Катушка для проволоки - RU2550458C2
Код документа: RU2550458C2
Чертежи



































Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к машине для обвязки арматуры, которая подает проволоку с катушки, обматывает проволоку вокруг арматурных стержней в форме петли, а затем скручивает и связывает проволоку, к катушке для проволоки, прикрепленной к корпусу машины для обвязки арматуры и имеющей средство отображения информации, относящейся к типу катушки для проволоки и т.п., и способу определения информации о вращении по области для определения информации катушки для проволоки.
Уровень техники
В обычной машине для обвязки арматуры, катушка, на которую намотана проволока для обвязки арматуры, установлена в задней части машины. При включении выключателя и нажатии на крючок, проволока вытягивается подающими шестернями устройства подачи проволоки и подается вперед. Проволока изгибается в форме петли изогнутым участком направляющей и обматывается вокруг арматурного стержня, а затем часть петли зажимается и скручивается, поворачиваясь скручивающим крюком, в результате чего арматурные стержни обвязываются. В машине для обвязки арматуры имеется устройство, автоматически регулирующее крутящий момент, в котором боковая поверхность катушки для проволоки снабжена средством отображения, на котором отображается тип проволоки, при этом средство отображения обнаруживается средством обнаружения, предусмотренным в машине для обвязки арматуры, при этом тип проволоки определяется на основании информации, полученной средством обнаружения, и крутящий момент автоматически регулируется (например, см. JP-A-2005-1914847).
За счет придания части катушки для проволоки выпуклой формы, и обнаруживая эту выпуклую форму датчиком контактного типа, установленным в корпусе машины для обвязки арматуры, это устройство определяет абсолютную величину вращения катушки для проволоки. Кроме того, помимо этого, часть черного углубления выполненного на боковой поверхности катушки для проволоки снабжена белыми выступами, и в машине также обнаруживают вращение катушки посредством светопринимающего элемента, обнаруживающего отражение. Задав интервал сигнала двух датчиков на 90°, определяют количество белых выступов на один оборот катушки для проволоки, а управление подачей и крутящим моментом осуществляется в соответствии с типом используемой проволоки.
Однако, при использовании для обнаружения вращения светопринимающего элемента, обнаруживающего отражение, возникают следующие проблемы:
1) Нижняя поверхность черного углубления катушки для проволоки не является плоской. Имеются несколько ступенчатых участков. Соответственно, в процессе обнаружения белых выступов, светопринимающий элемент, в соответствии со своими характеристиками, может также обнаруживать любые перепады высот. Соответственно, как показано линией 70 на фиг.28, происходит ошибочное обнаружение, поскольку выходные сигналы светопринимающего элемента изменяются, напряжение не возвращается к исходному значению, и при попадании песка или пыли часто возникают случаи ошибочного обнаружения.
2) Чувствительность светопринимающего элемента изменяется, и, хотя это учитывается, площадь белых выступов нужно увеличить, чтобы светопринимающий элемент надежно включался и выключался. Поэтому, на форму катушки наложены серьезные ограничения и возникают трудности с увеличением разрешающей способности. Кроме того, поскольку количество белых выступов также ограничено, количество закодированной информации ограничено.
3) В обычном светопринимающем элементе, как показано линией 71 на фиг.28, интервал между сигналами равен 90°. Поэтому сектора, в которых невозможно определить вращение катушки сразу после его начала или непосредственно перед его прекращением, также соответственно равны 90°. Поэтому на одну обвязку возникает ошибка в обнаружении вращения, равная максимум 180°. Эта ошибка становится ошибкой определения величины подачи, равной приблизительно 50 мм даже на последнем этапе вращения катушки, когда можно определить точную величину подачи проволоки. В то же время, когда величина подачи становится на 40 мм короче заданной величины, легко происходит раскручивание связки. Соответственно, при выполнении коррекции величины подачи по величине вращения катушки для проволоки требуется разрешение, при котором обнаруживается уменьшение величины подачи по меньшей мере 40 мм. Соответственно, при существующих датчиках точное определение вращения катушки для проволоки во время подачи проволоки невозможно, и уменьшение величины подачи, вызванное износом подающих шестерен, обнаружить нельзя.
Краткое описание изобретения
Первой целью настоящего изобретения является создание машины для обвязки арматуры, выполненной с возможностью определения типа проволоки или величины подачи проволоки, используя катушку для проволоки.
Дополнительно, второй целью настоящего изобретения является создание катушки для машины для обвязки арматуры, способной устранить ошибки обнаружения на основании перепада высот и т.п., в которой светопринимающий элемент может получать достаточно света, даже если света мало, при этом катушка способна увеличить разрешающую способность датчика.
Кроме того, третьей целью настоящего изобретения является создание способа определения информации о вращении, например, о величине вращения катушки для проволоки или о типе проволоки.
Для достижения вышеописанной первой цели согласно одному или более из вариантов настоящего изобретения предлагается машина 1 для обвязки арматуры, содержащая: корпус 2 машины для обвязки арматуры, камеру 3, выполненную в корпусе 2, катушку 4 для проволоки, установленную в камере 3, передающий фотодатчик 26, имеющий светоизлучающий элемент 27 на одной из двух боковых стенок 23, 24 камеры 3, и светопринимающий элемент 28 на другой из двух боковых стенок 23, 24 камеры 3; множество светопропускающих участков 64а, 64b, 64c, 64d, 64e, выполненных на катушке 4 для пропускания света, излучаемого светоизлучающим элементом 27; и контур 100 управления для определения информации о вращении катушки 4 для проволоки в соответствии с количеством светопропускающих участков 64а, 64b, 64c, 64d, 64e, обнаруженных светопринимающим элементом 26 во время вращения катушки 4.
В вышеописанной конфигурации имеется передающий фотодатчик, имеющий светоизлучающий элемент, расположенный на одной из двух боковых стенок камеры машины для обвязки арматуры, и светопринимающий элемент, расположенный на другой из двух боковых стенок камеры, при этом в катушке для проволоки выполнено множество светопропускающих участков, которые пропускают свет, излученный светоизлучающим элементом, а также имеется контур управления для определения информации о вращении катушки в соответствии с количеством светопропускающих участков, обнаруженных светопринимающим элементом во время вращения катушки. Таким образом, поскольку свет, генерируемый светоизлучающим элементом, проходит через светопропускающие участки, выполненные в катушке, и обнаруживается светопринимающим элементом, обнаружение не зависит от неровностей поверхности катушки и точность информации о вращении повышается.
Кроме того, поскольку свет, генерируемый светоизлучающим элементом, обнаруживается непосредственно светопринимающим элементом, этот светопринимающий элемент получает достаточное количество света, даже если площадь обнаружения меньше, чем у отражающего фотодатчика, и разрешающую способность датчика можно повысить.
Более того, поскольку разрешающая способность датчика повышается, точность определения величины подачи проволоки, пересчитанной из величины вращения катушки, также повышается и позволяет обнаружить уменьшение величины подачи.
В машине для обвязки арматуры катушка 4 может содержать множество областей S1, S2 для определения информации, обнаруживаемых передающим фотодатчиком 26, при этом количество светопропускающих участков 64а, 64b, 64c, 64d, 64e, выполненных на одной из областей S1, S2 для определения информации, может отличаться от количества светопропускающих участков 64а, 64b, 64c, 64d, 64e, выполненных на другой из областей S1, S2 для определения информации.
В вышеописанной конфигурации катушка для проволоки выполнена с областью для определения информации, с которой передающий фотодатчик считывает информацию, и эта область для определения информации разделена на две или более областей, при этом светопропускающие участки выполнены в двух или более областях для определения информации в количествах, отличающихся друг от друга. Поэтому, в соответствии с количеством светопропускающих участков только за счет вращения катушки можно получать два или более вида информации о вращении.
В машине для обвязки арматуры расстояние между одним из светоизлучающего элемента 27 и светопринимающего элемента 28 и осевым центром Р катушки 4 может быть меньше, чем расстояние между другим из светоизлучающего элемента 27 и светопринимающего элемента 28 и осевым центром Р катушки 4.
В вышеописанной конфигурации один из светоизлучающего элемента и светопринимающего элемента расположен ближе к осевом центру катушки, чем другой из этих элементов. Поэтому, отсутствует необходимость в обязательном расположении оптической оси светоизлучающего элемента параллельно осевому центру катушки. Таким образом, возрастает степень свободы конструкции.
Для достижения вышеуказанной второй цели согласно одному или более из вариантов настоящего изобретения катушка 4 для проволоки содержит: цилиндрический участок 43 втулки, на который намотана проволока, пару параллельных фланцев, 44, 45, проходящих наружу от обоих радиально внешних осевых концов участка 43 втулки; боковую стенку 60, расположенную радиально внутри участка 43 втулки и пересекающуюся с осевым направлением катушки, и множество светопропускающих участков 64, 64а, 64b, 64c, 64d, 64e, расположенных на боковой стенке 60.
В вышеописанной конфигурации катушка для проволоки съемно установлена в камере корпуса машины для обвязки арматуры. Катушка содержит цилиндрический участок втулки, на который намотана проволока, и пару параллельных фланцев, проходящих наружу от обоих внешних периферийных концов участка втулки. Боковая стенка внутри втулки используется в качестве области для определения информации, и эта область образована множеством светопропускающих участков, которые позволяют свету от передающего фотодатчика, расположенного в корпусе машины, проходить через них. Поэтому, на областях для определения информации можно разместить информацию разного содержания, например, информацию, позволяющую измерить величину вращения катушки по набору светопропускающих участков, и информацию о типе катушки.
В катушке каждый из светопропускающих участков 64, 64а, 64b, 64c, 64d, 64e может иметь поперечное сечение, параллельное осевому направлению, в котором одна сторона в осевом направлении уже, чем другая сторона в осевом направлении. Кроме того, каждый из светопропускающих участков (64, 64а, 64b, 64c, 64d, 64e) может иметь отверстие в одной стороне в осевом направлении и отверстие в другой стороне в осевом направлении, при этом площадь отверстия на одной стороне меньше площади отверстия на другой стороне.
В вышеописанной конфигурации сечение светопропускающих участков выполнено так, чтобы сужаться к стороне светоизлучающего элемента передающего фотодатчика, и расширяться к стороне светопринимающего элемента. Поэтому, поскольку свет от светоизлучающего элемента почти не отражается внутренними поверхностями светопропускающих участков, и свет, прошедший через светопропускающие участки, достигает светопринимающего элемента, не слишком сильно рассеиваясь, возникновение ошибок обнаружения маловероятно.
В катушке для проволоки расстояние в осевом направлении от боковой стенки 60 до одного из осевых концов участка 43 втулки в осевом направлении может быть больше, чем расстояние от боковой стенки 60 до другого осевого конца участка 43 втулки.
В катушке каждый из светопропускающих участков 64, 64а, 64b, 64c, 64d, 64e может иметь форму щелевидного длинного отверстия удлиненного в радиальном направлении.
В вышеописанной конфигурации светопропускающие участки выполнены в виде длинных щелевидных отверстий, удлиненных в радиальном направлении катушки. Поэтому, обнаружение может осуществляться, даже если оси светопринимающего элемента и светоизлучающего элемента подвергаются вибрациям и т.п. при работе, и не точно совпадают друг с другом. В частности, можно эффективно компенсировать радиальные отклонения оптической оси, направленной от светоизлучающего элемента к светопринимающему элементу.
Более того, светоизлучающий элемент и светопринимающий элемент, в связи с ограничениями на расположение, не могут не располагаться в положении, в котором оптическая ось отклоняется от осевого центра катушки и становится непараллельной. Кроме того, существует вероятность того, что оптическая ось света, излучаемого светоизлучающим элементом, может отклониться в направлении вращения или в радиальном направлении катушки даже во время вращения катушки. Однако, поскольку участки, пропускающие свет от светоизлучающего элемента, имеют форму щелей, удлиненных в радиальном направлении катушки, такое радиальное отклонение оптической оси, направленной от светоизлучающего элемента к светопринимающему элементу, допустимо.
В катушке каждый светопропускающий участок 64, 64а, 64b, 64c, 64d, 64e может быть образован установкой в каждом отверстии 72, выполненным в катушке 4, светопропускающего материала 73.
В вышеописанной конфигурации светопропускающие участки образованы путем установки в отверстиях, выполненных в катушке, светопропускающего материала. Следовательно, внутренняя часть катушки может быть защищена и общая ее прочность уменьшается незначительно.
Катушка дополнительно может содержать внутреннюю трубку 40, расположенную соосно внутри участка 43 втулки, где боковая стенка 60 образована между участком 43 втулки и внутренней трубкой 40.
Катушка для проволоки может быть выполнена с возможностью установки в камеру 3 корпуса 2 машины 1 для обвязки арматуры. Светопропускающие участки 64, 64а, 64b, 64c, 64d, 64e могут пропускать свет, излучаемый светоизлучающим элементом 27 передающего фотодатчика 26, установленным в корпусе 2 машины, когда катушка 4 установлена в камере 3. Каждый из светопропускающих участков 64, 64а, 64b, 64c, 64d, 64e может иметь сечение, параллельное осевому направление, при котором сторона светоизлучающего элемента 27 выполнена более узкой, чем сторона светопринимающего элемента 28. Между каждым из светопропускающих участков 64, 64а, 64b, 64c, 64d, 64e и внешней поверхностью внутренней трубки 40 может быть выполнен зазор, который предотвращает отражение света, излучаемого элементом 27, внешней поверхностью внутренней трубки, и его прохождение через участки 64, 64а, 64b, 64c, 64d, 64e.
В вышеописанной конфигурации внутри участка втулки соосно сформирована внутренняя трубка, и между участком втулки и внутренней трубкой сформирована стенка, а между светопропускающими участками и внешней поверхностью внутренней трубки сформирован такой зазор, чтобы предотвратить отражение света, излучаемого светоизлучающим элементом, внешней поверхностью внутренней трубки и его прохождение через светопропускающие участки. Следовательно, даже если свет от светоизлучающего элемента отразиться от внешней поверхности внутренней трубки, он не попадет в светопропускающие участки и, следовательно, не возникнут ошибки обнаружения.
В катушке для проволоки каждый из светопропускающих участков 64b может быть сформирован так, что проходит к внешней периферийной кромке катушки 4 от пропускающего участка 71, через который проходит свет от светоизлучающего элемента 27 к светопринимающему элементу 28.
В вышеописанной конфигурации светопропускающие участки выполнены так, чтобы проходить к внешней периферийной кромке катушки из положений пропускания, через которые свет проходит от светоизлучающего элемента к светопринимающему элементу. Таким образом, светопропускающие участки могут быть выполнены в виде отверстии. Кроме того, светопропускающие участки могут быть выполнены не прямыми.
В катушке каждый из светопропускающих участков 64с может быть выполнен так, чтобы проходить к осевому центру катушки от пропускающего участка 71, через который свет проходит от светоизлучающего элемента 27 к светопринимающему элементу 28.
В вышеописанной конфигурации светопропускающие участки выполнены так, чтобы проходить к центральной оси катушки от пропускающего участка. Следовательно, светопропускающие участки могут быть выполнены в виде отверстий.
В катушке для проволоки светопропускающие участки могут быть непрерывными на участках, за исключением пропускающих участков 71, через которые свет проходит от светоизлучающего элемента 27 к светопринимающему элементу 28.
В вышеописанной конфигурации светопропускающие участки выполнены непрерывными на участках, за исключением пропускающих участков. Поэтому светопропускающие участки можно рассматривать как один светопропускающий участок.
Для достижения третьей цели по одному или более из вариантов настоящего изобретения информация о вращении в машине для обвязки арматуры определяется способом, при котором: на катушке 4, выполненной с возможностью установки в корпус 2 машины 1 для обвязки арматуры обеспечивают две области S1 и S2 для определения информации фотодатчиком 26, расположенным в корпусе 2 машины для обвязки арматуры; обеспечивают светопропускающие участки 64, 64а, 64b, 64c, 64d, 64e на одной из областей S1, S2 для определения информации в количестве, отличающемся от количества светопропускающих участков на второй области для определения информации; устанавливают в корпусе 2 машины для обвязки средство 32 обнаружения, выполненное с возможностью обнаружения концов двух областей S1, S2 для определения информации; используют сигнал, обнаруженный средством 32 обнаружения в качестве синхронизирующего сигнала для вращения катушки для проволоки; по количеству светопропускающих участков, обнаруженных между двумя синхронизирующими сигналами, определяют, какая из двух областей S1, S2 для определения информации была обнаружен; когда будет обнаружено, что обнаружена область S1 для определения информация о частоте вращения, определяют положение начала вращения катушки, в соответствии с тем, какой из светопропускающих участков был обнаружен фотодатчиком 26 после того, как средство 32 обнаружения обнаружит синхронизирующие сигналы после начала вращения катушки; определяют положение остановки вращения катушки в соответствии с тем, какой из светопропускающих участков был обнаружен фотодатчиком 26 после того как средством 32 обнаружения был обнаружен последний синхронизирующий сигнал; и когда катушка достигнет последнего этапа вращения, преобразуют величину подачи проволоки на основании величины вращения катушки между положением начала вращения и положением остановки вращения.
В вышеописанной конфигурации катушка для проволоки, съемно установленная в корпусе машины для обвязки арматурных прутков, выполнена с областью для определения информации фотодатчиком, расположенным в корпусе машины, при этом область для определения информации разделена на две области для определения информации - область для определения информации о типе катушки для проволоки, и область для определения информации о частоте вращения, а корпус машины для обвязки арматуры, в котором установлена катушка для проволоки, в которой сформированы светопропускающие участки, количество которых различно для разных областей для определения информации, снабжен средством обнаружения, выполненным с возможностью обнаружения концов двух областей для определения информации. Сигнал, обнаруженный средством обнаружения, используется в качестве синхронизирующего сигнала для вращения катушки, и та или иная область для определения информации катушки определяется по количеству светопропускающих участков, обнаруженных между двумя синхронизирующими сигналами. Когда будет определено, что катушка ориентирована областью для определения информации о частоте вращения, определяется положение начала вращения катушки в соответствии с тем, какой из светопропускающих участков обнаружил фотодатчик после того, как средство обнаружения обнаружило синхронизирующие сигналы во время начала вращения катушки, а положение остановки вращения катушки определяют в соответствии с тем, какой из светопропускающих участков обнаружил фотодатчик после того, как средство обнаружения обнаружит последний синхронизирующий сигнал во время остановки вращения катушки. Когда катушка приближается к последнему этапу своего вращения, преобразуют величину подачи проволоки на основании величины вращения катушки между положением начала вращения и положением остановки вращения. Следовательно, величина подачи проволоки, определенная средством подачи проволоки, сравнивается с величиной подачи проволоки, преобразованной из величины вращения катушки, и если величина подачи, определенная по величине вращения подающих шестерен меньше, чем величина подачи проволоки, преобразованная из величины вращения катушки, проволока подается избыточно за счет этой разницы между ними. Таким образом, когда точность подачи на средстве подачи проволоки снизится, возможна коррекция подачи управляющим средством.
Кроме того, согласно одному или более из вариантов настоящего изобретения, информация о вращении в машине для обвязки арматуры определятся способом, при котором: на катушке 4, устанавливаемой в корпус 2 машины 1 для обвязки арматуры, обеспечивают две области S1, S2 для определения информации фотодатчиком 26, расположенным корпусе 2 машины для обвязки арматуры; обеспечивают светопропускающие участки 64, 64а, 64b, 64c, 64d, 64e на одной из областей S1, S2 для определения информации в количестве, отличающемся от количества светопропускающих участков на второй области для определения информации; устанавливают в корпусе 2 машины для обвязки средство 32 обнаружения, выполненное с возможностью обнаружения концов двух областей S1, S2 для определения информации; используют сигнал, обнаруженный средством 32 обнаружения в качестве синхронизирующего сигнала для вращения катушки для проволоки; по количеству светопропускающих участков, обнаруженных между двумя синхронизирующими сигналами, определяют, какая из двух областей S1, S2 для определения информации была обнаружен; и когда будет обнаружено, что обнаружена область S2 для определения информации о типе катушки, определяют тип катушки в соответствии с количеством светопропускающих участков в области S2 для определения информации, содержащей информацию о типе катушки.
В вышеописанной конфигурации катушка для проволоки съемно установлена в корпусе машины для обвязки арматуры, выполнена с областью для определения информации фотодатчиком, расположенным в корпусе этой машины, при этом область для определения информации разделена на две области, с одной из которых считывается информация о типе катушки, а с другого - о частоте вращения катушки, при этом в корпусе машины для обвязки арматуры, в который устанавливаются катушки для проволоки, на которых в разных количествах выполнены светопропускающие участки, установлено средство обнаружения, выполненное с возможностью обнаружения концов двух областей для определения информации. Сигнал, обнаруженный средством обнаружения, используется в качестве синхронизирующего сигнала для вращения катушки, при этом по количеству светопропускающих участков, обнаруженных между двумя синхронизирующими сигналами, определяют, какая из двух областей для определения информации была обнаружена. Когда определяется, что обнаружена область для определения информации о типе катушки, по количеству светопропускающих участков, имеющихся в этой области, определяют тип катушки. Поэтому, в соответствии с типом катушки можно немедленно задать величину подачи проволоки или задать крутящий момент и т.п. для проволоки, подавая питание на электродвигатель.
Другие аспекты и преимущества настоящего изобретения будут очевидны из нижеследующего описания, чертежей и формулы.
Краткое описание чертежей
Фиг.1 представляет собой вид в перспективе контура машины для обвязки арматуры по иллюстративному варианту настоящего изобретения, с которой снята крышка с одной стороны.
Фиг.2 представляет собой вид в перспективе сзади машины для обвязки арматуры.
Фиг.3 представляет собой вид сбоку машины для обвязки арматуры в состоянии, когда элемент стенки машины для обвязки арматуры удален.
Фиг.4 представляет собой сечение по линии а-а на фиг.3.
Фиг.5 представляет собой сечение по линии b-b на фиг.3.
Фиг.6 представляет собой вид в перспективе машины для обвязки арматуры, из которой извлечена катушка для проволоки по фиг.2.
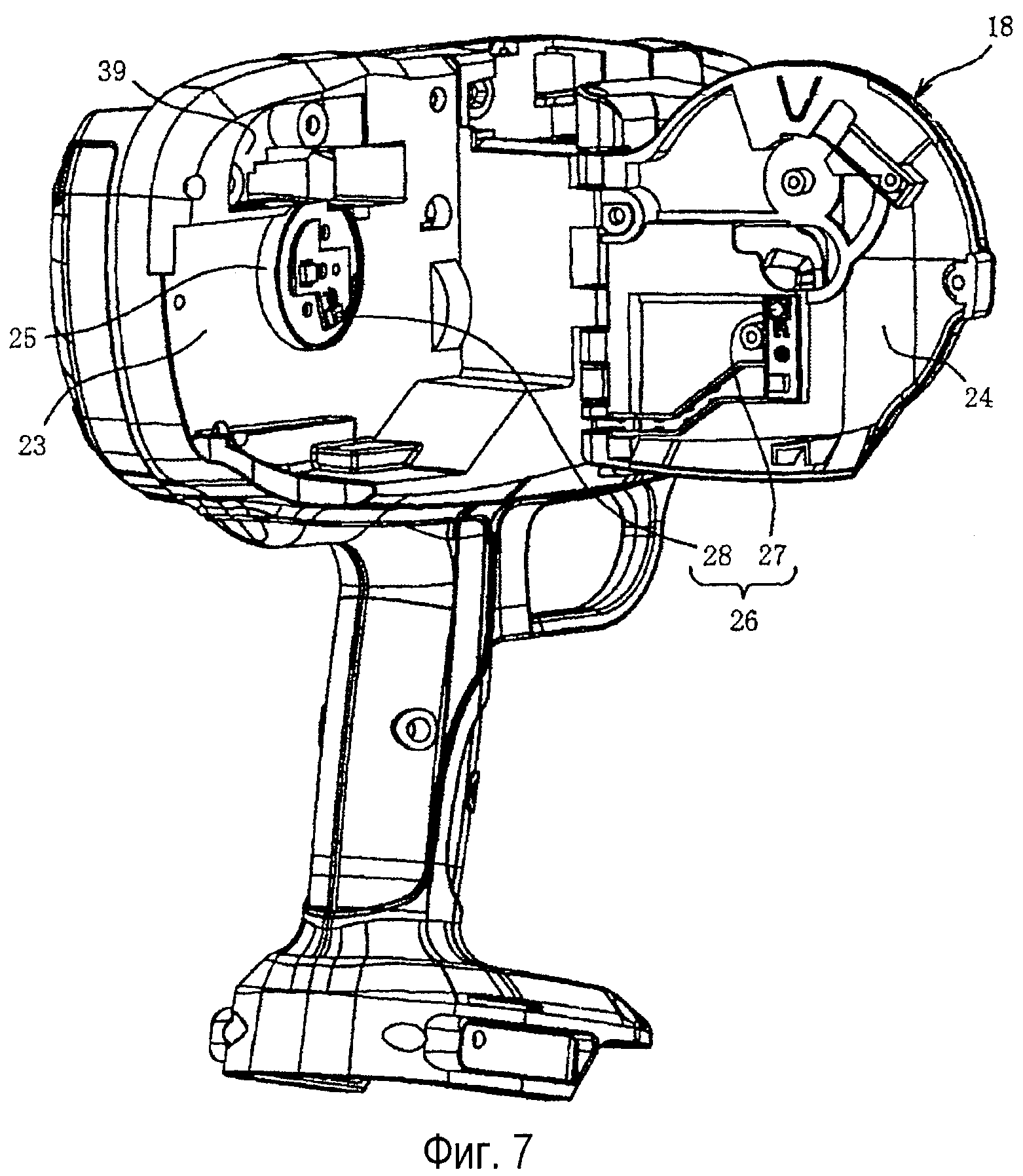
Фиг.7 представляет собой вид в перспективе, иллюстрирующий внутреннюю часть камеры с открытым элементом стенки.
Фиг.8 представляет собой вид сверху машины для обвязки арматуры, из которой извлечена катушка по фиг.3.
Фиг.9 представляет собой сечение существенных участков, показывающий место установки датчика.
Фиг.10 представляет собой вид сверху, иллюстрирующий соотношение положений между контактным датчиком и катушкой.
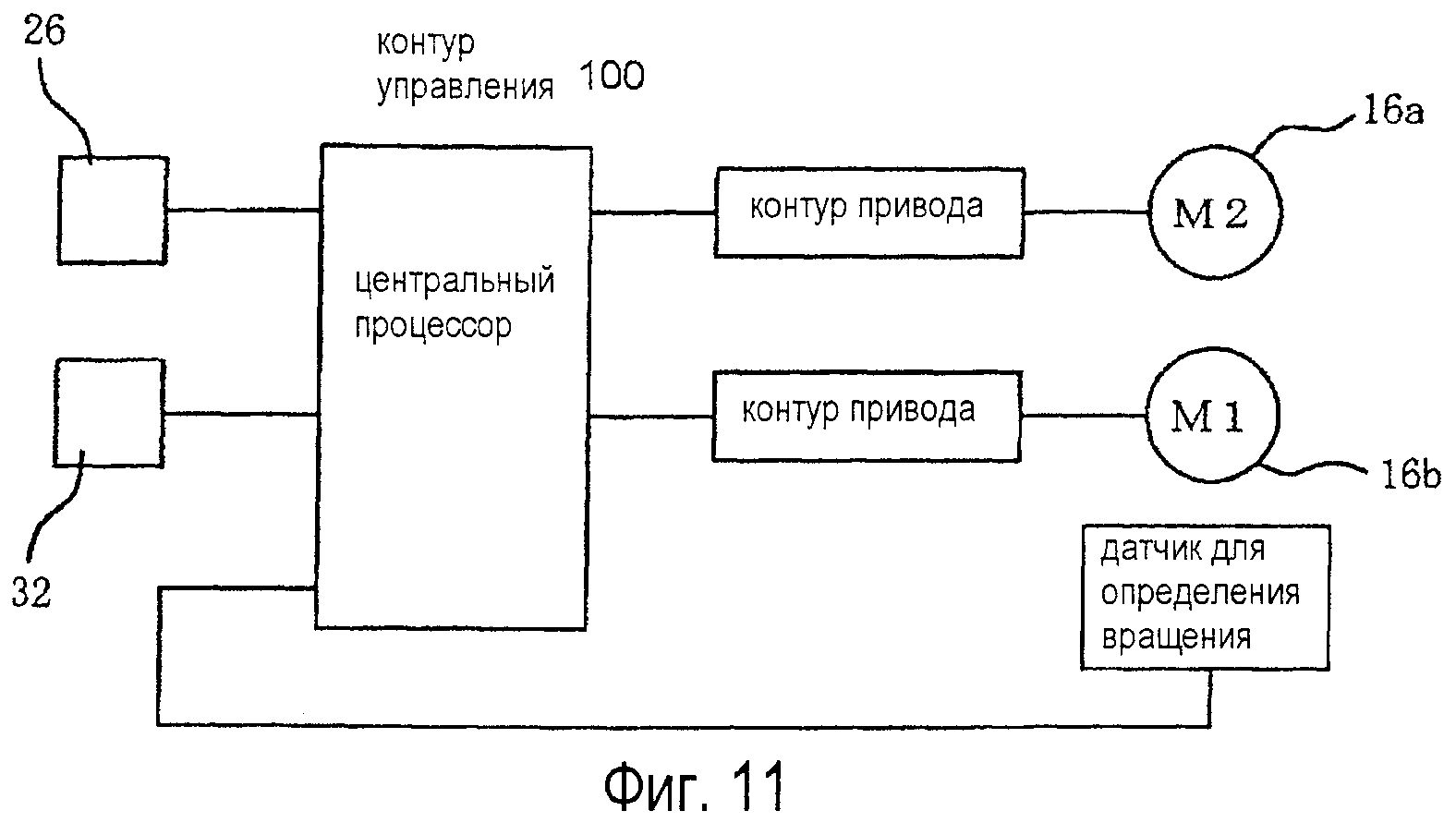
Фиг.11 представляет собой блок-схема контура управления.
Фиг.12 представляет собой вид сбоку катушки для проволоки.
Фиг.13 представляет собой вид сбоку катушки для проволоки со стороны, противоположной показанной на фиг.10.
Фиг.14 представляет собой сечение по линии с-с на фиг.10.
Фиг.15 представляет собой сечение по линии d-d на фиг.10.
Фиг.16 представляет собой сечение по линии е-е на фиг.10.
Фиг.17 представляет собой сечение, иллюстрирующее форму, не являющуюся предпочтительной.
Фиг.18 представляет собой вид спереди катушки для проволоки.
Фиг.19 представляет собой сечение по линии f-f на фиг.16.
Фиг.20 представляет собой вид сбоку, иллюстрирующий детали области для определения информации на катушке для проволоки.
Фиг.21 представляет собой диаграмму, иллюстрирующую форму выходного сигнала при вращении катушки.
Фиг.22 представляет собой блок-схему, иллюстрирующую порядок определения величины вращения катушки.
Фиг.23 представляет собой диаграмму, иллюстрирующую диапазон, в котором можно определить начало и прекращение вращения.
Фиг.24 представляет собой вид сбоку другой катушки для проволоки.
Фиг.25 представляет собой сечение по линии g-g на фиг.24.
Фиг.26 представляет собой вид сбоку катушки, в которой в различных областях для определения информации имеется одинаковое количество светопропускающих участков.
Фиг.27(а) и 27(b) представляют собой виды сбоку катушки для проволоки, иллюстрирующие форму, включающую круглый светопропускающий участок.
Фиг.28 представляет собой диаграмму, иллюстрирующую форму выходного сигнала обычного датчика.
Фиг.29(а), 29(b) и 29(с) представляют собой соответственно вид сбоку другой формы светопропускающего участка катушки, увеличенный вид этого участка и сечение по линии h-h.
Фиг.30(а), 30(b) и 30(с) представляют собой соответственно, вид сбоку еще одной формы светопропускающего участка катушки, увеличенный вид этого участка и сечение по линии i-i.
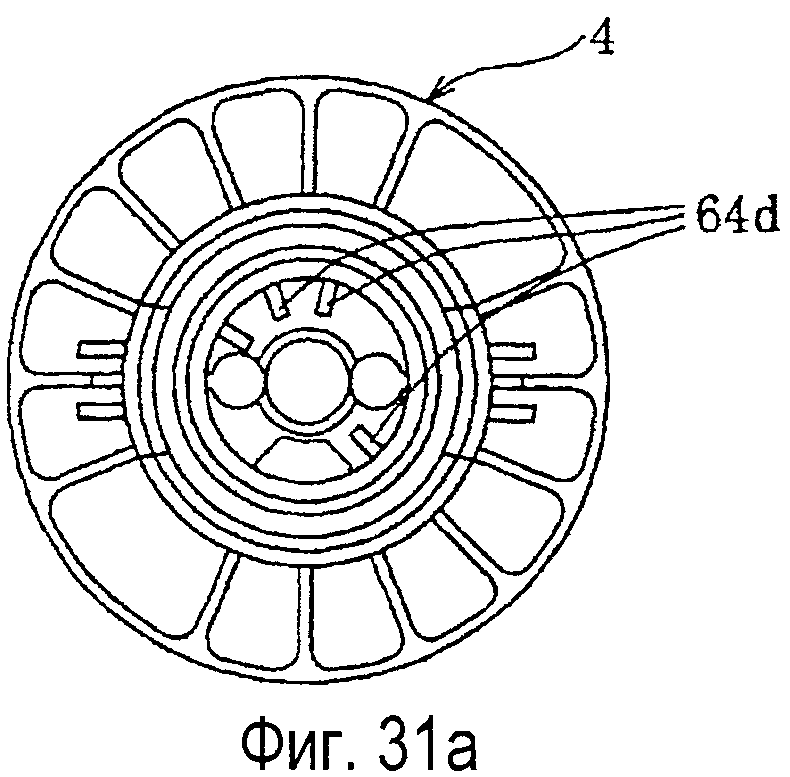
Фиг.31(а), 31(b) и 31(с) представляют собой соответственно, вид сбоку еще одной формы светопропускающего участка катушки, увеличенный вид этого участка и сечение по линии j-j.
Фиг.32 представляет собой увеличенный вид еще одной формы светопропускающего участка катушки.
Описание ссылочных позиций
1 - машина для обвязки арматуры
2 - корпус машины
3 - камера
26 - передающий фотодатчик
27 - светоизлучающий элемент
28 - светопринимающий элемент
43 - участок втулки
44, 45 - фланец
64а, 64b, 64c, 64d, 64e - светопропускающий участок
Подробное описание иллюстративных вариантов осуществления изобретения
Далее со ссылками на чертежи следует описание иллюстративного варианта осуществления настоящего изобретения.
На фиг.1-4 позицией 1 обозначена машина для обвязки арматуры. В машине 1 в камере 3, выполненной в корпусе 2, установлена катушка 4, вокруг которой намотана проволока 5 для обвязки арматурных прутков, которая подается с поворотом и обматывается вокруг стержней 6, после чего скручивается, связывая арматурные стержни 6.
Корпус 2 машины снабжен направляющей трубкой 7, через которую проходит проволока 5, вытягиваемая с катушки 4. Один конец 7а направляющей трубки 7 открыт в камеру 3, а другой конец расположен перед направляющим участком 11, который будет описан ниже. На промежуточном участке направляющей трубки 7 расположена пара подающих шестерней 8, которые являются средством подачи проволоки 5. Проволока 5 зажата между подающими валками, выполненными за одно целое с подающими шестернями 8, и проволока 5 подается вперед электродвигателем (не показан).
Когда крючок 10 включает выключатель, электродвигатель вращается и приводит во вращения подающие шестерни 8. Затем, проволока 5, намотанная на катушку 4, расположенную в камере 3, подается вперед относительно корпуса 2 машины по направляющей трубке 7 за счет вращения подающих шестерней 8.
Направляющий участок 11, загибающий проволоку, образован на конце направляющей трубки 7 так, что проволока, подаваемая из корпуса 2 машины, выходит изогнутой. Конец направляющего участка 11 изогнут и имеет форму дуги окружности. Это позволяет загибать проволоку и обматывать ею арматурные стержни 6 между направляющим участком 11 и нижней направляющей 12.
Дополнительно на направляющем участке 11 расположено средство для отрезания проволоки (не показано). Когда подача проволоки 5 достигнет заданной величины, средство для отрезания проволоки отрезает проволоку 5.
В нижней части переднего конца корпуса 2 машины, обращенного к арматурному стержню 6, имеется пара пластинчатых упоров 13, упирающихся в стержень 6 и на конце каждого из пластинчатых упоров 13 установлено скручивающее устройство 17, которое имеет скручивающий крюк 14.
Устройство 17 для скручивания проволоки содержит гильзу 15, на которой поворачивается крюк 14 для открывания и закрывания, и которая перемещается вперед электродвигателем 16а для закрывания крюка 14, тем самым захватывая проволоку 5, намотанную в форме петли вокруг арматурных стержней 6, зацепленных с упорами 13, после чего крюк 14 приводится во вращение вместе с гильзой 15, скручивая проволоку 5 для обвязки прутков 6. После этого скручивающее устройство вращает крюк 14 в противоположную сторону и отводит гильзу 155 назад, тем самым отсоединяя гильзу 15 от проволоки 5 и возвращая гильзу 15 в исходное положение. Кроме того, когда скручивающее устройство 17 работает, гильза 15, перемещенная вперед, своим движением приводит в действие средство для отрезания проволоки и, таким образом, проволока обрезается. Сразу после этого выполняется скручивание проволоки 5.
Кроме того, устройство, подающее проволоку за счет вращения подающих шестерней 8, приводится в действие электродвигателем 16а (см. фиг.1), а скручивающее устройство 17 приводится в действие электродвигателем 16b (см. фиг.4). Работой устройства подачи проволоки и скручивающего устройства 17, как показано на фиг.11 по жестко заданному циклу управляет контур управления. Более того, электродвигатель 16а снабжен датчиком обнаружения вращения, с помощью которого определяется величина поворота подающих шестерней 8, и сигнал от датчика подается в качестве сигнала обратной связи на контур управления.
Далее, в задней части корпуса 2 машины имеется камера 3 для катушки 4, которая будет описана ниже. Как показано на фиг.2, 3, 5, 6, и т.д., камера 3 образована передней стенкой 21, нижней стенкой 22 и боковыми стенками 23 и 24, которые расположены между корпусом 2 машины и элементом 18 стенки, выполненным в корпусе машины. Одна боковая стенка 23 выполнена на боковой стороне корпуса 2 машины, а другая боковая стенка 24, выполнена у элемента 18 стенки. На центральном участке боковой стенки 23 на боковой стороне корпуса 2 машины выполнен круглый выступ 25. С другой стороны, на элементе 18 стенки, в положении соответствующем круглому выступу 25, выполнен вал 20 крепления катушки, выполненный с возможностью введения в камеру 3 и извлечения из нее. Круглый выступ 25 и вал 20 крепления катушки расположены на одной оси для поддержки катушки 4 с возможностью вращения. Кроме того, хотя элемент 18 стенки можно открывать и закрывать, как показано на фиг.6, этот элемент стенки прикреплен к корпусу 2 машины винтами. Соответственно, вал 20 крепления катушки выполнен так, чтобы входить и выходить из камеры 3, чтобы можно было установить катушку, и в состоянии, когда вал 20 вставлен в камеру 3, он может запираться в этом положении.
В то же время, как показано на фиг.5-8, на обеих боковых стенках 23 и 24 установлен передающий фотодатчик. Фотодатчик 26 состоит из светоизлучающего элемента 27 и светопринимающего элемента 27, при этом светоизлучающий элемент установлен рядом с валом 20 крепления вала на элементе 18 стенки, а светопринимающий элемент 28 установлен у круглого выступа 25 на боковой стенке корпуса 2 машины. Поскольку круглый выступ 25 входит в кольцевое углубление 47 (см. фиг.5) катушки, окружающий свет на светопринимающий элемент 28 не попадает.
Кроме того, как показано на фиг.4 и 6-9, в верхнем отверстии 39 (см. фиг.7) круглого выступа 25 одной боковой стенки 23 камеры 3 установлен датчик 32 контакта. Датчик 32 контакта является механическим выключателем и, как показано на фиг.4, состоит из маятникового элемента 34, который подвижно установлен на шарнире 33, контактного элемента 35, расположенного на конце маятникового элемента 34, упругого элемента (не показан), который поджимает контактный элемент 35 к катушке 4, магнита 37, расположенного на другой стороне от маятникового элемента 34, и датчика 38 Холла, приводимого в контакт с магнитом упругим элементом.
Датчик 32 контакта расположен в корпусе 2 машины и образован подвижным контактным элементом 35, который выступает в камеру 3 из отверстия, проходящего через боковую стенку 23, и магнитом 37, установленным внутри подвижного контактного элемента 35, а также, датчиком 38 Холла. Выступы 41 и 42 (см. фиг. 9 и 10), выполнены на катушке 4 с возможностью вхождения в контакт с подвижным контактным элементов 35. Поэтому, когда подвижный контактный элемент 35 контактирует с выступами 41 и 42, маятниковый элемент поворачивается, сжимая упругий элемент, и магнит 37 отходит от датчика 38 Холла, благодаря чему датчик 32 контакта обнаруживает выступы 41 и 42.
Кроме того, как показано на фиг.8, подвижный контактный элемент 35 датчика 32 контакта расположен непосредственно над круглым выступом 25, а светопринимающий элемент 28 передающего фотодатчика 26 расположен, по существу, непосредственно под этим подвижным контактным элементов.
В то же время, выходной сигнал от фотодатчика 26 передается на контур управления, показанный на фиг.11. Датчик 32 контакта также соединен с контуром управления, и его выходной сигнал, в соответствии с изменением напряжения на датчике Холла, также передается на контур управления.
Передняя стенка 21 камеры 3 снабжена упругим элементов 54, который выполнен с возможностью зацепления с катушкой 4. Когда подача проволоки заканчивается, упругий элемент 54 под воздействием электродвигателя входит в зацепление с катушкой 4 для остановки ее вращения.
Далее со ссылками на фиг.12-19 следует описание катушки 4. Катушка 4 для проволоки выполнена из пластмассы, например, из смолы ABS, полиэтилена, и полипропилена которые обладают хорошей стойкостью к износу и изгибу, при этом пластмасса имеет черный цвет, чтобы не допустить попадание окружающего света. Катушка 4 съемно устанавливается в камере 3 в корпусе 2 машины для обвязки арматуры (см. фиг.2) и состоит из участка 43 втулки, на которую намотана проволока 5, и дискообразных фланцев 44 и 45, которые расположены на обеих сторонах участка 43 втулки. Участок 43 втулки имеет цилиндрическую форму и выполнен за одно целое с парой фланцев 44 и 45. На внешней периферии 46 одного фланца 44 имеется собачка 46, выполненная с возможностью зацепления с упругим элементом 54 для торможения в камере 3.
В фланце 45 имеется кольцевое углубление 47, выполненное с возможностью зацепления с круглым выступом 25 машины 1, и это кольцевое углубление 47 окружает кольцевой прилив 48. Внешняя периферийная кромка прилива 48 выполнена с конической поверхностью 50. Донная часть кольцевого углубления 47 доходит до торцевой поверхности внутренней трубки 40, которая будет описана ниже. Кроме того, на противоположных сторонах внутренней трубки 40 на внешней периферийной кромке 50 прилива 48 выполнена пара трапецеидальных выступов 41 и 42. На обеих сторонах выступов 41, 42 выполнены наклонные кромки 55 (см. фиг.10).
Центральная часть участка 43 втулки выполнена с внутренней трубкой 40, которая, по существу, сосна с участком 43 втулки и внутри этой внутренней трубки 40 выполнено крепежное отверстие 56 (см. фиг.5), в которое может вставляться вал 20 крепления катушки, предусмотренный на элементе 18 стенки машины 1. Как показано на фиг.15, внутренняя трубка 40 и участок 43 втулки соединены друг с другом боковой стенкой 60.
Толщина стенки внутренней трубки 40 неравномерна. Как показано на фиг.15, внутренняя трубка толще у фланца 44, чем ее средняя часть, и сформирована так, чтобы у фланца 45 иметь меньшую толщину. Это вызвано тем, что толщина стенки бокового участка 58 зубьев 57 выполнена большой, чтобы сохранить прочность, позволяющую вращающемуся валу намоточного устройства (не показано), зацепляться с зубьями 57, выполненными на конце внутренней трубки 40 на стороне фланца 44, тем самым принудительно вращая катушку 4 при намотке на нее проволоки. Боковая стенка 60 сформирована на границе между толстостенным участком 58 и тонкостенным участком 59. Поэтому боковая стенка 60 расположена немного ближе к фланцу 45, чем к центру, и внутренние поверхности внутренней трубки 40 и участка втулки 43 образуют круглое углубление 47. Кроме того, внешние периферийные кромки фланцев 44 и 45 выполнены с усиливающими ребрами 61.
Кроме того, как показано на фиг.18 и 19, в фланце 44 выполнено отверстие 62 для введения проволоки, которое проходит от внешней периферийной кромки к участку 43 втулки. Конец проволоки 5, которым заканчивается намотка, фиксируется и удерживается этим отверстием 62. В участке 43 втулки и во внутренней трубке 40 выполнено отверстие 63 для введения проволоки. В отверстие 63 вставляется и в нем удерживается тот конец проволоки, с которого начинается намотка. Когда проволока 5 намотана, ее конец, с которого начинается намотка, вставляют в отверстие 63 и наматывают во внутренней трубке 40, чтобы предотвратить выскальзывание этого конца из отверстия 63. В этом состоянии начинают намотку проволоки вокруг периферийной поверхности участка втулки 43. Кроме того, даже если в направлении намотки проволоки 5 возникает большое усилие, натяжение принимается кромкой отверстия 63.
В боковой стенке 60, как показано на фиг.12-14, выполнены сквозные отверстия 64, служащие светопропускающими участками для определения углового положения катушки 4 или типа проволоки. Эти сквозные отверстия 64 пропускают свет от светоизлучающего элемента 27 передающего фотодатчика 26 (см. фиг.5), установленного в корпусе 2 машины, и сформированы по кругу вокруг центральной оси катушки 4, т.е., центральной оси внутренней трубки 40.
В то же время, как показано на фиг.9-15, светоизлучающий элемент 27 и светопринимающий элемент 28 расположены так, что светоизлучающий элемент 27 находится на расстоянии от осевого центра Р катушки 4, а светопринимающий элемент 28 находится близко к осевому центру Р катушки 4 из-за ограничений, связанных с креплением, и оптическая ось 65 не совпадает с осевым центром Р катушки 4. Кроме того, существует возможность отклонения оптической оси 65 луча, излучаемого элементом 27, в направлении вращения или в радиальном направлении катушки 4 даже во время вращения катушки 4.
Таким образом, для того, чтобы справиться с отклонением оптической оси 65 и отклонением, возникающим во время вращения, сквозные отверстия 64 выполнены в виде длинных отверстий, удлиненных в радиальном направлении от осевого центра Р катушки 4. Для того, чтобы получить высокую разрешающую способность и справиться с отклонением в радиальном направлении, ширина сквозных отверстий 64 должна составлять 1,5-2,5 мм. Удлиняя сквозные отверстия 64 в радиальном направлении, как показано на фиг.15, можно справиться с радиальным отклонением оптической оси 65 света, излучаемого элементом 27 в сторону светопринимающего элемента 28. Кроме того, также могут поглощаться отклонения оптической оси 65, вызванные биением катушки относительно камеры 3.
Более того, хотя разрешающую способность можно повысить уменьшением диаметра сквозных отверстий, оптическая ось отклоняется, как описано выше. Поэтому, сквозные отверстия следует выполнять в непосредственной близости к оптической оси, т.е., к осевому центру катушки 4.
Свет, проходящий через отверстия 64, рассеивается. Поэтому, когда отверстия 64 расположены близко к поверхности внутренней стенки 66 внутренней трубки 40, как показано пунктирной линией на фиг.17, свет, излучаемый и рассеиваемый элементом 27, попадает на поверхность 66 внутренней стенки и отражается от нее до того, как достигнет сквозного отверстия 64, при этом отраженный свет попадает на светопринимающий элемент 28, приводя к ошибкам обнаружения. Когда сквозные отверстия 64 выполнены прямыми, существует вероятность того, что часть света от излучающего элемента 27 может попасть на внутреннюю поверхность 67 отверстий и отразиться от нее. Когда на светопринимающий элемент попадает такой отраженный свет, это также приводит к ошибкам обнаружения.
Чтобы предотвратить такое отражение, как показано на фиг.16, предпочтительно, чтобы сквозные отверстия 64 отстояли от внешней поверхности 66 внешней стенки внутренней трубки 40 так, чтобы свет, отраженный от поверхностей перед отверстиями 64 не принимался, а открытые концы отверстий 64 выполняют как можно меньше, чтобы затруднить попадание отраженного света в отверстия. Внутренние поверхности 67 скошены и их участки в направлении вращения могут быть выполнены под углом, чтобы свет не отражался внутренними поверхностями 67 сквозных отверстий 64 и так, чтобы получить почти такой же угол, что и угол падения света, входящего через открытые концы сквозных отверстий 64. Более того, боковая стенка 60, в которой сформированы сквозные отверстия 64, расположена немного ближе к светопринимающему элементу 28, а не на середине между светоизлучающим элементом 27 и светопринимающим элементом 28. Благодаря этому, поскольку свет, проходящий через отверстия 64, достигает светопринимающего элемента 27 без сильного рассеивания, снижается вероятность ошибочного обнаружения.
Когда катушку 4 вставляют в камеру 3 корпуса 2 машины, вал 20 крепления катушки, выполненный на элементе 18 стенки, показанной на фиг.5, можно вывести из камеры 8,что позволяет вставить катушку в камеру 3, при этом в кольцевое углубление 47 катушки 4 можно вставить круглый выступ 25, выполненный на боковой стенке 24 камеры 3, а вал 20 крепления катушки можно вставить в крепежное отверстие 56 катушки и запереть в нем.
Согласно вышеописанной конфигурации, передающий фотодатчик, имеет светоизлучающий элемент, установленный на одной из двух боковых стенок камеры машины для обвязки арматуры, и светопринимающий элемент, установленный на другой из двух боковых стенок этой камеры, при этом в катушке выполнено множество сквозных отверстий, которые пропускают свет, излучаемый светоизлучающим элементом, а машина снабжена контуром управления, считывающим информацию о вращении катушки по количеству светопропускающих отверстий, обнаруженных фотодатчиком во время вращения катушки. Таким образом, поскольку свет, генерируемый светоизлучающим элементом и прошедший через отверстия в катушке, обнаруживается светопринимающим элементом, на процесс обнаружения не оказывает влияние неравномерность поверхности катушки и точность обнаружения информации о вращении повышается.
Кроме того, поскольку свет, генерируемый светоизлучающим элементом, непосредственно обнаруживается светопринимающим элементом, светопринимающий элемент может получать достаточное количество света, даже если считываемый участок меньше, по сравнению с отражающим фотодатчиком и разрешающая способность датчика повышается.
Кроме того, по мере повышения разрешающей способности датчика точность определения величины подачи проволоки, рассчитанной по величине вращения катушки, также повышается, и возникает возможность определения уменьшения величины подачи.
Поскольку сквозные отверстия выполнены в виде щелевидных длинных отверстий, удлиненных в радиальном направлении катушки, обнаружение возможно, даже если оси светопринимающего элемента и светоизлучающего элемента смещаются при работе из-за вибраций и т.п., и не полностью совпадают друг с другом.
Более того, светоизлучающий элемент и светопринимающий элемент должны располагаться в положении, в котором оптические оси отклоняются от осевого центра катушки и не параллельны, что вызвано ограничениями по креплению. Существует вероятность того, что оптическая ось света, генерируемого светоизлучающим элементом, может отклониться в направлении вращения или в радиальном направлении катушки, даже во время вращения катушки. Однако, поскольку отверстия, пропускающие свет от светоизлучающего элемента к светопринимающему элементу имеют форму щели, удлиненной в радиальном направлении катушки, такое радиальное отклонение оптической оси допустимо. Другими словами, светоизлучающий элемент или светопринимающий элемент можно разместить ближе к центральной оси катушки, чем другой из этих элементов, и отсутствует необходимость в обязательном сохранении параллельности оптической оси светоизлучающего элемента и осевого центра катушки. Таким образом, повышается степень свободы конструкции.
В то же время, как показано на фиг.20, на катушке 4 выполнены две области для определения информации, обнаруживаемых фотодатчиком. Одна область для определения информации (первая область S1 для определения информации) образована тремя сквозными отверстиями 64, а другая область (вторая область S2 для определения информации) образована одним сквозным отверстием 64. Области S1, S2 для определения информации представляют собой области, на которых можно обнаруживать отверстия 64 между двумя сигналами, которые выводятся, когда датчик 32 контакта обнаруживает два выступа 41 и 42, и три отверстия 64 первой области S1 для определения информации образованы на линиях, которые образуют угол 40° с граничной линией Q между первой и второй областями S1 и S2 для определения информации. Наоборот отверстие 64 второй области S2 для определения информации образовано рядом с правой стороной чертежа.
Таким образом, когда выступ 41 катушки 4 и сквозные отверстия 64 обнаруживаются датчиком 32 контакта и передающим фотодатчиком 26 для подтверждения точности обнаружения, возникает сигнал, форма которого показана на фиг.21. В соответствии с этим, поскольку обнаруживается только свет, прошедший через отверстия 64, точность обнаружения повышается и на нее не влияют неровности поверхности катушки 4. То есть, если диаметр обнаруживаемого участка в отражающем фотодатчике должен быть приблизительно 8 мм, то передающий фотодатчик 26 может выполнять обнаружение, даже если ширина отверстий 64 составляет приблизительно 2 мм. Соответственно, хотя в вышеописанном варианте на первой области S1 для определения информации выполнено три сквозных отверстия 64, разнесенных на 40°, достаточно высокая разрешающая способность может быть достигнута, даже если будет выполнено четыре отверстия 64.
Далее, когда сигнал обнаружения, генерируемый при обнаружении выступов 41 и 42, используется в качестве опорного сигнала, в этих двух областях S1, S2 для определения информации благодаря разному количеству отверстий 64 в этих участках, можно определить информацию, имеющую разное значение. Например, как будет описано ниже, первая область S1 для определения информации катушки 4 может иметь фиксированное количество отверстий 64 для определения величины вращения, а переменное количество отверстий 64 на второй области S2 для определения информации свидетельствует о типе катушки 4 для проволоки. Поэтому, разрешающая способность фотодатчика повышается благодаря увеличению количества информации на катушке 4. В результате на катушку 4 можно наносить разные типы информации, например, измерительную информацию, позволяющую определить величину вращения катушки, с помощью матричного способа размещения отверстий 64, или информацию, идентифицирующую тип катушки 4 для проволоки.
Далее следует описание способа определения величины вращения катушки 4 на основании датчиков двух типов, и соответствующих им наборов выступов и сквозных отверстий 64.
Для определения величины вращения катушки 4, необходимо определить положение начала вращения и положение остановки вращения, используя датчики двух типов.
Как показано на фиг.20, сигнал обнаружения выступов 41 и 42 выводится датчиком 32 контакта, каждый раз, когда первая область S1 для определения информации, то есть расположенная в верхней половине, и вторая область S2 для определения информации, то есть, расположенная в нижней половине, совершают половину оборота. Этот сигнал обнаружения становится синхронизирующим сигналом, или точкой отсчета. В результате, как показано на фиг.21, когда после опорного сигнала R1 выводится следующий опорный сигнал R2, выводятся три сигнала S1, S2 и S3 обнаружения на области S1 для определения информации и один сигнал S4 обнаружения на области S2 для определения информации в соответствии с количеством отверстий 64, обнаруженных фотодатчиком 26, при каждом полуобороте катушке 4. Таким образом, положение начала вращения и положение остановки вращения катушки 4 можно обнаружить следующим образом.
В дальнейшем описании приводятся ссылки на блок-схему по фиг.22.
Сначала, когда катушку 4 вставляют в корпус машины для обвязки арматуры и вращают, либо датчик 32 контакта, либо фотодатчик 26 предварительно обнаруживают пропущенный свет выступов 41 и 42, которые являются обнаруживаемыми участками, или свет от светоизлучающего элемента 27 (этап 101). То есть, когда катушка 4 вращается, и выступы 41 и 42 катушки 4 контактируют с подвижным контактным элементом 35 датчика 32 контакта, подвижный контактный элемент 35 поворачивается, магнит 37 отходит от датчика 38 Холла и на контур управления по фиг.11 подается импульсный сигнал, в соответствии с изменением напряжения. Далее, когда свет, излучаемый элементом 27, пройдет через отверстия 64 и будет обнаружен светопринимающим элементом 28, сигнал обнаружения передается на контур управления. Контур управления определяет колебания выходного напряжения датчика 32 или 26, вызванные сигналом обнаружения, и рассчитывает количество выступов 41 и 42 или количество отверстий 64.
Таким образом, когда фотодатчик 26 предварительно обнаруживает свет до сигнала датчика 32 контакта, процесс переходит на левую ветвь блок-схемы по фиг.22. Сначала, катушка находится в области A, B, C, D или E по фиг.20. Когда катушка находится в положении D, поскольку датчик 32 контакта уже определил выступ 41 или 42 (этап 102), этот случай не применяется. Таким образом определяется, сколько раз контур управления обнаружил пропущенный свет после обнаружения следующего выступа (этап 103). Когда количество обнаружений равно одному, начальным положением обнаружения является либо область С, либо область Е. Если начальным положением обнаружения является область Е, из-за угла вращения от одного конца области до другого, ошибка в определении величины вращения велика. Поскольку невозможно определить, какая из областей, С или Е, является начальным положением обнаружения, в этом случае вращение не обнаруживается (этап 104).
С другой стороны, когда пропущенный свет был обнаружен два или три раза, положением начала обнаружения является либо область А, либо область В. В этом случае, количество обнаружений фотодатчиком 26, равное двум или трем, т.е., находится ли положение начала обнаружения в области А или в области В, запоминается (этап 105).
На следующем этапе операция обвязки продолжается, пока катушка 4 для проволоки не остановится (этап 106).
Затем, вращение не обнаруживается, пока количество обнаружений, выполненных датчиком 32 контакта, не достигнет в сумме 12 или более, т.е., пока катушка 4 не совершит шесть оборотов или более (этапы 107 и 108). Это вызвано тем, что отношение между величиной вращения катушки 4 и величиной подачи проволоки 5 на раннем и среднем этапах вращения не постоянно. То есть, на раннем и среднем этапах вращения высока вероятность того, что проволока 5 намотана на катушку 4 свободно. В этом случае величина вращения катушки 4 уменьшается по сравнению с величиной подачи проволоки 5. С другой стороны, поскольку проволока 5 на последнем этапе вращения намотана на катушку 4 плотно, величину подачи проволоки можно точно рассчитать по величине вращения катушки 4.
Когда количество обнаружений, выполненных датчиком 32 контакта, в сумме составляет двенадцать или более, начинается ожидание остановки катушки, датчик 32 контакта последний раз обнаруживает выступ и, затем вычисляется, сколько раз фотодатчик 26 обнаружил пропущенный свет (этап 109). Если количество обнаружений равно трем, значит, катушка остановилась в области D. В этом случае проверяется состояние А (этап 110) и обнаруживается вращение катушки 4 (этап 111). Если количество обнаружений равно двум, следовательно, катушка остановилась в области C. В этом случае проверяется состояние А (этап 112) и определяется вращение катушки 4 (этап 113).
С другой стороны, когда количество обнаружений равно одному, положение остановки катушки 4 находится в области С или в области Е. Когда количество обнаружений равно нулю, положение остановки катушки находится в области А или в области Е. Поскольку все положения остановки включают область Е, поэтому обнаружение вращения не выполняется (этап 114).
Далее, когда датчик 32 контакта ранее обнаружил свет перед фотодатчиком 26, процесс переходит на правую ветвь блок-схемы на фиг.22. Во-первых, когда ранее был обнаружен выступ 41 или 42, значит, положение начала обнаружения находится в области D или в области Е (этап 115).
Далее определяется, сколько раз контур управления обнаружил пропущенный свет до следующего выступа 42 или 41 (этап 116). Если пропущенный свет был обнаружен три раза, то поскольку положение начала обнаружения находится в области Е, в этом случае вращение не определяется (этап 117).
Когда пропущенный свет не обнаружен, или обнаружен один раз, поскольку положение начала обнаружения находится в области D, операция обвязки продолжается, пока катушка 4 не остановится (этап 118).
Затем, вращение не обнаруживается, пока количество обнаружений датчиком 32 контакта в сумме не составит двенадцать или более (этап 119), т.е., пока катушка 4 не совершит шесть оборотов или более (этап 120).
Когда количество обнаружений датчиком 32 контакта составляет двенадцать или более, выполняется ожидание, пока катушка 4 не остановится, датчик 32 контакта последний раз обнаруживает выступ 41 или 42, и, затем, определяется сколько раз фотодатчик 26 обнаруживал пропущенный свет (этап 121). Если количество обнаружений равно 0 или единице, катушка 4 остановилась в одной из областей Е, А и В. Поскольку этот случай включает область Е, то в этом случае обнаружение вращения не выполняется (этап 122).
С другой стороны, когда пропущенный свет был обнаружен два или три раза, положение начала обнаружения находится в области С или в области D. В этом случае, осуществляется обнаружение вращения катушки 4 (этап 123).
Подводя итог вышеизложенному, что касается диапазона, в котором можно определять вращение, как показано на фиг.23, когда фотодатчик 25 определяет наличие света до срабатывания датчика 32 контакта, определяется два набора и четыре типа аспектов обнаружения вращения, а когда датчик 32 контакта обнаруживает свет до фотодатчика 26, определяются один набор и два типа аспектов обнаружения вращения.
Таким образом, хотя невозможно обнаружить всю величину вращения катушек для проволоки, устанавливаемых в корпусе машины для обвязки арматуры, частоту вращения катушки 4 можно определить, если считать положение начала вращения и положение остановки вращения, показанные на фиг.23. Если можно определить частоту вращения катушки 4 на последнем этапе вращения, то из этой величины можно рассчитать величину подачи проволоки.
Вышеописанный передающий датчик 26 может определять величину вращения катушки 4 с этапом 40°. Поскольку интервал между сигналами составляет 40°, диапазоны, в которых вращение нельзя обнаружить сразу после начала вращения катушки 4 и непосредственно перед остановкой этого вращения, соответственно составляют 40°. Следовательно, максимальная ошибка обнаружения вращения, возникающая на одну операцию обвязки, составляет максимум 80°. Что касается этой ошибки, ошибка определения величины подачи проволоки составляет приблизительно 24 мм на последнем этапе вращения катушки 4. В отличие от этого, длина подаваемой проволоки недостаточна для создания прочной связки, когда поданная проволока короче необходимой длины на 40 мм и более. Соответственно, при такой разрешающей способности можно обнаружить уменьшение величины подачи на 40 мм и соответственно скорректировать величину подачи.
То есть, хотя величина подачи проволоки измеряется по вращению подающего двигателя 16а, поскольку подающие шестерни 8 со временем изнашиваются, заданную величину подачи выдержать невозможно. Поэтому, как показано на фиг.11, контур управления сравнивает величину подачи проволоки 5, измеренную по оборотам подающего двигателя 16а, который образует устройство подачи проволоки, с величиной подачи проволоки 5, преобразованной из величины вращения катушки 4, и увеличивает частоту вращения подающего двигателя 16а и компенсирует недостаточность подачи, если будет обнаружено, что величина подачи на шестернях 8 недостаточна. За счет такой обработки происходит двойная проверка подачи проволоки, и постоянно поддерживается высокое качество связок.
Далее при определении типа проволоки создав вторую область S2 для определения информации на катушке 4, на которой выполнено одно сквозное отверстие 64, или такое отверстие отсутствует, можно распознавать два типа проволоки, в зависимости от того, было ли обнаружено это отверстие 64, или нет. Кроме того, является ли область второй областью S2 для определения информации, можно определить по наличию двух или более сигналов, создаваемых сквозными отверстиями 64 между сигналами, создаваемыми двумя выступами. Когда будет определен тип проволоки, контур управления немедленно задает величину крутящего момента путем величины подачи проволоки 5 в соответствии с частотой вращения (углом поворота) подающих шестерней 8 или путем подачи питания на электродвигатель 16b в соответствии с типом проволоки.
Как описано выше, боковая стенка внутри участка втулки катушки 4 используется в качестве области для определения информации, и эта область выполнена с множеством сквозных отверстий, которые пропускают свет от передающего фотодатчика, установленного в корпусе машины. Поэтому, информацию о вращении, имеющую разное значение, такую как информацию для измерения величины вращения катушки по набору сквозных отверстий и информацию для идентификации типа проволоки, можно получить только при вращении катушки 4.
Кроме того, датчик, который посылает опорный сигнал, который определяет величину вращения катушки 4, не ограничивается механическим датчиком. Например, как показано на фиг.24 и 25, на боковую поверхность 68 боковой стенки 60 на фланце 45 можно нанести пару белых меток 51 и 51, чтобы они соответствовали выступам 41 и 42, показанным на фиг.10, и эти метки могут обнаруживаться отражающим фотодатчиком 26, выполненным в круглом выступе 25 на боковой стенке корпуса 2 машины.
Количество сквозных отверстий 64 в первой области S1 для определения информации не ограничивается вышеописанной формой. Если увеличить количество отверстий на одно, частота считывания положения начала вращения увеличится еще больше, и, кроме того, можно различать три или более типа проволоки.
Область для определения информации также не ограничена формой, при которой участок разделен на две полуокружности. Например, область с информацией о частоте вращения, по которой определяют частоту вращения катушки 4, может занимать 120°, а область с информацией о типе проволоки может занимать 60°. Количество областей для определения информации может определяться объемом информации о вращении и разрешающей способностью.
Кроме того, отсутствует необходимость в выполнении сквозных отверстий в разных количествах на соответствующих областях для определения информации. Как показано на фиг.26, количество сквозных отверстий 64 в области S1 для определения информации о величине вращения и количество сквозных отверстий 64 в области S2 для определения информации о типе проволоки может быть одинаковым. В этом случае, если определено число обнаружения для величины вращения, другое число становится информацией о типе проволоки.
Аналогично, область для определения информации не ограничивается формой, в которой она разделена на два. Поскольку область для определения информации может быть выполнена в соответствии с типом требуемой информации, она может быть разделена на три или более области для определения информации.
Кроме того, сквозные отверстия не ограничиваются щелевой формой. Например, как показано на фиг.27(а), эти отверстия могут быть круглыми отверстиями 64а, или квадратными. Если используется только два или три типа проволоки, для проведения различия между ними не требуется высокая разрешающая способность. В таком случае можно использовать круглые или прямоугольные сквозные отверстия. Кроме того, как показано на фиг.27(b), круглые и щелевидные отверстия 64 можно комбинировать друг с другом.
Кроме того, хотя светопропускающие участки были описаны как сквозные отверстия, через которые в вышеописанном варианте проходит свет, эти светопропускающие участки не ограничены отверстиями. Более, отсутствует необходимость в выполнении светопропускающих участков так, чтобы они ограничивались участками, пропускающими свет от светоизлучающего элемента 27 к светопринимающему элементу 28. Например, как показано на фиг.29(а), 29(b) и 29(с), светопропускающий участок 64b может быть выполнен так, чтобы проходить к внешней периферийной кромке катушки 4 от пропускающего участка 71, через который проходит свет от излучающего элемента к светопринимающему элементу. В этом случае как показано на этих чертежах, конец светопропускающего участка 64b может открываться к внешней периферийной кромке 70 одного фланца катушки 4. Кроме того, светопропускающий участок может быть не прямым, а криволинейным.
Аналогично, как показано на фиг.30(а), 30(b) и 30(с), светопропускающий участок 64с может проходить к центру катушки 64. В этом случае, как показано на этих чертежах, конец светопропускающего участка 64с может открываться во внутреннюю трубку 40 катушки, или может быть изогнут.
Дополнительно, соответствующие светопропускающие участки 64d, как показано на фиг.31, могут иметь конфигурацию, в которой отверстие 72, выполненное в катушке, закрыто светопропускающим материалом 73.
Количество светопропускающих участков является количеством участков, через которые свет проходит от светоизлучающего элемента к светопринимающему элементу. Как показано на фиг.32, даже если три светопропускающих участка 64e соединены соединительными участками 74 на участках, за исключением участков 71, через который свет передается от светоизлучающего элемента к светопринимающему элементу так, что они выглядят как один, этих светопропускающих участков все же три, а не один.
Хотя выше было приведено описание конкретного иллюстративного варианта настоящего изобретения, специалистам понятно, что в него могут быть внесены многочисленные изменения и дополнения, не выходящие за рамки объема настоящего изобретения. Поэтому все такие изменения и дополнения, входящие в рамки изобретательской идеи, охвачены приложенной формулой изобретения.
Промышленная применимость
Изобретение может быть применено к катушке для проволоки, машине для обвязки арматуры и к способу определения информации о вращении.
Реферат
Изобретение относится к машиностроению и может быть использовано для связки арматурных стержней. Катушка для проволоки съемно установлена в камеру корпуса машины для обвязки арматуры. Катушка содержит цилиндрический участок втулки, на который намотана проволока, и пару параллельных фланцев, проходящих наружу от обоих наружных концов втулки. В боковой стенке внутри втулки выполнены светопропускающие участки, пропускающие свет от передающего фотодатчика, установленного в корпусемашины для обвязки арматуры. Между парой параллельных фланцев в боковой стенке расположено множество областей для определения информации, выполненных с по меньшей мере одним светопропускающим участком. Количество указанных участков, выполненных в разных областях для определения информации, различно. Обеспечивается возможность определения типа проволоки или величины подачи проволоки. 13 з.п. ф-лы, 39 ил.
Формула
цилиндрический участок (43) втулки, выполненный с возможностью обеспечения наматывания проволоки на него;
пару параллельных фланцев (44, 45), проходящих наружу от обоих радиально внешних осевых концов участка (43) втулки;
боковую стенку (60), проходящую радиально внутри участка (43) втулки и между парой параллельных фланцев и пересекающуюся с осевым направлением катушки (4) для проволоки,
множество светопропускающих участков (64, 64a, 64b, 64c, 64d, 64e), выполненных между парой параллельных фланцев (44, 45) и радиально внутри участка (43) втулки в боковой стенке (60) и пропускающих свет через них внутрь участка (43) втулки,
множество областей (S1, S2) для определения информации, которые обнаруживаются и выполнены в боковой стенке (60) между парой параллельных фланцев (44, 45),
при этом множество областей (S1, S2) для определения информации выполнены с по меньшей мере одним светопропускающим участком (64, 64a, 64b, 64c, 64d, 64e), и
количество светопропускающих участков (64, 64a, 64b, 64c, 64d, 64e), выполненных на одной из областей (S1) для определения информации, отличается от количества светопропускающих участков (64, 64a, 64b, 64c, 64d, 64e), выполненных на другой из областей (S1) для определения информации.
при этом светопропускающие участки (64, 64a, 64b, 64c, 64d, 64e) пропускают свет от светоизлучающего элемента (27) передающего фотодатчика (26), установленного в корпусе (2) машины, когда катушка (4) установлена в камере (3),
причем каждый светопропускающий участок (64, 64a, 64b, 64c, 64d, 64e) имеет сечение, в котором сторона светоизлучающего элемента (27) выполнена более узкой, чем сторона светопринимающего элемента (28), а
между каждым из светопропускающих участков (64, 64a, 64b, 64c, 64d, 64e) и внешней поверхностью внутренней трубки (40) образован зазор для предотвращения отражения света, излучаемого светоизлучающим элементом (27), от внешней поверхности внутренней трубки (40) и его прохождения через светопропускающие участки (64, 64a, 64b, 64c, 64d, 64e).
Документы, цитированные в отчёте о поиске
Машина для скрепления арматуры и барабан, используемый в такой машине
Комментарии