Устройство и способ автоматического ощипывания забитой птицы - RU2669011C1
Код документа: RU2669011C1
Чертежи



Описание
Настоящее изобретение относится к устройству, предназначенному и выполненному с возможностью автоматического ощипывания забитой птицы, содержащему средство перемещения, которое предназначено и выполнено с возможностью обеспечения перемещения птицы, свободно подвешенной за лапки, в направлении Т перемещения вдоль траектории перемещения, и две боковые колодки, которые отстоят друг от друга, расположены на противоположных сторонах траектории перемещения и образуют канал, при этом на внутренних поверхностях каждой из колодок, обращенных друг к другу и повернутых в направлении траектории перемещения, имеются средства ощипывания птицы, перемещаемой по указанному каналу, которые выполнены с возможностью приведения в контакт с ощипываемой птицей.
Настоящее изобретение также относится к способу автоматического ощипывания забитой птицы, включающему следующие этапы: перемещение птицы, свободно подвешенной за лапки, в направлении Т перемещения вдоль траектории перемещения, выполняемое при помощи средства перемещения; ощипывание птицы в процессе ее перемещения по каналу, образованному двумя боковыми колодками, отстоящими друг от друга и расположенными на противоположных сторонах траектории перемещения, выполняемое при помощи средств ощипывания, расположенных на внутренних поверхностях боковых колодок, причем средства ощипывания выполнены с возможностью контакта с птицей при ее перемещении по каналу.
Указанные устройства и способы применяют при промышленной обработке забитой птицы для ее ощипывания. Для этого забитую птицу подвешивают за лапки или ножки и перемещают по каналу, направленному вертикально вниз. При поступлении птицы в канал ощипывающие средства, расположенные по обеим сторонам канала, взаимодействуют с оперением птицы. Как правило, обеспечивают непрерывное перемещение птицы по каналу вдоль траектории перемещения. Птицу пропускают через ощипывающие средства, расположенные вдоль указанного канала. Для того, чтобы обеспечить контакт ощипывающих средств с обрабатываемой птицей, канал выполнен узким в соответствии с размером птицы. Поскольку птицу подвешивают за лапки и перемещают свободно подвешенной, ее обработка в узком канале становится затруднительной, поскольку свободные концы тушек, на которых находятся их головы, отклоняются от направления перемещения при контакте с ощипывающими средствами, расположенными в указанном канале. При осуществлении процесса ощипывания перемещение птиц в соответствующем направлении затруднено, или происходит принудительное проталкивание птиц в обратном направлении, при этом тушки могут выскакивать из средства перемещения. Кроме того, возникает проблема, заключающаяся в том, что возможность перемещения птиц обеспечивается при их частичном или полном выведении из взаимодействия с ощипывающими средствами, при этом эффективность процесса ощипывания существенно снижена.
Для обеспечения возможности обработки птиц в указанном устройстве и возможности их перемещения внутри него согласно известному уровню техники были предприняты попытки установки направляющих рельс перед зоной поступления в канал, которые сходятся в направлении перемещения до ширины, приблизительно соответствующей расстоянию между боковыми колодками. Однако при этом невозможно устранить указанные проблемы. Более того, были предприняты попытки установки в устройстве двух боковых колодок, которые в незначительной степени сходятся друг с другом. Другими словами, для упрощения впуска или поступления птицы в канал в известных технических решениях расстояние между двумя боковыми колодками в зоне поступления птицы в канал превышает расстояние между ними в зоне выпуска. Однако использование указанного известного устройства приводит к снижению производительности, поскольку из-за увеличенного расстояния между боковыми колодками не обеспечивается возможность контакта всех средств ощипывания с птицей вдоль всего канала.
Таким образом, целью данного изобретения является создание простого и эффективного устройства для автоматического ощипывания забитой птицы, которое более эффективно обеспечивает поступление птицы между боковыми колодками и ощипывающими средствами. Кроме того, цель также заключается в создании соответствующего способа.
Указанная цель достигается благодаря устройству, обладающему вышеописанными признаками, при этом указанное устройство содержит стационарное средство принудительного поддерживания птицы при ее прохождении между двумя боковыми колодками и расположенными на них ощипывающими средствами, которые расположены в зоне поступления птицы в канал. Благодаря наличию стационарного средства во зоне поступления птицы в указанный канал, а именно, непосредственно перед каналом в направлении Т перемещения, выполнено простое и надежное средство для поддерживания птицы при ее поступлении или для проталкивания птицы между боковыми колодками. Конфигурация настоящего изобретения обеспечивает возможность автоматического поступления птицы в канал с обеспечением безопасности для продукции.
Предпочтительно средство принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками предназначено и выполнено с возможностью приложения составляющей механического усилия в направлении Т перемещения птицы. Это означает, что при поступлении в зону между боковыми колодками птицу захватывают с помощью указанного средства и, таким образом, обеспечивают возникновение импульса в направлении Т перемещения при поступлении птицы. Термин «захватывают» в данном контексте означает, что средство принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками входит в активное соединение с птицей, таким образом, обуславливая возникновение действующей на нее составляющей силы.
Предпочтительный усовершенствованный вариант изобретения отличается тем, что средство принудительного поддерживания птицы при ее поступлении в зону между двумя боковыми колодками предназначено и выполнено с возможностью приложения составляющей силы, которая направлена вертикально вниз. Таким образом, обеспечивается поддерживание висящих частей тушек птицы, при этом при поступлении между боковыми колодками и ощипывающими средствами обеспечивается контакт птицы с указанными средствами по всей длине. Более того, благодаря направленной вертикально вниз составляющей силы обеспечивается прочное удерживание птицы в подвесках и предотвращается ее выскакивание из них, в частности под действием импульса в направлении Т перемещения. Кроме того, благодаря конфигурации настоящего изобретения обеспечивается постоянный контакт птицы со всеми ощипывающими средствами, при этом повышается эффективность ощипывания.
Целесообразно, чтобы боковые колодки были расположены и ориентированы параллельно на всей протяженности канала, а также чтобы на внутренних сторонах указанных колодок было расположено несколько стационарных ощипывающих головок, которые выполнены с возможностью приведения во вращение для функционирования в качестве ощипывающих средств. Благодаря тому, что указанные головки не перемещаются вместе с птицей в направлении Т перемещения, обеспечивается возможность выполнения эффективного ощипывания по всей длине канала. Поскольку канал по всей длине имеет равномерную ширину и боковые колодки по всей длине проходят параллельно, все ощипывающие головки, расположенные по всей длине канала, в равной степени входят во взаимодействие с птицей, в результате чего обеспечивается повышенная производительность и улучшенная подача птицы.
Преимущественно средство принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками содержит по меньшей мере два вращательных тела, которые выполнены с возможностью приведения во вращение и расположены на противоположных сторонах относительно траектории перемещения. Два расположенных напротив друг друга вращательных тела могут быть одинаковыми или разными. Два вращательных тела, образующие указанное средство, предназначены и выполнены с возможностью одновременно входить в контакт с ощипываемой птицей. При повороте вращательного тела возникает составляющая силы, действующая на птицу в направлении Т перемещения и/или в направлении, проходящем вертикально вниз.
Предпочтительный усовершенствованный вариант предложенного устройства отличается тем, что вращательные тела выполнены с возможностью приведения во вращение вокруг осей вращения, проходящих вертикально и/или горизонтально. Одно вращательное тело, два или более могут быть расположены с любой стороны относительно траектории перемещения. Направление осей вращения может быть одинаковым или разным. При вращении вращательных тел вокруг вертикальной оси вращения составляющая силы, имеющая максимальное значение, может быть обеспечена в направлении Т перемещения. При вращении вращательных тел вокруг горизонтальной оси вращения максимальная составляющая силы может быть получена в вертикальном направлении. Кроме того, очевидно, что оси вращения могут проходить под углом относительно вертикального или горизонтального направления, соответственно, обуславливая образование составляющих силы в разных направлениях.
Преимущественно вращательные тела имеют либо цилиндрическую, либо коническую форму. Таким образом, обеспечивается возможность простого и эффективного получения импульса силы, действующего на птицу в направлении Т перемещения и/или в направлении, проходящем вертикально вниз. Кроме того, изготовление указанных вращательных тел является простым и дешевым.
В особенно предпочтительном варианте выполнения предложенного устройства все вращательные тела содержат упругие толкающие элементы, выполненные на наружной поверхности указанных тел для обеспечения возможности последовательного захвата тушек птицы по отдельности, сначала путем вращения вращательного тела, а затем посредством толкающих элементов, и возможности проталкивания птицы в канал между ощипывающими головками. При использовании упругих толкающих элементов, например, пальцеобразных выступов или шипов, выполненных из резины или подобного материала, обеспечена возможность безопасной передачи составляющей силы, полученной в результате вращения, непосредственно птице.
Приводная скорость средства принудительного поддерживания птицы при ее поступлении в зону между двумя боковыми колодками в направлении Т перемещения предпочтительно равна или превышает приводную скорость средства перемещения. Другими словами, импульс, действующий на птицу непосредственно в зоне поступления в канал, возникает при такой же или немного большей скорости, чем скорость, с которой висящая в подвесках птица перемещается по каналу.
Предпочтительный усовершенствованный вариант выполнения отличается тем, что средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками выполнены с возможностью управления независимо от средства перемещения. Другими словами, во-первых, благодаря стационарной конструкции средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками, а во-вторых, благодаря возможности его независимого управления отсутствует необходимость согласования времени и/или параметров расположения при активации указанного средства принудительного поддерживания и приводной скорости средства перемещения. Например, средство принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания выполнено с возможностью приведения в постоянное вращение независимо от приводной скорости средства перемещения. В результате изготовление устройства и его работа становятся более простыми и удобными.
Достижение поставленной цели также обеспечивается благодаря способу, этапы которого перечислены выше, причем при поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания каждую тушку птицы принудительно поддерживают с помощью средства, стационарно установленного в зоне Е поступления птицы в канал.
Предпочтительно, при поступлении в зону между двумя боковыми колодками на птицу, принудительно поддерживаемую с помощью указанного средства, действует составляющая механического усилия, направленная в направлении Т перемещения птицы и/или вертикально вниз. Таким образом, непосредственно перед поступлением в канал каждую тушку птицы вытягивают вниз и/или проталкивают в канал в растянутом положении.
Преимущественно средство принудительного поддерживания птицы при ее поступлении в зону между двумя боковыми колодками выполнено с возможностью управления независимо от средства перемещения. Это означает, что в процессе осуществления управления нет необходимости согласовывать или синхронизировать средство вытягивания и/или проталкивания птицы и средство перемещения, при этом обеспечивается возможность гибкого и надежного управления.
Дополнительные преимущества, обеспечиваемые благодаря способу согласно данному изобретению, описаны выше в отношении предложенного устройства, которое в частности предназначено для осуществления заявленного способа, поэтому для исключения повторения сделана ссылка на соответствующие цитаты из текста.
Другие соответствующие и/или преимущественные признаки и модификации данного изобретения указаны в зависимых пунктах формулы изобретения и в описании. Особенно предпочтительные варианты выполнения предложенного устройства описаны более подробно со ссылкой на прилагаемые чертежи.
На чертежах:
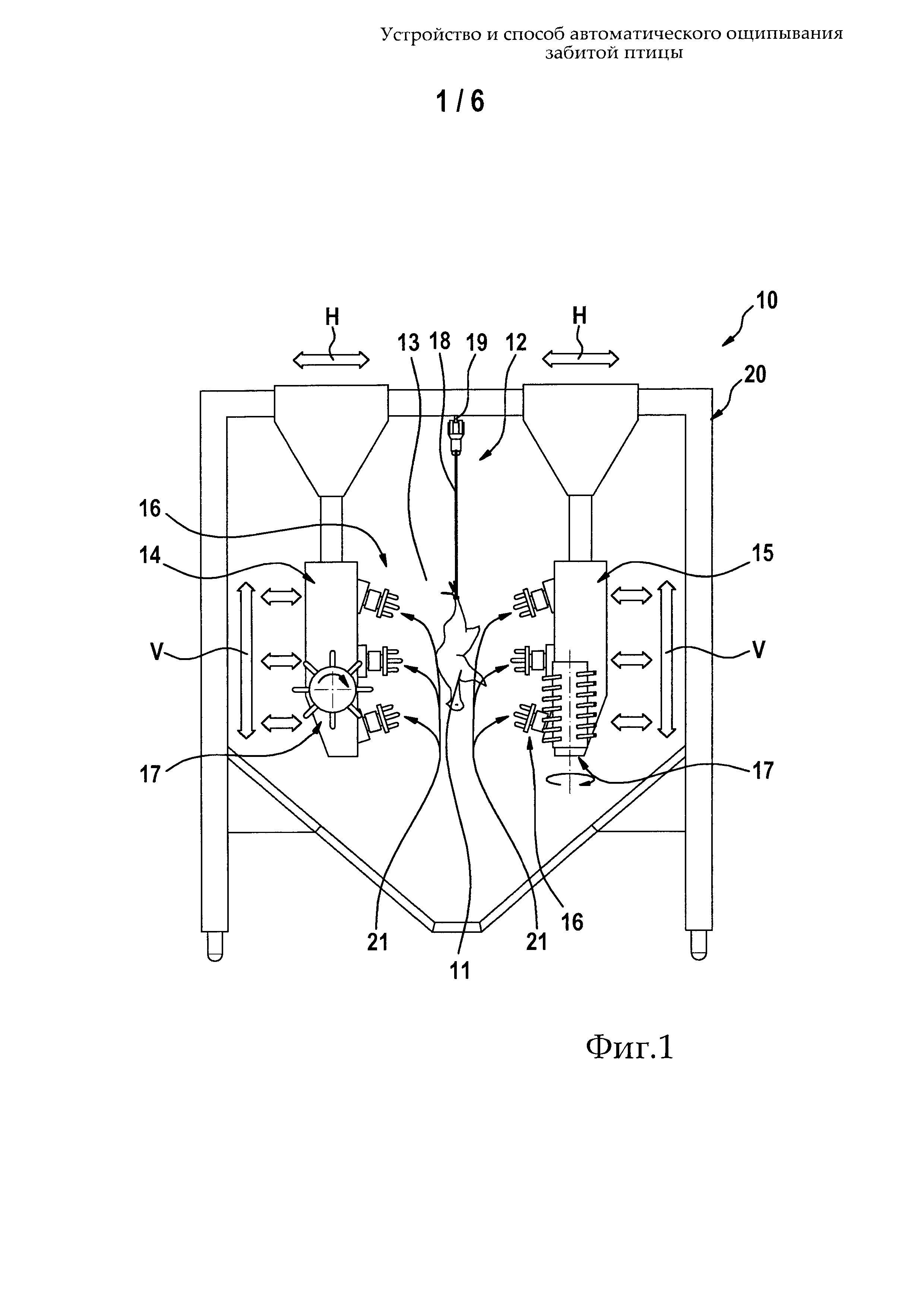
Фиг. 1 схематично изображает вид спереди устройства согласно данному изобретению, при этом боковые колодки находятся в разведенном положении в режиме ожидания.
Фиг. 2 схематично изображает вид спереди боковых колодок, на которых установлены средства ощипывания, в рабочем положении.
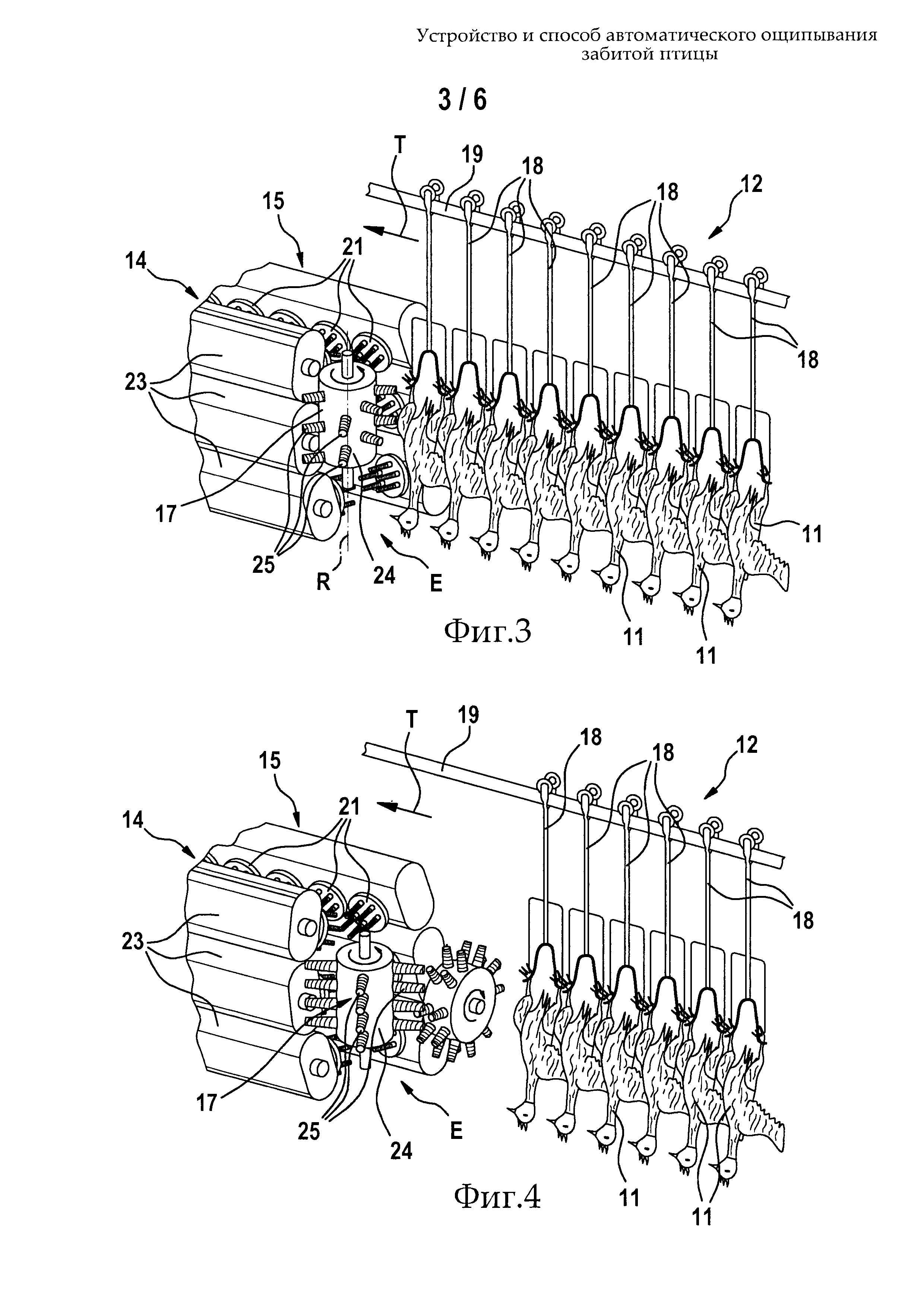
Фиг. 3 изображает первый вариант выполнения стационарного средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания.
Фиг. 4 изображает следующий вариант выполнения стационарного средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания.
Фиг. 5 изображает следующий вариант выполнения стационарного средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания.
Фиг. 6 изображает следующий вариант выполнения стационарного средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания.
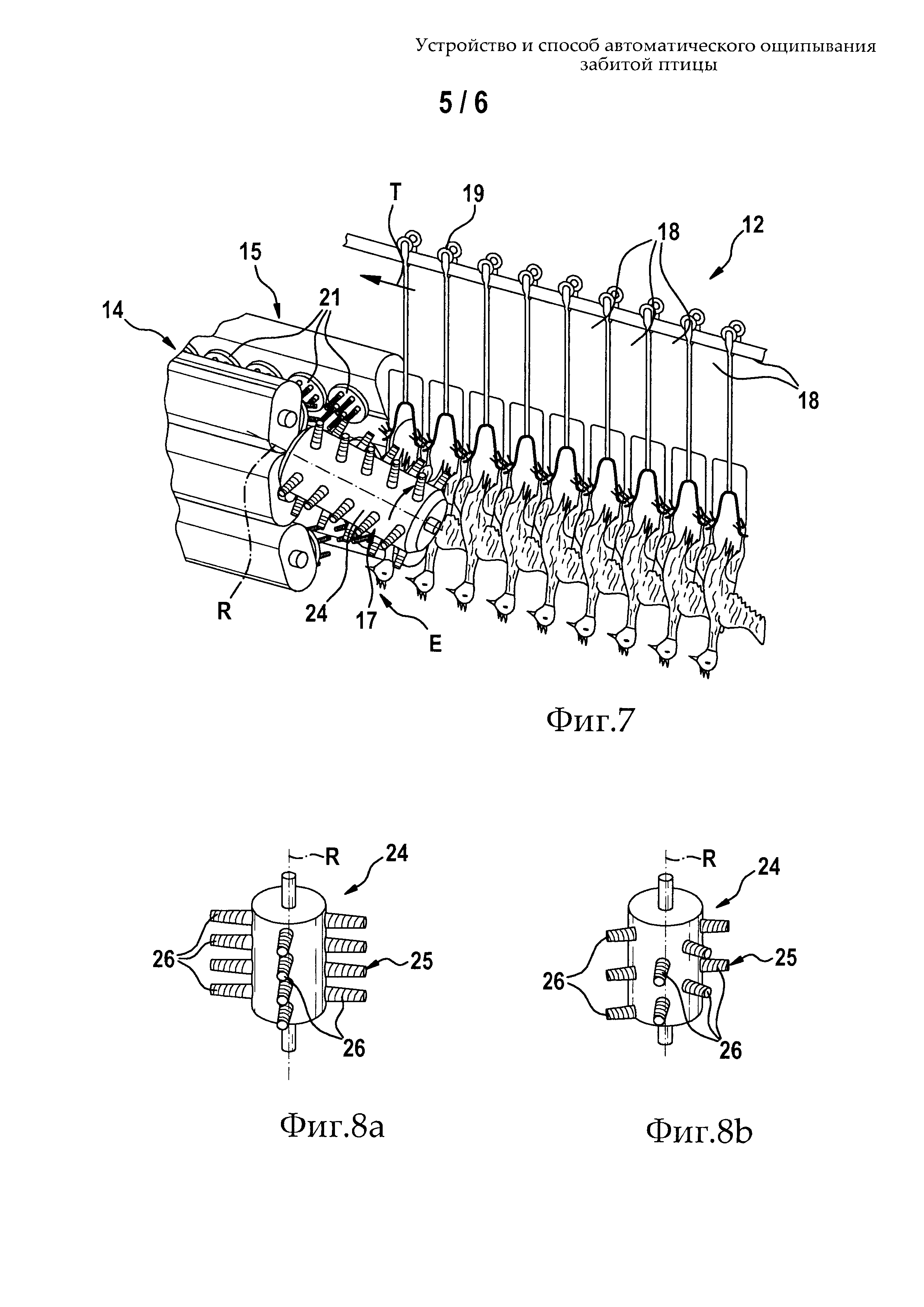
Фиг. 7 изображает еще один вариант выполнения стационарного средства принудительного поддерживания птицы при ее поступлении между двумя боковыми колодками и расположенными на них средствами ощипывания, и
Фиг. 8а - Фиг. 8f изображают разные варианты выполнения вращательных тел.
Устройство, изображенное на чертежах, предназначено для снятия оперения или ощипывания забитой птицы, а именно кур. Однако настоящее изобретение также предназначено для снятия оперения или ощипывания домашней птицы других видов, например, уток, гусей.
Фиг. 1 изображает устройство 10, которое предназначено и выполнено с возможностью автоматического ощипывания забитой птицы 11. Устройство 10 содержит средство 12 перемещения, которое предназначено и выполнено с возможностью перемещения птицы 11, свободно подвешенной за лапки, в направлении Т перемещения вдоль соответствующей траектории. Устройство 10 также содержит две боковые колодки 14, 15, отстоящие друг от друга, расположенные на противоположных сторонах относительно траектории перемещения и образующие канал 13, при этом на боковых поверхностях каждой из колодок, обращенных друг к другу и повернутых вовнутрь относительно траектории перемещения, выполнены средства 16 ощипывания птицы 11, перемещаемой по каналу 13, причем указанные средства выполнены с возможностью контакта с ощипываемой птицей 11.
Устройство 10 согласно настоящему изобретению отличается тем, что содержит стационарное средство 17 принудительного поддерживания птицы 11 при ее поступлении в зону между двумя боковыми колодками 14, 15 и расположенными на них средствами 16 ощипывания, причем средство 17 расположено в зоне Е поступления птицы 11 в канал 13. Средство 17 принудительного поддерживания птицы 11 при ее поступлении в зону между двумя боковыми колодками 14, 15 может содержать один, два или более элементов и расположено непосредственно перед каналом 13 в направлении Т перемещения так, что при перемещении в указанном направлении до поступления в канал 13 сначала обеспечивается контакт птицы 11 со средством 17 для ее принудительного поддерживания при ее прохождении между двумя боковыми колодками 14, 15 и при помощи указанного средства 17 обеспечивается проталкивание птицы 11 в направлении Т перемещения.
Признаки и усовершенствованные варианты, описанные далее по отдельности или в сочетании друг с другом, являются предпочтительными вариантами выполнения. Следует отметить, что признаки, указанные в формуле изобретения и/или описании или указанные в типовом варианте выполнения, также обеспечивают, независимо друг от друга, усовершенствование описанного выше устройства 10.
Изображенное на Фиг. 1 устройство 10 содержит так называемый подвесной конвейер, используемый в качестве средства 12 перемещения. Подвесной или потолочный конвейер обеспечивает возможность перемещения птицы 11, вертикально ориентированной головами вниз. Таким образом, обеспечивается перемещение птицы 11, подвешенной за ножки или лапки в подвесках 18. Подвески 18 расположены на элементе 19 предпочтительно бесконечного конвейера, например, конвейерной цепи. Конвейерный элемент 19 выполнен с возможностью приведения в движение посредством приводного средства (не показано на чертежах) и с возможностью управления его приводной скоростью посредством блока управления (также не показан на чертежах).
Устройство 10 согласно изображенному варианту выполнения содержит раму 20, на которой расположено средство 12 перемещения. Боковые колодки 14, 15 также расположены на раме 20, в частности, с возможностью их вертикального (см. стрелку V) и горизонтального (см. стрелку Н) регулирования для перемещения из режима ожидания и выполнения технического обслуживания (см. Фиг. 1) в рабочее положение (см. Фиг. 2) и обратно, а также для настройки устройства 10 под разные размеры птицы. На внутренних поверхностях боковых колодок 14, 15 предпочтительно выполнено несколько рядов, а в представленном варианте выполнения три ряда средств 16 ощипывания тушек 11 птицы, проходящих почти по всей длине канала 13.
Средство 17 принудительного поддерживания птицы 11 при ее поступлении между двумя боковыми колодками 14, 15 предназначено и выполнено с возможностью приложения составляющей механического усилия в направлении Т перемещения птицы 11. В качестве альтернативы указанному воздействию или в сочетании с ним средство 17 может быть предназначено и выполнено с возможностью приложения составляющей силы, направленной вертикально вниз. Каждая из указанных составляющих силы сама по себе способствует введению или поступлению птицы 11 в канал 13. Сочетание указанных составляющих является особенно предпочтительным. Составляющие силы описывают механический импульс, действующий на каждую отдельную птицу 11, поступающую в зону Е, и способствуют проталкиванию указанной птицы по существу в растянутом состоянии в канал 13.
Боковые колодки 14, 15 могут сходиться в направлении Т перемещения, в частности, в зоне Е поступления или по всей длине канала 13. Кроме того, боковые колодки 14, 15 могут проходить исключительно по существу параллельно друг другу. Боковые колодки 14, 15 предпочтительно расположены и проходят параллельно друг другу. На каждой внутренней поверхности колодок стационарно ощипывающие головки 21, которые выполнены с возможностью приведения во вращательное движение в качестве средств 16 ощипывания. Это означает, что в рабочем положении, то есть, во время обработки ощипывающие головки 21 закреплены на месте и не перемещаются вместе с птицей 11. Ощипывающие головки 21 выполнены в виде вращающихся дисков с выступающими в осевом направлении пальцеобразными выступами 22 или подобными элементами, выполненными из резины или подобного упругого материала. Ощипывающие головки 21 расположены последовательно в ряд. Предпочтительно имеются три ряда указанных головок 21, расположенных друг под другом для обеспечения возможности выдергивания перьев птицы 11 на всем ее теле. Ощипывающие головки 21 предпочтительно выполнены с возможностью приведения во вращение, которое может быть обеспечено посредством отдельных приводов. Предпочтительно для каждого ряда предусмотрен общий привод. Положение, в частности наклон ощипывающих головок 21 может быть обеспечен с возможностью индивидуальной регулировки. Боковые колодки 14, 15 могут представлять собой сплошные боковые стенки. Однако, в зависимости от количества рядов ощипывающих головок 21, предпочтительно, чтобы одна боковая колодка 14, 15 была образована отдельными блоками 23 - в данном примере - тремя блоками 23. Блоки 23 боковых колодок 14, 15 предпочтительно выполнены с возможностью регулирования их положения и взаиморасположения.
Средство 17 принудительного поддерживания птицы 11 при ее поступлении между двумя боковыми колодками 14, 15 содержит по меньшей мере одно вращательное тело 24, однако предпочтительно по меньшей мере два указанных тела, которые выполнены с возможностью приведения во вращение и расположены с противоположных сторон от траектории перемещения. На каждой стороне канала 13 предпочтительно расположено одно вращательное тело 24, при этом вместе они образуют средство 17. Два вращательных тела 24 могут иметь одинаковую или разную конфигурацию. В любом случае вращательные тела 24 расположены перед каналом 13 в направлении Т перемещения, предназначены и выполнены с возможностью контакта с птицей 11 до ее поступления в канал 13. Для этого обеспечена возможность регулирования вращательного тела 24 вместе с боковыми колодками 14, 15, например, в направлении Н (см. Фиг. 1). Кроме того, в других вариантах выполнения обеспечена возможность регулирования положения вращательных тел 24 относительно боковых колодок 14, 15. Если средство 17 принудительного поддерживания образовано только одним вращательным телом 24, которое в этом случае расположено только с одной стороны от траектории перемещения, с противоположной стороны указанной траектории может быть предусмотрено удерживающее средство и, например, захватное средство для самой птицы 11 или, к примеру, для подвески 18. Количество и варианты расположения вращательных тел 24, образующих средство 17 принудительного поддерживания, определяются в зависимости от величины прикладываемой силы.
При помощи приводных средств (не показаны на чертежах) обеспечивается возможность приведения тел 24 во вращение вокруг осей R вращения, проходящих вертикально и/или горизонтально. На Фиг. 1 представлены оба варианта. На Фиг. 3 и Фиг. 4 проиллюстрированы другие варианты выполнения, в которых ось R вращения проходит в вертикальном направлении. Для наглядности вращательные тела 24 на указанных чертежах изображены только на одной стороне канала 13. Вращательные тела 24 расположены с двух сторон, предпочтительно симметрично по обеим сторонам от траектории перемещения. К примеру, на Фиг. 4 изображены два вращательных тела 24, расположенные на каждой стороне канала 13, а именно, в представленном варианте выполнения одно вращательное тело 24 имеет проходящую вертикально ось R вращения, а другое вращательное тело 24 имеет проходящую горизонтально ось R вращения. Как видно на Фиг. 5-7, оси R вращения также могут проходить под углом в вертикальном или горизонтальном направлении. Оси R вращения могут быть наклонены в разных направлениях, например, в зависимости от вида обрабатываемой продукции или размера птицы 11. Например, ось R вращения может проходить параллельно направлению перемещения с наклоном вниз. Кроме того, ось R вращения может быть наклонена вниз и проходит в направлении траектории перемещения или в сторону от нее. Также возможен выбор других наклонов и направлений.
В представленном варианте выполнения вращательное тело 24 может иметь цилиндрическую или коническую форму. Однако возможны и другие варианты выполнения вращательного тела 24, например, треугольной или прямоугольной, выпуклой или вогнутой формы. В частности, также могут быть использованы асимметричные вращательные тела 24. Вместо вращательных тел 24 могут использоваться другие приводные вспомогательные средства, например, поворотные створки, лопасти или подобные элементы. Все вращательные тела 24, независимо от формы и ориентации, содержат упругие толкающие элементы 25, расположенные предпочтительно на наружной поверхности указанных тел, обеспечивая возможность последовательного захвата птиц 11 по отдельности, вначале путем вращения вращательных тел 24, и затем посредством толкающих элементов 25, и возможность проталкивания птиц 11 в канал 13 между ощипывающими головками 21. В изображенном варианте выполнения толкающие элементы 25 представляют собой пальцеобразные выступы 26, подобные пальцеобразным выступам 22 ощипывающих головок 21. Количество, расположение и ориентация пальцеобразных выступов 26 могут быть изменены. Особенно предпочтительно спиральное и/или наклонное и/или червячное устройство и ориентация. Однако пальцеобразные выступы 26 также могут быть равномерно распределены по наружной поверхности. На Фиг. 8а - Фиг. 8f изображены разные варианты выполнения вращательного тела 24, а именно, к примеру, ролики, барабаны и т.д., на наружной поверхности которых выполнены пальцеобразные выступы 26. Вместо пальцеобразных выступов 26 могут быть выполнены шипы или зубцы, либо другие элементы на поверхности, выполненные с возможностью взаимодействия с перьями птицы 11. Конфигурация толкающих элементов 25, например, мягких или жестких пальцеобразных выступов 26, может влиять на величину оказываемого усилия.
Расположение и ориентация пальцеобразных выступов 26, а также расстояние между ними могут быть выбраны в соответствии со скоростью перемещения подвесок 18 или висящей на них птицы 11. Приводная скорость средства 17 принудительного поддерживания птицы 11 в направлении Т перемещения при ее поступлении между двумя боковыми колодками 14, 15 предпочтительно такая же или превышает приводную скорость средства 12 перемещения. Приводные скорости двух вращательных тел 24 одного средства 17 могут быть одинаковыми или разными на противоположных сторонах. Обеспечена возможность управления приводной скоростью каждого вращательного тела 24 в зависимости от приводной скорости средства 12 перемещения. В типовом варианте выполнения с помощью приводных средств средства 12 перемещения обеспечивается возможность приведения в движение одного или каждого из вращательных тел 24 согласованно или синхронно, например, посредством червячной передачи. В предпочтительных вариантах выполнения средство 17 принудительного поддерживания птицы 11 при ее поступлении между двумя боковыми колодками 14, 15 и расположенными на них ощипывающими средствами 16 выполнено с возможностью управления независимо от средства 12 перемещения. Это не исключает, а однозначно предполагает гарантированную возможность обеспечения синхронной работы вращательных тел 24 и средства 12 перемещения. Другими словами, скорость вращения тел 24 и приводная скорость средства 12 перемещения могут соответствовать друг другу, а именно, могут быть синхронизированы. При этом также обеспечена полностью независимая работа, во-первых, вращательных тел 24, а во-вторых, средства 12 перемещения.
Далее со ссылкой на чертежи раскрыта сущность заявленного способа согласно настоящему изобретению.
Птица 11 может быть вручную или механически подвешена за лапки или ножки, например, на подвесках 18 средства 12 перемещения. Затем с помощью конвейера 19 обеспечивают предпочтительно непрерывное перемещение птицы 11 в направлении Т перемещения. Обеспечивается перемещение птицы 11, свободно свисающей вниз, в направлении Т перемещения вдоль соответствующей траектории. В процессе перемещения птицы 11 по каналу 13 выполняют ее ощипывание посредством ощипывающих средств 16, расположенных на внутренних сторонах боковых колодок 14, 15, при этом средства 16 выполнены с возможностью контакта с птицей 11 при ее перемещении по каналу 13.
Согласно изобретению при поступлении в пространство между двумя боковыми колодками 14, 15 и расположенными на них ощипывающими средствами 16 обеспечивается принудительное поддерживание каждой птицы 11 с помощью средства 17, стационарно установленного в зоне Е поступления птицы 11 в канал 13. Поддерживание может быть обеспечено путем воздействия на птицу 11 составляющей силы, действующей в направлении Т перемещения и/или направленной вертикально вниз. Составляющая силы может быть приложена к птице 11 с одной стороны или с обеих сторон.
В варианте выполнения, представленном на Фиг. 5, вращательные тела 24 выполнены коническими и имеют резиновые пальцеобразные выступы, служащие в качестве толкающих элементов 25. Расстояние между резиновыми пальцеобразными выступами соответствует расстоянию между подвесками 18, при этом указанные выступы выполнены в виде червячных винтов. Вращательные тела 24 приводятся в движение, при котором возникает составляющая силы, действующая в направлении Т перемещения, и составляющая силы, направленная вертикально вниз. Кроме того, во вариантах выполнения, представленных на Фиг. 6 и 7, вращательные тела 24 имеют наклон, что обуславливает возникновение составляющей силы, действующей в направлении Т перемещения, а также составляющей силы, направленной вертикально вниз. В указанных вариантах выполнения оси R вращения проходят горизонтально или немного под наклоном относительно горизонтального направления.
Во варианте выполнения, представленном на Фиг. 3, ось R вращения проходит вертикально. Благодаря тому, что резиновые пальцеобразные выступы выполнены в виде червячных винтов, это также обуславливает возникновение в направлении Т перемещения составляющей силы, направленной вертикально вниз. Во варианте выполнения, представленном на Фиг. 4, указанные технические возможности разделены. Благодаря первому вращательному телу 24, расположенному в направлении Т перемещения, вследствие горизонтально направленной оси R вращения и равномерного расположения резиновых пальцеобразных выступов возникает только та составляющая силы, которая направлена вертикально вниз. Благодаря следующему вращательному телу 24, расположенному на той же стороне относительно направления Т перемещения, вследствие вертикально направленной оси R вращения и равномерного расположения резиновых пальцеобразных выступов возникает только та составляющая силы, которая действует в направлении Т перемещения.
Реферат
Группа изобретений относится к птицеперерабатывающей промышленности, а именно к способу и устройству для ощипывания забитой птицы. Устройство (10) содержит средство (12) перемещения, выполненное с возможностью перемещения птицы (11), свободно подвешенной за лапки, в направлении (Т) перемещения вдоль траектории перемещения, и две боковые колодки (14, 15), отстоящие друг от друга, расположенные на противоположных сторонах от траектории перемещения и образующие канал (13). На внутренних поверхностях колодок (14, 15), обращенных друг к другу и повернутых по направлению к траектории перемещения, выполнены средства (16) ощипывания птицы (11), перемещаемой по каналу (13), причем средства (16) ощипывания выполнены с возможностью обеспечения контакта с ощипываемой птицей (11). Устройство (10) содержит стационарное средство (17) принудительного поддерживания птицы (11) при ее поступлении между двумя боковыми колодками (14, 15) и расположенными на них средствами (16) ощипывания, которое расположено в зоне (Е) поступления птицы (11) в канал (13). Обеспечивается эффективное поступление птицы между боковыми колодками и ощипывающими средствами. 2 н. и 11 з.п. ф-лы, 8 ил.
Комментарии