Автоматическое устройство для упаковки клипсованием и связанные с ним устройства, способы, системы и компьютерные программные продукты, пригодные для упаковывания цельной мышечной ткани - RU2531003C2
Код документа: RU2531003C2
Чертежи






























Описание
Настоящая заявка имеет приоритет заявки США Сер.№ 61/178,150 от 14 мая 2009 г., содержание которой полностью включено сюда путем ссылки.
Область техники
Данное изобретение относится к устройству, которое может упаковывать материалы, в которые помещают продукты, и в частности, может оказаться пригодным для заключения отдельных кусков цельной мышечной ткани в клипсованный сетчатый материал.
Уровень техники
Пищевые продукты и/или промышленные изделия некоторых типов можно упаковывать, помещая желаемый продукт (продукты) в покрывающий материал, а затем накладывают заделывающую клипсу (клипсы) на концевые части покрывающего материала, чтобы закрепить в нем продукт(ы). В случае не текучих штучных пищевых товаров, штучные пищевые товары можно хранить по отдельности в соответствующей упаковке, на которую нанесены клипсы, или как группу разделенных или объединенных (например, сжатых в брикет) товаров в одной упаковке. Покрывающим материалом может быть любой подходящий материал, как правило - оболочечный и/или сетчатый материал.
Например, системы включают желоб для сетки, который поддерживает отрезок сетчатого рукава на своей наружной поверхности. Первая находящаяся дальше по ходу концевая часть сетки, как правило, собрана в пучок и зажата с помощью первой клипсы. Когда продукт покидает желоб для сетки, он покрыт сеткой. Передний и задний края сетки можно собирать в пучки (выше по ходу от продукта) и зажимать эти пучки, обычно с использованием одиночных или двойных клипс, например, типа Tipper Tie®. Устройства для нанесения клипс или «клипсаторы» хорошо известны специалистам в данной области техники и включают механизмы от фирмы Tipper Tie, Inc., Апекс, штат Северная Каролина, США, включая изделия под номерами Z4, Z3214, Z3202 и Z3200. Примеры устройств для скрепления и/или упаковывания с использованием клипс описаны в патентах США №№ 3389533, 3499259, 4683700 и 5161347, а также в опубликованной заявке США 2008/0000196, содержание которых включено сюда полностью путем ссылки.
Существо изобретения
Варианты изобретения обеспечивают устройство, узлы и/или другие устройства, системы, способы и компьютерные программные продукты для загрузки и/или упаковывания целевого продукта. Некоторые варианты выполнения направлены на создание способов, систем и устройств, которые могут автоматически или полуавтоматически упаковывать продукт в покрывающем материале, например, таком, как сетчатый, и накладывать на него клипсы.
Некоторые варианты выполнения направлены на создание загрузочных желобов для упаковочной системы. Загрузочные желоба включают: потолок, имеющий, по меньшей мере, часть, выполненную с возможностью открывания и закрывания; и пол, лежащий под потолком и выровненный с возможностью взаимодействия с ним, при этом в закрытом, рабочем положении выполнение потолка и пола обеспечивает образование продуктовой камеры с аксиально продолжающимся открытым каналом между ними. По меньшей мере, один из пола и потолка совершает возвратно-поступательное перемещение в по существу вертикальном направлении между первым загрузочным положением, в котором по меньшей мере, часть потолка открыта, и вторым рабочим положением, в котором потолок закрыт, образуя продолжающийся аксиально открытый канал.
В конкретных вариантах выполнения, пол совершает вертикальное перемещение, и при этом в первом загрузочном положении пол находится на расстоянии ниже второго рабочего положения пола. Другие варианты выполнения направлены на создание упаковочных систем. Эти системы включают: a) каркас; (b) загрузочный желоб, прикрепленный к каркасу, причем загрузочный желоб имеет продуктовую камеру с полом, который совершает вертикальное перемещение; (c) удлиненный желоб для сетки, связанный с загрузочным желобом, прикрепленным к каркасу, причем желоб для сетки имеет внешнюю поверхность и противоположные принимающую и выгружную концевые части с продолжающейся через него внутренней полостью, при этом желоб для сетки имеет осевую центральную линию; (d) удлиненный продуктовый желоб, прикрепленный к каркасу, причем продуктовый желоб имеет противоположные принимающий и выгружной концы, при этом продуктовый желоб находится, по меньшей мере, частично во внутренней полости желоба для сетки, причем в рабочем положении продуктовый желоб выровнен по оси с загрузочным желобом и находится по ходу после него; и (e) клипсаторный механизм, расположенный по ходу после желоба для сетки и выровненный с ним с возможностью взаимодействия, причем клипсаторный механизм имеет конфигурацию, обеспечивающую нанесение, по меньшей мере, одной клипсы на сетчатый материал, в котором заключен продукт после того, как этот продукт покидает продуктовый желоб.
Система может иметь конфигурацию, обеспечивающую последовательное высвобождаемое прикрепление соответствующих пар «потолок - пол», ограничивающих соответствующие диаметры разных продуктовых камер загрузочного желоба, к каркасу, причем соответствующие пары предусмотрены с выбираемыми пользователем размерами для целевых продуктов в диапазоне размеров от около 2 до около 9 дюймов в диаметре.
Система может включать пару разнесенных продолжающихся вверх боковых стенок, которые располагаются на противоположных сторонах продуктовой камеры и образуют часть продуктовой камеры в загрузочной конфигурации, причем потолок выбранной пары «потолок - пол» поворотно прикреплен к верхней части одной из продолжающихся вверх боковых стенок, и при этом боковые стенки выполнены с возможностью регулирования в боковом направлении для согласования с разными парами «потолок - пол» с разными размерами диаметра от около 3 дюймов до около 8 дюймов.
Другие варианты выполнения направлены на создание способов загрузки целевого продукта для упаковывания. Эти способы заключаются в том, что: (a) вертикально перемещают пол загрузочного желоба вниз из рабочего положения; (b) загружают целевой продукт в загрузочный желоб при открытом потолке продуктового желоба; (c) закрывают потолок загрузочного желоба; затем (d) программно предписывают полу загрузочного желоба двигаться вверх для смыкания с потолком и образования по существу цилиндрической продуктовой камеры; и (e) сжимают целевой продукт, удерживаемый в продуктовой камере, в ответ на предписание полу двигаться вверх.
Еще одни варианты выполнения направлены на создание способов загрузки целевого продукта для упаковывания. Эти способы заключаются в том, что: (a) вертикально выдвигают выступающие вверх боковые стенки, прикрепленные к потолку загрузочного желоба, из рабочего положения; (b) загружают целевой продукт в загрузочный желоб при открытом потолке продуктового желоба и выдвинутых боковых стенках; (c) закрывают потолок загрузочного желоба; затем (d) автоматически вертикально перемещают боковые стенки и потолок загрузочного желоба вниз к полу, чтобы ограничить по существу цилиндрическую продуктовую камеру; и (e) сжимают целевой продукт, удерживаемый в продуктовой камере, в ответ на вертикальное перемещение потолка вниз.
Некоторые варианты выполнения направлены на создание способов загрузки отдельных кусков цельной мышечной ткани в упаковочной системе. Эти способы заключаются в том, что: (a) обеспечивают загрузочный желоб, имеющий продуктовую камеру с потолком и полом, совершающим возвратно-поступательное перемещение; (b) перемещают пол в направлении вниз в загрузочное положение; (c) поворачивают потолок загрузочного желоба в открытое положение; (d) загружают цельную мышечную ткань в продуктовую камеру загрузочного желоба, когда потолок открыт; (e) закрывают потолок; (f) осуществляют электронное запирание закрытого потолка; затем (g) автоматически перемещают пол вверх к потолку для сжатия цельной мышечной ткани в продуктовой камере; а затем (h) автоматически выдвигают механизм для толкания продукта с толкающей головкой для выталкивания сжатой цельной мышечной ткани из продуктовой камеры.
Еще одни варианты выполнения направлены на создание компьютерных программных продуктов для эксплуатации автоматических или полуавтоматических систем для упаковывания в сетки. Такой компьютерный программный продукт включает машиночитаемый носитель информации, имеющий машиночитаемый программный код, воплощенный в носителе. Машиночитаемый программный код включает: (а) машиночитаемый программный код, который оперативно контролирует, по меньшей мере, один сигнал из загрузочного желоба, имеющего продуктовую камеру с потолком и полом, по меньшей мере, один из которых совершает вертикальное перемещение, обеспечивая упрощенную загрузку продукта в продуктовую камеру, когда потолок открыт; и (b) машиночитаемый программный код, который автоматически предписывает приводу переместить, по меньшей мере, один из потолка или пола вертикально в рабочее положение после того, как данные сигнала подтверждают, что потолок закрыт.
Еще одни варианты выполнения направлены на создание легко загружаемого узла с подающим хоботом для упаковочного устройства. Этот узел включает: (a) первый удлиненный хобот, имеющий аксиально продолжающуюся трубу с первым диаметром и сквозной полостью, причем хобот имеет участок с противоположными первым и вторым концами, при этом один конец имеет скошенный фланец, продолжающийся по окружности и имеющий больший второй диаметр; и (b) установочный кронштейн с верхним и нижним хомутами, имеющими дугообразную форму, причем верхний и нижний хомуты имеют конфигурацию, обеспечивающую прием соответствующей верхней и нижней части фланца, продолжающегося по окружности, для высвобождаемого запирания желоба в его положении. Каждый из верхнего и нижнего хомутов имеет концевую часть, поворотно прикрепленную к соответствующей верхней и нижней поверхности установочного кронштейна.
В некоторых вариантах выполнения, установочный кронштейн имеет конфигурацию, обеспечивающую взаимозаменяемость при удержании множества разных хоботов, причем каждый хобот имеет трубчатую часть с отличающимся диаметром от около 3 до около 8 дюймов, при этом каждый хобот имеет конец с фланцем с окружной фаской и с одним и тем же диаметром.
В некоторых вариантах выполнения, упомянутый узел включает второй удлиненный хобот, выполнение которого обеспечивает взаимозаменяемость при установке на установочный кронштейн, причем второй хобот имеет аксиально продолжающуюся трубу с диаметром и сквозной полостью, которые отличаются от диаметра и сквозной полости первого хобота, и при этом второй хобот имеет участок с противоположными первым и вторым концами, при этом один конец имеет такой же скошенный фланец, продолжающийся по окружности и такой же диаметр, как первый хобот.
Еще одни варианты выполнения направлены на создание узла клипсаторного механизма, который включает: (a) клипсаторный механизм; (b) каркас, поддерживающий клипсаторный механизм; (c) кожух, который окружает каркас и в котором заключена, по меньшей мере, часть клипсаторного механизма; (d) зажимы в сообщении с клипсаторным механизмом, установленным на каркас; (e) доступный снаружи кронштейн, который продолжается наружу из кожуха и прикреплен к каркасу; и (f) привод зажимного механизма, который связан с зажимами и сводит их друг с другом, а затем отводит друг от друга, причем привод зажимного механизма имеет установочный корпус, прикрепленный к его концевой части, которое удерживается кронштейном для обеспечения перемещения привода зажимного механизма в одно из множества разных заданных боковых положений, так что зажимы имеют разные желательные исходные положения в соответствии с желаемым размером продукта, вследствие чего привод зажимного механизма имеет меньший рабочий ход для продуктов меньшего размера и больший рабочий ход для продуктов большего размера.
Кронштейн может иметь разнесенные верхнюю и нижнюю пластины, причем каждая из них снабжена парой отверстий, а каждое боковое определенное положение соответствует паре отверстий, выровненных на верхней и нижней пластинах. Установочный корпус может иметь пару продолжающихся вниз каналов. Кронштейн может включать продолжающуюся вверх рукоятку с выступающими вниз зубцами, которые проходят через отверстия в верхней пластине, каналы установочного корпуса и соответствующие выровненные отверстия в нижней пластине, которые позволяют пользователю удалять рукоятку с зубцами, перемещать установочный корпус в желаемое боковое положение, а затем вставлять рукоятку с зубцами для запирания привода в его положении.
Отметим, что аспекты изобретения, описанные применительно к одному варианту выполнения, могут быть включены в другой вариант выполнения, хотя их конкретное описание применительно к нему отсутствует. То есть все варианты выполнения и/или признаки любого варианта выполнения можно объединить любым способом и/или в любой комбинации. Заявитель оставляет за собой право изменять любой первоначально поданный пункт формулы изобретения или, соответственно, подавать любой новый пункт формулы изобретения, включая право на возможность корректировать любой первоначально поданный пункт формулы изобретения, делая его зависимым от любого другого пункта формулы изобретения и/или включающим любой признак упомянутого другого пункта формулы изобретения, хотя тот первоначально не был заявлен в таком виде. Эти и другие задачи и/или аспекты данного изобретения подробно поясняются в нижеследующем описании.
Краткое описание чертежей
Фиг.1 - вид в перспективе выгружного конца аппарата/системы для автоматического перемещения продукта по желобу продукта и последующего автоматического нанесения, по меньшей мере, одной клипсы в соответствии с вариантами изобретения.
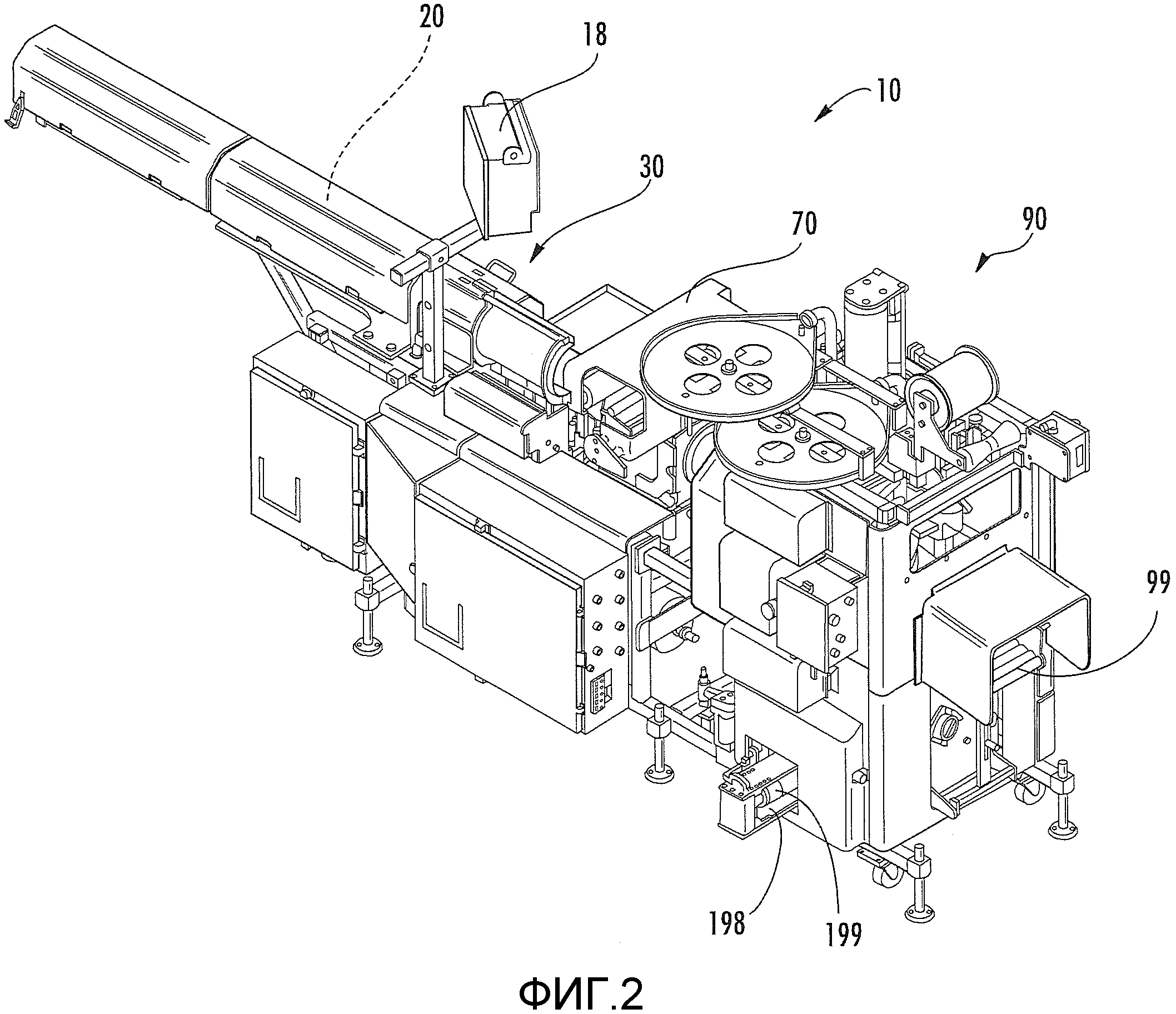
Фиг.2 - вид в перспективе выгружного конца противоположной стороны аппарата/системы, показанного/показанной на Фиг.1.
Фиг.3 - вид в перспективе сбоку части аппарата по Фиг.1 и 2, показывающий загрузочный желоб в открытой конфигурации в соответствии с вариантами изобретения.
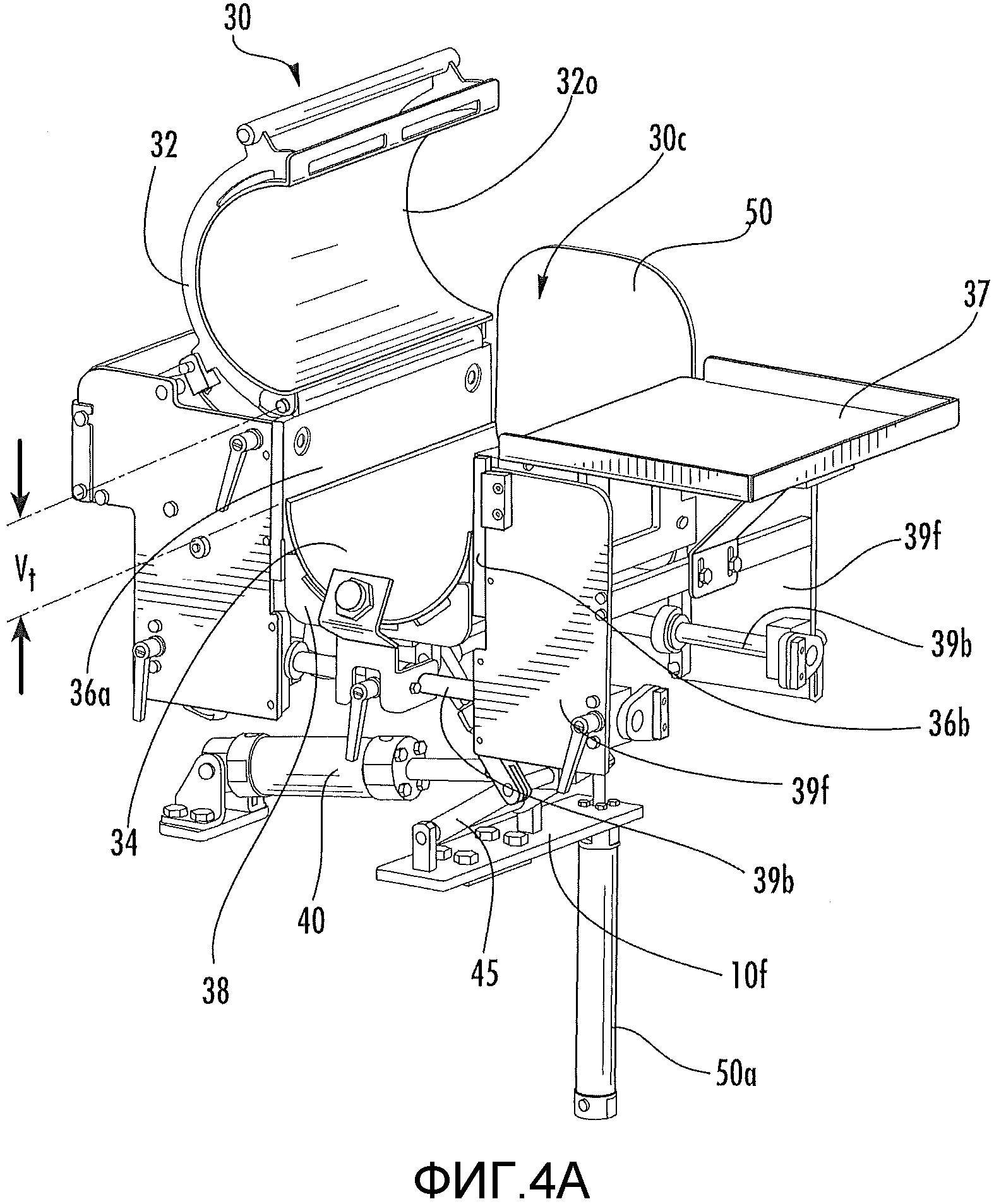
Фиг.4А - вид в перспективе с торца узла загрузочного желоба с загрузочным желобом, показывающий потолок в открытом положении и пол в отведенном положении в соответствии с вариантами изобретения.
Фиг.4В - вид в перспективе с торца узла загрузочного желоба с загрузочным желобом, показывающий потолок в закрытом положении и пол в вертикально поднятом положении в соответствии с вариантами изобретения.
Фиг.5А - вид в перспективе сбоку загрузочного желоба в открытом положении с полом, отведенным для загрузочного желоба большого размера (диаметра), в соответствии с вариантами изобретения.
Фиг.5В - вид в перспективе сбоку загрузочного желоба по Фиг.5А с закрытой крышкой и отведенным полом в соответствии с вариантами изобретения.
Фиг.5С - вид в перспективе сбоку загрузочного желоба по Фиг.5А и 5В, но показывающий пол, выдвинутый для смыкания с крышкой, образуя камеру желоба, в соответствии с вариантами изобретения.
Фиг.6А - вид в перспективе сбоку загрузочного хобота в открытом положении с полом, отведенным для загрузочного желоба малого размера (диаметра), в соответствии с вариантами изобретения.
Фиг.6В - вид в перспективе сбоку загрузочного желоба по Фиг.6А, с закрытой крышкой и отведенным полом в соответствии с вариантами изобретения.
Фиг.6С - вид в перспективе сбоку загрузочного желоба по Фиг.6А и 6В, но показывающий выдвинутый пол в соответствии с вариантами изобретения.
Фиг.7А - вид с торца загрузочного желоба по Фиг.5А, показывающий привод и подъемный механизм в соответствии с вариантами изобретения.
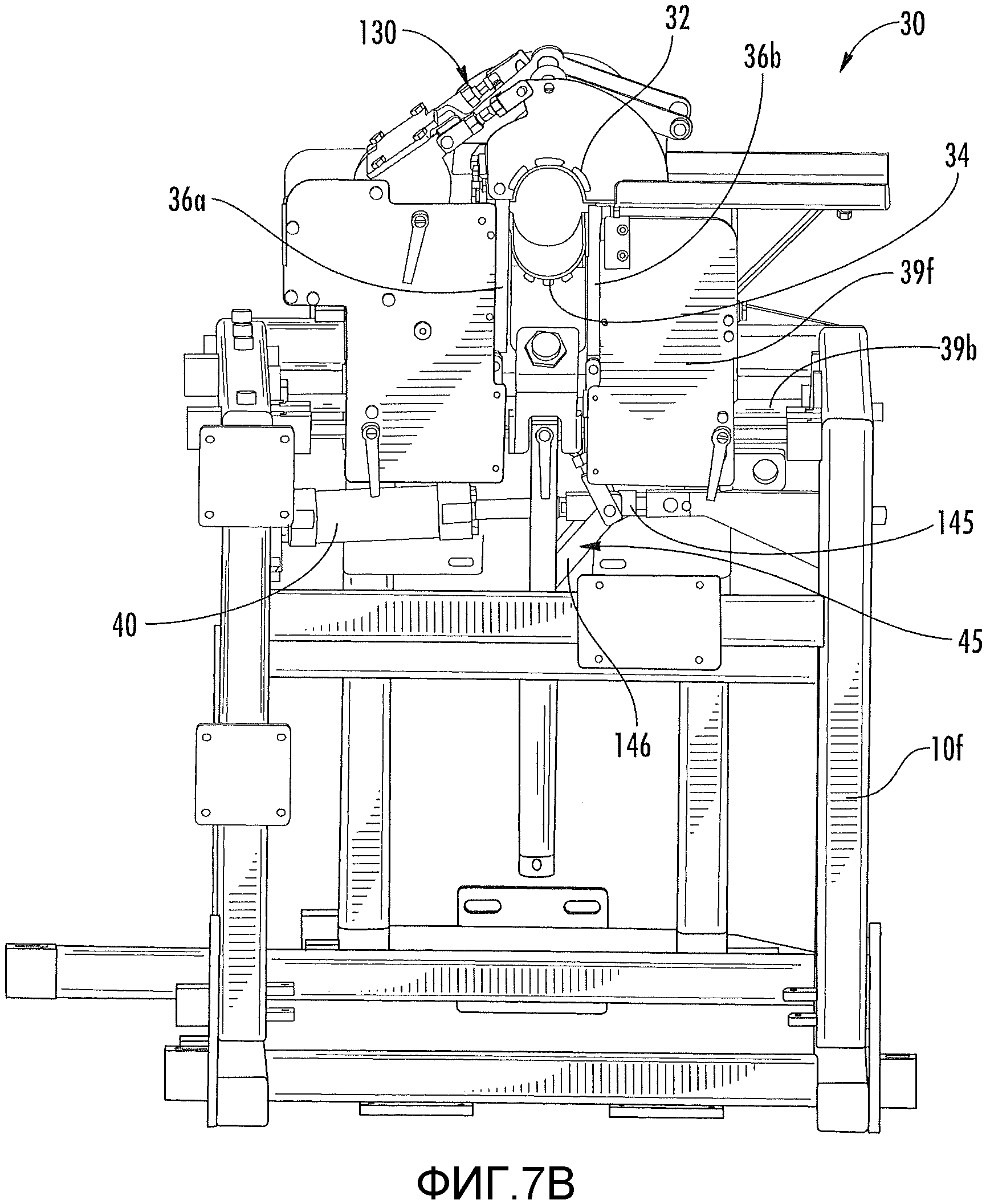
Фиг.7В - вид с торца загрузочного желоба по Фиг.6А, показывающий привод с упором/ограничителем вертикального опускания в соответствии с вариантами изобретения.
Фиг.8 - схематический вид с торца согласно альтернативному варианту выполнения загрузочного желоба, соответствующему другим вариантам изобретения.
Фиг.9 - схематический вид загрузочных желобов разных размеров в сообщении с желобов продукта и желобов сеток, которые могут последовательно (избирательно) работать с системой, обеспечивая потребителям больше вариантов выбора одиночного аппарата в соответствии с вариантами изобретения.
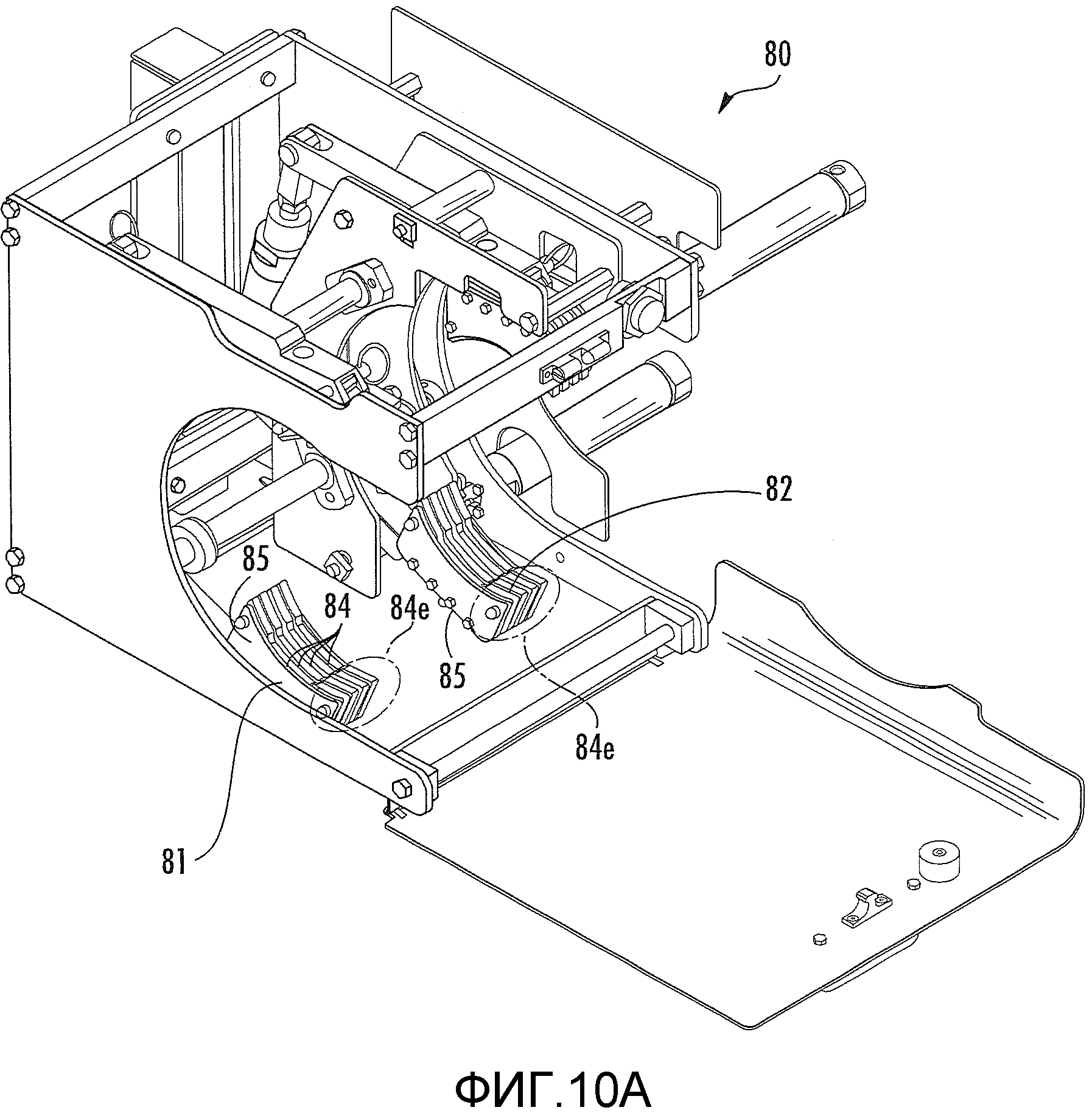
Фиг.10А - вид в перспективе с торца тормозного модуля с имеющей много краев захватной поверхностью в соответствии с вариантами изобретения.
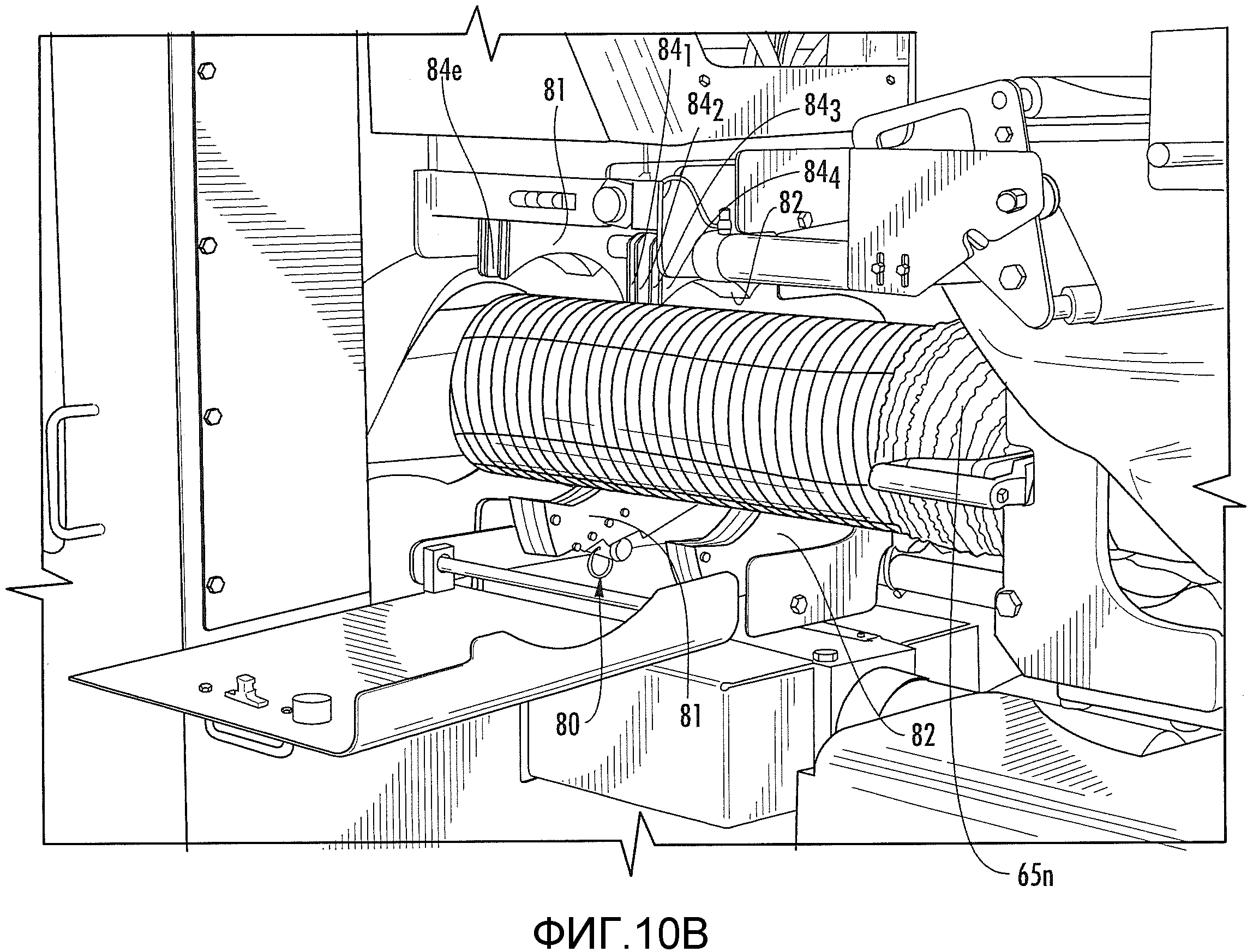
Фиг.10В - вид в перспективе сбоку тормозного модуля, показанного в положении над желобом для сетки в соответствии с вариантами изобретения.
Фиг.11А - вид в перспективе сбоку узла хобота с легко выравниваемой установочной конфигурацией в соответствии с вариантами изобретения.
Фиг.11В - покомпонентный вид хобота для продукта, который установлен внутри желоба для сетки в узле по Фиг.11А.
Фиг.12А - вид с торца замка, используемого для крепления с возможностью освобождения хоботов в соответствии с вариантами изобретения.
Фиг.12В - вид с торца замка по Фиг.12А, показывающий замок в сцепленной конфигурации (хобот, расположенный в положении, не показан).
Фиг.12С - вид в перспективе сбоку замка по Фиг.12А, показывающий возможный хобот, выровненный с замком, в соответствии с вариантами изобретения.
Фиг.12D - вид в перспективе сбоку замка и хобота, показанных на Фиг.12С, показывающий замок, прикрепленный к хоботу.
Фиг.12Е - частично покомпонентный вид в перспективе в увеличенном масштабе хобота и замка по Фиг.12D в соответствии с вариантами изобретения.
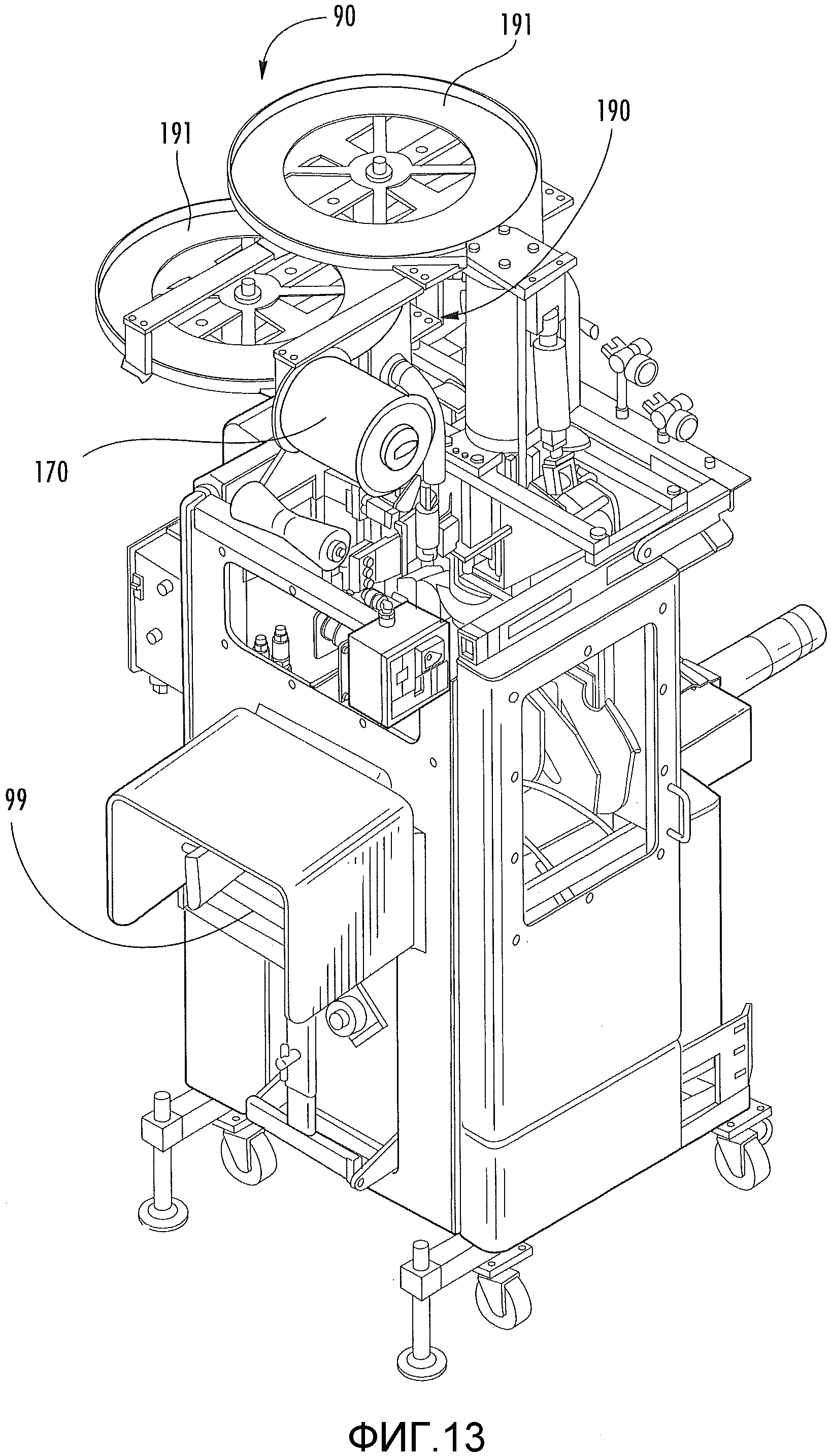
Фиг.13 - вид в перспективе с торца модуля клипсатора в соответствии с вариантами изобретения.
Фиг.14 - вид в перспективе с торца модуля клипсатора по Фиг.13, показывающий вертикальную подачу петлевателей в соответствии с некоторыми вариантами изобретения.
Фиг.15А - вид в перспективе сбоку части модуля клипсатора, показывающий зажимной узел в соответствии с вариантами изобретения.
Фиг.15В - вид с торца модуля клипсатора по Фиг.15А, показывающий зажим в закрытой конфигурации и привод, удерживаемый в первом боковом положении с помощью кронштейна в соответствии с вариантами изобретения.
Фиг.15С - вид с торца модуля клипсатора по Фиг.15В, показывающий зажимы, открытые для большего продукта.
Фиг.15D - вид с торца модуля клипсатора по Фиг.15А, показывающий зажим в открытой конфигурации (с меньшим окном) и привод, удерживаемый во втором боковом положении с помощью кронштейна для продуктов меньшего размера в соответствии с вариантами изобретения.
Фиг.16 - покомпонентный вид в перспективе сбоку кронштейна и привода, показанных на Фиг.15A-15D в соответствии с вариантами изобретения.
Фиг.17 - схематичный вид схемы управления в соответствии с вариантами изобретения.
Фиг.18-20 - блок-схемы последовательностей иллюстративных операций, которые можно использовать для реализации вариантов изобретения.
Фиг.21 - блок-схема системной/компьютерной программы обработки данных в соответствии с вариантами изобретения.
Описание вариантов выполнения изобретения
Теперь данное изобретение будет описано подробнее со ссылками на прилагаемые чертежи, где показаны варианты выполнения изобретения. Вместе с тем, это изобретение можно воплотить во многих других формах, и его не следует считать ограничиваемым вариантами выполнения, приведенными здесь. Одинаковые позиции везде обозначают одинаковые элементы. На чертежах некоторые слои, компоненты или признаки могут быть чрезмерно увеличены для ясности изображения, а пунктирные линии иллюстрируют воплощаемые по выбору признаки или операции, если специально не указано иное. Кроме того, последовательность операций (или стадий) не образуется порядком, представленным в пунктах формулы изобретения или на чертежах, если специально не указано иное.
Употребляемая здесь терминология имеет целью лишь описание конкретных вариантов выполнения, а не предназначена для образования изобретения. В том смысле, в каком они употребляются здесь, формы единственного числа следует рассматривать как включающие также формы множественного числа, если в контексте ясно не указано иное. Также следует понять, что когда в этом описании употребляются термины «содержит(ат)» и/или «соржащий(ая, ее, ие)», они указывают на наличие изложенных признаков, целых чисел, стадий, операций, элементов и/или компонентов, но не исключают присутствие или добавление одного или нескольких других признаков, целых чисел, стадий, операций, элементов, компонентов и/или их групп. В том смысле, в каком он употребляется здесь, термин «и/или» включает любые и всякие комбинации одного или нескольких перечисленных здесь возможных вариантов. В том смысле, в каком они употребляется здесь, словосочетания, такие как «от Х до Y» и «в диапазоне приблизительно от Х до Y», следует интерпретировать как включающие Х и Y. В том смысле, в каком они употребляется здесь, словосочетания, такие как «в диапазоне приблизительно от Х до Y», означают «от около Х до около Y».
Если не определено иное, все употребляемые здесь термины (включая технические и научные термины) имеют такой же смысл, в каком обычно их понимает обычный специалист в данной области техники, к которой принадлежит это изобретение. Следует также понять, что термины, такие как те, которые обычно употребляются в словарях, следует интерпретировать как имеющие смысл, совпадающий с их смыслом в контексте этого описания и релевантной области техники, и не следует интерпретировать как в неком идеализированном или чересчур формальном смысле, если он явно не определен здесь. Из соображений краткости и/или ясности, описание хорошо известных функций или конструкций может быть опущено.
Следует понять, что когда элемент называется находящимся «на» другом элемента, «прикрепленным» к другому элементу, «соединенным» или «контактирующим» с другим элементом, и т.д. он может непосредственно находиться на другом элемента, быть прикрепленным к другому элементу, соединенным или контактирующим с другим элементом, либо могут присутствовать также промежуточные элементы. В отличие от этого, когда элемент называется находящимся, например, «непосредственно на» другом элементе, «непосредственно прикрепленным» к другому элементу, «непосредственно соединенным», «непосредственно сочлененным» или «непосредственно контактирующим» с другим элементом, между ними промежуточных элементов нет. Специалисты в данной области техники также поймут, что ссылки на конструкцию или особенность конструкции, которая находится «рядом» с другой особенностью конструкции, могут иметь части, которые располагаются над или под соседней особенностью конструкции. Термины, относящиеся к пространству, такие как «под», «ниже», «нижний», «над», «верхний» и т.п., могут употребляться здесь для простоты изложения, чтобы описать один элемент или взаимосвязь особенности конструкции с другим элементом (другими элементами) или другой особенностью (другими особенностями) конструкции, которые показаны на чертежах. Должно быть ясно, что термины, относящиеся к пространству, следует считать охватывающими разные ориентации устройства при использовании или работе, в дополнение к ориентации, проиллюстрированной на чертежах. Например, если устройство на чертежах перевернуто, элементы, описанные как находящиеся «под» другими элементами или особенностями конструкции или «ниже» их, тогда могут быть ориентированы «над» другими элементами или особенностями конструкции. Таким образом, возможный термин «под» может охватывать и ориентацию над, и ориентацию под чем-либо. В противном случае, устройство может быть ориентировано по-другому (повернуто на 90 градусов или расположено с соблюдением других ориентаций), и тогда можно соответствующим образом интерпретировать употребляемые здесь дескрипторы, относящиеся к пространству.
Должно быть ясно, что, хотя для описания различных элементов, компонентов, областей, слоев и/или участков здесь могут употребляться термины «первый», «второй» и т.д., эти элементы, компоненты, области, слои и/или участки этими терминами не образуются. Эти термины употребляются лишь для того, чтобы отличить один элемент, компонент, одну область, один слой или участок от другого элемента, компонента, другой области, другого слоя или участка. Таким образом, в рамках положений данного изобретения, первый элемент, компонент, первая область, первый слой или участок, рассматриваемые ниже, могут быть названы вторым элементом, компонентом, второй областью, вторым слоем или участком.
В нижеследующем описании вариантов изобретения употребляются определенные термины, обозначающие позиционную взаимосвязь заданных конструкций по отношению к другим конструкциям. В том смысле, в каком они употребляются здесь, термины «переднее», «вперед» и их производные относятся к обычному или главному направлению, в котором движется целевой продукт для заключения в обертку и/или нанесения клипс; этот термин употребляется как эквивалент выражениям «дальше по ходу» или «по ходу после», которые часто употребляются при описании производственный линий или потоков материалов, чтобы указать, что некоторый материал, движущийся или подвергающийся воздействию, продвигается дальше в таком процессе, чем другой материал. В отличие от этого, термины «назад», «раньше по ходу», «перед по ходу» и их производные обозначают направления, противоположные, соответственно, направлениям вперед и дальше по ходу.
Термин «каркас» означает в основном скелетную конструкцию, используемую для опоры одного или более узлов, модулей и/или компонентов. Каркас может быть одной цельной конструкцией или множеством отдельных конструкций, устанавливаемых друг на друга или на общую конструкцию пола или аналогичную конструкцию. Термин «модульный» означает, что такой узел выполнен со стандартизованными размерами, особенностями установки конструкции и/или выполнением и, предназначенными для взаимозаменяемости при эксплуатации с заменяющими модулями того же самого или аналогичного типа и/или другими выбранными отличающимися модулями. Термин «модуль» может относиться к узлу или подузлу, который включает определенные компоненты, особенности конструкции или устройства, крепящиеся к каркасу и выполняющие конкретно заданные функции. Вместе с тем, когда термин «модуль» употребляется применительно к работе контроллера или компьютера, он обозначает схему, в которой заключен код компьютерной программы. Каркас и выбранные узлы также могут иметь конфигурацию, обеспечивающую избирательную установку на правой или левой стороне общего каркаса, или некоторые модули могут иметь конфигурацию, обеспечивающую их использование с более чем одной упаковочной системой. Термины «привод» или «силовой цилиндр» и их производные употребляются в их родовом значении для указания любого типа автоматического приводного элемента, включая, например, электрические, пневматические и гидравлические цилиндры со штоками. Термин «с казенной части» относится к вводу (с казенной части) продукта через дверцу или потолок загрузочного желоба. Термин «загрузочный желоб» также можно описать как «желоб, расположенный с казенной части».
Варианты изобретения пригодны, в частности, для устройств, которые работают с клипсаторами для нанесения заделывающих клипс на объекты, удерживаемые в покрывающем материале. Покрывающий материал может быть натуральным или синтетическим и может быть оболочечным материалом, который можно герметизировать вокруг продукта, или может быть сетчатым. Оболочка может быть любой подходящей оболочкой (съедобной или несъедобной, натуральной или синтетической), такой как - но не в ограничительном смысле - коллагеновая, целлюлозная, пластиковая, эластомерная или полимерная оболочка. В заданных вариантах выполнения, оболочка содержит сетку. Термин «сетка» относится к любому материалу с открытыми ячейками в любой форме, включая, например, узловязальный, плетеный, экструдированный, тисненый, вязаный, тканый или полученный иным образом материал. Как правило, сетка имеет конфигурацию, обеспечивающую растяжимость, как в осевом, так и в поперечном направлениях.
Сетку или другой покрывающий материал можно использовать для упаковывания отдельных мясных продуктов, таких, как батоны мяса, окорок с костью, ветчина, нарезанная спиральными ломтями, бескостный окорок, тушка индейки, батоны из индейки, выдерживаемые в формах, или другое мясо либо разновидности мясопродуктов непосредственно, или разновидности мясопродуктов, выдерживаемые в субконтейнерах и/или обертках, таких, как формы, лотки, ящики, мешки, поглощающие или защитные листы, герметик, банки и т.п. Другие варианты изобретения могут быть направлены на создание упаковок других типов для пищи, такой как сыр, хлеб, фрукты, овощи и т.п., а также непищевых товаров. Примеры непищевых товаров, которые можно упаковывать с использованием вариантов изобретения, включают товары живой природы, такие как растения, деревья, земля и т.п., а также объекты, не относящиеся к живой природе. Дополнительные примеры продуктов включают отдельные, полутвердые или твердые объекты, такие как дрова, корм для домашних животных (как правило, хранящийся в контейнере, если он относится к типу увлажняемых продуктов), объекты для отдыха (такие как мячи), или другие твердые или полутвердые объекты. Возможно упаковывание продута для любой подходящей области деятельности, включая садоводство, водное хозяйство, сельское хозяйство или другую отрасль пищевой промышленности, охрану окружающей среды, химию, производство взрывчатых веществ или иное приложение. В частности, сетку можно использовать для упаковывания цельной мышечной ткани (сырого мяса), окорока или тушек индейки, готовых металлических изделий, таких, как детали автомобилей, упаковки дров, взрывчатых веществ, формованных продуктов и других промышленных, потребительских и/или товарных изделий в единственном или множественном числе.
Вообще говоря, некоторые конкретные варианты изобретения направлены на автоматизацию упаковывания отдельных кусков продукта в виде цельной мышечной ткани путем автоматического выталкивания кусков цельной мышечной ткани (одновременно) по желобу продукта и оборачивания или заворачивания объектов на другом конце желоба в сетку (например, «открытую сетку», таким образом, что находящаяся в ней цельная мышечная ткань открыта для воздействия условий окружающей среды) с последующим автоматическим или полуавтоматическим нанесением на покрывающий материал заделывающего зажима или другого крепежного средства для заделки покрытия и удержания объекта или объектов внутри покрывающего материала. Упаковочные системы могут - по выбору - включать коллагеновую пищевую пленку для формирования модуля, образующую трубчатый белковый слой поверх сжатой цельной мышечной ткани (например, это может быть материал COFFI, продаваемый фирмой Naturin), или другое тонкое покрытие, которое затем накрывают сеткой.
Заключенная в сетку цельная мышечная ткань может находиться в одной-единственной упаковке, или может быть упакована в серию связанных упаковок (таких, как аналогичные так называемым «голавлям»). Цельная мышечная ткань может быть обработана таким образом, что белок станет мигрировать к внешней поверхности или оседать вблизи нее, вследствие чего смежные куски цельной мышечной ткани могут объединяться, скрепляться и/или связываться, когда они удерживаются в сетке во время последующей обработки, и при этом не требуется никакого сжатия цельной мышечной ткани во время упаковывания в сетку. В других вариантах выполнения возможны совместное сжатие и упаковывание кусков цельной мышечной ткани, как с применением, так и без применения внешнего слоя коллагеновой пленки внутри сетки. Если имеется структура звеньев, то пространство между звеньями реального продукта, заключенного в сетку, может иметь разную протяженность, обеспечивая (при отсутствии контакта между смежными звеньями продукта, заключенного в сетку) воздействие условий обработки (например, дыма из коптильни) на смежные концы цельной мышечной ткани, заключенной в сетку.
На Фиг.1-2 показан вариант выполнения автоматического устройства 10 для упаковки клипсованием. Как показано, устройство 10 может включать один или несколько контроллеров 18, которые могут быть встроены в интерфейс «человек - машина» (ИЧМ) или осуществлять с ним связь, автоматический узел или механизм 20 для толкания продукта, загрузочный желоб 30, продуктовый желоб 60, желоб 65 для сетки, устанавливаемый по выбору модуль 70 формирования белковой или коллагеновой пленки, тормозной модуль или узел 80 (который также может функционировать как заполняющий пустоты и/или устраняющий складки узел), модуль или узел 90 клипсатора и устанавливаемый по выбору стол 99 с выгружными валиками.
На Фиг.2 также показано, что система 10 может включать выступающий наружу кронштейн 198, который выходит из кожуха вблизи узла 90 нанесения клипс и удерживает привод 199 зажимного механизма таким образом, что обеспечивает установку привода 199 в разных заданных боковых положениях в соответствии с размером целевого продукта для согласования со многими размерами продуктов обычно от 2 дюймов до 10 дюймов, например, начиная с продуктов диаметром около 3 дюймов и кончая продуктами диаметром около 8 дюймов при перемещении зажимов, регулируемом в сторону уменьшения для продуктов меньшего размера и увеличения для продуктов большего размера, как будет дополнительно рассмотрено ниже применительно к Фиг.15.
На Фиг.3 показан загрузочный желоб 30 в положении с потолком 32, поднятым и готовым для загрузки продукта в удерживающую камеру 30с продукта. Загрузочный желоб 30 находится по ходу после механизма 20 для толкания продукта, когда толкающая головка продукта находится в «исходном» или отведенном положении и выше по ходу от желоба 60 продукта. Для подтверждения положения толкающей головки и синхронизации запирания или приведения в действие блокирующего элемента 50, отпирания замка желоба 30 и т.п., можно использовать датчик 20s приближения. Блокирующий элемент 50 для толкания продукта можно использовать для ловли толкающей головки позади блокирующего элемента 50, когда загрузочный желоб 30 открыт. Контроллер 18 может осуществлять оперативный контроль электронными средствами, чтобы определить, открыт ли потолок загрузочного желоба 30, и электронными же средствами отводить привод 50a (Фиг.4A), связанный с блокирующим элементом 50, только после того, как потолок оказывается закрытым, а камера 30c оказывается в рабочем положении.
На Фиг.4A и 4B показан загрузочный желоб 30 с потолком 32 и вертикально перемещающимся полом 34. В этом варианте выполнения, каждый из потолка 32 и пола 34, соответственно, может быть полуцилиндрическим (имея по существу полукруглую форму или по существу форму полукруга, если смотреть с торца), и они могут быть сопряжены, образуя по существу цилиндрическую продуктовую камеру 30с. Вместе с тем, можно использовать и другие формы.
Как показано, пол 34 может поступательно двигаться на расстояние «Vt» между загрузочным положением (Фиг.4A) и закрытым, рабочим положением (Фиг.4B). Вертикальное перемещение Vt может составлять от 1 дюйма до 10 дюймов, в типичном случае от около 1,5 дюймов до около 2,75 дюймов. Выполнение пола 34 может предусматривать наличие двух альтернативных положений упора, одно - на первом уровне, таком, как около 1,5 дюйма, а другое - на более низком втором уровне, таком, как около 2,75 дюйма. Уровень опускания на 1,5 дюйма может оказаться пригодным, в частности, для желобов меньшего размера, таких, диаметры которых располагаются в диапазоне диаметров от 3 дюймов до 5 дюймов. Большее опускание может оказаться пригодным, в частности, для бóльших размеров желобов, например, таких как находящиеся от 6 дюймов до 8 дюймов. Загрузочный желоб 30 с совершающим вертикальное перемещение полом и/или с камерой регулируемого размера для загрузки можно использовать с показанной системой, или он может оказаться полезным для других упаковочных и/или накладывающих клипсы систем.
В загрузочной конфигурации или загрузочном положении, как показано на Фиг.4A, пол 34 (например, лоток) перемещается на некоторое расстояние вниз, открывая две продолжающиеся вверх боковые стенки 36a, 36b. Боковые стенки 36a, 36b могут содержать покрытие из полимера DELRTN® или другого подходящего материала, либо материал, который можно очистить для производства пищевых продуктов. Когда пол 34 вертикально отводится, внешняя стенка пола 34 может скользить по боковым стенкам 36a, 36b. Боковые стенки 36a, 36b и/или внешняя поверхность пола 34 может содержать скользкое покрытие или скользкий материал. Пара разнесенных выступающих вверх боковых стенок 36a, 36b располагаются на противоположных сторонах продуктовой камеры 30с под потолком 32 и образуют часть продуктовой камеры 30с, когда пол 34 находится в загрузочном положении (Фиг.4A). Боковые стенки 36a, 36b и потолок 32 могут быть стационарными в вертикальном направлении, оставаясь в фиксированном вертикальном положении, когда они установлены на своем месте на каркасе.
Как показано на Фиг.4A и 4B, потолок 32 может быть поворотно прикреплен к одной выступающей вверх боковой стенке 36a. В других вариантах выполнения, потолок 32 может включать окно, которое скользит или поворачивается, переходя в открытую (не показана) или другую конфигурацию, позволяющую пользователю обеспечить проем в загрузочном желобе 30 для загрузки целевого продукта (например, такого как цельная мышечная ткань).
В рабочем положении или рабочей конфигурации, как показано на Фиг.4B, при закрытом потолке (см. позицию 32c), загрузочный желоб 30 может ограничивать по существу цилиндрическую камеру 30c продукта с проходящей или проходящим аксиально сквозной полостью или сквозным каналом, так что механизм 30 для толкания продукта может выталкивать продукт через камеру 30c и дальше в продуктовый желоб 60.
Система 10 может иметь конфигурацию, обеспечивающую прохождение продуктов с разными размерами диаметра, как правило, находящимися от 2 дюймов до 9 дюймов, например, начиная с продуктов диаметром около 3 дюймов и кончая продуктами диаметром около 8 или 8,5 дюймов, с приращениями, составляющими приблизительно 0,5 дюйма или 1 дюйм. Хобот 60 для продукта может быть предусмотрен с разными соответствующими размерами для согласования с размерами загрузочных желобов 30 (например, с диметром, если речь идет о цилиндрической закрытой конфигурации). Желоб 65 для сетки также может быть предусмотрен в ассортименте подходящих размеров для согласования с желательными размерами разных продуктов. Контроллер 18 может иметь программно выбираемое меню режимов работы, которые являются специфичными по средствам и могут включать размер продукта в качестве одного входного параметра для выбора параметров торможения и нанесения клипс для автоматизированного управления, и т.п. Соответственно, загрузочный желоб 30 может быть выполнен в диапазоне разных размеров с соответствующими парами компонентов «потолок - пол» 32, 34, соответственно, выполнение которых обеспечивает желательный диаметр продуктовой камеры, связанный с желательным размером продукта (например, обеспечивает камеру диаметром около 3 дюймов для продукта диаметром около 3 дюймов.
Каркас и боковые стенки 36a, 36b могут быть выполнены с возможностью регулирования для приема потолков и каркасов разного размера. Например, как показано на Фиг.4A, боковые стенки 36a, 36b крепятся к соответствующим опорным каркасам 39f в соответствующих местах спереди и сзади (т.е. разнесенным в продольном направлении). Как показано, две разнесенные поперечины 39b (одна - спереди, и одна - сзади) крепятся к каркасам 39f (передняя поперечина 39b прикреплен к двум передник каркасам 39f, задняя поперечина прикреплен к двум тыльным или задним каркасам 39f), а их конфигурации обеспечивают поперечное регулирование положения боковых стенок 36a, 36b друг относительно друга. Таким образом, размер промежутка между ними позволяет с удобством удерживать пары «пол - потолок» разного размера, так что пол может упираться в боковые стенки 36a, 36b.
Каждый потолок 32, связанный с камерами, имеющими диаметры разного размера (измеряемые, когда камеры закрыты, т.е. в цилиндрической конфигурации), можно поворотно крепить к верхней части одной из боковых стенок-36a. Соответствующе пары «пол - потолок» (см., например, Фиг.5A, 6A) можно предусмотреть в ассортименте диаметров камер продукта, включающем, по меньшей мере, множество следующих величин: около 3 дюймов, около 3,5 дюйма, около 4,0 дюйма, около 4,5 дюйма, около 5,0 дюймов, около 5,5 дюймов, около 6,0 дюймов, около 6,5 дюймов, около 7,0 дюймов, около 7,5 дюймов, около 8,0 дюймов и около 8,5 дюймов.
В варианте выполнения по Фиг.4A, 4B, боковые стенки 36a, 36b и потолок 32 могут быть стационарными. Пол 34 может находиться в люльке 38, опирающейся на каркас 10f. Пол 34 может быть связан с приводом 40, который направляет вертикальное перемещение. Привод 40 может быть прикреплен к подъемному механизму 45, который находится под полом 34, прикрепленным к люльке 38, что обуславливает вертикальное перемещение пола 34 в желательные промежутки времени. Как показано на Фиг.4B, пол 34 может двигаться вверх, накрывая боковые стенки 36a, 36b. В некоторых вариантах выполнения, подъемный механизм 45 может иметь конфигурацию, обеспечивающую достаточную силу, способную сжимать продукт, удерживаемый в камере 30с продукта, когда потолок 32 закрыт (см. позицию 32c) и камера 30c находится в рабочем положении, показанном на Фиг.4B. Потолок 32 и пол 34 желоба 30 продукта могут не быть герметизированы в рабочем положении (Фиг.4B), но, как правило, внешние границы каждого из них располагаются близко друг к другу, как показано.
Система 10 может включать стол 37, который находится вблизи загрузочного желоба 30, позволяя оператору класть объекты, такие как плиты цельной мышечной ткани, на стол 37 и сталкивать их со стола в желоб 30, когда потолок 32 открыт. Этот стол можно назвать столом для загрузки «с казенной части», поскольку оператор может стоять сбоку от толкающего механизма и желоба, проводя загрузку в желоб 30. Можно также использовать автоматизированные загрузчики (не показаны).
На Фиг.5A-5C показаны три разные конфигурации, которые может иметь загрузочный желоб, во время цикла загрузки и упаковывания. Эти чертежи иллюстрируют случай загрузочного желоба 30 большого размера (скажем, имеющего размер около 8 дюймов в диаметре. На Фиг.6A-6C показаны те же три конфигурации для загрузочного желоба малого размера (например, имеющего размер около 3 дюйма в диаметре). Размер люльки 38 можно изменять для сопряжения с полом 34, а каждая люлька 38 может иметь конфигурацию, предназначенную специально для пола 34 конкретного размера с целью взаимозаменяемости при установке в одной и той же конфигурации каркасов между боковыми стенками 36a, 36b и работы с одним и тем же подъемным механизмом 40, 45.
На Фиг.7A и 7B показано, что привод 40 связан с подъемным механизмом 45, который включает упор 145, который можно перебрасывать в нужное место (Фиг.7B), чтобы ограничить «опускание» или вертикальное перемещение пола 34. Это может оказаться полезным для желобов 30 меньшего размера, чтобы продукт оставался видимым, когда крышку открывают во время загрузки, и чтобы ограничить перегрузку желоба 30 продуктом. «Опускание» может быть опусканием около 1-1,5 дюйма для загрузочного (например, расположенного с казенной части) желоба 30 диаметром 3 дюйма. Упор 145 может представлять собой механический упор, который образует рабочий ход штока в сообщении с силовым цилиндром. Когда упор 145 находится в одном положении, будучи введенным в зацепление с подъемным механизмом 45 и/или штоком силового цилиндра, пол перемещается на расстояние Vt в положение короткого опускания, а когда он находится в другом положении (например, выведен из зацепления), пол перемещается в более глубокое или удаленное положение опускания (как правило, оно оказывается подходящим для желобов большего размера).
Подъемный механизм 45 может включать разнесенные верхние и нижние звенья 146, каждая пара которых поворотно скреплены друг с другом в среднем сочленении 46, а привод 40 может включать передний элемент 41, который прикреплен к сочленениям 46. Привод 40 можно выдвигать и отводить в поперечном направлении (вбок). В ответ на это, подъемный механизм 45 может изгибаться вокруг сочленений 46, когда пол 34 отводят, и может продолжаться по существу выровненным с соблюдением вертикального выравнивания, когда пол 34 полностью выдвинут (Фиг.4B).
На Фиг.8 показано, что потолок 32 может иметь конфигурацию, обеспечивающую его вертикальное перемещение вместо пола 34 (или в дополнение к нему). В этом варианте выполнения, потолок 32 прикреплен к одной - 36а - из боковых стенок, а обе боковые стенки 36a, 36b могут иметь конфигурацию, обеспечивающую вертикальное выперемещение и отвод для подъема и опускания потолка (и - в типичном случае - увеличения объема и/или размера продуктовой камеры) при загрузке. Боковые стенки 36a, 36b можно крепить к одному или нескольким (показаны лишь два) приводам 40, которые вызывают возвратно-поступательное перемещение.
В других вариантах выполнения, и пол 34, и потолок 32 могут иметь конфигурацию, обеспечивающую вертикальное перемещение между загрузочным и рабочим положениями, так что они перемещаются друг от друга по существу синхронно в первое, загрузочное положение, открывая по существу вертикально продолжающиеся разнесенные боковые стенки, когда потолок открыт. Они (пол и потолок) также перемещаются навстречу друг другу, когда потолок закрывается, образуя по существу цилиндрическую продуктовую камеру.
На Фиг.4B показано, что загрузочный желоб 30 может включать замок 130, который активируется и деактивируется электронными средствами с помощью контроллера 18 (либо другой схемы или другого процессора). Замок 130 может включать привод 130a, который приводится в действие контроллером 18 (либо другой схемой или другим процессором) для управления, когда оператор может открыть потолок 34, на основании местонахождения механизма 20 для толкания продукта и на основании того, находится ли пол 34 в загрузочном положении (Фиг.4A), перед тем как оператор получает возможность открыть потолок 32 загрузочного желоба 30. Загрузочный желоб 30 также может иметь конфигурацию, обеспечивающую автоматическое открывание потолка 32, когда пол 34 находится в должном положении, а желоб 20 продукта (если он используется) находится в исходном положении либо находится выше по ходу от желоба 30. Загрузочный желоб 30 может включать датчик 131, который находится в некотором месте в окрестности укупорочной крышки и который указывает, когда крышка 32 закрыта (Фиг.5A, 6A). Датчик 131 может быть датчиком приближения, например, таким, как оптический датчик (инфракрасный датчик, фотодатчик или аналогичный датчик), датчик, основанный на эффекте Холла, магнитный датчик, индуктивный датчик и/или любой другой подходящий датчик. Контроллер 18 может оперативно контролировать состояние этого датчика для управления в случаях, когда надо поднимать и опускать пол 34.
На Фиг.9 показано, что система 10 может иметь конфигурацию, обеспечивающую прием некоторого количества загрузочных желобов 30 разного размера, обозначенных символами A, B и C, каждый из которых имеет диаметры под продукты разного размера, как правило, от 2 дюймов до 9 дюймов, а в более типичном случае - от около 3 дюймов до около 8 дюймов, получаемые определенными и/или стандартными приращениями, и каждый из которых имеет одну и ту же длину. Каждый фланец 66 может иметь один и тот же диаметр, так что каждый сообщенный с ним хобот 65 (даже с диаметром другого размера) можно с соблюдением взаимозаменяемости устанавливать на общий кронштейн, например, с помощью замка 166 (Фиг.12C).
На Фиг.8 показано, что система 10 может вмещать имеющие разные размеры желоба 60 продукта и желоба 65 сеток, соответствующие желательному размеру целевого продукта, размеры которых опять обозначены символами A, B и C. Желоба 60, 65 можно крепить к установочному каркасу 10f соответствующими «быстросъемными» кронштейнами, а каркасу 10f и соответствующим установочным кронштейнам можно придать конфигурацию, обеспечивающую прием желобов разных размеров, и при этом не потребуется непомерно длительное время подготовки к работе. Размер желоба 60 продукта в типичном случае является таким же, как диаметр продуктовой камеры 30с в загрузочном желобе (в закрытом состоянии). Продуктовый желоб 60 может быть двустенным желобом с воздушной или гидравлической изоляцией. Желоб 65 для сетки в типичном случае имеет размеры, обеспечивающие его установку поверх продуктового желоба с весьма малым кольцевым пространством зазора. Желоб 65 для сетки имеет конфигурацию, обеспечивающую прием части выгружного конца желоба 60 продукта, и в типичном случае находится около, по меньшей мере, небольшой части участка желоба 60 продукта, так что желоб для сетки и продуктовый желоб выровнены соосно (т.е. имеют по существу общие осевые линии), при этом некоторый участок желоба 60 продукта заключен в желобе 65 для сетки.
На Фиг.10A и 10B показан тормозной модуль (узел) 80. Как показано, тормозной модуль 80 включает первую и вторую пары разнесенных в продольном направлении рычагов 81, 82. Каждый рычаг 81, 82 удерживает множество смежных плоских полимерных захватных элементов 84 (на Фиг.10B показаны четыре элемента 841-844), по меньшей мере, с четырьмя захватными краями 84e, которые образуют многочисленные гребни, а не непрерывную захватную поверхность, что может улучшить захватный контакт с сеткой без нежелательного контакта с желобом 65 для сетки во время работы. Захватные элементы 84 могут быть выполнены из уретанового каучука, имеющего толщину около 1/8 дюйма. Каждый захватный элемент 84 может иметь одну и ту же толщину, либо один или несколько из них могут иметь толщину, которая больше или меньше. Тормозные рычаги 81, 82 содержат разнесенные плоские металлические элементы 85, между которыми четыре захватных элемента 84 заключены таким образом, что, по меньшей мере, два из плоских захватных элементов (842, 843, Фиг.10B) упираются друг в друга. Тормозной модуль можно использовать для устранения складок, торможения, вытягивания сетки в желательных количествах для «заполнения пустот», и т.п. Тормозной модуль имеет такую конфигурацию, что тормозные рычаги 81, 82 перемещаются синхронно, контактируя с сеткой на желобе сетки, а потом перемещаются дальше по ходу на некоторое расстояние перед тем, как отойти от желоба 65, чтобы переместиться назад по ходу, а затем повторить стадии вытягивания и устранения складок сетки. Тормозные рычаги 81, 82 могут иметь программно регулируемые параметры рабочего хода - расстояние, скорость, частоту и т.п., для разных типов сетки, разных требований к продуктам и т.п. Пользователь может модифицировать сетки, но их, как правило, выбирают на основании меню, где указаны параметры, специфичные для продуктов, например, рабочие параметры, определяемые предписаниями.
На Фиг.11A, 11B и 12A-E показано, что хобот 65 для сетки может включать скошенный фланец 66, продолжающийся по окружности, который введен в зацепление с замком 166, имеющим верхний и нижний запирающие хомуты 166с, причем нижний запирающий хомут 166с может иметь сегмент 166s с дугообразной кривизной, который обращен вверх, а верхний запирающий хомут 166c может иметь сегмент 166s с дугообразной кривизной, который обращен вниз, причем соответствующие кривизны соответствуют параметрам формы или кривизны соответственной части скошенного фланца 66. Как показано на Фиг.12B, запирающие хомуты 166c могут иметь дугообразный сегмент, который соответствует углу α, находящемуся в диапазоне приблизительно от 10 до 45 градусов, линии, проведенной через центр трубы 65 желоба для сетки, которая сходится в скошенный фланец 66.
При эксплуатации, оператор может легко выровнять хобот 65 с замком 66, потому что нет необходимости поворачивать хобот 65, чтобы выровнять отверстия с конкретным (выступающим) патрубком. Как показано на Фиг.12A-12D, хобот 65 можно относительно просто позиционировать путем ориентации хобота 65 горизонтально и размещения его между верхним и нижним запирающими хомутами 166c. Для затяжки обоих запирающих хомутов 166с у скошенного фланца 66, чтобы запереть хобот в положении, можно воспользоваться рукояткой 168. Это обеспечивает быструю и простую загрузку и перегрузку желобов сеток с находящимися на них сетками, складки которых расправлены. Хотя иллюстрация приведена с хоботом 65 для сетки, этот замок 166 можно использовать с трубообразными хоботами, желобами или другими трубными (а в частности - цилиндрическими) компонентами, которые желательно высвобождать и заменять во время эксплуатации.
Обращаясь к Фиг.12A и 12B, отмечаем, что каждый из запирающих хомутов 166c может быть поворотно прикреплен посредством поворотного соединения 167 к одной внешней концевой части первого звена 166l. Первое звено 166l можно крепить в шарнире 166p к передней пластине 162 установочной пластины 162 с окном 163. Пластина 162 может быть прикреплена к каркасу 10f системы 10. Продуктовый желоб 60 продолжается через окно 163 и через желоб 65 для сетки, когда тот находится в положении. Второе звено 165l на одном конце прикреплен к первому звену 166l в шарнире 167, а на другом конце - в рукоятке 168. Второе звено 165l может включать удлинитель 165e. Как показано, пластина 162 может включать щелевое отверстие 162s, а рукоятка 168 может включать концевую часть, которая выдвигается и отводится за счет скольжения в щелевом отверстии 162s. При эксплуатации, оператор (или привод) может обеспечивать скольжение рукоятки 168 вперед в щелевом отверстии 162s для поворота звеньев 166l вверх и вниз, соответственно, принудительно перемещая запирающие хомуты 166c к скошенному фланцу 66 (Фиг.12B). Чтобы снять захват, оператор (или привод) может оттягивать рукоятку 168 вбок (например, по существу перпендикулярно центральной линии желоба 65, проходящей вдоль оси), тем самым поворачивая верхнее и нижнее звено 166l вниз, чтобы отпереть замок 166 с хоботом 65.
В некоторых вариантах выполнения, конец звеньев 166l, противоположный шарниру 167, может быть уловлен в держателе 166e, что позволяет перемещать этот конец вверх и вниз на относительно небольшое расстояние в ответ на поворот звена 166l посредством шарнира 167.
Замок 166 можно использовать для закрепления хоботов 65 разного диаметра в положении. В некоторых вариантах выполнения, хоботы 65 сеток воплощены в разных диаметрах трубы, причем все они имеют фланец 66 по существу одного и того же размера, а замок 166 может удерживать все хоботы разных размеров (как правило, в диапазоне приблизительно 2-9 дюймов, а в более типичном случае - в диапазоне приблизительно 3-9 дюймов, как показано, например, на Фиг.9).
На Фиг.12E показано, что скошенный фланец 66 может иметь такую конфигурацию, в которой его торец (обращенный к загрузочному желобу 30) имеет аксиально продолжающуюся первую часть 66f с отрезком, имеющим поверхность постоянного диаметра, которая сходится в скошенный край 66b. Скошенный край 66b может сужаться внутрь в направлении по ходу после первой, большей части, имеющей окружность, которая больше, чем плоская часть 66f. Запирающий хомут 166c может иметь конфигурацию, которая окажется сопрягаемой с скошенным фланцем 66f. Первой части 66f хобота можно придать размер, позволяющий ей находиться в окне 163.
На Фиг.13-17 показан клипсаторный модуль или кожух 90 с клипсатором 190 и зажимными барабанами 191. Подходящим клипсатором является клипсатор Z4 от фирмы Tipper Tie, Inc. Горизонтально ориентированные зажимные барабаны могут удерживать клипсы Z401 или Z411 от фирмы Tipper Tie, Inc., Апекс, штат Новая Каролина, США. Кожух 90 клипсатора может включать выгружной стол 99. Модуль 90 клипсатора может включать петлеватель 170, который может вертикально подавать нити заранее изготовленных петель. Как известно специалистам в данной области техники, петлеватели подают петли в некоторое место вблизи окна для клипс клипсатора, чтобы крепить их по одному на каждой упаковке, на которую накладывают клипсы, обеспечивая тем самым подвеску или удержание упаковки посредством петли после упаковывания.
На Фиг.15A-15D показан узел 195 зажимов с зажимами 195a, 195b и привод 199, удерживаемый выступающим наружу кронштейном 198. Как хорошо известно специалистам в данной области техники, зажимы 195a, 195b связаны с клипсаторным механизмом. Зажимы помогают и собирать оболочечный или покрывающий материал, и «образовывать в нем полости» перед нанесением клипс. Как хорошо известно специалистам в данной области техники, механизм образования полостей может включать пару разнесенных задвижек, которые могут смыкаться и размыкаться, причем каждая из них снабжена окном, которое сходится на покрывающем материале, поддерживаемом в упомянутом механизме под натяжением, вытесняя излишний продукт из области или объема, где накладываются клипсы, что тоже хорошо известно специалистам в данной области техники. Механизм зажимов или механизм образования полостей может способствовать получению более тугой упаковки с нанесенными на нее зажимами.
Привод 199 зажимов связан с зажимами 195a, 195b и осуществляет их смыкание и размыкание. Как показано на Фиг.15A-15D, привод 199 зажимов имеет установочный корпус 199b, прикрепленный к торцевой части механизма, который удерживается кронштейном 198, обеспечивая перемещение привода 199 зажимов в одно из множества разных заданных боковых положений таким образом, что зажимы 195a, 195b имеют разные исходные положения в соответствии с желательным размером целевого продукта. Вследствие этого, узел 199 зажимов имеет меньший рабочий ход для продуктов меньшего размера (Фиг.15D) и больший рабочий ход (Фиг.15C) для продуктов большего размера. Держатель (держатели) 196 продукта, как правило, всегда полностью открыт (открыты), а их закрытое положение можно регулировать для наилучшего поддержания размера продукта в процессе производства. На Фиг.15B показано возможное положение привода 199 для большего продукта (например, продукта диаметром 203,2 мм (8 дюймов)), а на Фиг.15D показано положение привода 199 в кронштейне 198 применительно к меньшему продукту (например, продукту диаметром 88,9 мм (3,5 дюйма)).
Как показано на Фиг.16, кронштейн bracket 198 отстоит от верхней и нижней пластин 198t, 198b, соответственно, причем каждая из них снабжена парой отверстий 198a, выровненных на верхней и нижней пластинах. Установочный корпус 199b привода имеет продолжающиеся вниз сквозные каналы 199ch, которые выровнены с парой отверстий 198а на верхней и нижней пластинах 198t, 198b. Кронштейн 198 содержит продолжающуюся вверх рукоятку 198h с выступающими вниз зубцами или пальцами 198f, которые проходят через отверстия 198a в верхней пластине и в соответствующие выровненные каналы 199ch в установочном корпусе 199b, которые позволяют пользователю удалять рукоятку 198h, перемещать установочный корпус 199b в желаемое боковое положение, а затем закрепить рукоятку 198h с помощью зубцов 198f, пропуская их через верхнюю пластину 198t, каналы 199ch и отверстия в нижней пластине 198b для высвобождаемого запирания привода 199 в положении. Корпус 199b может иметь каналы с глухим концом, которые принимают зубцы рукоятки с направленными вниз зубцами, вводимыми в зацепление с отверстиями 198a нижней пластины. Для обеспечения регулирования поперечного положения привода 199 можно использовать и другие установочные конфигурации.
При эксплуатации, куски продукта, которые могут быть заранее разложены на боковом столе 37, оператор может затем вручную класть в загрузочный желоб 30. В альтернативном варианте, можно также воспользоваться автоматической подачей (не показана). Узел 20 для толкания продукта может линейно отводить и выдвигать толкающую головку, чтобы выталкивать продукт по желобу 60 продукта таким образом, что продукт окажется заключенным в сетку, а затем - расположенным в окрестности клипсатора 90. Потом головка для толкания продукта отводится в нерабочее - «исходное»-положение выше по ходу от загрузочного желоба 30. Когда продукт покидает продуктовый желоб 60, он обертывается или заключается в покрывающий материал, поскольку этот покрывающий материал оттягивают вниз по ходу. Потом срабатывает клипсатор, так что можно накладывать клипсы на покрывающий материал, заваривать его, заплавлять, завязывать или иным способом заделывать и/или герметизировать в частях его переднего и заднего краев.
Как описано выше, вокруг наружной поверхности желоба 65 для сетки можно располагать рукав из покрывающего материала (обозначенный позицией 65n на Фиг.10B), имеющий конфигурацию, позволяющую тянуть его вниз по ходу, чтобы автоматически заключить в него продукт, когда продукт выходит из выгружного конца продуктового желоба. Вместо размещения рукава из оболочечного материала на желобе сетки, можно также - если это желательно - использовать дополнительный держатель материала рукава (не показано). Дополнительный держатель рукава может иметь такую конфигурацию, что будет окружать находящуюся дальше по ходу часть продуктового желоба.
В некоторых вариантах выполнения, желоба 60, 65 могут - по выбору - включать сменные манжеты и/или вкладыши на стыке двух желобов, чтобы обеспечить ремонт вследствие износа, который может происходить в течение длительных периодов эксплуатации из-за поворота и позиционирования желобов, исходя из конфигураций загрузки и выгрузки (не показаны).
На Фиг.17 показана схема 200, которую можно использовать вместе с системой 10 и/или ее частями. Как показано, схема 200 включает контроллер 18 (причем возможно наличие более одного контроллера и дистанционное управление им или оперативный контроль его через Internet или другую локальную глобальную сеть). Контроллер 18 осуществляет связь с разными приводами 40, 50a, 130a и датчиками 131, 20s для управления работой конструктивных элементов, что может способствовать достижению безопасной работы и/или скорости.
На Фиг.18-20 представлены блок-схемы последовательностей возможных операций, которые можно проводить посредством вариантов изобретения. На Фиг.18 показаны возможные стадии способа загрузки целевого продукта для упаковывания. Способ заключается в том, что: вертикально перемещают пол загрузочного желоба вниз из рабочего положения (блок 210); загружают целевой продукт в загрузочный желоб, когда, по меньшей мере, часть потолка продуктового желоба открыта (блок 220); закрывают потолок загрузочного желоба (блок 225); затем программно предписывают полу загрузочного желоба двигаться вверх для смыкания с потолком и образования по существу цилиндрической продуктовой камеры (блок 230); и сжимают целевой продукт, удерживаемый в продуктовой камере, в ответ на предписание полу двигаться вверх (блок 235). По выбору, способ может также предусматривать, что после стадии сжатия: выталкивают сжатый целевой продукт через загрузочный желоб и расположенный по ходу после него продуктовый желоб, выровненный с загрузочным желобом (блок 240); стаскивают сетчатый материал с внешней поверхности желоба для сетки, охватывающего продуктовый желоб, для автоматического заключения сжатого целевого продукта в сетчатый материал, когда объект покидает продуктовый желоб (блок 245); и накладывают, по меньшей мере, один зажим на сетчатый материал, закрепляя объект в сетчатом материале (блок 250).
На Фиг.19 показаны возможные операции или стадии другого способа загрузки целевого продукта для упаковывания. Эти стадии заключаются в том, что: вертикально выдвигают выступающие вверх боковые стенки, прикрепленные к потолку загрузочного желоба, из рабочего положения (блок 300); загружают целевой продукт в загрузочный желоб при открытом потолке продуктового желоба и выдвинутых боковых стенках (блок 305); закрывают потолок загрузочного желоба (блок 310); затем автоматически вертикально перемещают боковые стенки и потолок загрузочного желоба вниз к полу, чтобы ограничить по существу цилиндрическую продуктовую камеру (блок 315); и сжимают целевой продукт, удерживаемый в продуктовой камере, в ответ на вертикальное перемещение потолка вниз (блок 320).
По выбору, способ может также предусматривать, что: выталкивают сжатый целевой продукт через загрузочный желоб и расположенный по ходу после него продуктовый желоб, выровненный с загрузочным желобом; стаскивают сетчатый материал с внешней поверхности желоба для сетки, охватывающего продуктовый желоб, для автоматического заключения сжатого целевого продукта в сетчатый материал, когда объект покидает продуктовый желоб; и накладывают, по меньшей мере, один зажим на сетчатый материал, закрепляя объект в сетчатом материале.
Фиг.20 иллюстрирует возможные стадии способов загрузки отдельных кусков цельной мышечной ткани в загрузочной системе. Эти стадии могут заключаться в том, что: обеспечивают загрузочный желоб, имеющий продуктовую камеру с потолком и полом, совершающим вертикальное перемещение (блок 350); перемещают пол в направлении вниз в загрузочное положение (блок 355); поворачивают потолок загрузочного желоба в открытое положение (блок 360); загружают цельную мышечную ткань в продуктовую камеру загрузочного желоба, когда потолок открыт (блок 365); закрывают потолок (блок 370); осуществляют электронное запирание закрытого потолка (блок 375); затем автоматически перемещают пол вверх к потолку для сжатия цельной мышечной ткани в продуктовой камере (блок 380); а затем автоматически выдвигают механизм для толкания продукта с толкающей головкой для выталкивания сжатой цельной мышечной ткани из продуктовой камеры (блок 385).
Предлагаемые процессы и/или способы могут предусматривать ручные операции (подачу электропитания в систему, смыкание щитков кожуха, включение источника воздуха), которые не проиллюстрированы. Многие из этих операций можно проводить под управлением программируемого логического контроллера (ПЛК). То есть контроллер или процессор 18 (такой как программируемый логический контроллер) может иметь конфигурацию, обеспечивающую автоматический оперативный контроль рабочего состояния и рабочих условий посредством модуля схемы защиты.
Фиг.21 показывает, что система 10 может включать встроенные в автоматическую линию первый и второй (сдвоенные) предохранительные клапаны 90, 91, сообщающиеся с источником 93 сжатого воздуха и защитной схемой 70с оперативного контроля, обменивающейся информацией с контроллером, связанным с интерфейсом управления концентратором (ИУК) и/или ПЛК. Система 10 может иметь конфигурацию, обеспечивающую оперативный контроль обоих клапанов 91, 93 и операцию отсечки либо отключения системы, если один из клапанов 91, 93 выходит из строя.
Чтобы вкратце изложить некоторые варианты выполнения, отмечаем, что система устанавливает задвижку 75 между толкающей головкой 20h и желобом 30 до того, как оператор получает возможность открыть загрузочную дверцу 31. Сразу же после ее открывания, оператор загружает отдельные куски цельной мышечной ткани (или другого продукта) в загрузочный желоб 30, а потом закрывает дверцу 31. Система автоматически закрывает и запирает дверцу 31, отводит задвижку 75 и инициирует цикл выталкивания. Толкающая головка 20h выталкивает цельную мышечную ткань из желоба 35 в сетку. Клипсатор 50 накладывает клипсы, когда толкающую головку отводят. Как только толкающая головка освобождает желоб 30, заслонку выдвигают, а дверцу 31 отпирают и открывают, и все оказывается готовым к тому, чтобы оператор снова загрузил следующий набор кусков мяса цельной мышечной ткани в образовавшуюся полость.
На Фиг.21 представлена блок-схема возможных вариантов выполнения систем обработки данных, показывающая системы, способы и компьютерные программные продукты в соответствии с вариантами изобретения. Системы обработки данных могут быть встроены в программируемый логический контроллер и/или цифровой процессор сигналов в сообщении с ИУК. Процессор 410 осуществляет связь с запоминающим устройством 414 через шину 448 адреса и/или данных. Процессор 410 может быть микропроцессором, выпускаемым серийно или выполненным по специальному заказу. Запоминающее устройство 414 является представителем всей иерархии запоминающих устройств, включающих программные средства и данные, используемые для воплощения функциональных возможностей системы обработки данных. Запоминающее устройство 414 может включать - но не в ограничительном смысле - устройства следующих типов: кэш, постоянное запоминающее устройство (ПЗУ), программируемое ПЗУ (ППЗУ), стираемое ППЗУ (СПЗУ), электрически стираемое ППЗУ (ЭСППЗУ), флэш-память, статическое оперативное запоминающее устройство (СОЗУ) и динамическое оперативное запоминающее устройство (ДОЗУ).
Как показано на Фиг.21, запоминающее устройство 414 может включать программные средства и данные нескольких категорий, используемые в системе обработки данных: операционную систему 452; прикладные программы 454; драйверы 458 устройств ввода-вывода (УВВ); модуль 440 управления приводом вертикального перемещения, который может быть связан с данными 456. Модуль 440 управления приводом вертикального перемещения может иметь конфигурацию, обеспечивающую введение в зацепление с ограничителем вертикального перемещения (позиция 145 на Фиг.7B), когда используется загрузочный желоб меньшего размера, и предписание полу (и/или потолку) двигаться синхронно с отводом механизма для толкания продукта, введением в зацепление блокирующего элемента 50, и т.п. Модуль 440 может автоматически и управляемо предписывать отвод и перемещение полу (и/или потолку) загрузочного желоба.
Данные 456 могут включать таблицу данных о разных продуктах (например, меню рабочих параметров, вызываемое «по рецептуре»), о покрывающем материале, обратной связи с помощью датчика приближения, размере полости (т.е. о вертикальном перемещении), о данных давления, защитных схемах блокировки и т.п., соответствующей конкретным или целевым продуктам одного или более производителей, а эта информация может обеспечить дополнительную силу для отрезания собранного материала и/или дополнительное сокращение времени до желательного цикла для рабочей смены и/или рабочего прогона и т.п. Как будет ясно специалистам в данной области техники, операционная система 452 может быть любой операционной системой, пригодной для использования с системой обработки данных, такой как: OS/2, AIX, DOS, OS/390 или System390 от International Business Machines Corporation, Армонк, штат Нью-Йорк, США; Windows CE, Windows NT, Windows95, Windows98 или Windows2000 от Microsoft Corporation, Редмонт, штат Вашингтон, США; Unix или Linux или FreeBSD, Palm OS от Palm, Inc.; Mac OS от Apple Computer; LabView, или иные запатентованные операционные системы. Драйверы 458 УВВ, как правило, включают стандартные программы программных средств, доступные через операционную систему 452 с помощью прикладных программ 454 для связи с такими устройствами, как порт (порты) данных ввода-вывода, компоненты запоминающего устройства 456 для данных и некоторого запоминающего устройства 414. Прикладные программы 454 являются иллюстрациями программ, которые воплощают различные особенности конструкции системы обработки данных и могут включать, по меньшей мере, одно приложение, которое поддерживает операции в соответствии с вариантами изобретения. И, наконец, данные 456 представляют собой статические и динамические данные, используемые прикладными программами 454, операционной системой, драйверами 458 УВВ и другими программами программных средств, которые могут находиться в запоминающем устройстве 414.
Хотя данное изобретение описано, например, со ссылками на модуль 440, являющийся на Фиг.21 прикладной программой, специалистам в данной области техники будет ясно, что также можно воспользоваться другими выполнением и, сохраняя выгоды, вытекающие из положений данного изобретения. Например, модуль 440 также может быть встроен в операционную систему, драйверы 458 УВВ или другое такое локальное отделение системы обработки данных. Таким образом, не следует считать данное изобретение ограничиваемым выполнением и согласно Фиг.21, т.к. этот чертеж нужно рассматривать как охватывающий любую конфигурацию, способную обеспечить проведение описываемых здесь операций. Кроме того, модуль 440 можно использовать для работы других устройств, в которых возможно применение других желобов при наличии или отсутствии автоматических толкающих механизмов.
Порт данных ввода-вывода можно использовать для передачи информации, обмен которой происходит между системой обработки данных, механизмом для толкания продукта и клипсатором, в другую компьютерную систему ил сеть (например, Internet), либо в другие устройства, управляемые процессором. Эти компоненты могут быть обычными компонентами, такими, как те, которые используются во многих традиционных системах обработки данных, которым можно придать конфигурацию в соответствии с данным изобретением для выполнения описываемой здесь работы.
Модуль 440 может иметь конфигурацию, обеспечивающую оперативный контроль, по меньшей мере, одного сигнала из загрузочного желоба, имеющего продуктовую камеру с потолком и полом, по меньшей мере, один из которых совершает вертикальное перемещение, обеспечивая упрощенную загрузку продукта в продуктовую камеру, когда потолок открыт, и автоматическое предписание приводу переместить, по меньшей мере, один из потолка или пола вертикально в рабочее положение после того, как данные сигнала подтверждают, что потолок закрыт.
Модуль 440 может иметь конфигурацию, обеспечивающую предписание приводу переместить пол вертикально вниз в рабочее положение после того, как данные сигнала подтверждают, что механизм для толкания продукта отведен из загрузочной камеры. Модуль 440 может осуществлять связь с другим модулем (или может сам иметь конфигурацию, предназначенную) для автоматического запирания и отпирания замка, оперативно связанного с потолком в закрытой конфигурации, путем предписания замку войти в зацепление до вертикального перемещения пола вверх, предписания отвода блокирующего щитка для обеспечения входа для толкания продукта в загрузочный желоб, с последующим предписанием отпирания замка после того, как пол переместится вниз для создания загрузочной конфигурации, дающей пользователю возможность открывать потолок для загрузки после отвода для толкания продукта и выдвижения блокирующего щитка.
Хотя данное изобретение описано, например, со ссылкой на конкретные разделения программ, функций и запоминающих устройств, не следует считать данное изобретение ограничиваемым такими логическими разделениями. Таким образом, следует считать данное изобретение не ограничиваемым конфигурацией согласно Фиг.21, а охватывающим любую конфигурацию, способную обеспечить проведение описываемых здесь операций.
Блок-схемы последовательностей операций и блок-схемы системы согласно некоторым из упоминаемых здесь чертежей показывают архитектуру, функциональные возможности и работу согласно возможным воплощениям систем защиты и/или диагностики в соответствии с данным изобретением. В этой связи отметим, что каждый блок в блок-схемах последовательностей операций или блок-схемах системы отображает модуль, сегмент или часть кода, который (которая) содержит одну или более исполняемых команд для воплощения заданной логической функции (заданных логических функций). Следует также отметить, что в некоторых альтернативных воплощениях, функции, отмеченные в блоках, можно выполнять не в том порядке, который отмечен на чертежах. Например, два блока, показанные последовательно, на самом деле можно исполнять по существу одновременно, или эти блоки иногда можно исполнять в обратном порядке, в зависимости от тех функциональных возможностей, о которых идет речь.
Вышеизложенное служит для иллюстрации данного изобретения, но не для образования его объема. Хотя описаны несколько возможных вариантов выполнения изобретения, специалисту в данной области будет понятно, что без отхода от положений и преимуществ данного изобретения, которые придают ему новизну, в возможные вариантах выполнения легко внести множество изменений. Соответственно, все эти изменения следует считать входящими в объем формулы изобретения. В тех местах формулы изобретения, где употребляются фразы, построенные по принципу «средство плюс функция», их следует считать охватывающими описанные здесь конструкции как выполняющие указанную функцию и охватывающими не только конструктивные эквиваленты, но и эквивалентные конструкции. Поэтому должно быть ясно, что вышеизложенное носит иллюстративный характер, и не образует изобретение описанными конкретными вариантами, и что в объеме прилагаемой формулы изобретения располагаются изменения, которые могут быть внесены в описанные, а также другие варианты выполнения. Объем изобретения определен в прилагаемой формуле изобретения, которая также включает эквиваленты признаков, указанных в ней.
Реферат
Загрузочный желоб для упаковочной системы содержит потолок, имеющий, по меньшей мере, часть, выполненную с возможностью открывания и закрывания, и пол. В закрытом положении потолок и пол образуют продуктовую камеру с открытым каналом между ними. При этом, по меньшей мере, пол или потолок совершают возвратно-поступательное перемещение в вертикальном направлении между первым открытым загрузочным положением и вторым - в котором потолок закрыт. Упаковочная система содержит каркас, загрузочный желоб, пол которого выполнен с возможностью вертикального возвратно-поступательного перемещения, и удлиненный желоб для сетки, связанный с загрузочным желобом. Система содержит также удлиненный продуктовый желоб, прикрепленный к каркасу. Желоб находится, по меньшей мере, частично во внутренней полости желоба для сетки, причем в рабочем положении продуктовый желоб выровнен по оси с загрузочным желобом и находится по ходу после него. За желобом для сетки расположен клипсаторный механизм для нанесения по меньшей мере одной клипсы на сетчатый материал с продуктом. Способ загрузки продукта для упаковывания содержит вертикальное перемещение пола загрузочного желоба вниз из рабочего положения, загрузку продукта в загрузочный желоб при открытом потолке продуктового желоба, закрывание потолка загрузочного желоба. Затем программное перемещение пола вверх для смыкания с потолком и сжатие продукта. По другому варианту способ загрузки целевого продукта содержит вертикальное выдвижение выступающих вверх боковых стенок, прикрепленных к потолку загрузочного желоба, из рабочего положения, загрузку продукта в загрузочный желоб
Формула
потолок, имеющий, по меньшей мере, часть, выполненную с возможностью открывания и закрывания; и
нижележащий пол, выровненный с потолком, так что в закрытом рабочем положении потолок и пол образуют продуктовую камеру с аксиально продолжающимся открытым каналом между ними,
при этом, по меньшей мере, один из пола и потолка совершает возвратно-поступательное перемещение в по существу вертикальном направлении между первым загрузочным положением, в котором, по меньшей мере, часть потолка открыта, и вторым рабочим положением, в котором потолок закрыт, образуя продолжающийся аксиально открытый канал.
программно управляемый замок для запирания закрытого потолка;
датчик в сообщении с потолком для обнаружения закрытия потолка; и
контроллер в сообщении с датчиком, замком и приводом, причем контроллер способен автоматически сигнализировать приводу, чтобы пол был поднят в рабочее положение, когда потолок закрыт и заперт, и чтобы пол был отведен в загрузочное положение перед автоматическим отпиранием замка потолка.
каркас;
загрузочный желоб, прикрепленный к каркасу, причем загрузочный желоб имеет продуктовую камеру с полом, выполненным с возможностью вертикального возвратно-поступательного перемещения;
удлиненный желоб для сетки, связанный с загрузочным желобом, прикрепленным к каркасу, причем желоб для сетки имеет внешнюю поверхность и противоположные принимающую и выгружную концевые части с продолжающейся через него внутренней полостью, при этом желоб для сетки имеет осевую центральную линию;
удлиненный продуктовый желоб, прикрепленный к каркасу, причем продуктовый желоб имеет противоположные принимающий и выгружной концы, при этом продуктовый желоб находится, по меньшей мере, частично во внутренней полости желоба для сетки, причем в рабочем положении продуктовый желоб выровнен по оси с загрузочным желобом и находится по ходу после него; и
клипсаторный механизм, расположенный по ходу после желоба для сетки и выровненный с ним с возможностью взаимодействия, причем клипсаторный механизм выполнен для нанесения по меньшей мере одной клипсы на сетчатый материал, в котором заключен продукт после того, как этот продукт покидает продуктовый желоб.
коллагеновую пищевую пленку, образующую манжету в сообщении с валиком, удерживающим рулон коллагеновой пленки, прикрепленный к каркасу по ходу после загрузочного желоба в сообщении с продуктовым желобом, причем коллагеновой пленке придается трубчатая форма и ее тянут через продуктовый желоб и желоб для сетки, так что она расположена между продуктом и сеткой, когда продукт покидает продуктовый желоб;
и механизм для толкания продукта с толкающей головкой, выровненной с загрузочным желобом и продуктовым желобом, причем механизму для толкания продукта придано такое выполнение, что этот механизм имеет цикл выталкивания продукта, обеспечивающий автоматическое возвратно-поступательное перемещение в загрузочный желоб и продуктовый желоб и обуславливаемое этим перемещение продукта через загрузочный желоб, а затем через выгружную концевую часть продуктового желоба и из него наружу.
вертикальное перемещение пола загрузочного желоба вниз из рабочего положения;
загрузку целевого продукта в загрузочный желоб при открытом потолке продуктового желоба;
закрывание потолка загрузочного желоба; затем
программное перемещение пола загрузочного желоба вверх для смыкания с потолком и образования по существу цилиндрической продуктовой камеры; и
сжатие целевого продукта, удерживаемого в продуктовой камере, в ответ на перемещение пола вверх.
толкание сжатого целевого продукта через загрузочный желоб и расположенный по ходу после него продуктовый желоб, выровненный с загрузочным желобом;
вытягивание сетчатого материала с внешней поверхности желоба для сетки, охватывающего продуктовый желоб, для автоматического заключения сжатого целевого продукта в сетчатый материал, когда объект покидает продуктовый желоб; и
наложение по меньшей мере одного зажима на сетчатый материал, закрепляя объект в сетчатом материале.
вертикальное выдвижение выступающих вверх боковых стенок, прикрепленных к потолку загрузочного желоба, из рабочего положения;
загрузку целевого продукта в загрузочный желоб при открытом потолке продуктового желоба и выдвинутых боковых стенках;
закрывание потолка загрузочного желоба; затем
автоматическое вертикальное перемещение боковых стенок и потолка загрузочного желоба вниз к полу для образования по существу цилиндрической продуктовой камеры; и
сжатие целевого продукта, удерживаемого в продуктовой камере, в ответ на вертикальное перемещение потолка вниз.
толкание сжатого целевого продукта через загрузочный желоб и расположенный по ходу после него продуктовый желоб, выровненный с загрузочным желобом;
вытягивание сетчатого материала с внешней поверхности желоба для сетки, охватывающего продуктовый желоб, для автоматического заключения сжатого целевого продукта в сетчатый материал, когда объект покидает продуктовый желоб; и
наложение по меньшей мере одного зажима на сетчатый материал, закрепляя объект в сетчатом материале.
машиночитаемый носитель информации, имеющий машиночитаемый программный код, обеспеченный в указанном носителе, при этом машиночитаемый программный код включает:
машиночитаемый программный код, который оперативно контролирует, по меньшей мере, один сигнал из загрузочного желоба, имеющего продуктовую камеру с потолком и полом, по меньшей мере, один из которых совершает вертикальное перемещение, обеспечивая упрощенную загрузку продукта в продуктовую камеру, когда потолок открыт; и
машиночитаемый программный код, который автоматически предписывает приводу переместить, по меньшей мере, один из потолка или пола вертикально в рабочее положение после того, как данные сигнала подтверждают, что потолок закрыт.
машиночитаемый программный код, который автоматически предписывает приводу переместить пол вертикально вниз в загрузочное положение после того, как данные сигнала подтверждают, что механизм для толкания продукта отведен из загрузочной камеры; и
машиночитаемый программный код, который автоматически запирает и отпирает замок, оперативно связанный с потолком в закрытой конфигурации, причем этот машиночитаемый программный код предписывает замку войти в зацепление до вертикального перемещения пола вверх, предписывает отвод блокирующего щитка для обеспечения входа для толкания продукта в загрузочный желоб, а затем предписывает отпирание замка после того, как пол переместится вниз для создания загрузочной конфигурации, дающей пользователю возможность открывать потолок для загрузки после отвода для толкания продукта и выдвижения блокирующего щитка.
Комментарии