Сверхтонкое устройство для парковки и доступа к транспортному средству с полностью плавающими механическими манипуляторами - RU2465424C2
Код документа: RU2465424C2
Чертежи







Описание
Область техники
Настоящее изобретение относится к трехмерному устройству для парковки транспортного средства, в частности к сверхтонкому устройству для парковки и доступа к транспортному средству с полностью плавающими механическими манипуляторами.
Уровень техники
Как известно, процветание общества делает персональные автомобили все более и более популярными, что приводит к серьезным проблемам с парковкой в крупных и средних городах. Для решения этой проблемы в последнее время разработаны парковочные устройства многих типов. Помимо других происходит быстрое развитие крупных передвижных парковочных устройств наземного типа и многосекционных парковок. Однако эти дорогостоящие устройства имеют несколько недостатков, таких как большие затраты на строительство, трудности с ремонтом и техническим обслуживанием, длительное время работы при парковке и получении транспортных средств.
В китайском патенте ZL 200620041779.2 раскрыто устройство для парковки и доступа к транспортному средству с механическим манипулятором и удерживающими фрикционными колесами, которое имеет передвижной механизм, установленный на подвижную тележку, сцепку с платформой для автомобиля и ее ходовой механизм. Передвижной механизм содержит локомотивный двигатель, закрепленный на подвижной тележке, зубчатое колесо, приводимое в движение локомотивным двигателем, рейку в зацеплении с зубчатым колесом и тягу, соединенную с рейкой. Сцепка с платформой для автомобиля и ходовой механизм имеет одну или больше подвижных скоб, соединенных с тягой, и рычажное устройство фрикционного колеса, расположенное на подвижной скобе. Рычажное устройство фрикционного колеса может входить в фрикционную панель, установленную на нижней стороне платформы для автомобиля. Несмотря на то что устройство, раскрытое в этом патенте, имеет некоторые преимущества, оно должно быть оснащено платформой для автомобиля и зубчатой рейкой, что делает эту конструкцию дорогой и сложной.
Раскрытие изобретения
Настоящее изобретение относится к сверхтонкому устройству для парковки и доступа к транспортному средству с полностью плавающими механическими манипуляторами. Парковочное устройство, использующее устройство согласно изобретению, обходится без платформы для автомобиля и зубчатой рейки. Поэтому такое парковочное устройство имеет преимущества низкой стоимости строительства, низкой стоимости устройства, небольшого времени парковки и доступа и хорошей возможности технического обслуживания.
Для решения вышеупомянутых технических проблем техническое решение согласно изобретению отличается ультратонкой конструкцией и имеет движущуюся продольно каретку с двумя полностью плавающими механическими манипуляторами, расположенными симметрично на ее сторонах;
упомянутая движущаяся продольно каретка включает нижнюю раму, приводной двигатель для ходового механизма, приводное колесо, которое поддерживает нижнюю раму, приводной вал для приводного колеса и приводное зубчатое колесо для приводного колеса, причем нижняя рама имеет на ее сторонах приводные двигатели, и эти приводные двигатели обеспечивают вращение упомянутых приводных колес посредством приводного вала и приводного зубчатого колеса;
и упомянутый полностью плавающий механический манипулятор состоит из механического рычага, передаточного механизма механического рычага, скользящей панели для толкания механического манипулятора, прямолинейного направляющего рельса и направляющую канавку для поворотного рычага, которые выполнены соответственно на внутренней и наружной сторонах продольной балки упомянутой нижней рамы упомянутой каретки; четыре симметрично расположенных механических рычага и две скользящие панели выполнены на любой стороне линии, проходящей через средние точки продольной балки нижней рамы, причем каждая из двух скользящих панелей соединена на каждой ее стороне с механическим рычагом через пальцевый вал; две скользящие панели на одной стороне скользяще введены в зацепление с нижней рамой каретки посредством прямолинейного направляющего рельса; две скользящие панели имеют между ними передаточный механизм механического рычага; этот передаточный механизм механического рычага, который скользяще контактирует с нижней рамой также посредством упомянутого прямоугольного направляющего рельса, приводит в движение две скользящие панели на одной стороне в поступательное движение посредством левовращающего шарикового винта и правовращающего шарикового винта соответственно; каждый механический рычаг снабжен по меньшей мере тремя роликами, которые могут свободно вращаться; эти ролики поднимают колеса автомобиля, отрывая их от земли, когда механические рычаги захватывают и зажимают колеса автомобиля; каждый механический рычаг снабжен промежуточными колесами в месте колена на его внутренней стороне; эти промежуточные колеса в месте колена движутся по кривым направляющих канавок поворотного рычага, и упомянутые скользящие панели приводят в движение упомянутые механические рычаги.
В упомянутом сверхтонком устройстве для парковки и доступа с полностью плавающими механическими манипуляторами упомянутый передаточный механизм оснащен по меньшей мере четырьмя запирающими и толкающими стержнями для фиксирующих лап; каждая скользящая панель имеет под ней две симметричные фиксирующие лапы; и в том случае, когда механические рычаги захватывают колеса автомобиля, запирающие и толкающие стержни толкают фиксирующие лапы так, чтобы четыре фиксирующие лапы были прижаты к двум продольным балкам нижней рамы, чем создается двунаправленное запирающее состояние.
В упомянутом сверхтонком устройстве для парковки и доступа с полностью плавающими механическими манипуляторами упомянутые механические рычаги снабжены шарнирными пальцами в их коленной части; продольная балка нижней рамы снабжена группами колес, поддерживающих поворотный рычаг на ее наружной стороне; и наружный конец упомянутого механического рычага способен подниматься на шарнирном пальце под действием этих групп колес, поддерживающих поворотный рычаг. В упомянутом сверхтонком устройстве для парковки и доступа с полностью плавающими механическими манипуляторами две продольные балки нижней рамы снабжены четырьмя приводными колесами в их средней части. В упомянутом сверхтонком устройстве для парковки и доступа с полностью плавающими механическими манипуляторами нижняя рама снабжена двумя горизонтальными направляющими колесами под каждым ее торцом; и горизонтальный направляющий рельс, который контактирует с горизонтальными направляющими колесами, предусмотрен на конвейере и на поверхности автостоянки.
В упомянутом сверхтонком устройстве для парковки и доступа с полностью плавающими механическими манипуляторами расстояние между осями двух механических рычагов перед захватом составляет от 2200 мм до 3100 мм.
Устройство согласно изобретению работает следующим образом. Запускают приводной двигатель ходового механизма, чтобы позволить движущейся продольно каретке принять заданное положение под шасси автомобиля; затем приводят в действие передаточный механизм двух комплектов механических манипуляторов, чтобы привести скользящие панели механических манипуляторов в движение через соответствующие левовращающий и правовращающий шариковые винты. Скользящие панели в свою очередь приводят в движение четыре пары механических рычагов; и механические рычаги раскладываются из-за направляющего действия кривых на обоих концах направляющих канавок поворотных рычагов на промежуточных колесах в коленной части механических рычагов. Передаточный механизм затем постепенно складывает эти разложенные механические рычаги. Когда любая пара механических рычагов касается колес автомобиля, она временно прекращает двигаться из-за сопротивления, оказываемого колесами автомобиля. Поскольку в устройстве настоящего изобретения используется полностью плавающий механизм, другая пара механических рычагов и передаточный механизм приближаются к механическим рычагам, которые прекратили движение, пока обе пары механических рычагов не коснутся колес автомобиля, и колеса автомобиля поднимаются над землей из-за подъемного действия роликов на механических рычагах. В это время передаточный механизм останавливается вследствие действия предельного выключателя; а фиксирующие лапы под скользящими панелями фиксируют относительное положение механических манипуляторов и продольно движущейся каретки. После того как будут подняты все четыре колеса автомобиля, приводной двигатель ходового механизма включается в ответ на соответствующие программные команды, чтобы движущаяся продольно каретка переместилась из положения парковки к конвейеру, и действие получения доступа заканчивается. Поскольку механические манипуляторы являются полностью плавающими по отношению к продольно движущейся каретке, заявляемое устройство может автоматически распознавать и захватывать колеса автомобиля, если они расположены в пределах хода механических рычагов.
Сверхтонкое устройство для парковки и доступа согласно изобретению представляет собой специальный механизм парковки и доступа к автомобилям, который может быть размещен на конвейерной платформе, чтобы составлять подвижное механическое парковочное устройство наземного типа, или может быть расположен на штабелирующем устройстве, чтобы составлять многосекционное механическое парковочное устройство. Парковочное устройство согласно изобретению обходится без платформы для транспортировки автомобиля и без зубчатой рейки, чем снижается стоимость устройства и ускоряется парковка и доступ к автомобилям. С другой стороны, чистая высота 1,65 м между полом и потолком достаточна для гаража, таким образом также уменьшается стоимость строительных работ. Заявляемое устройство может применяться в больших механических гаражах из-за его конструктивной простоты и удобства технического обслуживания, и поэтому представляет собой экономичное, эффективное и удобное решение проблем с парковкой автомобилей в городах.
Краткое описание чертежей
Фиг.1 - вид спереди сверхтонкого устройства для парковки и доступа с полностью плавающими механическими манипуляторами согласно изобретению.
Фиг.2 - вид сверху сверхтонкого устройства для парковки и доступа с полностью плавающими механическими манипуляторами согласно изобретению.
Фиг.3 - вид сбоку сверхтонкого устройства для парковки и доступа с полностью плавающими механическими манипуляторами согласно изобретению.
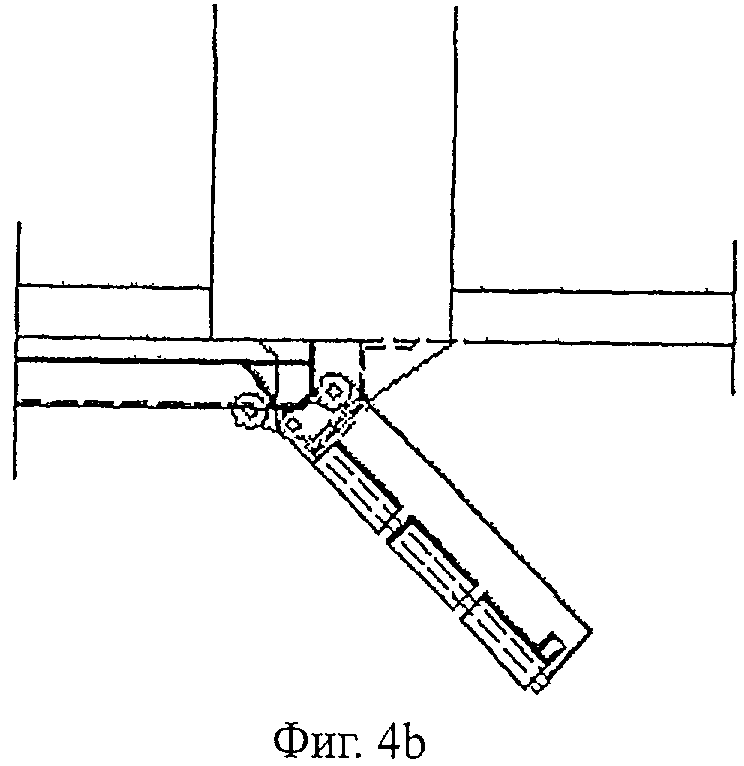
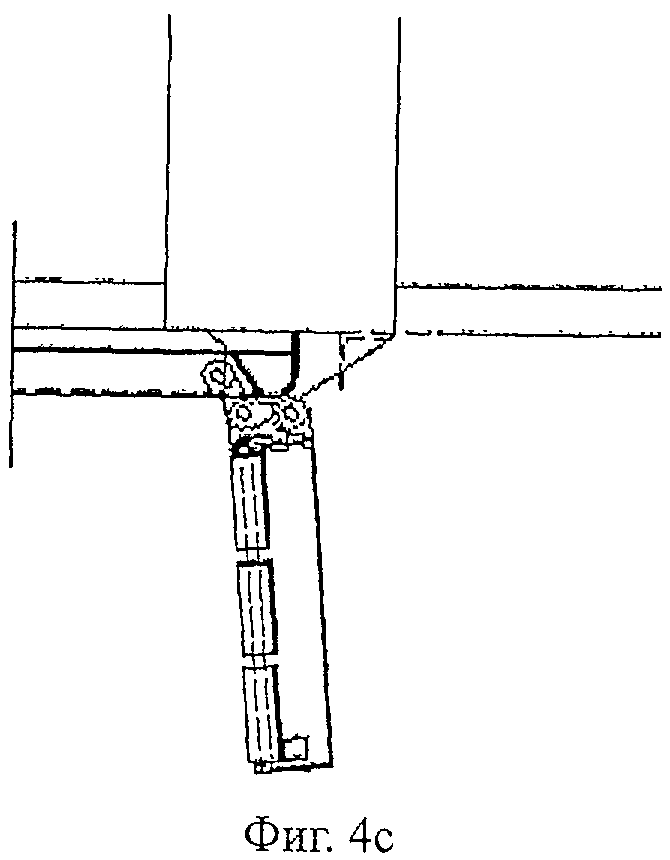
На Фиг.4a, 4b, 4c, 4d и 4e показан процесс раскладывания механического манипулятора, где на Фиг.4а показано состояние, в котором поворотный рычаг полностью сложен; на Фиг.4b показано состояние, в котором поворотный рычаг разложен на 45 градусов, пара промежуточных колес начинает входить в направляющую канавку и другая пара промежуточных колес движется по кривой направляющей канавки; на Фиг.4c показано состояние, в котором поворотный рычаг разложен на 85 градусов, пара промежуточных колес в большой степени вошла в направляющую канавку и другая пара промежуточных колес продолжает двигаться по кривой направляющей канавки; на Фиг.4d показано состояние, в котором поворотный рычаг полностью разложен, пара промежуточных колес вошла в направляющую канавку и другая пара промежуточных колес вышла из направляющей канавки; и на Фиг.4e показан вид спереди направляющей канавки поворотного рычага.
Фиг.5 - вид сверху, показывающий состояние, в котором колеса автомобиля подняты механическими манипуляторами.
Фиг.6 - вид спереди, показывающий состояние, в котором автомобиль поднят сверхтонким устройством для парковки и доступа согласно изобретению.
На Фиг.7a и 7b показано соотношение между механическим рычагом и группой опорных колес для механического рычага, где Фиг.7a - вид конструкции, показывающий состояние, в котором поворотный рычаг и опорные колеса не контактируют между собой; и Фиг.7b - вид конструкции, показывающий состояние, в котором поворотный рычаг и опорные колеса контактируют между собой и поворотный рычаг поднят.
Ссылочные номера
1 - продольно движущаяся каретка; 2 - полностью плавающий механический манипулятор; 3 - нижняя рама продольно движущейся каретки; 4 - направляющая канавка для поворотного рычага; 5 - прямолинейный рельс; 6 - приводной двигатель ходового механизма; 7 - приводной вал ведущего колеса; 8 - горизонтальное направляющее колесо; 9 - ведущее колесо; 10 - ведущее зубчатое колесо для ведущего колеса; 11 - группа опорных колес для поворотного рычага; 12 - механический рычаг; 13 - ролик; 14 - шарнирный палец в коленной части механического рычага; 15 - промежуточное колесо в коленной части механического рычага; 16 - правовращающий шариковый винт; 17 - запирающий и толкающий стержень для фиксирующих лап; 18 - передаточный механизм механического рычага; 19 - левовращающий шариковый винт; 20 - скользящая панель для толкания механического манипулятора; 21 - фиксирующая лапа; 22 - приводное колесо; 23 - горизонтальный направляющий рельс; 24 - пальцевый вал, соединяющий скользящую панель и механический рычаг.
Описание вариантов осуществления
Ниже настоящее изобретение описано подробно со ссылками на чертежи.
Как показано на Фиг.1-7, сверхтонкое устройство для парковки и доступа с полностью плавающими механическими манипуляторами согласно изобретению включает продольно движущуюся каретку 1 и два независимых комплекта полностью плавающих механических манипуляторов 2, расположенных симметрично на левой и правой сторонах каретки 1.
Продольно движущаяся каретка 1 содержит нижнюю раму 3, приводной двигатель 6 для ходового механизма, ведущее колесо 9, приводной вал 7 для ведущего колеса, ведущее зубчатое колесо 10 для ведущего колеса, приводное колесо 22 и горизонтальное направляющее колесо 8. Нижняя рама 3 является прямоугольной и состоит из двух длинных продольных балок и двух коротких поперечных балок. Каждая продольная балка имеет прямолинейные рельсы 5, направляющие канавки 4 для поворотного рычага на ее внутренней стороне и внешней стороне, соответственно. Устройство для парковки и доступа согласно изобретению симметрично по отношению к соединительной линии, проходящей через средние точки продольных балок. Так, ниже будет описана только конструкция на одной стороне.
Приводной двигатель 6 расположен на одной стороне нижней рамы 3, и корпус двигателя 6 прикреплен к внутренней стороне продольной балки. Приводной вал 7 подсоединен с возможностью вращения между двумя продольными балками нижней рамы 3, и приводится в движение ведущими зубчатыми колесами рядом с обоими концами. Ось ведущего зубчатого колеса 10 зафиксирована относительно оси ведущего колеса 9 так, что ведущее зубчатое колесо 10 и ведущее колесо 9 вращаются синхронно. Приводной двигатель 6 вращает четыре ведущих колеса 9 через приводной вал 7. Нижняя рама 3 снабжена четырьмя приводными колесами 22 в середине продольных балок, чтобы облегчить продольно движущейся каретке 1 пересечение зазора между конвейером и поверхностью автостоянки, таким образом не требуется специальных средств для компенсации зазора. Этим упрощается конструкция и сокращается время на парковку и доступ к автомобилю. В то же время изгибающий момент, действующий на нижнюю раму 3, намного уменьшается, так что нижняя рама 3 может быть выполнена из стального профиля с небольшой площадью поперечного сечения, чем создается сверхтонкое устройство.
Четыре горизонтальных направляющих колеса 8 установлены под нижней рамой 3 в ее углах. Как показано на Фиг.3, горизонтальный направляющий рельс 23, который контактирует с горизонтальными направляющими колесами 8, установлен на конвейере и на поверхности автостоянки. Таким образом, направление хода продольно движущейся каретки 1 не имеет отклонений, и автомобиль может транспортироваться плавно.
Полностью плавающий механический манипулятор 2 имеет передаточный механизм 18 механического рычага, скользящую панель 20 для толкания механического манипулятора, механический рычаг 12, ролики 13 на механическом рычаге, шарнирный палец 14 в коленной части механического рычага, промежуточные колеса 15 в коленной части механического рычага, группы опорных колес 11 поворотного рычага на наружных сторонах продольных балок нижней рамы каретки, направляющую канавку 4 для поворотного рычага на наружной стороне продольной балки нижней рамы каретки, прямолинейный направляющий рельс 5 на внутренней стороне продольной балки нижней рамы каретки, фиксирующие лапы 21 под скользящей панелью и запирающие и толкающие стержни 17 для фиксирующих лап. На левой или правой части нижней рамы предусмотрены четыре механических рычага 12, два из которых на одной стороне симметричны двум другим на другой стороне по отношению к линии, проходящей через средние точки коротких балок. Два противоположных механических рычага 12 имеют между ними скользящую панель 20. Эти два механических рычага 12 подсоединены к обоим концам скользящей панели 20 через пальцевые валы 24. Две симметричные скользящие панели 20, расположенные на левой или правой части, скользяще контактируют с нижней рамой 3 через прямолинейные направляющие рельсы 5. Передаточный механизм 18 механических рычагов, который расположен между двумя скользящими панелями 20, скользяще контактирует с нижней рамой 3 через прямолинейные направляющие рельсы 5. Оба конца выходного вала передаточного механизма 18 прикреплены к правовращающему шариковому винту 16 и к левовращающему винту 19 соответственно. Правовращающий шариковый винт 16 и левовращающий шариковый винт 19 соединены резьбовым соединением со скользящей панелью 20. Таким образом передаточный механизм 18 сообщает скользящей панели 20 поступательное движение через левовращающий шариковый винт 19 и правовращающий шариковый винт 16.
Каждый механический рычаг 12 снабжен по меньшей мере тремя роликами 13, которые вращаются свободно. После раскладывания механических рычагов 12 и захвата колес автомобиля ролики, способные к свободному вращению, могут поднять колеса автомобиля над землей. Каждый механический рычаг 12 снабжен на внутреннем конце двумя парами промежуточных колес 15 в его коленной части. Когда две скользящие панели 20 движутся в направлении друг друга, они приводят в движение механические рычаги 20, а промежуточные колеса 15 направляются по кривым на обоих концах направляющих канавок 4 поворотных рычагов, и механические рычаги 12 раскладываются, как показано на Фиг.4. Когда две скользящие панели 20 движутся друг от друга, механические рычаги 12 складываются и промежуточные колеса 15 направляются по кривым на обоих концах направляющих канавок 4 поворотных рычагов.
Когда скользящие панели 20 для толкания механического манипулятора приводят в движение четыре механических рычага 12, последние раскладываются по направлению кривых на обоих концах направляющих канавок 4 для поворотных рычагов к промежуточным колесам 15. После раскладывания механические рычаги 12 движутся в направлении друг друга под действием передаточного механизма. Когда любая пара механических рычагов входит в контакт с колесами автомобиля, она временно прекращает движение из-за сопротивления колес автомобиля. Поскольку устройство согласно настоящему изобретению является полностью плавающим механизмом, другая пара механических рычагов и передаточный механизм закрываются по отношению механических рычагов, которые прекратили движение, до тех пор пока обе пары механических рычагов не коснутся колес автомобиля и последние не будут подняты над землей действием роликов 13 на механических рычагах 12. Поскольку механические рычаги являются полностью плавающими по отношению к продольно движущейся каретке, заявляемое устройство может автоматически распознавать и захватывать колеса автомобиля, если последние расположены в пределах хода разложенных механических рычагов. Автомобили с колесной базой от 2200 мм до 3100 мм и с дорожным просветом больше 100 мм могут быть захвачены заявляемым устройством.
Передаточный механизм 18 для механических рычагов, кроме того, снабжен по меньшей мере четырьмя запирающими и толкающими стержнями 17 для фиксирующих лап. Каждая скользящая панель 20 имеет под ней две симметричные фиксирующие лапы. Когда механические рычаги 12 захватывают колеса автомобиля, эти запирающие и толкающие стержни 17 толкают фиксирующие лапы 21 до упора к двум продольным балкам нижней рамы 3, достигая надежного состояния запирания в двух направлениях. В это время механические манипуляторы переходят из плавающего состояния относительно нижней рамы в запирающее состояние, так что продольно движущаяся каретка и автомобиль входят в неподвижное зацепление друг с другом и могут двигаться вместе. Благодаря этому можно осуществлять стабильную и надежную транспортировку.
Механические рычаги 12, кроме того, снабжены в их коленной части шарнирными пальцами 14, на которых наружные концы механических рычагов 12 могут поворачиваться вверх. Так, при складывании механических рычагов их наружные концы могут быть подняты вверх из-за групп 11 опорных колес поворотных рычагов, предусмотренных на наружных сторонах продольных балок нижней рамы, как показано на Фиг.7. Таким образом наружные концы механических рычагов поднимаются от земли, чтобы избежать трения.
Хотя описание относится к лучшему варианту осуществления сверхтонкого устройства для парковки и доступа с полностью плавающими механическими манипуляторами согласно изобретению, оно не может считаться ограничивающим настоящее изобретение. Специалистам в данной области будет очевидно, что в настоящее изобретение могут быть внесены различные эквивалентные признаки, изменения и модификации, не изменяющие его сути.
Реферат
Изобретение относится к трехмерному устройству для парковки транспортного средства, в частности к сверхтонкому устройству для парковки и доступа к транспортному средству с полностью плавающими механическими манипуляторами. Сверхтонкое устройство для парковки и доступа с полностью плавающими механическими манипуляторами содержит продольно движущуюся каретку, снабженную на каждой своей стороне симметричными полностью плавающими механическими манипуляторами. Продольно движущаяся каретка состоит из нижней рамы, приводного двигателя для ходового механизма, ведущего колеса, которое поддерживает нижнюю раму, приводного вала для ведущего колеса и ведущего зубчатого колеса для ведущего колеса, причем упомянутая нижняя рама на каждой ее стороне снабжена упомянутыми приводными двигателями и упомянутые приводные двигатели приводят упомянутые ведущие колеса в вращение через упомянутый приводной вал и упомянутое ведущее зубчатое колесо. Полностью плавающий механический манипулятор состоит из механического рычага, передаточного механизма механического рычага, скользящей панели для толкания механических манипуляторов, прямолинейного направляющего рельса на внутренней стороне продольной балки упомянутой нижней рамы и направляющей канавки для поворотного рычага на наружной стороне продольной балки упомянутой нижней рамы. Четыре симметрично расположенных механических рычага и две скользящие панели предусмотрены на каждой стороне линии, проходящей через средние точки продольных балок упомянутой нижней рамы, причем каждая из упомянутых скользящих панелей соединена на каждой ее стороне с механичес�
Формула
упомянутая продольно движущаяся каретка на каждой ее стороне снабжена симметричными полностью плавающими механическими манипуляторами;
упомянутая продольно движущаяся каретка состоит из нижней рамы, приводного двигателя для ходового механизма, ведущего колеса, которое поддерживает нижнюю раму, приводного вала для ведущего колеса и ведущего зубчатого колеса для ведущего колеса, причем упомянутая нижняя рама на каждой ее стороне снабжена упомянутыми приводными двигателями, и упомянутые приводные двигатели приводят упомянутые ведущие колеса в вращение через упомянутый приводной вал и упомянутое ведущее зубчатое колесо;
упомянутый полностью плавающий механический манипулятор состоит из механического рычага, передаточного механизма механического рычага, скользящей панели для толкания механических манипуляторов, прямолинейного направляющего рельса на внутренней стороне продольной балки упомянутой нижней рамы и направляющей канавки для поворотного рычага на наружной стороне продольной балки упомянутой нижней рамы;
четыре симметрично расположенных механических рычага и две скользящих панели предусмотрены на каждой стороне линии, проходящей через средние точки продольных балок упомянутой нижней рамы, причем каждая из упомянутых скользящих панелей соединена на каждой ее стороне с механическим рычагом через пальцевый вал;
упомянутые две скользящие панели на одной стороне находятся в скользящем зацеплении с упомянутой нижней рамой через прямолинейный направляющий рельс; эти две скользящие панели имеют между ними передаточный механизм для механического рычага;
упомянутый передаточный механизм для механического рычага, который скользяще контактирует с упомянутой нижней рамой через упомянутый прямолинейный направляющий рельс, сообщает поступательное движение двум скользящим панелям на одной стороне через левовращающий шариковый винт и правовращающий шариковый винт соответственно;
каждый механический рычаг снабжен по меньшей мере тремя роликами, которые вращаются свободно; упомянутые ролики поднимают колеса автомобиля над землей, когда механические рычаги захватывают и зажимают колеса автомобиля;
каждый механический рычаг снабжен промежуточными колесами в коленной части на его внутреннем конце; упомянутые промежуточные колеса движутся по кривым направляющих канавок для поворотных рычагов, и упомянутые скользящие панели приводят в движение упомянутые механические рычаги.
упомянутый передаточный механизм снабжен по меньшей мере четырьмя запирающими и толкающими стержнями для фиксирующих лап; каждая скользящая панель имеет под ней две симметричные фиксирующие лапы;
и в случае, когда механические рычаги захватывают колеса автомобиля, запирающие и толкающие рычаги толкают фиксирующие лапы до упора к двум продольным балкам упомянутой нижней рамы, достигая надежного состояния запирания в двух направлениях.
упомянутый механический рычаг снабжен шарнирным пальцем в его коленной части; упомянутая продольная балка упомянутой нижней части снабжена на ее наружной стороне группами опорных колес для поворотных рычагов; и наружный конец упомянутого механического рычага способен подниматься на шарнирном пальце под действием упомянутых групп опорных колес поворотных рычагов.
плавающими механическими манипуляторами по п.1, отличающееся тем, что
две продольные балки упомянутой нижней рамы в их средней части снабжены четырьмя приводными колесами.
упомянутая нижняя рама под каждым ее концом снабжена двумя горизонтальными направляющими колесами; и горизонтальный направляющий рельс, который контактирует с горизонтальными направляющими колесами, предусмотрен на конвейере и на земле автостоянки.
расстояние между осями двух соответствующих механических рычагов перед захватом составляет от 2200 мм до 3100 мм.
Документы, цитированные в отчёте о поиске
Самодвижущаяся тележка на колесах и способ управления тележкой
Патенты аналоги
Самодвижущаяся тележка на колесах и способ управления тележкой
Комментарии