Устройство для создания движения в жидкости, в особенности на ее поверхности - RU2109262C1
Код документа: RU2109262C1
Чертежи








Описание
Настоящее изобретение касается создания устройства, предназначенного для приведения в движение жидкость, в особенности на ее поверхности, указанная жидкость содержится в водоеме, ограниченном одной или несколькими стенками, в частности в бассейне. Это устройство содержит элемент контактирования с жидкостью, в которой, в особенности на поверхности которой, должно быть создано движение.
Устройство содержит плавающий или затопленный агрегат, не связанный со стенкой водоема, содержащий два тела, связанных между собой по меньшей мере одним средством, предназначенным для осуществления перемещения одного тела относительно другого таким образом, чтобы создавать движение в жидкости, в особенности на ее поверхности.
Другим предметом изобретения является создание агрегата, излучающего сигнал в тот момент, когда тело, в особенности плавающее тело, должно погружаться в жидкость, в которой или на поверхности которой должно быть создано движение, таким образом, что задержка между моментом, в который волна или движение проходят точно определенное состояние, и моментом погружения соответствует заданной величине. Этот агрегат содержит преимущественно датчик ускорения, связанный с микропроцессором.
Из документа EP-A-0-236 653 известна система генерирования искусственной зыби в водоеме. Эта система содержит толкатель, соединенный с одной из стенок водоема, на валу поршня которого установлен буй. Толкатель навязывает чередующееся движение в горизонтальной поверхности буя.
Для использования такого устройства в бассейне следует провести значительные подготовительные работы вдоль одной из его стенок.
С другой
стороны, использование системы такого типа для бассейна имело бы незначительную эффективность. Действительно, при возврате волны (возникающем из-за отражения волны от стенки) могут возникать различные
возможности, среди которых:
- буй при возврате волны воздействует в направлении к ней таким образом, что движение буя противоположно возвратному движению волны, то есть энергия буя
используется для создания препятствий возвратному движению волны,
- буй действует в углублениях волны, при этом передаваемая буем жидкости мощность для приведения ее в движении мала, так как
буй перемещается все время в одной и той же горизонтальной плоскости.
Наконец, так как буй остается в одной и той же горизонтальной плоскости, такой буй выполняет функцию барьера или поглотителя энергии отраженной волны.
Известно также устройство, предназначенное для использования в бассейне, образованное вертикальной панелью, связанной со стенкой бассейна, с одной стороны, при помощи шарнирного соединения и, с другой стороны, при помощи толкателя. Это известное устройство позволяет создавать волны на поверхности бассейна, но для его установки требуются значительные подготовительные работы. Кроме того, передаваемая жидкости энергия будет зависеть от уровня контактирующей с панелью волны. Это устройство поглощает значительную энергию для создания волн.
Наконец, из документа US-A-3477233 известна машина для создания движения на поверхности жидкости, содержащая кожух, образующий буй, и груз, на котором установлен мотор-редуктор, вал которого несет кривошип. Рычаг соединяет этот кривошип с цапфой, установленной на кожухе в верхней части буя. Вес по меньшей мере частично удерживается пружинами.
Буй или кожух этой машины закреплен на двух плавающих телах при помощи гибких средств, что позволяет избегать значительных движений буя по поверхности жидкости, позволяя ему одновременно колебаться в вертикальной плоскости.
Эта машина не может быть использована эффективным образом для создания волн, так как она не снабжена системой контроля перемещения буя относительно веса. Действительно, в качестве примера, если положение веса относительно буя не сдвинуто по фазе вперед на 90o, то создаваемое машиной движение будет случайным и может, например, создавать волны и противоволны.
Известно устройство для генерирования волн в жидкости, содержащее плавучее тело, приводимое в движение с помощью привода, управляемого блоком управления, в частности с использованием сигнала с датчика оценки амплитуды волны (EP Al N 0164811, кл. G 01 M, 10/00, 1985).
Однако указанное устройство не обеспечивает необходимую синхронизацию привода и генерируемых волн.
Настоящее изобретение предусматривает устранение этих недостатков и имеет среди других в качестве предмета изобретения устройство, которое потребляет незначительную энергию для создания волн, например, в бассейне, в результате того, что изобретение позволяет лучше использовать энергию для создания движения на поверхности бассейна.
В самом деле, в случае бассейна, устройство не объединено со стенкой бассейна и не является статическим препятствием для создаваемых движений. Однако оно может становиться динамическим препятствием в частном виде реализации изобретения, в котором движение перемещения тел устройства автоматически управляется в передней квадратуре относительно движения волн. Наконец, функционирование устройства может автоматически управляться с целью получения максимальной эффективности. Таким образом, если хотят получить движения максимальной амплитуды, производят автоматическое управление устройством в соответствии с изобретением по квадратуре относительно движения создаваемых волн.
Устройство предназначено для создания движения в жидкости, в особенности на ее поверхности. Указанная жидкость содержится в водоеме, ограниченном одной или несколькими стенками, в частности в бассейне. Оно содержит элемент контактирования с жидкостью, в которой или на поверхности которой должно быть создано движение. Этим элементом является плавучий или затопленный агрегат, не объединенный со стенкой водоема. Агрегат содержит два тела, связанные между собой по меньшей мере при помощи средства, предназначенного для перемещения тел друг относительно друга таким образом, чтобы создавать движение в жидкость, в частности на ее поверхности.
Под агрегатом, не связанным со стенкой водоема, понимают два тела, связанные между собой при помощи одного средства и образующие плавучий агрегат или затопленный агрегат, свободный от всякого движения в жидкости или на ее поверхности, но также агрегат, образованный двумя телами, связанными друг с другом при помощи одного средства, являющийся плавучим или погруженным, движение которого в жидкости или на ее поверхности ограничивается таким образом, чтобы обеспечить определенное позиционирование тела, являющегося плавучим или погруженным в жидкость или располагающегося на поверхности жидкости (установку соответствующего изобретению устройства на якорь, например, при помощи каната для обеспечения расположения (позиционирования) устройства в определенном объеме жидкости или в определенной зоне на поверхности указанной жидкости).
Преимущественно первым телом является кожух, в котором размещается второе тело.
Устройство содержит также средство, предназначенное для компенсации по меньшей мере частично эффекта тяжести второго тела на первое тело. Это средство образовано, например, упругим элементом, расположенным между основанием первого тела и стороной второго тела. Предпочтительно таким средством является пружина, один из концов которой упирается в основание первого тела, в то время как одна из сторон второго тела, параллельная указанному основанию, упирается во второй конец пружины.
Устройство включает в себя систему контроля перемещения тел друг относительно друга. Такая система может содержать по меньшей мере один датчик из семейства датчиков, предназначенных для оценки амплитуды волн, такой как датчик эхо-сигнала глубины, датчики, предназначенные для оценки перемещения тел друг относительно друга, датчики, предназначенные для оценки погружения первого тела, измерители ускорения и т.п.
В одном из вариантов осуществления изобретения первым телом является бак, дно которого связано с вторым телом при помощи толкателя, причем перемещение стержня последнего вызывает перемещение тел друг относительно друга.
В другом варианте осуществления изобретения устройство содержит средство, образованное мотором-редуктором, установленным на первом теле, который приводит во вращение вал, несущий кривошип, причем шатун располагается между указанным кривошипом и вторым телом. В этом виде осуществления изобретения мотором-редуктором является мотор-редуктор с переменной (регулируемой) скоростью.
Устройство содержит систему контроля, имеющую блок автоматического регулирования скорости перемещения тел друг относительно друга и устройство автоматического регулирования фазы перемещения тел друг относительно друга и относительно фазы движения, создаваемого в жидкости или на ее поверхности.
В случае устройства, содержащего средство, образованное мотором-редуктором, приводящим во вращение вал, несущий кривошип, связанный с шатуном, один из концов которого соединен с одним из тел, мотор-редуткор снабжен первым датчиком, вырабатывающим частоту, пропорциональную скорости приводного мотора редуктора, и вторым датчиком - датчиком синхронизации, излучающим сигнал при нахождении кривошипно-шатунного механизма в крайнем положении. Блоки автоматического регулирования скорости и фазы связаны с датчиком, вырабатывающим частоту, пропорциональную скорости мотора-редуктора, и с вторым датчиком синхронизации, излучающим сигнал при достижении кривошипно-шатунным механизмом крайнего положения, и датчиком ускорения.
Датчиком скорости мотора-редуктора или, более точно, мотора, приводящего в движение редуктор, и датчиком синхронизации может быть фотоэлемент, содержащий между излучателем и приемником излучения часть перемещающегося диска, соединенного с осью приводного двигателя редуктора или с осью редуктора. Указанный диск имеет один или несколько пазов или перфораций, позволяющих приемнику получать сигнал, излучаемый передатчиком.
В предпочтительном варианте реализации изобретения система контроля содержит микропроцессор, получающий по кабелям сигналы датчиков скорости мотора-редуктора, датчика синхронизации и датчика ускорения и вырабатывающий сигнал управления питанием мотора-редуктора с регулируемой скоростью.
Микропроцессор управляет питанием мотора-редуктора
таким образом, чтобы осуществлять регулирование его скорости. В одной из форм осуществления изобретения указанный микропроцессор содержит:
- элемент памяти для величины опорной скорости
мотора-редуктора для каждого оборота,
- элемент памяти для желаемого периода мотора-редуктора (инверсного частоте вращения мотора-редуктора),
- блок определения среднего периода
мотора-редуктора на несколько его оборотов,
- блок определения отклонения между средним периодом и желаемым периодом,
- блок изменения памяти опорной скорости мотора-редуктора в
функции измеренного отклонения таким образом, чтобы позволить производить регулирование скорости мотора-редуктора.
Микропроцессор также содержит:
- блок обработки сигналов с
датчика ускорения, в котором определяются средняя за период времени величина и максимальное и минимальное значения этих сигналов и в котором при помощи этих величин определяется момент, когда волна
движения в жидкости или на ее поверхности проходит определенное состояние,
- блок измерения удаления между указанным моментом и моментом прохождения крайнего состояния системой кривошип-шатун,
- в случае необходимости элемент обработки удалений с целью определения среднего за несколько периодов удаления,
- систему сравнения этих удалений или среднего удаления с
оптимальным удалением, излучающую сигнал питания мотора - редуктора таким образом, чтобы скорректировать существующее различие между удалением или средним удалением и оптимальным удалением, то есть
момент прохода крайнего состояния кривошипно-шатунным механизмом относительно момента, когда волна на поверхности жидкости или движение в жидкости проходит указанное предварительно определенное
состояние (например, в случае бассейна, нулевое состояние, то есть состояние, при котором волна достигает среднего уровня жидкости).
Наконец, предметом настоящего изобретения является агрегат, позволяющий определять момент, когда тело должно претерпевать погружение в жидкость, в котором или на поверхности которого должно быть создано движение, таким образом, чтобы получать предварительно определенное движение в водоеме или бассейне, в особенности на поверхности последнего.
Такой агрегат может быть использован в соответствующем изобретению устройстве, но также может быть использован для передачи сигнала, такого как звуковой сигнал, указывающего, например, плавцу, что он должен погружать плавучее тело для получения предварительно определенного движения, например, волн максимальной амплитуды в бассейне.
Этот агрегат содержит датчик ускорения, соединенный с микрокомпьютером.
Указанный микропроцессор преимущественно
содержит:
- блок обработки сигналов, поступающих от датчика ускорения, в котором определяется средняя величина за определенный период времени и максимальная и минимальная величины указанных
сигналов и в котором при помощи этих величин определяется момент, когда волна на поверхности жидкости или движение в ней проходят предварительно определенное состояние,
- блок, позволяющий
выводить из этих величин резонансные периоды волн или движений в содержащийся в бассейне жидкости,
- систему излучения сигнала для погружения тела с целью получения волн или движения, имеющих
период, близкий к периоду резонанса.
Другие особенности и детали изобретения будут видны из следующего детального его описания, в котором сделаны ссылки на приложенные чертежи.
На фиг. 1 - 4 показаны различные виды осуществления изобретения.
На фиг. 5 показан частичный разрез по линии V-V устройства, изображенного на фиг. 3.
На фиг. 6 изображен другой вид реализации устройства, соответствующего изобретению, снабженного электронным устройством.
На фиг. 7 показан последний вид осуществления устройства, соответствующего изобретению.
На фиг. 8 показана схематично система контроля перемещения тел друг относительно друга.
На фиг. 9 и 10 показаны взаимные положения тел относительно друг друга в течение времени, так же как и уровень N, на котором находится соответствующее изобретению устройство. На фиг. 9 положения тел друг относительно друга находятся в квадратуре (дефазированы на четверть периода) вперед относительно уровня N, в котором находится устройство, что позволяет получить волны максимальной величины, в то время как на фиг. 10 положение тел друг относительно друга приведено в положение квадратуры вперед относительно уровня N, на котором находится устройство.
На фиг. 11 показан схематический вид блока, излучающего сигнал в тот момент, когда тело, в особенности плавучее тело, должно претерпеть погружение в жидкость, в которой или на поверхности которой должно быть создано движение.
На фиг. 1 показано
устройство, предназначенное для создания движения в жидкости, в особенности на ее поверхности 8, причем жидкость содержится в водоеме, ограниченном станками. Это устройство содержит элемент
контактирования с жидкостью, в которой или на поверхности которой должно быть создано движение. В показанном на фиг. 1 поперечном сечении элементом контактирования с жидкостью, например на поверхности
которой должно быть создано движение, является плавучий агрегат 1, не имеющий связи со стенкой водоема. Этот агрегат содержит:
- первое тело 1, выполненное в виде кожуха или бака 2 в виде
усеченного конуса, имеющего дно 3 и плавучий валик 4,
- второе тело 5, связанное с первым телом 1 при помощи средства 7, предназначенного для осуществления перемещения второго тела в кожухе 2
относительно основания 3. Перемещение (X) тел друг относительно друга создает движение в жидкости, в особенности на поверхности 8 жидкости, содержащейся в бассейне.
Устройство содержит также пружины 9, предназначенные для компенсации, по меньшей мере частичной, эффекта тяжести второго тела 5 на первое тело 1. Эти пружины опираются одним из своих концов на основание 3 первого тела, в то время как стороны 10 второго тела покоится на другом конце пружин 9. Эта сторона 10 параллельно основанию 3 первого тела.
Второе тело содержит две камеры 11, 12, отделенные одна от другой перегородкой. Верхняя камера 11 содержит мох, пропитанный водой, эта вода служит для увеличения веса второго тела. Для увеличения веса второго тела могут быть использованы свинцовые бруски и пр.
Однако использование мха, пропитанного водой, позволяет при удалении воды уменьшать общий вес устройства, когда последнее должно быть изъято из бассейна.
Мох позволяет избежать чрезмерного движения содержащейся в камере 11 воды.
Вторая или нижняя камера 12 содержит систему управления 14 перемещением стержня 13 толкателя, который действует как средство 7, предназначенное для перемещения одного тела относительно другого.
Система управления 14 содержит устройство регулирования 15 насоса 16, установленного на трубопроводе 17, связывающем часть 19 толкателя 7, расположенную под его поршнем, с резервуаром 20. Часть 21 толкателя, расположенная над поршнем 18, связана с резервуаром 20 трубопроводом 22.
Устройство регулирования 15 насоса 16 воздействует на приводящий его в движение двигатель 28. Это устройство 15 регулирует энергию, подводимую к двигателю насоса, от батареи 23, размещенной во второй камере 12.
В том случае, когда система регулирования 15 функционирует при помощи газа, или когда резервуар 20 оборудован упругой мембраной, образуется простая система для компенсации, по меньшей мере частичной, тяжести второго тела на первое, при помощи толкателя, связанного с резервуаром, объем которого превышает в три раза объем толкателя. Газом может быть сжатый воздух. Объем резервуара и давление газа выбираются таким образом, чтобы получить приблизительно линейный эффект компенсации.
Система может быть использована для перемещения тел друг относительно друга и содержать блок производства газа или резервуар газа или сжатого воздуха, этот газ или сжатое рабочее тело предназначены для приведения в действие толкателя. В качестве примера блока производства сжатого газа может служить блок, в котором идет химическая и/или физическая реакция, таким блоком может быть, например, двигатель внутреннего сгорания, или камера, в которой карбид кальция смешан с водой.
Различные датчики связаны с устройством регулирования 15, чтобы последнее принимало в расчет положение тел друг относительно друга, а также погружение или ускорение.
Устройство также снабжено акселерометром (измерителем ускорения) 24 или датчиком 25, предназначенным для оценки амплитуды волн, таким как датчик эхо-сигнала глубины, датчиком 26, предназначенным для оценки погружения первого тела, и датчиком 27, предназначенным для измерения перемещения одного тела относительно другого.
Устройство регулирования 15 позволяет синхронизировать перемещение одного тела относительно другого с движением волн.
Второе тело 5 имеет преимущественно вес, который по меньшей мере в 5 раз превышает вес первого тела.
Помещали устройство, показанное на фиг. 1, в бассейн. Первым телом был цилиндрический бак высотой 70 см и диаметром 78 см. Этот бак был снабжен надувным валиком диаметром 25 см, закрепленным на половине высоты бака. Вес этого первого тела составлял 35 кг.
Второе тело имело вес 170 кг и перемещалось относительно первого тела при помощи двигателя мощностью 400 Вт. Пружины служили для компенсации тяжести второго тела на первое.
Максимальное перемещение тел друг относительно друга составляло порядка 10,2 см.
Регулировали скорость перемещения тел друг относительно друга таким образом, чтобы они удалялись друг от друга по меньшей мере более 30 раз в минуту таким образом, чтобы частота удаления тел относительно друг друга была близка резонансной частоте волн (около 0,5%).
Было отмечено, что при помещении соответствующего изобретению устройства в бассейн (50 м2) и приведении его в действие возможно получение по истечении от 3-х до 5 мин волн, имеющих высоту больше или меньше 80 см. Также заметили, что предложенное устройство во время этих испытаний имело способность перемещаться само собой в место бассейна, наиболее благоприятное для создания волн.
Если в качестве устройства используется погружаемое в жидкость устройство, то его следует поместить в наиболее благоприятное место для создания максимального волнения в жидкости.
Устройство, показанное на фиг. 1, содержит преимущественно систему регулирования, связанную с датчиком эхо-сигнала глубины. Эта система позволяет синхронизировать движения тел друг относительно друга в функции положения устройство относительно волны.
Устройство может быть также использовано для создания контрволн, то есть для создания, например, движения на поверхности воды, противодействующего волнам, создаваемым искусственным или естественным образом.
Устройство может быть также использовано в жидкостных многофазных системах, таких как системы, содержащие не смешивающиеся жидкости различной плотности. В этом случае соответствующее изобретению устройство является преимущественно частично плавучим относительно жидкости самой высокой плотности.
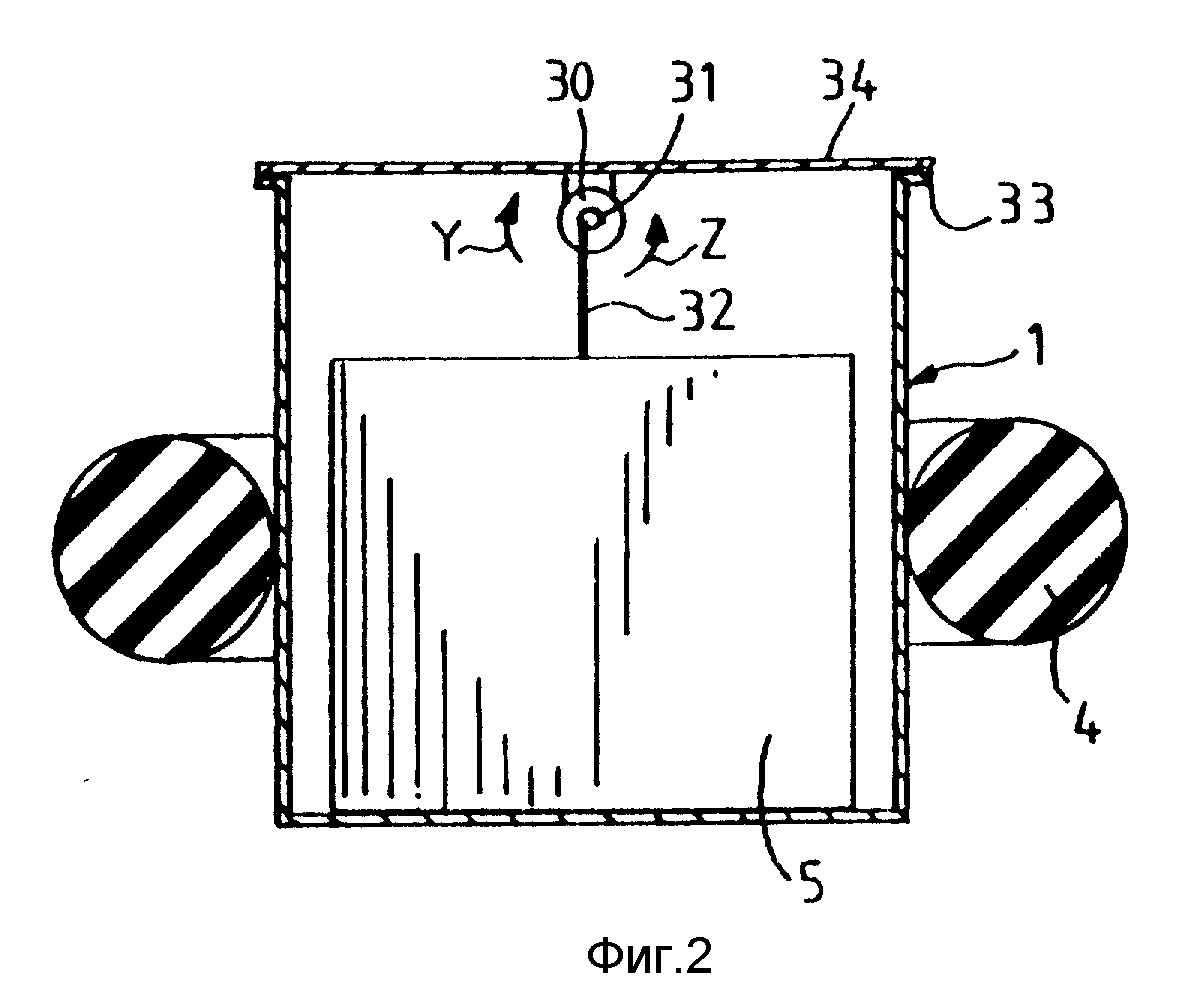
На фиг. 2 изображен другой вид осуществления изобретения.
Средство 7, предназначенное для перемещения первого тела 1 относительно корпуса 5, образовано мотором-редуктором 30, приводящим во вращение по стрелке Y вал 31, и тросом 32, идущим от этого вала 31 к второму телу 5. Мотор-редуктор 30 установлен на плите 34, которая закреплена на верхней реборде 33 корпуса 1.
В течение времени Y1 мотор-редуктор 30 остается включенным и трос (ремень) 32 наматывается на вал 31, что приводит к взаимному перемещению тел 1 и 5.
По истечении времени Y1 прерывают ток питания мотора-редуктора 30, при этом под действием силы тяжести второе тело опускается и ремень или трос 32 быстро разматывается.
При разматывании троса или ремня вал 31 приводится во вращение по стрелке Z. Вращение этого вала позволяет мотору, приводящему в движение редуктор, работать как динамомашина, что позволяет путем измерения напряжения контролировать величину опускания второго тела 5 относительно первого тела 1.
Как только второе тело 5 заканчивает спуск относительно первого тела, включает мотор-редуктор 30 таким образом, чтобы он приводил вал 31 во вращение по стрелке Z, что вызывает подъем тела 5 относительно тела 1.
Такой цикл функционирования устройства может повторяться.
Для получения желаемого периода движения можно осуществлять воздействие на вес второго тела 5, высоту подъема второго тела, торможение мотора-редуктора во время спуска второго тела и на мощность приводного двигателя редуктора.
На фиг. 3 и 4 показаны другие средства 7, которые могут быть использованы для осуществления перемещения тел 1 и 5 относительно друг друга.
Таким образом на фиг. 3 показан мотор-редуктор 40, приводящий во вращение диск 41, несущий по своей периферии четыре V-образных угольника 42.
Этот мотор-редуктор установлен на плите 43, закрепленной на верхней стороне первого тела 1.
Второе тело 5 связано со штоком 44, шарнирно соединенным с рычагом 45. Шток 44 может скользить во втулке 46, имеющейся в первом теле 1. Рычаг 45 имеет на своем свободном конце палец 47, предназначенный для вхождения в выемку U-образного угольника 43 (см. фиг. 5).
Такое устройство функционирует следующим образом.
Во время полуоборота A диска 41 рычаг 45 и шток 44 перемещаются вверх, при этом второе тело 5 поднимается.
Во время другого полуоборота S диска палец 47 не входит больше в выемку угольника 42, поэтому под действием силы тяжести второго тела 5 шток 44 и рычаг 45 быстро скользят во втулке.
На фиг. 4 показан другой вариант средств 7, которые могут быть использованы в изобретении.
Эти средства 7 образованы толкателем 50, рычаг 51 поршня 52 которого соединен с вторым телом 5.
Этот толкатель, или более точно камера 53 последнего, расположена под поршнем 52 и связана с насосом 54 при помощи трубопровода 55.
При использовании устройства в бассейне насос может забирать воду из бассейна для воздействия на поршень.
Толкатель закреплен на дне 3 тела 1 и снабжен клапаном 56, который может поворачиваться (стрелка Q) вокруг оси 57. Закрытие клапана 56 осуществляется при помощи защелки 58, управляемой электрически (движение защелки показано стрелкой P).
При нахождении поршня в верхнем положении управляют защелкой так, чтобы позволить клапану 56 поворачиваться вокруг оси 57.
Этот поворот или открывание клапана осуществляется естественным образом под действием тяжести тела 5 и благодаря тому, что ось 57 установлена со смещением относительно оси симметрии клапана 56.
Действие тяжести тела 5 позволяет осуществить удаление воды, содержащейся в камере 53 толкателя 50, что происходит до тех пор, пока палец 59, соединенный с поршнем 52, не упрется в поверхность заслонки и не вызовет поворот последней и закрытие ее защелкой.
Такой цикл функционирования может повторяться.
Вместо использования толкателя в качестве средства 7, предназначенного для осуществления взаимного перемещения тел 1 и 5, можно использовать систему, содержащую шатун, кривошипно-шатунный механизм или кулачок и др.
Далее описывается использование кривошипно-шатунного механизма в устройстве, изображенном на фиг. 6.
Центр тяжести тела 5 близок к центру приложения подъемной силы или к ватерлинии устройства, чтобы обеспечить относительную стабильность устройства, преимущественно стабильное состояние равновесия.
На фиг. 6 приведено поперечное сечение другого вида реализации изобретения.
Это устройство имеет сферический кожух 2 и тело 5, связанное с кожухом 2 при помощи средства 7.
Тело 5 образовано рядом дисков 119, имеющих центральное отверстие, в которое помещается втулка Эрталона (Ertalon)® . В центральном отверстии этой втулки может проходить направляющий стержень 121, соединенный с кожухом 2. Использование втулки Эрталона позволяет ограничить силы трения, существующие при скольжении втулки вдоль стержня 121.
Средство 7 содержит:
- двигатель 122, установленный на втором теле 5, вал 123 которого приводит
во вращение редуктор 124, в последующем изложении совокупность мотор-редуктор обозначается позицией 150.
- кривошип 125, приводимый в движение валом 140 редуктора, и
- шатун
126, связанный одним из своих концов при помощи пальца 127 с кривошипом 125, а другим концом при помощи пальца 128 - со стержнем 121.
Шатун и кривошип располагаются в плоскостях, параллельных стержню 121. Вращение вала 123 и, следовательно, вала 140 вызывает вращение кривошипа 125, что приводит к перемещению вдоль стержня или тяги 121 тела 5 (стрелка Q).
Одна или несколько пружин 9 установлены между пальцем 128 и телом 5 для компенсации, по крайней мере частичной, эффекта силы тяжести.
Устройство содержит систему управления, размещенную вне сферы. Эта система управления осуществляет подачу питания мотора-редуктора 150 по кабелю 129. Этот кабель соединен с распределительной коробкой 141, из которой идут два провода 142 питания мотора-редуктора и провода 144, 143, 145 к датчику ускорения 77, датчику синхронизации 76 (контролирующему положение кривошипно-шатунного механизма) и к датчику скорости 60.
Кабель 129 позволяет осуществлять передачу сигналов датчиков в систему управления. Кабель 129 позволяет также устройству, показанному на фиг. 6, свободно перемещаться по поверхности 8 воды.
Система управления осуществляет подачу питания на мотор-редуктор 150. Передаваемое по кабелю 129 напряжение питания мотора-редуктора 150 может изменяться от 0 до 24 В. Система позволяет получать ошибку по скорости, не превышающую ±0,5%, однако это не означает, что напряжение имеет постоянное значение. Применено питание такого типа, которое позволяет осуществлять регулирование в двух квадрантах, то есть торможение или увеличение скорости вращения, при этом направление вращения остается всегда одним и тем же.
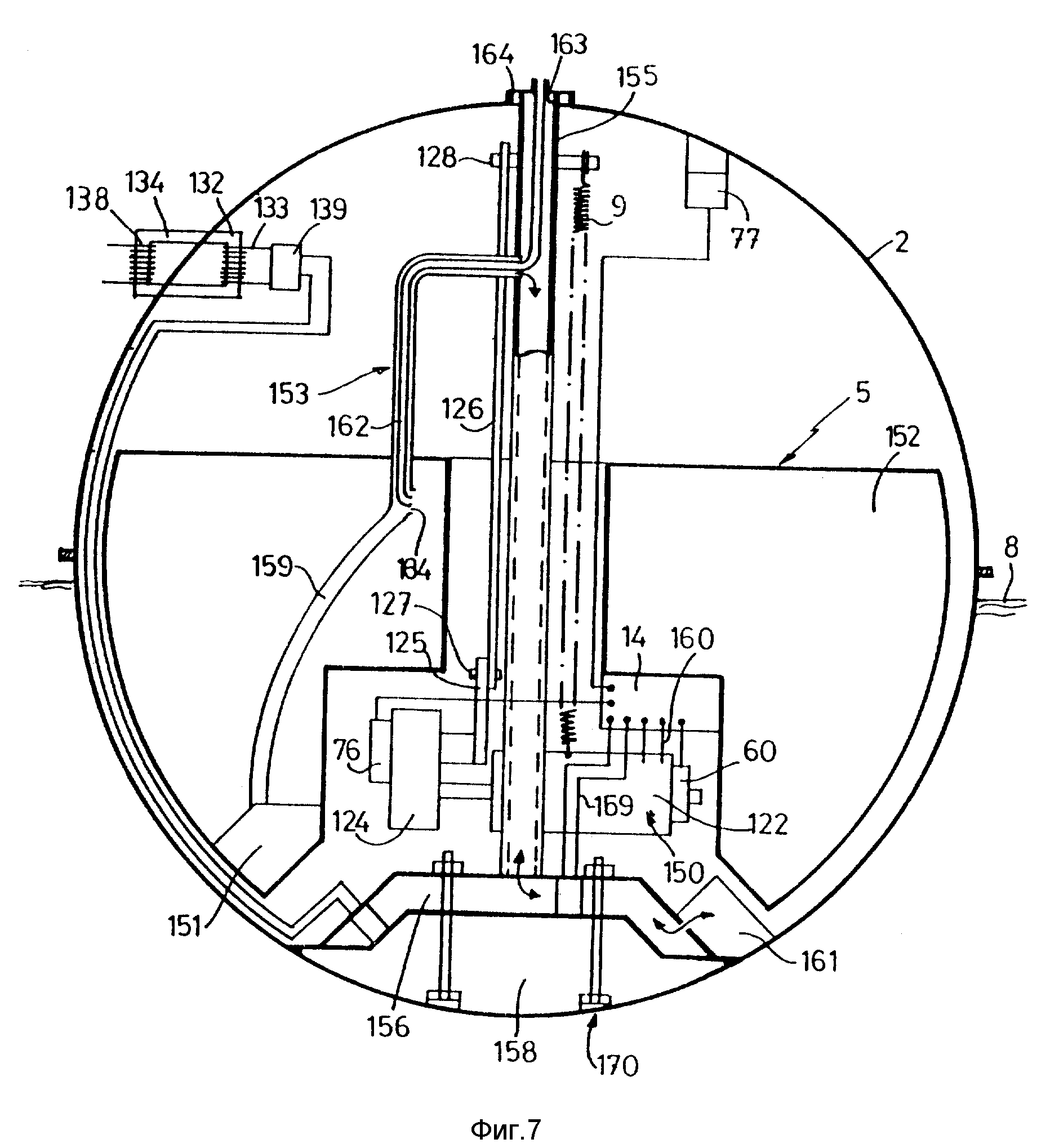
Устройство, показанное на фиг. 7, содержит сферический кожух 2, в котором перемещается тело 5, имеющее центральное отверстие, в котором может перемещаться направляющий орган 155, закрепленный на сферическом кожухе 2, этот орган имеет форму втулки.
Тело 5 содержит:
- камеру 152, предназначенную для заполнения водой с целью увеличения веса тела 5,
- мотор-редуктор 150, приводящий в движение кривошип 125, соединенный
пальцем 127 с шатуном 126, один из концов которого соединен пальцем 128 с направляющим органом 155,
- систему управления 14, и
- насос 151, предназначенный для опорожнения камеры
152.
Сферический кожух 2 имеет в своей нижней части полость, в которой размещена батарея 158, подпитывающая током устройство, так же как и насосы опорожнения 151 и наполнения 161 камеры 152. Эта батарея закреплена на кожухе 2, например, при помощи шпилек с резьбой и гаек 170.
Устройство снабжено средством 9 для компенсации, по меньшей мере частичной, действия тяжести тела 5. Это средство 9 образовано пружиной, которая проходит между стержнем 128 и мотором-редуктором 150, соединенным с камерой 152.
Насос наполнения 161 установлен на сферическом кожухе 2. Насос наполнения 161 и насос опорожнения 151 связаны между собой каналом 153. Этот канал 153 имеет камеру 156, объем которой соответствует свободному пространству в полости при установке батареи 158. Канал также образуется втулкой 155 и гибким шлангом 159, проходящим между насосом опорожнения 151 и втулкой 155.
Для осуществления заполнения камеры 152 и для ее опорожнения имеется труба 162, идущая от камеры 152 в сферический кожух 2, позволяющая осуществлять удаление или нагнетание воздуха в камеру 152.
В показанном на фиг.7 виде осуществления изобретения эта труба 162 заходит через проход к гибкой трубе 159 и канал 153 и выходит через конец 163 втулки 155, противоположный концу, смежному с батареей 158. Крышка 164, имеющая отверстие для свободного прохода трубы 162, закрывает конец 163 втулки 155, противоположный концу, смежному с батареей 158.
Проход, имеющийся в гибком шланге 159 для ввода трубы 162 в канал 153, имеет преимущественно поверхность, превышающую площадь поперечного сечения трубы 162, чтобы позволить осуществлять сообщение между каналом 153 и верхней частью камеры 152 (позиция 184). Этот проход 184 имеет малые размеры по сравнению с поперечным сечением трубы 159, что позволяет избежать эффекта сифона для канала 153.
Далее кратко описываются операции опорожнения и заполнения камеры 152.
Для заполнения камеры 152 насос 161 запускает воду в камеру 156 и через канал 153 вода поступает в камеру 152. Эта вода выходит через насос опорожнения, который не включен. Во время этой операции имеющийся в камере 152 воздух удаляется по трубе 162. Следует отметить, что, как только почти полный объем воздуха удален, функционирование насоса 161 позволяет осуществить проход воды по трубе 162. Эта вода выходит тогда через смежный с крышкой 164 конец. Таким образом получают устройство, снабженное фонтаном.
При прекращении действия насоса 161 наличие связи позволяет избежать опорожнения камеры 152 под действием эффекта сифона.
Для опорожнения камеры 152 приводят в действие насос 151 (при остановленном насосе 161). Этот насос 151 подает воду в канал 153 к насосу 161, и эта вода выходит через насос 161.
Система управления получает сигналы датчика скорости 60 приводного двигателя 122 редуктора 124, датчика синхронизации 76 и датчика ускорения 77. Система контроля обозначена поз.14.
Ток от батареи 158 подводится к системе контроля при помощи проводов 169. Этот ток изменяется в системе контроля 14 до того, как поступить по проводам 160 к приводному двигателю 122 редуктора 124.
Батарея 158 может подзаряжаться при помощи тока, поступающего за счет магнитной связи. Для осуществления этой магнитной связи кожух содержит половину магнитного контура 132, вокруг которой намотана обмотка 133. Эта обмотка связана при помощи выпрямителя (включающего в себя электрический звонок) 139 с батареей 158.
Для осуществления зарядки батареи 158 достаточно совместить половину 132 магнитного контура с другой его половиной 134 и запитать эту другую половину 134 от источника переменного тока.
На фиг.8 приведена система управления перемещением тел относительно друг друга.
Эта система управления состоит:
- из блока 74 автоматического регулирования скорости мотора-редуктора, блока, предназначенного для изменения напряжения питания мотора-редуктора для получения скорости вращения вала редуктора, близкой
к желаемой скорости, с точностью, например, до ±0,5% (например, скорость вращения вала 140 редуктора составляет от 20 до 40 оборотов в минуту), и
- блока 75 автоматического
регулирования по фазе, предназначенного для контроля фазы перемещения между собой тел относительно фазы движения, создаваемого в жидкости или на ее поверхности.
Блок автоматического регулирования скорости 74 связан с датчиком скорости 60, соединенным с приводным двигателем 122 редуктора, и с датчиком синхронизации 76 вала мотора-редуктора 124, то есть с кривошипно-шатунным механизмом.
Блок автоматического регулирования по фазе 75 связан с датчиком ускорения 77 и с датчиком синхронизации 76.
Устройство управления, включающее в себя блок автоматического регулирования скорости 74 и блок автоматического регулирования по фазе 75, преимущественно является частью микропроцессора 78, показанного штриховой линией.
Микропроцессор 78 вырабатывает сигнал управления блоком питания 131 приводного двигателя 122 редуктора 124.
Блок автоматического управления скорости 74 содержит:
- элемент
памяти 81 для хранения опорной величины скорости мотора-редуктора, которая передается по кабелю 82 к блоку питания 131,
- элемент памяти 83 для хранения эталонного значения периода вращения
мотора-редуктора,
- элемент считывания 106 сигналов, поступающих от датчиков,
- элемент тестирования 107 для определения, закончен ли оборот мотора-редуктора, причем при
отрицательном ответе вновь возвращаются к считыванию сигналов датчиков элементов 106,
- блок обработки сигналов 84, поступающих с датчика скорости 60 и с датчика синхронизации 76,
предназначенный для определения среднего периода вращения мотора-редуктора (среднего за несколько оборотов мотора-редуктора),
- блок определения 85 отклонения среднего значения периода
вращения мотора-редуктора от эталонного значения,
- блок 86 формирования сигнала изменения опорной величины скорости мотора-редуктора в функции измеренной ошибки (например, путем увеличения
или уменьшения опорной величины на величину, равную ошибке, умноженной на постоянный коэффициент) таким образом, чтобы осуществить регулирование скорости двигателя.
Блок
автоматического регулирования по фазе 75 содержит:
- элемент считывания 93 сигналов с датчика 77 ускорения и элемент считывания 94 с датчика синхронизации 76,
- элемент тестирования
95 момента завершения оборота мотора-редуктора, если оборот не закончен, повторно обращаются к этапу считывания при помощи элемента 94,
- блок обработки 87 сигналов, поступающих с датчика
ускорения 77, служащий для определения периода волны, среднего периода волн (среднего на определенном промежутке времени) и максимальной и минимальной амплитуды волн. Этот блок 87 позволяет определить,
исходя из этих величин, момент прохода волн через определенное состояние,
- блок 98 выделения резонансной частоты волн (например, за счет преобразования Фурье или Гамильтона),
- блок 88 определения разности фаз редуктора и волны, служащий для определения средней скорости мотора-редуктора, ее периода и сравнения момента прохода волны через определенное состояние (например,
состояние, в котором волна достигает среднего уровня) и момента прохода через крайнее состояние кривошипно-шатунного механизма. Таким образом, блок 88 служит для определения существующей разницы между
фазой мотора-редуктора и фазой волны,
- блок 89 сравнения средней величины разности фаз с опорной величиной.
Этот блок 89 определяет среднюю величину различия по фазе,
полученную блоком 88, и сравнивает эту среднюю величину с опорной величиной в элементе памяти 90,
-тест-элемент 99 сравнения частоты мотора-редуктора с резонансной частотой волн, причем в
указанном тест-элементе амплитуда волн сравнивается с заранее определенной величиной (10 см, что соответствует приблизительно 10% диаметра сферического кожуха). Если различие между скоростью
мотора-редуктора и резонансной частотой меньше 5%, или если амплитуда превышает заранее определенную величину, то средняя величина различия по фазе направляется в блок 91. В противном случае
возвращаются вновь к этапу считывания в элементах 93, 94 для осуществления нового цикла автоматического управления по фазе,
- блок 91 коррекции эталонного значения скорости мотора-редуктора в
элементе памяти 92. Эта величина передается на блок питания 131 мотора-редуктора. Этот цикл автоматического управления затем повторяется, начиная со считывания в элементах 93, 94.
Блок 91 определяет направление корректировки скорости так же как необходимые изменения скорости для уменьшения различия по фазе. Эти изменения представляют собой минимальную величину между предварительно определенными максимальными изменениями и произведением усиления на измеренную фазовую разницу. Приблизительно 10% диаметра сферического кожуха.
Блок содержит ячейку, предназначенную при осуществлении слишком больших коррекций в одном и том же направлении для изменения базовой скорости мотора-редуктора.
Можно отметить, что микропроцессор может содержать блок, предназначенный для изменения желательных величин различия по фазе (элемент памяти 90) и по скорости (элемент памяти 83), чтобы можно было изменять вид движения волн или чтобы поместить устройство в бассейн, в особенности на его поверхность. В самом деле, можно создать возможность перемещения устройства, создавая изменения различия по фазе.
На фиг. 9 и 10 показаны на оси времени положения тел относительно друг друга, так же как и уровень N, на котором находится соответствующее изобретению устройство.
на фиг. 9 показано положение тел относительно друг друга с целью получения волн максимальной амплитуды. Как можно заметить, тело 5, перемещающееся относительно кожуха 2, имеет опережение по фазе на 90o, то есть тело 5 находится в своем среднем положении при расположении соответствующего изобретению устройства на максимальном или минимальном уровне волны (момент времени t1, t3, t5), и в крайнем положении, когда устройство находится в среднем положении (момент времени t2, t4). Действительно, тело 5 находится в своем крайнем нижнем положении в момент времени t2 который сдвинут на четверть периода относительно момента времени t3, когда волна достигнет своего минимального уровня.
Если хотят быстро погасить волнение в бассейне, то тогда изменяют фазу перемещения тел между собой таким образом, чтобы это перемещение было в квадратуре назад относительно движения волн.
На фиг.10 устройство дефазировано на -90o (квадратура назад) относительно волны. В момент времени t2 тело 5 находится в среднем положении, в то время как волна имеет максимальный уровень. В момент времени t3 волна имеет некий промежуточный уровень между максимальным уровнем и средним уровнем, в то время как тело 5 приближается к вершине кожуха 2. В момент времени t3 тело 5 находится вблизи вершины кожуха 2, в то время как устройство располагается на промежуточном уровне между максимальным уровнем и средним уровнем. В момент времени t5 тело опускается и к моменту времени t6 достигает среднего положения. Минимальный уровень достигается в момент времени t6.
Для того, чтобы привести устройство в положение сдвига на 90o вперед по фазе (показанная на фиг. 10 ситуация), изменяют скорость вращения двигателя в момент времени t8 (момент, когда кривошипно-шатунный механизм находится в нижнем мертвом состоянии, это положение показано на фиг.6).
На фиг.10 показаны также положения кривошипа в ходе времени. В показанном изображении точка C обозначает точку связи шатуна и кривошипа, а черточка T показывает положение кривошипа относительно точки C.
В показанном на фиг. 10 случае в момент времени t8 уменьшают скорость вращения мотора на фактор два, так что после полуоборота кривошипа тело 5 будет располагаться вблизи вершины кожуха 2, в то время как устройство находится на среднем уровне (момент времени t16). Между моментами времени t8 и t16 тело 5 проходит из положения, смежного с основанием кожуха 2, в положение, смежное с вершиной кожуха 2.
В момент времени t16 устанавливают нормальную скорость вращения мотора.
Предметом настоящего изобретения является также создание системы, вырабатывающей сигнал в тот момент, когда тело, в особенности плавучее тело, должно претерпевать погружение в жидкость, в которой или на поверхности которой должно быть создано движение.
Такая система встроена в устройство. Кроме того, такая система может быть использована для определения момента, когда пловец должен погрузить плавучее тело в жидкость, чтобы получить движение, в частности, на водной поверхности бассейна.
Эта система содержит датчик ускорения 200, связанный с микропроцессором 201 (см. фиг. 11).
Благодаря наличию сигналов, поступающих от датчика ускорения 200 к микропроцессору 201, могут быть определены период, минимальный и максимальный уровни волны, так же как и момент прохождения волной движения на поверхности или в объеме жидкости своего специфического состояния (в частности, для случая бассейна, состояния, при котором волна достигает среднего уровня). Исходя из этих величин, микропроцессор при помощи блока 202 поиска определяет резонансные частоты волн в водоеме или бассейне. Этот этап поиска резонансных частот может осуществляться при помощи преобразования Фурье или Гамильтона.
После определения резонансной частоты микропроцессор определяет период резонанса и момент, когда плавучее тело должно быть погружено в жидкость. В этот момент микропроцессор вырабатывает сигнал, направляемый в систему автоматического регулирования 203. Это может быть, например, звуковой сигнал, световой сигнал и др., которые предупреждают пловца о том, что ему следует погрузить плавучее тело.
Система автоматического регулирования 203 содержит блок 204 опережения выработки сигнала предупреждения, чтобы принять во внимание время ответа пловца.
Что касается частного вида осуществления устройства, показанного на фиг. 6, в котором микропроцессор определяет период мотора для получения или приближения к резонансному периоду волны (с точностью 0,5%), то эта величина периода мотора (двигателя) хранится в элементе памяти 83 блока автоматического регулирования по скорости 74.
Наконец, плавучее тело может также содержать датчик давления 205, предназначенный для определения силы, оказываемой пловцом при погружении тела. Измерение давления может осуществляться при использовании плавучего тела из упругого материала. В этом случае прикладываемая пловцом сила вызывает деформацию тела и, в результате, изменение объема плавучего тела и, следовательно, давления внутри него. Это измерение давления направляется в микропроцессор и принимается в расчет для определения момента, в который следует погрузить тело для получения волны максимальной амплитуды.
Само самой разумеется, что различные модификации могут быть внесены в устройство.
Так, например, необходимая для осуществления функционирования устройства энергия может быть получена от батарей, солнечных элементов, перезаряжаемых, например, при помощи магнитной связи батарей, и т.п.
Что касается акселерометра, то для этой цели может быть использован измеритель напряжения, соответствующего движению нагрузки.
Система управления устройства может размещаться вне этого устройства или находиться в нем. Устройство может быть снабжено приемопередатчиком сигналов, например радиосигналов, эти сигналы улавливаются или излучаются приемопередатчиком, связанным с микропроцессором.
Для бассейнов небольших размеров (например, имеющих площадь поверхности до 50 м2) энергия, необходимая для получения волн значительной амплитуды при помощи показанного ан фиг. 5 устройства (диаметр сферического кожуха которого составляет ± 0,75 м), составляет около 100 Вт. Эта энергия может быть уменьшена до 40 Вт, если должны быть получены волны малой амплитуды (общий вес устройства ± 100 кг).
Устройство может быть использовано в замкнутых или полузамкнутых водоемах для получения резонансных движений, таких как бассейны, плавательные бассейны, бассейны очистки сточных вод, бассейны грязевой обработки, бассейны декантации и др. в химическом производстве и т.п.
Движение тел относительно друг друга является вертикальным. Однако это движение может быть и горизонтальным. Это движение может быть непрерывным или прерывистым, импульсным или синусоидальным.
Наконец, для случая использования устройства в бассейне можно предусмотреть установку вдоль его стенок препятствий, предназначенных для уменьшения глубины бассейна вдоль этих стенок и, следовательно, ограничения высоты волн вдоль стенок и, следовательно, ограничения высоты волн вдоль стенок бассейна.
Эксперименты также показали, что движения вблизи дна бассейна носят особый характер и способствуют сбору мусора в определенных местах на дне. Это позволяет облегчить проведение очистки бассейна, так как грязь локализована в определенных местах.
Эти эксперименты также показали, что можно получать волны различной природы (такие как одиночные волны и др.) в зависимости от вида их возбуждения (непрерывный вид или прерывистый, синусоидальный или импульсный).
Реферат
Данное изобретение касается создания устройства, предназначенного для создания движения в жидкости, в частности на ее поверхности, причем жидкость содержится в водоеме, ограниченном одной или несколькими стенками, в частности в бассейне. Устройство содержит элемент контактирования с жидкостью, на поверхности которой должно быть создано движением. Устройство содержит плавучий или погруженный агрегат, не закрепленный на стенке водоема, содержащий два тела 1,5, соединенных между собой при помощи средства 7, предназначенного для перемещения тел 1,5 относительно друг друга таким образом, чтобы создавать движение в жидкости, в частности на ее поверхности. 12 з.п. ф-лы, 11 ил.

Комментарии