Устройство позиционирования рыбы - RU2104647C1
Код документа: RU2104647C1
Чертежи


Описание
Изобретение касается устройства автоматического позиционирования обезглавленной рыбы относительно положения ее плоскости симметрии и тактовой подачи рыбы в рыбообрабатывающую машину, осуществляющую обработку рыбы при ее подаче в направлении и положении плавания, включающее загрузочный транспортер с приводимым во вращательное движение опорным транспортером с опорными элементами, расположенными друг от друга на удалении, средство прижима захваченной опорным транспортером рыбы и расположенный над загрузочным транспортером загрузочный механизм с подающим транспортером для тактовой транспортировки рыбы на загрузочный транспортер в едином, зависимом от размера положении поверхности среза головы.
Аналогичное устройство известно из патента ФРГ 2939625. Это устройство имеет загрузочный механизм в форме желобчатой ленты с поперечными поворотными лотками, в которых рыба транспортируется в едином боковом положении и по выполненному срезу также в едином положении поверхности среза головы. Рыба сбрасывается на загрузочный транспортер, образованный боковыми лентами и опорным транспортером, так что рыба перемещается вдоль по загрузочному транспортеру в положении и направлении плавания. Опорный транспортер имеет расположенные на одинаковых расстояниях опорные элементы для подпорки рыбы в области брюшной полости, поэтому скорость движения желобчатой ленты и загрузочного транспортера приведены в соответствие друг с другом таким образом, что рыба после сброса занимает соответствующее положение относительно опорных элементов. Позиционирование каждой рыбы относительно положения ее плоскости симметрии осуществляется затем прижимом в виде ролика, который прижимает рыбу, положенную брюшной полостью на опорный элемент для позиционирования так, что оболочка брюшной полости рыбы становится вогнутой при косвенном прилегании боковых отростков позвонков к опорному элементу.
Недостатком этого изобретения состоит в том, что отрезок времени между сбросом рыбы и ее попаданием на опорный транспортер варьируется по причине действующих при этом, не определяемых факторов влияния, так что момент попадания, а следовательно, и положение рыбы относительно опорных элементов загрузочного транспортера определить точно заранее нельзя. Такие факторы влияния являются в основном следствием различий в консистенции, свойствах верхней поверхности рыбы, ее массы и т.д. Кроме того, очевидно, что это решение не позволяет осуществить индивидуальную подгонку в соответствии, например, с различной длиной брюшной полости для рыбы различного размера, так что оптимальное позиционирование достигается только для рыбы средней величины.
Задачей изобретения является предложение решения, которое может в значительной степени устранить названные факторы влияния и с целью точного размещения для последующей обработки также оптимально позиционировать каждую рыбу независимо от ее размера.
Задача согласно изобретению решается тем, что загрузочный механизм снабжен расположенным между подводящим и загрузочным транспортером и непосредственно выше последнего улавливающим элементом для промежуточного приема поступающей с загрузочного механизма рыбы, при этом увеличивающий элемент оснащен исполнительными средствами, которые активируются в момент их включения с учетом соответствующего размера рыбы в смысле ее освобождения.
Достигаемые этим решением преимущества состоят, в частности, в том, что рыба, освобожденная в индивидуально установленный момент, принимается в точно заранее определенное время, чему также способствует чрезвычайно короткий путь падения рыбы между улавливающим элементом и опорным транспортером. Улавливающий элемент для промежуточного приема и тактовой передачи рыбы известен, например, из ДК 2241/72. В этом случае улавливающий элемент представляет собой накопительный элемент, который позволяет оператору подавать с определенной свободой шага обрабатываемую рыбу, которая затем освобождается в четко установленном рабочем такте машины для ее приема машиной. При этом имеется в виду только то, что рыба располагается таким образом, что она может захватываться захватом и транспортироваться через машину.
Наконец, из патента ГДР 91328 известно устройство, в котором рыба, транспортируемая с помощью желобчатого загрузочного транспортера, подается путем открытия желобов на расположенный ниже вертикальный транспортер, по которому рыба транспортируется в поперечном к ее продольной оси направлении. При этом подача осуществляется в том случае, когда рыба касается головного упора, установленного на пути ее транспортировки.
Детали преимущественного выполнения устройства согласно изобретению включены в зависимые пункты формулы изобретения.
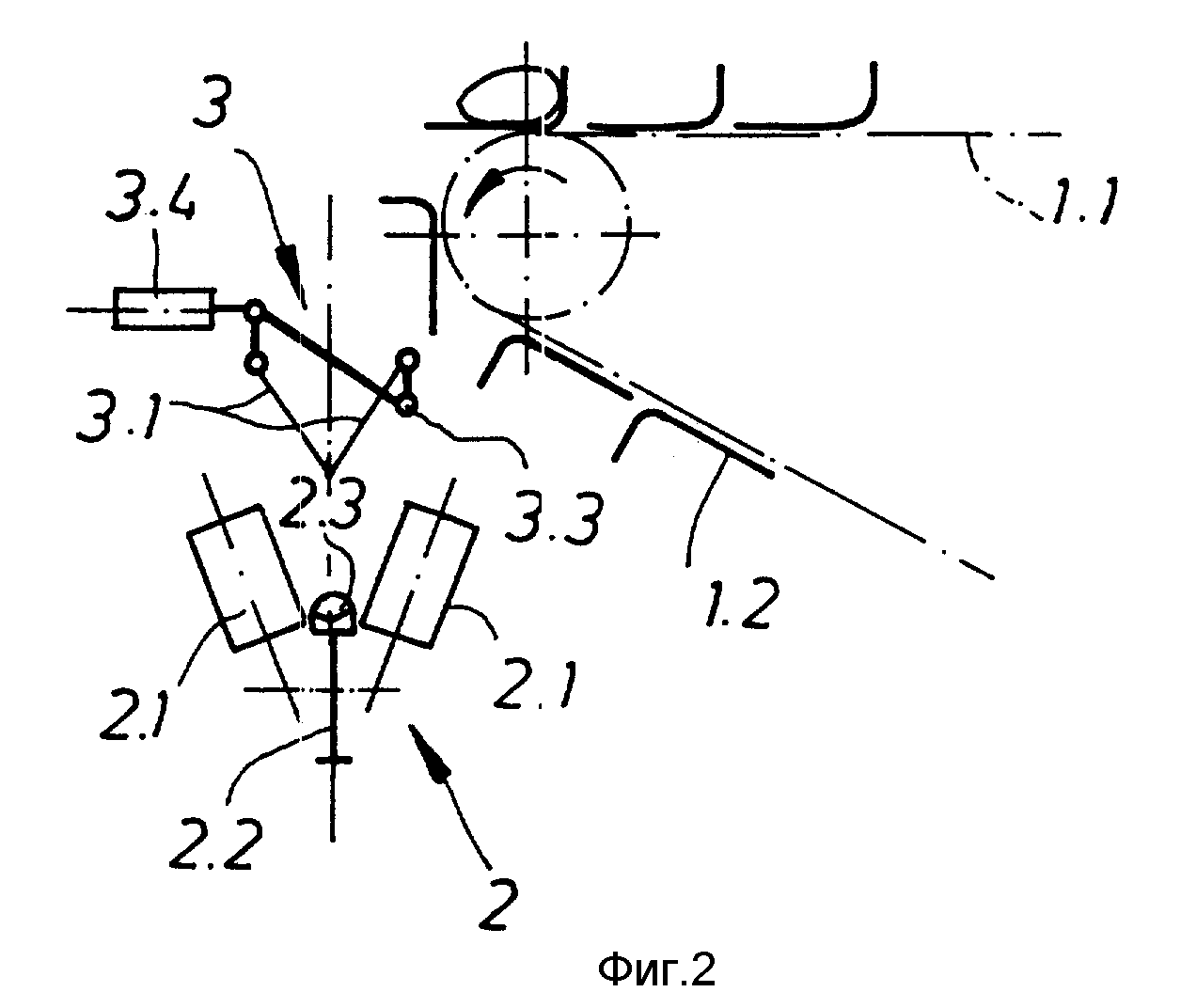
Изобретение поясняется ниже более подробно на примере выполнения, показанном на чертежах: фиг. 1 показывает в перспективе передаточный механизм рыбообрабатывающей машины; фиг. 2 показывает вид сбоку устройства согласно фиг. 1; фиг. 3 показывает часть продольного разреза опорного транспортера; фиг.4 показывает блок-схему управления улавливающим элементом.
Устройство согласно изобретению является составной частью рыбообрабатывающей машины, которая предназначена для автоматического отсекания головы рыбы и удаления костей. Предпочтительная конструкция такой машины включает в себя подводящий транспортер 1, по которому рыба доставляется в поперечном направлении, находящийся под его оконечной областью и включенный перед механизмом машины для удаления костей загрузочный транспортер 2 и расположенный между ним и подводящим транспортером 1 управляемый улавливающий элемент 3 для промежуточного приема рыбы, подаваемой с подводящего транспортера 1.
Подводящий транспортер 1 состоит преимущественно из ведомого бесконечного желобчатого транспортера 1.1 с поперечными желобами 1.2, в области которых измерительным щупом 1.3 измеряется толщина головы рыбы, согласно результату измерения рыба укладывается в положение отсекания головы и обезглавливается.
Загрузочный транспортер 2 состоит из пары расположенных по отношению друг к другу V-образно фланговых транспортеров 2.1, которые приводятся в действие синхронно и движутся бесконечно. Активные поверхности фланговых транспортеров 2.1 выполнены в направлении подачи шероховатыми. Основание загрузочного транспортера 2 образует бесконечный опорный транспортер 2.2, который приводится во вращательное движение синхронно с фланговыми транспортерами 2.2, так что образуется желоб, имеющий с трех сторон транспортирующие плоскости. Опорный транспортер 2.2 на его разгрузочном конце выполнен относительно фланговых транспортеров 2.1 удлиненным и имеет по своему периметру распределенные по отношению друг к другу в продольном направлении на одинаковых расстояниях опорные элементы 2.3, которые имеют на своей выступающей в транспортирующий желоб части опорную поверхность выпуклой формы. Опорный транспортер 2.2 выполнен между опорными элементами 2.3 желобчатым таким образом, что образуется V-образная опора, проходящая вдоль опорного транспортера 2.2. В зоне опорного транспортера 2.2 под ним находится прижим 2.4 в форме вытесняемого пружиной направляющего ролика, на периметре которого предусмотрена призматическая канавка в форме колеи.
Улавливающий элемент 3 расположен непосредственно над загрузочным транспортером 2 и состоит из пары барьерных элементов 3.1, установленных по отношению друг к другу V-образно и направленных вдоль загрузочного транспортера 2 и симметрично к его плоскости симметрии. Барьерные элементы 3.1 расположены с возможностью поворота вокруг осей 3.2, которые проходят в зоне кромок барьерных элементов 3.1. Барьерные элементы 3.1 соединены друг с другом синхронизирующим механизмом 3.3 и поворачиваются исполнительным звеном 3.4 в противоположном направлении.
Принцип действия устройства согласно изобретению описан ниже на примере транспортировки рыбы.
Обрабатываемая рыба вручную либо после автоматического позиционирования с помощью выпрямителя кладется в желоб 1.2 подводящего транспортера 1 "голова к хвосту" и "брюшная полость к спинке", измеряется, устанавливается в положение отсекания головы и обезглавливается. В конечную зону подводящего транспортера 1 попадает таким образом тушка рыбы, которая там сбрасывается на замкнутый улавливающий элемент 3, при этом обезглавленная тушка улавливается в позиции, которая определена срезом головы.
К опорному транспортеру 2.2 подключен тактовый датчик 2.2, преобразующий движение опорного транспортера в последовательность импульсов, которая как и соответствующее значение измерительного щупа 1.3 вводится в вычислитель 4.1. Вычислитель 4.1 рассчитывает с учетом измеренного значения коррекции для импульса срабатывания улавливающего элемента 3 и соответственно через блок 4.2 усиления мощности приводит в действие исполнительное звено 3.4. Это значение коррекции представляет собой разницу между длиной брюшной полости измеренной рыбы и длиной самой маленькой рыбы, подлежащей обработке. При этом управление запрограммировано таким образом, что значение коррекции в случае самой маленькой обрабатываемой рыбы равно нулю, т.е. подбор такта срабатывания улавливающего элемента 3 с опорным транспортером 2.2 или его опорными элементами 2.3 таков, что самая маленькая рыба укладывается на опорные элементы 2.3 точно позиционированно без корректировки положения элемента ее брюшной полости. Соответственно значение коррекции, полученное для более крупной рыбы, напротив, вызывает более раннее размыкание улавливающего элемента 3, т.е. сокращение такта срабатывания, так что учитывается автоматически зависимое от размера различное положение оконечной части брюшной полости относительно положения опорных элементов 2.3. При этом переключателем 4.3 может осуществляться смещение последовательности тактов срабатывания улавливающего элемента 3 относительно положения опорных элементов 2.3, так что могут быть исправлены единые погрешности положения.
Реферат
Использование: изобретение относится к устройству автоматического позиционирования рыбы относительно положения ее плоскости симметрии и тактовой подачи рыбы в рыбообрабатывающую машину. Сущность изобретения: устройство включает в себя подводящий транспортер в виде желобчатого транспортера и расположенный ниже и поперек направления его движения загрузочный транспортер для подачи рыбы в обрабатывающую машину. Загрузочный транспортер снабжен опорным транспортером, имеющим опорные элементы, на которые укладывается обезглавленная рыба брюшной полостью для позиционирования. С этой целью между подводящим и загрузочным транспортерами установлен улавливающий элемент, который управляется циклически в смысле размыкания для освобождения рыбы, временно находящейся в улавливающем элементе. Рабочий цикл соответственно варьируется с учетом результата измерения, представляющего собой размер рыбы, так что каждая рыба независимо от ее размера подается позиционно точно, т.е. с учетом относительного положения ее брюшной полости к опорным элементам, на опорный транспортер. 4 з.п. ф-лы, 4 ил.

Комментарии