Механическая автопарковочная система - RU170987U1
Код документа: RU170987U1
Чертежи

Описание
Полезная модель относится к области машиностроения, в частности к механическим автопарковочным системам.
Известна полуавтоматическая парковочная система «ROTARY PARCING» в виде цепного вертикального люлечного элеватора, позволяющая разместить от 5 до 12 автомобилей, обеспечивающая очередный доступ к любому машиноместу, недостатком которой является предоставление автомобилей по очередности, требующая соблюдения схемы их равновесного расположения, что снижает надежность и безопасность системы (см. Парковочные системы: интернет-ссылка - http://www.cipark.ru/parkings).
Наиболее близкой по сути является зависимая механизированная парковка «CITY», содержащая раму-стойку, жестко закрепленную на бетонном основании и организующую с ним первый уровень стояночных мест, соединенную шарнирно с подъемной платформой второго уровня стояночных мест, путевые выключатели и пульт управления гидравлическим приводом подъемной платформы, через поворотные шарнирные стойки опускающим подъемную платформу вперед на первый уровень стояночных мест.
Недостаток - малое число стояночных мест, зависимость в постановке-снятии верхнего автомобиля от занятости первого уровня стояночных мест и низкая надежность из-за возможности самопроизвольного опускания верхней платформы на нижний автомобиль в случае нарушения работы привода (см. Парковочные системы: интернет-ссылка - http://www.cipark.ru/parkings).
Технический результат - повышение надежности и функциональности устройства и снижение риска повреждения автомобилей при парковочных операциях за счет усовершенствования конструкции устройства.
Он достигается тем, что известное устройство, содержащее раму-стойку, жестко закрепленную на бетонном основании и организующую с ним первый уровень стояночных мест, соединенную шарнирно с подъемной платформой второго уровня стояночных мест, путевые выключатели и пульт управления приводом платформы, через поворотные шарнирные стойки, опускающим платформу вперед на первый уровень стояночных мест, дополнительно имеет подъемную платформу третьего уровня стояночных мест, обе подъемные платформы имеют парные тросовые полиспасты и парные механические приводы с валами-синхронизаторами, установленными между приводами, через поворотные шарнирные стойки, опускающими каждую подъемную платформу сбоку от первого уровня стояночных мест, рама-стойка имеет отбойные пружины и защелки-фиксаторы с электротолкателями, осуществляющими пусковой толчок или фиксацию платформ, подвижные платформы имеют ручные червячные приводы, связанные с механическими приводами через электромагнитные муфты, поднимающие и опускающие платформы в аварийном режиме.
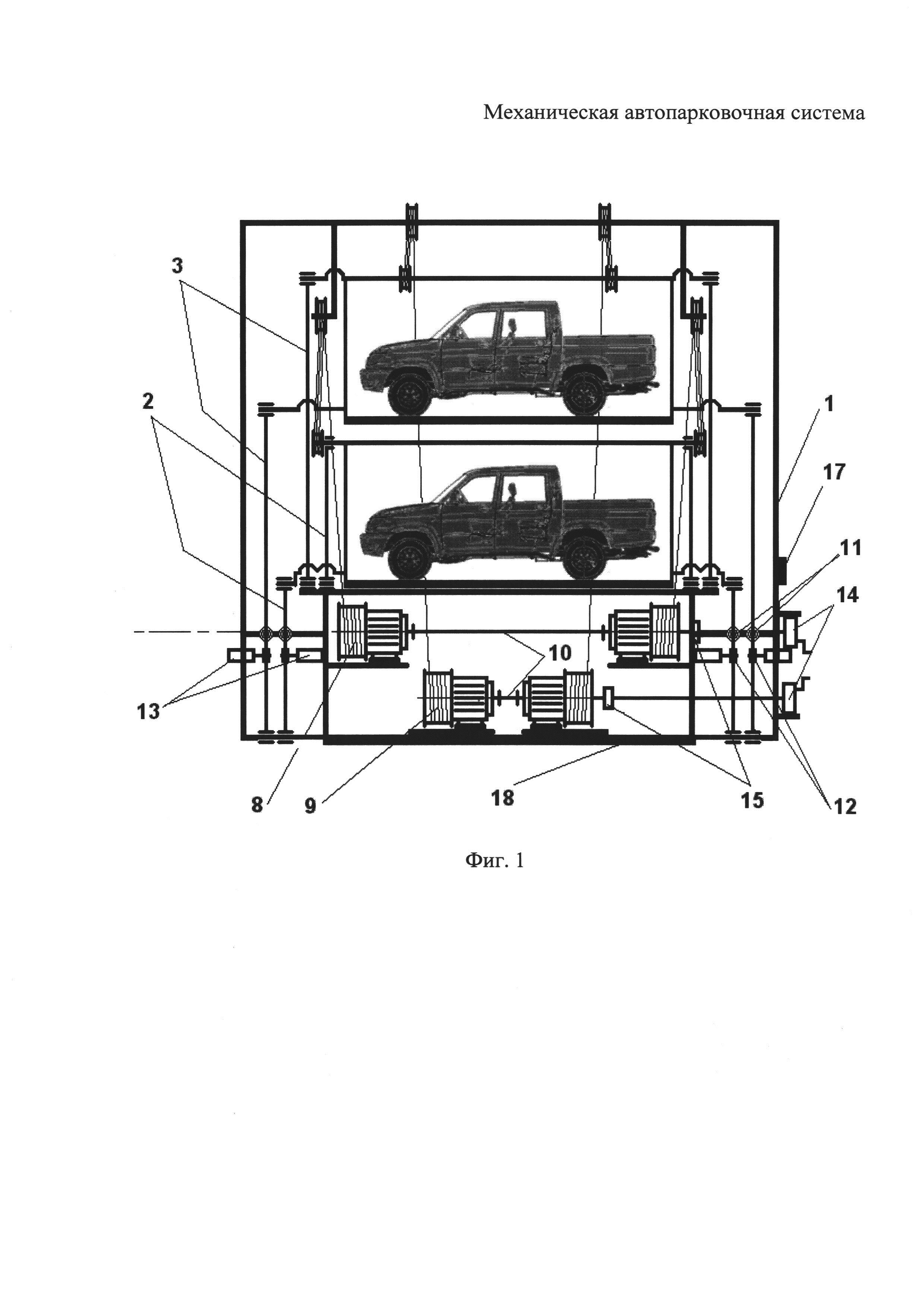
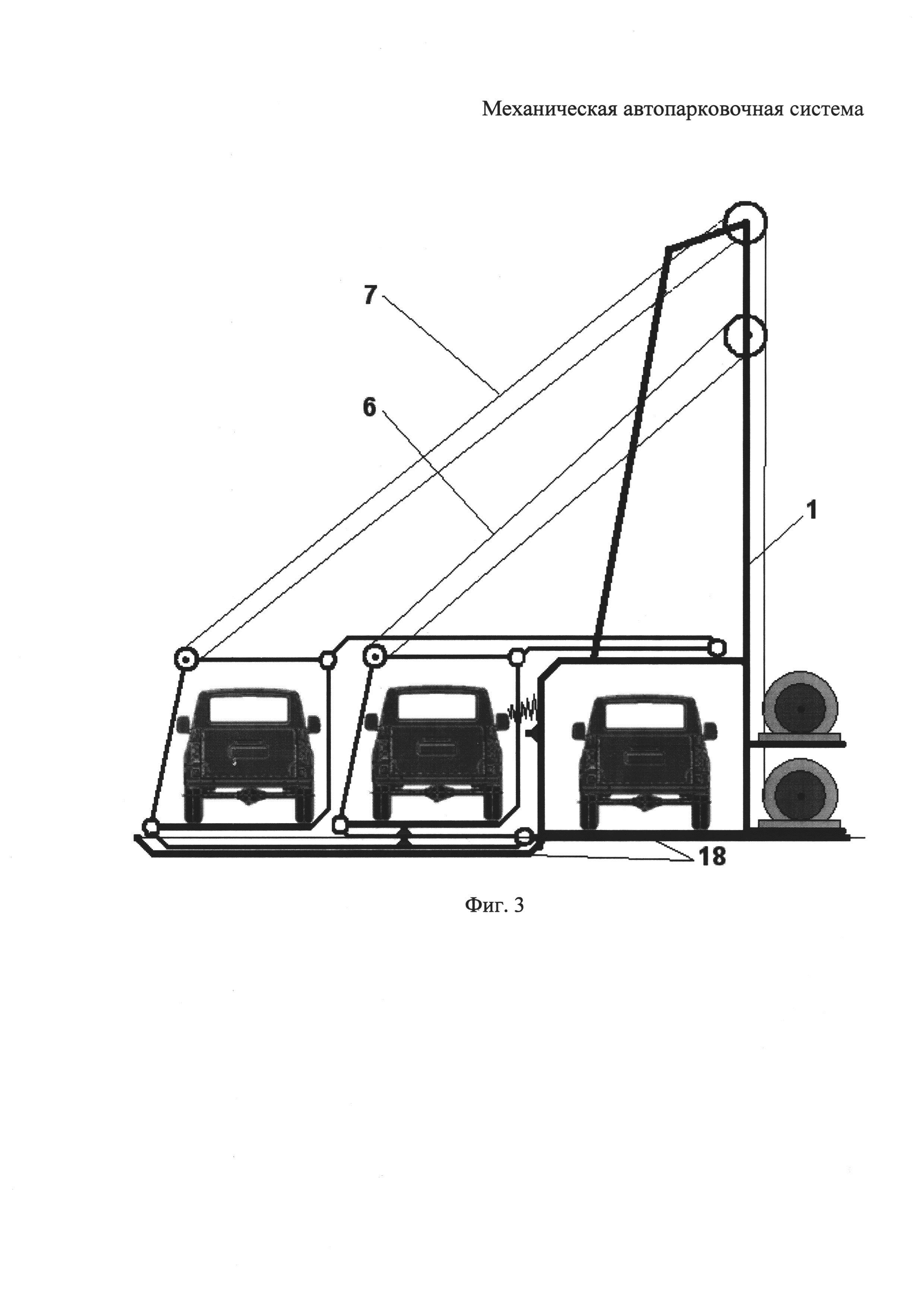
Предлагаемое устройство изображено на чертежах: фиг. 1 - вид спереди, фиг. 2 - вид сбоку в поднятом состоянии платформ, фиг. 3 - вид сбоку в опущенном состоянии платформ. Устройство содержит раму-стойку 1, жестко закрепленную на бетонном основании 18, соединенную шарнирно с поворотными шарнирными стойками 2 и 3, которые соединены шарнирно с подъемными платформами 4 второго уровня и 5 третьего уровня стояночных мест, имеющими парные тросовые полиспасты 6 платформы второго уровня и 7 платформы третьего уровня, которые связаны с механическим приводом 8 подъема платформы второго уровня и с механическим приводом 9 подъема платформы третьего уровня, валы-синхронизаторы 10 установлены в каждом приводе, отбойные пружины 11 и защелки-фиксаторы 12 верхнего положения поворотных шарнирных стоек, электротолкатели 13 защелок-фиксаторов и ручные червячные приводы 14 закреплены на раме-стойке, электромагнитные муфты 15 установлены между ручными червячными приводами и механическими приводами, путевые выключатели 16 и пульт управления приводами 17 закреплены на раме-стойке.
Устройство работает следующим образом: на первый уровень стояночных мест - бетонное основание 18 - автомобиль заезжает независимо и без подъема. Для парковки на верхних уровнях нажатием кнопки «Опускание» на пульте управления 17 включаются электротолкатели 13 защелок-фиксаторов 12 и механические приводы 8 или 9 платформ 4 или 5 одного или одновременно двух уровней, при этом защелки-фиксаторы 12 разблокируют поворотные шарнирные стойки платформ, а отбойные пружины 11 выталкивают платформы из верхнего положения. Парные тросовые полиспасты 6 или 7 опускают платформы 4 или 5 независимо с каждого уровня до касания платформами бетонного основания 18, при этом, через поворотные шарнирные стойки 2 или 3, каждая подъемная платформа 4 или 5 опускается сбоку от первого уровня стояночных мест. Заезд автомобиля на платформы 4 или 5 выполняется независимо через торец при их расположении на бетонном основании 18, с последующим нажатием на пульте 17 кнопки «Подъем», после которого включаются механические приводы 8 или 9 парных полиспастов 6 или 7 платформ 4 или 5 с последующим их подъемом до верхнего положения на угол не больше 120° и не меньше 100° для обеспечения верхнего устойчивого равновесия, и при этом поворотные шарнирные стойки 2 или 3 платформ 4 или 5 поджимаются к отбойным пружинам 11 на раме-стойке, а защелки-фиксаторы 12 запирают поворотные шарнирные стойки 2 или 3, после чего срабатывает путевой выключатель 16 для остановки механических приводов 8 или 9.
В случае отказа механических приводов платформ наступает аварийный режим. Для этого режима на раме-стойке на первом уровне стояночных мест установлены ручные червячные приводы 14, которые через электромагнитные муфты 15 нормально замкнуты с механическими приводами платформ.
При пуске механических приводов электромагнитные муфты отключают ручной привод, а при работе в аварийном режиме при вращении ручного привода происходит опускание платформы с автомобилем или подъем пустой платформы. Однако постановка автомобиля на стояночное место в ручном режиме не предусмотрена. Ручной червячный привод является дополнительным предохранительным механизмом от самопроизвольного опускания платформы при отключенном механическом приводе.
Предлагаемое устройство имеет повышенную функциональность за счет независимости подъемных операций и большего числа стояночных мест, большую надежность за счет функции дублирования в подъемных механизмах и механической синхронизации приводов, малый риск самопроизвольного опускания платформ за счет применения устойчивого равновесия в стояночном положении, в котором нагрузка не передается на приводы, а сами платформы жестко фиксируются защелками.
Источники информации, принятые во внимание
1. Парковочные системы: интернет-ссылка - http://www.cipark.ru/parkings.
2. Парковочные системы: интернет-ссылка - http://www.cipark.ru/parkings (прототип).
Реферат
Полезная модель относится к области машиностроения, в частности к механическим автопарковочным системам.Технический результат - повышение надежности и функциональности устройства и снижение риска повреждения автомобилей при парковочных операциях за счет усовершенствования конструкции устройства.Он достигается тем, что известное устройство, содержащее раму-стойку, жестко закрепленную на бетонном основании и организующую с ним первый уровень стояночных мест, соединенную шарнирно с подъемной платформой второго уровня стояночных мест, путевые выключатели и пульт управления приводом подъема платформы, через поворотные шарнирные стойки, опускающим платформу вперед на первый уровень стояночных мест, дополнительно имеет подъемную платформу третьего уровня стояночных мест, обе подъемные платформы имеют парные тросовые полиспасты и парные механические приводы с валами-синхронизаторами, установленными между приводами, через поворотные шарнирные стойки, опускающие каждую подъемную платформу сбоку от первого уровня стояночных мест, рама-стойка имеет отбойные пружины и защелки-фиксаторы с электротолкателями, осуществляющими пусковой толчок или фиксацию платформ, подвижные платформы имеют ручные червячные приводы, связанные с механическими приводами через электромагнитные муфты, поднимающие и опускающие платформы в аварийном режиме.
Комментарии