Конвейерная линия и держатель для тушки домашней птицы, применяемый в этой линии - RU2639333C1
Код документа: RU2639333C1
Чертежи


Описание
Изобретение относится к конвейерной линии для тушки домашней птицы, подвешенной за ножки, причем конвейерная линия снабжена по меньшей мере одним держателем для тушки домашней птицы, содержащим каретку для перемещения тушки или ее частей вдоль транспортировочного направления конвейерной линии и установленным с по меньшей мере первым поворотным вертикальным стержнем, подвешенным к каретке и снабженным отходящим в боковом направлении рычагом для регулировки ориентации тушки или ее частей относительно каретки, установленной подвижно на конвейерной линии. Изобретение также относится к отдельному держателю, применяемому в указанной конвейерной линии.
Такие конвейерная линия и держатель известны из более ранней заявки US 2005/0037705 настоящего заявителя.
Целью изобретения является дальнейшее усовершенствование известных конвейерной линии и держателя, которое позволит измерять вес тушки птицы или ее части, подвешенной в держателе, при сохранении возможности отходящего в боковом направлении рычага, предусмотренного на поворотном стержне, перемещать тушку птицы в обход средств обработки, которые могут быть расположены на пути конвейерной линии.
Заявитель отмечает, что в WO 2011/133028 описана конвейерная линия с держателем для тушки птицы, а в ЕР-А-1440618 описан держатель для тушки, используемый в конвейерной линии, причем в обоих документах указано, что держатель имеет каретку для перемещения тушки птицы вдоль конвейерной линии и крюки для подвешивания тушки птицы за ножки и выполнен с по меньшей мере первым поворотным вертикальным стержнем, подвешенным к каретке, для поворота тушки. В обоих документах также описано взвешивающее средство, образующее часть держателя, однако в них отсутствуют указания, предложения или предположения о том, как можно обеспечить возможность взвешивания наряду с возможностью обхода тушкой средств обработки, расположенных на пути конвейерной линии. Для решения этой проблемы устройства, описанные в WO 2011/133028 и ЕР-А-1440618, нельзя сочетать с устройством, описанным в US 2005/0037705, поскольку в этих документах представлены по существу несовместимые конструкции. Кроме того, конструкции согласно WO 2011/133028 и ЕР-А-1440618 содержат большое количество компонентов и поэтому являются дорогостоящими, к тому же они не в полной мере отвечают санитарным требованиям, поскольку в них могут накапливаться грязь и жир.
Поэтому другой целью изобретения является обеспечение гигиенических условий эксплуатации путем создания соответствующей конструкции конвейерной линии и держателя.
Следующей целью изобретения является создание конвейерной линии и держателя, имеющих, по сравнению с известными, меньшее количество компонентов и меньшую стоимость.
Еще одна цель изобретения заключается в уменьшении люфта и трения между взаимодействующими частями конвейерной линии и держателя.
Цели изобретения достигаются или по меньшей мере становятся более достижимыми благодаря отличительным признакам конвейерной линии и держателя согласно одному или нескольким пунктам формулы изобретения.
Согласно первому аспекту изобретения в держателе и конвейерной линии, в которой он используется, вблизи рычага, проходящего в боковом направлении, или на нем расположена рама, которая установлена с возможностью перемещения вверх и вниз относительно первого вертикального стержня и к которой подвешен второй стержень, при этом указанная подвижность рамы обуславливает возможность перемещения второго стержня вверх и вниз при сохранении первым стержнем своего положения по высоте, а крюк или крюки для подвешивания тушки птицы расположены на нижнем конце второго стержня. В результате рама со вторым стержнем может быть поднята и может перестать быть подвешенной к первому стержню, что позволяет точно измерять вес тушки птицы, прикрепленной к крюку или крюкам на нижнем конце второго стержня.
Согласно варианту, в котором рама выполнена как вторая каретка, место, в котором второй стержень подвешен к первому стержню, точно определяется тем, что перемещение рамы вниз ниже заданного положения ограничено первым стержнем и/или отходящим в боковом направлении рычагом.
Для этого первый стержень может быть снабжен упором или упорами, ограничивающими перемещение рамы вниз ниже места, где указанный упор или упоры функционируют.
Возможны разные варианты выполнения рамы в качестве каретки, способной перемещаться вверх и вниз. Согласно одному предпочтительному варианту выполнения вторая каретка имеет расположенные спереди и сзади группы колес, причем ось задней группы колес проходит через канал в отходящем в боковом направлении рычаге на расстоянии от первого вертикального стержня, и в этом канале имеется пространство для перемещения оси вверх и вниз.
В другом варианте выполнения на расстоянии от первого стержня рычаг имеет шарнир, с которым второй стержень соединен с возможностью поворота посредством рамы, отходящей в боковом направлении от второго стержня, причем второй стержень проходит по существу в продольном направлении первого стержня, когда перемещение рамы вниз ограничено указанным упором или упорами. Такая альтернативная конструкция позволяет раме подниматься (хотя потом она поворачивается вокруг указанного шарнира) для точного измерения веса тушки птицы, прикрепленной к крюку или крюкам на нижнем конце второго стержня.
Точности измерения способствует симметричность конструкции, т.е. наличие у рамы двух ножек, отходящих от шарнира к первому поворотному стержню с противоположных сторон от рычага этого стержня. Каждая ножка рамы предпочтительно упирается в упор, когда второй стержень расположен в продольном направлении первого стержня.
Точности измерения также способствует то, что рама снабжена опорным колесом или колесами, взаимодействующими с опорными поверхностями весов, расположенных на конвейерной линии. Одно из преимуществ изобретения заключается в том, что при такой конструкции исключается значительное влияние сил трения на точность измерения веса.
Второй стержень может быть неподвижно прикреплен к раме. Однако для обеспечения точности измерений может оказаться выгодным, чтобы второй стержень был шарнирно соединен с рамой вблизи оси колеса или колес. Тогда второй стержень может всегда принимать строго вертикальную ориентацию, также когда рама в наклонном положении поднята над упором или упорами первого стержня.
Дальнейшее повышение точности измерения возможно в конструкции, в которой рама имеет колеса на противоположных сторонах, при этом колеса каждой группы колес установлены на оси, проходящей через выполненную в раме шахту или канал, имеющую выпуклые нижнюю и верхнюю поверхности. Благодаря этому для колес, расположенных на противоположных сторонах рамы, имеется пространство для перемещения на уровни, несколько отличающиеся друг от друга, чтобы соответствовать возможно разным уровням опорных поверхностей весов, расположенных на противоположных сторонах пути конвейерной линии.
Предпочтительно, чтобы вершина каждой из нижней и верхней поверхностей шахты или канала находилась в центре шахты или канала, совпадающем с продольной связанной осью второго стержня, для достижения идеальной симметрии.
Далее изобретение описано со ссылками на чертежи, изображающие вариант выполнения предлагаемого устройства, не ограничивающий изобретения, определяемого прилагаемой формулой.
На чертежах:
- Фиг. 1 изображает в изометрии держатель и часть конвейерной линии согласно первому варианту осуществления изобретения;
- Фиг. 2 изображает спереди держатель и часть конвейерной линии согласно первому варианту осуществления изобретения;
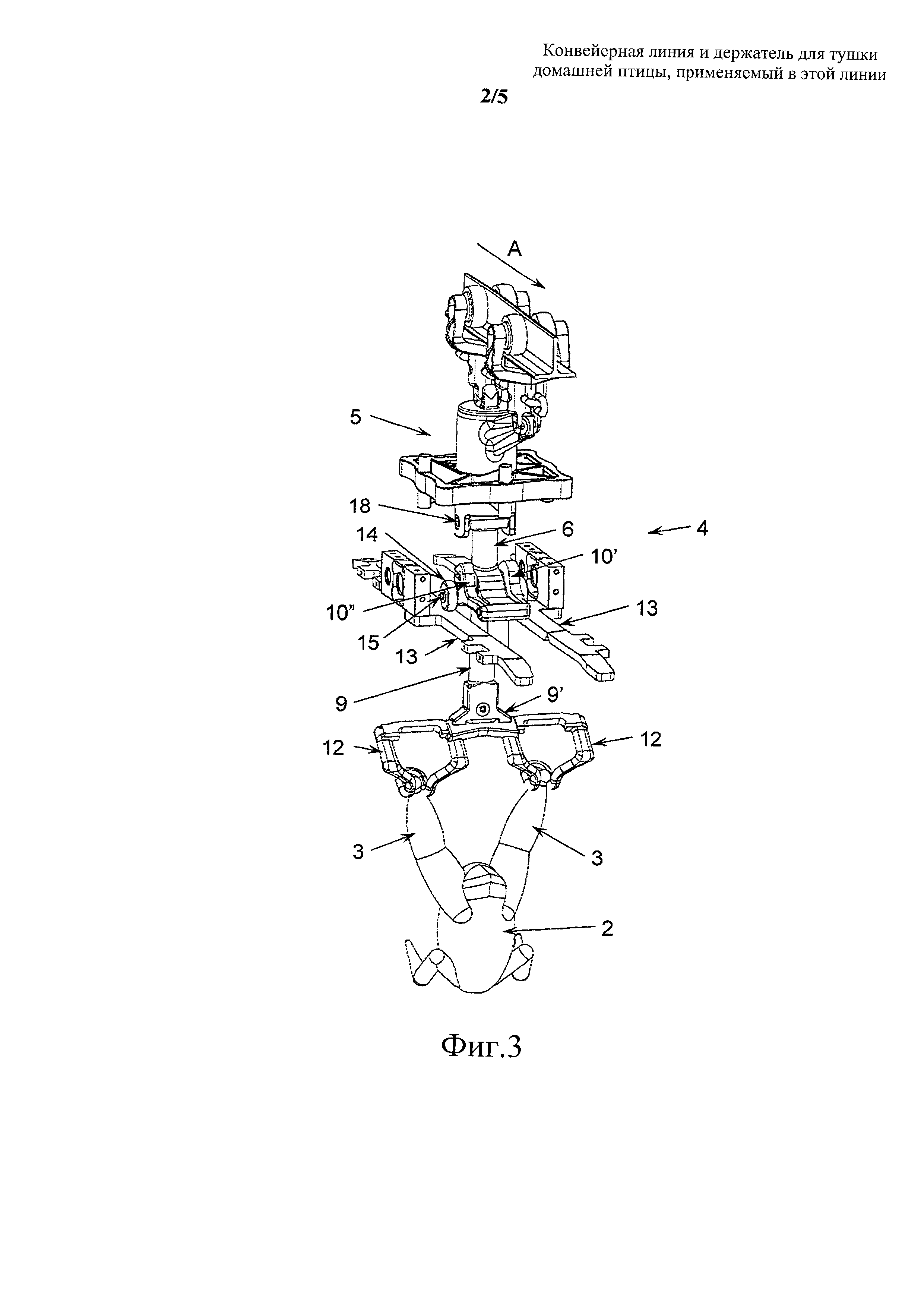
- Фиг. 3 изображает в изометрии держатель и часть конвейерной линии в месте нахождения весов конвейерной линии согласно первому варианту осуществления изобретения;
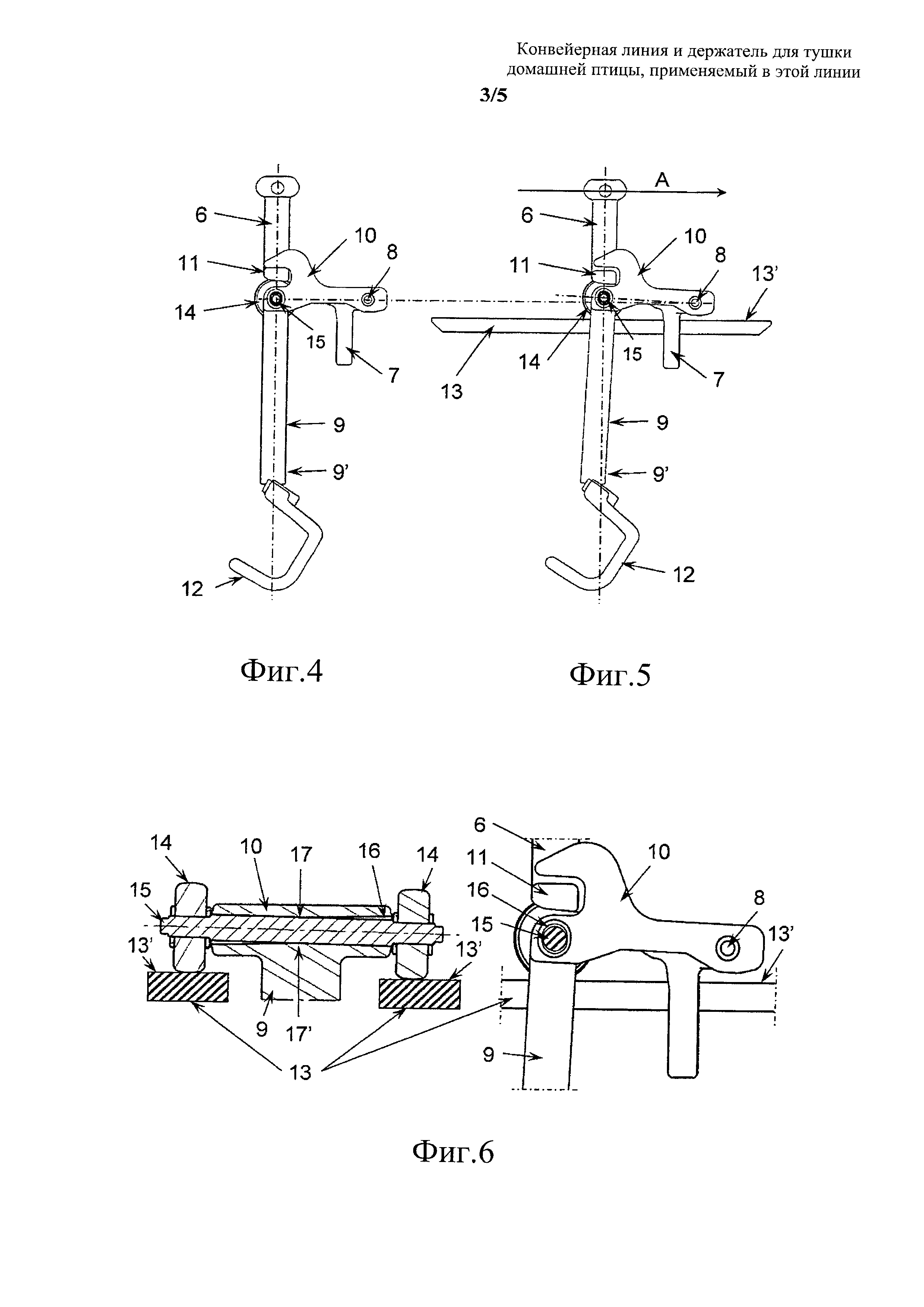
- Фиг. 4 и 5 изображают первый фрагмент держателя согласно первому варианту осуществления изобретения, в разных положениях;
- Фиг. 6 изображает разрез второго фрагмента держателя согласно изобретению, на виде сбоку и
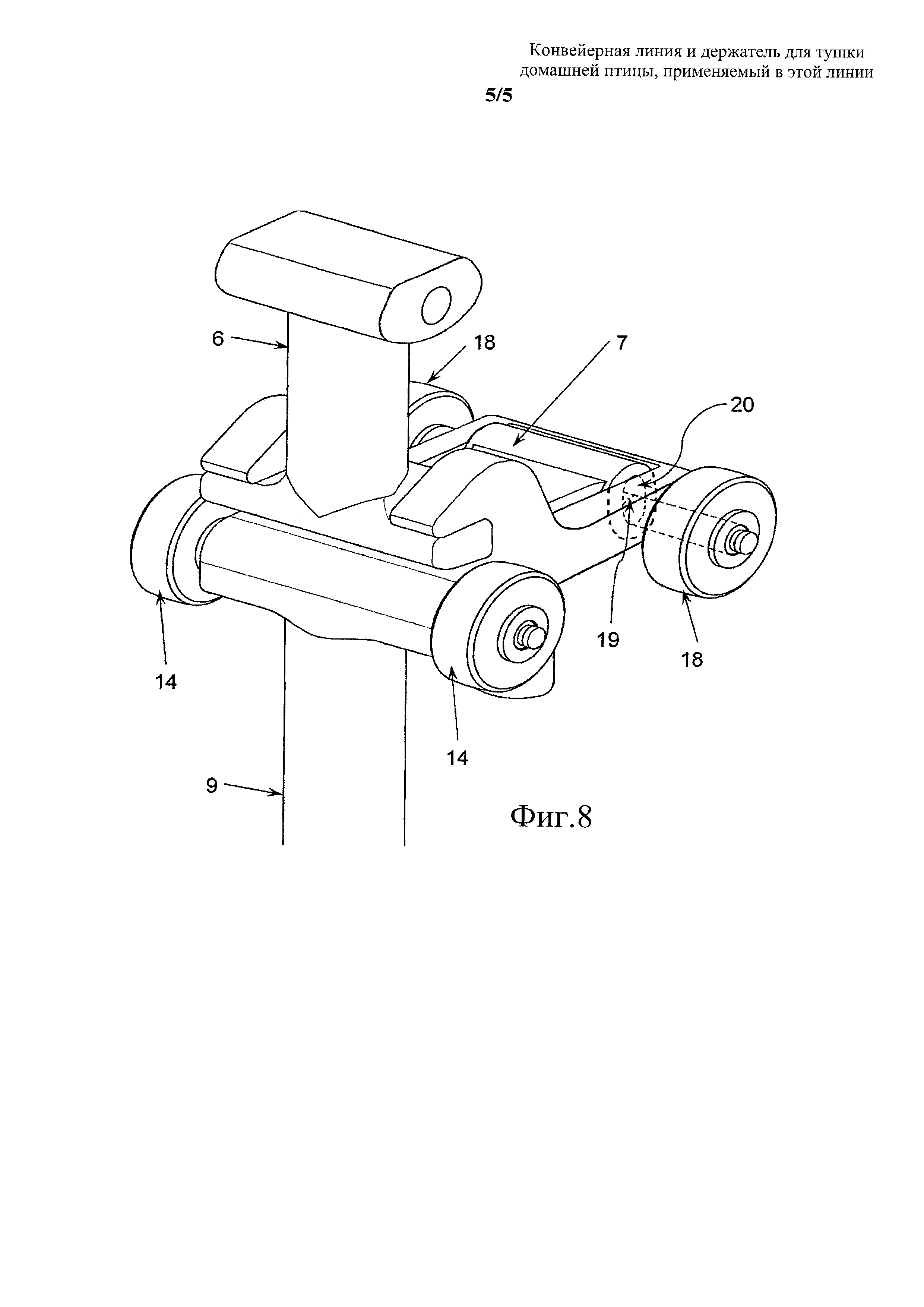
- Фиг. 7 и 8 изображают в изометрии фрагмент держателя согласно второму варианту осуществления изобретения, на виде сбоку.
На всех чертежах одинаковыми цифровыми позициями обозначены одинаковые элементы.
На фиг. 1, 2 и 3 показана конвейерная линия 1 для тушки 2 домашней птицы, подвешенной за ножки 3, содержащая по меньшей мере один держатель 4 для указанной тушки 2. Держатель 4 содержит каретку 5 для перемещения тушки 2 или ее частей в транспортировочном направлении конвейерной линии 1, как показано стрелкой А на фиг. 1 и 3. Держатель 4 установлен с поворотным вертикальным стержнем 6, подвешенным с возможностью поворота на шарнире 18 к каретке 5 и имеющим отходящий в боковом направлении рычаг 7 для регулировки ориентации тушки 2 птицы или ее частей относительно каретки 5, которая установлена с возможностью перемещения на конвейерной линии 1. Рычаг 7 может использоваться для перемещения тушки 2 в сторону от конвейерной линии 1, в обход средств обработки, расположенных на пути конвейерной линии. Все это известно из US 2005/0037705.
Согласно первому варианту осуществления изобретения, показанному на фиг. 1-5, рычаг 7 находится на расстоянии от первого стержня 6, снабженного шарниром 8, с которым с возможностью поворота соединен второй стержень 9 посредством рамы 10, отходящей в боковом направлении от второго стержня 9. Это особенно хорошо видно на фиг. 4 и 5, где также видно, что первый стержень 6 имеет упор 11 или упоры для рамы 10, препятствующие опусканию рамы 10 и соединенного с ней второго стержня 9 в положение ниже упора 11. Соответственно на фиг. 4 показано, что рама 10 опирается на упор 11 и в этом случае второй стержень 9 расположен по существу в продольном направлении первого стержня 6. На нижнем конце 9' второго стержня 9 имеется крюк или крюки 12 для подвешивания тушки 2 птицы.
На фиг. 5 видно, что в этой конструкции рама 10 может быть приподнята над упором 11 или упорами первого стержня 6, что позволяет точно измерять вес тушки 2, прикрепленной к крюку или крюкам 12 на нижнем конце 9' второго стержня 9. Как видно на фиг. 3 и 5, вес предпочтительно измеряют при помощи весов 13, расположенных на пути конвейерной линии 1 или рядом с ним. Вблизи второго стержня 9 рама 10 имеет по меньшей мере опорное колесо или колеса 14, взаимодействующие с опорными поверхностями 13' весов 13. Колеса 14 переносят груз от тушки 2 птицы, подвешенной ножками 3 в крюках 12 держателя 4, непосредственно на верхнюю поверхность 13' весов 13.
Дальнейшее увеличение точности измерения веса может достигаться другими признаками, которые описаны ниже.
Согласно одному предпочтительному варианту симметричному распределению груза способствует выполнение рамы 10 с двумя ножками 10' и 10'', отходящими от шарнира 8 к первому поворотному стержню 6 с противоположных сторон рычага 7, отходящего от первого поворотного стержня 6 в боковом направлении. Это хорошо видно на фиг. 1 и 3. В этом случае также целесообразно, чтобы каждая ножка 10' и 10'' рамы 10 упиралась в упор 11, когда второй стержень 9 расположен в продольном направлении первого стержня 6.
Согласно другому аспекту, который можно использовать в сочетании с только что упомянутым признаком, второй стержень 9 шарнирно соединен с рамой 10 в месте расположения оси 15 колеса или колес 14. Это не показано на фиг. 4 и 5, изображающих вариант выполнения, в котором между вторым стержнем 9 и рамой 10 предусмотрено неподвижное соединение, обеспечивающее возможность небольшого углового смещения стержня 9, когда рама 10 поднимается над упорами 11, выполненными на первом стержне 6. Преимущество шарнирного соединения второго стержня 9 с рамой 10 в месте расположения оси 15 колеса или колес 14 заключается в том, что в этом случае второй стержень 9 может всегда принимать точную вертикальную ориентацию, когда рама 10 приподнята над упорами 11 первого стержня 6.
В другом варианте выполнения, изображенном на фиг. 7 и 8, в котором обеспечивается очень точное измерение веса тушки 2 птицы, подвешенной ножками в крюках 12 внизу второго стержня 9, отсутствует показанный на фиг. 1-5 шарнир 8 на дальнем конце первого вертикального стержня 6. Вместо этого на фиг. 7 и 8 представлено альтернативное решение, в котором рама 10 выполнена как вторая каретка, а первый стержень 6 и/или отходящий в боковом направлении рычаг 7 ограничивают перемещение всей рамы 10 вниз ниже заданного положения. Кроме того, в этом варианте первый стержень 6 может быть снабжен упором 11 или упорами, ограничивающими перемещение рамы/каретки 10 вниз ниже места, где функционирует упор 11 или упоры.
В этом втором варианте выполнения рама 10 или каретка имеет спереди и сзади группы колес. Ось 19 задней группы 18 колес проходит через канал 20 отходящего в боковом направлении рычага 7 на расстоянии от первого вертикального стержня 6, причем в канале 20 имеется пространство для перемещения оси 19 вверх и вниз.
Точное измерение достигается в первом варианте выполнения, представленном на фиг. 1-5, и во втором варианте выполнения, представленном на фиг. 7 и 8, благодаря их общим признакам, а именно благодаря тому, что вблизи отходящего в боковом направлении рычага 7 или на нем рама 10 может перемещаться вверх и вниз относительно первого вертикального стержня 6, причем к раме 10 подвешен второй стержень 9, а подвижность рамы 10 обуславливает возможность перемещения второго стержня 9 вверх и вниз при неизменной высоте расположения первого стержня 6. Разумеется, что в обоих вариантах на нижнем конце 9' второго стержня 9 имеется крюк или крюки 12 для подвешивания тушки 2 птицы.
Для всех вариантов выполнения предпочтительно, чтобы на противоположных сторонах рамы 10 и предпочтительно вблизи второго стержня 9 имелись колеса 14, установленные на оси 15, проходящей через шахту или канал 16 в раме 10. Выгодно, если шахта или канал 16 имеет выпуклую нижнюю и верхнюю поверхности и каждая из этих поверхностей предпочтительно имеет вершину 17, 17' соответственно в центре шахты или канала 16, совпадающем с продольной связанной осью второго стержня 9. Благодаря этому колеса 14 на противоположных сторонах рамы 10 имеют пространство для перемещения на уровни, немного отличающиеся друг от друга, чтобы соответствовать возможно разным уровням опорных поверхностей 13' весов 13, расположенных на противоположных сторонах конвейерной линии, что дополнительно повышает точность измерения веса. Это также применимо к осям и колесам, установленным спереди и сзади рамы/каретки 10, как видно на фиг. 7 и 8, хотя на фиг. 6, относящейся к первому варианту согласно фиг. 1-5, это не показано.
Описанный выше вариант выполнения держателя и конвейерной ленты приведен в качестве примера осуществления изобретения и не ограничивает его объем, так что в этом варианте выполнения допустимы различные изменения в рамках объема изобретения. Поэтому описанный вариант выполнения нельзя использовать для толкования формулы в строгом соответствии с ним и он служит только для пояснения содержащихся в формуле признаков. Объем правовой охраны изобретения определяется только его формулой, и если какие-либо признаки в формуле изложены неясно, их можно уточнить, используя описанный пример осуществления изобретения.
Реферат
Изобретения относятся к пищевой промышленности, а именно к конвейерной линии и держателю, содержащему крюк или крюки для подвешивания тушки домашней птицы или ее частей за ножки и каретку для перемещения держателя вместе с подвешенной тушкой или ее частями вдоль конвейерной линии. Держатель установлен с по меньшей мере первым поворотным вертикальным стержнем, подвешенным к каретке и снабженным отходящим в боковом направлении рычагом для регулировки ориентации тушки птицы или ее частей относительно каретки. Вблизи указанного рычага или на нем расположена рама, которая может перемещаться вверх и вниз относительно первого вертикального стержня и к которой подвешен второй стержень, при этом указанная подвижность рамки обуславливает возможность перемещения второго стержня вверх и вниз при неизменной высоте расположения первого стержня. Крюк или крюки для подвешивания тушки птицы расположены на нижнем конце второго стержня. 2 н. и 19 з.п. ф-лы, 8 ил.
Комментарии