Способ и устройство для обработки птиц на конвейере - RU2601051C1
Код документа: RU2601051C1
Чертежи

Описание
Настоящее изобретение относится к устройству для обработки птиц на конвейере, содержащему подвижный элемент зацепления с поверхностью контакта, предусмотренной для вхождения в контакт с птицей, и к способу обработки птиц на конвейере.
Такое устройство и способ, применяемые для снятия птиц, подвешенных за ножки с подвесок на конвейере, известны из документа ЕР 1922935. В этой публикации раскрыто применение стержневого элемента зацепления, качающегося между неактивным положением, удаленным от траектории конвейера, и активным положением, при котором стержень по сути параллелен траектории конвейера. Элемент зацепления изогнут таким образом, чтобы, когда удерживающая птицу подвеска перемещается на конвейере вперед, контакт между ножками птицы и элементом зацепления приводит к постепенному подталкиванию ножек вверх и наружу из подвески, до тех пор, пока она не потеряет с ними контакт.
Этот способ из предыдущего уровня техники является очень надежным благодаря своей механической простоте и нашел широкое применение, но со все большим ростом рабочих скоростей конвейеров, применяемых в убойных цехах птицефабрик, его применение оказывается ограниченным. Когда рабочая скорость конвейера становится слишком высокой, становится неприемлемым количество нарушений, при которых птица не была снята надлежащим образом, или была задета птица, висящая перед или за птицей, выбранной для снятия.
В документе US 4791704 описан еще один способ и устройство для снятия птиц, в котором ряды элементов зацепления расположены в виде карусели и смещаются наружу, увеличивая расстояние между элементами зацепления при зацеплении птиц. Это позволяет переносить птиц с одного конвейера, на котором птицы подвешены относительно далеко друг от друга, на другой, где они подвешены ближе друг к другу. Это хорошо работает на средних скоростях, но на высоких скоростях существует значительный риск нарушений, например, вследствие того, что элемент зацепления ударяет по птице, висящей рядом с той, которую требуется зацепить. Кроме того, этот способ и устройство способны выполнять обработку только всех птиц на конвейере, и не позволяют выполнять обработку только выбранных птиц.
Таким образом, целью настоящего изобретения является предоставление устройства и способа обработки птиц на конвейере, подходящих для очень высоких скоростей конвейеров. В частности, целью является предоставление устройства и способа обработки только выбранных птиц на конвейере, а конкретнее для снятия выбранных птиц с подвесок подвесного конвейера.
Это достигается посредством устройства, в котором элемент зацепления соединен с транспортером на первой оси, при этом указанный транспортер выполнен с возможностью вращения относительно неподвижной второй оси, при этом первая ось расположена на транспортере, на расстоянии от второй оси, таким образом, чтобы указанная первая ось вращалась относительно второй оси при вращении транспортера, при этом, как первая, так и вторая оси расположены перпендикулярно друг другу и на расстоянии от предусмотренной траектории конвейера, и при этом элемент зацепления заблокирован одним или несколькими ограничителями, расположенными между первой осью и поверхностью контакта, не допуская, таким образом, вращения поверхности контакта относительно второй оси.
Также цель достигается посредством способа, при котором поверхность контакта перемещают вдоль траектории, образованной движением внутрь от неактивного положения к траектории конвейера, движением обработки, по сути соответствующим траектории конвейера, и движением наружу из траектории конвейера и назад в неактивное положение, при этом указанные движения внутрь и наружу осуществляют в одинаковом направлении вращения, при этом элемент зацепления соединен с транспортером на первой оси, и указанный транспортер вращают относительно неподвижной второй оси, при этом первая ось расположена на транспортере на расстоянии от второй оси, таким образом, чтобы указанная первая ось вращалась относительно второй оси, и при этом элемент зацепления заблокирован в одной или нескольких точках между первой осью и поверхностью контакта, таким образом, не допуская вращения поверхности контакта относительно второй оси.
Вращение транспортера относительно второй оси означает, что часть элемента зацепления на первой оси осуществляет вращение относительно второй оси, тогда как соединительный элемент, образующий первую ось, вращается относительно элемента зацепления. В качестве примера, транспортер может содержать штифт, проходящий через отверстие в элементе зацепления и образующий первую ось. Вращение транспортера тогда будет приводить штифт в круговое движение относительно второй оси и, таким образом, к полному вращению в отверстии в элементе зацепления. Во вращение транспортер может приводить, например, приводной вал в виде коленвала, и основной элемент устройства может быть использован как основание для установки транспортера, элемента зацепления и/или ограничителей.
Ограничители, предотвращающие вращение элемента зацепления, могут быть просто стопорами, выполненными на основном элементе устройства с обеих сторон от элемента зацепления, предотвращая его движение в сторону за пределы определенной точки. Альтернативно или дополнительно элемент зацепления может содержать паз для обхода стопора на основном элементе.
Когда транспортер вращается в одном направлении, ближний конец элемента зацепления, на котором расположена первая ось, вынужден вращаться вместе с ним, а благодаря одному или нескольким ограничителям дальний конец с поверхностью контакта вынужден тогда вращаться в противоположном направлении. Получаемая в результате общая схема движения элемента зацепления, таким образом, имеет форму восьмерки, при этом каждый конец элемента зацепления проходит по замкнутой траектории в противоположном направлении. Следует отметить, что вращение, осуществляемое дальним концом элемента зацепления, а, следовательно, и поверхностью контакта, не обязательно является вращением по окружности, а траектория, описываемая определенной точкой на поверхности контакта, может быть, например, овальной, или иметь общую форму капли.
По сравнению с документом US 4791704 ограничение движения элемента зацепления означает, что весь элемент зацепления не вращается с транспортером. Соответственно, нет необходимости в ряде элементов зацепления, расположенных в виде карусели и, следовательно, значительно снижен риск ошибочного контакта при высоких скоростях.
Траектория вращения или обращения поверхности контакта является более предпочтительной, чем качающееся движение, известное из документа ЕР 1922935, благодаря тому, что движение, направленное внутрь и наружу траектории птиц, является непрерывным, что также позволяет сократить длительность всего движения. В связи с этим, следует отметить, что использование термина "непрерывный" подразумевает не движение с постоянной скоростью, а только то, что элемент зацепления проходит по разным траекториям, направленным внутрь и наружу траектории птиц. В качестве примера, в начале вращение, при котором элемент зацепления движется по направлению внутрь из неактивного положения в сторону траектории конвейера, может быть относительно быстрым, после чего скорость снижается во время выполнения обработки, а затем снова повышается во время направленного наружу движения для быстрого выведения элемента зацепления из траектории птиц. Это означает, что элемент зацепления может быть гораздо быстрее выведен из траектории птиц, перемещаемых на конвейере, минимизируя, таким образом, риск удара или попадания по нему птицами, отличными от птицы, подлежащей обработке.
Кроме того, при использовании устройства и способа снятия птиц с подвесок на конвейере, движение элемента зацепления предусматривает то, что его кинетическая энергия способствует высвобождению ножек из подвесок, приводя к более быстрому процессу снятия, чем неподвижным элементом зацепления согласно документу ЕР 1922935. Следует отметить, что любая ссылка на этот текст в связи со способом снятия предусматривает включение не только способов, при которых птиц снимают в буквальном смысле, а также и тех, при которых их переносят на подвески или подобные держатели другого конвейера.
Направление вращения транспортера, а следовательно, и конца элемента зацепления, на котором расположена первая ось, предпочтительно является таковым, чтобы во время движения при обработке направление движения поверхности контакта по сути совпадало бы с направлением движения конвейера. Таким образом, время контакта между ножками птицы и элементом зацепления может быть больше, чем если бы поверхность контакта вращалась в противоположном направлении, и во время обработки поверхность контакта предпочтительно перемещается со скоростью, по сути соответствующей скорости конвейера. При использовании устройства и способа снятия птиц с подвесок, это однонаправленное движение имеет дополнительное преимущество, заключающееся в том, что усилия, возникающие при ударе, когда элемент зацепления ударяется об ножки, пропорционально меньше, что снижает риск повреждений птицы.
Следует отметить, что хотя поверхность контакта проходит по изогнутой траектории, а траектория конвейера может быть линейной на участке снятия, направление движения поверхности контакта по касательной по меньшей мере в одной точке будет по сути параллельно траектории конвейера, и, следовательно, к направлению движения птиц.
В зависимости от общей конструкции устройства, расстояние между первой осью и поверхностью контакта предпочтительно находится в интервале 5-40 см, более предпочтительно 10-30 см для предполагаемой обработки кур. Для конструкции устройства для обработки птиц, значительно более мелких или более крупных, чем куры, например, таких как перепела или индейки, эти размеры могут нуждаться в регулировании.
Форма элемента зацепления будет зависеть от типа обработки и схемы движения. В одном варианте осуществления контактирующая часть элемента зацепления, включающая поверхность контакта, предпочтительно является закругленным выступом, при том, что элемент зацепления, например, имеет форму капли с первой осью на заостренном конце. Поверхность контакта может быть простой поверхностью, предусмотренной для толкания или нажима на птицу, заостренной кромкой, предусмотренной для разрезания птицы, и/или содержащей дополнительные инструменты, предусмотренные для разрезания или выполнения других операций с птицей. В другом варианте осуществления элемент зацепления имеет общую форму треугольника при рассмотрении в направлении первой оси, при этом одна сторона треугольника образует поверхность контакта, и первая ось расположена в вершине треугольника, расположенной напротив поверхности контакта.
При использовании устройства и способа снятия птиц с подвесок на конвейере, поверхность контакта входит в контакт с ножками птицы, подвешенной на подвеске конвейера, выталкивая их, таким образом, из подвески. Поверхность контакта может затем входить в контакт каждый раз с одной ножкой, предпочтительно контактируя сначала с задней ножкой по ходу конвейерной линии, а затем с передней при рассмотрении в направлении движения конвейера. С этой целью поверхность контакта может содержать две или более секций, каждая из которых предусмотрена для зацепления одной из ножек и, возможно расположенные под разными углами в плоскости, определяемой движением элемента зацепления. Также могут быть две отдельные поверхности контакта, каждая из которых предусмотрена для контакта с одной ножкой, или элемент зацепления может иметь волнистую форму, образуя ряд поверхностей контакта, расположенных смежно друг с другом, таким образом, чтобы контактировать с каждой ножкой птицы несколько раз, приводя к ее постепенному выведению из подвески.
Элементы зацепления с поверхностью контакта из двух или более секций, или имеющие две или более отдельных поверхностей контакта, также могут использоваться для других целей, например, одна секция или поверхность может быть плоской и предусмотренной для создания упора для птицы, тогда как другая поверхность может быть заостренной и предназначенной для разрезания. Также возможно предоставить устройство с двумя или более элементами зацепления, служащими для различных целей. В качестве примера, один может упираться в птицу для получения точного позиционирования, тогда как другой предусмотрен для осуществления активной обработки. Две поверхности контакта или секции поверхности контакта могут быть расположены под углом друг к другу не только в плоскости, определяемой движением элемента зацепления, как описано выше, а также и в перпендикулярной ей плоскости. В качестве примера, одна поверхность контакта может быть по сути горизонтальной и предусмотренной для зацепления обеих ножек птицы, тогда как другая поверхность контакта или секция поверхности контакта является по сути вертикальной и предусмотрена для зацепления грудки птицы для выполнения разреза вдоль грудной кости. При таком варианте осуществления даже возможно выполнить разрез и снять обработанную таким образом птицу посредством одного устройства, если движение одного или нескольких элементов зацепления должным образом скоординировано.
Следует отметить, что "поверхность контакта" следует понимать просто как часть поверхности элемента зацепления, которая на самом деле контактирует с птицей, и нет необходимости отделять ее от остальной части поверхности. Напротив, при применении устройства и способа снятия птиц с подвесок на конвейере будет особенно предпочтительно, чтобы поверхность элемента зацепления была как можно более гладкой и закругленной.
В одном варианте осуществления первая ось является по сути вертикальной, а элемент зацепления движется по сути в горизонтальной плоскости, что также дает по сути горизонтальную траекторию движения поверхности контакта элемента зацепления.
Другие схемы движения, конечно, также возможны. В качестве примера, вращение относительно наклонной оси может влиять на усилие элемента зацепления при контакте с птицей под углом. При использовании устройства и способа снятия птиц с подвесок конвейера такое зацепление под углом снизу может способствовать снятию ножек птицы с подвески.
В относительно сложном варианте осуществления элемент зацепления имеет форму восьмерки, таким образом, что один элемент зацепления может использоваться для обработки птиц на двух параллельных конвейерах, если он расположен между ними, при этом каждый конец элемента зацепления служит в качестве поверхности контакта.
Сам по себе элемент зацепления предпочтительно является относительно плоским, то есть, высота элемента зацепления при рассмотрении в направлении первой оси меньше, чем расстояние между первой осью и поверхностью контакта. Это приводит к тому, что поверхность контакта является относительно небольшой, что способствует низкому сопротивлению воздуха, а также, что вес элемента зацепления является относительно небольшим. Однако, поверхность контакта не должна быть настолько маленькой, чтобы был риск ненамеренного повреждения птиц, и элемент зацепления должен обладать достаточной прочностью и жесткостью для выдерживания встречных усилий при зацеплении птиц.
При использовании для снятия с конвейера кур, элемент зацепления, например, может быть изготовлен из листа полиэтилентерефталата (РЕТР) с толщиной приблизительно 8-12 мм, но также может быть изготовлен из отрезка трубы или алюминиевого прута. Альтернативными материалами для снятия птиц, а также для других видов обработки, являются нержавеющая сталь, другие полимеры, такие как полиоксиметилен (ПОМ), керамика и композитные материалы, при этом единственным требованием к материалу является его утвержденная в соответствующих инстанциях пригодность для применения в пищевой промышленности. При использовании для резки элемент зацепления предпочтительно является лезвием или диском из нержавеющей стали с острой и/или зубчатой кромкой.
Как было указано выше, устройство и способ согласно изобретению могут иметь преимущество при использовании, когда обработке подлежат только некоторые из птиц на конвейере. Выбор птиц для обработки может быть основан на множестве различных критериев, таких как их размер, вес, сорт или результат ветеринарной проверки.
С этой целью устройство может содержать считыватель ярлыков и центральный процессор, предусмотренный для получения сигналов от считывателя ярлыков и отправки сигналов активации приводному механизму, предусмотренному для приведения в действие транспортера. Когда птица выбрана, например, ветеринарным инспектором, обнаружившим у птицы отклонения, птицу помечают ярлыком, распознаваемым считывателем ярлыков. Ярлык может быть физическим или электронным ярлыком, такой как цветная маркировка или знак в системе управления производственным процессом, который означает, что птица, находящаяся на конкретной подвеске или держателе, подлежит обработке, и такое нанесение метки в виде ярлыка может осуществляться вручную или автоматически, в зависимости от критериев выбора и способа, применяемых для выбора. То же самое касается считывания ярлыков. Далее изобретение будет описано более подробно со ссылкой на графические материалы, где:
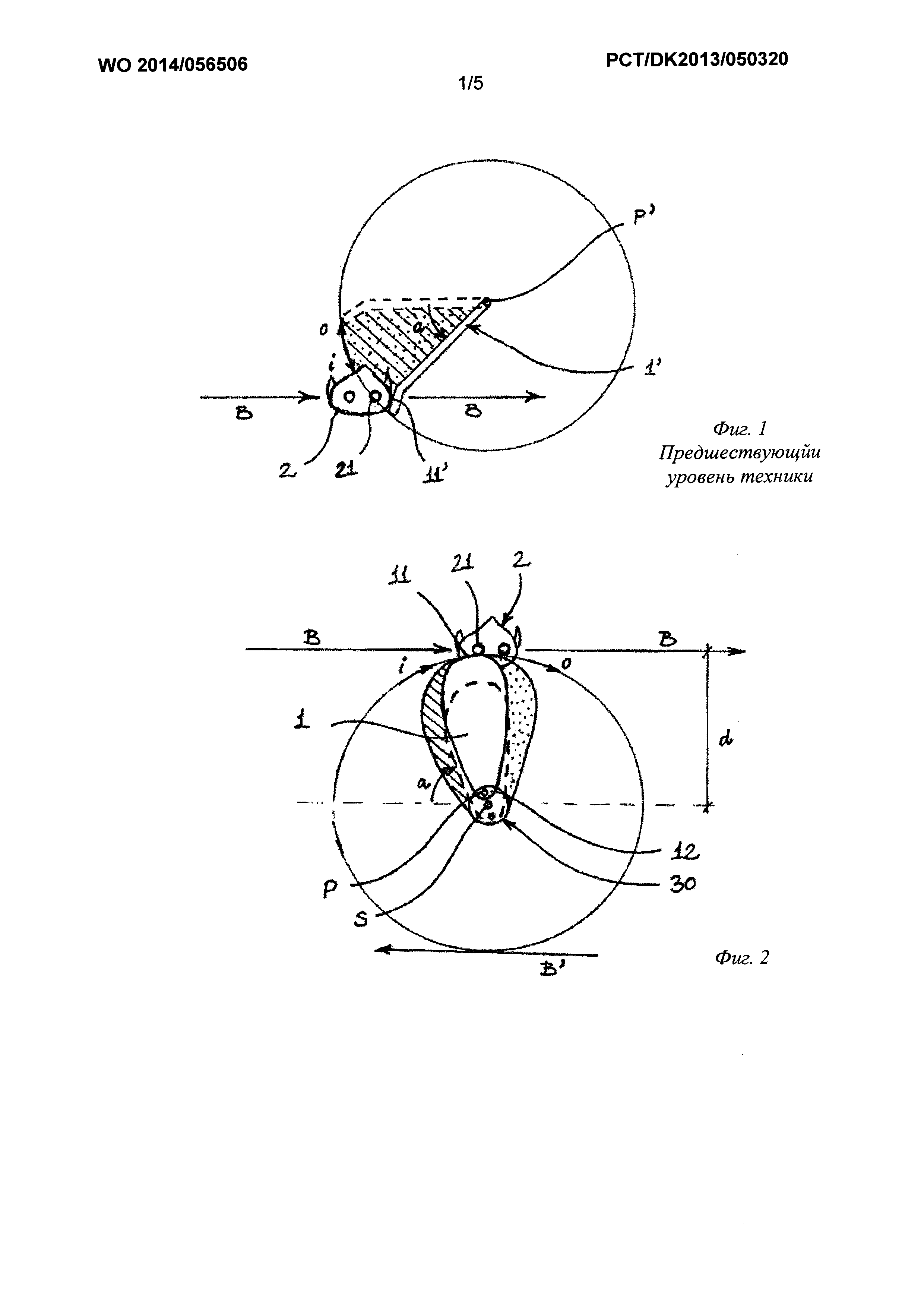
на фиг. 1 показана схема движения элемента зацепления из известного уровня техники,
На фиг. 2 показана схема движения элемента зацепления согласно настоящему изобретению,
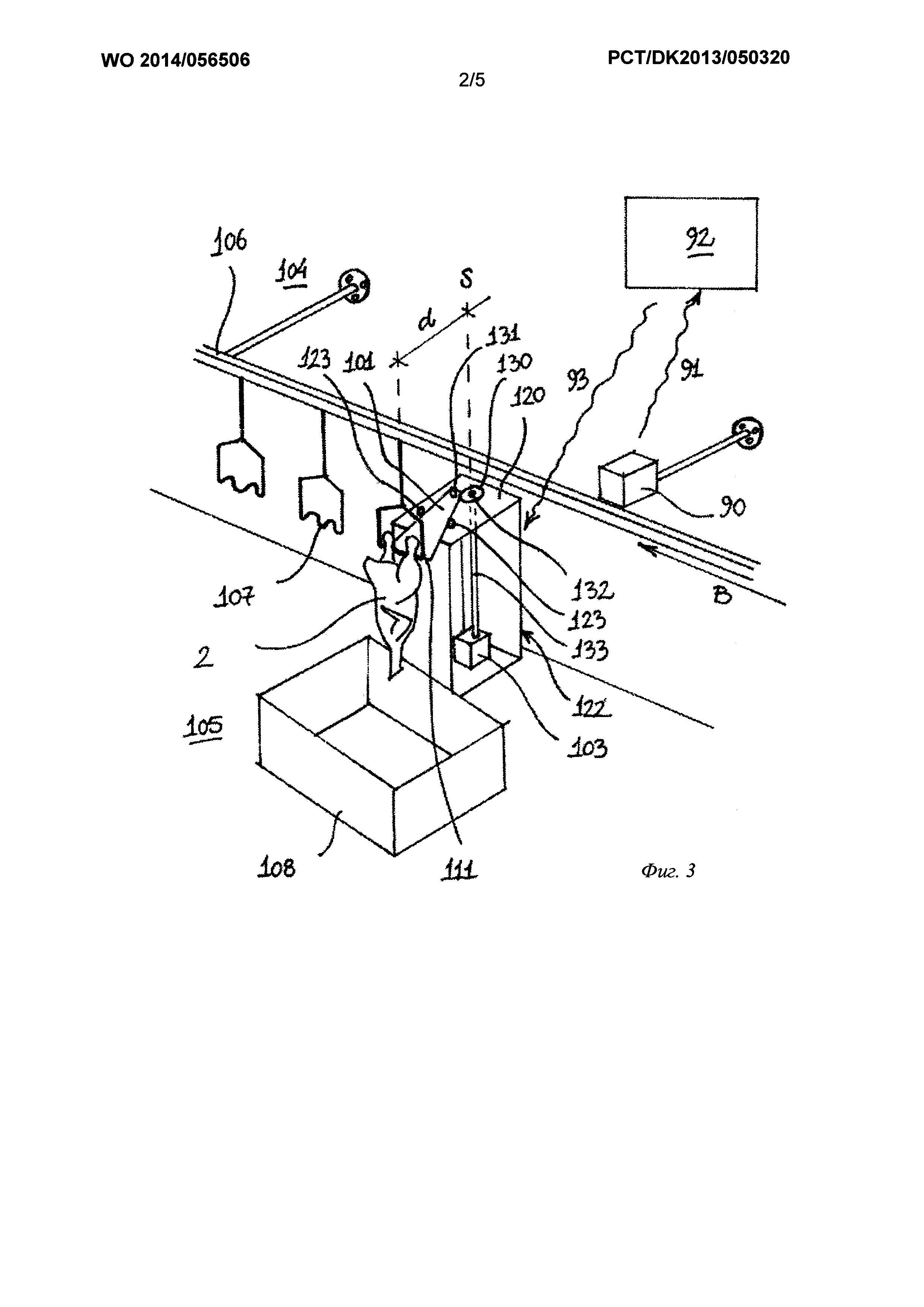
на фиг. 3 показан вид в перспективе устройства согласно изобретению с треугольным элементом зацепления,
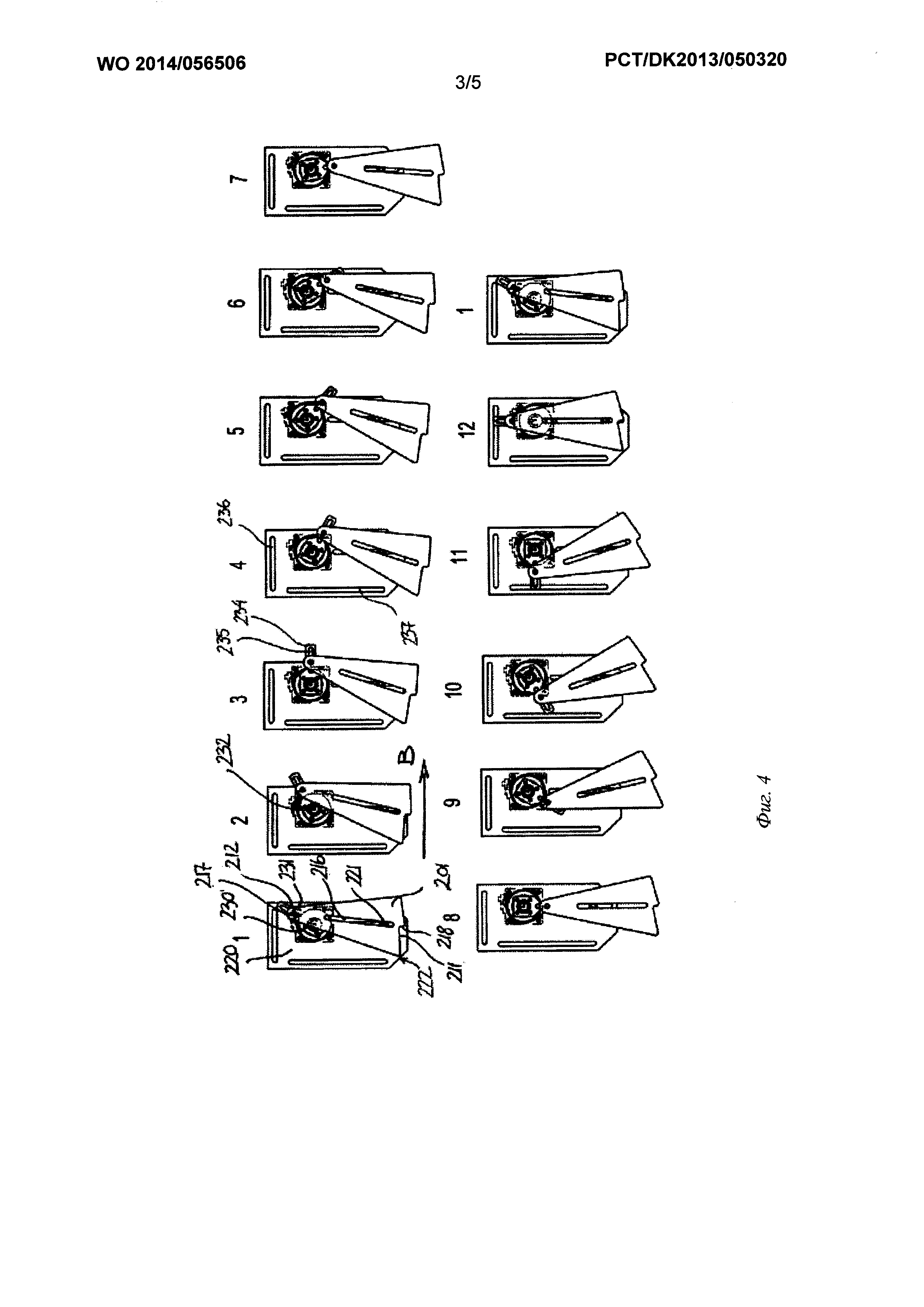
на фиг. 4 показан ряд схематических изображений, показывающих движение элемента зацепления согласно третьему варианту осуществления изобретения,
на фиг. 5 показана схема движения элемента зацепления по фиг. 4 и
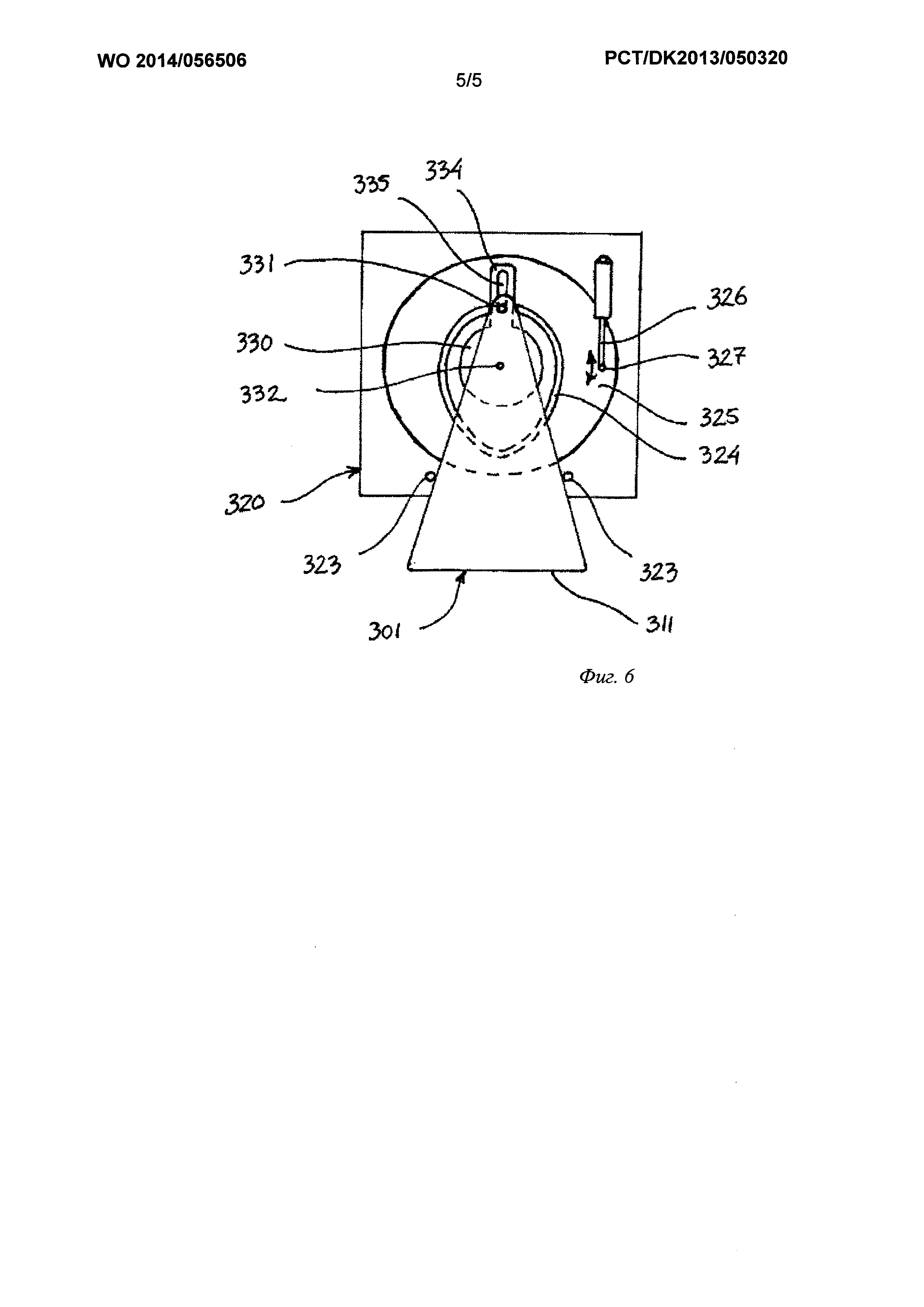
на фиг. 6 показан четвертый вариант осуществления устройства согласно изобретению.
Принцип действия способа согласно настоящему изобретению показан в сравнении с аналогом из ЕР 1922935 по фиг. 1 и 2. В обоих случаях площадь, занимаемая элементом 1,1′ зацепления во время движения для вхождения в контакт с птицей 2, показана заштрихованной, а площадь, занимаемая во время движения из траектории В птиц, показана усеянной точками.
Сегодня, теоретически, все убойные цеха работают с птицами, подвешенными за обе ножки на подвесках подвесного конвейера и, следовательно, далее изобретение будет описано со ссылкой на такие подвески и такие операции. Однако, следует понимать, что в изобретении также применяются способы, при которых птицы, например, подвешены только за одну ножку, или где они не подвешены на подвесках, а расположены на держателях иного типа, или транспортируются, покоясь на конвейере, под действием силы тяжести.
Движение элемента зацепления согласно изобретению можно рассматривать, как включающее три различных частичных движения: движение i, направленное внутрь, при котором элемент 1,1′ зацепления перемещается в сторону траектории конвейера, движение обработки, при котором он проходит по траектории В конвейера и контактирует с птицей 2, и движение о, направленное наружу, при котором он отводится из траектории конвейера.
Как можно видеть, элемент 1′ зацепления из известного уровня техники по фиг. 1 занимает по сути ту же площадь во время движения i внутрь и движения о наружу, при этом элемент 1 зацепления согласно изобретению по фиг. 2 занимает различные площади. Иными словами, в способе согласно уровню техники угол движения элемента зацепления во время движения внутрь увеличивается, а во время движения наружу - уменьшается, тогда как согласно настоящему изобретению угол движения продолжает увеличиваться при движении наружу.
Как можно видеть из фиг. 2, направление движения поверхности 11 контакта элемента 1 зацепления согласно изобретению при движении обработки по сути совпадает с направлением траектории В конвейера, и, таким образом, с направлением транспортировки птиц. Это означает, что хотя поверхность контакта может иметь изогнутую общую траекторию, по меньшей мере в одной точке она будет проходить в том же направлении, что и птица.
На фиг. 1 и 2 элементы 1,1′ зацепления показаны сплошными линиями в своих активных положениях, при которых они осуществляют зацепление птицы 2, и пунктирными линиями в своих неактивных положениях. В варианте осуществления по фиг. 2 элемент 1 зацепления имеет форму капли с закругленным дальним концом, выступающим в качестве поверхности 11 контакта, осуществляющей зацепление птиц, и заостренным ближним концом 12, соединенным с транспортером 30 на первой оси Р.
Стрелка В′ на фиг. 2 указывает также на возможность установки второго конвейера, транспортирующего птиц в противоположном направлении с противоположной стороны устройства. Указанный второй конвейер может быть отдельным конвейером, транспортирующим второй ряд птиц, а также может быть предусмотрен первый конвейер с замкнутым циклом (не показан), таким образом, проходящий через устройство с обеих сторон, потенциально увеличивая его производительность. Элемент 1 зацепления в этом случае может иметь увеличенную длину, например, имея общую форму в виде восьмерки, с одной частью, выступающей из транспортера на второй конвейер. Такая двухсторонняя работа, тем не менее, подходит только для способов, при которых обработке подлежат все птицы, каждая вторая птица или птицы, расположенные с одинаковым интервалом друг от друга. Это применимо к любым способам, а не только к снятию. Во избежание повреждений птиц и потенциальной поломки устройства поверхность 11 контакта элементов зацепления, применяемая для снятия птиц, предпочтительно является выпуклой и закругленной.
На фиг. 3 показан элемент 101 зацепления с конфигурацией, отличной от показанной на фиг. 2, но предусмотренный для совершения по сути той же траектории движения. Многие элементы данного варианта осуществления соответствуют элементам, уже описанным выше со ссылкой на фиг. 2, и следовательно, имеют одинаковые номера ссылок, но с добавленной цифрой 100. Если не указано иное, функции таких соответствующих элементов являются одинаковыми.
Подвесной конвейер 106, прикрепленный к стене 104, содержит непрерывный ряд подвесок 107, в данном случае в целях наглядности ограниченный всего тремя, из которых одна транспортирует птицу 2. Конвейер расположен на расстоянии d от транспортера 130, и, следовательно, от первой оси Р, как показано также на фиг. 2, при этом указанное расстояние по сути соответствует расстоянию между первой осью и одной или несколькими поверхностями 111 контакта элемента 101 зацепления, при этом расстояние между первой осью Р и второй осью S является относительно небольшим.
Транспортер 130 в данном случае установлен на верхней панели 120 корпуса 122, при этом указанный корпус выступает в качестве основного элемента устройства. Ограничители 123 прикреплены к верхней панели 120 с обеих сторон от элемента 101 зацепления, предотвращая движение центральной секции элемента зацепления в стороны параллельно траектории конвейера. Опоры (не показаны) могут быть предусмотрены на транспортере 130 и/или на верхней панели 120 корпуса для предоставления опоры элементу зацепления.
Для сравнения, первая ось Р′ элемента 1′ зацепления из известного уровня техники, показанного на фиг. 1, расположена очень близко к траектории В конвейера и птицам. Соответственно, риск загрязнения, износа или даже блокировки материалом от птиц соединительного элемента, определяющего первую ось, намного выше в устройства из уровня техники, чем в устройства согласно изобретению.
При эксплуатации подвески 107, транспортирующие птиц 2, перемещаются вдоль конвейера 106 в направлении В. Когда подвеска, транспортирующая птицу, которая должна быть снята, достигает предварительно установленной точки на конвейере, приводной механизм 103 активируется и вращает транспортер 130 посредством приводного вала, расположенного на опоре 133 вала. В этом варианте осуществления приводной механизм, применяемый для приведения в действие элемента 101 зацепления, расположен в корпусе 122, стоящем на полу 105 помещения убойного цеха, и провода, соединяющие его с источником питания, блок управления и т.п. спрятаны в стене и/или полу. Специалисту в данной области, однако, будет понятно, что приводной механизм и другие элементы, не связанные непосредственно с элементом зацепления, могут быть выполнены множеством других способов, не выходящих за рамки объема формулы изобретения. Например, приводной механизм может быть установлен над транспортером, при этом приводной вал и опора вала могут быть выполнены иным образом, или корпус может быть исключен. Аналогичным образом, приводной механизм может иметь отдельное крепление и/или быть подвешенным на потолке убойного цеха, и опора 133 вала потенциально может быть исключена.
Приводной механизм 103 предпочтительно является сервоприводом, пригодным для высокоскоростной работы и эксплуатации в течение длительных периодов времени с минимальным обслуживанием, но, конечно, могут использоваться и другие типы приводных механизмов.
В ходе вращения элемент 101 зацепления перемещается из неактивного положения, соответствующего положению, показанному пунктирными линиями на фиг. 2, в положение по фиг. 3, приводя, таким образом, поверхность 111 контакта в контакте ножками 21 птицы.
Сила и скорость, обеспечиваемые приводным механизмом 103, таковы, что элемент 101 зацепления выталкивает ножки 21 из подвески 107 и птица 2 затем падает в контейнер 108 или на конвейер (не показан) под конвейером 106. Точная сила и скорость при ударе птицы зависит от ряда факторов, таких как тип применяемых подвесок и размер и вес птиц, но во избежание повреждений следует отметить, что результатом должно быть выталкивание ножек, а не удар по ним. Следует понимать, что скорость элемента зацепления не должна быть постоянной на всем протяжении его движения внутрь и наружу траектории конвейера 106, и во время обработки он предпочтительно перемещается по сути с одинаковой с конвейером скоростью. Несмотря на возможные отличия, специалист в данной области легко установит рабочую комбинацию силы и скорости путем всего нескольких экспериментов после определения типа птиц, подлежащих обработке. Также будет понятно, что сила и скорость элемента зацепления могут отличаться, например, при осуществлении способа разрезания, но это тоже может быть легко установлено путем экспериментов.
На фиг. 3 приводной вал расположен по сути вертикально, а вращательное движение транспортера 130 и движение элемента 101 зацепления находятся по сути в горизонтальной плоскости. Однако, может быть предпочтительно сделать движение элемента зацепления, а возможно также и плоскость вращения транспортера, наклонными, так, чтобы элемент зацепления ударял по ножкам 21 птицы в направлении вверх. Что именно является наиболее выгодным, зависит кроме прочего от типа применяемых подвесок и от того, свободно ли они свешиваются с конвейера, или жестко закреплены на нем. Подобным образом, элемент зацепления преимущественно может проходить под углом при осуществлении разреза. В качестве примера может быть предпочтительно выдвигать элемент зацепления сверху при выполнении разреза для открытия полости птицы.
Более подробно вариант осуществления элемента 201 зацепления и его действия показан на фиг. 4 и 5. Многие элементы данного варианта осуществления соответствуют элементам, уже описанным выше со ссылкой на фиг. 2 и 3, и следовательно, имеют одинаковые номера ссылок, но с добавленной цифрой 100 и 200, соответственно. Если не указано иное, функции таких соответствующих элементов являются одинаковыми.
Как можно видеть, элемент 201 зацепления в данном случае является клиновидным и имеет общую форму треугольника при рассмотрении в направлении первой оси 231, при этом одна сторона треугольника образует поверхность 211 контакта, и первая ось расположена в вершине треугольника, расположенной напротив поверхности контакта.
В центре треугольника расположен удлиненный направляющий элемент в виде продольного паза 216, взаимодействующий с ограничителем в виде направляющего штифта 221, закрепленного на верхней части 220 корпуса 222, служащего основным элементом устройства. В работе этот направляющий паз позволяет элементу зацепления скользить относительно ограничителя.
На ближнем конце 212 напротив поверхности 211 контакта элемент зацепления соединен с транспортером 230 посредством вала 231, содержащего первую ось вращения и проходящего через отверстие 217 в элементе зацепления. Транспортер 230 установлен на основном элементе 220 устройства и может вращаться относительно второй оси 232.
Когда подвеска (не показана), транспортирующая птицу, которая должна быть снята, достигает предварительно установленной точки на конвейере (не показан), приводной механизм активируется и вращает транспортер 230 относительно второй оси 232, как описано выше со ссылкой на фиг. 4, приводя, таким образом, в движение элемент 201 зацепления, как будет более подробно описано со ссылкой на фиг. 5. Если необходим непрямой угол зацепления, как было описано выше, верхняя панель 220 может просто проходить под углом, но расположение приводного механизма, конечно, должно быть отрегулировано соответствующим образом.
Когда, как показано на фиг. 4, транспортер 230 вращается в направлении по часовой стрелке, ближний конец 212 элемента 201 зацепления вынужден следовать за валом 231 и, следовательно, также движется по круглой траектории по часовой стрелке. Однако, при ограничении элемента зацепления штифтом 221, выступающим через паз 216, дальний конец с поверхностью 211 контакта будет вынужден следовать по траектории против часовой стрелки. Положения, занимаемые первой осью и двумя наиболее удаленными от центра концами поверхности контакта в каждой из ситуаций, показанных на фиг. 4, показаны точками на фиг. 5, при этом элемент зацепления показан в начальном положении согласно схематическому изображению 1 на фиг. 4. Общая схема движения элемента зацепления, которая показана соединяющими точки линиями, таким образом, имеет форму восьмерки, при этом каждый конец элемента зацепления проходит по замкнутой траектории в противоположном направлении.
Движение элемента 201 зацепления можно рассматривать, как включающее три различных частичных движения. Начиная с начального положения на схематическом изображении 1 по фиг. 4, элемент зацепления сначала продвигается в сторону траектории конвейера движением внутрь, показанным на схематических изображениях 1-3. Затем он проходит по траектории В конвейера в течение короткого промежутка времени при движении обработки, когда элемент зацепления находится в контакте с птицей, это движение соответствует схематическим изображениям 3-9. Наконец, когда обработка птицы выполнена, элемент зацепления выводится из траектории конвейера движением наружу к начальному положению, как показано на схематических изображениях 9-12. Следует отметить, что фиг. 3 соответствует приблизительно схематическому изображению 5 по фиг. 4, кроме того, что траектория В движения по фиг. 4 является противоположной, и что в зависимости от типа обработки, направление движения элемента зацепления при движении обработки может быть противоположным направлению движения конвейера и птиц.
Как можно видеть, поверхность 211 контакта в этом варианте осуществления разделена на две секции небольшой ступенькой 218. Каждая из этих секций предусмотрена для зацепления одной ножки птицы при использовании устройства для снятия птиц с подвесок. При движении, показанном на схематических изображениях 3-7 на фиг. 4, секция справа на фиг. 4 зацепляет заднюю ножку по ходу конвейерной линии, выталкивая ее из подвески, а во время движения, показанного на схематических изображениях 6-9, левая секция зацепляет переднюю по ходу конвейерной линии ножку.
В этом варианте осуществления расстояние между первой осью, т.е. отверстием 217 в дальнем конце 212 элемента зацепления, и поверхностью 211 контакта составляет приблизительно 25 см, если устройство предусмотрено для обработки кур. Ширина поверхности контакта приблизительно равна расстоянию между подвесками на конвейере или слегка меньше него, что обычно составляет 150 мм в убойных цехах современных птицефабрик. Для предполагаемой обработки более мелких или более крупных птиц эти размеры, конечно, должны быть соответствующим образом отрегулированы.
Элементы зацепления на чертежах предпочтительно выполнены из полимера, такого как полиэтилентерефталат (РЕТР) или полиоксиметилен (РОМ), алюминия или нержавеющей стали, и при использовании для снятия птиц с подвесок они имеют выпуклым образом закругленную поверхность контакта во избежание повреждений птиц. Направляющий паз 216 и полый корпус вала 231 могут содержать прокладки для снижения трения между элементом зацепления и направляющим штифтом 221 и валом 231, соответственно, при этом указанные прокладки предпочтительно выполнены из самосмазывающего материала.
Вал 231, образующий первую ось, в данном случае выступает из удлиненного отверстия 235 в ножке 234, выступающей из основного корпуса транспортера 230. Это позволяет регулировать расстояние между первой осью и второй осью, регулируя, таким образом, схему движения элемента зацепления и, таким образом, также и поверхности 211 контакта. Вал может быть воплощен, например, в виде болта, и положение вала относительно ножки 234 транспортера может быть затем зафиксировано путем затягивания гайки на болте, прижимая, таким образом, элемент зацепления и ножку транспортера друг к другу. В основном элементе 220 также может быть предусмотрено одно или несколько удлиненных отверстий 236, 237 для придания гибкости этого соединения с другими элементами, такими как корпус.
Удлиненное отверстие 235 в транспортере не только позволяет осуществлять ручную регулировку устройства, как описано выше со ссылкой на фиг. 4 и 5. Оно также позволяет осуществлять регулировку расстояния между первой осью и второй осью, в качестве части рабочего процесса, как будет описано ниже со ссылкой на фиг. 6, на которой показан четвертый вариант осуществления изобретения. Многие элементы данного варианта осуществления соответствуют элементам, уже описанным выше со ссылкой на фиг. 2, 3 и 4-5, и, следовательно, имеют одинаковые номера ссылок, но с добавленной цифрой 100, 200 и 300, соответственно. Если не указано иное, функции таких соответствующих элементов являются одинаковыми.
Элемент 301 зацепления, приводной механизм (не показан), опора (не показана), если таковая имеется, и ограничители 323 на фиг. 6 выполнены, как показано на фиг. 3, и не будут описаны здесь более подробно, поскольку понятно, что эти элементы не зависят от элементов, описываемых ниже, и в принципе могут быть воплощены, как описано согласно ссылке на другие фигуры, или иными способами, включенными в рамки формулы изобретения.
Вал 331, соединяющий элемент 301 зацепления и транспортер 330, в данном случае выполнен для свободного помещения в удлиненное отверстие 335 в выступающей ножке 334 транспортера и для выступа снизу обратной стороны транспортера, то есть в плоскость бумаги на фиг. 6, и в направляющий паз 324, выполненный в направляющей панели 325 устройства. Когда транспортер повернут относительно второй оси 332, вал будет вынужден повторять траекторию направляющего паза и, таким образом, вынужден перемещаться вдоль длины удлиненного отверстия. С этой целью вал 331 может быть соединением болта с гайкой, как было описано выше, которые просто не затянуты, но также возможно использовать простой штифт, поскольку надо убедиться в том, что элемент зацепления остается на своем месте.
В данном случае направляющий паз 324 показан яйцевидной формы, что означает, что расстояние между первой осью 331 и второй осью 332 будет минимальным в положении показанного элемента зацепления, и будет постепенно увеличиваться до тех пор, пока транспортер не будет повернут на 180 градусов. Во время обратного движения транспортера расстояние будет уменьшаться по аналогичной схеме, но следует понимать, что направляющий паз 324 не должен быть симметричным, и что он даже может включать резкие изменения направления, приводящие к тому, что поверхность 311 контакта элемента зацепления относительно быстро смещается, как в сторону второй оси и от нее, так и в боковые стороны.
Также, как видно из фиг. 6, направляющая панель 325, в которой предусмотрен направляющий паз 324, может быть установлена с возможностью перемещения, таким образом, чтобы положение направляющего паза могло изменяться. Это может применяться для регулировки устройства для компенсации, например, различий в размерах обрабатываемых птиц, но также возможно применять такую регулировку для получения желаемой схемы движения элемента зацепления, с перемещением, таким образом, направляющей панели в количестве одного или нескольких раз во время каждого вращения транспортера.
В данном случае регулировка осуществляется исполнительным механизмом 326, соединенным с направляющей панелью 325 на ее периметре и предусмотренным для его легкого поворота, как отмечено двойной стрелкой. Однако, следует понимать, что исполнительный механизм не обязательно должен быть цилиндром с поршнем, как показано, а может быть основан, например, на зубчатом колесе, зацепляющемся с зубцами на направляющей панели, и/или то, что исполнительный механизм может быть спрятан внутри корпуса. В данном случае направляющая панель 325 установлена в кольцевое углубление в основном элементе 320, но будет понятно, что она также может быть предусмотрена для вращения на оси. Опора 133 вала по фиг. 3 может служить для этой цели, но следует отметить, что ось вращения направляющей панели, как показано на фиг. 6, не должна совпадать со второй осью, и что в такой направляющей панели может быть предусмотрено отверстие для обеспечения места для приводного механизма, применяемого для вращения транспортера.
Толщина элемента зацепления предпочтительно находится в диапазоне 5-20 мм, в зависимости, кроме прочего, от материала, вида подлежащих обработке птиц и предусмотренной рабочей скорости. При выборе материала и размеров, следует надлежащим образом оценить прочность, жесткость, вес, износ, устойчивость к чистящим агентам и вероятность повреждения птиц.
Выбор птиц для обработки может быть основан на множестве различных критериев, таких как их вес, сорт или результат ветеринарной проверки. Например, для сортировки птиц в разных весовых категориях, каждая птица будет взвешена в весовом цехе (не показан), и каждая подвеска, транспортирующая птицу, принадлежащую к предварительно определенному весовому интервалу, будет снабжена ярлыком с соответствующим указанием для снятия. Подобным образом, ветеринарный инспектор может пометить ярлыком птиц при их прохождении через контрольный цех (не показан), и/или может быть использована сортировочная машина.
Ярлык может быть физическим ярлыком, таким как цветной маркер или рычаг, повернутый в другое положение, или электронным ярлыком в системе управления производственным процессом. Прикрепление ярлыков может быть выполнено вручную или автоматически, при этом автоматическое прикрепление ярлыков, например, осуществляется посредством весов или системы контроля на визуальной основе способом, известным как таковой.
Конечно, возможно использовать два или более различных ярлыка в одном и том же процессе, например, для прикрепления ярлыков к птицам, которые были отбракованы ветеринарным инспектором, одного типа ярлыков, а к птицам, которые не достигают нужного размера - другого типа ярлыков. В процессе снятия может быть предусмотрено два или более цеха для снятия, каждый из которых предназначен для снятия птиц с определенным типом ярлыков. Подобное прикрепление ярлыков, конечно, может применяться в других процессах, например, для прикрепления ярлыков очень крупным птицам, в которых разрез должен быть более глубоким.
Продолжительность цикла процесса, т.е. положение предварительно определенной точки на конвейере, в которой активируется приводной механизм, зависит от скорости конвейера и от скорости и размера элемента зацепления, но может быть легко определена путем прогонки нескольких птиц через систему.
Способ активации приводного механизма зависит от типа применяемых ярлыков. Сегодня во многих убойных цехах подвески отслеживаются с применением электронной системы управления, и с применением к подвеске электронных ярлыков эта система управления также может использоваться для активации приводного механизма устройства. Однако, также возможно предусмотреть механический спусковой механизм, при котором отправляется сигнал активации приводному механизму, когда, например, поднятый рычаг на подвеске ударяет по переключателю или прерывает световой пучок. Подобным образом, может быть предусмотрена система на визуальной основе для выявления цветных ярлыков и отправки сигналов активации приводному механизму, или оператор может ударять по переключателю вручную, когда он видит приближающуюся к предварительно определенной точке подвеску с ярлыком. На фиг. 3 общий принцип этого вида связи продемонстрирован в виде считывателя 90 ярлыков, посылающего считанный сигнал 91 на центральный процессор 92, который в свою очередь, если считанный сигнал означает, что птицу нужно снять, отправляет сигнал 93 активации приводному механизму 103. Когда система является простой, как показано на фиг. 3, процессор 92, конечно, может быть расположен в корпусе 122 вместе с приводным механизмом, но обычно процессор является центральным компьютером, который также служит и для других целей в убойном цеху.
Кроме описания взаимодействия центрального процессора 92 и приводного механизма 103 в очень общих терминах, что и понятно, описано, что приводной механизм и/или центральный процессор запрограммирован или иным способом приспособлен для обеспечения желаемой схемы движения элемента зацепления. В качестве примера, система для снятия птиц, описанная со ссылкой на фиг. 4 и 5, будет запрограммирована или иным способом приспособлена, чтобы транспортер совершал одно полное вращение при получении им сигнала активации, и при этом остальные процессы могут требовать только частичное вращение, несколько вращений, или остановку и повторный запуск вращения в количестве одного или нескольких раз во время цикла обработки, или изменения скорости вращения во время вращения. Дополнительные сигналы управления могут быть отправлены с центрального блока управления на приводной механизм для управления такими процессами, и/или приводной механизм может содержать отдельный блок управления, предусмотренный для управления рабочим циклом после получения сигнала активации от центрального блока управления.
Управление приводным механизмом может быть основано на использовании датчиков положения на конвейере и на приводном вале, соединенном с транспортером, при этом указанные датчики положения отправляют информацию о положении конвейера и приводного вала относительно центрального блока управления. Если, например, скорость конвейера снижается, центральный блок управления может рассчитать специальный скоростной режим для транспортера и отправить новые сигналы управления приводному механизму, и наоборот, если приводной вал по какой-то причине перестал соответствовать скоростному режиму конвейера. Датчики положения, определяющие положение конвейера и сообщающие эту информацию в центральный блок управления, уже распространены в убойных системах птицефабрик.
Применение датчиков положения предусматривает разделение движения на части, при этом расстояние между подвесками на конвейере обычно поделено на 1000 или 2048 делений датчиков движения. При необходимости в движении транспортера с разными скоростями на различных участках рабочего цикла, такое разделение может быть предпочтительным для определения участков, на которых транспортер должен работать с другой скоростью.
Как будет понятно специалисту в данной области, устройство и способ согласно изобретению подходят не только для приведения элемента зацепления в контакт с ножками птицы, висящей на подвеске, а могут использоваться для приведения любого инструмента в контакт с птицей. Элемент зацепления, таким образом, может быть встроен множеством других способов, отличных от показанных на чертеже. Один пример предусматривает режущий механизм, расположенный с обратной стороны от упорного элемента зацепления и предусмотренный для выполнения вертикального разреза. При приведении упорного элемента зацепления в контакт с ножками, режущий элемент зацепления будет расположен непосредственно напротив грудки птицы и затем может быть активирован и использован для создания разреза вдоль грудной кости, отделяя, таким образом, филе грудки. В еще одном варианте осуществления встроенный подобным образом нож может применяться для вскрытия полости птицы перед ее потрошением. В еще одном варианте осуществления элемент зацепления, который может быть предусмотрен для разрезания, подталкивания и/или подтягивания, применяется для отделения тканей, например, для отделения кожи с грудки птицы. В еще одном варианте осуществления элемент зацепления транспортирует датчик или щуп, предусмотренный для измерения температуры птицы или забора образца ткани. Это может быть выполнено путем обеспечения датчика температуры или скребка, соответственно, на поверхности контакта любого из элементов зацепления, показанного на чертеже и описанного выше. Стоит отметить, что любой такой инструмент может рассматриваться как часть элемента зацепления, и что, таким образом, достаточно, чтобы инструмент входил в контакт с птицей. Соответственно, несмотря на то, что изобретение было первоначально описано со ссылкой на вышеуказанные способы снятия, будет понятно, что, если не указано иное, различные описанные элементы и операции также могут применяться в других типах процессов или в других типах устройств. Подобным образом, описанные элементы и операции могут сочетаться альтернативными способами без выхода за рамки объема формулы изобретения.
Реферат
Группа изобретений предназначена для использования в птицеперерабатывающей промышленности. Устройство для обработки птиц на конвейере согласно изобретению содержит подвижный элемент (1, 101, 201, 301) зацепления с поверхностью (11, 111, 211, 311) контакта, предусмотренной для приведения в контакт с птицей (2). Элемент зацепления соединен с транспортером (30, 130, 230, 330) на первой оси (Р), при этом указанный транспортер выполнен с возможностью вращения относительно неподвижной второй оси (132, 232, 332), при этом первая ось (Р) расположена на транспортере (30, 130, 230, 330) на расстоянии от второй оси (132, 232, 332), таким образом, что указанная первая ось вращается относительно второй оси при вращении транспортера. Элемент зацепления (1, 101, 201, 301) ограничен между первой осью и поверхностью контакта, таким образом, не допуская вращения поверхности контакта относительно второй оси. Изобретение также относится к способу обработки птиц на конвейере, при котором во время движения при обработке, направление движения поверхности контакта предпочтительно по сути совпадает с направлением конвейера. 3 н. и 17 з.п. ф-лы, 6 ил.
Формула
установлены один или несколько ограничителей, а направляющий элемент предусмотрен для скольжения относительно неподвижного ограничителя на основном элементе, при этом направляющий элемент предпочтительно является пазом в элементе зацепления.
контакт по меньшей мере с одной ножкой птицы, снимая, таким образом, птицу с конвейера.
выбора по меньшей мере одной птицы для обработки,
снабжения ярлыком каждой выбранной для обработки птицы или ее положений на конвейере,
считывания каждого ярлыка считывателем ярлыков, посылающим считанный сигнал на центральный процессор, который в свою очередь
отправляет сигнал активации приводному механизму, предусмотренному для приведения в действие транспортера участка снятия, при этом указанный транспортер соединен с элементом зацепления на первой оси, и указанный транспортер выполнен с возможностью вращения относительно неподвижной второй оси, при этом первая ось расположена на транспортере на расстоянии от второй оси, за счет чего указанная первая ось вращается относительно второй оси, и при этом элемент зацепления ограничен в одной или нескольких точках между первой осью и поверхностью контакта, предусмотренной для вхождения в контакт с птицей, с предотвращением, таким образом, вращения поверхности контакта относительно второй оси,
перемещения элемента зацепления для приведения его поверхности контакта в контакт по меньшей мере с одной ножкой выбранной птицы, при этом поверхность контакта перемещают вдоль траектории, образованной движением внутрь из неактивного положения в траекторию конвейера, движением при обработке, которое по сути совпадает с траекторией конвейера,
перемещения элемента зацепления из траектории конвейера и обратно в неактивное положение движением наружу, при этом указанные движения внутрь и наружу имеют одинаковое направление вращения.
Комментарии