Устройство, системы и способы доставки семян - RU2711943C2
Код документа: RU2711943C2
Чертежи
Описание
УРОВЕНЬ ТЕХНИКИ
В последние годы в сельскохозяйственной промышленности признана необходимость более оперативного проведения посевных работ вследствие ограниченного времени, в течение которого такие посевные работы являются агрономически предпочтительными или (в некоторые периоды вегетации) даже возможными по причине неблагоприятной погоды. Однако буксировка посевного орудия по полю с более быстрой скоростью повышает скорость размещаемых семян относительно земли, заставляя семена катиться и сталкиваться при приземлении в борозде и приводя к непостоянному интервалу между семенами. В данной области хорошо известны неблагоприятные агрономические результаты плохого размещения семян и непостоянного интервала между семенами.
В связи с этим существует потребность в устройстве, системах и способах эффективной доставки семян в борозду, сохраняя в то же время точность размещения семян как при низких, так и при высоких скоростях орудия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
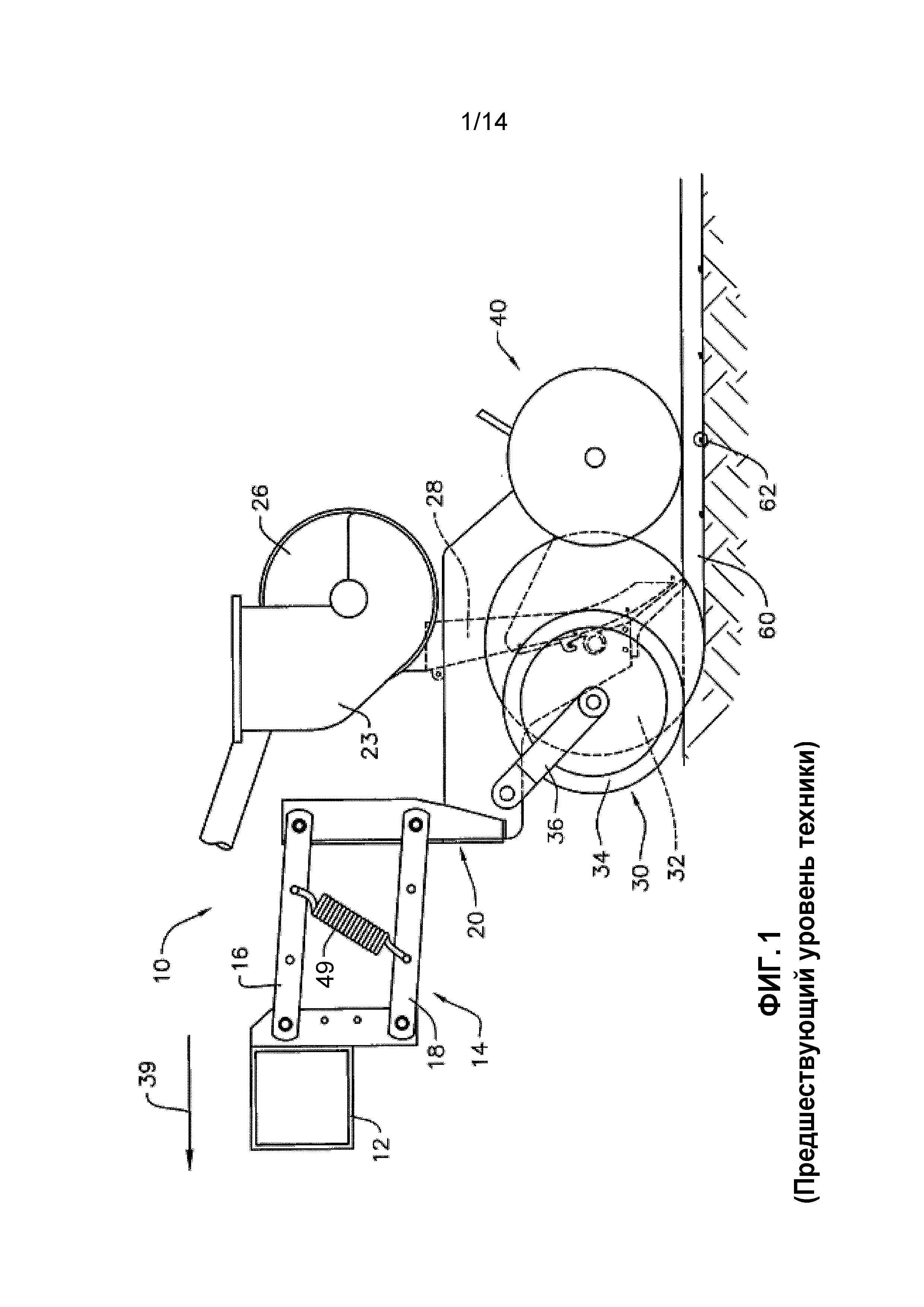
ФИГ. 1 представляет собой вертикальный вид сбоку высевающей секции сельскохозяйственной сеялки для пропашных культур предшествующего уровня техники.
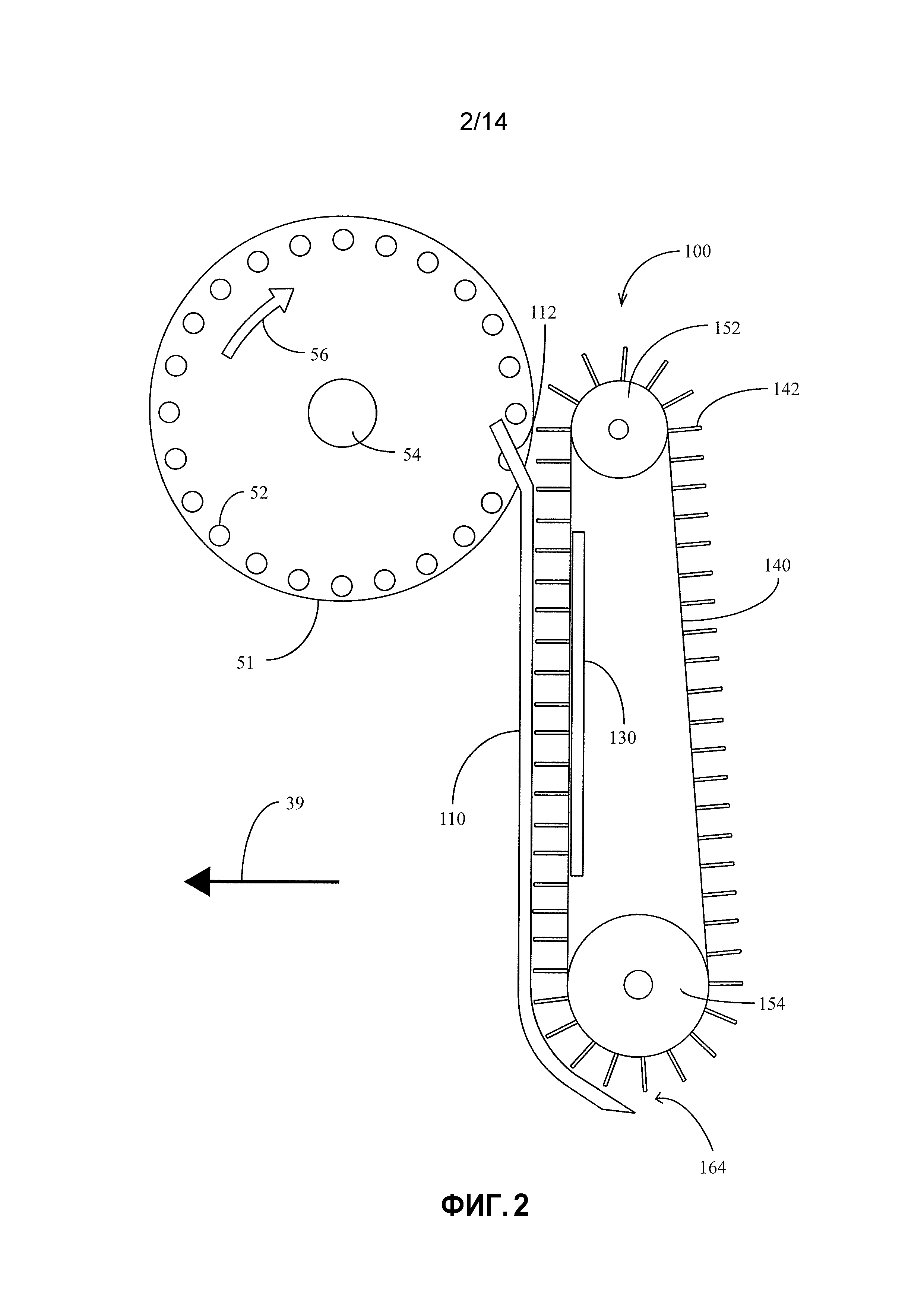
ФИГ. 2 представляет собой вертикальный вид сбоку варианта осуществления высевающего транспортера, взаимодействующего с высевающим диском.
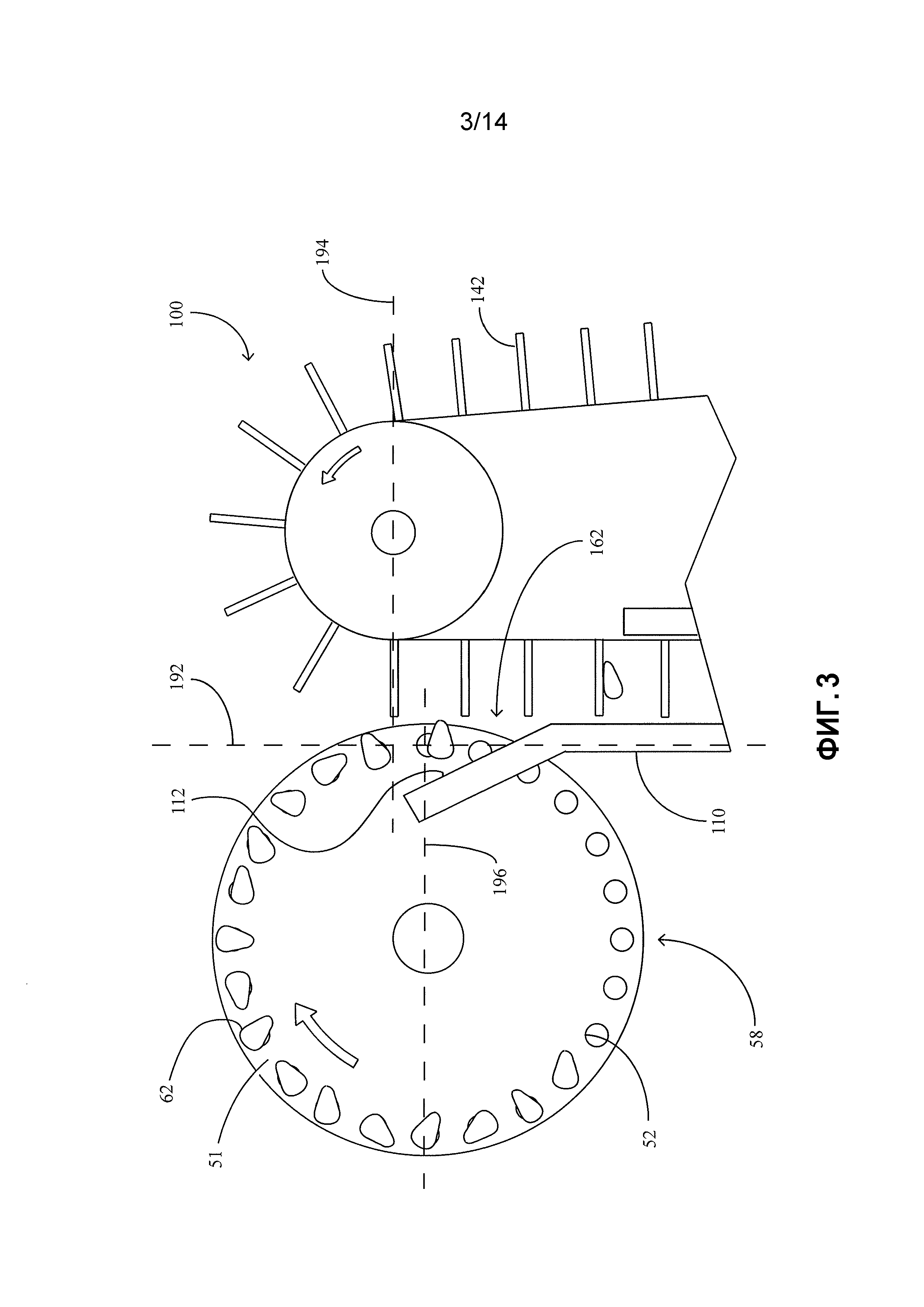
ФИГ. 3 представляет собой частичный вертикальный вид сбоку варианта осуществления высевающего транспортера, взаимодействующего с высевающим диском.
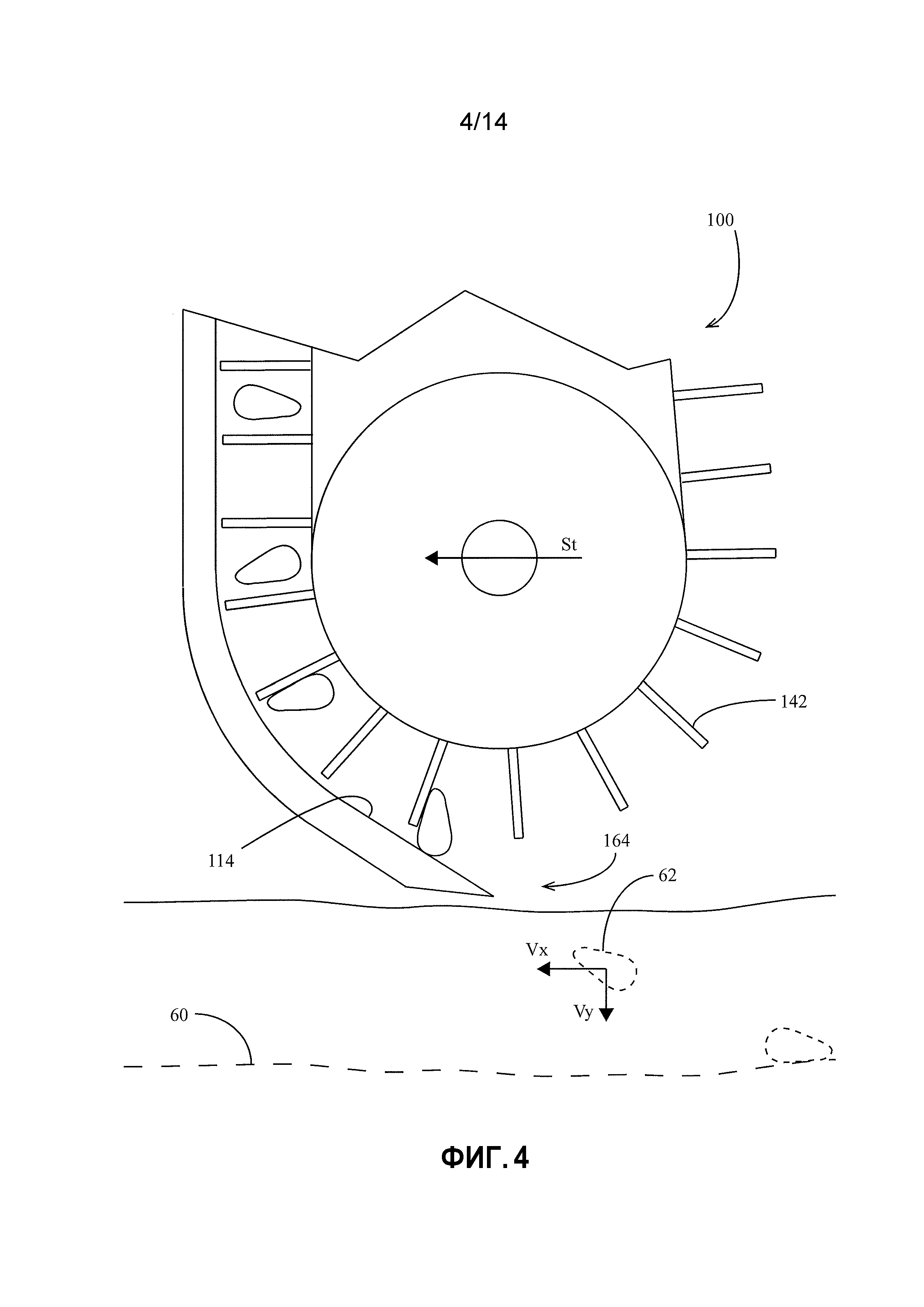
ФИГ. 4 представляет собой частичный вертикальный вид сбоку варианта осуществления высевающего транспортера, размещающего семена в семенной борозде.
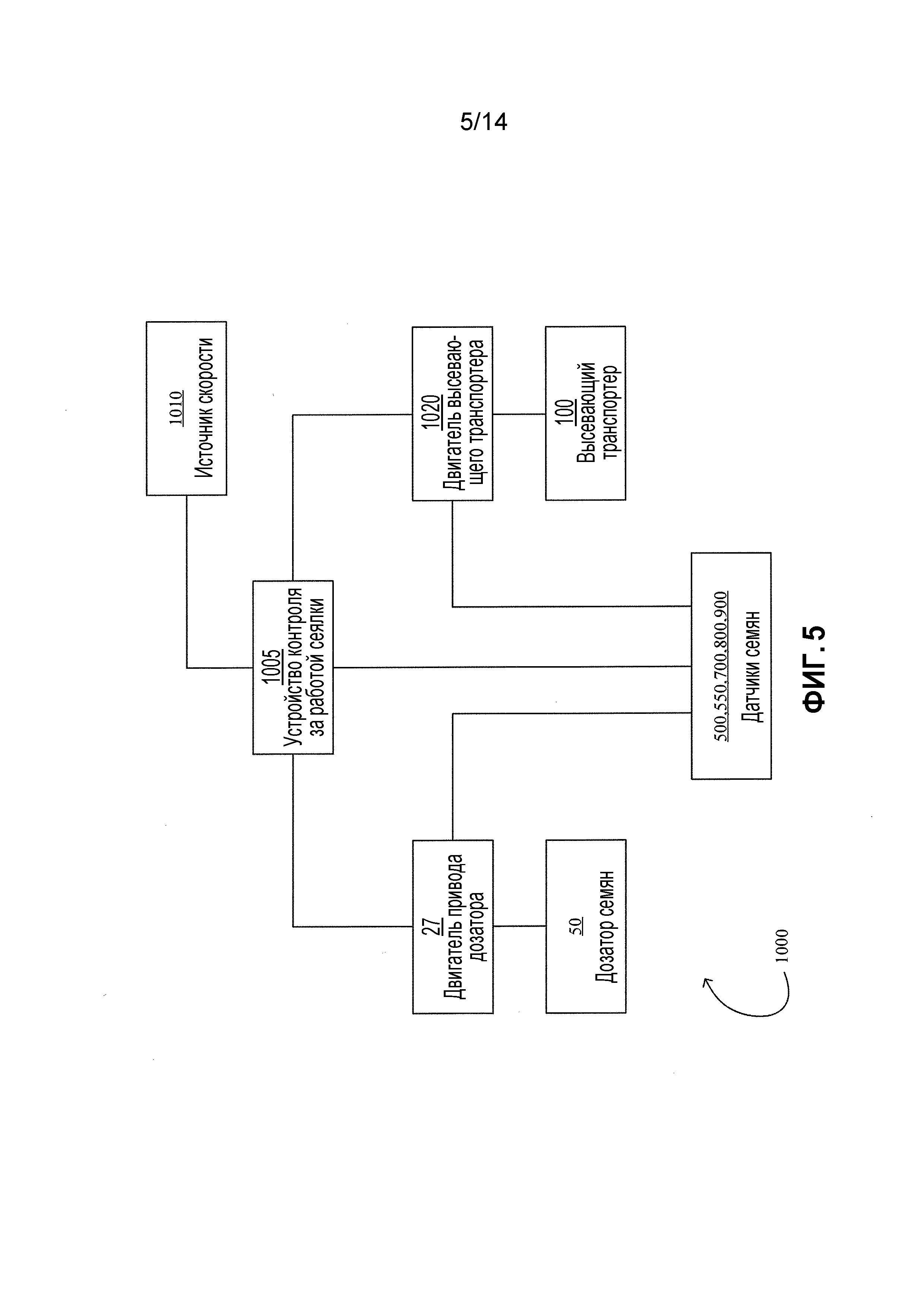
ФИГ. 5 представляет собой схематичную иллюстрацию варианта осуществления системы управления высевающим транспортером.
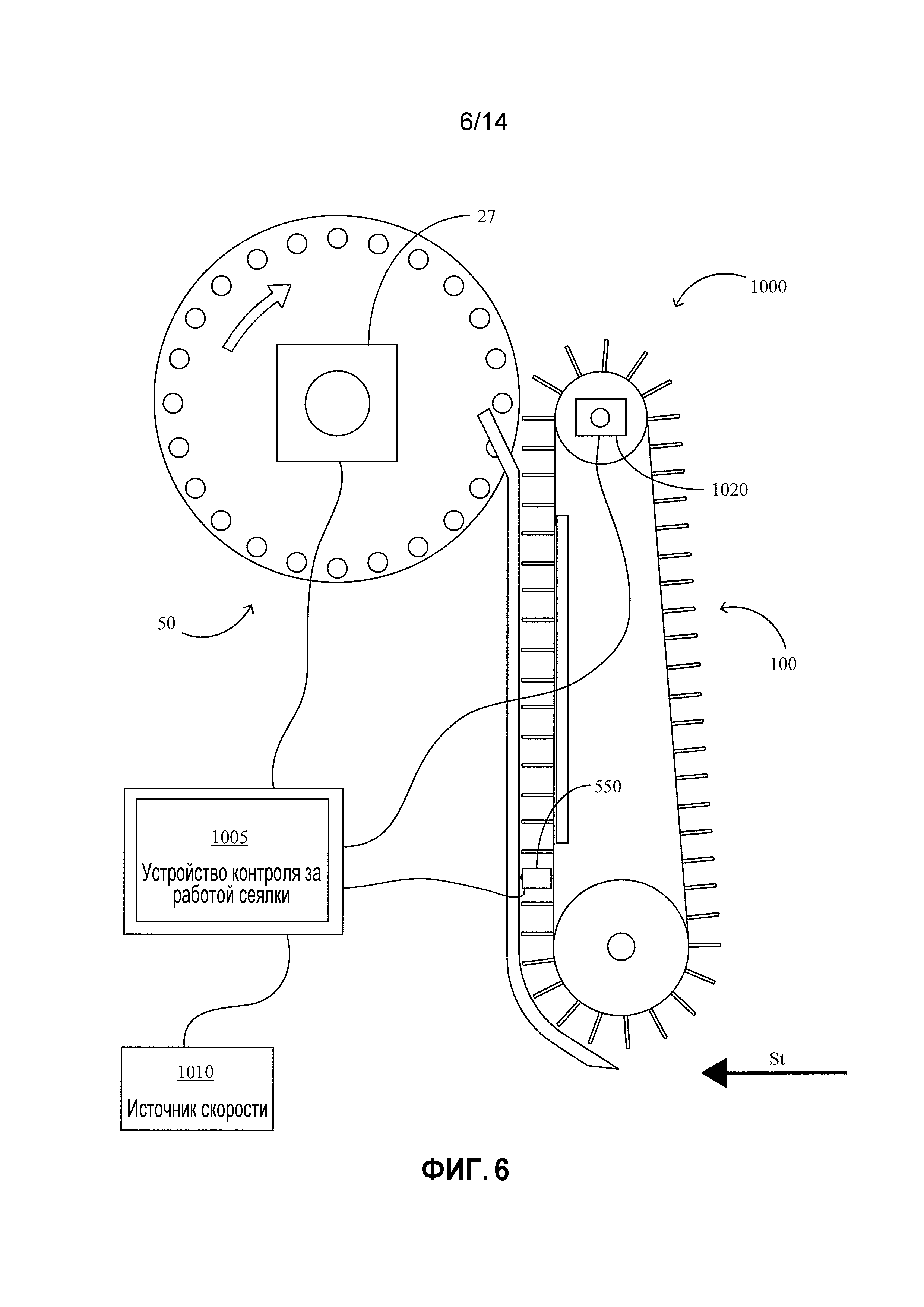
ФИГ. 6 иллюстрирует вариант осуществления системы управления высевающим транспортером.
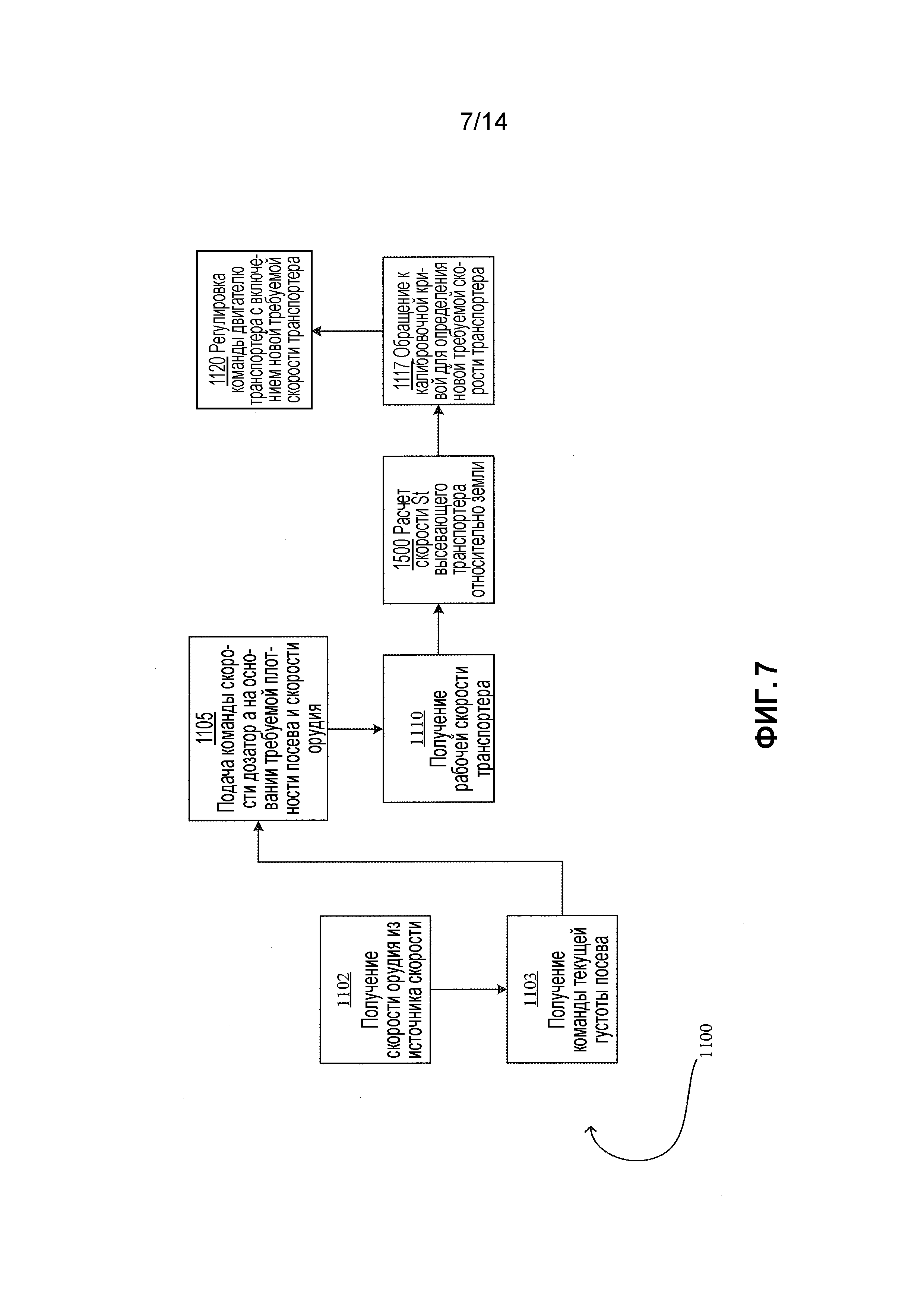
ФИГ. 7 иллюстрирует вариант осуществления способа управления высевающим транспортером.
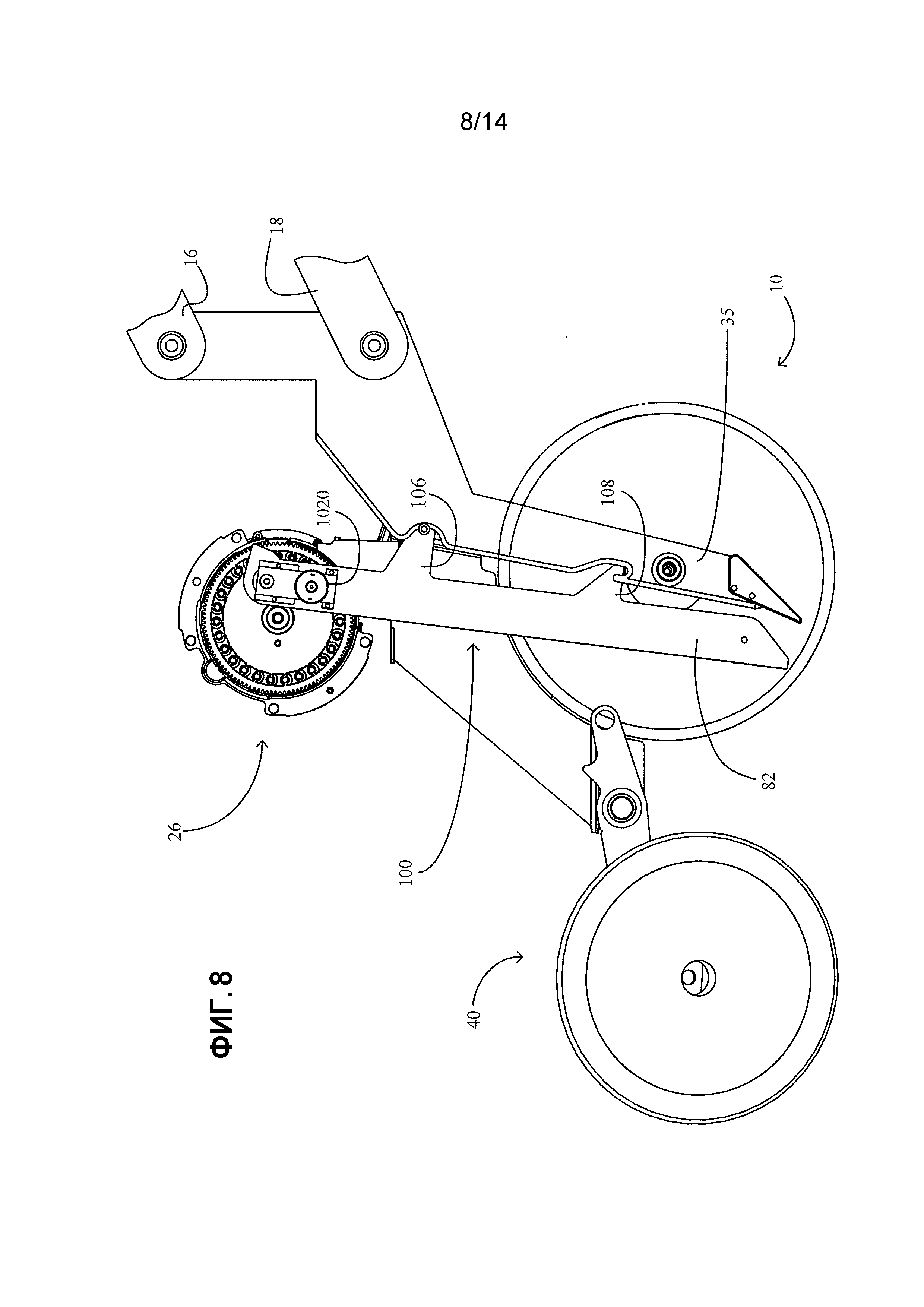
ФИГ. 8 представляет собой вертикальный вид сбоку варианта осуществления высевающей секции сеялки, взаимодействующей с вариантом осуществления высевающего транспортера.
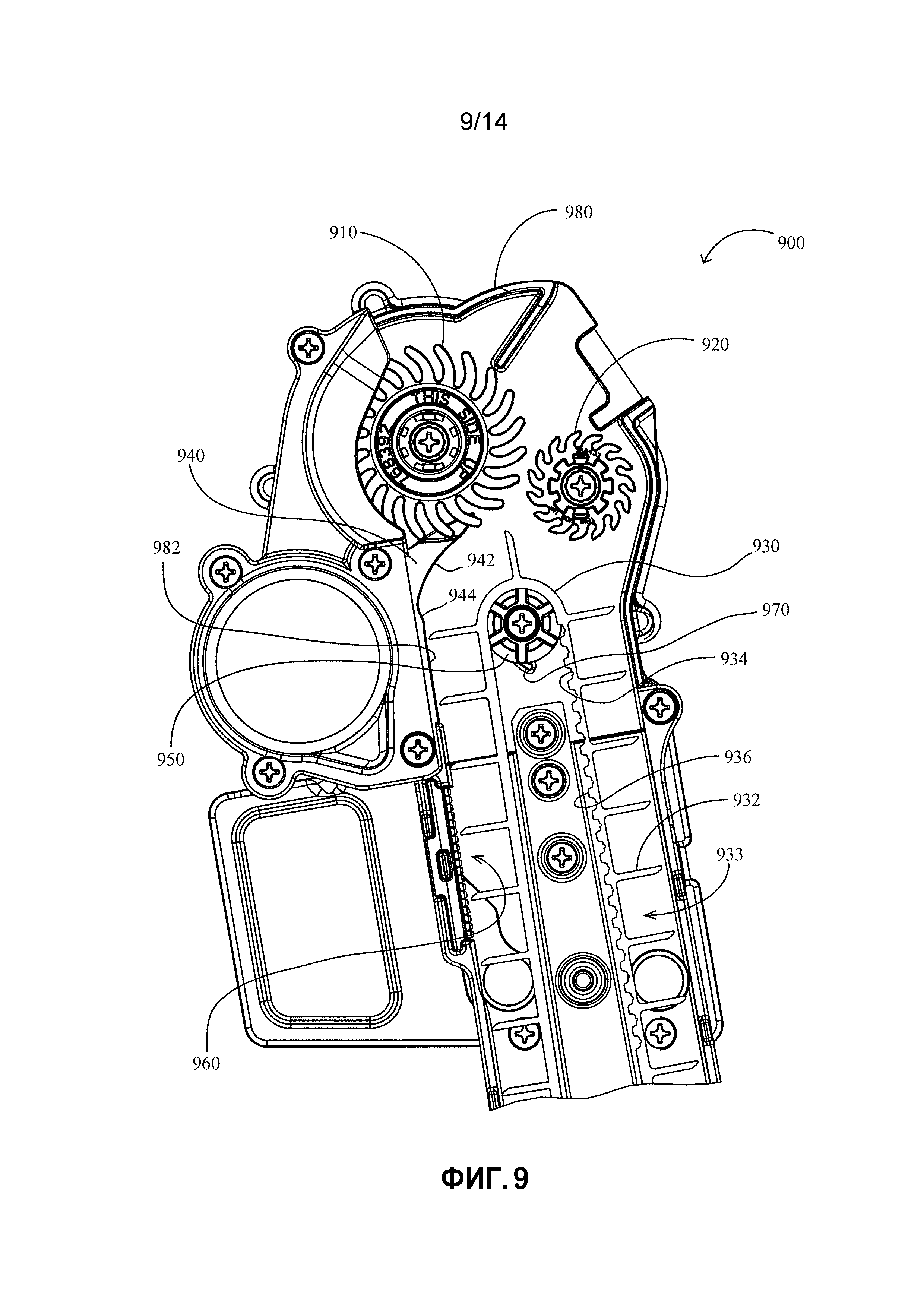
ФИГ. 9 представляет собой вертикальный вид сбоку еще одного варианта осуществления высевающего транспортера.
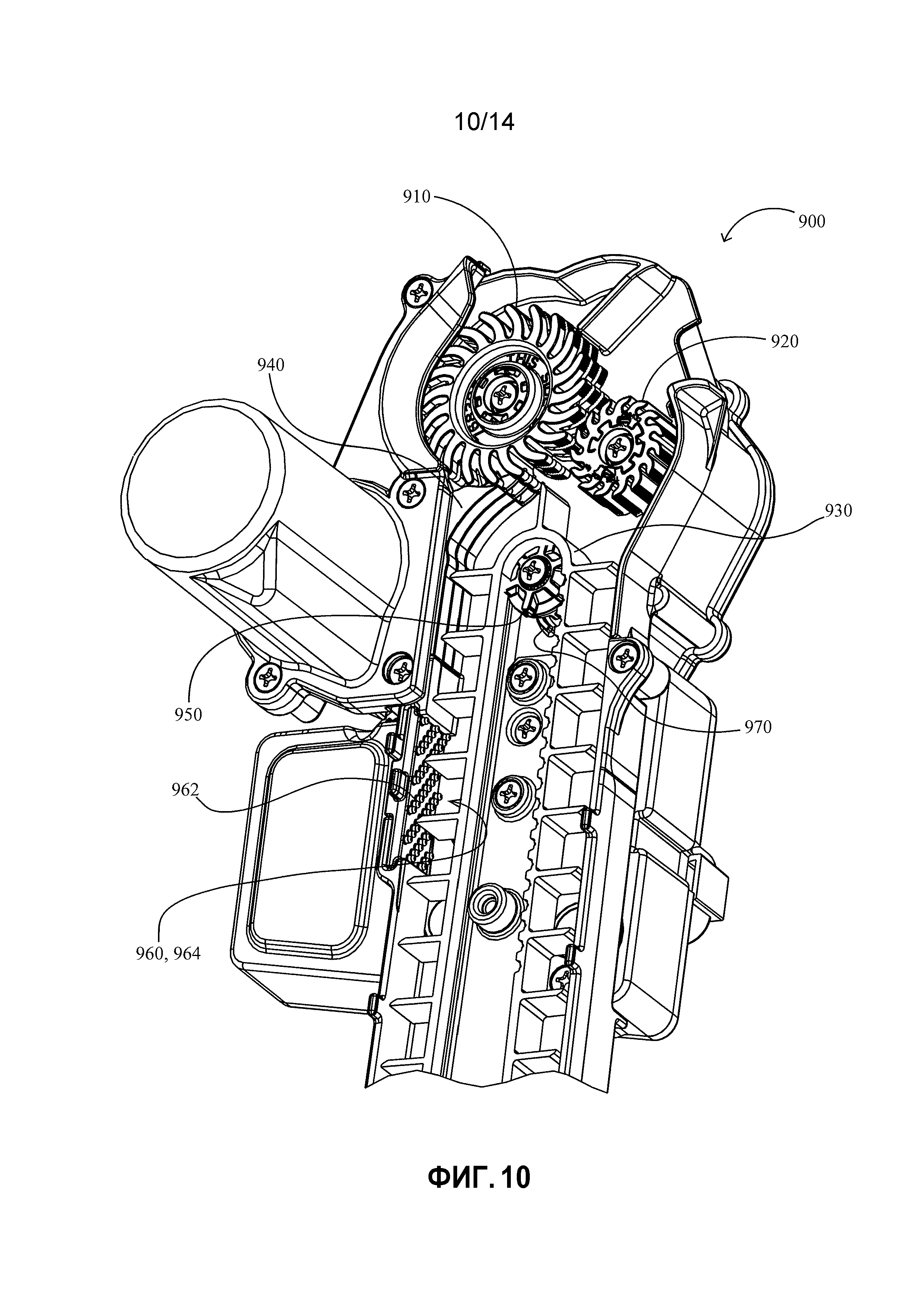
ФИГ. 10 представляет собой вид в перспективе высевающего транспортера фиг. 9.
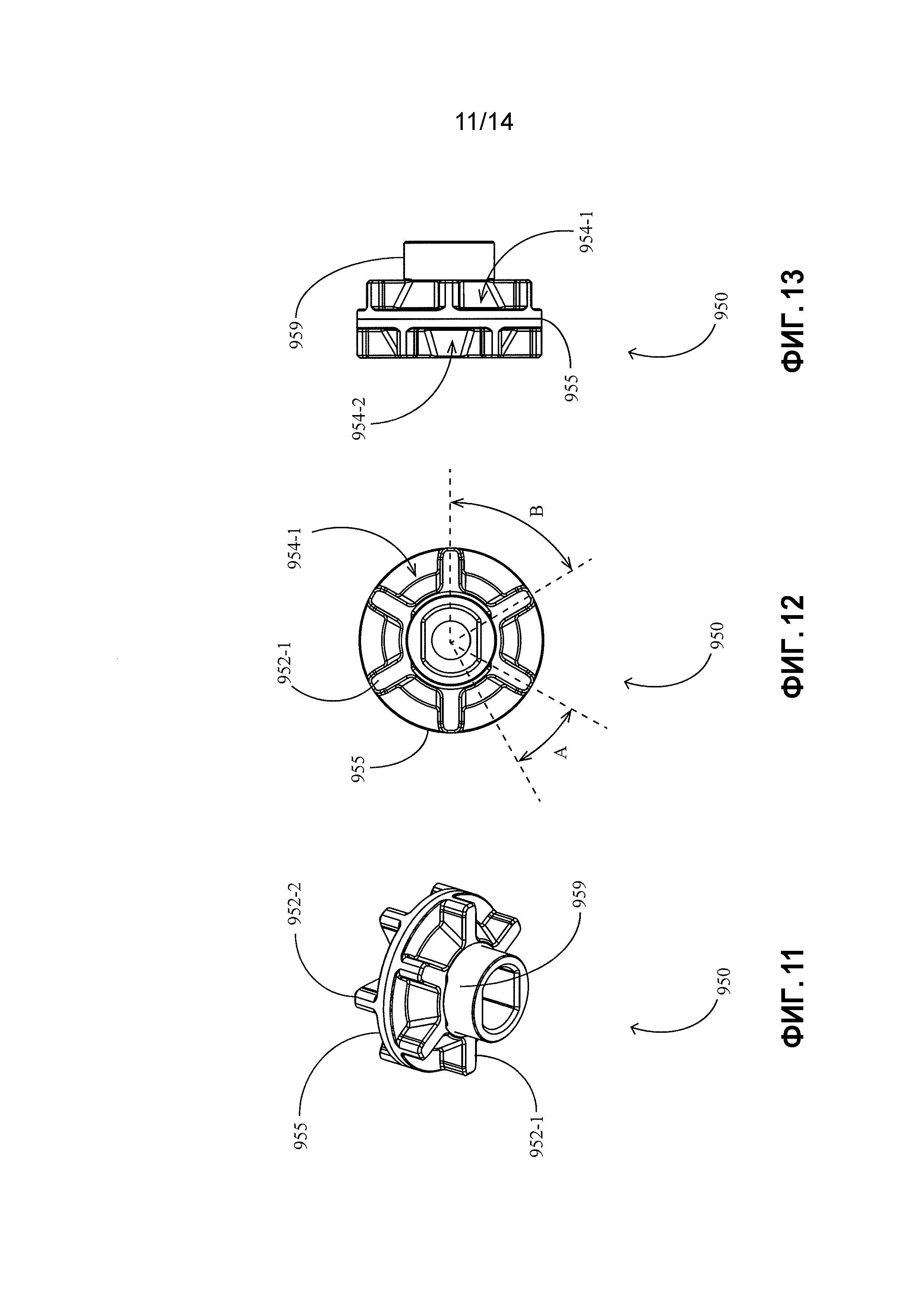
ФИГ. 11 представляет собой вид в перспективе варианта осуществления шкива.
ФИГ. 12 представляет собой вертикальный вид сбоку шкива фиг. 11.
ФИГ. 13 представляет собой вертикальный вид спереди шкива фиг. 11.
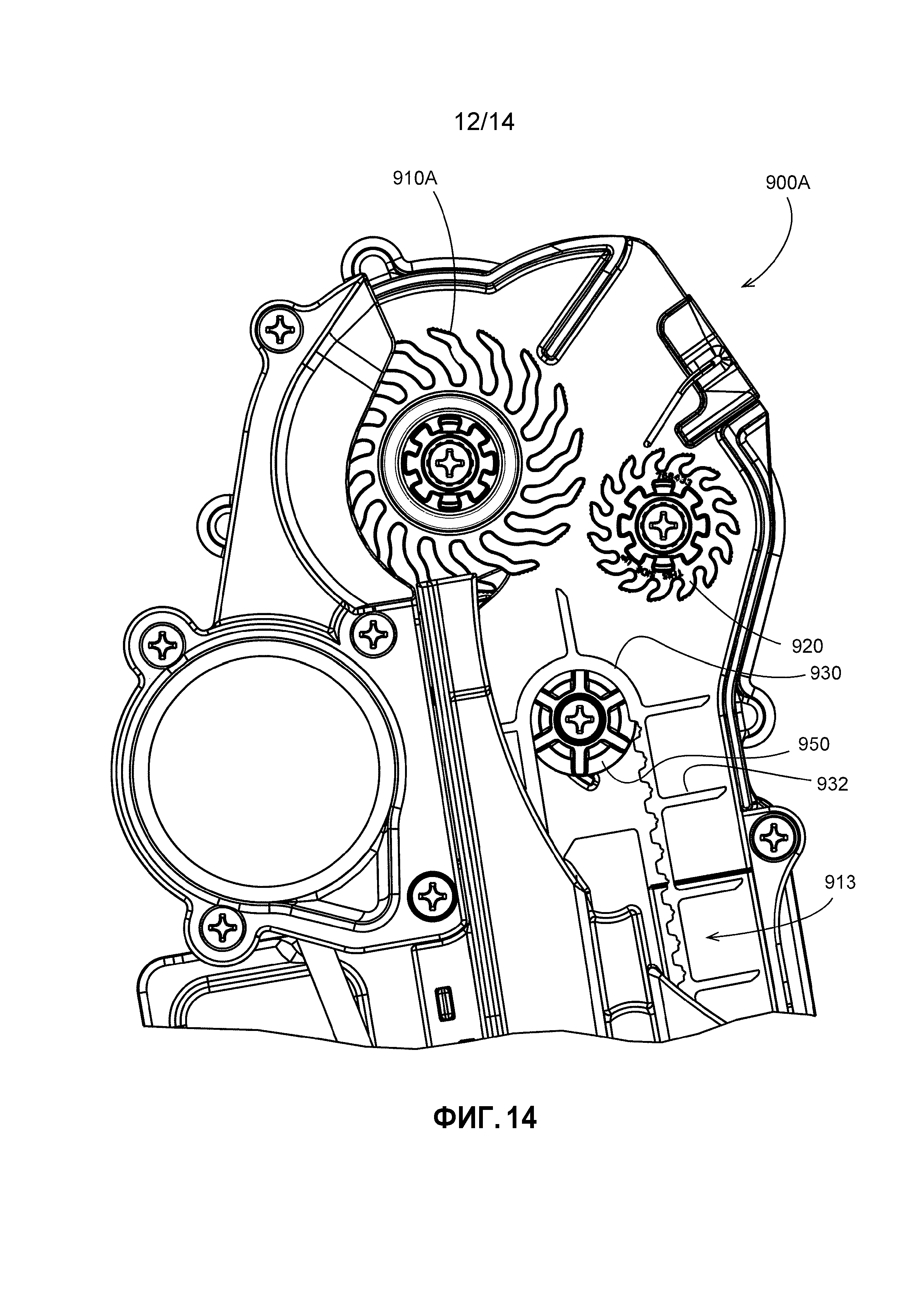
ФИГ. 14 представляет собой вертикальный вид сбоку еще одного варианта осуществления высевающего транспортера, показывающий альтернативный вариант осуществления подающего колеса с синусоидальными пальцами.
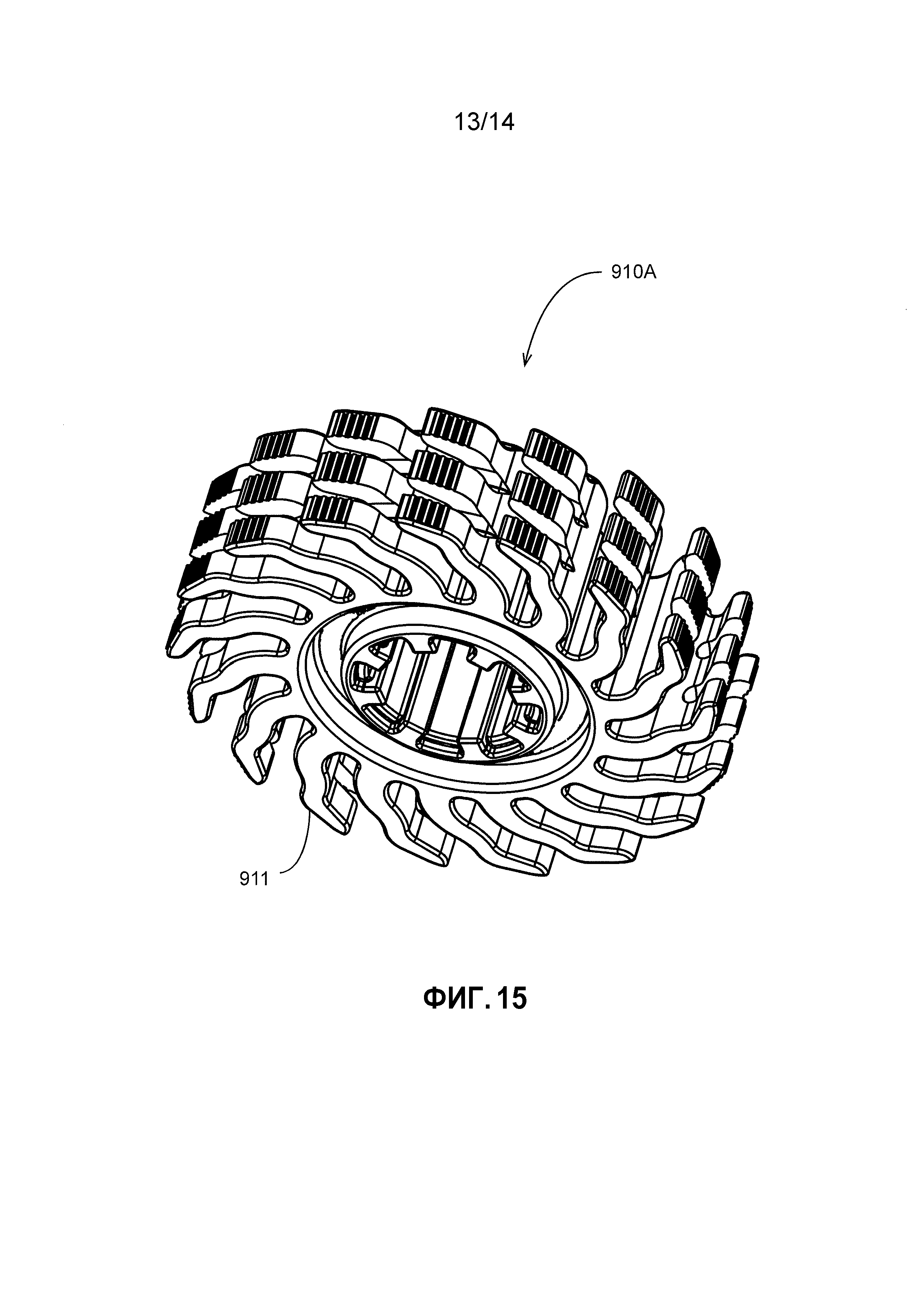
ФИГ. 15 представляет собой вид в перспективе подающего колеса с синусоидальными пальцами фиг. 14.
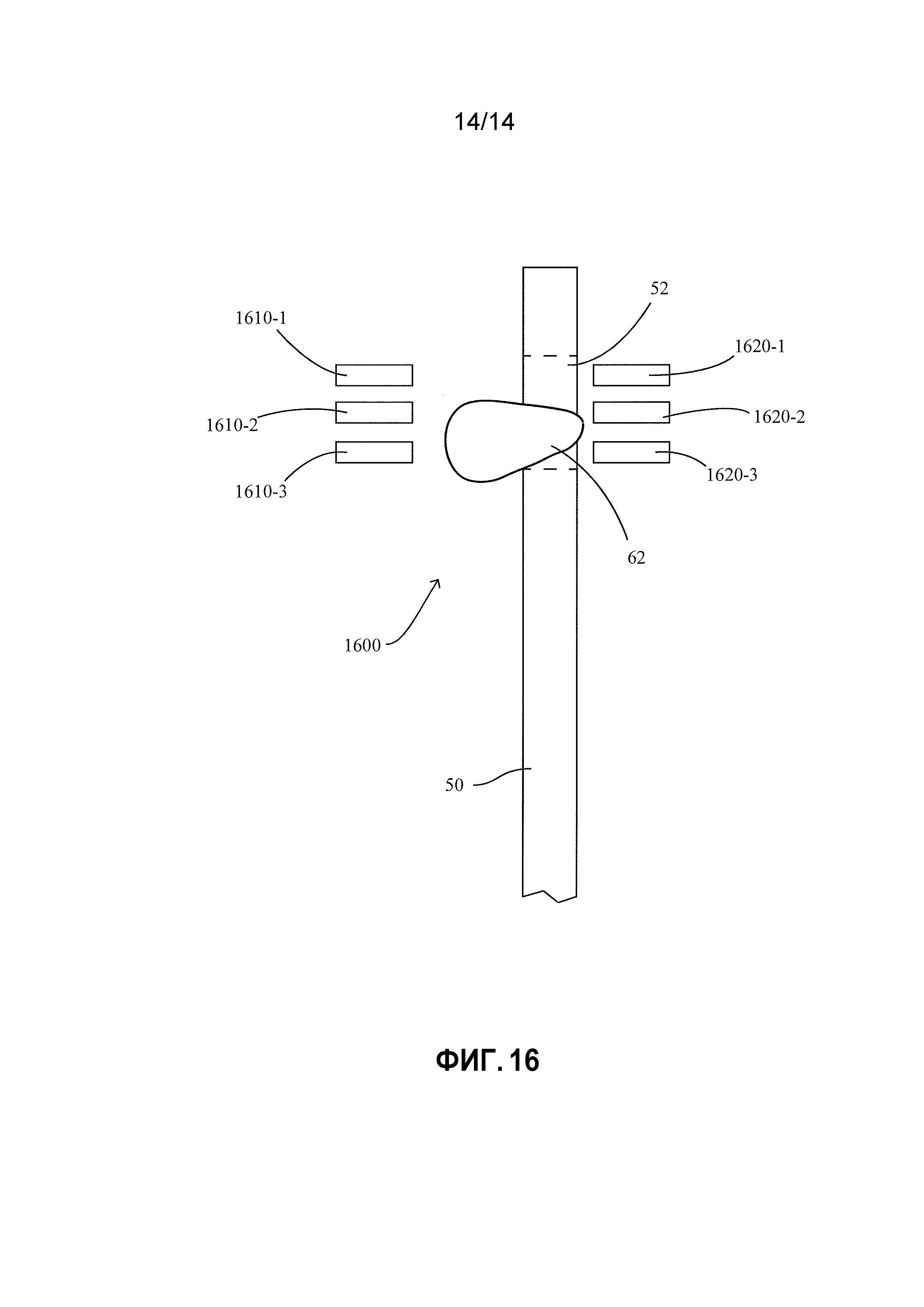
ФИГ. 16 представляет собой вид в вертикальном разрезе варианта осуществления датчика семян.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее со ссылкой на чертежи, на которых одинаковые ссылочные номера обозначают идентичные или соответствующие детали на нескольких изображениях, ФИГ. 1 иллюстрирует вертикальный вид сбоку одной высевающей секции 10 традиционной сеялки для пропашных культур, относящейся к типу, раскрытому в патенте США № 7,438,006, раскрытие которого включено настоящим в данный документ во всей полноте посредством ссылки. Как хорошо известно в данной области, высевающие секции 10 устанавливают с разнесением по длине поперечного бруса 12 для навешивания рабочих органов посредством параллелограммного навесного устройства 14, состоящего из верхнего и нижнего параллельных рычагов 16, 18, шарнирно установленных своими передними концами на поперечном брусе 12 для навешивания рабочих органов, а своим задним концом на раме 20 высевающей секции. Параллелограммное навесное устройство 14 позволяет каждой высевающей секции 10 двигаться вертикально независимо от бруса 12 для навешивания рабочих органов и других разнесенных высевающих секций с учетом изменений рельефа или камней или других препятствий, встречающихся высевающей секции, когда сеялку буксируют по полю.
Рама 20 высевающей секции функционально поддерживает бункер 23 для семян, который может быть выполнен с возможностью приема семян из бункера для насыпного материала (не показано), дозатор 26 семян и семяпровод 28, а также узел 30 нарезки семенной борозды или семенной канавки, и узел 40 заделки борозды или канавки. Узел 30 нарезки борозды содержит пару нарезающих борозду дисков 32 и пару копирующих колес 34. Копирующие колеса 34 шарнирно прикреплены к раме 20 высевающей секции посредством рычагов 36 копирующих колес. Между параллельными рычагами 16, 18 находится цилиндрическая пружина 49, предоставляющая дополнительное прижимное усилие, обеспечивая, чтобы нарезающие борозду диски 32 полностью проникали в почву на требуемую глубину, которую устанавливают посредством элемента регулировки глубины (не показано), и обеспечивая уплотнение почвы для надлежащего образования борозды. Вместо цилиндрической пружины дополнительное прижимное усилие может обеспечиваться исполнительными механизмами или другим подходящим средством, таким как раскрыто в патенте США № 6,389,999, Duello, полное раскрытие которого включено настоящим в данный документ посредством ссылки.
Во время работы, когда высевающую секцию 10 опускают в посевное положение, нарезающие диски 32 проникают в почву. В то же самое время почва заставляет копирующие колеса 34 поворачиваться вверх до тех пор, пока рычаги 36 копирующих колес не упрутся или не войдут в контакт с положением упора, установленным ранее посредством элемента регулировки глубины борозды (не показано), или до тех пор, пока между вертикальной нагрузкой высевающей секции и реакцией почвы не будет достигнуто равновесие статической нагрузки. Когда сеялку буксируют вперед в направлении, обозначенном стрелкой 39, нарезающие борозду диски нарезают в почве V-образную борозду или канавку 60 в то время, как копирующие колеса 34 уплотняют почву, способствуя образованию V-образной борозды. Отдельные семена 62 из бункера 23 для семян с равномерными интервалами распределяются дозатором 26 семян в верхнее отверстие в семяпроводе 28. Когда семена 62 падают через семяпровод 28, семена двигаются вниз и назад между нарезающими борозду дисками 32 на дно V-образной борозды 60. Затем заделывающий борозду узел 40 закрывает борозду 60 почвой и слегка уплотняет.
Должно быть понятно, что так как семена 62 свободно падают через семяпровод 28 в высевающей секции 10, описанной выше, траектория движения семян и скорость семян на выходе из семяпровода являются относительно свободными. Было бы предпочтительно ограничить траекторию движения семян 62 для того, чтобы уменьшить погрешности интервала между семенами; т.е. уменьшить размещение семян в поле с неравномерным интервалом. Кроме того, было бы предпочтительно отрегулировать скорость семян 62 так, чтобы при приземлении в борозде 60 семена имели пониженную горизонтальную скорость относительно земли.
На ФИГ. 2 проиллюстрирован высевающий транспортер 100. Высевающий транспортер 100 включает в себя ремень 140, расположенный вокруг верхнего и нижнего шкивов 152, 154, и предпочтительно приводится в движение верхним шкивом 152; в других вариантах осуществления высевающий транспортер может приводиться в движение нижним шкивом 154. Ремень 140 включает в себя пластины 142. Высевающий транспортер 100 дополнительно включает в себя направляющую поверхность 110, расположенную рядом с пластинами 142 с одной стороны высевающего транспортера. Высевающий транспортер 100 предпочтительно включает в себя опорную плиту 130, выполненную с возможностью сохранения положения ремня 140.
Во время работы высевающий транспортер 100 принимает семена 62 из высевающего диска 51 и перемещает их к выходу 164. Высевающий диск 51 предпочтительно помещается в дозаторе 26 семян по аналогии с диском, проиллюстрированным на ФИГ. 1, и вращается в направлении, обозначенном стрелкой 56, вокруг вала 54, установленного в дозаторе семян с возможностью вращения. Обращаясь к ФИГ. 3, дозатор 26 семян предпочтительно относится к вакуумному типу, который известен в данной области, так что источник разрежения (не показано) создает разрежение позади высевающего диска 51 (если смотреть на ФИГ. 3), создавая таким образом перепад давлений с разных сторон отверстий 52 в диске. Когда отверстия 52 вращаются мимо семенного пула в месте, обозначенном в общем ссылочным номером 58, перепад давлений вызывает захват отдельных семян 62 в каждом отверстии 52, так что диск переносит семена, как проиллюстрировано. Когда отверстия пересекают границу, такую как ось 196, предпочтительно в положении высевающего диска 51 приблизительно на 3 часа, источник разрежения по существу отсекается (напр., путем прекращения герметичного соединения, как известно в данной области), так что семена 62 высвобождаются из диска, когда они проходят ось 196. Семена 62 падают из диска предпочтительно по существу вертикально вдоль оси 192. Направляющая поверхность 110 включает в себя изогнутый участок 112, по которому каждое семя 62 скользит вниз и назад перед прохождением между двумя пластинами 142 на впуске для семян, обозначенном в целом ссылочным номером 162. Затем каждое семя 62 перемещается вниз по высевающему транспортеру 100.
Ремень 142 предпочтительно двигается со скоростью, пропорциональной скорости высевающей секции 10 относительно земли, обозначенной посредством ссылки «St» (ФИГ. 4). Например, в некоторых вариантах осуществления высевающий транспортер 100 движется так, чтобы линейная скорость ремня 142 в нижней части нижнего шкива 154 была приблизительно равна скорости St относительно земли.
Как проиллюстрировано на ФИГ. 3, каждое семя 62 сначала ускоряется вниз пластиной 142 над семенем. Обращаясь к ФИГ. 4, когда каждое семя 62 движется вниз по высевающему транспортеру 100, оно может падать с пластины 142 над ней. Однако, когда каждое семя 62 приближается к нижней части высевающего транспортера, пластины 142 ускоряются, проходя вокруг нижнего шкива 154, так что пластины 142 контактируют с семенами и придают семенам горизонтальную скорость назад. Кроме того, изогнутая часть 114 направляющей поверхности 110 направляет семена назад, придавая семенам горизонтальную скорость назад. Таким образом, когда семя 62 сходит с высевающего транспортера на выходе для семян, в целом обозначенном ссылочным номером 164, семя имеет направленную вниз вертикальную составляющую Vy скорости и горизонтальную составляющую Vx скорости, величина которой меньше чем скорость хода St высевающей секции 10. Должно быть понятно, что предпочтительной является меньшая горизонтальная составляющая Vx скорости, потому что семя 62 будет испытывать меньшее продольное качение, когда оно приземляется в борозде 60, что приводит к более равномерному размещению семян. Предпочтительно, чтобы изогнутая часть 114 находилась на 20 градусов ниже горизонтальной линии.
Возвращаясь к ФИГ. 3, должно быть понятно, что пластины 142 двигаются быстрее, когда они проходят вокруг верхнего конца верхнего шкива 152, напр., выше оси 194. Кроме того, выше оси 194 пластины 142 имеют существенную горизонтальную составляющую скорости. В результате попытка вводить семена 62 между пластинами выше оси 194 может приводить к выбиванию семян из ремня 140. Таким образом, предпочтительно, чтобы впуск 162 для семян, в который семена 62 проходят между пластинами 142, находился ниже оси 194. Этот результат предпочтительно достигается путем расположения оси 196, на которой семена высвобождаются из диска 51, ниже оси 194 и/или путем выполнения изогнутой части 112 направляющей поверхности так, чтобы семена 62 перед поступлением во впуск 162 проходили ниже оси 194.
Обращаясь к варианту осуществления ФИГ. 8, проиллюстрирован высевающий транспортер 100, взаимодействующий с высевающей секцией 10. Высевающая секция 10 включает в себя стойку 35. Высевающий транспортер 100 установлен на стойке 35 посредством крепежных держателей 106, 108.
Системы и Способы Управления Транспортером
На ФИГ. 5 схематично проиллюстрирована система 1000 управления для управления и мониторинга высевающего транспортера 100, а также любого другого варианта осуществления высевающего транспортера, раскрытого в данном документе. Система 1000 управления включает в себя устройство 1005 контроля за работой сеялки. Устройство 1005 контроля за работой сеялки предпочтительно включает в себя CPU и пользовательский интерфейс, и может представлять собой такое устройство контроля, которое раскрыто в патенте США заявителя № 8,078,367. Устройство 1005 контроля за работой сеялки предпочтительно имеет электрическую связь с двигателем 1020 высевающего транспортера. Двигатель 1020 высевающего транспортера функционально соединен с высевающим транспортером 100 для приведения высевающего транспортера в действие. Например, в некоторых вариантах осуществления двигатель 1020 высевающего транспортера включает в себя приводной выходной вал, механически соединенный с центральным валом верхнего шкива 154 или нижнего шкива 152. Высевающий транспортер 1020 предпочтительно включает в себя кодовый датчик (напр., датчик на эффекте Холла) для определения скорости движения транспортера 100. Устройство 1005 контроля за работой сеялки предпочтительно имеет электрическую связь с двигателем 27 привода дозатора. Двигатель 27 привода дозатора может представлять собой любое устройство, известное в данной области, для приведения в действие дозаторов семян с требуемой скоростью, например, гидравлический привод или электропривод. В виде примера, двигатель 27 привода дозатора может представлять собой электрический двигатель, установленный на или около дозатора 26 семян, причем электрический двигатель имеет выходной вал, функционально соединенный с валом 54 дозатора семян; в таком варианте осуществления для определения скорости вращения дозатора 50 двигатель 27 привода дозатора предпочтительно включает в себя кодовый датчик (напр., датчик на эффекте Холла). Устройство 1005 контроля за работой сеялки также предпочтительно имеет электрическую связь с источником 1010 скорости. Источник скорости может представлять собой систему GPS, радиолокационный датчик скорости или датчик частоты вращения колеса. Устройство контроля за работой сеялки может выбирать между несколькими источниками скорости путем прогноза надежности, как раскрыто в международной патентной публикации заявителя № WO2012/015,957, включенной в данный документ во всей полноте посредством ссылки.
Продолжая со ссылкой на ФИГ. 5, устройство контроля за работой сеялки предпочтительно имеет электрическую связь с одним или более датчиками семян, выполненными с возможностью установки на высевающем транспортере 100. Датчик семян может представлять собой один или более датчиков семян. Датчик семян также может быть электрически связан с двигателем 27 привода дозатора и двигателем 1020 высевающего транспортера.
ФИГ. 16 показывает вариант осуществления датчика 1600 семян, содержащего множество передатчиков 1610-1, 1610-2 и 1610-3, осуществляющих передачу для связанного с ними множества приемников 1620-1, 1620-2 и 1620-3. Для определения, имеется ли в отверстии 52 для семян семя 62, сигналы, получаемые множеством приемников, могут усредняться. В качестве альтернативы, можно измерять процентную светопроницаемость между каждой парой передатчика и приемника, затем на основании процентной светопроницаемости производить взвешивание, а затем взвешенные результаты можно усреднять. Это может быть полезно, когда семя ориентировано в отверстии 52 для семян так, что семя 62 в то же самое время не создает препятствие для всего множества передатчиков 1610-1, 1610-2 и 1610-3 и приемников 1620-1, 1620-2 и 1620-3. Наличие множества датчиков обеспечивает более хорошее определение наличия семени 62 в отверстии 52 для семян.
Обращаясь к ФИГ. 6, проиллюстрирован один вариант осуществления системы 1000 управления устройством контроля за работой сеялки. Система 1000 управления устройством контроля за работой сеялки ФИГ. 6 включает в себя датчик 550 семян, установленный на боковых стенках высевающего транспортера 100. Двигатель 27 привода дозатора в системе 1000 управления устройством контроля за работой сеялки ФИГ. 6 содержит электропривод. Скорость St высевающего транспортера 100 в целом направлена влево в перспективе ФИГ. 6 и имеет величину, которая изменяется со скоростью и направлением посевного орудия.
На ФИГ. 7 проиллюстрирован способ 1100 управления скоростью движения высевающего транспортера 100. В блоке 1102 устройство 1005 контроля за работой сеялки получает от источника 1010 скорости скорость посевного орудия. В блоке 1103 устройство 1005 контроля за работой сеялки предпочтительно получает из памяти, заключенной в устройстве 1005 контроля за работой сеялки, текущую команду плотности посева (т.е. требуемое число посева семян на акр). В блоке 1105 устройство 1005 контроля за работой сеялки предпочтительно подает команду скорости вращения дозатора 50 на основании требуемой плотности посева и текущей скорости орудия.
Продолжая со ссылкой на ФИГ. 7, в блоке 1110 устройство 1005 контроля за работой сеялки предпочтительно определяет рабочую скорость высевающего транспортера 100. Эта стадия может выполняться с использованием датчика на эффекте Холла или другого датчика, выполненного с возможностью измерения числа оборотов электрического двигателя или частоты вращения ведущего вала высевающего транспортера 100. Эта стадия также может выполняться путем измерения времени между прохождением пластинами 142 датчика 550 семян. В свете настоящего раскрытия следует понимать, что стадия блока 1110 не требует измерения фактической рабочей скорости, но может включать измерение показателя, связанного с рабочей скоростью.
Продолжая со ссылкой на ФИГ. 7, в блоке 1500 устройство 1005 контроля за работой сеялки предпочтительно определяет скорость St высевающего транспортера 100 относительно земли. В некоторых вариантах осуществления эта стадия может выполняться путем допущения, что скорость трактора или орудия, переданная источником 1010 скорости, равна скорости St высевающего транспортера 100 относительно земли. Такой способ является точным, когда трактор и брус 12 для навешивания рабочих органов не поворачивают, но становится неточным при повороте трактора и бруса 12 для навешивания рабочих органов. В других вариантах осуществления стадия блока 1500 может выполняться более точно за счет определения локальной скорости St каждого транспортера 100 относительно земли вдоль бруса 12 для навешивания рабочих органов. Такие варианты осуществления описаны в данном документе в разделе, озаглавленном «Определение Скорости Транспортера Относительно Земли».
Продолжая со ссылкой на ФИГ. 7 и способ 1100, в блоке 1117 устройство 1005 контроля за работой сеялки предпочтительно определяет команду частоты оборотов двигателя транспортера, напр., используя калибровочную кривую. Калибровочная кривая предпочтительно связывает скорость St относительно земли с требуемой рабочей скоростью So. В свете настоящего раскрытия следует учитывать, что калибровочная кривая также может связывать показатель, относящийся к скорости относительно земли (например, измеренное напряжение или полученное в команде напряжение) с показателем, относящимся к требуемой скорости транспортера (например, измеренным напряжением или полученным в команде напряжением).
Продолжая со ссылкой на ФИГ. 7 и способ 1100, в блоке 1120 устройство 1005 контроля за работой сеялки предпочтительно подает команду новой требуемой скорости транспортера. В свете настоящего раскрытия следует учитывать, что изменение команды скорости транспортера может откладываться до тех пор, пока фактическая скорость транспортера не выйдет за пределы предпочтительного диапазона, напр. 5%, относительно требуемой скорости транспортера.
Обращаясь к ФИГ. 9-10, проиллюстрирован еще один вариант осуществления узла 900 транспортировки семян. Как и в вариантах осуществления подающего транспортера, раскрытых в международной патентной публикации заявителя № WO2013/049198, включенной настоящим в данный документ посредством ссылки во всей полноте, подающие колеса 910, 920 двигаются в противоположных направлениях для того, чтобы захватывать семена из высевающего диска дозатора семян и выбрасывать семена между пластинами 932 транспортера 930 (напр., кругового транспортера), помещенного внутри корпуса 980. В проиллюстрированном варианте осуществления транспортер 930 содержит ремень с пластинами, как проиллюстрировано на ФИГ. 9-10. В других вариантах осуществления транспортер 930 может иметь другую конструкцию, подходящую для перемещения семян из верхнего в нижнее положение, например, ремень с щетками, имеющий множество щетинок для приема семян.
ФИГ. 9 и 10 также иллюстрируют верхний шкив 950, вокруг которого во время работы двигается транспортер 930. Рядом с верхним шкивом 950 (напр., непосредственно рядом в осевом направлении) предпочтительно расположена чистящая планка 970. Чистящая планка 970 предпочтительно продолжается радиально наружу от шкива 950. Чистящая планка 970 предпочтительно является дугообразной. Чистящая планка 970 предпочтительно продолжается по дуге вперед в направлении вращения шкива 950 (напр., против часовой стрелки на изображении ФИГ. 9). Верхний конец чистящей планки 970 предпочтительно находится рядом с радиально наружной поверхностью ступицы 959 (ФИГ. 11) шкива 950. Во время работы когда шкив вращается рядом с чистящей планкой 970 грязь или другой мусор предпочтительно соскребается со шкива 950 при контакте с чистящей планкой 970.
Продолжая со ссылкой на ФИГ. 9-10, проиллюстрирована встряхивающая планка 960. Встряхивающая планка 960 предпочтительно по существу параллельна внутренней стенке 982 корпуса 980 (и предпочтительно находится по существу на одном уровне с ней). Встряхивающая планка 960 предпочтительно включает в себя множество встряхивающих элементов 962, которые могут быть расположены рядами 964 (напр., диагонально ориентированными рядами, как проиллюстрировано на ФИГ. 10). Встряхивающая планка 960 предпочтительно расположена рядом с частью транспортера 930, в которой перемещаются семена, напр., между местом входа, в котором семена вводятся подающими колесами 910, 920, и местом высвобождения, в котором семена высвобождаются из транспортера в посевную борозду. Встряхивающая планка 960 предпочтительно расположена рядом с частью транспортера 930, в которой семена перемещаются перед обнаружением датчиком семян, напр., между местом входа, в котором семена вводятся подающими колесами 910, 920, и местом определения, в котором семена обнаруживаются датчиком семян. Встряхивающие элементы 962 предпочтительно продолжаются в сторону транспортера 930. Дистальный конец каждого встряхивающего элемента 962 предпочтительно находится непосредственно рядом с дистальным концом проходящих пластин 932.
Во время работы семена могут время от времени улавливаться между дистальным концом пластины 932 и внутренней стенкой 982 корпуса 980 после введения в транспортер 930. Когда захваченные семена проходят вдоль внутренней стенки 982, захваченные семена предпочтительно двигаются в направлении и поперек поверхности встряхивающей планки 960. При возникновении контакта с встряхивающими элементами встряхивающей планки 960, захваченные семена предпочтительно встряхиваются (напр., вибрируют, двигаются) и меняют положение между пластинами 932 и внутренней стенкой 982. После смены положения между пластиной и внутренней стенкой, направленное частично вертикально вверх усилие между семенем и одним или более встряхивающими элементами предпочтительно направляет семя в один из зазоров 933 между пластинами транспортера 930, предпочтительно в зазор между пластинами прямо вертикально над пластиной, которая захватила семя.
Встряхивающая планка 960 предпочтительно содержит упругий материал (напр., резину, полиуретан). Предпочтительно, чтобы встряхивающую планку 960 можно было снять, предпочтительно без использования инструментов. Встряхивающая планка 960 может быть заменена на одну из множества сменных встряхивающих планок. Каждая сменная встряхивающая планка может отличаться от другой сменной встряхивающей планки одним или более следующими показателями: (1) высота встряхивающих элементов, (2) форма встряхивающих элементов, (3) количество встряхивающих элементов, (4) конфигурация (напр., схема) встряхивающих элементов или (5) тип или свойства материала (напр., упругость).
Со ссылкой на ФИГ. 9-10, проиллюстрирована направляющая 940 семян, имеющая рельефный участок 942 и участок 944 ввода. Рельефный участок 942 предпочтительно расположен радиально дальше от шкива 950 (и предпочтительно дальше от транспортера 930) чем участок 944 ввода. Рельефный участок 942 предпочтительно изогнут и предпочтительно дугообразно проходит по траектории по существу параллельной траектории пластины 932, проходящей рельефный участок во время работы транспортера 930. Во время работы семена могут скользить по рельефному участку 942 перед контактом с участком 944 ввода. При контакте с участком 944 ввода семена предпочтительно переводятся (напр., подталкиваются, направляются, поджимаются) в направлении к транспортеру 930 и предпочтительно вводятся в зазор 933 между пластинами посредством контакта с участком 944 ввода.
Со ссылкой на ФИГ. 9-13, проиллюстрирован усовершенствованный верхний шкив 950, взаимодействующий с транспортером 930 для приведения в действие транспортер во время работы. Шкив 950 предпочтительно включает в себя первый набор радиально расположенных зубьев 952-1 шкива и второй набор радиально расположенных зубьев 952-2 шкива. Зубья 952-1 шкива предпочтительно разделены шаговым углом B (напр., 60 градусов). Зубья 952-2 шкива предпочтительно разделены таким же шаговым углом B (напр., 60 градусов). Первый набор ведущих зубьев 952-1 и второй набор ведущих зубьев 952-2 предпочтительно смещены друг от друга на угловое смещение A. Угловое смещение A предпочтительно составляет половину углового расстояния B (напр., 30 градусов). Первый и второй наборы зубьев шкива предпочтительно смещены в боковом направлении за счет обода 958.
Во время работы зубья шкива 952 предпочтительно зацепляют зазоры 934 ремня, расположенные между зубьями 936 ремня с приведением транспортера 930 в движение вокруг шкива 950. Зазоры 934 ремня предпочтительно разнесены так, что последовательные зазоры 934 ремня вдоль транспортера 930 поочередно зацепляются зубьями 952-1 и 952-2 шкива. Например, в одном варианте осуществления во время работы в хронологическом порядке могут проходить следующие стадии: первый зазор 934 ремня зацепляется первым зубом шкива набора 952-1 зубьев шкива, затем второй зазор 934 ремня (напр., следующий зазор ремня после первого зазора ремня) зацепляется первым зубом шкива набора 952-2 зубьев шкива, затем третий зазор 934 ремня (напр., следующий зазор ремня после второго зазора ремня) зацепляется вторым зубом шкива набора 952-1 зубьев шкива, затем четвертый зазор 934 ремня (напр., следующий зазор ремня после третьего зазора ремня) зацепляется вторым зубом шкива набора 952-2 зубьев шкива и так далее. Во время работы зазоры 954-1 и 954-2 шкива между двумя наборами зубьев 952-1, 952-2 шкива поочередно зацепляются аналогичным образом (напр., зацепляются без приведения в движение) зубьями 936 ремня. Во время работы обод 958 предпочтительно частично находится в продольном пазу (не показано), предоставленном вдоль внутренней стороны транспортера 930 в боковом направлении от центрального положения по длине транспортера. Должно быть понятно, что хотя схема зубьев 936 ремня и зазоров 934 ремня проиллюстрированы только вдоль правой стороны транспортера 930 (см. ФИГ. 9), в предпочтительных вариантах осуществления эта схема продолжается по длине транспортера.
ФИГ. 14 представляет собой вертикальный вид сбоку еще одного варианта осуществления высевающего транспортера 900A, который по существу такой же, как в предыдущем варианте осуществления высевающего транспортера 900, показанном на ФИГ. 9, за исключением того, что в варианте осуществления ФИГ. 14 в высевающем транспортере 900A задействовано подающее колесо 910A, имеющее пальцы 911 с синусоидальной формой, как лучше всего показано на ФИГ. 15. Синусоидальная форма пальцев 911 обеспечивает большее сдавливание пальцев 911, когда семена имеют больший размер, делая за счет этого минимальным возможное заедание подающего колеса 900A.
Вышеизложенное раскрытие является иллюстративным и не предназначено считаться исчерпывающим или ограниченным вариантами осуществления, системами и способами, описанными в данном документе. Рядовым специалистам в данной области будут очевидны многочисленные модификации и варианты без выхода за пределы представленных идей. Предполагается, что вышеизложенное раскрытие, содержащее формулу изобретения, должно интерпретироваться таким образом, чтобы охватывать все такие варианты и модификации.
Реферат
Устройство доставки семян содержит дозатор семян и узел перемещения семян. Дозатор семян выполнен с возможностью захвата семян на высевающем диске и с возможностью высвобождения указанных захваченных семян в месте высвобождения семян. Узел перемещения имеет верхний конец, выполненный с возможностью приема высвобождающихся семян. Узел перемещения семян включает в себя высевающий транспортер. Последний имеет внутреннюю поверхность и наружную поверхность. Указанная внутренняя поверхность имеет множество выступающих внутрь разнесенных зубьев, образующих последовательные зазоры ремня. Указанная наружная поверхность имеет множество выступающих наружу разнесенных пластин, образующих последовательные зазоры между пластинами, которые принимают высвобождающиеся семена. Верхний шкив высевающего транспортера имеет первый набор радиально расположенных зубьев шкива и второй набор радиально расположенных зубьев шкива, смещенных в угловом направлении от указанного первого набора радиально расположенных зубьев шкива. При этом каждый из указанных первого и второго набора радиально расположенных зубьев шкива поочередно зацепляет указанные последовательные зазоры ремня. Рядом с указанным верхним шкивом расположена чистящая планка для очистки мусора из указанного верхнего шкива. Использование изобретения позволит повысить точность размещения семян. 12 з.п. ф-лы, 16 ил.
Формула
Документы, цитированные в отчёте о поиске
Сеялка с высевающей системой
Комментарии