Устройство позиционирования для позиционирования ног домашней птицы, перемещаемых по одной в направлении перемещения вдоль секции перемещения, и способ, включающий позиционирование для удаления мяса с бедренной части ноги домашней птицы - RU2641731C1
Код документа: RU2641731C1
Чертежи
















Описание
Изобретение относится к устройству для позиционирования ног домашней птицы, перемещаемых по одной в направлении перемещения вдоль маршрута перемещения в положение обработки, которое представляет собой базовое положение обработки указанных ног, причем голень и бедро ноги соединены друг с другом посредством коленного сустава, при этом одна осевая сторона ноги, на которой расположен надколенник, определяет переднюю сторону ноги, а другая осевая сторона ноги, на которой расположена подколенная ямка, определяет заднюю сторону ноги, содержащему
- устройство перемещения, имеющее держатели, выполненные с возможностью перемещения вдоль маршрута перемещения в направлении перемещения и обеспечивающие перемещение и удерживание ног домашней птицы, при этом каждая нога удерживается в соответствующем указанном держателе за головку голеностопного сустава вдоль всего маршрута перемещения устройства позиционирования, причем держатели обеспечивают удерживание ног домашней птицы в подвешенном положении при подаче в устройство позиционирования,
- сгибающее устройство, имеющее неподвижный позиционирующий элемент, проходящий в секции сгибания ног маршрута перемещения, и позиционирующие элементы совместного перемещения, каждый из которых перемещается в направлении перемещения совместно с соответствующим указанным держателем, причем позиционирующий элемент совместного перемещения образует вместе с неподвижным позиционирующим элементом пару позиционирующих элементов, первый из которых выполнен с возможностью взаимодействия с подколенной ямкой ноги домашней птицы, а второй выполнен с возможностью упора в бедро с передней стороны ноги, и причем в указанной секции сгибания ног первый и второй позиционирующие элементы в паре образуют и определяют между собой угол сгибания, который соответствует углу подколенной ямки, уменьшается при подъеме ноги домашней птицы из исходного подвешенного положения до тех пор, пока не достигнет указанного базового положения, и обеспечивает соответствующие согнутые положения ноги домашней птицы, при этом держатели устройства перемещения выполнены с обеспечением возможности перемещения головки голеностопного сустава в держателе в соответствии с подъемом указанной ноги, и
- базовую удерживающую кромку, проходящую на протяжении маршрута перемещения, причем нога домашней птицы удерживается в области коленного сустава в заданном поднятом положении, а именно, в базовом положении.
Кроме того, изобретение относится к способу удаления в процессе перемещения мяса с бедренной части ног домашней птицы, перемещаемых в ряд в направлении перемещения, причем при помощи устройства позиционирования ногу домашней птицы располагают посредством заданного подъема и удерживания коленного сустава, в мясе ноги выполняют резы до кости в области колена указанной ноги и сдвигают от расположенного заданным образом коленного сустава к кости бедренного сустава. Голени и бедра ног домашней птицы соединены друг с другом посредством коленного сустава, и ноги домашней птицы находятся в подвешенном расположении, удерживаясь в устройстве переноса за головки голеностопных суставов.
Ноги домашней птицы, позиционирование которых обеспечивают при помощи устройства, представляют собой ноги, отделенные от туши домашней птицы и состоящие из бедра и голени.
Устройство для обработки ног домашней птицы известно из документа ЕР 0858740 А1. Устройство выполнено с позиционирующим механизмом универсального типа. Входящее в состав устройства сгибающее приспособление имеет вращающуюся несущую пластину с выемками, в каждой из которых располагают ногу птицы, укладывая в выемку коленный сустав, а именно между закрепленной (неподвижной) направляющей и опорным краем, который перемещается совместно с выемками, образуя в каждой выемке элемент позиционирования. Известное устройство требует использования круговой направляющей или направляющей карусельного типа, на нижней стороне которой выполнена несущая пластина, имеющая средства, предназначенные для ориентации бедер по существу радиально относительно оси вращения указанной пластины. Угол сгибания ноги птицы уменьшают посредством направляющей, и ногу птицы поднимают для позиционирования опорного края в подколенной ямке. Хотя место реза по коленному суставу ноги птицы обеспечено независимо от некоторых различий в длине голени, рез может быть выполнен только при помощи одного режущего приспособления, причем нога должна быть приведена в особое согнутое положение, при радиальной ориентации бедра.
Из документа DE 69100902 Т2 известно об установке, включающей прямолинейный маршрут переноса для отделения бедер от ног домашней птицы. Ноги птицы подвешивают за их предплюсневые суставы и позиционируют посредством устройства для позиционирования ног. Указанное устройство имеет позиционирующие узлы совместного перемещения, расположенные в прямолинейном направлении переноса и в зоне разрезания ноги домашней птицы взаимодействующие с направляющей планкой, которая в свою очередь взаимодействует с разделительным устройством, обеспечивающим резание.
В документе DE 60013263 Т2 (Фиг. 21 - Фиг. 28) описано устройство, в котором ноги домашней птицы располагают в пространстве между узлом держателя и режущим узлом, причем край держателя располагают под коленной чашечкой и перемещают вверх для позиционирования коленного сустава относительно режущего лезвия, расположенного на каждом режущем узле. Вместо узла держателя коленного сустава может быть предусмотрен рычаг, обеспечивающий позиционирование коленной чашечки.
Из документа DE 69100902 Т2 известен типовой способ (Фиг. 4 - Фиг. 12). Цилиндрический элемент управления устройства карусельного типа имеет множество скребковых узлов. В каждом скребковом узле, который выполнен с двумя скребками, мясо бедренной части снимают с бедренной кости ноги домашней птицы, которая подвешена за ее предплюсневой сустав на вращающемся пластинчатом подвесе. В скребковом узле ногу домашней птицы сгибают примерно под прямым углом и посредством одного из скребков приводят в воспроизводимое положение, в котором выполняют надрез с задней стороны колена. При раздвинутом положении коленного сустава, обеспечиваемом двумя скребками, надрез делают ниже надколенника. При использовании элемента, ограничивающего позиционирование, надрез всегда выполняют в одной и той же точке коленного сустава, при этом исключено разрезание надколенника. Два скребка скребкового узла перемещают по направлению к бедренному суставу, для соскабливания мяса с бедренной части. В скребковом узле мясо бедренной части может быть срезано с бедренной кости. Указанные надрезы выполняют в каждом скребковом узле, в то время как нога птицы перемещается в подвешенном положении посредством подвеса. Ноги, с бедренной части которых было удалено мясо, передают на линейный маршрут перемещения, на котором бедренную кость отрезают.
Особенность известных устройств заключается в том, что в процессе резания в области коленного сустава ногу птицы необходимо располагать и удерживать в соответствующем конкретном согнутом положении, при этом позиционирование, выполняемое в процессе резания посредством заданного сгибания ноги, перестают обеспечивать после завершения резания по коленному суставу. Считается, что такое позиционирование особенно подходит для круговой направляющей или средства перемещения карусельного типа. Круговые направляющие или устройства карусельного типа снижают скорость переноса, и возникают трудности при обеспечении соответствия маршрутов перемещения заданным областям пространства. Выполнение позиционирования коленного сустава ноги домашней птицы в конкретном согнутом положении и сохранение такого положения, взаимосвязанного с положением режущих средств, существенно ограничивает возможности обработки в связи с необходимостью выполнения реза на протяжении маршрута перемещения и в положении соответствующего сгибания ноги, при помощи специально отрегулированного режущего инструмента. Выполнение реза и/или многообразие резов ограничено.
Целями изобретения являются улучшение обработки и позиционирования ног домашней птицы, перемещаемых в ряд по маршруту перемещения, занимающему небольшое пространство. В частности, для удаления мяса с бедренной части ног птицы обеспечено оптимальное нанесение резов посредством позиционирования согласно изобретению. При этом учитываются различия в длинах ног птицы. В любом случае, резы и последующая обработка могут быть выполнены очень надежным и точным образом в заданных пунктах обработки, которые отделены друг от друга. В частности, резы могут быть выполнены в месте, независимом от динамического позиционирования. Преимущества направления по линейному пути перемещения в определенной степени используют для обеспечения высокой скорости и экономии пространства обрабатывающей установки.
Согласно изобретению указанных целей достигают в соответствии с признаками вышеуказанного устройства позиционирования, в котором
- устройство позиционирования содержит стационарное удерживающее и направляющее устройство, расположенное ниже по направлению перемещения от секции сгибания ног, при этом удерживающее и направляющее устройство удерживает каждую ногу домашней птицы в базовом положении, готовой для выполнения обработки во время ее перемещения вдоль обрабатывающей секции маршрута перемещения, причем по всей длине обрабатывающей секции перемещения удерживающее и направляющее устройство имеет стационарный удерживающий и направляющий зазор, проходящий по маршруту перемещения и имеющий кромки, на которых располагают ногу птицы в области коленного сустава для удерживания и направления в базовое положение, при этом указанная кромка по меньшей мере частично формирует указанную кромку стационарного зазора,
- секция сгибания ног и обрабатывающая секция перемещения являются линейными,
- указанное сгибающее устройство образует заводящее устройство, предназначенное для заведения ноги домашней птицы в области коленного сустава в удерживающий и направляющий зазор, причем позиционирующие элементы совместного перемещения образованы приводными нажимными элементами, при этом выполнено устройство приведения в действие и управления, которое обеспечивает перемещение каждого указанного приводного нажимного элемента в направлении перемещения и в двух измерениях, для сгибания ноги, в направлении подъема и поперек него, в направлении, в котором приводной нажимной элемент захватывает ногу снизу на одной из указанных осевых сторон данной ноги.
Указанных целей достигают согласно признакам вышеупомянутого способа, в соответствии с которым
- ноги домашней птицы перемещают в линейном направлении перемещения, при этом все манипуляции по позиционированию и обработке выполняют автоматически, причем ноги домашней птицы переносят держателями, которые выполнены с возможностью перемещения вдоль линейного маршрута перемещения и в которых ноги, каждая из которых взаимосвязана с держателем, удерживают за головку голеностопного сустава во время всей операции перемещения,
- ноги домашней птицы перемещают по линейному маршруту перемещения в двух секциях перемещения, а именно в первой секции перемещения (секции бокового перемещения), в которой ноги домашней птицы перемещают поперечным образом, при этом боковая сторона ноги является передней, и после поворота каждого держателя вокруг вертикальной оси перемещение происходит во второй секции перемещения (секции осевого перемещения), в которой ноги домашней птицы перемещают осевым образом осевой стороной ноги, на которой расположен надколенник, обращенной вперед, то есть в осевой плоскости, общей с осями бедренной кости и кости голени, при этом надколенник расположен спереди,
- в первой секции перемещения ноги птицы, перемещаемые поперечным образом, вводят для позиционирования в первый стационарный удерживающий и направляющий зазор (зазор удерживания и направления ноги поперечным образом), который проходит линейно в направлении перемещения и имеет первые стационарные кромки (кромки зазора для перемещения ноги поперечным образом), причем перемещаемая поперечным образом нога домашней птицы подвешена в первом стационарном удерживающем и направляющем зазоре в заданной точке осевого костного выступа коленного сустава посредством указанного костного выступа и, тем самым, поднята в заданное базовое положение для выполнения операций обработки вдоль первого маршрута перемещения ноги (поперечным образом), соответствующего первому удерживающему и направляющему зазору, и перемещается в направлении переноса путем скольжения по кромкам зазора на высоте коленного сустава, причем для подъема ноги головка ее голеностопного сустава удерживается подвижным образом в держателе, обеспечивающем удерживание ноги,
- на первом маршруте перемещения ноги вдоль первого стационарного удерживающего и направляющего зазора, на передней стороне ноги выполняют первый рез на высоте коленного сустава с глубиной реза до хряща (первый рез на передней стороне ноги), и на задней стороне ноги на высоте коленного сустава наносят рез с глубиной до кости коленного сустава,
- во второй секции перемещения ноги птицы, перемещаемые осевым образом, вводят для позиционирования во второй стационарный удерживающий и направляющий зазор (зазор удерживания и направления ноги осевым образом), который проходит линейно в направлении перемещения и имеет две стационарных кромки (кромки зазора для перемещения ноги осевым образом), причем во втором стационарном удерживающем и направляющем зазоре перемещаемая осевым образом нога домашней птицы подвешена в заданной точке бокового костного выступа коленного сустава посредством данного костного выступа и, тем самым, поднята в заданное базовое положение для выполнения операций обработки вдоль второго маршрута перемещения ноги, соответствующего второму, удерживающему и направляющему зазору, и перемещается в направлении перемещения путем скольжения по кромкам зазора на высоте коленного сустава, причем для подъема ноги головка ее голеностопного сустава удерживается подвижным образом в держателе, обеспечивающем удерживание ноги, и
- на втором маршруте перемещения ноги вдоль второго стационарного удерживающего и направляющего зазора выполняют пару первых боковых резов на боковых сторонах ноги на высоте ее коленного сустава с глубиной реза до хряща кости, и затем выполняют пару вторых боковых резов на боковых сторонах ноги под коленным суставом с глубиной реза до бедренной кости, и мясо бедренной части стягивают по кости бедренного сустава к проксимальному концу бедренной кости.
В соответствии с предложенным изобретением достигают ряда преимуществ.
В секции сгибания ногу птицы перемещают и сгибают в колене. В любом случае стационарное удерживающее и направляющее устройство, расположенное ниже по направлению перемещения секции сгибания ног согласно изобретению, образовано вдоль линейного маршрута перемещения посредством стационарного удерживающего и направляющего зазора. Базовое положение ноги птицы обеспечено вдоль маршрута перемещения до, после и на месте единственного или каждого места обработки. В ходе скользящего перемещения по удерживающему и направляющему зазору имеет место статическое (постоянное) позиционирование коленного сустава, обеспечиваемое по меньшей мере одним базовым положением, в отличие от динамического (изменяющегося, непостоянного) позиционирования коленного сустава вдоль секции сгибания ног. Базовое позиционирование не зависит от места обработки, например, места приложения режущего инструмента, и ориентации ноги птицы. Например, это означает, что подвешенная в удерживающем и направляющем зазоре нога птицы может быть расположена в более или менее распрямленном или согнутом положении, которое определяется коленным суставом. Удерживающий и направляющий зазор проходит по меньшей мере по существу линейно и преимущественно может быть образован зазором или пазом между двумя направляющими пластинами, направляющими рейками или т.п.
Ширина зазора по меньшей мере по существу одинакова вдоль маршрута перемещения. Это понимают так, что ширина зазора одинакова по меньшей мере в одной секции или и сужается до определенной степени в направлении перемещения по меньшей мере в одной секции, в частности, во входной секции. В любом случае, ширина зазора по всей его длине такова, что в удерживающем и направляющем зазоре коленный сустав подвешен в базовом положении и, тем самым, подвешен заданным образом по меньшей мере у одной кромки зазора.
Кроме того, подвешивание ноги домашней птицы, с которой не удалено мясо, посредством удерживающего и направляющего зазора выполнено таким образом, что нога скользит вдоль указанного зазора или по его кромкам. В частности, удерживающий и направляющий зазор может быть выполнен горизонтально, а именно, на одинаковой высоте относительно ряда перемещающихся держателей, либо относительно осевого размера ног птицы. Кроме того, что касается осевой высоты ног птицы, удерживающий и направляющий зазор может проходить до некоторой степени наклонным или изогнутым образом относительно длины ног. Указанная линейная протяженность, если вообще имеет место, означает, что суставы птицы в любом случае продолжают перемещаться в вертикальной плоскости, то есть, направлении следования зазора, немного вниз или вверх, но не боковым или горизонтальным образом поперек указанных направлений.
В любом случае, нога птицы удерживается на заданной базовой высоте во время транспортировки к концу удерживающего и направляющего зазора. Одна или каждая заданная высота расположения коленного сустава вдоль удерживающего и направляющего зазора, который, в частности, остается на одной и той же высоте, обеспечивает одно или каждое заданное базовое положение ноги птицы по меньшей мере в одном и, в частности, одном ряду пунктов обработки вдоль указанного зазора. Удерживающий и направляющий зазор или его кромки по сами по себе не являются частью обрабатывающего инструмента либо не имеют обрабатывающих элементов. Линейное скользящее перемещение ноги птицы в базовом положении, которое установлено и сохраняется в процессе скольжения в удерживающем и направляющем зазоре, обеспечивает сравнительно высокую скорость перемещения, причем во время транспортировки, преимущественно, может быть обеспечена точная обработка ноги в нескольких пунктах обработки, расположенных в ряд вдоль указанного зазора. Таким образом, базовое позиционирование сохраняется независимо от того, подвергается ли нога птицы дополнительному воздействию сверху и/или снизу со стороны удерживающего и направляющего зазора посредством ориентирующих, несущих или опорных элементов, которые обеспечивают перенос, ориентацию или сгибание данной ноги, а именно, например, посредством элементов скольжения и/или противодействующих несущих элементов, совместно проходящих в направлении перемещения, которые взаимодействуют с ногой птицы ниже или выше по ходу движения. В любом случае, перемещение во время линейной базовой транспортировки выполняется посредством держателей устройства перемещения, которые перемещаются соответственно линейным образом.
Подвешивание ноги домашней птицы на соответствующем держателе выполнено таким образом, что, несмотря на то, что головка голеностопного сустава (предплюсневой сустав) для перемещения остается во взаимодействии с держателем вдоль удерживающего и направляющего зазора, она удерживается таким образом, что по существу может свободно перемещаться по высоте или в осевом направлении ноги птицы для обеспечения возможности смещения. В частности, держатели могут быть образованы зажимами, открытыми в верхней части, в которые головка голеностопного сустава захватывается и поднимается при подъеме ноги птицы.
Посредством удерживающего и направляющего зазора ноги птицы перемещают в линейном направлении маршрута перемещения в процессе всех автоматических манипуляций, выполняемых для обработки. Для последовательной обработки всех ног птицы, каждая манипуляция может быть выполнена одним и тем же устройством, предназначенным для выполнения соответствующей операции.
Сгибающее устройство, выполненное на маршруте перемещения перед удерживающим и направляющим зазором, обеспечивает заведение коленного сустава ноги птицы в указанный зазор. Эта операция сочетается со специальными действиями по сгибанию ноги птицы, выполняемыми согласно изобретению. С одной стороны, важную роль играют специальные отдельные элементы совместного перемещения. Указанные элементы являются приводными нажимными элементами, а именно, элементами, которые выполнены с возможностью перемещения во множестве направлений посредством по меньшей мере одного активного автономного привода. Указанное двухмерное перемещение в направлении подъема, а также поперек направления подъема имеет место в осевой плоскости, в которой в любом случае по существу проходят оси бедренной кости и кости голени ноги птицы. Более того, приводной нажимной элемент при этом перемещается в направлении перемещения. Так, посредством подъемных/поперечных движений в осевой плоскости нога птицы все больше и больше смещается или отклоняется в процессе сгибания при позиционировании, что имеет место при транспортировке в направлении перемещения.
Приводное и управляющее устройство, обеспечивающее направление перемещение позиционирующего элемента совместного перемещения, может быть образовано, к примеру, тяговым приводом, например, с ремнем, лентой или цепью, либо посредством того же устройства с учетом характеристики управления, например, обеспечиваемой механическим устройством направляющей и кулачка. Важно, что позиционирующий элемент совместного перемещения перемещается в упомянутой осевой плоскости костей ноги птицы посредством составляющих движения, которые предпочтительно являются ускоряющими, то есть нарастающими.
Позиционирующий элемент совместного перемещения работает во взаимодействии с неподвижным позиционирующим элементом, образуя функциональную пару. Неподвижный позиционирующий элемент проходит в секции сгибания вдоль маршрута перемещения. В отличие от каждого позиционирующего элемента совместного перемещения неподвижный позиционирующий элемент закреплен в фиксированном местоположении или области местоположений. Например, указанный элемент прикреплен к раме или каркасу позиционирующего устройства. При этом стационарное устройство следует понимать в том смысле, что неподвижный позиционирующий элемент выполнен с возможностью перемещения в локальной области (насколько он ограничен указанной областью) в направлениях указанной осевой плоскости костей ноги птицы, например, под действием упругих сил или в этой связи также посредством привода, и всегда таким образом, что сгибание ноги птицы происходит, с одной стороны, между неподвижным позиционирующим элементом, и, с другой стороны, каждым позиционирующим элементом совместного перемещения. Например, допустимо, что на участке секции сгибания неподвижный позиционирующий элемент поднимается поперечным образом относительно направления перемещения. Учитывается и перемещение неподвижного элемента против перемещения, выполняемого позиционирующим элементом совместного перемещения для сгибания ноги. Неподвижный позиционирующий элемент может, опционально, работать, в частности, против действия упругой силы, до тех пор пока сгибающее действие выполняется во взаимодействии с позиционирующим элементом совместного перемещения, движущимся в двух измерениях в осевой плоскости костей ноги птицы.
Согласно изобретению, сгибающее устройство выполнено с обеспечением подвешивания каждой из перемещаемых в ряд ног птицы за ее коленный сустав в определенном местоположении в зазор и последовательного заведения в него в начале удерживающего и направляющего зазора. С одной стороны, ширина удерживающего и направляющего зазора может быть отрегулирована в соответствии с костным выступом коленного сустава перемещаемой в осевом направлении ноги птицы, а с другой стороны - с перемещаемой поперечным образом ногой птицы. Далее будет приведено более подробное описание перемещения осевым и боковым образом. Согласно изобретению, заведение ноги в местоположении, соответствующем определенной высоте, возможно благодаря тому, что нога птицы (начиная от более или менее вытянутой ориентации, которая является результатом подвешивания ноги за ее голеностопный сустав) приводится в чрезмерно согнутое положение. Сгибание сопровождается подъемом ноги птицы, при этом в процессе подъема коленный сустав находится ниже удерживающего и направляющего зазора. В частности, перемещение ног птицы боком имеет место вдоль указанного сужающегося удерживающего и направляющего зазора. С другой стороны, удерживающий и направляющий зазор одинаковой ширины очень хорошо подходит для осевого перемещения ног.
Доступ к ногам птицы для их обработки обеспечен без каких-либо специальных требований к ориентации ног, и указанные ноги могут быть расположены в разных заданных ориентациях. Обработка может быть выполнена преимущественно во множестве пунктов обработки, которые могут быть выполнены и расположены согласно требованиям, предъявляемым к процессу обработки.
Согласно варианту изобретения, имеющему отношение к способу, ноги птицы перемещают по двум линейным маршрутам, предпочтительно ориентированным совместно в линейном направлении перемещения, к двум взаимосвязанным секциям перемещения для удаления мяса бедренной части. Мясо бедренной части ноги птицы удаляют от костей для получения мясного филе. Согласно изобретению важно, чтобы резы, выполняемые при подготовке к стягиванию или удалению мяса с бедра, были распределены между двумя секциями перемещения. Этого достигают путем заведения и подвешивания ног птицы в каждой из двух секций перемещения в соответствующем стационарном удерживающем и направляющем зазоре, причем таким образом каждая нога удерживается в базовом положении и перемещается скольжением вдоль соответствующего удерживающего и направляющего зазора.
Нога птицы перемещается поперечным образом вдоль первой секции перемещения (секции поперечного перемещения). Перемещение поперечным образом (которое также называют боковым перемещением), как правило, определяется тем, что в процессе перемещения нога птицы проходит или ориентирована с обращенной вперед одной из ее боковых сторон. В результате данной ориентации и установки базового положения коленного сустава посредством соответствующей направляющей зазора бокового перемещения, заданным образом может быть нанесен первый рез на передней стороне ноги на высоте ее коленного сустава с глубиной до хряща, при этом рез, предпочтительно, смещен в направлении перемещения к концу зазора в направлении перемещения, а также рез, выполняемый на задней стороне ноги на высоте ее коленного сустава с глубиной реза до кости коленного сустава.
Вдоль последующей второй секции перемещения (секция осевого перемещения) нога птицы перемещается осевым образом надколенником вперед. Осевое перемещение означает, что во время переноса ноги птицы осевая сторона ноги, на которой расположен надколенник, ориентирована вперед или расположена спереди. Таким образом, оси ноги, а именно ось бедра ноги и ось голени ноги, лежат по меньшей мере по существу в общей осевой плоскости, которая в данном случае проходит в направлении перемещения, то есть при любом угле сгиба между бедром и голенью. Важно, чтобы в результате данной ориентации и направления на маршруте перемещения во втором зазоре (зазор осевого перемещения), было установлено второе базовое положение, подобно первому базовому положению, уже описанному ранее. В данном втором базовом положении, в дополнение и в соответствии с резами, выполненными на маршруте перемещения в первом зазоре, на двух боковых сторонах ноги и на высоте ее коленного сустава в точных местоположениях выполняют пару первых боковых резов с глубиной до костного хряща, а затем пару вторых боковых резов под коленным суставом с глубиной резов до бедренной кости. При базовом позиционировании ноги птицы в первом положении (положении перемещения боком), а затем во втором положении (положении перемещения осевым образом) и последовательном выполнении указанных взаимосвязанных резов, может быть обеспечено точное нанесение резов с точки зрения положения, глубины реза и, следовательно, соответствия друг другу в области коленного сустава, для удаления мяса бедренной части. Данный способ, который предпочтительно выполняют на поточной линейной линии обработки, обеспечивает перемещение со сравнительно высокой скоростью. Установка, в которой применяют указанные секции перемещения, может быть выполнена без использования криволинейных, круговых маршрутов или станций карусельного типа.
Один вариант выполнения заключается в выполнении устройства приведения в действие и управления позиционирующими элементами совместного перемещения таким образом, что после того, как нога птицы заведена в удерживающий и направляющий зазор обрабатывающей секции перемещения, позиционирующий элемент совместного перемещения отстает относительно направления переноса или перемещается в обратном направлении маршрута перемещения с обеспечением устранения согнутого положения или обеспечения положения с меньшим сгибом ноги. В частности, он выходит из взаимодействия с ногой птицы. Нога птицы может удерживаться только за коленный сустав, подвешенный в удерживающем и направляющем зазоре без взаимодействия элементов для ориентации или опоры ноги на голени или бедре, но при этом головка голеностопного сустава ноги птицы всегда взаимодействует с соответствующим держателем для ее перемещения. Согласно одному варианту выполнения, устройство выполнено таким образом, что позиционирующий элемент совместного перемещения выводится из положения, которое обеспечивает согнутое состояние ноги, необходимое для заведения на входе в удерживающий и направляющий зазор.
Для перемещения каждого позиционирующего элемента, устройство приведения в действие и управления позиционирующими элементами совместного перемещения может быть выполнено с обеспечением возможности осуществления по меньшей мере поворотного перемещения и по меньшей мере линейного перемещения, причем перемещения, обеспечивающие перемещение указанного позиционирующего элемента, суммируются. В частности, прямолинейное перемещение осуществляется в направлении перемещения для совместного перемещения в указанном направлении. Поворотное и/или криволинейное перемещение, которое, опционально, может быть линейным, целесообразно осуществлять для двухмерного, предпочтительно плавного, подъема и смещения позиционирующего элемента в упомянутой ранее осевой плоскости.
Обрабатывающая секция перемещения удерживающего и направляющего устройства, преимущественно, имеет по меньшей мере два пункта обработки. Указанные пункты, предпочтительно, расположены друг против друга на маршруте перемещения. При этом, для проведения абсолютно точной, но, тем не менее, компактной обработки, операции обработки не связаны друг с другом для исключения взаимного влияния, что обеспечено путем смещения взаимно противолежащих пунктов обработки вдоль маршрута перемещения. Преимущественно, два режущих инструмента расположены в паре со смещением вдоль маршрута выполнения резания, при этом указанные инструменты обеспечивают выполнение резов на коленном суставе по меньшей мере с двух противоположных сторон ноги. Данные резы могут быть выполнены локально и с точной глубиной резания, так что нога птицы разрезана точно в заданном месте или хрящ и кость остаются неповрежденными.
В пределах протяженности удерживающего и перемещающего зазора нога птицы, удерживаемая в базовом положении и направляемая скольжением, может быть легко ориентирована в соответствии с пунктами обработки и/или операциями обработки. В одном варианте выполнения позиционирующее устройство имеет (по меньшей мере в части обрабатывающей секции перемещения удерживающего и направляющего устройства) первые совместно перемещающиеся толкающие или опорные элементы, которые проходят совместно с держателями и упираются над удерживающим и направляющим зазором в ноги птицы выше и/или ниже по потоку. Вместо этого или в качестве дополнения, в одном варианте выполнения позиционирующее устройство имеет (по меньшей мере в части обрабатывающей секции перемещения удерживающего и направляющего устройства) вторые совместно перемещающиеся толкающие или опорные элементы, которые проходят совместно с держателями и упираются под удерживающим и направляющим зазором в ноги птицы выше и/или ниже по потоку.
В одном конкретном варианте выполнения устройства позиционирования (устройства осевого позиционирования) согласно изобретению
- устройство перемещения расположено и выполнено с возможностью обеспечения держателями осевого перемещения ног с осевой стороной ноги, на которой расположен надколенник, обращенной вперед, а именно в осевой плоскости, общей с осями бедренной кости и кости голени,
- в каждой паре позиционирующих элементов указанный первый позиционирующий элемент, выполненный с возможностью взаимодействия с подколенной ямкой ноги птицы, является позиционирующим элементом совместного перемещения из группы позиционирующих элементов совместного перемещения, и указанный второй позиционирующий элемент, выполненный с возможностью упора в бедро на передней стороне ноги, образован неподвижным позиционирующим элементом, и
- стационарный удерживающий и направляющий зазор удерживающего и направляющего устройства образован зазором для направления коленной кости (осевой направляющий зазор), выполненным для обеспечения возможности осевого перемещения, и имеет ширину зазора, отрегулированную в соответствии с костным выступом коленного сустава перемещаемого надколенником вперед с обеспечением подвешивания ноги птицы в указанном зазоре для направления коленной кости посредством данных выступов коленного сустава в заданной точке указанных выступов и направления скольжением по ходу перемещения по кромкам указанного зазора,
- при этом позиционирующие элементы, взаимодействующие как пара во время сгибания и подъема, выполнены с обеспечением возможности заведения и подвешивания ноги птицы в зазоре для направления коленной кости с наколенником, расположенным впереди.
Существует устройство, в котором перемещаемые осевым образом ноги птицы стабилизируют для выполнения точной обработки, в частности, по их боковым сторонам.
В одном варианте выполнения устройства осевого позиционирования неподвижный позиционирующий элемент расположен и выполнен таким образом, что в начале зазора для направления коленной кости указанный элемент перестает упираться в бедро ноги птицы.
Неподвижный позиционирующий элемент, предпочтительно, может быть образован неподвижной наклонной плоскостью заводящего устройства для осевого позиционирования, наклонная направляющая которого по меньшей мере частично ориентирована вверх в направлении перемещения, так что бедро с передней стороны ноги птицы проходит по нижнему направляющему участку наклонной плоскости и покидает наклонную плоскость через расположенный на возвышении направляющий участок. Данная наклонная плоскость может иметь очень простой вид, обеспечивающий, при этом, особенно эффективное взаимодействие с каждым позиционирующим элементом совместного перемещения для сгибания и заведения ноги птицы в зазор. В предпочтительном виде наклонная направляющая разделена в направлении переноса по меньшей мере на два направляющих участка, причем верхний или самый высокий участок, который расположен ближе всего к удерживающему и направляющему устройству, выполнен плоским, в отличие от по меньшей мере одного предшествующего направляющего участка.
Для осевого перемещения ноги птицы в устройстве осевого сгибания, каждый позиционирующий элемент совместного перемещения может иметь особую конфигурацию. Так, согласно одной конфигурации каждый позиционирующий элемент совместного перемещения образован по меньшей мере одним элементом для толкания подколенной ямки, который взаимодействует с указанной ямкой, причем устройство приведения в действие и управления выполнено с обеспечением, после вхождения ноги птицы в позиционирующее устройство, нажимания элементом для толкания на подколенную ямку ноги птицы и затем, в соответствии с перемещением ноги, обеспечиваемым неподвижным позиционирующим элементом, и его перемещением и направлением, предпочтительно при продолжающемся взаимодействии с подколенной ямкой, с обеспечением в ходе толкания и увеличения угла сгиба ноги опережения элементом для толкания держателя, на котором подвешена нога, в частности, с ускорением.
Очень четкая операция позиционирования может быть достигнута при условии, что устройство приведения в действие и управления выполнено с обеспечением возможности перемещения элемента для толкания подколенной ямки, при поступлении перемещаемой осевым образом ноги птицы в устройство осевого позиционирования, из положения под указанной ямкой в саму ямку. Для достижения такой ориентации или позиционирования ноги птицы для обработки, при которой нога свободна от указанного толкающего элемента, согласно одному варианту выполнения устройства приведения в действие и управления элемент для толкания подколенной ямки остается в области удерживающего и направляющего устройства ниже зазора для направления коленной кости, где отстает, по меньшей мере на отрезке участка, от перемещаемой ноги птицы или перемещается в обратном направлении относительно маршрута перемещения. Смещение обеспечено в результате того, что элемент для толкания подколенной ямки, для устранения согнутого положения перемещаемой осевым образом ноги птицы, выведен из взаимодействия с указанной ногой. Смещение может быть выполнено с обеспечением перемещения ноги в заданное, менее согнутое положение при упоре элемента для толкания подколенной ямки в указанную ногу.
Согласно следующему варианту, сгибающее устройство устройства для осевого позиционирования имеет по меньшей мере один фиксирующий позиционирующий элемент, который в области участка второго, а именно неподвижного позиционирующего элемента, и совместно с ним взаимодействует с передней стороной перемещаемой осевым образом ноги птицы. Данное взаимодействие является временным и выполняется таким образом, что нога птицы в области ее коленного сустава усилием противоположным направлению перемещения прижимается к первому позиционирующему элементу совместного перемещения, который был перемещен в подколенную ямку. Фиксирующий позиционирующий элемент преимущественно расположен в начале секции сгибания ноги и/или на более крутом участке наклонной плоскости, по меньшей мере по сравнению с верхним участком. Согласно одному варианту выполнения фиксирующего позиционирующего элемента он имеет по меньшей мере один нажимающий элемент, который работает, например раскрывается, при нажатии на него в направлении перемещения против действия упругого возвращающего усилия и, тем самым, освобождает проход для ноги птицы. Например, данный нажимной элемент может быть образован по типу распашной двери.
Устройство для осевого позиционирования, выполненное с возможностью перемещения ног птицы осевым образом, как указано, вдоль линейного маршрута перемещения может, как правило, иметь особенно преимущественную конфигурацию для нанесения боковых резов. При этом, могут быть выполнены, преимущественно в обрабатывающей секции перемещения удерживающего и направляющего устройства, первая стационарная станция для выполнения боковых резов, которая образована первой парой первых боковых режущих средств, преимущественно расположенных со смещением вдоль маршрута перемещения, которые, ниже удерживающего и направляющего зазора, обеспечивают выполнение первых боковых резов на боковых сторонах ноги птицы на высоте коленного сустава с глубиной реза до костного хряща.
Устройство для осевого позиционирования, которое выполнено с указанной первой стационарной станцией для выполнения боковых резов, преимущественно, может быть оснащено дополнительными инструментами. Преимущественно, выполнен инструмент, посредством которого с ноги птицы стягивают или соскребают мясо бедренной части. В частности, его форма такова, что станция удаления мяса с бедренной части расположена в обрабатывающей секции перемещения удерживающего и направляющего устройства, после первой станции для выполнения боковых резов, при этом станция удаления имеет средства для удаления мяса, которые выполняют совместное перемещение в направлении перемещения. Станция удаления, преимущественно, содержит вторую стационарную станцию для выполнения боковых резов, имеющую вторую пару вторых режущих средств для нанесения боковых резов, при этом указанные средства, в частности, расположены со смещением вдоль маршрута перемещения. Вторые режущие средства для нанесения боковых резов, ниже удерживающего и направляющего зазора, обеспечивают выполнение вторых боковых резов под коленным суставом на боковых сторонах ноги птицы с глубиной реза до бедренной кости, и каждое средство для удаления мяса обеспечивает стягивание мяса с бедренной части к проксимальному концу бедренной кости.
В конкретном варианте выполнения станции удаления, совместно перемещающиеся средства для удаления мяса образуют опорное и удерживающее средство, которое достигает бедра вблизи коленного сустава выше по направлению перемещения от по меньшей мере одной обрабатывающей станции, расположенной до станции удаления (пункт удаления). Указанные средства, преимущественно, достигают бедра до нанесения вторых боковых резов.
Позиционирующее устройство, предпочтительно, выполнено таким образом, что третьи стационарные режущие средства расположены ниже по направлению перемещения от станции удаления, при этом указанные третьи средства обеспечивают отделение мяса от бедренной кости на ее проксимальном конце.
Устройство осевого позиционирования, имеющее станцию удаления, может быть выполнено со стационарными режущими средствами, взаимосвязанными с указанной станцией, при этом режущие средства, предпочтительно, расположены в конце зазора для направления коленной кости и обеспечивают отделение бедренной кости, с которой удалено мясо, от голени ноги птицы, несущей мясо, предпочтительно посредством реза, выполняемого спереди на передней стороне ноги, в частности, по коленному суставу.
Устройство осевого позиционирования, имеющее одну или более обрабатывающих станций, в частности первую стационарную станцию для выполнения боковых резов, а в некоторых случаях дополнительно имеющее вторую стационарную станцию для выполнения боковых резов и станцию удаления, в каждом случае образует независимое устройство, которое в качестве модульного блока может входить в состав поточной обрабатывающей линии.
В другом конкретном варианте позиционирующего устройства согласно изобретению, в котором вместо осевого перемещения предусмотрено боковое (поперечное) перемещение (устройство бокового позиционирования):
- устройство перемещения расположено и выполнено с возможностью обеспечения перемещения держателями ног птицы поперечным образом, при этом одна из двух боковых сторон ноги обращена вперед,
- указанный первый позиционирующий элемент, выполненный с возможностью взаимодействия с подколенной ямкой, представляет собой неподвижный позиционирующий элемент, образованный позиционирующей кромкой, которая, предпочтительно, является частью кромки, проходящей вдоль маршрута перемещения позиционирующего устройства, предпочтительно, непрерывным образом в устройстве позиционирования,
- указанный второй позиционирующий элемент, выполненный с возможностью обеспечения упора в бедро на передней стороне ноги, представляет собой позиционирующий элемента совместного перемещения из группы позиционирующих элементов совместного перемещения, который взаимодействует в паре с неподвижным позиционирующим элементом,
- стационарный удерживающий и направляющий зазор (боковой удерживающий и направляющий зазор) удерживающего и направляющего устройства (боковое удерживающее и направляющее устройство) образован зазором для направления коленной кости (боковой зазор), при этом ширина зазора отрегулирована в соответствии с костным выступом коленного сустава перемещаемой в поперечном направлении ноги птицы с обеспечением подвешивания указанной ноги в заданной точке данного выступа в указанном зазоре для направления коленной кости посредством указанного выступа и направления в направлении перемещения скольжением по кромкам данного зазора,
- при этом позиционирующие элементы, которые взаимодействуют в паре во время сгибания и подъема ноги, выполнены с обеспечением возможности заведения, а именно для подвешивания перемещаемой в поперечном направлении ноги птицы в зазор для направления коленной кости, при этом
- указанная кромка для удерживания в базовом положении разделена вдоль маршрута перемещения позиционирующего устройства на два участка, а именно на первый участок кромки для удерживания в базовом положении, который является частью указанной секции сгибания (секции бокового сгибания) и образует ее стационарную позиционирующую кромку, и следующий за ним второй участок кромки для удерживания в базовом положении, образующий одну кромку указанного зазора для направления коленной кости удерживающего и направляющего устройства.
Устройство для бокового позиционирования согласно изобретению, в котором ноги птицы перемещают поперечным образом, обеспечивает приведение ноги птицы, в частности по ее осевым сторонам, а именно по передней и задней стороне колена, в точные положения обработки, в частности для выполнения множества обрабатывающих манипуляций. В данном случае также важно, что динамическое позиционирование ноги птицы обеспечивают в секции сгибания в ходе очень четкой и целевым образом управляемой операции, а базовое позиционирование обеспечивают вдоль проходящего вниз по направлению перемещения стационарного удерживающего и направляющего зазора. Базовое позиционирование может поддерживаться по меньшей мере на одном участке скольжения удерживающего и направляющего зазора, независимо от позиционирования при сгибании/заведении. Другие требуемые положения транспортировки или обработки могут быть обеспечены в результате устранения согнутого положения заведения или при менее согнутом положении.
В предпочтительном варианте позиционирующего устройства с поперечным переносом, устройство приведения в действие и управления позиционирующим элементом совместного перемещения выполнено с обеспечением возможности выхода из взаимодействия с ногой птицы по меньшей мере на одном участке, в частности концевом участке обрабатывающей секции перемещения удерживающего и направляющего устройства для устранения согнутого положения указанной ноги.
Особую конструкцию сгибающего устройства устройства бокового позиционирования обеспечивают посредством прижимной и несущей опоры, которая выполняет совместное перемещение в направлении перемещения. При этом устройство бокового позиционирования имеет совместно перемещающиеся боковые толкающие элементы, взаимосвязанные с позиционирующими элементами совместного перемещения, и выполнено с возможностью формирования элементом совместного перемещения и совместно перемещающимся боковым толкающим элементом, в каждом случае в паре, совместно перемещающейся прижимной и несущей опоры, причем совместно перемещающийся толкающий элемент взаимодействует с боковой стороной ноги, которая расположена выше по направлению перемещения, то есть удалена от удерживающего и направляющего устройства, путем толкающего контакта в области бедра ноги птицы, при этом элемент совместного перемещения обеспечивает перемещение для подъема и большего сгибания ноги поперек направления перемещения. Прижимная и несущая опора может быть выполнена с обеспечением возможности поддержания совместно перемещающимся боковым толкающим элементом толкающего или поддерживающего контакта с указанной боковой стороной ноги птицы, по меньшей мере вдоль участка удерживающего и направляющего зазора и, в частности, выхода из данного контакта только на конце указанного зазора.
В следующем варианте позиционирующий элемент совместного перемещения, в частности, из группы указанных элементов устройства бокового позиционирования, имеет вид рычажного элемента, имеющего два рычажных участка, а именно первый рычажный участок, который по существу взаимодействует с передней стороной ноги при перемещении поперек направления перемещения, и второй рычажный участок, который по существу упирается в бедро на боковой стороне ноги, которая расположена ниже по направлению перемещения, то есть обращенной к удерживающему и направляющему устройству. Данный вид позиционирующего элемента совместного перемещения устройства бокового позиционирования, преимущественно, обеспечивает упор в бедро на передней стороне левых ног птицы, которые перемещаются боковой наружной стороной ноги вперед. Для обеих ног птицы и, в частности, только для правой ноги, перемещаемой внутренней стороной ноги вперед, позиционирующий элемент совместного перемещения может представлять собой контактный элемент, имеющий только одну контактную поверхность, которая взаимодействует по меньшей мере по существу только с передней стороной ноги.
Согласно одному варианту выполнения устройства бокового позиционирования оно имеет стационарную направляющую начального позиционирования, проходящую на начальном участке маршрута перемещения, при этом указанная направляющая взаимосвязана с позиционирующим элементом совместного перемещения, в нее упирается передняя сторона ноги птицы в области бедра, и она обеспечивает направление ноги поперек направления перемещения к неподвижному позиционирующему элементу, до тех пор, пока указанный элемент не упрется в ногу птицы.
В следующем варианте указанного начального участка маршрута бокового перемещения, обеспечивающего перемещение в поперечном направлении, неподвижный позиционирующий элемент образован вдоль входной части секции сгибания ног устройства бокового позиционирования, кромка которой имеет клиновидное поперечное сечение, соответствующее выемке между голенью и бедром, образующейся при поступлении ноги птицы в устройство позиционирования.
В частности пара ног птицы, а именно правая и левая ноги, одновременно перемещаются в устройстве позиционирования или устройствах согласно изобретению. Затем пара ног птицы подвешивается известным, по существу, образом на сдвоенном держателе. При поперечном перемещении левые и правые ноги поступают в устройство позиционирования в чередующемся порядке. При осевом перемещении левые и правые ноги перемещаются в устройстве позиционирования в два параллельных ряда. Между перемещениями в поперечном и осевом направлении сдвоенные держатели поворачиваются на 90° в поворотной станции. Таким образом, элементы, детали или узлы каждого устройства позиционирования согласно изобретению соответствующим образом приспособлены для поперечного перемещения в рядах или перемещения параллельного оси.
Особое внимание будет уделено приведенным далее вариантам способа согласно изобретению. На втором маршруте перемещения, соответствующем второму удерживающему и направляющему зазору, преимущественно, выполняют боковые резы по меньшей мере одной указанной пары ног, с противоположных сторон маршрута и со смещением вдоль него. В одном варианте, на маршруте перемещения вдоль второго зазора вторые боковые резы выполняют под коленным суставом в области передней стороны ноги.
На маршруте перемещения по первому зазору может быть выполнен второй рез на передней стороне, непосредственно под коленным суставом с глубиной реза до бедренной кости, причем на маршруте перемещения по второму зазору наносят вторые боковые резы, расположенные на той же высоте ноги птицы, что и второй рез на передней стороне, выполняемый на маршруте перемещения по первому зазору.
Установлено, что данный второй рез на передней стороне ноги, выполняемый на маршруте перемещения по первому зазору, можно не выполнять, в частности, когда согласно следующему варианту способа вторые боковые резы, выполняемые на маршруте перемещения по второму зазору, располагают под коленным суставом в области передней стороны ноги.
Во второй секции перемещения на маршруте перемещения по второму зазору предпочтительно может быть расположена дополнительная обрабатывающая станция для отделения от кости мяса ноги птицы (филетирования), причем в каждом случае коленный сустав ноги, за который она подвешена с возможностью скольжения в удерживающем и направляющем зазоре, представляет собой базовую точку, в частности для высотного положения ноги птицы для всех этапов обработки, а именно для резания, снятия мяса, а также для снятия кожи. В частности, во второй секции перемещения может быть удалено мясо бедренной части, сдвинутое к кости тазобедренного сустава. Дополнительный преимущественный вариант способа заключается в резании ноги птицы, преимущественно на конце второй секции перемещения, предпочтительно, на высоте коленного сустава, для отделения голени от бедра, с которого удалено мясо.
Для подвешивания во втором стационарном удерживающем и направляющем зазоре, каждая перемещаемая осевым образом нога птицы, преимущественно, может быть заведена в указанный зазор путем ее сгибания и подъема на втором участке перемещения вдоль второй секции сгибания ног, расположенной перед данным зазором. Положения сгибания определяются углом сгиба, соответствующим углу подколенной ямки между бедром и голенью, при этом в процессе подъема указанный угол уменьшается. Данный способ преимущественно выполняют при использовании указанного устройства осевого позиционирования, которое, как описано выше, предназначено, в частности, для переноса, позиционирования и обработки.
Согласно следующему варианту способа, для подвешивания в первом стационарном удерживающем и направляющем зазоре, каждую ногу птицы, перемещаемую поперечным образом, сгибают и поднимают поперек направления переноса на первом участке вдоль первой секции сгибания ног, которая расположена перед указанным первым зазором, причем положения сгибания определяются углом сгиба, соответствующим углу подколенной ямки между бедром и голенью, при этом в процессе подъема указанный угол уменьшается. Данный способ преимущественно выполняют при использовании указанного устройства бокового позиционирования, которое, как описано выше, предназначено, в частности, для переноса, позиционирования и обработки.
Согласно еще одному варианту, по меньшей мере на участке указанного удерживающего и направляющего зазора обработку выполняют по существу на не согнутой ноге, подвешенной в соответствующем удерживающем и направляющем зазоре. В таком случае исключаются положения заведения с согнутой ногой.
Зависимые пункты формулы изобретения относятся к описанным вариантам выполнения изобретения и к другим предпочтительным и преимущественным вариантам выполнения. В приведенном ниже описании вариантов выполнения, изображенных на схематических чертежах, более подробно представлены только особенно предпочтительные и преимущественные варианты и возможности. Следует понимать, что каждый отдельный вариант или деталь, описанные в рамках варианта выполнения, являются независимым конкретизирующим примером для других вариантов выполнения и вариантов, которые не были описаны или были описаны не в полной мере и которые не выходят за пределы объема изобретения.
На чертежах:
На Фиг. 1А/1В - Фиг. 5А/5B в каждом случае показаны продольный вид и вид в аксонометрии первого устройства позиционирования (устройство бокового позиционирования) согласно изобретению с перемещаемой ногой птицы в пяти положениях переноса,
на Фиг. 6А/6В - Фиг. 17А/17B в каждом случае представлены продольный вид и вид в аксонометрии второго устройства позиционирования (устройство осевого позиционирования) с перемещаемой ногой птицы в трех положениях заведения при согнутой ноге, а также в последующих положениях обработки,
на Фиг. 18 изображен вид сбоку частично согнутой ноги птицы, и
на Фиг. 19 изображена схема на виде сверху устройства позиционирования согласно изобретению, которое образовано устройством бокового позиционирования согласно изобретению и расположенного после него и соединенного с ним устройства осевого позиционирования согласно изобретению.
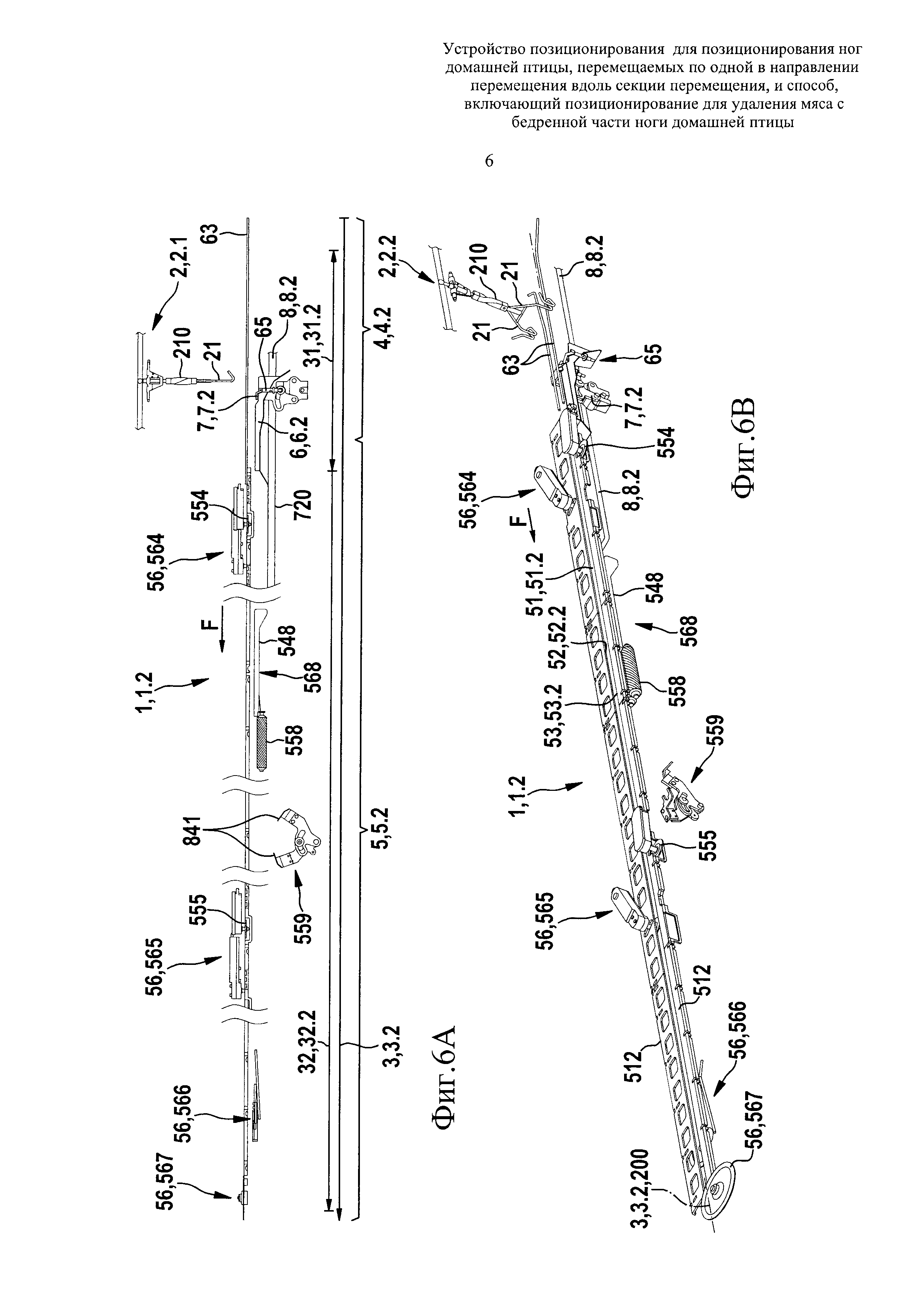
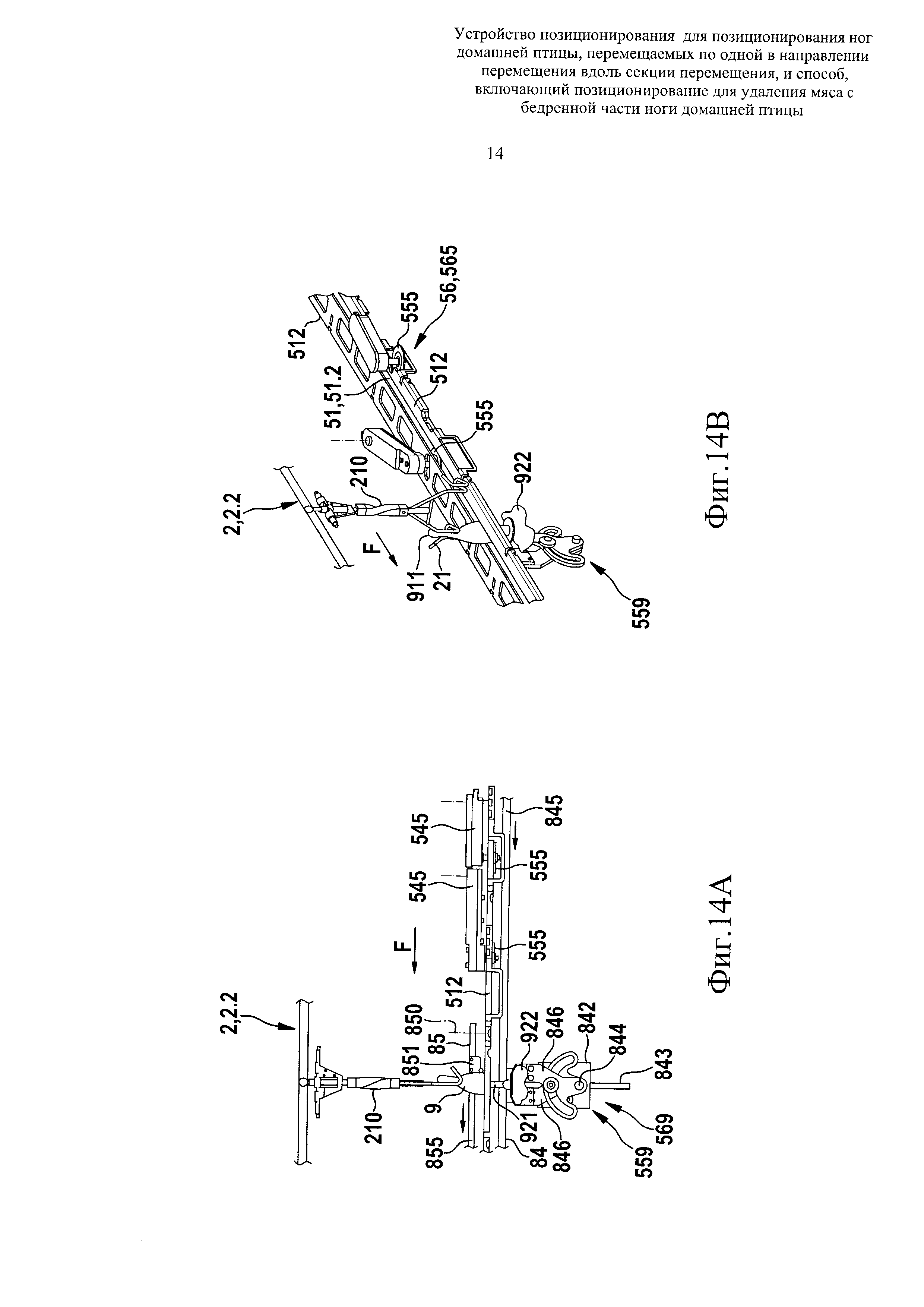
На Фиг. 1А/В (Фиг. 1) - Фиг. 5А/В (Фиг. 5) представлен вариант выполнения первого устройства 1 позиционирования согласно изобретению, которое также называют устройством 1.1 бокового позиционирования. Еще один пример позиционирующего устройства 1 позиционирования согласно изобретению, а именно второе устройство позиционирования, которое также называют устройством 1.2 осевого позиционирования, изображен на Фиг. 6А/В (Фиг. 6) - Фиг. 17А/В (Фиг. 17).
Сначала будут описаны детали и узлы двух вышеуказанных устройств 1 позиционирования, поскольку они имеют аналогичное и общее применение в устройствах 1.1 и 1.2 позиционирования и любом устройстве позиционирования согласно изобретению. Для более четкого изображения ответственных частей устройств, на чертежах не показаны каркас, рама и соединительные части, на которых установлены детали и узлы, и посредством которых детали и узлы соединены друг с другом, а также приводные двигатели или подобные элементы.
Каждое устройство 1 позиционирования имеет сгибающее устройство 4, образующее устройство заведения, а также удерживающее и направляющее устройство 5, которые расположены вдоль маршрута 3 перемещения (маршрута переноса), являющегося линейным в направлении F перемещения. Каждое устройство 1 позиционирования дополнительно выполнено с устройством 2 перемещения, которое вдоль маршрута 3 перемещения имеет наборы перемещаемых держателей 21, предназначенных для транспортирования ног 9 домашней птицы в подвешенном положении.
Как изображено на Фиг. 18, ноги 9 птицы представляют собой ноги с мясом, которые были отделены от туши птицы, при этом голень 91 и бедро 92 ног соединены друг с другом коленным суставом 93. Осевую сторону 940 ноги, на которой расположен надколенник 94, называют передней стороной 941 ноги, а другая осевая сторона 940 ноги, на которой расположена подколенная ямка 95, образует заднюю сторону 942 ноги. Ось бедренной кости 921 и ось кости 924 голени ноги 9 проходят по существу в осевой плоскости 90 ноги. Ногу 9 птицы, схематически изображенную на Фиг. 18, можно считать как левой, так и правой ногой. Ноги 9 птицы, изображенные на линии перемещения Фиг. 1 - Фиг. 17, считаются левыми ногами.
Устройство 2 перемещения представляет собой надземное или подвесное устройство перемещения, в котором на одинаковой высоте подвешены держатели 21, перемещающиеся по круговой траектории. Каждая нога 9 птицы взаимодействует головкой 911 ее голеностопного сустава с соответствующим держателем 21, например, зажимом 211 держателя. На Фиг. 1 - Фиг. 17 изображен только один держатель 21, загруженный левой ногой 9, из набора держателей, следующих один за другим в направлении F перемещения.
Каждое сгибающее устройство 4 имеет неподвижный позиционирующий элемент 6, проходящий в сгибающей секции 31 перемещения маршрута 3 перемещения, и набор позиционирующих элементов 7 совместного перемещения. Каждый позиционирующий элемент 7 перемещается в направлении F перемещения совместно с соответствующим держателем 21. На чертежах показан только один позиционирующий элемент 7, взаимосвязанный с загруженным держателем 21. Позиционирующий элемент 7 совместного перемещения вместе с неподвижным позиционирующим элементом 6 в каждом случае образует пару позиционирующих элементов.
Как схематически изображено на Фиг. 18 позициями 6'/7' и 6''/7'', каждая пара позиционирующих элементов 6, 7 выполнена с обеспечением возможности, в процессе перемещения, подъема ноги 9 птицы, перемещаемой за ее коленный сустав 93 между двумя позиционирующими элементами 6, 7 и, тем самым, ее сгиба с углом подколенной ямки, соответствующим углу 931 сгиба. Один из позиционирующих элементов 6, 7 расположен и выполнен с возможностью обеспечения взаимодействия с подколенной ямкой 95 ноги 9, тогда как другой из указанных элементов расположен и выполнен с возможностью упора в бедро 92 с передней стороны 941 ноги. На Фиг. 18 пара позиций 6'/7' относится к позиционирующему устройству 1.1, тогда как пара позиций 6''/7'' относится к позиционирующему устройству 1.2.
Позиционирующие элементы 7 совместного перемещения образованы приводными нажимными элементами, которые приводятся в действие и перемещаются посредством устройства 8 приведения в действие и управления. Данное устройство в каждом случае показано схематически и только с ответственными элементами, которые обеспечивают перемещение указанных элементов 7 совместного перемещения в направлении F перемещения, а также для сгибания в двух измерениях в направлении подъема и поперек указанного направления, в направлении осевой плоскости 90 ноги птицы. Элементы для направления/управления представляют собой, например, элементы, выполненные с пазами, кулачками, рельсами, штоками, поворотными элементами, толкателями или т.п., которые обеспечивают направление, ориентацию и позиционирование указанных элементов 7. По существу известны разнообразные варианты указанных элементов для направления/управления. В частности, привод, обеспечивающий перемещение при совместном перемещении, выполнен с использованием ведомого тяжа 80, например, цепи, перемещаемой и направляемой по кругу, на которой расположены позиционирующие элементы 7 совместного перемещения, закрепленные в ряд. Позиционирующее перемещение указанного элемента 7 может, преимущественно, быть обеспечено посредством управления синхронизацией/смещением приводного и управляющего устройства с обеспечением нарастания позиционирующего перемещения, то есть, с ускорением. На чертежах изображен лишь фрагмент участка тяжа 80, являющегося частью приводного и управляющего устройства 8, который перемещается в направлении F перемещения.
Маршрут 3 перемещения включает секцию 31 сгибания ног, входящую в состав сгибающего устройства 4. Вдоль секции 31 перемещения каждая пара позиционирующих элементов 6, 7 выполняет подъем и сгибание ноги 9 птицы до определенного, в частности, максимально согнутого положения на конце указанной секции.
После секции 31 сгибания ног следует обрабатывающая секция 32 перемещения маршрута 3 перемещения. Вдоль обрабатывающей секции 32 перемещения проходит удерживающее и направляющее устройство 5. Ответственным компонентом устройства 5 является удерживающий и направляющий зазор 51, проходящий линейно по маршруту 3 перемещения и образованный между двумя кромками 52, 53. Удерживающий и направляющий зазор 51 выполнен с обеспечением возможности приема каждой ноги 9 птицы в области коленного сустава 93 между кромками 52, 53. Другими словами, две кромки 52, 53 зазора охватывают кости коленного сустава снизу и, тем самым, формируют подобие рельсовой направляющей, в которой нога 9 подвешена за костные выступы ее коленных суставов 93 и соответствующих более толстых частей ноги, и может перемещаться толканием вдоль зазора 51, а именно при скользящем контакте мяса ноги между коленным суставом 93 и кромками 52, 53 данного зазора. Кромки 52, 53 зазора целесообразно выполнять скругленными для содействия скользящему перемещению.
Удерживающий и направляющий зазор 51 проходит в вертикальной плоскости, вдоль которой перемещаются держатели 21. Согласно вариантам выполнения, кромки 52, 53 зазора проходят на одинаковой высоте относительно осевого размера ноги 9 птицы. Кроме того, кромки зазора могут быть немного смещены относительно друг друга по высоте. В любом случае, кромки вдоль обрабатывающей секции 32 перемещения образуют стационарную направляющую, в которой коленный сустав 93 каждой ноги 9 перемещается в направлении F перемещения с заданной высотой расположения коленного сустава. Согласно вариантам выполнения, коленный сустав 93 расположен вдоль обрабатывающей секции 32 перемещения в базовом положении, соответствующем одинаковой высоте. Базовое позиционирование, однако, может быть выполнено для изменяемых положений, например, изменяемых ступенчатым образом, к примеру, для зазора, который по меньшей мере на некоторых участках имеет наклон и/или проходит криволинейным образом в вертикальной плоскости перемещения. Во всех случаях траектория является линейной в том смысле, что маршрут 31 перемещения не имеет отклонений в горизонтальных направлениях, следовательно, направляющих карусельного типа, по меньшей мере в вертикальной плоскости перемещения для по существу линии 200, проходящей в прямом направлении.
Сгибающее устройство 4 образует устройство заведения, в котором каждая нога 9 птицы принимает конкретное поднятое и согнутое положение с коленным суставом 93, точно расположенным для заведения и подвешивания ноги 9 в удерживающем и направляющем зазоре 51. В целом, видно, что ноги 9 птицы направляются посредством их подвешивания в зазоре 51 или путем переноса к указанному зазору с базовым позиционированием относительно коленного сустава 93, при котором осевая ориентация ноги 9 для ее обработки не зависит от сгибания или согнутого положения на конце сгибающей секции 31 перемещения.
Описанное выше устройство 1 позиционирования представляет собой независимый модульный узел, в котором может быть расположено множество пунктов обработки, предпочтительно напротив друг друга и со смещением относительно друг друга вдоль маршрута 3 перемещения. С примерами устройства обрабатывающих станций 56 можно ознакомиться при ссылке на позиционирующие устройства 1.1 и 1.2.
Далее, со ссылкой на Фиг. 1 - Фиг. 5 будет подробно описано устройство 1.1 бокового позиционирования. Для описания, помимо прочего, использованы номера позиций, которые относятся к частям и деталям, описанным в целом выше, но при этом имеют дополнительный уточняющий номер (десятичный разряд).
Ноги 9 птицы перемещаются поперечным образом посредством устройства 2.1 перемещения, причем в варианте выполнения показана левая нога 9, которая перемещается обращенной вперед боковой наружной стороной 950, 952.
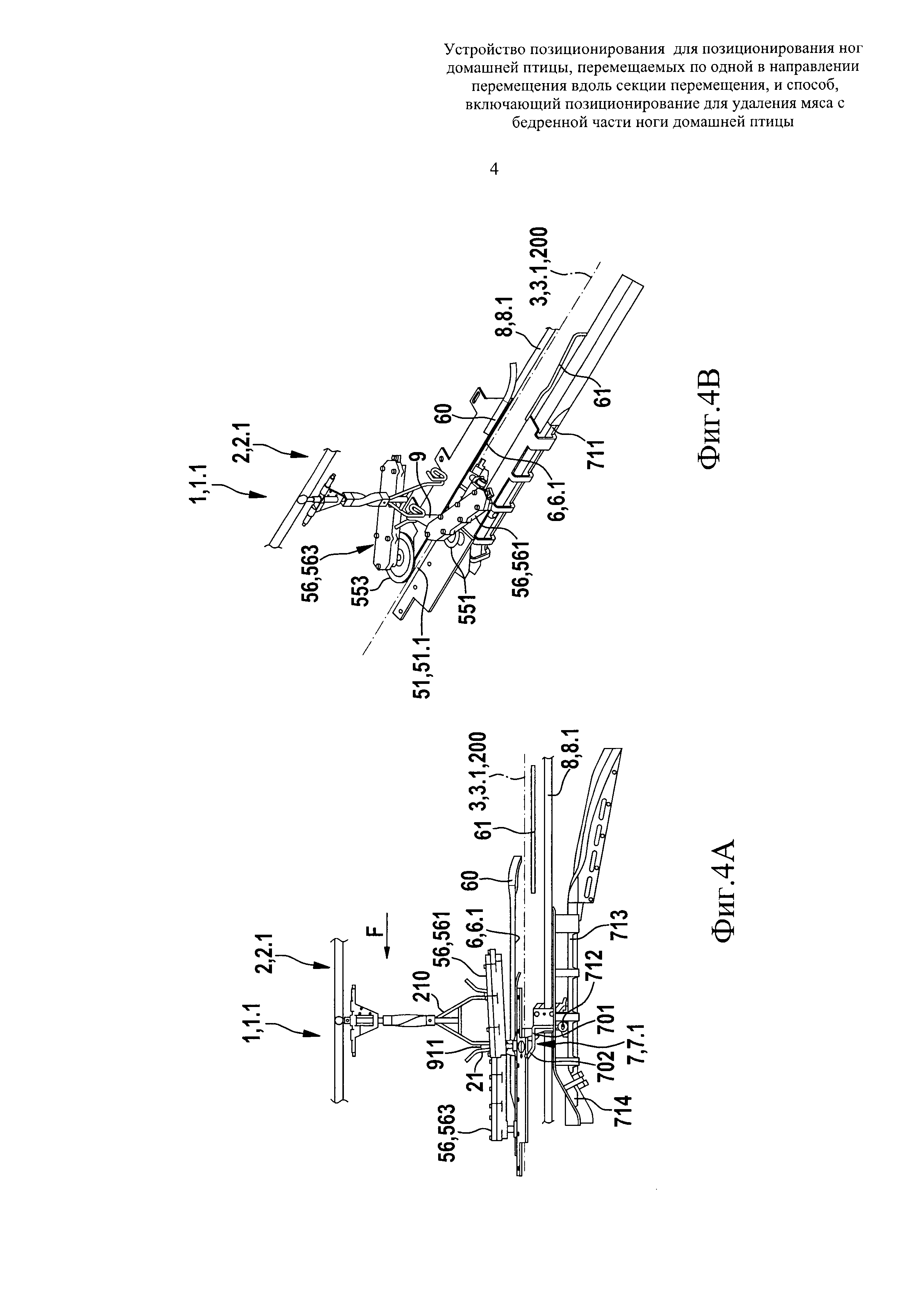
Неподвижный позиционирующий элемент 6, 6.1 образован неподвижной позиционирующей кромкой, являющейся частью непрерывной базовой удерживающей кромки, проходящей вдоль маршрута 3.1 перемещения. Номер 6.1 позиции используется далее также для обозначения позиционирующей кромки в качестве неподвижного позиционирующего элемента. Каждый позиционирующий элемент 7.1 совместного перемещения из группы позиционирующих элементов совместного перемещения выполнен с обеспечением возможности упора в бедро 92 на передней стороне 940, 941 ноги.
Сгибающее устройство 4.1 имеет неподвижную позиционирующую кромку 6,1, взаимодействующую с подколенными ямками 95 перемещаемых поперечным образом ног 9 птицы, а также ряд позиционирующих элементов 7.1 совместного перемещения, которые приводятся в действие посредством устройства 8.1 приведения в действие и управления, при этом в каждом случае составляющая перемещения лежит в осевой плоскости 90 ноги птицы, обеспечивая упор в бедро 92 на передней стороне 941 ноги.
На чертежах показаны только существенные части сгибающего устройства 4.1 вдоль сгибающей секции 31.1 перемещения, причем позиционирующий элемент 7.1 совместного перемещения, проходящий через указанную секцию, на Фиг. 1 - Фиг. 5 показан в пяти местоположениях, на которых также видна нога 9, расположенная между указанным элементом 7.1 и позиционирующей кромкой 6.1.
Позиционирующий элемент 7.1 совместного перемещения, образованный угловой деталью, имеет два рычажных участка, а именно первый рычажный участок 701 и второй рычажный участок 702, ориентированные под углом друг к другу. Угловая деталь направляется и перемещается посредством устройства 8.1 приведения в действие и управления с обеспечением по существу взаимодействия рычажного участка 701 с передней стороной 941 ноги при перемещении поперек направления F переноса. Второй рычажный участок 702 направлен и перемещается с обеспечением ориентации поперек указанного направления F и, проходя совместно в данном направлении F, с обеспечением упора в бедро 92 по существу с боковой наружной стороны 952 ноги, расположенной ниже по направлению перемещения в направлении F, обеспечивая ее опору. Управляемое смещение двухрычажного позиционирующего элемента 7.1 совместного перемещения обеспечивает перемещение элемента в осевой плоскости 90 ноги птицы, которая продвигается в направлении F перемещения, при этом суммируются две составляющие перемещения, направленные к позиционирующей кромке 6.1, а именно в направлении подъема ноги 9 и в направлении поперек ему, что обеспечивает перемещение бедра 92 ноги 9 в область, расположенную ниже указанной кромки 6.1. Кроме того, согласно варианту выполнения и в большинстве случаев, позиционирующий элемент 7.1 совместного перемещения может быть образован только элементом, соответствующим участку 701, например в виде рычага или пластины, для взаимодействия исключительно или по меньшей мере по существу с передней стороной 941 ноги.
Устройство 1.1 бокового позиционирования дополнительно имеет группу элементов 811 бокового толкания, которые перемещаются совместно с держателями 21 в направлении F перемещения и взаимосвязаны с позиционирующими элементами 7.1, образуя вместе с указанными элементами движущиеся пары, которые совместно перемещаются в указанном направлении и образуют прижимную и несущую опоры.
Толкающий элемент 811 совместного перемещения взаимодействует с боковой стороной 950, 951 ноги, которая расположена выше по направлению F перемещения, в области бедра 92 ноги. Указанные элементы 811 могут быть перемещены в направлении F перемещения при помощи средства перемещения, которое также перемещает позиционирующие элементы 7.1 в направлении перемещения и в этой связи является частью устройства 8.1 приведения в действие и управления. Однако боковые толкающие элементы 811 также могут перемещаться с помощью приводного средства, которое не зависит от устройства 8.1 приведения в действие и управления, например, приводом тягового типа, таким как управляемая, двигающаяся по кругу цепь или подобное средство, к которому прикреплены указанные элементы 811.
В варианте выполнения, изображенном на Фиг. 1 - Фиг. 5, позиционирующий элемент 7.1 совместного перемещения соединен с возможностью поворота с кареткой 81. Каретка 81, прикрепленная к ведомому тяжу 80, обеспечивает опору для бокового толкающего элемента 811. Шарнирное соединение позиционирующего элемента 7.1 выполнено вокруг оси 710, ориентированной продольным образом согласно направлению F перемещения. Поворотное перемещение позиционирующего элемента 7.1, которое обеспечивает указанное смещение, обеспечивается посредством неподвижной направляющей 711, расположенной вдоль линии 200 перемещения, и поворотного направляющего рычага 712, который проходит по указанной направляющей и соединен с позиционирующим элементом 7.1, и тоже ориентирован поперек направления F перемещения. Любой другой вариант управления перемещением может быть выполнен для обеспечения перемещения и поперечного перемещения позиционирующего элемента 7.1.
Как видно из Фиг. 1 - Фиг. 5, устройство 1.1 позиционирования или сгибающее устройство 4.1 имеет неподвижную (закрепленную) направляющую 61 начального позиционирования, проходящую на начальном участке маршрута 3.1 перемещения и взаимосвязанную с позиционирующим элементом 7.1 совместного перемещения. Направляющая 61 образована направляющим стержнем, который приводит каждую ногу 9 птицы, поступающую в устройство 1.1 позиционирования, в исходное положение относительно позиционирующей кромки 6.1, причем направляющий стержень и позиционирующая кромка 6.1 могут немного сходиться в направлении F перемещения. Направляющая 61 начального позиционирования заканчивается в области, в которой позиционирующий элемент 7.1 совместного перемещения начинает позиционирование ноги 9 птицы.
Согласно варианту выполнения, неподвижная позиционирующая кромка 6.1 образована вдоль входного участка, на котором задняя сторона 942 ноги 9 птицы первой входит в упор с неподвижным позиционирующим элементом 6.1, кромка 60 которого имеет клиновидное поперечное сечение, при этом ориентация и поперечное сечение кромки соответствуют выемке между голенью 91 и бедром 92 ноги 9 на входе в устройство 1.1 позиционирования.
В любом случае держатели 21 устройства 2.1 перемещения расположены на такой высоте относительно неподвижной позиционирующей кромки 6.1, что каждая нога 9 птицы при поступлении в сгибающее устройство 4.1 входит в упор на задней стороне 942 ноги в ее подколенной ямке 95 и, предпочтительно, немного выше указанной ямки, то есть против голени 91.
На Фиг. 1 левая нога 9 птицы изображена в положении, в котором она передается от неподвижной направляющей 61 начального позиционирования к соответствующему позиционирующему элементу 7.1 совместного перемещения. На чертеже видно, что в данном положении соответствующий совместно проходящий боковой толкающий элемент 811 тоже упирается в боковую внутреннюю сторону 951 ноги.
Изображенная на Фиг. 2 левая нога 9 птицы перемещена далее вдоль сгибающего устройства 4.1 к промежуточному положению. В этом положении нога 9 расположена в положении, в котором она поднята посредством позиционирующего элемента 7.1 совместного перемещения с обеспечением захвата позиционирующей кромкой 6.1 части голени 91 снизу и взаимодействия на расстоянии от подколенной ямки 95, при этом нога 9 приведена в согнутое положение позиционирования. Подъем ноги 9 может быть замечен по головке 911 голеностопного сустава, поднятой в держателе 21.
На Фиг. 3 показано положение ноги 9, в котором она чуть более согнута посредством позиционирующего элемента 7.1 совместного перемещения, то есть угол 931 сгиба стал меньше, причем неподвижная позиционирующая кромка 6.1 продвинута далее к подколенной ямке 95. В данном положении нога 9 птицы поступает в удерживающий и направляющий зазор 51.1 на высоте коленного сустава 93. Таким образом, нога 9 заведена в зазор 51.1 и подвешена в указанном зазоре за ее коленный сустав 93.
При прохождении ноги 9 через секцию 31.1 перемещения сгибания ног она скользит в области подколенной ямки 95 вдоль позиционирующей кромки 6.1. Позиционирующая кромка 6.1 переходит во второй участок базовой удерживающей кромки, которая образует одну кромку 52.1 удерживающего и направляющего зазора 51.1. Позиционирующая кромка 6.1 и первая кромка 52.1 зазора преимущественно выполнены как кромки скольжения направляющих пластин 511. Первая кромка 52.1 зазора и позиционирующая кромка 6.1 могут являться кромкой одной пластины. Кроме того, две кромки могут принадлежать разным направляющим участкам.
Удерживающий и направляющий зазор 51.1 удерживающего и направляющего устройства 5.1 может немного сужаться в направлении F перемещения. Однако в некоторых случаях данная сходимость настолько мала и образована таким образом, что перемещаемая боком нога 9 птицы, независимо от того, является ли она левой ногой 9 с обращенной вперед наружной боковой стороной 952, либо правой ногой 9 с обращенной вперед внутренней боковой стороной 951 (или наоборот), надежно заведена в удерживающий и направляющий зазор 51.1. Пластины 511, предназначенные для образования удерживающего и направляющего зазора 51.1, преимущественно расположены на одинаковой высоте.
В результате подвешивания ноги 9 в удерживающем и направляющем зазоре 51.1 ее коленный сустав 93 расположен в базовом положении в любой точке вдоль указанного зазора. Коленный сустав 93 перемещаемой поперечным образом ноги 9 птицы имеет костный выступ, при помощи которого обеспечивают скользящее подвешивание данной ноги в удерживающем и направляющем зазоре 51.1. Удерживающий и направляющий зазор 51.1 приведен в соответствие с указанным костным выступом, а именно таким образом, что ноги 9 разных размеров скользящим образом входят в данный зазор.
Устройство 1.1. бокового позиционирования представляет собой устройство, расположенное вдоль удерживающего и направляющего зазора 51.1 и выполненное с обрабатывающими инструментами или обрабатывающими станциями 56 в пунктах обработки или выполненное с возможностью соединения с ними. Согласно варианту выполнения, удерживающее и направляющее устройство 5.1 выполнено с двумя станциями 561 и 563 резания.
Первая станция резания представляет собой стационарную станцию 561 резания передней стороны, расположенную во входной части участка перемещения удерживающего и направляющего устройства 5.1. Станция 561 имеет режущее средство 551, которое работает выше удерживающего и направляющего зазора 51.1 и образовано, в частности, в качестве варианта выполнения, циркулярным ножом, который перемещается против упругой силы набора пружин и установлен на поворачиваемом удерживающем рычаге 54, 541. Согласно варианту выполнения, рез, глубина которого доходит до хряща, наносят посредством станции 561 на передней стороне 941 ноги 9 птицы на высоте коленного сустава 93. Данное положение резания можно увидеть на Фиг. 4.
Согласно варианту выполнения, устройство 8.1 приведения в действие и управления, работающее с позиционирующими элементами 7.1 совместного перемещения, выполнено с обеспечением возможности поддержки поднятого и согнутого положения, которое обеспечивают для заведения и подвешивания ноги 9 птицы на конце секции 31.1 сгибания ног, для выполнения реза посредством станции 561 резания на передней стороне ноги. При этом направляющий рычаг 712 удерживается посредством участка 713 направляющей 711 в повернутом внутрь положении сгибания ноги. Более того, согласно варианту выполнения, управление, выполняемое устройством 8.1 приведения в действие и управления, обеспечено таким образом, что позиционирующий элемент 7.1 после прохождения станции 561 резания направляется в сторону от удерживающего и направляющего зазора 51.1 для устранения согнутого положения, обеспечиваемого указанным элементом. Направляющий рычаг 712 поворачивается обратно и опускается посредством изогнутого участка 714. В таком случае, поднятое положение ноги 9 сохраняется в соответствии с коленным суставом 93, подвешенным в удерживающем и направляющем зазоре 51.1.
Согласно варианту выполнения, в обрабатывающей секции 32.1 перемещения удерживающего и направляющего устройства 5.1 расположена дополнительная стационарная станция резания, а именно станция 563 резания задней стороны ноги, причем указанная дополнительная станция имеет режущее средство 553, работающее выше удерживающего и направляющего зазора 51.1 и образованное циркулярным ножом. Циркулярный нож установлен на поворотном рычаге 543, так что перемещается против силы упругих пружин. Как изображено на Фиг. 5, станция 563 резания по задней стороне ноги обеспечивает рез глубиной до кости коленного сустава на задней стороне 942 ноги и на высоте коленного сустава 93. Таким образом, в результате подвешивания за ее коленный сустав, нога 9 птицы принимает базовое положение. В данном случае отсутствует согнутое положение ноги, обеспечиваемое позиционирующим элементом 7.1 совместного перемещения. Рез на высоте коленного сустава 93, выполняемый посредством станции 561 резания на передней стороне ноги, может быть использован для облегчения скольжения и направленного перемещения коленного сустава 93 в подвешенном состоянии по второй кромке 53.1 зазора.
Как схематически изображено только на Фиг. 19, согласно следующему примеру, в обрабатывающей секции 32.1 перемещения удерживающего и направляющего устройства 5.1 расположена вторая стационарная станция 562 резания передней стороны ноги, при этом указанная станция имеет режущее средство, которое работает ниже удерживающего и направляющего зазора 51.1. Данное режущее средство может обеспечивать выполнение реза глубиной до бедренной кости 921 на передней стороне 941 ноги, непосредственно под коленным суставом 93. Циркулярный нож, преимущественно, расположен на подпружиненном поворотном рычаге.
Плоскость каждого циркулярного ножа первого устройства 1.1 позиционирования лежит горизонтально или немного наклонно относительно горизонтальной ориентации, так что в каждом случае рез выполняют в заданных точках, поперек осевой ориентации ноги 9 птицы.
Держатели 21 представляют собой сдвоенные компоненты сдвоенного держателя 210, на котором в положении перемещения параллельно направлению F перемещения должны быть подвешены перемещаемая первой левая нога 9 птицы и следующая за ней правая нога. Для обработки правых ног птицы сгибающее устройство 4.1 выполнено с частями и элементами (не показано), которые соответствуют обозначенным номерами 7.1, 701, 702 и 811 позиций и, в частности, могут быть специально приспособлены для упора в правую ногу, перемещаемую обращенной вперед внутренней стороной 951. Установлено, что для позиционирующего элемента совместного перемещения будет преимущественным, если он будет иметь вид, например, рычага или пластины, и обеспечивать взаимодействие с по существу только передней стороной ноги. В таком случае позиционирующие элементы 7.1 совместного перемещения подразделены на две чередующиеся группы, для левых и правых ног.
Далее приведено более подробное описание устройства 1.2 осевого позиционирования, согласно Фиг. 6 - Фиг. 17. Для данного описания помимо прочего использованы номера позиций, которые относятся к частям и деталям, описанным в целом выше, но при этом имеют дополнительный уточняющий номер (десятичный разряд).
Ноги 9 птицы перемещаются осевым образом посредством устройства 2.2 перемещения осевой стороной 940 ноги вперед, а именно передней стороной 941. В варианте выполнения показана перемещаемая левая нога 9. Неподвижный позиционирующий элемент 6, 6.2 образован стационарной наклонной плоскостью устройства заведения, наклонная направляющая которого направлена вверх в направлении F перемещения. Номер 6.2 позиции также используют далее для обозначения стационарной наклонной плоскости, используемой в качестве неподвижного позиционирующего элемента. Каждый позиционирующий элемент 7, 7.1 совместного перемещения из группы позиционирующих элементов совместного перемещения выполнен с обеспечением возможности взаимодействия с подколенной ямкой 95 ноги 9.
Сгибающее устройство 4.2 имеет стационарную наклонную плоскость 6.2, в которую с передней стороны 941 ноги упирается бедро 92, а также ряд позиционирующих элементов 7.2 совместного перемещения, каждый из которых взаимодействует посредством устройства 8.2 приведения в действие и управления с подколенной ямкой 95 ноги 9, перемещаемой осевым образом с обращенной вперед передней стороной 941.
На Фиг. 6 - Фиг. 17 показаны только существенные части сгибающего устройства 4.2, расположенные вдоль секции 31.2 сгибания ног, причем один из позиционирующих элементов 7.2 совместного перемещения, проходящий через указанную секцию 31.2, показан в одиннадцати местоположениях, на которых также видна нога 9, расположенная между данным элементом и стационарной наклонной плоскостью 6.2.
Стационарная наклонная плоскость 6.2 разделена на шесть направляющих участков 621-626, проходящих вдоль секции 31.2 сгибания ног. Наклонная плоскость 6.2 спереди начинается сравнительно крутым участком 621, за которым следует менее крутой участок 622. Участок 622 продолжает плоский горизонтальный участок 623, за которым следует участок 624, имеющий еще более уменьшенный уклон. Участок 625, продолжающий участок 624 и выполненный горизонтальным и плоским, примерно в два раза длиннее остальных участков, а на конце наклонной плоскости 6.2 образован направленный вниз участок 626. Вариант выполнения устройства 1.2 осевого позиционирования не ограничен указанным неподвижным позиционирующим элементом (наклонной плоскостью) 6.2. Может быть обеспечен любой неподвижный позиционирующий элемент 6.2, который, как правило, образован в начале и во взаимодействии с позиционирующим элементом 7.2 совместного перемещения обеспечивает отклонение и подъем для заведения ноги.
Устройство 1.2 осевого позиционирования в некоторых случаях имеет неподвижный фиксирующий позиционирующий элемент 65, который вместе с наклонной плоскостью 6.2 обеспечивает взаимодействие с передней стороной 941 ноги. В частности, элемент 65 расположен на направленном вверх участке наклонной плоскости 6.2, например в области второго направляющего участка 622.
Согласно варианту выполнения, неподвижный фиксирующий позиционирующий элемент 65 имеет два поворотных рычага 651, 652, выполненные с возможностью поворота против действия упругой силы и образующие проход, в виде распашной двери, для перемещаемой ноги 9 птицы. Поворотные рычаги 651, 652 изначально препятствуют прохождению ноги 9, но затем поворачиваются вбок против действия упругой силы и при этом сохраняют контакт с указанной ногой с обеспечение возможности прохождения ноги 9, несмотря на противодействие, образованное в местоположении указанного элемента 65. Любой фиксирующий позиционирующий элемент, который образует временное противодействие, может быть применен.
Каждый позиционирующий элемент 7, 7.2 совместного перемещения образован элементом толкания подколенной ямки, который взаимодействует с указанной ямкой 95 ноги 9 с осевой стороны 940 ноги, расположенной перед указанным элементом в направлении F перемещения, а именно, с задней стороны 942 ноги. Кроме того, номер 7.2 позиции используют далее для обозначения элемента толкания коленной ямки, упоминаемого как позиционирующий элемент совместного перемещения.
Согласно варианту выполнения, элемент 7.2 толкания подколенной ямки представляет собой рычажный элемент, имеющий выемку, в которую входит подколенная ямка 95. Например, указанные элементы 7.2, расположенные в ряд, прикреплены к вращающемуся приводному элементу 720, к примеру, тяжу или цепи устройства 8.2 приведения в действие и управления, причем каждый из них во взаимосвязи с держателем 21 может быть ориентирован в направлении F перемещения и поперек данного направления.
Устройство 8.2 приведения в действие и управления, как правило, выполнено с обеспечением возможности перемещения элемента 7.2 для толкания подколенной ямки, когда нога 9 птицы поступает в позиционирующее устройство 1.2, из положения, расположенного ниже подколенной ямки 95 ноги, в саму подколенную ямку.
Согласно варианту выполнения, каждый элемент 7.2 толкания подколенной ямки посредством поворотного рычага 721 прикреплен к валу 722, проходящему через взаимосвязанную каретку 723, которая прикреплена к приводному элементу 720. Поворотный рычаг 721 выполнен с возможностью поворота туда и обратно между двумя ограничивающими положениями. Ограничивающие положения определены концами паза 724, образованного в поворотном рычаге 721, при этом указанный паз образован круговым участком, и с данным пазом взаимодействуют упорные болты 725, прикрепленные к каретке 723. Положения поворота рычага 725 обеспечивают посредством поворотного переключателя (не показано) вала 722, в зависимости от положения каретки 723 вдоль маршрута переноса.
Например, поворотный переключатель имеет рычаг, прикрепленный к валу 722, при этом положением поворота рычага управляет следящий элемент, который взаимодействует с направляющей, проходящей вдоль маршрута перемещения, с обеспечением поворота поворотного рычага 721 влево или вправо в зависимости от высотного положения следящего элемента. Элемент 7, 7.2 толкания подколенной ямки входит в подколенную ямку 95 при промежуточных положениях упорного болта 725 внутри паза 724. Когда положение поворотного рычага 721 принимает слишком большой наклон, элемент 7, 7.2 введен в указанную ямку 95. Степень данного смещения определяется формой или уклоном направляющей.
Как видно из Фиг. 6 - Фиг. 17, сгибающее устройство 4.2 выполнено с устройством 63 обеспечения маршрута. Устройство обеспечения маршрута образовано парой направляющих стержней, проходящих параллельно вдоль секции 31.2 сгибания ног и формирующих боковые направляющие, в которые перемещаемая нога 9 упирается боками в области более толстой части голени. Данное устройство является вспомогательной направляющей, препятствующей отклонению или повороту ноги 9 поперек направления F перемещения.
Держатели 21 устройства 2.2 перемещения выполнены на той же высоте, на которой позиционирующие элементы 7.2 совместного перемещения входят в подколенные ямки 95 ног 9 при поступлении в сгибающее устройство 4.2.
На Фиг. 7 левая нога 9 птицы изображена на входе в сгибающее устройство 4.2, при этом нога находится в положении свободного подвешивания за головку 911 ее голеностопного сустава в держателе 21. В данном положении нога 9 еще не достигла неподвижного позиционирующего элемента 6.2, и позиционирующий элемент 7.2 совместного перемещения расположен в положении, немного не доходящем до положения взаимодействия с подколенной ямкой 95, как в плане времени, так и местоположения. В данном состоянии позиционирующий элемент 7.2 находится в положении ниже подколенной ямки 95, то есть при положении поворотного рычага 721, повернутого соответственно вниз, отстающего от соответствующего держателя 21.
Изображенная на Фиг. 8 левая нога 9 птицы была перемещена далее вдоль сгибающего устройства 4.2, в промежуточное положение. В данном положении нога 9 находится в первой фазе поднятого и согнутого положения. Нога 9 показана в положении, в котором неподвижный позиционирующий элемент 6.2, неподвижный фиксирующий позиционирующий элемент 65 и позиционирующий элемент 7.2 совместного перемещения находятся в контакте с указанной ногой. Позиционирующий элемент 7.2 совместного перемещения повернут из нижнего поворотного положения в верхнее поворотное положение, в котором он взаимодействует с подколенной ямкой 95. Позиционирующий элемент 7.2 расположен перед держателем 21 или головкой 911 голеностопного сустава в направлении F перемещения. Следовательно, нога 9 принимает V-образное положение, в котором надколенник 94 или коленная чашечка 96 расположена спереди в направлении F на замкнутой стороне V-образной конфигурации. Таким образом, бедро 92 ноги 9 проходит на второй участок 622 неподвижного позиционирующего элемента 6.2. Кроме того, неподвижный фиксирующий позиционирующий элемент 65 захватывает ногу 9 при помощи двух рычагов 651, 652 указанного элемента, немного ниже положения позиционирующего элемента 7.2 совместного перемещения. Следовательно, на изображенном этапе рычаги 651, 652 образуют противоупор ниже коленного сустава 93 в области его расположения. Данный противоупор, который находится под действием упругой возвращающей силы, устраняется после прохождения указанного элемента 65.
На Фиг. 9 нога 9 изображена в положении, в котором она поднята еще выше, в максимально согнутое положение, при этом угол 931 сгиба стал еще меньше. Бедро 92 проходит по верхнему участку 625 неподвижного позиционирующего элемента 6.2, а позиционирующий элемент 7.2 совместного перемещения продвинут далее в подколенную ямку 95.
В данном положении нога 9 птицы поступает в удерживающий и направляющий зазор 51.2 на высоте коленного сустава 93. Таким образом, нога 9 заведена в указанный зазор 51.2 и подвешена в нем за ее коленный сустав 93. Нога 9 принимает упомянутое, более выраженное V-образное согнутое положение, в котором позиционирующий элемент 7.2 совместного перемещения проходит впереди держателя 21 в направлении F перемещения.
Из аксонометрических видов, представленных на Фиг. 6 - Фиг. 17, понятно, что каждый держатель 21 является частью сдвоенного держателя 210, на котором левая нога 9 подвешена на одном держателе (правый держатель в направлении F перемещения) поперек указанного направления. Другой держатель 21 предназначен для перемещения правой ноги 9 птицы. Соответственно устройство 1.2 позиционирования также включает параллельные маршруты и соответствующие средства для перемещения, позиционирования и обработки правых ног. Параллельные маршруты и элементы для правых ног птицы не показаны на Фиг. 6 - Фиг. 17. Перемещение двух ног птицы (левой/правой) боковыми сторонами осуществляется по взаимосвязанным линиям перемещения. Следовательно, указанные средства тоже переносятся, располагаясь боковым образом. На Фиг. 19 можно увидеть две параллельные линии для перемещения обеих ног птицы. В принципе, изобретение можно реализовать только с одной линией перемещения ног, как описано со ссылкой на Фиг. 1 - Фиг. 17.
На Фиг. 6, Фиг. 9 - Фиг. 17 изображено удерживающее и направляющее устройство 5.2 устройства 1.2 осевого позиционирования.
Удерживающий и направляющий зазор 51.2 имеет постоянную ширину. В частности, данный зазор подходит для подвешивания и перемещения скольжением ног 9 птицы с обращенным вперед надколенником 94. Удерживающий и направляющий зазор 51.2, преимущественно, образован между двумя пластинами 512, расположенными на одинаковой высоте.
Посредством подвешивания ноги 9 в удерживающем и направляющем зазоре 51.2 ее коленный сустав 93 всегда находится в базовом положении в любой точке вдоль указанного зазора. Коленный сустав 93 перемещаемой осевым образом ноги 9 образует костный выступ коленного сустава или утолщенную часть ноги, посредством которого обеспечивают подвешивание с возможностью скольжения указанной ноги в удерживающем и направляющем зазоре 51.2. Удерживающий и направляющий зазор 51.2 приведен в соответствие с указанным костным выступом с обеспечением возможности скольжения в нем ног 9 разного размера. Базовые удерживающие кромки зазора образованы первой кромкой 52.2 и второй кромкой 52.3.
Устройство 1.2 осевого позиционирования представляет собой устройство, которое расположено вдоль удерживающего и направляющего зазора 51.2 и выполнено с возможностью с обрабатывающими инструментами и обрабатывающими станциями 56 в пунктах обработки или с возможностью их прикрепления. Согласно варианту выполнения, удерживающее и направляющее устройство 5.2 выполнено с двумя стационарными станциями 564, 565 выполнения боковых резов, третьей стационарной станцией 566 резания и четвертой станцией 567 резания, а также станцией 569 удаления. На чертеже станция удаления отмечена номером позиции 569 только в одной точке, в которой мясо 922 бедренной части удаляют с бедренной кости 921.
Первая станция 564 выполнения боковых резов образована первой парой первых режущих средств 554 для выполнения бокового реза, расположенных со смещением вдоль маршрута 3.2 перемещения. Указанные режущие средства наносят первые боковые резы на глубину до костного хряща на обеих боковых сторонах 950 ноги 9 на высоте коленного сустава 93 ниже удерживающего и направляющего зазора 51.2. Режущие средства 554 для выполнения боковых резов образованы циркулярными ножами, каждый из которых установлен на поворотном рычаге 544 с возможностью перемещения против действия упругой силы.
Вторая станция 565 выполнения боковых резов представляет собой элемент станции 569 удаления, выполненный с возможностью обеспечения удаления мяса 922 бедренной части с бедренной кости 921 ноги 9 птицы. Вторая станция 565 имеет вторую пару вторых режущих средств 555 для выполнения бокового реза, которые расположены со смещением вдоль маршрута 3.2 перемещения и наносят вторые боковые резы на глубину до бедренной кости 921, на боковых сторонах 950 ноги 9 ниже коленного сустава 93 ниже удерживающего и направляющего зазора 51.2. Режущие средства 555 для выполнения бокового реза образованы циркулярными ножами, каждый из которых установлен на поворотном рычаге 545 с возможностью перемещения против действия упругой силы.
Станция 569 удаления имеет средства 559 для удаления мяса, перемещаемые в ряд ниже удерживающего и направляющего зазора 51.2 и предназначенные для стягивания или соскабливания мяса 922 бедренной части с бедренной кости 921 ноги 9. Каждое средство 559 перемещается совместно с соответствующим держателем 21 в направлении F перемещения. Средства 559 выполнены с возможностью обеспечения стягивания мяса 922 бедренной части по бедренной кости 921 к ее проксимальному концу, то есть к кости 923 тазобедренного сустава.
Как видно из Фиг. 9, согласно варианту выполнения, неподвижный позиционирующий элемент 6.2 и позиционирующий элемент 7.2 совместного перемещения выполнены с обеспечением полного выхода из взаимодействия элемента 6.2 с ногой 9 птицы на этапе подвешивания. На конце сгибающего устройства 4.2 неподвижный позиционирующий элемент 6.2 заканчивается наклоненным вниз участком 626, так что нога 9 освобождается от указанного элемента при входе в удерживающее и направляющее устройство 5.2.
Как изображено на Фиг. 10, позиционирующий элемент 7.2 совместного перемещения снова принимает повернутое назад положение в начале маршрута 3.2 перемещения удерживающего и направляющего устройства 5.2. Положение элемента 7.2, предшествующее держателю 21, устранено, и в результате устранения сгибания нога 9 возвращается в более или менее прямое положение, при этом коленный сустав 93 подвешен в удерживающем и направляющем зазоре 51.2. В результате, головка 911 голеностопного сустава ноги 9 поднимается вверх в держателе 21.
Согласно варианту выполнения, поворотный рычаг 721 поворачивается в промежуточное положение, при котором позиционирующий элемент 7, 7.2 совместного перемещения все еще выполняет опорную и удерживающую функцию с задней стороны 942 ноги в области бедра 92, ниже подколенной ямки 95, для перемещения в направлении F перемещения. Более того, перенос ноги 9 продолжается посредством держателя 21, части зажима 211 которого приведены в контакт с указанной ногой. В данном положении ноги 9, посредством станции 564 выполнения боковых резов делают первые боковые резы.
Устройство 8.1 приведения в действие и управления расположено и выполнено с обеспечением возможности устранения опорного/удерживающего контакта позиционирующего элемента 7, 7.2 после прохождения станции 564 выполнения боковых резов. Приводной элемент 720, направляемый по круговой траектории, отклоняется в точке 726 в поперечном направлении относительно направления F перемещения. Как изображено на Фиг. 11, позиционирующий элемент 7, 7.2 полностью выходит из взаимодействия с ногой 9 перед точкой отклонения/освобождения, путем поворота в нижнее положение. Такое изменение положения позиционирующего элемента 7, 7.2 может быть выполнено в любой заданной точке вдоль секции 32.2 перемещения.
Кроме того, как можно видеть на Фиг. 6 и Фиг. 11, в удерживающем и направляющем устройстве 5.2, предпочтительно, может быть расположена станция 568 снятия кожи. Данная станция, преимущественно, расположена на промежуточном участке транспортирования между первой и второй стационарными станциями 564, 565 выполнения боковых резов.
Станция 568 снятия кожи имеет средства 558 для снятия кожи, а именно, по сути известные специалистам, пару жестких обдирочных валков, расположенных параллельно направлению F перемещения. Между двумя обдирочными валками, каждый из которых имеет спираль для снятия кожи, образован входной зазор. Бедро 92 ноги 9 проходит вдоль пары валков и по центру указанной пары над зазором между валками и передней стороной 941 согнутой ноги. Согнутое положение обеспечено посредством горизонтальной наклонной плоскости 548. Станция 568, преимущественно, может быть выполнена с возможностью вертикального регулирования, посредством которого обдирочные валки могут быть приведены в положение снятия кожи при необходимости выполнения данной операции, а если снятие кожи не выполняют, то в нерабочее опущенное положение.
Как схематически изображено только на Фиг. 11А, на участке снятия кожи маршрута перемещения, с каждым держателем 21, преимущественно, может быть взаимосвязан опорный элемент 861 совместного перемещения. Опорные элементы 861 являются частью устройства 86 приведения в действие и управления. Каждый опорный элемент 861 совместного перемещения расположен и направляется с обеспечением контакта с голенью 91 ноги 9 спереди по ходу перемещения выше удерживающего и направляющего зазора. Опорные элементы 861 прикреплены к проходящему по кругу ведомому тяжу 862. Указанные элементы поступают на маршрут перемещения в точке 860 отклонения (Фиг. 10A).
Как изображено только на Фиг. 12А, Фиг. 13А, Фиг. 14А и Фиг. 15А, согласно варианту выполнения, средство 559 совместного перемещения для удаления мяса выполнено с обеспечением возможности, при взаимодействии с устройством 84 приведения в действие и управления, достижения бедра 92 вблизи коленного сустава 93 до нанесения вторых боковых резов. Средство 559 образовано, например, двумя тянущими и захватными пластинами 841, имеющими захватные выемки, при этом каждая из пластин прикреплена к рычагу 846. Рычаги 846 шарнирно поворачиваются по типу клещей вокруг оси 844 посредством взаимосвязанной каретки 842, которая перемещается совместно с взаимосвязанным держателем 21 при помощи ведущего средства устройства 84 приведения в действие и управления, например, цепи или подобного элемента. Кроме того, каретка 842 установлена с обеспечением возможности регулировки по вертикали на направляющем устройстве 843, например, на вертикальном стержне, прикрепленном к приводному средству 845 при помощи каретки или пластины 848. Средства 559 для удаления мяса прикреплены в ряд к приводному средству 845, которое направляется по кругу (бесконечным образом), при этом средства 559 поступают на маршрут перемещения в точке 840 отклонения (Фиг. 12А). Захватные и обдирочные пластины 841 перемещаются и управляются в отношении местоположения посредством контура управления (не показано) устройства 84 приведения в действие и управления, который обеспечивает перемещение и направление каретки 842 и рычагов 846 указанных пластин 841 в зависимости от их положения вдоль маршрута перемещения.
В первом положении регулирования две захватные и обдирочные пластины 841 открыты в форме челюстей (Фиг. 12А). Указанные пластины перемещаются на участке, расположенном до станции 565 выполнения боковых резов, на высоту коленного сустава 93 ноги, причем нога 9 проходит между двумя захватными и обдирочными пластинами 841 в области ее бедра 92 вблизи коленного сустава 93. Как показано на Фиг. 13, далее управляют двумя пластинами 841 с обеспечением приема ими закрытого положения, в котором нога 9, прежде чем достигнет второй станции 565 выполнения боковых резов, будет захвачена как челюстями двумя захватными выемками. Две захватные и обдирочные пластины 841 в закрытом положении образуют опорное и удерживающее средство совместного перемещения. Управление кареткой 842 и захватными рычагами 846 выполняют с обеспечением нанесения вторых боковых резов посредством станции 569 выполнения боковых резов в указанном сомкнутом и локальном положении.
После выполнения вторых боковых резов осуществляют операцию удаления как изображено на Фиг. 14 и Фиг. 15, при этом две захватные и обдирочные пластины 841 продолжают удерживаться закрытыми посредством приводного и управляющего устройства 84, и каретка 842 перемещается, в закрытом положении пластин, вниз посредством направляющего устройства 843, к проксимальному концу бедра 92. Регулирование выполняют таким образом, что в конце операции снятия мяса пластины 841 открываются и в точке 847 отклонения направляются от бедра 92 ноги и удаляются с маршрута перемещения (Фиг. 16А). На этапе удаления мяса 922 с бедренной части к проксимальному концу бедренной кости 921 посредством закрытых захватных и обдирочных пластин 841, средство 559 для удаления мяса образует локальную станцию 569 удаления, в которой получают мясо 922, снятое с бедренной части.
Согласно варианту выполнения, представленному на Фиг. 14А, Фиг. 15А, Фиг. 16А и Фиг. 17А, предпочтительно, может быть выполнено еще устройство 85 приведения в действие и управления, которое обеспечивает перемещение и направление опорных элементов 851 совместного перемещения после (ниже по потоку) второй станции 565 выполнения боковых резов к концу удерживающего и направляющего зазора 51.2. Каждый опорный элемент 851 совместного перемещения взаимосвязан с держателем 21 и расположен и направляется с обеспечением контакта с голенью 91 ноги 9 спереди над удерживающим и направляющим зазором 51.2. Опорные элементы 851 прикреплены в ряд к проходящему по кругу (бесконечному) направляемому приводному тяжу 855, например, цепи или т.п. Указанные элементы поступают на маршрут перемещения в точке 850 отклонения и сходят с него в точке 852 отклонения.
Как изображено на Фиг. 6, Фиг. 16 и Фиг. 17, третья стационарная станция 566 резания, имеющая режущее средство 556, взаимосвязана со станцией 569 удаления. Режущее средство 556 расположено на высоте конца бедренной кости 921, с которой было удалено мясо 922 бедренной части. Посредством данной конфигурации мясо 922 бедренной части удаляют с конца бедренной кости 921, собирают и выгружают при помощи средства 547.
Кроме того, на Фиг. 6, Фиг. 16 и Фиг. 17 показана четвертая стационарная станция 567 резания, имеющая режущее средство 557, которое расположено в конце удерживающего и направляющего зазора 51.2 и обеспечивает отделение очищенной от мяса бедренной кости 921 от голени 91, на которой осталось мясо, посредством реза, выполняемого по коленному суставу 93 с передней стороны 941 ноги. На высоте удерживающего и направляющего зазора 51.2 расположено средство 557 резания передней стороны ноги.
Согласно варианту выполнения, все режущие средства удерживающего и направляющего устройства 5.2 образованы циркулярными ножами, неподвижно установленными на подпружиненных поворотных рычагах. Поворотные рычаги соединены с каркасом, рамой или т.п. удерживающего и направляющего устройства 5.2. Плоскость каждого циркулярного ножа расположена горизонтально или слегка наклонно относительно горизонтальной ориентации с обеспечением в каждом случае выполнения реза поперек осевой ориентации ноги 9 в описанных точках. Могут быть использованы другие режущие средства для выполнения заданных резов.
На Фиг. 19 изображен вариант выполнения устройства 10 позиционирования, содержащего описанные устройство 1.1 бокового позиционирования и устройство 1.2 осевого позиционирования. Маршрут 30 перемещения устройства 10 выполнен с прямолинейной линей 200 перемещения. Устройство 1.1 бокового позиционирования расположено выше по направлению переноса в первой секции 301 перемещения вдоль маршрута 3.1 перемещения, а устройство 1.2 осевого позиционирования расположено ниже по направлению перемещения от него во второй секции 303 перемещения вдоль маршрута 3.2 перемещения. В секции 302 перемещения между двумя устройствами 1.1 и 1.2 позиционирования расположено поворотное устройство 15. Поворотное устройство 15 является частью полного устройства перемещения, которое имеет устройство 2.1 бокового перемещения и устройство 2.2 осевого перемещения. Как описано выше, устройство 2.1 бокового перемещения и устройство 2.2 осевого перемещения выполнены со сдвоенными держателями 210, каждый из которых имеет пару держателей 21, в которых за головку 911 голеностопного сустава подвешивают левые и правые ноги 9. В поворотном устройстве 15 держатели 21 поворачиваются друг за другом и выходят за пределы устройства, обеспечивающего перемещение ног 9 поперечным образом, к параллельному устройству для перемещения ног 9 осевым образом.
Далее будет описан способ согласно изобретению, в качестве примера со ссылкой на использование двух устройств 1.1 и 1.2 позиционирования. Посредством устройства 10 позиционирования, образованного двумя устройствами позиционирования, бедра 92 ног 9 птицы очищают до кости или филетируют путем заданного подъема и удерживания коленных суставов 93 указанных ног. Операции обработки, описанные применительно к устройствам 1.1 и 1.2 позиционирования, выполняют вдоль линейного маршрута 30 перемещения, при этом указанные операции целенаправленно взаимосвязаны с описанными пунктами обработки и выполняются в соответствии друг с другом.
Ноги 9 птицы перемещают через два устройства 1.1 и 1.2 позиционирования в направлении F перемещения по прямолинейной линии 200. В секции 301 перемещения устройства 1.1 позиционирования ноги 9 перемещают поперечным образом, обращенной вперед боковой стороной 950 ноги, а после поворота каждого держателя 21 вокруг вертикальной оси перемещают далее в секцию 303 перемещения устройства 1.2 позиционирования, при этом ноги перемещают обращенной вперед осевой стороной 941.
В первой секции 301 перемещения каждая нога 9, перемещаемая поперечным образом в ряд, подвешена за ее коленный сустав 93 в первом стационарном удерживающем и направляющем зазоре 51.1 и, тем самым, поднята в определенное базовое положение коленного сустава для выполнения описанных обрабатывающих операций вдоль первого обрабатывающего участка 32.1 перемещения и перемещается в направлении F перемещения, при этом коленный сустав 93 упирается со скольжением в кромки 52.1, 53.1 зазора, причем головка 911 голеностопного сустава удерживается с возможностью свободного перемещения в держателе 21, обеспечивающем удерживание ноги 9 для ее подъема.
Во второй секции 303 перемещения каждая нога 9, перемещаемая осевым образом в ряд, подвешена за ее коленный сустав 93 во втором стационарном удерживающем и направляющем зазоре 51.2 и, тем самым, поднята в определенное базовое положение коленного сустава для выполнения описанных обрабатывающих операций вдоль второго обрабатывающего участка 32.2 перемещения и перемещается в направлении F перемещения, оставаясь в базовом положении, при этом коленный сустав упирается со скольжением в кромки 52.2, 53.2 зазора, причем головка 911 голеностопного сустава удерживается с обеспечением возможности свободного перемещения в держателе 21, обеспечивающем удерживание ноги 9 для ее подъема.
Как правило, способ определяется описанными обрабатывающими операциями либо шагами способа, при этом важное значение имеет базовое позиционирование коленного сустава в первом стационарном удерживающем и направляющем зазоре 51.1 и втором стационарном удерживающем и направляющем зазоре 51.2 независимо от вида обрабатывающих средств. Как правило, для выполнения способа значение имеет только то, что каждую ногу 9 птицы сначала заводят посредством бокового перемещения (поперечным образом) в первый удерживающий и направляющий зазор 51, а затем посредством перемещения осевым образом во второй стационарный удерживающий и направляющий зазор 51. Для исполнения указанного способа заведение в удерживающие и направляющие зазоры 51 может быть выполнено любым соответствующим образом.
Особенно преимущественным и целесообразным является то, что каждую ногу 9 птицы, перемещаемую осевым образом во второй секции 303 перемещения, сгибают и поднимают в направлении F перемещения вдоль участка 31.2 сгибания ног, расположенного до стационарного удерживающего и направляющего зазора 51.2, для подвешивания ноги 9 в указанном зазоре, причем согнутое положение определяется углом 931 сгиба, соответствующим углу подколенной ямки между бедром 92 и голенью 91, при этом данный угол уменьшается в процессе подъема. Для выполнения указанных этапов способа, преимущественно выполняют действия по подъему и сгибанию, описанные со ссылкой на устройство 1.2 осевого позиционирования.
Заведение ног 9 птицы, вначале перемещаемых поперечным образом, преимущественно и предпочтительно, имеет место в секции 301 перемещения вдоль участка 31.1 сгибания ног, расположенного до стационарного удерживающего и направляющего зазора 51.1. Каждую перемещаемую поперечным образом ногу 9 птицы сгибают и поднимают поперек направления F перемещения, для подвешивания в первом стационарном удерживающем и направляющем зазоре 51.1, причем согнутое положение определяется углом 931 сгиба, соответствующим углу подколенной ямки между бедром 92 и голенью 91, при этом данный угол уменьшается в процессе подъема. Для выполнения указанных этапов способа, преимущественно выполняют действия, описанные для сгибания и подъема посредством устройства 1.1 бокового позиционирования.
В частности, по меньшей мере одну обрабатывающую операцию выполняют по меньшей мере на по существу несогнутой ноге 9 птицы, подвешенной в соответствующем удерживающем и направляющем зазоре 51.1 или 51.2. Согнутое положение, обеспечиваемое для заведения, в ряде случаев не выполняют.
Кроме того, согласно изобретению очень важно (независимо от других действий и по существу), что описанные этапы способа отделения мяса с бедра 92 ноги выполняют в описанной последовательности и в соответствии друг с другом. В данной связи важно, что первый рез, выполняемый на передней стороне ноги на глубину до хряща, сначала выполняют на передней стороне 941 ноги на высоте коленного сустава 92, а затем на высоте коленного сустава 93 наносят рез на задней стороне 942 ноги на глубину, доходящую до кости коленного сустава; и что по боковым сторонам 950 ноги 9 на высоте коленного сустава 93 выполняют пару первых боковых резов глубиной до костного хряща, а затем наносят пару вторых боковых резов глубиной до бедренной кости 921 на боковых сторонах 950 ноги под коленным суставом 93; а также то, что после выполнения резов мясо 922 с бедренной части стягивают по кости 923 тазобедренного сустава к проксимальному концу бедренной кости 921. Затем мясо 922 бедренной части, которое было стянуто по кости 923 тазобедренного сустава, предпочтительно, удаляют. Более того, нога 9 птицы, преимущественно, может быть разрезана для отделения бедра 92, с которого удалено мясо, от голени 91.
Еще более преимущественно, вторые боковые резы под коленным суставом 93 направлены к участку передней стороны 941 ноги.
После первого реза, выполненного по передней стороне, может быть выполнен второй рез на передней стороне, непосредственно под коленным суставом 93, при этом глубина реза доходит до бедренной кости, причем указанные вторые боковые резы наносят на той же высоте резания ноги 9 птицы, что и второй рез на передней стороне. Как и в варианте выполнения согласно Фиг. 1 - Фиг. 5, второй рез на передней стороне, преимущественно, не выполняют, если вторые боковые резы направлены к участку на передней стороне 941 ноги. При необходимости второй рез на передней стороне, как схематически изображено на Фиг. 19, может быть выполнен посредством второй станции 562 резания на передней стороне, при этом указанная станция расположена между станциями 561 и 563 устройства 1.1 бокового позиционирования.
Реферат
Группа изобретений относится к птицеперерабатывающей промышленности. Устройство (1) позиционирования для позиционирования ног (9) домашней птицы, перемещаемых в ряд подвешенным образом, имеет сгибающее устройство (4), предназначенное для сгибания и позиционирования ног птицы, а также стационарное удерживающее и направляющее устройство (5). Сгибающее устройство (4) образует заводящее устройство, предназначенное для подвешивания ноги (9) в области ее коленного сустава (93) в удерживающем и направляющем зазоре (51) указанного устройства (5). Позиционирующий элемент (7) совместного перемещения образован приводными нажимными элементами, которые обеспечивают захват ноги (9) снизу с ее осевой стороны (940), для сгибания и подъема ноги. Каждый позиционирующий элемент (7) образует вместе с неподвижным позиционирующим элементом (6) функциональную пару позиционирующих элементов (6, 7). Один из двух позиционирующих элементов (6, 7) взаимодействует с подколенной ямкой (95) ноги (9), тогда как второй позиционирующий элемент (6.2; 7.1) выполнен с возможностью упора в бедро (92) с передней стороны (941) ноги. Вдоль удерживающего и направляющего зазора (51) могут быть расположены станции (56) обработки. Согласно способу удаления мяса с бедренной части перемещаемых в ряд ног (9) птицы во время их перемещения, ноги направляют поперечным образом в первом устройстве (1.1) позиционирования, при этом боковая сторона (950) ноги обращена вперед, и осевым образом во втором устройстве (1.2) позиционирования, при этом вперед обращена осевая сторона (940) ноги, на которой расположен надколенник. Вдоль первого стационарного удерживающего и направляющего зазора (51.1) выполняют резы на передней стороне (941) ноги и на задней стороне (942) ноги. Вдоль второго стационарного удерживающего и направляющего зазора (51.2) выполняют резы на боковых сторонах (950) ноги, и мясо (922) бедренной части стягивают к проксимальному концу бедренной кости (921). 3 н. и 43 з.п. ф-лы, 19 ил.
Комментарии