элемента 1 и для его перемещения вперед и назад. Цифрой 5i обозначен направляющий ролик. Форма сквозных отверстий 3а, выполненных в центре каждого днища а цилиндров 6, 7. и центрирующих элементов 3, соответствует форме в поперечном сечении движущегося элемента 1. Другие части являются такими же, как в устройстве на фиг.4-6.
В устройстве перемещения настоящего изобретения проход 2 перемещения, образованный телескопическим цилиндром, выполнен так, чтобы обладать изгибной жесткостью, требующейся для гибкой конструкции, а движущийся элемент, гибкий винт, движущийся в проводе перемещения, выполнен так, чтобы иметь прочность на продольный изгиб, который может быть осуществлен весом цилиндра, собственным весом гибкого винта и нагрузкой от осветительной лампы или т.п. находящимся на верху телескопической колонны и действующим на нее в осевом направлении.
Таким образом, проход перемещения и движущийся элемент обладают изгибной жесткостью и прочностью на продольный изгиб, которые требуются для гибкой конструкции. Например, большое число центрирующих элементов, скользящих в осевом направлении цилиндров и каждый из которых снабжен выполненным по его центру сквозным отверстием для гибкого винта, предусмотрено в каждом из цилиндров, формирующих проход перемещения, и соединены, например, с помощью плоской спиральной пружины и струны, в результате чего центрирующие элементы блокируют перемещение гибкого винта и располагаются с заданными интервалами, когда телескопическая колонна раздвигается. Прочность на продольный изгиб движущегося элемента может таким образом, существенно увеличиваться за счет функционирования центрирующих элементов по сравнению со случаем без центрирующих элементов.
Это объясняется тем, что поскольку прочность на продольный изгиб гибкой конструкции обратно пропорциональна квадрату длины конструкции, что в общем известно, длина гибкого винта, связанная с прочностью на продольный изгиб, приближается к расстоянию между соответствующими центрирующими элементами, а не ко всей длине винта, благодаря центрирующим элементам для закрепления прохода перемещения для гибкого винта в центре каждого цилиндра, имеющего достаточную изгибную жесткость. Это положение было экспериментально подтверждено изобретателями.
Хотя допустимая подъемная нагрузка винтового домкрата, имеющего по существу трапецеидальный винт, уменьшается с увеличением длины винтового стержня, если диаметр винтового стержня остается тем же, то наличие прохода перемещения и центрирующих элементов настоящего изобретения позволяет сохранить допустимую подъемную нагрузку постоянной несмотря на дину винтового стержня.
Когда используется гибкий движущийся элемент, то настоящее изобретение имеет большое преимущество, заключающееся в том, что длинная телескопическая колонна может формироваться путем наматывания или подачи этого элемента. Поскольку гибкий подвижной элемент обычно обладает более низкой прочностью на продольный изгиб, чем жесткие подвижные элементы, то прочность на продольный изгиб должна быть увеличена за счет использования конструкции настоящего изобретения.
Как отмечалось выше, в устройстве настоящего изобретения средство, образующее проход перемещения и движущийся элемент соответственно обладают изгибной жесткостью и прочностью на продольный изгиб, причем последняя может быть еще повышена путем сочетания подвижных центрирующих элементов. Таким образом, обеспечивается возможность получения идеальной длинной телескопической колонны, имеющей высокий коэффициент удлинения, легкий вес и большой нагружаемый вес. ЫЫЫ2 ЫЫЫ4 ЫЫЫ6 ЫЫЫ8
Реферат
Использование: изобретение относится к устройству удлинения (перемещения) колонн, обеспечивающему возможность быть портативным, находясь в сложенном состоянии, при этом оно может формироваться в более длинную высокую колонну, чем обычная складывающаяся колонна, и может реализовать большую величину перемещения без увеличения веса колонны. Сущность изобретения: устройство перемещения содержит гибкий движущийся элемент, приводную часть для перемещения движущегося элемента; большое число центрирующих элементов, каждый из которых снабжен выполненными по их центру сквозными отверстиями для движущегося элемента, соединенных друг с другом и перемещающихся совместно с передвижением движущегося элемента, так что расстояние между соответствующими центрирующими элементами может изменяться, и средство, образующее проход, предназначенный для поддерживания и напряжения движения центрирующих элементов. 6 з.п. ф-лы, 10 ил.

Комментарии