Устройство для спуска и подъема плавающих объектов на волнении - SU361923A1
Код документа: SU361923A1
Чертежи
Описание
1
Изобретение относится к области судостроения и касается устройств для спуска и подъема плавающих объектов на волнении.
Известны устройства для спуска и подъема плавающих объектов на волнении, содержащие тросовую проводку, лебедку следящего действия с храповым механизмом и систему управления приводами лебедки.
Целью данного изобретения является исключение динамических нагрузок и повышение безопасности при проведении спуско- подъемных операций за счет автоматического выбора наиболее рационального момента включения и выключения храпового механизма.
Сущность изобретения поясняется чертежом .
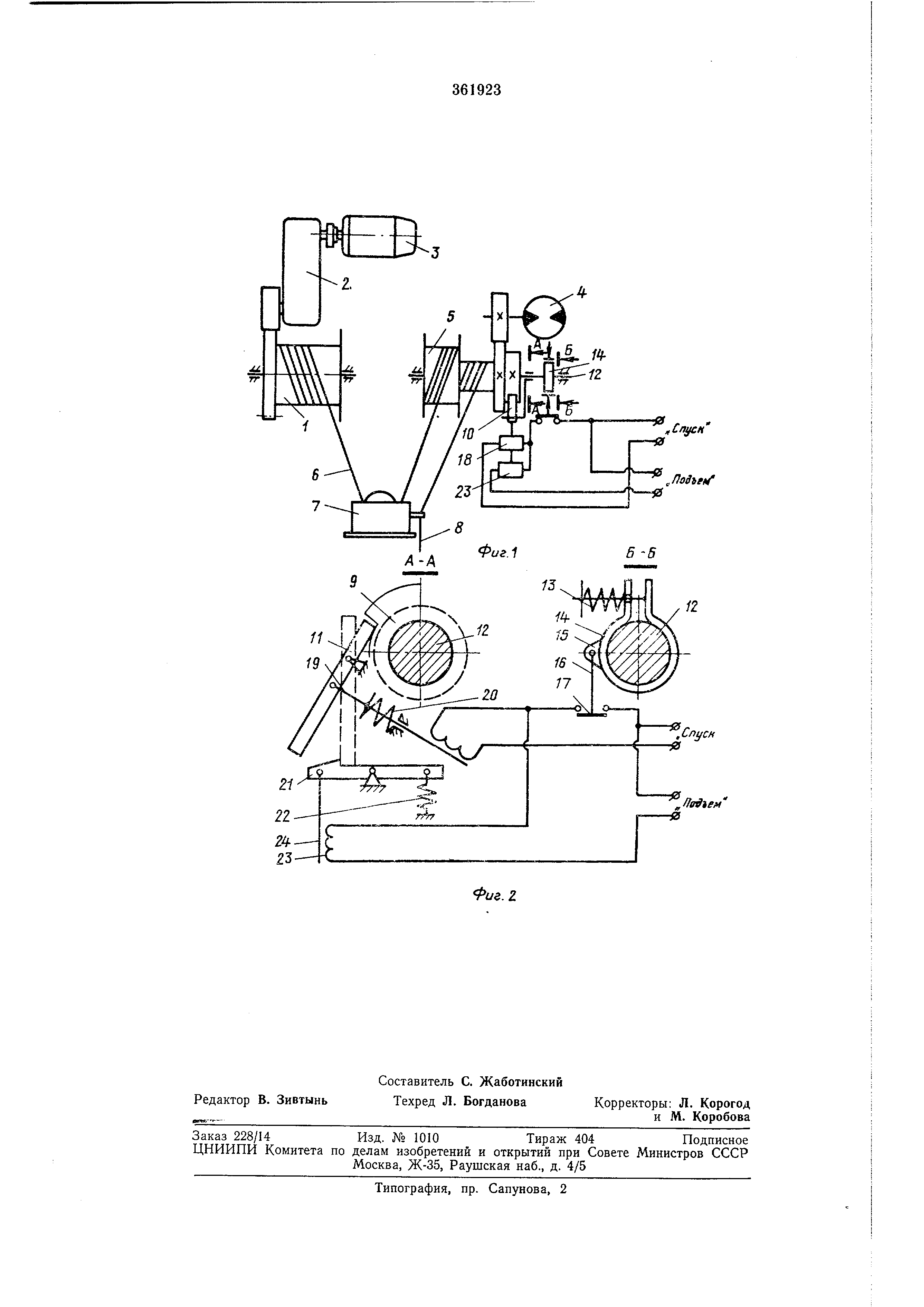
На фиг. 1 изображена -схема устройства (вид в плане); на фиг. 2-разрез устройства по линиям А-А и Б-Б на фиг. 1 и электрическая связь между управляющим органом и исполнительными механизмами.
Устройство состоит из грузовой лебедки, содержащей барабан /, редуктор 2 и электрический двигатель 3, лебедки следящего действия , состоящей из следящего -привода 4 (которым может служить гидромотор с гидропневмоаккумулятором ) и двухсекционного барабана 5.
На грузовом барабане / секции с больщим диаметром двухсекционного барабана 5 крепятся ходовые концы грузового троса 6, охватывающего щкив грузозахватного устройства 7. К секции с меньщим диаметром двухсекционного барабана 5 крепится конец вспомогательного каната 8. Храповое колесо 9 храпового устройства 0 жестко соединено с двухсекционным барабаном 5 и предназначено для исключения его проворачивания под нагрузкой в сторону травления в необходимый
момент при наложении собачки храповика //. На валу 12 следящей лебедки установлено подпружиненное пружиной 13 фрикционное кольцо 14, которое через проушину 15 и тягу 16 шарнирно соединено с выключателем 17
цепей управления «Спуск и «Подъем. Электромагнитный толкатель 18 при помощи щтока 19, подпружиненного пружипой 20, в необходимый момент выводит собачку храповика У/ из зацепления с храповым колесом 9
и стопорит защелкой 21, подпружиненной пружиной 22. Электромагнитный толкатель 25 при помощи щтока 24 шарнирно связан с защелкой 21 и предназначен для ее отдачи, обеспечивая тем самым налол ение собачки
храповика 11 в необходимый момент на храповое колесо 9.
Устройство работает следующим образом: для спуска объекта на воду собачку храповика // накладывают на храповое колесо 9,
грузозахватное устройство 7 соединяют со
спускаемым объектом, свободный конец вспомогательного каната 8 крепят к объекту с запасом , а двигатель 5 включают на выбирание грузового троса 6 для снятия объекта со штатного места хранения. После выноса объекта за борт привод 4 включается в режим слежения за натяжением каната и подается питание на клеммы «Онуск цепи питания электромагнитного толкателя 18. Грузовая лебедка включается на травление, обеспечивая спуск объекта на воду, а двухсекционный барабан 5 удерживается от вращения в сторону травления стопорным устройством 10. В процессе спуска при возникновении первого момента плавучести, характеризующегося появлением слабины в грузовом тросе 6, привод 4, находящийся в режиме слежения за иатяжением , выбирает появившуюся слабину, а фрикционное кольцо 14, проворачиваясь вместе с валом 12, через проущину 15 и тягу 16 замыкает контакт выключателя 17, обеспечивая питание электромагнитного толкателя 18, шток 19 которого выводит собачку храповика 11 из зацепления с храповым колесом 9 и стопорит ее защелкой 21. Таким образом, объект оказывается спущенным на воду, следящий привод 4 обеспечивает слежение за натяжением грузового троса 6, а храповое устройство 10 не препятствует вращению барабана 5 Б сторону травления. При дальнейщем травлении барабаном / образовавшаяся слабина грузового троса 6 остается постоянной, так как вспомогательный канат 8 обеспечивает слежение за качающимся на волне объектом , одновременно наматывая или сматывая грузовой трос 6. После отсоединения грузозахватного устройства 7 и поднятия его грузовой лебедкой на высоту, больщую чем высота волны, отсоединяется вспомогательный канат 8.
Для подъема объекта вспомогательный канат 8, который служит направляющим для спуска грузозахватного устройства, крепят к объекту в момент, когда устройство приспущено на расстояние до объекта большее высоты волны, после чего собачка храповика 11 стапорится защелкой 21, а привод 4 включается в реЖИм слежения за натяжением. После спуска и соединения грузозахватного устройства 7 с плавающим объектом, грузовая лебедка включается на выбирание, и по истечению некоторого промежутка времени, необходимого для разгона грузового привода, подается питание на клеммы «Подъем. В случае, если питание подано в момент, когда объект опускается с вершины волны к ее подошве, лебедка следящего действия работает в режиме травления, а установленное на валу 12 фрикционное кольцо 14 через проущину 15 и тягу 16, проворачиваясь, размыкает цепь питания электромагнита 23. В случае, если объект поднимается от подошвы волны к ее верщине , следящая часть лебедки работает на выбирание слабины в грузовом канате, а, следовательно , фрикционное кольцо 14, проворачиваясь , замыкает контакты выключателя 17 цепи электромагнита 23, шток 24 которого отдает защелку 21, а пружина 20 накладывает собачку храповика // на храповое колесо 5. В этом случае объект после достижения вершины волны зависает, так как барабан лебедки следящего действия удерживается от вращения в сторону травления храповым устройством . Грузовая часть лебедки продолжает подъем объекта, а в случае подхода волны более высокой, чем та, на которой произощло зависание, волна поднимает объект, а храповое устройство 10 позволяет лебедке следящего действия выбрать образовавшуюся слабину и предотвратить травление грузового каната со следящего барабана.
Предмет изобретения
Устройство для спуска и подъема плавающих объектов на волнении, содержащее тросовую проводку, лебедку следящего действия с храповым механизмом и систему управления приводами лебедки, отличающееся тем, что, с целью исключения динамических нагрузок и повышения безопасности яри проведении
спуско-подъемных операций за счет автоматического выбора наиболее рационального момента включения и выключения храпового механизма, на валу лебедки следящего действия установлена подпружиненная фрикционная обойма, кинематически связанная с органом управления цепями питания исполнительных механизмов возвратно-поступательного действия, один из которых в цепи управления спуском шарнирно связан с собачкой храповика , а второй в цепи управления подъемом - с защелкой, имеющей конфигурацию, обеспечивающую фиксацию собачки храповика в нерабочем положении.
0
,Спусн
/V
noibtnf
.
Реферат
Формула
Комментарии