Способ движения робота-уборщика (варианты) - RU2308214C1
Код документа: RU2308214C1
Чертежи



Описание
Настоящее изобретение относится к способу движения робота-уборщика, более конкретно, к способу движения робота-уборщика или робота-пылесоса, при котором можно разделить пространство, подлежащее очистке, на одну или более ячеек, задать маршруты движения, по которым робот-уборщик будет двигаться в соответствующих отдельных ячейках и очищать соответствующие отдельные ячейки по порядку.
В общем случае робот-уборщик является чистящим устройством, содержащим микрокомпьютер, в котором реализуют способ движения робота-уборщика. Данный микрокомпьютер управляет механическим приводом робота-уборщика так, чтобы робот-уборщик выполнял операцию очистки, которая предназначена для очистки пространства при движении робота-уборщика.
Обычные способы движения робота-уборщика классифицируют на способ зигзагообразного движения робота-уборщика и способ движения робота-уборщика по спирали.
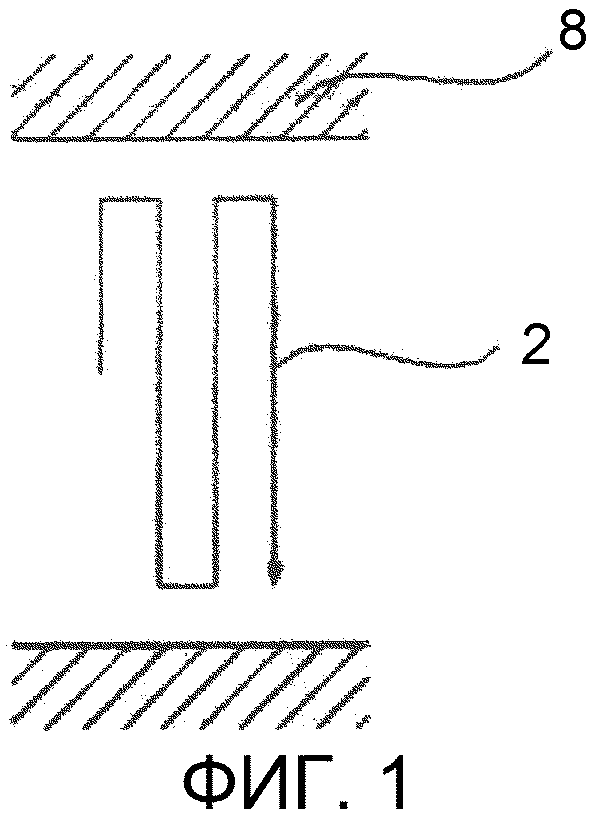
Фиг.1 и 2 показывают обычные способы движения робота-уборщика, причем фиг.1 - изображение, иллюстрирующее способ зигзагообразного движения робота-уборщика, и фиг.2 - изображение, иллюстрирующее способ движения робота-уборщика по спирали.
Как показано на фиг.1, способ зигзагообразного движения робота-уборщика, которое обозначено ссылочной позицией 2, содержит первый этап движения, состоящий из движения робота-уборщика по прямому маршруту движения до тех пор, пока робот-уборщик не натолкнется на преграду 8; и второй этап движения, состоящий из поворота робота-уборщика в перпендикулярном направлении относительно направления, в котором робот-уборщик двигался на первом этапе движения, когда робот-уборщик натолкнулся на преграду 8, движения робота-уборщика вдоль преграды 8 на заданное расстояние от маршрута движения первого этапа движения и поворота робота-уборщика в направлении, противоположном направлению, в котором робот-уборщик двигался на первом этапе движения. Первый и второй этапы движения выполняют поочередно.
Как показано на фиг.2, способ движения робота-уборщика по спирали является способом движения робота-уборщика по спиральному маршруту движения, радиус поворота которого постепенно увеличивается, когда робот-уборщик движется при повороте.
Однако при обычном способе зигзагообразного движения робота-уборщика, когда одна часть очищаемого пространства очищена, т.е. когда операция движения робота-уборщика начинается в центре очищаемого пространства, и очищаемое пространство делится на две части посредством операции движения робота-уборщика, или очищаемое пространство делится на две части посредством операции движения робота-уборщика на первом этапе движения из-за преграды, присутствующей в очищаемом пространстве, требуется, чтобы робот-уборщик возвращался к начальной точке операции движения для очистки другой части очищаемого пространства. В результате операция движения робота-уборщика повторяется лишний раз. Кроме того, способ зигзагообразного движения робота-уборщика не изменяется в соответствии с продвижением операции по очистке. Следовательно, трудно определять, когда робот-уборщик заканчивает операцию по очистке.
При обычном способе движения робота-уборщика по спирали, когда робот-уборщик наталкивается на преграду, робот-уборщик движется по другому спиральному маршруту, направление спирали которого противоположно направлению спирали начального спирального маршрута, для того чтобы объехать преграду. В результате радиус поворота спирального маршрута, который постепенно увеличивается при движении робота-уборщика, после того, как направление робота-уборщика изменилось, отличается от радиуса поворота спирального маршрута, который постепенно увеличивается при движении робота-уборщика до того как направление робота-уборщика изменилось. Следовательно, очищаемое пространство очищается не полностью, и поэтому эффективность очистки с помощью робота-уборщика уменьшается.
Поэтому настоящее изобретение было создано для преодоления вышеизложенных проблем, и задачей настоящего изобретения является создание способа движения робота-уборщика, при котором можно разделять пространство, подлежащее очистке, на одну или более количество ячеек, которые имеют небольшую площадь, устанавливать порядок очистки, при котором очищаемое пространство очищают по-ячейно, т.е. ячейка за ячейкой, и управлять движением робота-уборщика так, чтобы операция по очистке с помощью робота-уборщика выполнялась таким образом, чтобы эффективность очистки с помощью робота-уборщика не зависела от преграды, сокращались ненужные операции движения робота-уборщика и можно было предсказать завершение операции очистки с помощью робота-уборщика.
Такая задача была решена за счет создания способа движения робота-уборщика, при котором согласно изобретению осуществляют по меньшей мере один этап установки пространства, подлежащего очистке, и разделения установленного пространства на одну или более ячеек; по меньшей мере один этап очистки, предназначенный для соответствующих ячеек, состоящих из движения робота-уборщика для очистки предназначенных ячеек; и по меньшей мере один этап поворота, состоящий из движения робота-уборщика к следующей ячейке, подлежащей очистке, так чтобы установленное пространство очищалось ячейка за ячейкой.
Предпочтительно, этапы поворота осуществляют после того как закончены соответствующие этапы очистки или соответствующие этапы установки.
Предпочтительно, установленное пространство очищают ячейка за ячейкой по направлению спирали.
Предпочтительно, соответствующие этапы установки осуществляют одновременно с осуществлением этапов очистки или этапов поворота так, чтобы соответствующие этапы установки реализовывались посредством ограничения пространства, в котором робот-уборщик движется на этапах очистки, чтобы оно было частью пространства, подлежащего очистке.
Предпочтительно, этапы установки повторно выполняют после того, как закончены этапы очистки, и этапы установки повторно выполняют так, чтобы пространство, подлежащее очистке, задавалось, исключая уже очищенное пространство.
Предпочтительно, робота-уборщика размещают в пространстве вблизи ячеек, которые подлежат очистке следующими, когда по меньшей мере некоторые из этапов очистки закончены так, чтобы робот-уборщик не должен двигаться на соответствующих этапах поворота.
Предпочтительно, по меньшей мере некоторые из этапов очистки имеют аналогичные маршруты движения.
Предпочтительно, каждая из ячеек имеет форму прямоугольника или квадрата.
Предпочтительно, каждый из по меньшей мере некоторых этапов очистки включает в себя один или более этапов движения робота-уборщика по зигзагообразному маршруту, включающему в себя множество первых маршрутов, расположенных параллельно друг другу на заданном расстоянии, так чтобы очищаемые пространства не перекрывались друг с другом, при этом внутренняя область каждой из ячеек, предназначенных для соответствующих этапов очистки, полностью очищена; и множество вторых маршрутов, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Предпочтительно, робот-уборщик движется зигзагообразно во внутренней области каждой из ячеек, предназначенных по меньшей мере для некоторых из этапов очистки, соответственно.
Предпочтительно, каждый из по меньшей мере некоторых этапов очистки включает в себя один или более этапов движения, состоящих из движения робота-уборщика по зигзагообразному маршруту, включающему в себя множество первых маршрутов, расположенных параллельно друг другу на заданном расстоянии так, чтобы очищаемые пространства не перекрывались друг с другом, при этом внутренняя область каждой из ячеек, предназначенных для соответствующих этапов очистки, полностью очищена; и множество вторых маршрутов, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Предпочтительно, каждый из по меньшей мере некоторых этапов очистки включает в себя один или более этапов движения, состоящих из движения робота-уборщика по зигзагообразному маршруту, включающему в себя множество первых маршрутов, расположенных параллельно друг другу на заданном расстоянии так, чтобы очищаемые пространства не перекрывались друг с другом, при этом внутренняя область каждой из ячеек, предназначенных для соответствующих этапов очистки, полностью очищена; и множество вторых маршрутов, соединяющих между собой смежные первые маршруты на минимальном расстоянии, так чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Указанная техническая задача также решается за счет того, что в способе движения робота-уборщика согласно изобретению осуществляют по меньшей мере один этап установки пространства, подлежащего очистке, и разделения установленного пространства на одну или более количество ячеек; по меньшей мере один этап очистки, предназначенный для соответствующих ячеек, состоящих из движения робота-уборщика для очистки соответствующих ячеек; по меньшей мере один этап поворота, состоящий из движения робота-уборщика к следующей ячейке, которая подлежит очистке, так чтобы установленное пространство очищалось ячейка за ячейкой; этап обнаружения преград, состоящий из обнаружения преграды, когда робот-уборщик движется во время выполнения этапов очистки или этапов поворота; и этап объезда преграды для обеспечения возможности роботу-уборщику объезжать преграду, обнаруженную на этапе обнаружения преграды, когда робот-уборщик движется.
Предпочтительно, установленное пространство очищают ячейка за ячейкой по направлению спирали.
Предпочтительно, этапы поворота выполняют после того, как закончены соответствующие этапы очистки или соответствующие этапы установки.
Предпочтительно, соответствующие этапы установки выполняют одновременно с выполнением этапов очистки или этапов поворота так, чтобы соответствующие этапы установки реализовывались посредством ограничения пространства, в котором робот-уборщик движется на этапах очистки, чтобы оно было частью пространства, подлежащего очистке.
Предпочтительно, этапы установки повторно выполняют после того, как закончены этапы очистки, и этапы установки повторно выполняют так, чтобы пространство, подлежащее очистке, задавалось, исключая уже очищенное пространство.
Предпочтительно, робота-уборщика размещают вблизи ячеек, которые подлежат очистке следующими, когда по меньшей мере некоторые из этапов очистки закончены, так, чтобы робот-уборщик не должен двигаться на соответствующих этапах поворота.
Предпочтительно, по меньшей мере некоторые из этапов очистки имеют аналогичные маршруты движения.
Предпочтительно, каждая из ячеек имеет форму прямоугольника или квадрата.
Предпочтительно, робот-уборщик движется зигзагообразно во внутренней области каждой из ячеек, предназначенных по меньшей мере для некоторых из этапов очистки, соответственно.
Предпочтительно, каждый из по меньшей мере некоторых этапов очистки включает в себя один или более этапов движения, состоящих из движения робота-уборщика по зигзагообразному маршруту, включающему в себя множество первых маршрутов, расположенных параллельно друг другу на заданном расстоянии так, чтобы очищаемые пространства не перекрывались друг с другом, при этом внутренняя область каждой из ячеек, предназначенных для соответствующих этапов очистки, полностью очищена; и множество вторых маршрутов, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Согласно настоящему изобретению, очищаемое пространство делят на одну или более ячеек и выполняют операции движения робота-уборщика, подходящие для очистки данных ячеек. Следовательно, настоящее изобретение имеет эффект улучшения эффективности очистки ячеек и таким образом улучшения эффективности очистки всего очищаемого пространства.
Кроме того, операции по очистке выполняют по-ячейно по направлению спирали. Следовательно, настоящее изобретение имеет эффект предоставления возможности пользователю или микрокомпьютеру, установленному в роботе-уборщике, легко отслеживать ход выполнения операций по очистке и окончание операции по очистке и задавать изменение способа очистки в соответствии сходом выполнения операций по очистке, что включает отслеживание уровня заряда батареи.
Так как операции по очистке выполняют ячейка за ячейкой по направлению спирали, как описано выше, невозможно делить очищаемое пространство на две части. Следовательно, настоящее изобретение имеет эффект сокращения ненужных операций движения робота-уборщика.
Кроме того, операции по очистке выполняют по-ячейно, когда робот-уборщик объезжает преграду. Следовательно, настоящее изобретение имеет эффект улучшения эффективности очистки с помощью робота-уборщика.
Указанные выше и другие задачи, особенности и преимущества настоящего изобретения будут более понятны из последующего подробного описания при его рассмотрении вместе с прилагаемыми чертежами, на которых:
фиг.1 и 2 - иллюстрации обычных способов движения робота-уборщика, причем
фиг.1 - изображение, иллюстрирующее способ зигзагообразного движения робота-уборщика,
фиг.2 - изображение, иллюстрирующее способ движения робота-уборщика по спирали;
фиг.3-9 - иллюстрации способа движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения, причем
фиг.3 - изображение, иллюстрирующее воплощение способа движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения,
фиг.4 - изображение, иллюстрирующее маршрут движения на первом этапе очистки,
фиг.5 - изображение, иллюстрирующее маршрут движения на втором этапе очистки,
фиг.6 - изображение, иллюстрирующее маршрут движения на третьем этапе очистки,
фиг.7 - изображение, иллюстрирующее маршрут движения на четвертом этапе очистки,
фиг.8 - изображение, иллюстрирующее маршрут движения на пятом этапе очистки,
фиг.9 - изображение, иллюстрирующее этапы поворота способа движения робота-уборщика;
фиг.10 и 11 - иллюстрации способа движения робота-уборщика согласно второму предпочтительному варианту осуществления настоящего изобретения, причем
фиг.10 - изображение, иллюстрирующее воплощение способа движения робота-уборщика согласно второму предпочтительному варианту осуществления настоящего изобретения,
фиг.11 - изображение, иллюстрирующее маршрут движения на шестом этапе очистки;
фиг.12 - изображение, иллюстрирующее способ движения робота-уборщика согласно третьему предпочтительному варианту осуществления настоящего изобретения;
фиг.13 - изображение, иллюстрирующее способ движения робота-уборщика согласно четвертому предпочтительному варианту осуществления настоящего изобретения.
Теперь будут подробно описаны показанные на сопроводительных чертежах предпочтительные варианты осуществления настоящего изобретения.
Фиг.3-8 показывают способ движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения, причем фиг.3 - изображение, иллюстрирующее воплощение способа движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения, фиг.4 - изображение, иллюстрирующее маршрут движения на первом этапе очистки, фиг.5 - изображение, иллюстрирующее маршрут движения на втором этапе очистки, фиг.6 - изображение, иллюстрирующее маршрут движения на третьем этапе очистки, фиг.7 - изображение, иллюстрирующее маршрут движения на четвертом этапе очистки, фиг.8 - изображение, иллюстрирующее маршрут движения на пятом этапе очистки.
Как показано на фиг.3, способ движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения включает в себя один или более этапов установки, состоящих из задания или установки пространства, подлежащего очистке, и разделения такого установленного пространства на одну или более ячеек 52; один или более этапов очистки, которые предназначены для соответствующих ячеек 52, состоящих из движения робота-уборщика для очистки предназначенных ячеек 52, так, чтобы направления движения робота-уборщика были перпендикулярны друг другу в некоторых из предназначенных ячеек 52; и один или более этапов поворота, которые выполняют после завершения этапов очистки или этапов установки, состоящих из движения робота-уборщика к следующей ячейке, которая будет очищаться, в которой выполняют один из этапов очистки, предназначенных для ячейки, так, чтобы пространство, подлежащее очистке, очищалось по направлению спирали 56 по всем ячейкам 52.
Предпочтительно, этапы установки выполняют после этапа инициализации, состоящего из движения робота-уборщика вдоль стены для подготовки карты пространства, подлежащего очистке, или для прогнозирования расположения преграды с помощью устройства обнаружения преград. Однако этапы установки можно выполнять при движении робота-уборщика, не выполняя этап инициализации.
Предпочтительно, этапы установки выполняют непосредственно в соответствии с алгоритмом, дополнительно подготовленным для выполнения этапов оценки. Однако этапы установки можно выполнять опосредованно через этапы очистки или этапы поворота. Например, если пространство, в котором движется робот-уборщик, ограничено на соответствующих этапах очистки, то ячейки 52, которые затем должны очищаться, оценивают на соответствующих этапах поворота, и информацию о ячейках 52 передают соответствующим этапам очистки, которые будут затем выполняться.
На этапах установки форму и размеры ячеек 52 и пространства, подлежащего очистке, устанавливают так, чтобы операции движения и очистки эффективно выполнялись, на основании площади и карты очищаемого пространства, расположения преграды или другой информации, которая предварительно задана, которой управляет пользователь или которую получают на этапе инициализации. Однако можно выполнять этапы установки без описанной выше информации.
Кроме того, соответствующий этап установки может повторно выполняться после того как закончены этапы очистки. Когда этап установки выполняют повторно, предпочтительно, чтобы пространство, подлежащее очистке, задавалось, исключая очищенное пространство, и затем делилось на одну или более количество ячеек 52.
Более конкретно, этапы установки могут выполняться только один раз, они могут дополнительно выполняться при необходимости или могут выполняться всякий раз, когда заканчивается один из этапов очистки.
Предпочтительно, чтобы на соответствующих этапах установки форму и размеры ячеек 52 соответственно устанавливали так, чтобы операции движения и очистки эффективно выполнялись, когда сохранена информация о площади и карте очищаемого пространства, о расположении преграды или другая информация, необходимая для движения робота-уборщика.
На соответствующих этапах установки ячейки 52 устанавливают в форме прямоугольника или квадрата. Однако можно устанавливать ячейки 52 в форме треугольника, ромба или многоугольника, например шестиугольника.
Форму ячеек 52 устанавливают подобными друг другу, так, чтобы тот же самый алгоритм использовался для очистки соответствующих ячеек 52. Однако можно по-разному устанавливать размеры и форму некоторых из ячеек 52 с учетом очищаемого пространства, преграды и размера робота-уборщика.
Кроме того, ячейки 52 предпочтительно устанавливают так, чтобы размеры ячеек 52 были не настолько малыми или узкими, когда соответствующие ячейки 52 полностью очищаются, даже когда робот-уборщик просто движется по прямой линии, или направление движения робота-уборщика немного изменяется. Другими словами, предпочтительно устанавливать размеры ячеек 52 так, чтобы ячейки 52 полностью очищались после того, как некоторые из операций движения выполнялись в перпендикулярных друг другу направлениях на соответствующих этапах очистки.
Также предпочтительно соответствующие ячейки 52 устанавливать так, чтобы размеры ячеек 52 были меньше размеров пространства, подлежащего очистке, и поэтому операции по очистке выполнялись по-ячейно, или ячейка за ячейкой.
После того, как закончены соответствующие этапы установки, выполняют этапы поворота. Этапы поворота, которые выполняют непосредственно после завершения этапов установки, конфигурируют так, чтобы был задан порядок очистки ячеек 52. Однако этапы поворота можно конфигурировать так, чтобы ячейки, которые затем будут очищаться, задавались всякий раз, когда выполняют соответствующие этапы поворота.
Соответствующие этапы поворота выполняют всякий раз, когда закончены соответствующие этапы установки или соответствующие этапы очистки. Например, выполняют этапы очистки, предназначенные для ячеек, которые будут очищаться, и затем последовательно выполняют соответствующие этапы поворота.
Направление 56 спирали конфигурируют так, чтобы робот-уборщик двигался через ячейки С2 - С9 от первой ячейки С1 против часовой стрелки. Как вариант, направление 56 спирали можно конфигурировать так, чтобы робот-уборщик двигался через ячейки С2 - С9 от первой ячейки С1 по часовой стрелке.
Предпочтительно, первую ячейку С1 устанавливают так, чтобы первая ячейка С1 была расположена в центре сохраненного очищаемого пространства.
На соответствующих этапах очистки робот-уборщик движется в различных режимах движения, таких как режим движения по спирали, зигзагообразный режим движения и случайный режим движения. Предпочтительно, чтобы на соответствующих этапах очистки ячейки 52, предназначенные для соответствующих этапов очистки, были полностью очищены, в то время как маршруты движения перекрывались минимально.
Соответствующие этапы очистки имеют маршруты движения, в соответствии с которыми после завершения соответствующих этапов очистки робот-уборщик располагается рядом с ячейками, которые будут очищаться. Следовательно, завершение и выполнение соответствующих этапов очистки выполняют без движения робота-уборщика на соответствующих этапах поворота.
Соответствующие этапы очистки конфигурируют так, что соответствующие этапы очистки имеют тот же самый маршрут движения или подобные маршруты движения, и поэтому используется тот же самый алгоритм движения. Однако соответствующие этапы очистки можно конфигурироваться так, чтобы соответствующие этапы очистки имели различные маршруты движения с учетом формы ячеек 52, предназначенных для соответствующих этапов очистки, расположения преграды в соответствующих ячейках 52 и расположения ячеек 52, предназначенных для предыдущего этапа очистки и последующего этапа очистки.
Этап обнаружения преград может выполняться для обнаружения преграды, когда робот-уборщик движется во время выполнения этапа инициализации, этапов поворота или этапов очистки.
Когда на этапе обнаружения преграды обнаружена преграда, из-за которой нарушена операция движения робота-уборщика, этап объезда преграды предпочтительно выполняют так, чтобы робот-уборщик двигался во время объезда преграды.
Предпочтительно, информацию с этапа объезда преграды передают на этап инициализации, на соответствующие этапы поворота или на соответствующие этапы очистки, или она изменяет продвижение этапа инициализации, соответствующих этапов поворота или соответствующих этапов очистки так, чтобы этап инициализации, соответствующие этапы поворота или соответствующие этапы очистки выполнялись с учетом преграды.
Предпочтительно, на этапе объезда преграды также принимают информацию о маршрутах движения от этапа инициализации, соответствующих этапов поворота или соответствующих этапов очистки, и затем его непосредственно выполняют согласно дополнительному предварительно установленному алгоритму. Однако возможно, что этап объезда преграды изменяет маршруты движения этапа инициализации, соответствующих этапов поворота или соответствующих этапов очистки, и его затем выполняют опосредованно через этап инициализации, соответствующие этапы поворота или соответствующие этапы очистки.
Предпочтительно, робот-уборщик, в котором используют описанный выше способ движения робота-уборщика, содержит корпус, образующий контуры основного блока; узел очистки, установленный в основном блоке, предназначенный для очистки очищаемого пространства; узел привода для приведения в движение основного блока при поддержке основного блока; узел управления движением, связанный с узлом привода, предназначенный для управления движением, остановкой и изменением направления движения основного блока; узел измерения движения, частично установленный в основном блоке, предназначенный для измерения расположения, пройденного расстояния или направления движения; узел обнаружения преград, установленный по контуру основного блока, предназначенный для обнаружения преград в очищаемом пространстве; узел управления, частично установленный в корпусе, предназначенный для предоставления пользователю интерфейса для управления роботом-уборщиком; блок обработки информации, предназначенный для ввода и вывода информации, для обработки и хранения сигнала для управления узлом управления движением, узлом обнаружения преград и узлом управления или для обмена информацией с узлом управления движением, узлом обнаружения преград и узлом управления; блок питания, предназначенный для распределения электроэнергии, поставляемой из внешнего источника электроэнергии, к узлу очистки, узлу привода, узлу управления движением, узлу обнаружения преград и узлу управления.
Предпочтительно, узел очистки содержит канал для потока, сформированный в основном блоке; вентилятор, установленный в канале, предназначенный для всасывания мусора из очищаемого пространства; узел щетки, установленный на входном отверстии канала для потока, предназначенный для приложения усилия к мусору, чтобы помочь работе вентилятора при всасывании; фильтр, установленный в канале, предназначенный для фильтрации мусора, чтобы препятствовать попаданию мусора в вентилятор или чтобы препятствовать тому, чтобы мусор выпадал из канала; и пылесборник, расположенный в канале, предназначенный для сбора всасываемого мусора.
Предпочтительно, узел привода содержит два или более основных колес, расположенных с возможностью вращения, соответственно, на правой и левой сторонах нижней части основного блока, предназначенных для перемещения основного блока, для опоры основного блока; два или более двигателей для колес, расположенных соответственно на правой и левой сторонах основного блока, которые связаны с основными колесами, предназначенных для вращения основных колес в заданном диапазоне скорости вращения по часовой стрелке или против часовой стрелки, соответственно; и самоориентирующееся колесо, расположенное в нижней части основного блока, предназначенное для поддержания основного блока, причем самоориентирующееся колесо вращается во всех направлениях, в которых может перемещаться основной блок.
Узел управления движением приводит в движение или останавливает соответствующие двигатели колес, согласно сигналу, принимаемому от блока обработки информации так, чтобы основной блок останавливался, продвигался вперед или назад, или выполнял комбинации этих движений.
Предпочтительно, узел измерения движения содержит гироскопический датчик для обнаружения углов вращения робота-уборщика; и кодер для распознавания маршрута, по которому движется робот-уборщик.
Как вариант, узел измерения движения может содержать передатчик сигнала расположения, жестко закрепленный в очищаемом пространстве, когда он отделен от основного блока, предназначенный для передачи удаленного сигнала, такого как электромагнитный сигнал или звуковой сигнал, во всех направлениях; приемник сигнала расположения, установленный по контуру основного блока, предназначенный для приема удаленного сигнала, передаваемого от передатчика сигнала расположения; и блок обработки сигнала расположения, расположенный в основном блоке, предназначенный для определения расположения и направления движения основного блока, основываясь на сигнале, принятом приемником сигнала расположения.
Предпочтительно, узел обнаружения преград содержит множество ультразвуковых датчиков, световых датчиков или датчиков механического воздействия, установленных во внешней части основного блока, предназначенных для обнаружения стены, которой ограничена граница очищаемого пространства, обрыва, конструкции, расположенной в очищаемом пространстве, или другой преграды, используя звуковые волны, электромагнитные волны или механическое воздействие, применяемые к основному блоку.
Узел управления содержит дисплей, расположенный на корпусе, предназначенный для отображения рабочего состояния робота-уборщика; и кнопки для ввода информации, расположенные рядом с узлом дисплея, предназначенные для предоставления возможности пользователю вводить команды для работы.
Как вариант, узел управления может содержать дисплей, расположенный на корпусе, предназначенный для отображения рабочего состояния робота-уборщика; дистанционный контроллер, включающий в себя часть для ввода информации, расположенный отдельно от основного блока, предназначенный для предоставления возможности пользователю вводить рабочие команды, процессор, предназначенный для обработки введенной в форме сигнала информации, и передающую часть, предназначенную для передачи обработанного сигнала; и приемник, расположенный в корпусе, предназначенный для приема сигнала от дистанционного контроллера.
Блок обработки информации имеет алгоритм, включающий в себя этапы установки, этапы очистки и этапы поворота, для выполнения способа движения робота-уборщика согласно настоящему изобретению.
Предпочтительно, блок обработки информации - микрокомпьютер, содержащий узел ввода-вывода, предназначенный для ввода сигнала от внешнего устройства, связанного с блоком обработки информации, и вывода сигнала на данное внешнее устройство; память для хранения вводимого/выводимого сигнала или обработанного сигнала, или указанного выше алгоритма; микропроцессор для ввода/вывода или обработки сигнала и для управления операциями сохранения в памяти и удаления из памяти; и схему интерфейса, связанную с узлом ввода-вывода, памятью и микропроцессором, предназначенную для предоставления возможности передавать через нее сигнал между узлом ввода-вывода, памятью и микропроцессором.
Предпочтительно блок питания содержит аккумуляторную батарею, выполненную так, что батарея заряжается электроэнергией от внешнего источника электроэнергии; узел зарядки, связанный с внешним источником электроэнергии, предназначенный для заряда батареи электроэнергией от внешнего источника электроэнергии; и узел электропитания, предназначенный для распределения электроэнергии от батареи соответствующим образом к узлу очистки, узлу привода, узлу управления движением, узлу обнаружения преград и узлу управления.
Теперь будет подробно описан способ движения робота-уборщика с помощью указанной выше конструкции согласно первому предпочтительному варианту осуществления настоящего изобретения.
Когда узел управления принимает от пользователя команду начала работы робота-уборщика, узел управления передает данный сигнал на микрокомпьютер.
Когда микрокомпьютер принимает сигнал начала работы робота-уборщика, он выполняет этап инициализации и затем выполняет этапы установки.
После того как микрокомпьютер выполнил этапы установки, микрокомпьютер выполняет основную программу, содержащую этапы поворота и этапы очистки. Если этапы установки должны повторно выполняться, то прерывают основную программу и затем повторно выполняют этапы установки. Впоследствии микрокомпьютер выполняет основную программу, содержащую этапы поворота и этапы очистки, реконфигурированную в соответствии с этапами установки, которые повторно выполняют.
Микрокомпьютер выполняет этапы установки и хранит информацию о заданном пространстве и соответствующих ячейках 52 в памяти микрокомпьютера.
Микрокомпьютер выполняет этапы поворота после того, как закончены соответствующие этапы установки, для фиксации порядка очистки, и затем перемещает робота-уборщика к начальной точке для этапов очистки так, чтобы этапы очистки, предназначенные для ячеек, выполнялись в зафиксированном порядке очистки.
Микрокомпьютер передает сигнал, необходимый узлу управления движением, для приведения в движение робота-уборщика. Когда данный сигнал передают от микрокомпьютера к узлу управления движением, узел управления движением управляет двигателями колес для их приведения. В результате основные колеса вращаются с помощью двигателей для колес, и поэтому робот-уборщик перемещается с помощью основных колес, когда трение возникает между основными колесами и опорной поверхностью очищаемого пространства.
После того как закончен этап поворота, микрокомпьютер выполняет этап очистки, выводя сигнал очистки к узлу очистки и выводя сигнал движения к узлу управления движением.
Когда сигнал очистки выводят к узлу очистки, он запускает вентилятор и узел щетки. Узел щетки прикладывает физическое усилие к мусору в очищаемом пространстве так, чтобы мусор легко всасывался. Мусор на очищаемом пространстве всасывается вместе с воздухом через канал для потока с помощью вентилятора. Всасываемый воздух фильтруют с помощью фильтра так, чтобы мусор отделялся от воздуха, и только воздух удалялся из робота-уборщика через проток. Впоследствии мусор, который был отделен от воздуха с помощью фильтра, собирают в пылесборнике.
Когда соответствующие этапы очистки закончены, операции по очистке ячеек, для которых предназначены соответствующие этапы очистки, закончены. Соответственно, микрокомпьютер выполняет этапы поворота.
Когда микрокомпьютер выводит сигнал начала работы к узлу обнаружения преград, он обнаруживает преграду, когда робот-уборщик движется или останавливается в соответствии с сигналом начала работы.
Узел обнаружения преград передает обнаруженную информацию о преграде, такую как расстояние до преграды и расположение преграды, на микрокомпьютер в форме сигнала. Когда данный сигнал передают на микрокомпьютер, микрокомпьютер сохраняет информацию о преграде или выполняет этап объезда преграды, если определено, что преграда присутствует на пути робота-уборщика.
Микрокомпьютер временно прерывает основную программу, в то время как микрокомпьютер хранит информацию о маршруте движения и преграде, для выполнения этапа объезда преграды. Более конкретно, микрокомпьютер выполняет подпрограмму, в которой воплощен этап объезда преграды. После того как данная подпрограмма закончена, процесс возвращается к основной программе.
Когда микрокомпьютер выполняет подпрограмму, воплощающую этап объезда преграды, микрокомпьютер выводит к узлу управления движением сигнал, чтобы робот-уборщик объезжал преграду. В соответствии с данным сигналом, выводимым от микрокомпьютера, узел управления движением управляет двигателями колес, чтобы они работали так, чтобы робот-уборщик двигался во время объезда преграды роботом-уборщиком.
Тем временем узел измерения движения передает информацию об операции движения робота-уборщика, такую как пройденное расстояние и направление движения робота-уборщика, на микрокомпьютер в форме сигнала. Микрокомпьютер определяет, выполняется ли операция движения робота-уборщика должным образом на этапе поворота, этапе очистки или этапе объезда преграды. В случае необходимости микрокомпьютер выводит сигнал к узлу управления движением так, чтобы операция движения робота-уборщика изменилась. Когда данный сигнал вводят к узлу управления движением, узел управления движением управляет двигателями колес, которые движутся так, что пройденное расстояние или направление движения робота-уборщика изменяются.
Фиг.4 представляет изображение, иллюстрирующее маршрут движения на первом этапе очистки согласно настоящему изобретению.
Как показано на фиг.4, первый этап очистки содержит этап движения, состоящий из движения робота-уборщика по зигзагообразному маршруту 64, включающему в себя четыре первых маршрута, расположенных параллельно друг другу на заданном расстоянии так, чтобы текущее очищаемое пространство не перекрывалось с ранее очищенным пространством, или перекрытие между текущим очищаемым пространством и ранее очищенным пространством было минимальным, в то время как внутренняя область предназначенной ячейки 52 была полностью очищена; и три вторых маршрута, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Предпочтительно, каждый из первых маршрутов формируют в виде прямой линии, которая параллельна правой и левой сторонам предназначенной ячейки 52, и расстояние между одним из первых маршрутов и соседним с ним первым маршрутом была не больше ширины очистки для робота-уборщика.
Ширину очистки для робота-уборщика устанавливают согласно размеру и емкости узла очистки робота-уборщика и хранят в памяти.
Микрокомпьютер выводит сигнал к узлу управления движением, согласно положению, размеру или направлениям сторон ячейки 52, назначенной описанному выше этапу очистки, текущему положению или направлению робота-уборщика, сигналу, который вводится от узла измерения движения, и информации, сохраненной в памяти, так, чтобы робот-уборщик двигался по зигзагообразному маршруту 64.
В соответствии с сигналом, передаваемым к узлу управления движением, узел управления движением управляет двигателями колес, которые установлены в правой и левой сторонах робота-уборщика, чтобы они работали в том же самом направлении и с одинаковой скоростью так, чтобы робот-уборщик продвигался прямо, управляет двигателями колес, чтобы они вращались в противоположных направлениях так, чтобы изменялось только направление робота-уборщика, или управляет только одним из двигателей колес, чтобы они работали так, чтобы робот-уборщик двигался при изменении направления робота-уборщика.
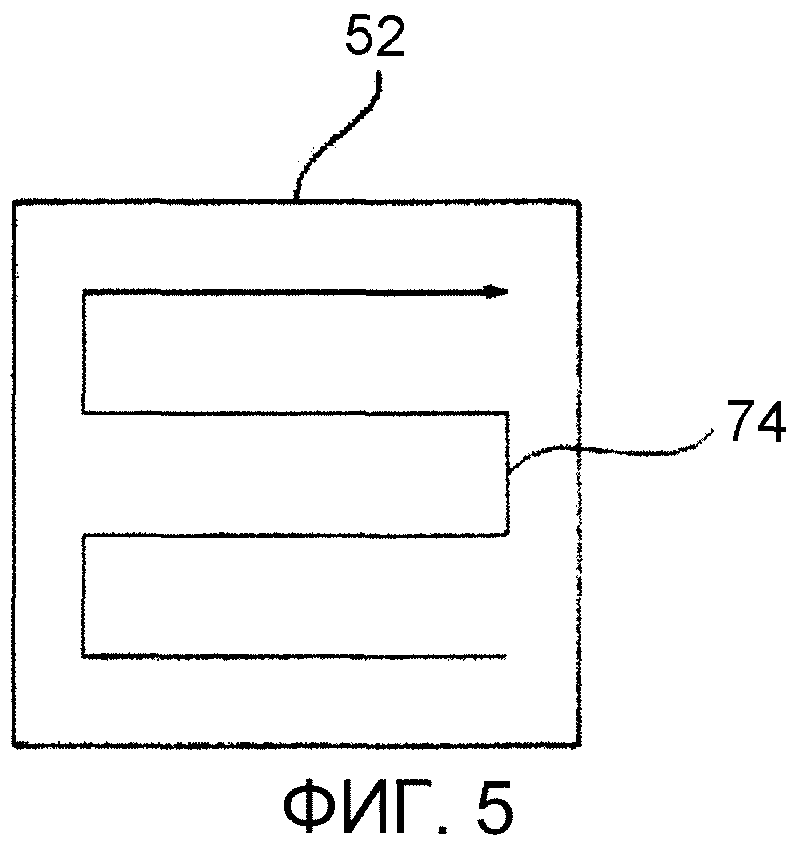
Фиг.5 представляет изображение, иллюстрирующее маршрут движения на втором этапе очистки согласно настоящему изобретению.
Как показано на фиг.5, второй этап очистки идентичен первому этапу очистки за исключением направления маршрута движения.
Более конкретно, второй этап очистки выполняют по зигзагообразному маршруту 74, включающему в себя четыре первых маршрута и три вторых маршрута. Каждый из первых маршрутов - прямая линия, которая параллельна верхней и нижней сторонам назначенной ячейки 52.
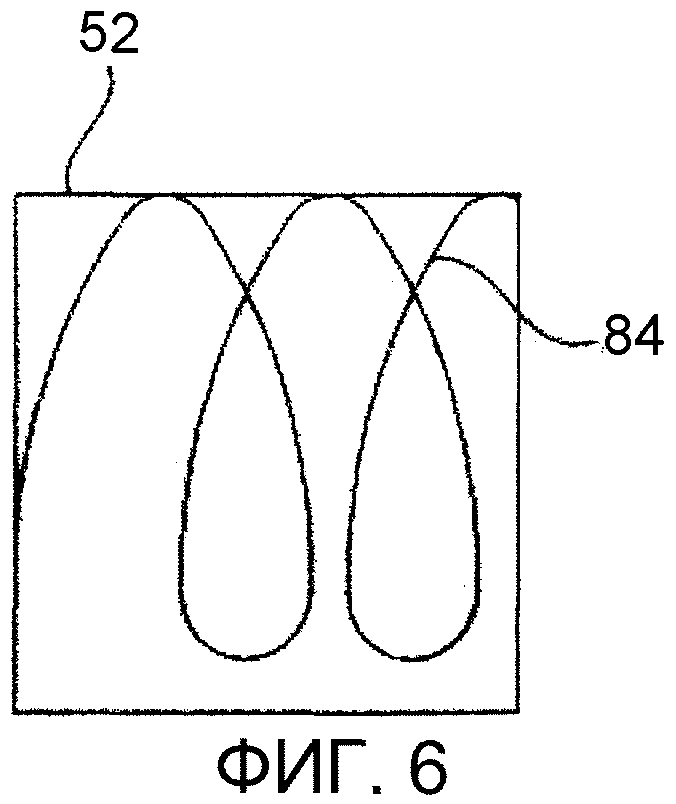
Фиг.6 представляет изображение, иллюстрирующее маршрут движения на третьем этапе очистки согласно настоящему изобретению.
На третьем этапе очистки, как показано на фиг.6, робот-уборщик движется по заданному криволинейному маршруту 84 так, чтобы очистка назначенной ячейки 52 была закончена роботом-уборщиком. Микрокомпьютер передает сигнал к узлу управления движением так, чтобы робот-уборщик двигался по криволинейному маршруту 84. Согласно сигналу, передаваемому к узлу управления движением, узел управления движением управляет двигателями для колес, которые установлены на правой и левой сторонах робота-уборщика, чтобы они работали на различных скоростях. В это время различие между скоростями двигателей колес изменяют, основываясь на изменении в кривизне криволинейного маршрута 84.
Фиг.7 представляет изображение, иллюстрирующее маршрут движения на четвертом этапе очистки согласно настоящему изобретению.
Как показано на фиг.7, четвертый этап очистки является комбинацией первого этапа очистки и второго этапа очистки.
Более конкретно, четвертый этап очистки содержит два этапа движения, состоящих из движения робота-уборщика по зигзагообразному маршруту 94а, включающему в себя четыре первых маршрута, расположенных параллельно друг другу на заданном расстоянии так, чтобы текущее очищаемое пространство не перекрывалось с ранее очищенным пространством, или перекрытие между текущим очищаемым пространством и ранее очищенным пространством было минимальным, тогда как внутренняя область предназначенной ячейки 92 была полностью очищена; и три вторых маршрута, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом. В этом случае первые маршруты одного из этапов движения перпендикулярны первым маршрутам другого этапа движения.
На четвертом этапе очистки этап движения выполняют дважды для очистки внутренней области ячейки 92. Следовательно, внутренняя область ячейки 92 более полно очищается.
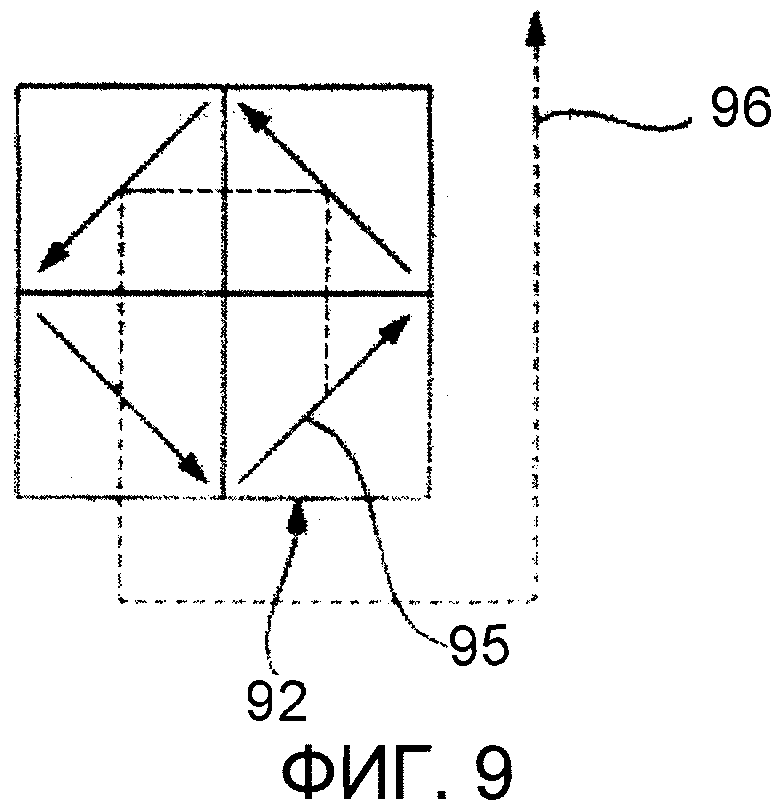
На четвертом этапе очистки операцию движения робота-уборщика начинают с одного из четырех углов ячейки 92 и заканчивают в углу, расположенном по диагонали напротив угла, в котором начинают операцию движения робота-уборщика. Следовательно, четвертый этап очистки имеет направление по стрелке 95, являющейся диагональной линией ячейки 92, и поэтому, как показано на фиг.9, можно легко применять этап поворота в соответствии с тем, что этап очистки конфигурируют так, чтобы операция движения была не нужна на этапе поворота при использовании направления по стрелке 95.
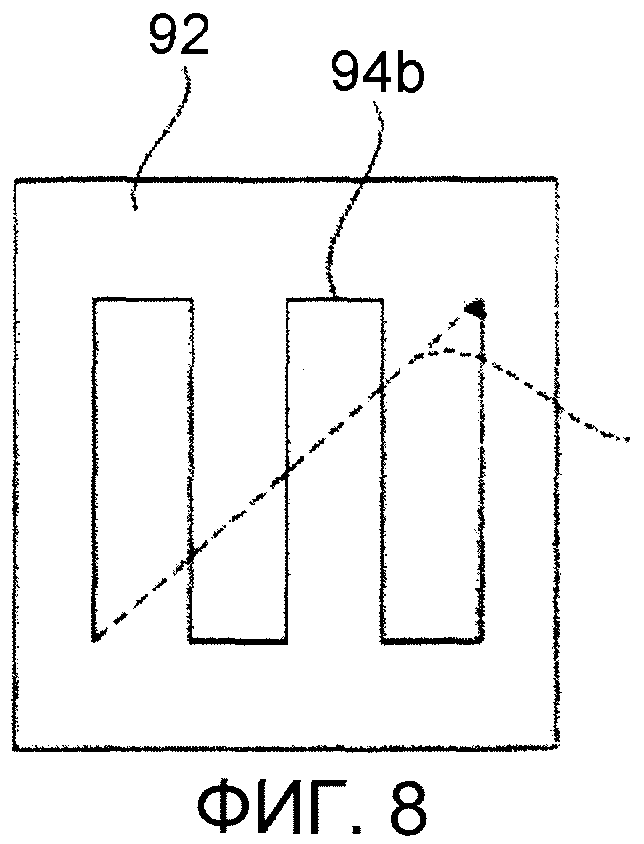
Фиг.8 представляет изображение, иллюстрирующее маршрут движения на пятом этапе очистки согласно настоящему изобретению.
Как показано на фиг.8, пятый этап очистки содержит этап движения, состоящий из движения робота-уборщика по зигзагообразному маршруту 94b, включающему в себя пять первых маршрутов, расположенных параллельно друг другу на заданном расстоянии так, чтобы текущее очищаемое пространство не перекрывалось с ранее очищенным пространством, или перекрытие между текущим очищаемым пространством и ранее очищенным пространством было минимальным, при этом внутренняя область назначенной ячейки 92 полностью очищена; и четыре вторых маршрута, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом.
Пятый этап очистки имеет направление по стрелке 95, являющейся диагональной линией ячейки 92, и поэтому, как показано на фиг.9, можно легко применять этап поворота в соответствии с этапом очистки, сконфигурированным так, чтобы операция движения была не нужна на этапе поворота при использовании направления по стрелке 95.
Фиг.9 представляет изображение, иллюстрирующее этапы поворота способа движения робота-уборщика. Этапы поворота конфигурируют при использовании четвертого этапа очистки и пятого этапа очистки.
На этапах поворота согласно настоящему изобретению, как показано на фиг.9, робот-уборщик располагают рядом с ячейкой, которая будет очищаться следующей, когда операция движения заканчивается на каждом из этапов очистки. На соответствующих этапах очистки робот-уборщик движется по тому же самому маршруту движения, имеющему направление по стрелке 95. Следовательно, операции движения не выполняются на соответствующих этапах поворота. Направление по стрелке 95 размещают по направлению спирали 96 так, чтобы ячейки 92 очищались по направлению спирали 96 в пространстве, подлежащем очистке, и этапы очистки выполнялись по направлению по стрелке 95.
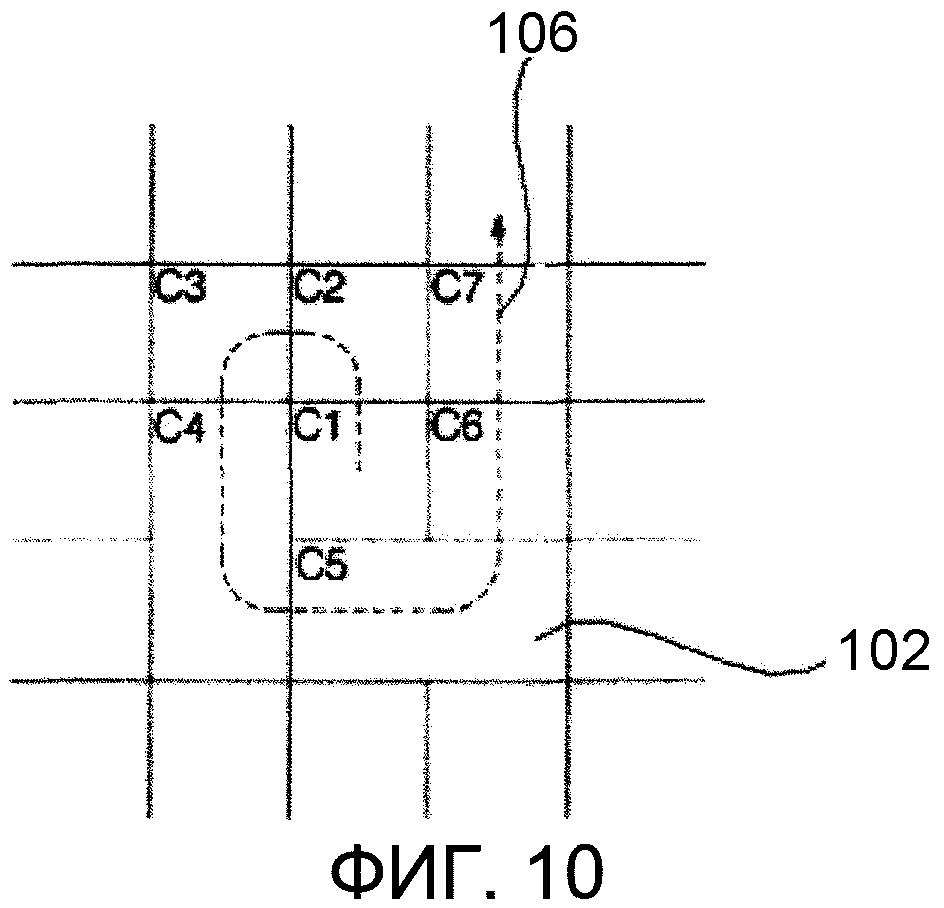
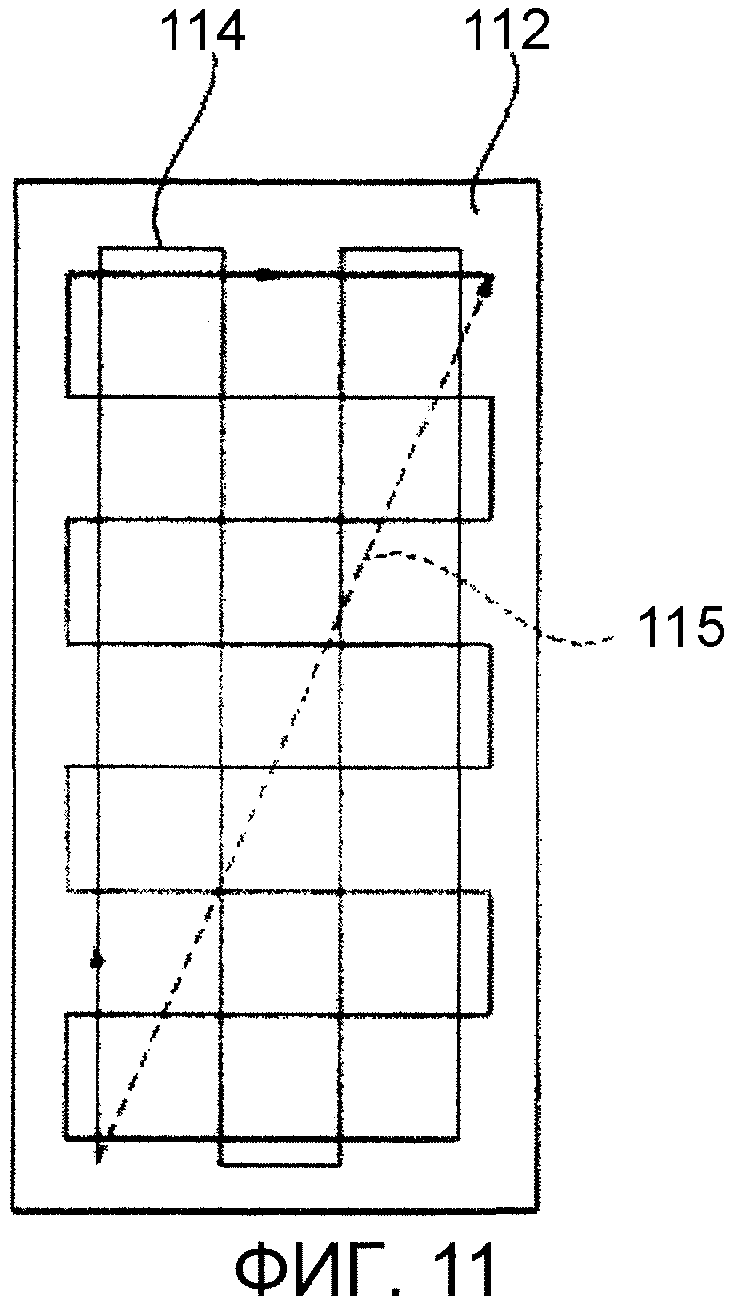
Фиг.10 и 11 показывают способ движения робота-уборщика согласно второму предпочтительному варианту осуществления настоящего изобретения, причем фиг.10 представляет изображение, иллюстрирующее воплощение способа движения робота-уборщика согласно второму предпочтительному варианту осуществления настоящего изобретения, а фиг.11 представляет изображение, иллюстрирующее маршрут движения на шестом этапе очистки.
Как показано на фиг.10, способ движения робота-уборщика согласно второму предпочтительному варианту осуществления настоящего изобретения идентичен способу движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения за исключением того, что форму некоторых из ячеек задают по-другому на этапах установки и изменяют этапы поворота и этапы очистки.
Более конкретно, некоторые из ячеек, такие как ячейки С1, С2, С3, С6 и С7, имеют форму квадрата, а оставшиеся ячейки, такие как ячейки С4 и С5, имеют форму прямоугольника, имеющего размер и форму, полученные из объединения двух квадратов.
Этапы поворота конфигурируют с учетом размеров и направлений квадратных ячеек С1, С2, С3, С6 и С7 и прямоугольных ячеек С4 и С5.
Этапы очистки, назначенные квадратным ячейкам С1, С2, С3, С6 и С7, конфигурируют так, что используется тот же самый алгоритм движения, и поэтому робот-уборщик движется по тому же самому маршруту движения или по подобным маршрутам движения. Кроме того, этапы очистки, предназначенные для прямоугольных ячеек С4 и С5, конфигурируют так, что используется тот же самый алгоритм движения, и поэтому робот-уборщик движется по тому же самому маршруту движения или по подобным маршрутам движения. Однако маршруты движения на этапах очистки, предназначенных для квадратных ячеек С1, С2, С3, С6 и С7, отличаются от маршрутов движения на этапах очистки, предназначенных для прямоугольных ячеек С4 и С5.
Как показано на фиг.11, этап очистки, предназначенный для каждой из прямоугольных ячеек С4 и С5 (см. фиг.10), содержит два этапа движения, состоящих из движения робота-уборщика по зигзагообразному маршруту, включающему в себя множество первых маршрутов, расположенных параллельно друг другу на заданных расстояниях так, чтобы текущее очищаемое пространство не перекрывалось с ранее очищенным пространством, или перекрытие между текущим очищаемым пространством и ранее очищенным пространством было минимальным, при этом внутренняя область каждой из предназначенных прямоугольных ячеек С4 и С5 полностью очищена; и множество вторых маршрутов, соединяющих между собой смежные первые маршруты на минимальном расстоянии так, чтобы робот-уборщик непрерывно двигался по первым маршрутам, при этом первые маршруты не перекрываются друг с другом. В этом случае первые маршруты одного из этапов движения перпендикулярны первым маршрутам другого этапа движения.
Один из этапов движения, который выполняют сначала, конфигурируют так, чтобы робот-уборщик двигался по зигзагообразному маршруту в продольном направлении, т.е. по зигзагообразному маршруту, включающему в себя четыре первых маршрута и три вторых маршрута, которые параллельны длинным сторонам каждой из прямоугольных ячеек С4 и С5, и другой этап движения, который последовательно выполняют, конфигурируют так, чтобы робот-уборщик двигался по зигзагообразному маршруту в боковом направлении, т.е. по зигзагообразному маршруту, включающему в себя восемь первых маршрутов и семь вторых маршрутов, которые параллельны коротким сторонам каждой из прямоугольных ячеек С4 и С5. Как вариант, этапы движения могут конфигурироваться так, чтобы робот-уборщик двигался по зигзагообразному маршруту в боковом направлении и затем двигался по зигзагообразному маршруту в продольном направлении.
На этапе очистки этап движения выполняют дважды для очистки внутренней области каждой из прямоугольных ячеек С4 и С5. Следовательно, внутренняя область каждой из прямоугольных ячеек С4 и С5 очищается более полно.
На этапе очистки операцию движения робота-уборщика начинают с одного из четырех углов каждой из прямоугольных ячеек С4 и С5 и заканчивают в углу, расположенному по диагонали напротив угла, в котором начинают операцию движения робота-уборщика. Следовательно, этап очистки имеет направление по стрелке 115, являющейся диагональной линией каждой из прямоугольных ячеек С4 и С5, и поэтому можно легко применять этап поворота в соответствии с этапом очистки, сконфигурированным так, чтобы операция движения была не нужна на этапе поворота при использовании направления по стрелке 95.
Фиг.12 представляет изображение, иллюстрирующее способ движения робота-уборщика согласно третьему предпочтительному варианту осуществления настоящего изобретения.
Как показано на фиг.12, способ движения робота-уборщика согласно третьему предпочтительному варианту осуществления настоящего изобретения в основном идентичен способу движения робота-уборщика согласно первому предпочтительному варианту осуществления настоящего изобретения за исключением этапов поворота.
На этапах поворота первую ячейку С1 не устанавливают так, чтобы она находилась в центре хранящегося в памяти очищаемого пространства. Ячейку, соответствующую месту, в котором в данный момент времени размещается робот-уборщик, устанавливают в качестве первой ячейки С1.
Описанная выше конфигурация предпочтительна, когда этапы установки выполняют, не выполняя этап инициализации, например не создавая карту очищаемого пространства с помощью робота-уборщика или когда информацию об очищаемом пространстве не сохраняют в памяти.
Этапы поворота конфигурируют так, чтобы ячейки очищались по направлению спирали 126. Однако на некоторых из этапов очистки и на некоторых из этапов поворота этап объезда преграды выполняют из-за преграды 128, такой как стена, которой ограничено очищаемое пространство. Следовательно, некоторые из ячеек, такие как ячейки С5 - С10 и С16, не очищают, когда выполняют соответствующие этапы объезда преграды, а другие ячейки, такие как ячейки С1 - С4 и С11 - С15, очищают в направлении спирали.
Фиг.13 представляет изображение, иллюстрирующее способ движения робота-уборщика согласно четвертому предпочтительному варианту осуществления настоящего изобретения.
Как показано на фиг.13, способ движения робота-уборщика согласно четвертому предпочтительному варианту осуществления настоящего изобретения в основном идентичен способу движения робота-уборщика согласно третьему предпочтительному варианту осуществления настоящего изобретения за исключением того, что этапы установки выполняют повторно, и за исключением направления спирали на этапах поворота, которые выполняют после повторного выполнения этапов установки.
Когда микрокомпьютер определяет, что этапы установки необходимо повторно выполнить для эффективного движения робота-уборщика или для эффективной очистки очищаемого пространства в соответствии с расположением преграды 138 и размером и формой очищаемого пространства даже после того, как этапы очистки назначили для некоторых из ячеек С1 - С4, микрокомпьютер прерывает основную программу и повторно выполняет этапы установки.
Когда повторно выполняют этапы установки, задают пространство, подлежащее очистке, исключая очищенное пространство 133, т.е. ячейки С1 - С4, уже очищенные на этапах очистки, и затем делят его на множество ячеек С5 - С16.
Вновь разделенные ячейки С5 - С16 устанавливают так, что ячейки С5 - С16 имеют тот же самый размер, форму и направление, как ранее разделенные ячейки С1 - С4. Однако можно по-другому устанавливать размеры, форму и направления ячеек С5 - С16.
Прежде, чем повторно выполнять этапы установки, этапы очистки выполняют так, чтобы ячейки 132 последовательно очищались против часовой стрелки в форме спирали 136. С другой стороны после того как этапы установки повторно выполнены, этапы очистки выполняют так, чтобы ячейки 132 последовательно очищались по часовой стрелке в форме спирали 136.
Согласно способу движения робота-уборщика, как очевидно из приведенного выше описания, очищаемое пространство делят на одну или более ячеек и выполняют операции движения робота-уборщика, подходящие для очистки ячейки. Следовательно, настоящее изобретение имеет эффект улучшения эффективности очистки ячеек и таким образом улучшения эффективности очистки всего очищаемого пространства.
Кроме того, операции по очистке выполняют по направлению спирали по-ячейно. Следовательно, настоящее изобретение имеет эффект предоставления возможности пользователю или микрокомпьютеру, установленному в роботе-уборщике, легко отслеживать ход выполнения операций по очистке и когда операция по очистке закончена и определять ход выполнения способа очистки согласно ходу операций по очистке, что включает в себя и определение уровня заряда батареи.
Так как операции по очистке выполняют по направлению спирали по-ячейно (ячейка за ячейкой), как описано выше, невозможно делить очищаемое пространство на две части. Следовательно, настоящее изобретение имеет эффект сокращения ненужных операций движения робота-уборщика.
Кроме того, операции по счистке выполняют по-ячейно, когда робот-уборщик объезжает преграду. Следовательно, настоящее изобретение имеет эффект улучшения эффективности очистки с помощью робота-уборщика.
Хотя предпочтительные варианты осуществления настоящего изобретения были раскрыты в иллюстративных целях, специалисты должны понимать, что возможны различные модификации, добавления и замены без отхода от объема и формы изобретения, которое раскрыто в прилагаемой формуле изобретения.
Реферат
Способ движения робота-уборщика содержит один или более этапов установки, состоящих из задания пространства, подлежащего очистке, и разделения установленного пространства на одну или более ячеек. Один или более этапов очистки, которые предназначены для соответствующих ячеек, состоят из движения робота-уборщика для очистки соответствующих ячеек так, чтобы направления движения робота-уборщика были перпендикулярны друг другу. В некоторых из предназначенных ячеек выполняют один или более этапов поворота после того, как закончены соответствующие этапы очистки или соответствующие этапы установки. Движения робота-уборщика к следующей ячейке, подлежащей очистке, можно выполнять так, чтобы установленное пространство очищалось по направлению спирали ячейка за ячейкой. Технический результат заключается в сокращении ненужных операций движения робота-уборщика и улучшении эффективности очистки. 2 н. и 23 з.п. ф-лы, 13 ил.

Комментарии