Способ определения сортности мяса без его повреждения и устройство для его осуществления (варианты) - RU2066450C1
Код документа: RU2066450C1
Чертежи



















Описание
Изобретение относится к ультразвуковому способу и к устройствам для определения толщины жира и площади длиннейшей мышцы,так называемого глазка домашнего животного и/или туши, не повреждающему продукт.
В мясной промышленности основным фактором для определения стоимости туши забитого животного является содержание постного мяса в туше. Разработаны разнообразные способы определения сорта или качественной оценки туши животного. Известны разнообразные способы и устройства, представляющие некоторую часть такой информации.
После забоя мясного животного, подобного корове или свинье, оно должно быть классифицировано по содержанию постного мяса и/или качеству оценщиком, который оценивает каждую тушу отдельно. В настоящее время сортирование обычно выполняется визуально. Поскольку сорт, присвоенный туше, определяет стоимость фунта этой туши, то сортирование имеет огромное экономическое значение. Также известно, что незначительные вариации сортирования могут значительно влиять на сумму, получаемую за тушу.
Способ и устройство для ультразвукового сортирования туши описан в патенте США N 785 817, выданному Стоуфферу. Способ и устройство по Стоуфферу пpедлагают использование некоторого множества преобразователей для ультразвукового создания видеоизображения, соответствующего поперечному сечению туши животного. Преобразовательная головка устройства Стоуффера содержит линейную матрицу из преобразовательных элементов известным образом, которые крепятся на несущем преобразователи устpойстве обычно в горизонтальном положении. Изображение, которое создает устройство Стоуффера, обычно является область "глазка" у грудных позвонков крс или у поясничных позвонков свиной туши. (Прим. "глазком" называется округлое поперечное сечение длиннейшей мышцы спины). Стоуффер предложил, что сорт туши можно автоматически определить с помощью компьютера, используя подходящее распознающее образцы устройство, которое передает в компьютер информацию, извлеченную из видео или электронного изображения области "глазка".
Другие ультразвуковые устройства для сортирования живых животных или туш животных описаны в Европейском патенте N 0337661, выданному Вилсу, и патент США N 4 359 055 и N 4 359 056, выданных Карлсону. В патенте Вилсона описано удерживаемое в руке ультразвуковое преобразовательное устройство, которое содержит некоторое множество ультразвуковых преобразователей. Устройством Вилсона предпочтительно сканировать живых животных. Устройства Вилсона и Карлсона позволяют определять толщину кожного и жирового слоев и мышечный слой, прилегающий к жиру. Основным предназначением устройства Карлсона является определение толщины подкожного жира живого животного, в частности кабана или свиньи. Преобразователь устройства Карлсона создает импульсы, которые усиливаются и поступают на пороговый детектор, а затем подсчитываются электронным счетчиком. Коэффициент усиления усилителя изменяется в соответствии с численным показанием счетного устройства, соответствующему моменту обнаружения жирового слоя.
Ни одно из названных выше известных устройств не обеспечивает точного определения площади длиннейшей мышцы животного, как и толщина жира с большой скоростью, то есть настолько быстро оценить тушу, чтобы использоваться на типовой бойне. Поэтому существует потребность в точном, высокоскоростном, работающем с большим объемом устройстве, которое позволяет определять оценку туши, характеризующую сорт, качество и постное содержание туши.
Устройство для получения замеров животной туши, соответствующее одному из аспектов изобретения, содержит ультразвуковое генерирующее (принимающее) импульсы устройство для подачи ультразвуковых импульсных сигналов и приема отраженны ультразвуковых сигналов, причем это устройство создает некоторое множество ультразвуковых сигналов, соответствующее названным принимаемым после отражения ультразвуковым сигналам, приводное устройство, позиционирующее названное генерирующее (принимающее) импульсы устройство вдоль предопределенной траектории с живым животным или тушей, причем названное приводное устройство создает позиционный сигнал, соответствующий относительно позиции названного генерирующего (принимающего) импульсы устройства относительно туши или живого животного, и устройство для анализа названных ультразвуковых сигналов и названного позиционного сигнала для создания замера, соответствующего постному содержанию живого животного или туши.
Способ для получения замеров живого животного или туши, соответствующий другому аспекту изобретения, состоит из следующих шагов: создание ультразвукового устройства, которое контактирует с живым животным или тушей в предопределенных участках и подает и принимает ультразвуковые сигналы, причем ультразвуковой отраженный сигнал соответствует принятым ультразвуковым сигналам, позиционирование названного ультразвукового устройства в контакте с живым животным или тушей в предопределенных участках живого животного или туши, перемещение названного ультразвукового устройства вдоль заранее определенной траектории при сохранении контакта названного ультразвукового устройства с живым животным или тушей, запоминание названного отраженного сигнала для каждой из некоторого множества участков вдоль названной предопределенной траектории для создания набора из запомненных отраженных сигналов, анализирование названного набора запомненных отраженных сигналов для определения на его основе оценки содержания мяса у живого животного или туши.
Одной целью изобретения является создание усовершенствованного способа и усовершенствованного устройства для получения замеров живого животного и/или туши.
Другой целью изобретения является создание более надежных и высокоточных устройства и способа для определения жира /постного содержания живого животного или туши.
Следующей целью изобретения является создание устройства и способа для автоматического сканирования живого животного или туши и замера площади поперечного сечения длиннейшей мышцы и толщины жира, а также автоматического вычисления постного содержания или массы постного мяса по таким замерам.
Следующей целью изобретения является создание полностью автоматизированной, анализирующей живое животное или тушу системы для определения оценки живого животного или туши по жировому/постному содержанию живого животного или туши.
На фиг. 1 схематически представлено
сортирующее
мясо, устройство по изобретению; на фиг. 2 блок-схема, представляющая компоненты контроллера 16, изображенного на фиг. 1;
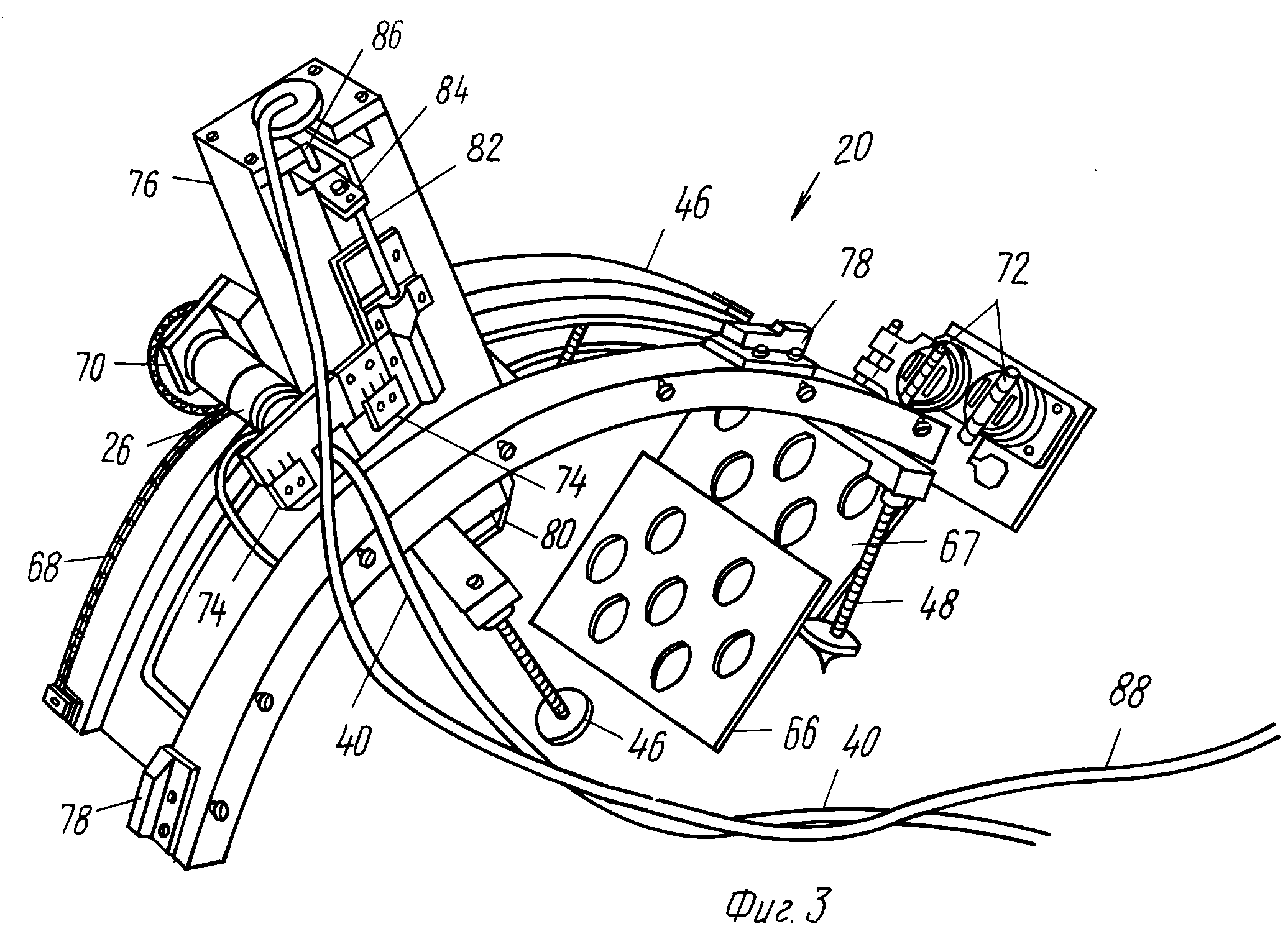
на фиг. 3 вид спереди опоры устройства по изобретению;
на
фиг. 4 вид сзади опоры, изображенной на фиг. 3;
на фиг. 5 поперечное сечение области ("глазка") живого животного или туши, находящейся в непосредственной близости от опоры,
изображенной на
фиг. 3 и фиг. 4;
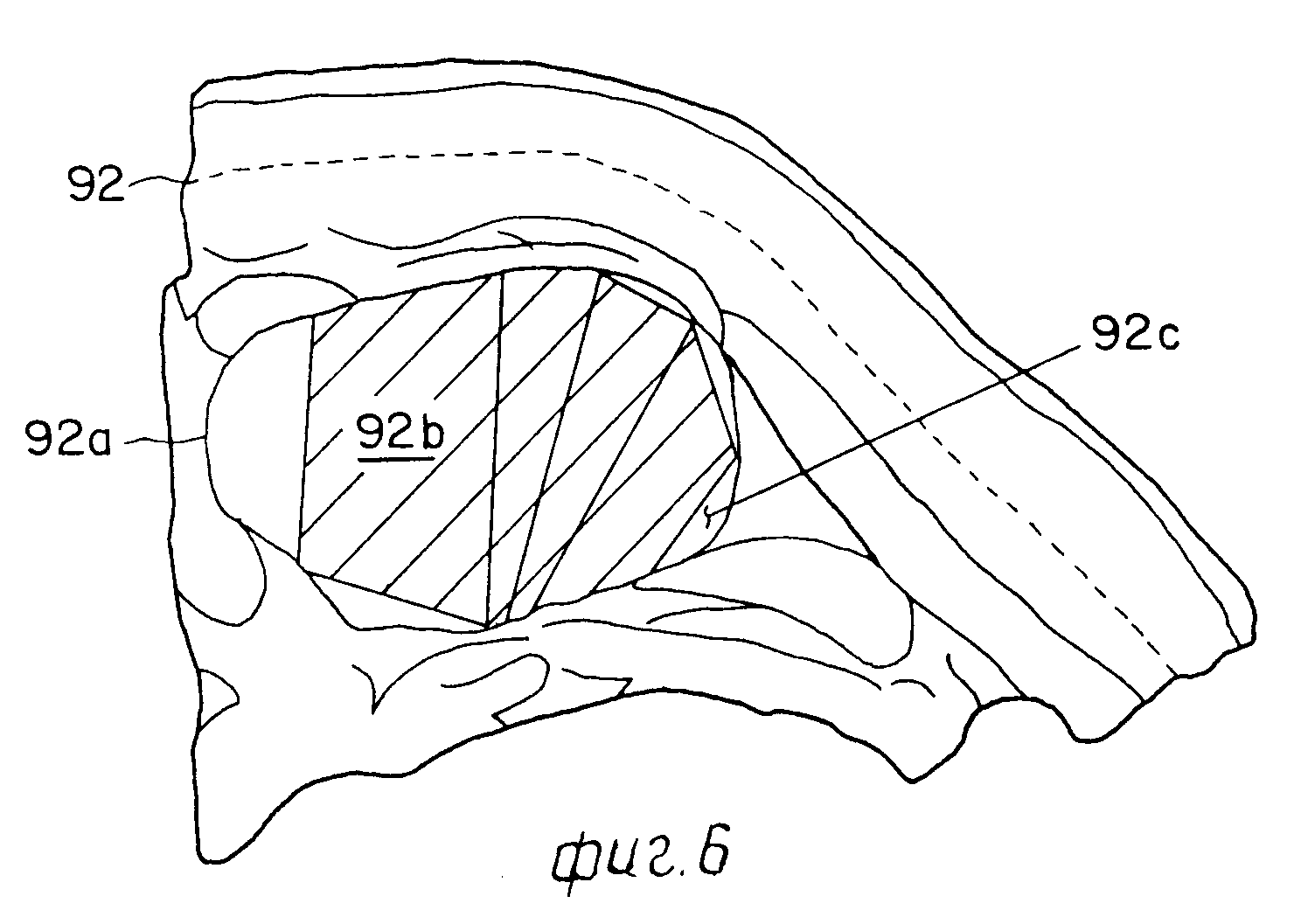
на фиг. 6 поперечное сечение живого животного или туши, показывающее область длиннейшей мышцы, разделенной на три базовые области;
на фиг. 7 плоский
четырехугольник
и информация о геометрических координатах, относящихся к этому четырехугольнику;
на фиг. 8 обобщенная алгоритмическая схема для программы, выполняемой компьютером 14, который
определяет
границы прилегания тканей и исправляет ошибочные данные, собранные при сканировании;
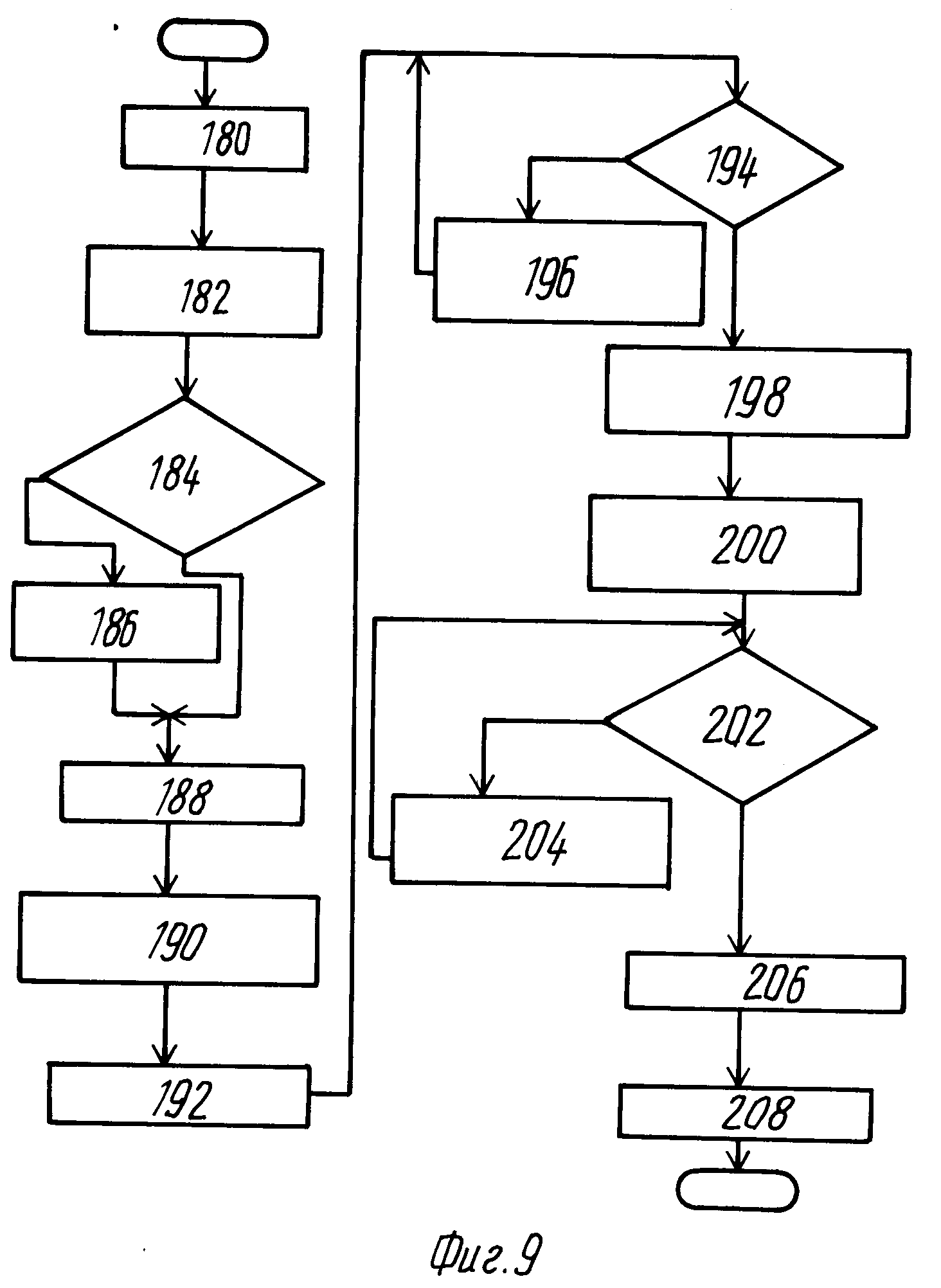
на фиг. 9 детальный алгоритм шага "Считать данные и определить границы прилегания тканей",
представленного
на фиг.8;
на фиг. 10 детальный алгоритм шага "Исправить точки ошибочных данных", представленного на фиг. 8;
на фиг. 11 алгоритм альтернативного варианта
осуществления шага "Считать
данные и определить границы прилегания тканей", представленного на фиг. 8;
на фиг. 12 частичное изображение в увеличенном виде ультразвукового датчика и
резинового колпака, находящихся в
контакте с живым животным или тушей;
на фиг. 13 график, изображенный "полный видео" электронный сигнал, создаваемый устройством 12 на участке, отстоящем на
один дюйм от средней линии свиньи
(живой или забитой);
на фиг. 14 график, изображающий электронный RF сигнал, соответствующий фиг. 13, который создает инструмент 12 на участке, отстоящем на
один дюйм от средней линии свиньи
(живой или забитой);
на фиг. 15 график, изображающий электронный "полностью видео" сигнал, создаваемый устройством 12 на участке, отстоящем на два дюйма от
средней линии свиньи (живой или
забитой);
на фиг. 16 график, изображающий электронный RF сигнал, соответствующий фиг. 15, создаваемый устройством 12 на участке, отстоящем на 2 дюйма от
средней линии свиньи (живой или
забитой);
на фиг. 17 график, изображающий электронный "полностью видео" сигнал, создаваемый устройством 12 на участке, отстоящем на три дюйма от средней линии
свиньи (живой или забитой);
на фиг. 18 график, изображающий электронный RF сигнал, соответствующий фиг. 17, который создает устройство 12 на участке, отстоящем от средней линии свиньи (живой
или забитой) на три дюйма;
на фиг. 19 график, изображающий электронный "полностью видео" сигнал, создаваемый устройством 12 на участке, отстоящем от средней линии свиньи (живой или забитой)
на 4 дюйма;
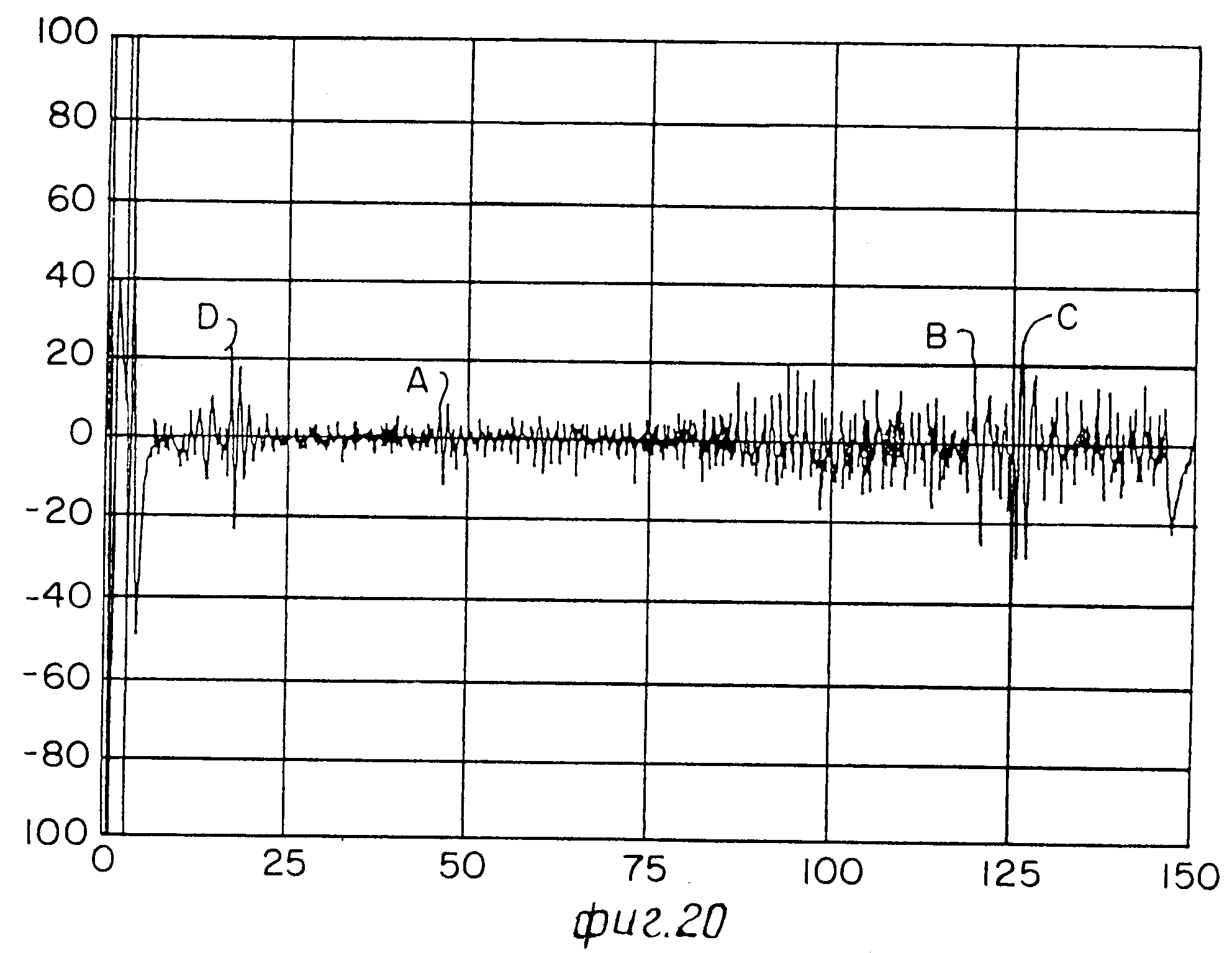
на фиг. 20
график, изображающий электронный сигнал, соответствующий фиг. 19, который создает устройство 12 на участке, отстоящем на три дюйма от средней линии свиньи (живой или
забитой);
на фиг. 21
график, изображающий электронный "полностью видео" сигнал, создаваемый устройством 12 на участке, отстоящем на пять дюймов от средней линии свиньи (живой или забитой);
на фиг. 22 график,
изображающий электронный RF сигнал, соответствующий фиг. 21, который создает устройство 12 на участке, отстоящем на 3 дюйма от средней линии свиньи (живой или забитой);
на фиг. 23 график,
изображающий типичный электронный RF ультразвуковой сигнал, создаваемый устройством 12 для свиньи (живой или забитой), имеющей третий жировой слой;
на фиг. 24
график, изображающий типичный
электронный RF ультразвуковой сигнал, создаваемый устройством 12 для коровы (живой или забитой).
С целью облегчения понимания принципов изобретения ниже будут делаться ссылки на предпочтительный вариант осуществления, проиллюстрированный приложенными фигурами, и будет использоваться специфическая терминология. Однако следует понимать, что это не предполагает ограничений объему изобретения, а также подразумеваются изменения и модификации проиллюстрированного устройства и дополнительные приложения принципов изобретения, какие могут быть сделаны специалистом в области техники, к которой относится настоящее изобретение.
На фиг. 1 представлена схематичная иллюстрация непроникающего сортирующего мясо устройства 10, соответствующего изобретению. Сортирующее мясо устройство 10 включает в себя ультразвуковое, собирающее данные устройства 12, персональный компьютер 14, контроллер 16, дистанционного управления операторский пульт или подвесную станцию 18 и опору 20. Ультразвуковой преобразователь (изображенный на рис. 3) соединен с устройством 12 через посредством сигнального тракта или многожильного кабеля 22. Двигатель 26 принимает сигналы управления от контроллера 16 по многожильному сигнальному тракту 24. Аналогично сигналы предельных выключателей, сигналы дифференциального трансформатора линейного напряжения и сигналы шифратора идут по сигнальному тракту 28, которым является многожильный кабель. Предельные выключатели, дифференциальный транспортер линейного напряжения и шифратор изображены на рис. 3 и/или 4. IEEE 488 или GPIB интерфейс 30 обеспечивает поток данных между устройством 12 и компьютером 14. Параллельного интерфейса шина 32 объединяет контроллер 16 и компьютер 14. На рисунке изображен последовательный интерфейс 34 между компьютером 14 и контроллером 16, которым обычно выбирают последовательный интерфейс PS 232. Триггерный сигнал поступает от контроллера 16 на устройство 12 по сигнальному тракту 35.
Опора 20 располагается так, что живое животное (не изображено) или туша (не изображена) может быть помещена в непосредственной близости ультразвукового преобразователя 36. Резиновый колпак, закрепленный поверх преобразователя 36, образует камеру для жидкости, в которую заливается вода или другой подходящий соединитель, обеспечивающий надлежащую или достаточную ультразвуковую связь между преобразователем 36 и живым животным или тушей. Соединитель поступает в камеру, образованную колпаком 38, по шлангу 40. Соединитель под давлением поступает в шланг 40 из напорного источника (не изображен). Переключатели или клавиатура 42 контроллера 16 и переключатели или клавиатура 44 дистанционного управления 18 обеспечивает операторский интерфейс для управления устройством 10 в режиме ручной работы, режиме автоматической работы, диагностическом режиме и режиме калибрования. Переключатели 42 и 44 функционально идентичны.
Базовый режим работы всей системы или устройства 10 управления или синхронизируется контроллером 16. Контроллер 16 принимает команду настройки от оператора для автоматической работы или сканирования живого животного или туши, обычно коровы или свиньи. Далее, оператор инициирует сканирование живого животного или туши. Контроллер 16 перемещает преобразователь 36 (с помощью двигателя 26) по последовательности предопределенных участков и запускает устройство 12 для выполнения ультразвуковой А развертки. После завершения каждой А развертки устройство 12 обрабатывает сигнал А развертки путем преобразования этого сигнала в цифровую форму в виде около 800 байтов данных и дальнейшего преобразования данных в соответствии с предопределенными режимами работы, на которые запрограммировано устройство 12. Когда оцифрованная А развертка обработана, устройство 12 сигнализирует компьютеру 14 о готовности данных, и компьютер 14 считывает данные через интерфейс. Поэтому длительность цикла наиболее эффективно используется, если анализ данных производится сразу же после готовности данных для каждой развертки. Если компьютер 14 не способен принять дополнительные данные от устройство 12, сигнал подается на контроллер 16 для предотвращения следующего запуска этого устройства 12, пока компьютер обрабатывает данные с выполненной последней А развертке.
Автоматический режим работы позволяет выполнять предопределенные планы разверток. Первый шаг при настройке работы в автоматическом режиме состоит в записывании, загрузке и отлаживании плана развертывания. В настоящее время план развертывания определяется следующим образом: для первых двух дюймов ультразвуковая развертка должна выполняться и оцифровываться каждые одну восьмую дюйма; для следующих двух дюймов развертка должна выполняться через каждую четверть дюйма; и для последних двух дюймов или до окончания перемещения преобразователя развертка должна выполняться и оцифровываться через каждую одну восьмую дюйма. Альтернативно системы выбора из меню позволяет оператору выбрать один или несколько планов развертки, предварительно записанных в память контроллера 16, чтобы перенастройка от свиньи к корове была так же проста, как выбор новой позиции в меню. Ручной режим работы позволяет оператору перемещать ультразвуковое развертывающее устройство произвольным образом в развертываемой области и получать информацию через посредство оцифрованной ультразвуковой развертки. Преобразователь можно перемещать в прямом и обратном направлениях путем нажима и удержания кнопок или переключателей на клавиатуре 42 или клавиатуре 44. Когда преобразователь установлен на желаемый участок, оператор может снять данные нажимом другой клавиши. Преобразователь обладает разрешающей способностью при перемещении, соответствующей наименьшему шагу свойственному аппаратной части, который обычно составляет около 0,01 дюйма.
В калибровочном режиме преобразователь помещают на опору и возбуждают известным сигналом. Обратный сигнал должен иметь пик в известной позиции. Затем автоматически регулируется коэффициент усиления устройства 12, чтобы установить пик на желаемый уровень. Другие калибровочные настройки могут потребовать определение временных смещений в терминах задержки, а также оконного временного анализа ультразвукового сигнала А развертки. Дополнительно диагностические стандартные программы должны выполняться при подаче питания или по заявке оператора, если он пожелает.
Автоматический режим работы предваряется определенными шагами настройки, которые оператор обязан выполнить перед началом автоматический работы. Например, можно ввести порядковый номер живого животного или туши посредством переключателей или клавиатуры 44. Также можно выбрать режим работы сканнера с помощью программы меню, исполняемой компьютером 14. Наконец, оператор может поместить преобразователь в некоторую конкретную начальную позицию, используя шаговый режим, активизируемый с помощью клавиатуры 44. Наконец, оператору надо нажать клавишу "Пуск" на клавиатуре 42 или клавиатуре 44 для инициирования развертывания.
Когда живое животное или туша уже расположена в непосредственной близости от преобразователя 36 и против упоров 48, оператор активизирует один из переключателей на клавиатуре 42 или 44, тем самым задавая начало ультразвукового развертывания. В этот момент контроллер 16 запускает устройство 12 по сигнальному тракту 34, которое излучает импульс ультразвуковой энергии в живое животное или тушу, и анализирует, или "массажирует", отраженные ультразвуковые сигналы, принятые преобразователем 36. Устройство 12 преобразует отраженный ультразвуковой сигнал к цифровой форме и анализирует этот сигнал в соответствии с предварительно запрограммированными рабочими режимами. Компьютер 14 запрограммирован на опрос устройства 12 и принимает данные по GPIB/IEEE 4888 шине 30. Компьютер 14 непрерывно опрашивает устройство 12 в течение развертывания, чтобы определить наличие данных, относящихся к выполняемой ультразвуковой А развертке. Когда данные переданы устройством 12 компьютеру 14, компьютер 14 анализирует эти данные, которые в цифровой форме представляют отражение ультразвукового сигнала от живого животного или туши, и мышечные/жировые прилегающие слои обнаруживаются путем анализа оцифрованного отраженного сигнала. Затем контроллер 16 перемещает преобразователь по дуге и запускает вновь устройство 12 для получения следующей развертки и касающихся ее данных. Вновь данные поступают через интерфейс 30 на компьютер 14 для анализа. Таким образом двигатель 26 перемещает преобразователь 36 в соответствии с сигналами от контроллера 16 по криволинейному элементу 46 опоры 20, пока не будет выполнено достаточное число разверток и, вообще говоря, преобразователь не переместится поперек всего живого животного или туши. Когда компьютер 14 не способен немедленно принять данные от устройства 12, контроллер 16 информирует о задержке по параллельному интерфейсу 32 или последовательному интерфейсу 34, и перемещение преобразователя мгновенно прекращается, пока не истечет задержка (не завершатся вычисления). Затем компьютер 14 определяет площадь сечения длиннейшей мышцы или толщину жировых слоев. Длиннейшую мышцу, толщину жира и глубину длиннейшей мышцы можно индивидуально или в комбинации использовать в прогнозном уравнении для определении оценки сорта или постного содержания животного или туши. Оценка постного содержания используется для определения стоимости живого животного или туши. Дополнительно, ультразвуковая развертка окороковой области живой свиньи или свиной туши или грудной области говяжьей туши представляет дополнительную информацию для использования в прогнозном уравнении, по которому определяется оценка постного содержания живого животного или туши и/или стоимость.
Прогнозные уравнения (приведенные ниже) разработаны исследователями Пурдуе Университета и хорошо известны в мясной промышленности как средство для предсказания "процента постного содержания" и "массы постного мяса" свиной туши. Эти уравнения взяты из статьи Орсутта и др. в журнале Джорнал ов Анимал Сайенс, том 68, стр. 3987, 1990, причем эта статья включена путем ссылки.
Кг постного мяса 2,67 + 0,4 масса теплой туши (кг) 3,31 х 3/4 глубины (см) жира в районе десятого ребра + 0,29 х площадь сечения (см2) поясничной мышцы в районе десятого ребра R2 0,83 RSD 1,99.
Аналогичные уравнения известны для говядины и приняты USDA, а также внесены в агентские стандарты. Уравнения USDA для говядины таковы.
Проценты среза (мяса) 51,34 (5,78 х толщину
(дюйм) жира у 12-го ребра) (0,0093 х масса горячей туши, фунты) (0,462 х-ты почечного, тазового и сердечного жира) + (0,740 х площадь "глазка" у ребер, квадратные дюймы)
Оценка выхода 2,5 +
(0,25 х толщина жира на 12-ом ребре, дюймы) + (0,0038 х масса горячей туши, фунты) + (0,2 х-ты почечного, тазового и сердечного жира) (0,32 х площадь "глазка" у ребер, квадратные дюймы).
Радиус криволинейного элемента 46 равен приблизительно 8,2 дюйма. Этот радиус позволяет преобразователю перемещаться по дуге, которая хорошо согласуется с радиусом живого животного или туши, если измерять его от средней линии или хребта живого животного или туши. Дальнейшие подробности, касающиеся участка, на котором производится ультразвуковые развертки, описаны со ссылками на фиг. 4. Собирающее ультразвуковые данные устройство 12 представляет собой устройство Мини-С модели 1740/1750, поставляемое Системз Ресерч Лабораториз, Инк. отдел Арвин/Калспан, 2800 Индиан Рипл Роад, Дейтон, Огайо 45440. Мини-С устройство способно "массажировать" данные А разверток и детектировать сигнал А развертки в цифровом виде для обнаружения максимальных амплитудных вариаций, характеризующих (являющихся признаками) прилегающих тканей. Такое массажирование выполняется, когда устройство 12 запрограммировано на получение данных в "радиочастотном режиме" (фиг.12-16). Альтернативно устройство 12 генерирует "радиочастотные" развертывающие сигналы (фиг. 12А-16А), которые переводятся в цифровую форму для анализа. Компьютер 14 представляет собой персональный компьютер, который обладает внешней памятью на жестком диске и гибком диске, только считываемой памятью, памятью произвольного доступа, параллельным и последовательным вводами/выводами, платой интерфейс IEEE 488 GP2B, по крайней мере, одним мегабитом памяти произвольного доступа и объединительной платой, базирующейся на микропроцессоре Интел 80286 и содержащей математический сопроцессор. Компьютер 14 также оснащен монитором, принтером, дисковой контроллерной платой. Изображен преобразователь модели N 1 LD-0106-GP, поставляемой Технисоник. Ультразвуковые преобразователи обычно работают в диапазоне 0,5-7,5 МГц. Настоящая система предназначена работать с разнообразными преобразователями в диапазоне частот от 0,5 до 7,5 МГц.
На фиг. 2 более подробно в виде блок-схемы изображены компоненты контроллера 16. Контроллер 16 включает в себя источники питания 50, плату контроллера двигателя 52, выпускаемую Галил (модель N DMC-210), и контроллерную плату 54, которая содержит микропроцессор, обладающий последовательными вводом/выводом, аналого-цифровой преобразователь, параллельные ввод/вывод, только считываемую память, память произвольного доступа. Обмен сигналами и данными между компьютером 14, изображенным на фиг. 1, и контроллером 16 происходит по сигнальным трактам 34 и 32. Например, напряжение от дифференциального трансформатора линейного напряжения (не изображен на рис. 2) преобразуется в цифровой вид контроллерной платой 54 и подается на компьютер 14 по последовательному интерфейсу 34. Клавиши 42 находятся под наблюдением контроллерной платы 54 через посредство линий ввода/вывода сканирования клавишной матрицы, которые входят в сигнальный тракт 56. Дифференциальный трансформатор линейного напряжения соединен с контроллерной платой через сигнальный тракт 58. Как показано на фиг. 3А, дифференциальный трансформатор линейного напряжения передает информацию о линейном смещении, или сигналы, контроллеру 16, затем эта информация передается на компьютер 14 для использования с целью определения позиции преобразователя и вычисления площади лонгиссимусной мышцы. Поэтому, когда живое животное или туша не соответствует радиус криволинейного элемента 46, дифференциальный трансформатор линейного напряжения предоставляет информацию о радиальном положении, используемую для локализации границ прилегания тканей и точного вычисления толщины жира и площади лонгиссимусной мышцы. Дополнительно, сигналы предельных выключателей поступают от опоры 20 на контроллерную плату 54 по сигнальному тракту 60 и на плату контроллера двигателя 52. Предельные выключатели 74, изображенные на фиг. 3А, предотвращают выход преобразователя за пределы опоры и хорошо известны в данной области техники как средство предотвращения повреждений подвижного устройства. Сигналы от поворотного шифратора 90, изображенного на фиг. 3А, представляют информацию о смещения контроллерной плате 54 и контроллеру двигателя 52 по сигнальному тракту 62. Сигналы, идущие по сигнальному тракту 62, сигнальному тракту 60 и сигнальному тракту 58, обозначены сигнальным трактом 28 на фиг. 1. Подвесная станция 44 соединена с контроллерной платой 54 сигнальным трактом 19, как это показано на фиг. 1. Также изображена на фиг. 2 плата драйвера двигателя 64, выпускаемая Галил под маркировкой модель ICB-930. На плату драйвера двигателя 64 поступают мощность от источника питания 50 и сигналы от контроллера двигателя 52. Плата драйвера двигателя 64 подает возбуждающие сигналы на двигатель 26 для правильного позиционирования преобразователя относительно туши животного вдоль криволинейного элемента 46. Источники питания 50 также обеспечивают мощностью плату драйвера 64 и контроллерную плату 54.
На фиг. 3 и 4 изображена опора 20, соответствующая изобретению. Пластина 66 скреплена с пластиной 67. Пластина 67 скреплена с криволинейным элементом 46. Пластины 66 и 67 определяют физическую точку местонахождения при позиционировании живого животного или туши относительно опоры 20. Существенно, чтобы живое животное или туша (коровы или свиньи) позиционировалась так, чтобы линия разреза или средняя линия упиралась в пластины 66 и 67. Выполняя это, живое животное или тушу средней линией или хребтом располагают так, что радиальный центр криволинейного элемента 46 приблизительно соответствовал местонахождению средней линии или хребту живого животного или туши. На верхней поверхности криволинейного элемента 46 цепь обеспечивает сцепление для точной механической тяги между верхней поверхностью криволинейного элемента 46 и приводного двигателя 26. Цепное колесо 70 обеспечивает точное механическое взаимодействие между валом двигателя 26 и цепью 68. Ножки 48 обеспечивают точные опорные точки для упора в живое животное или тушу при позиционировании опоры 20. Разъемы 72 обеспечивают наличие известных электрических соединительных устройств для установления электрических соединений между устройством 12 и опорой 20, а также между контроллером 16 и электрическими/электронными устройствами, установленными на опоре 20. Электрические соединения опоры 20 соответствуют сигнальным трактам и сигналам, передаваемым по ним, обозначенным позициям 22, 24 и 28 на фиг.1. Предельные выключатели 74 расположены так, чтобы предотвращался выход держателя преобразователя 76 за пределы криволинейного элемента 46. Предельные выключатели активизируются кулачками 78 вблизи пределов хода держателя преобразователя 76. Держатель преобразователя перемещается по криволинейному элементу 46 под действием приводного двигателя 26. Механическое крепление, хорошо известное специалистам в данной области, обеспечивает свободу движения между держателем преобразователя 76 и криволинейным элементом 46 так, что держатель преобразователя 76 может перемещаться по внешней дуге криволинейного элемента 46 при вращении вала двигателя 26. Водный трубопровод 80, детально изображенный на рис. 11, закреплен на ультразвуковом преобразователе и движется вместе с ним радиально. Трубопровод 80 охватывает наконечник ультразвукового преобразователя. Водный трубопровод 80 является проводником воды или другого подходящего соединителя в область между преобразователем и живым животным или тушей для обеспечения ультразвукового сигнального сцепления между преобразователем и живым животным или тушей. Резиновый колпак 38 не изображен на фиг.3 и 4, но достаточно детально изображен на фиг.12.
Механический привод дифференциального трансформатора линейного напряжения 82 механически связан с рычагом 84. Рычаг 84 соединен с преобразователем 36 и перемещается радиально относительно криволинейного элемента 46 в соответствии с вариациями радиальной поверхности живого животного или туши. Поэтому благодаря наличию дифференциального трансформатора линейного напряжения имеется сигнал, указывающий радиальное положение преобразователя ("R" на фиг. 5) относительно живого животного или туши, что способствует "нормализации" радиального местонахождения преобразователя относительно опорных координатных точек, что обеспечивает вычисление толщины жира и площади лонгиссимусной мышцы с высокой степенью точности. Пружина 86 воздействует на преобразователь, установленный внутри держателя преобразователя 76, таким образом, что преобразователь свободно движется в радиальном направлении в направлении живого животного или туши, в результате чего резиновый колпак 38 оказывается прижатым к живому животному или туше с усилием от двух до трех грамм. Усилие нажима колпака на живое животное или тушу способствует удержанию резервуара воды или другого соединителя в области между преобразователем и живым животным или тушей для обеспечения сигнального сцепления между преобразователем и живым животным или тушей. Шланг 40 подает под напором воду или подходящий соединитель в (водный или) соединительный трубопровод 80. Кабель 88 имеет проводники, которые обеспечивают электрическое соединение между преобразователем 36 и собирающим ультразвуковые данные устройством 12. Звездочка 88 закреплена на валу шифратора 90. Шифратор 90 обеспечивает информацией обратной связи контроллер двигателя 52, изображенный на фиг. 2, и контроллерную плату 54. Соединительный трубопровод 80 имеет губу 80а для обеспечения хорошего уплотнения между колпаком, изображенным на фиг. 12, и соединительным трубопроводом 80.
Поворотным оптическим шифратором малых приращений 90 является шифратором модели E116, поставляемый BEI Мошион Системз Компани, отдел Компьютерных изделий, Сан Маркос, Калифорния 92069. Приводным двигателем 26 является двигатель постоянного тока с планетарной передачей модели А-1430, поставляемый TRW. Дифференциальным трансформатором линейного напряжения является МНР серийное миниатюрное устройство модели SMS (СРМ-109А, поставляемое Шаевитц, 7905 N. Rte, Пенсавкен, Нью Джерси 08110.
Контроллер двигателя 52, изображенный на фиг. 2, позволяет подходящим образом программировать двигатель 26, перемещать двигатель преобразователя 76 в желаемую позицию сканирования. Могут применяться разнообразные системы управления движения, хорошо известные специалистам.
На фиг. 5 изображено поперечное сечение криволинейного элемента 46, расположенного вблизи поперечного сечения грудинки/корейки живого животного или туши 92. Математические соотношения, которые устанавливаются, когда живое животное или туша 92 правильно расположена в непосредственной близости от криволинейного элемента 46, представлены на фиг. 5. Исходная опорная точка, обозначенная Х 0, У 0, определяет опорную точку, определяет опорную точку, относительно которой ведутся вычисления с учетом радиуса R, чья центральная ось располагается в точке, которая обеспечивает правильную ориентацию живого животного или туши. Обычно длина радиуса R лежит в интервале от 5 5/8 дюйма до 6 5/8 дюйма. При перемещении преобразователя по кривой А ультразвуковые сигналы подаются на живое животное или тушу 92 и отраженные сигналы принимаются устройством 12. Координаты точек РК1, РК2, РК3 и РК4 (соответствующих пикам прилеганий тканей 1, 2, 3 и 4) определяются по приведенным ниже формулам, которые также приведены на фиг.5.


TOF является сокращением "длительность прохождения ультразвукового сигнала", и V обозначает скорость прохождения ультразвукового сигнала через соответствующие ткани. Индексы "жир" и "мышца" указывают, что длительность прохождения и скорость в жиру и мышце используются для вычисления координат Х и У точек РК1 до РК4. Угол θ представляет собой угол между средней линией или осью У, и точкой нахождения преобразователя в любой момент в течение процесса развертывания.
Поскольку разнообразные пики (РК1-РК4) обнаруживаются при каждой развертке, программное обеспечение, реализуемое компьютером 14, определяет толщину первого, второго и третьего жировых слоев, а также радиальное местонахождение передней и задней поверхностей лонгиссимусной мышцы, в то время как преобразователь 36 движется вдоль криволинейного элемента 46 и выполняются развертки. В результате этого получают, или определяют, некоторое число точек, которые определяют площадь сечения длиннейшей мышцы. Более конкретно, точками, в которых выполняются ультразвуковые развертки, являются точки, например, расположенные с шагом 1/8 дюйма по радиусу для первых двух дюймов, которые проходит преобразователь 36 от средней линии, с шагом 1/4 дюйма для следующих двух дюймов вдоль радиуса, которые проходит преобразователь по криволинейному элементу, и с шагом 1/8 дюйма для последних двух дюймов или до конца хода преобразователя вдоль криволинейного элемента 46.
На фиг. 6 изображено поперечное сечение грудинки/корейки животного или туши, на котором три участка логниссимусной мышцы обозначены позициями 92а, 92б, 92с. Эти участки ниже будут именоваться спинным участком длиннейшей мышцы 92а, основным участком 92б и вентральным участком 92с. Площадь основного участка 92б определяется путем вычисления площади, заключенной внутри последовательности прилегающих четырехугольников, определяемых пиками РК3 и РК4, по отдельности и последующего сложения площадей этих площадей. Площади спинного участка 92а и вентрального мышечного участка 92с приблизительно вычисляются по приведенным ниже формулам. Если толщина спинной длиннейшей мышцы (измеряемая вдоль внутреннего торца спинной длиннейшей мышцы 92а) больше и равна 1,2 дюйма, то площадь этой мышцы внутри спинного мышечного участка равна 1,44 х (толщина поясничного "глазка" 1) кв. дюймов. Если толщина спинного мышечного участка больше 0,5 дюйма и менее 1,2 дюйма, то площадь спинного мышечного участка равна 0, 41 х (толщина поясничного "глазка" 0,21) квадратных дюйма. Если толщина спинного мышечного участка равна или менее 0,5 дюйма, то площадь спинного мышечного участка 92а равна 0 квадратных дюймов.
Площадь сечения вентрального участка 92с вычисляется по приведенным ниже формулам. Если толщина вентрального мышечного участка (измеряемая вдоль внутреннего торца вентрального участка мышцы 92с) больше или равна 1,7 дюйма, то мышечная площадь сечения равна 2,2 х (толщина длиннейшей мышцы 3,3) квадратных дюймов. Если толщина спинного мышечного участка меньше 1,7 дюйма и больше 0,5 дюйма, то площадь вентрального мышечного участка равна 0,36 х (толщина длиннейшей мышцы 0,18) квадратных дюймов. Если толщина вентрального мышечного участка меньше 0,5 дюйма, то площадь сечения вентрального мышечного участка полагается равной квадратных дюймов.
На фиг. 7 изображен четырехугольник, имеющий четыре стороны, диагонали и точки пересечения, которые для удобства обозначены позициями. Ниже приведены формулы, по которым вычисляются площади каждого конкретного четырехугольника. Известные точки, определяющие различные четырехугольники, составляющие основной мышечный участок 92б (точки РК3 и РК4 определяются в ходе развертывания), используются для определения четырехугольника, суммарная площадь которых определяет общую площадь основного мышечного участка 92б с высокой точностью.
Площадь
четырехугольника 1/4 Vpo-(δ+g-a-c)2,
где:
p (XT1 XB0)2 + (YT1 YB0)2,
g (XT0 XB1)2 + (YT0 YB1)2,
a (XT0 XT1)2 +
(YT0 YT1)2
δ
(XT0 XB0)2 + (YT0 - YB0)2,
c (XB0 XB1
)2 + (YB0 YB1)2,
d (XT1 XB1)2 + (YT1 YB1)2.
На фиг.8 представлена блок-схема программы, выполняемой компьютером 14, которая определяет точки прилегания тканей и исправляет ошибочные данные, обеспечивая получение точных замеров толщины жира и мышечной площади "глазка" в соответствии с изобретением. На шаге 150, если принятой командой является "1", выполнение программы продолжается с шага 152, на котором программа считывает данные с устройства 12 для определения точек прилегания тканей. После выполнения шага 152 программа переходит к шагу 154. Если ответом на запрос на шаге 150 будет "Нет", то выполнение программы продолжается с шага 154. На шаге 154, если принята команда "2", то на шаге 156 анализируются точки прилегания для определенных разверток и исправляются ошибочные данные. Если на шаге 154 командой не является "2", то выполнение программы продолжается с шага 158. Если на шаге 158 принята команда "3", то записи о тканях стираются из памяти на шаге 160.
На фиг.9 изображена более детальная блок-схема считывания данных и определения прилегания тканей, которые выполняются на шаге 152 (фиг. 8). Реализуемый алгоритм предполагает определение положения спинной части в области груди или поясницы и последующее определение точек прилегания тканей в направлении местонахождения преобразователя. Данные, полученные компьютером 14 от устройства 12, включают в себя номер развертки, который является порядковым номером, присваиваемым с приращением в единицу каждой группе байтов, определяющих развертку, при этом каждая из оцифрованных разверток содержит приблизительно 8 000 байтов данных. На шаге 180 (фиг.9) формируется номер развертки, или номер А развертки, и выполняется просмотр таблицы номеров А разверток с целью обнаружения двойника на шаге 182. После шага 182, на шаге 184, если текущий номер А развертки не является номером, который ранее был присвоен уже полученной развертки, обновляется показание счетчика А разверток и индекс на шаге 186 после шага 184. Если результатом теста на шаге 14 является неудача, выполнение программы продолжается с шага 188. Программа продолжает выполняться с шага 188 так же после шага 186. На шаге 188 точки данных А развертки, соответствующие номеру А развертки, полученные на шаге 180, считываются компьютером 13 по IEEE 488 интерфейсу. Затем на шаге 190 данные А развертки разбиваются приблизительно на 300 групп по 25 точек данных в группе. Затем для каждой группы, определенной на шаге 190, на шаге 192 вычисляется среднее значение. На шагах 194 и 196 выполняется цикл для групп с номерами 1 до 150 для обнаружения последнего появления среднего пикового значения, большего 150 (или другого предопределенного пикового значения). На шаге 198 определяется начало соединительной ткани, которая характеризуется минимумом, предшествующим последнее пиковое значение, большее 150, которое обнаружено в цикле на шагах 194 и 196. После шага 198 на шаге 200 определяется время входа в мышечную область, которое совпадает с началом соединительной ткани. После шага 200 на шагах 202 и 204 выполняется цикл над последними 150 группами данных, причем каждая группа состоит из точек для определения наиболее раннего появления пики, превышающего некоторое предопределенное значение или 138 на шаге 204. Цикл шагов 202 и 204 выполняется 150 раз с последними 150 группами данных. После 150-го выполнения цикла, выполнение программы продолжается с шага 206, на котором определяется время выхода, то есть время, когда сигнал пересекает заднюю поверхность мышцы, которое совпадает с наиболее ранним пиком, превышающим 138. На шаге 208 определяется конец мышечного участка, который сопоставляется с временем выхода, которое является моментом времени, когда обнаружен наиболее ранний пик, превышающий 138, на шаге 206. Затем выполняется возврат к подпрограмме обращения.
На фиг. 10 представлена более детальная блок-схема шага "исправление ошибочных данных", изображенного под позицией 156 на фиг. 8. Артифакты и данные, которые после считывания оказались вне допустимых размеров, исправляются этой стандартной подпрограммой. Например, если точка В на фиг. 21 неправильно определена программным алгоритмом, представленным на рис. 9 или рис. 11, то для определения скорректированного положения точки В на фиг. 21 используются данные соседних разверток (на фиг. 15 дан пример соседней развертки). На шаге 220 все А развертки, ранее запомненные, сортируются по номеру развертки с помощью пузырькового типа подпрограммы, хорошо известной специалистам в программировании. Далее на шаге 222 определяется кластерное значение для "времен входа", соответствующих разверткам с порядковыми номерами с 5 по 8, с помощью подпрограммы "К-средние", которая хорошо известна специалистам (копия программы приложена после описания предпочтительного варианта осуществления). В частности, подпрограмма "К-средние" находит центральное значение для кластера точек в X-Y координатной плоскости. Поэтому центральное значение вычисляется для времен входа, определенных в развертках с порядковым номером с 5 по 8, с помощью подпрограммы 222-го шага. Затем на 224 шаге, если "время входа" развертки 5 минус "кластерное центральное значение входа" больше предопределенного предела, то "время входа" для развертки 5 устанавливается равным "кластерному центральному значению" на шаге 226. Если условие на шаге 224 не выполнено, то продолжение выполнения программы начинается с шага 228. Далее на шаге 228 группируется (то есть организуются в кластер) "времена выхода" для разверток с порядковыми номерами с 5 по 8 с помощью алгоритма "К-средние", как это делалось на шаге 222 для "времен входа". Потом на шаге 230, если "время выхода" развертки номер 5 минус "кластерное центральное значение выхода", вычисленное на шаге 228, больше предопределенного предела на шаге 224, то "время выхода" для развертки номер 5 устанавливается равным "центральному кластерному значению выхода" на шаге 232. Если результатом на условие на шаге 230 будет "нет", то выполнение программы продолжится с шага 234. На шаге 234 цикл "пока", включающий шаги 236 и 238, выполняется, пока номер П развертки не сравняется с шестью или станет меньше или сравняется с общим числом А разверток, принятых от устройства 12. На шаге 236, если "время входа"для следующей А развертки минус "время входа" для текущей развертки больше предопределенного предела, то "время входа" для следующей А развертки устанавливается равным "времени входа" текущей развертки. Счетчик "а" предназначен приписывать индексы на шагах 236 и 238, соответствующие номеру развертки обнаруженному на шаге 234. Номер развертки увеличивается при каждом проходе цикла из шагов 234 и 236, чтобы время входа всех соседних разверток были сравнены друг с другом. Если на шаге 236 удовлетворяется условие, то время входа следующей развертки устанавливается равным времени входа развертки с текущим номером. Когда развертки с порядковыми номерами с 6 по последний окажутся обработанными в цикле "пока" на шаге 234, выполнение программы будет продолжено с шага 240, на котором цикл "пока", состоящий из шагов 242 и 244, выполняет задание, аналогичное выполняемому на шагах 242 и 244, над временами выхода для соседних разверток с номерами с шестого по последний. На шаге 242, если "время выхода" соседний развертки минус время выхода текущей развертки больше предопределенного предела, то время выхода для следующей развертки устанавливается равным времени выхода текущей развертки на шаг 244. После шага 244 выполнение программы вновь начинается с шага 240, на котором цикл "пока" увеличивает порядковый номер развертки на единицу, пока не будет достигнут номер последней развертки. Когда будет достигнут номер последней развертки на шаге 240, выполнение программы продолжается с шага 246, на котором времена входа и выхода, определенные и скорректированные этой программой, возвращаются в базу данных, и мышечные записи обновляются на шаге 248. Затем выполнение программы возвращается в подпрограмме запрос.
На фиг. 11 представлен альтернативный вариант реализации шага 152 "считать данные и определить прилегание тканей", представленного на рис. 8. В этом варианте осуществления координаты, или места, прилегания тканей определяется в соответствии с альтернативным вариантом алгоритма. На шаге 250 компьютер 14 запрашивает порядковый номер А развертки от устройства 12 через IEEE 488 интерфейс 30. Устройство 12 отвечает представлением порядкового номера развертки. На шаге 252 компьютер 14 просматривает таблицу порядковых номеров А разверток, хранящуюся в памяти, с целью обнаружения двойника. На шаге 254, если текущий порядковый номер А развертки ранее не был использован, то выполняется шаг 256 и обновляется показание счетчика А разверток, а также индексовый счетчик в памяти. Если на шаге 254 будет обнаружено, что порядковый номер А развертки ранее не использовался, то выполнение программы продолжается с шага 258, на котором компьютер 14 считывает точки данных А развертки из устройства 12 через IEEE 488 интерфейс 30. Затем на шаге 260 данных А развертки разбиваются на 300 групп, причем каждую группу образуют 25 точек. На шаге 262 вычисляется среднее значение для каждой из групп, определенных на шаге 260. Затем на шагах 264 и 266 для групп с порядковыми номерами с 1 по 150 определяется последнее появление пикового среднего значения, превышающего 150. Когда будет полностью выполнен цикл шагов 264 и 266 для групп с порядковыми номерами с 1 по 150, выполняется шаг 268. На шаге 268 определяется начало соединительной ткани по времени появления групповой средней величины, определенной для групп с порядковыми номерами с 1 по 150, которое является минимальным средним значением, которое предшествует последнему пику, найденному на шаге 266. На шаге 270 время входа в мышечный участок устанавливается равным времени начала соединительной ткани, определенному на шаге 268. На шаге 272 запоминается 300-е среднее значение в качестве первого пикового значения. На шаге 274 запоминается 299-е групповое среднее значение в качестве второго пикового значения. После шага 274 выполняется цикл, состоящий из шагов с порядковыми номерами с 276 по 288, для групп с порядковыми номерами, начиная с 300 и кончая 150, с уменьшением показания счетчика циклов. На шаге 278 текущее групповое среднее значение сравнивается с соседними средними значениями для определения факта наличия пика или его определения. После обнаружения пика на шаге 278, на шаге 280 этот пик сравнивается с пиковыми значениями, найденными на шагах 272 и 274. Если этот пик больше обоих текущих пиков, то выполняется шаг 282 и меньший пик заменяется на пик, найденный на шаге 278. Если на шаге 280 условие не выполнено, то выполняется шаг 284, на котором, если пик, найденный на шаге 278, больше одного из двух текущих пиков, то выполняется шаг 286 и меньший из двух пиков, найденных на шаге 272 и шаге 274, заменяется на пик, найденный на шаге 278. Если условие на шаге 284 не выполнено, то пик, найденный на шаге 278, уничтожается на шаге 288. Выполнение программы продолжается с шага 2760 за которым следуют шаги 282, 286 и 288. Цикл, состоящий из шагов с 276 по 288, будет выполнен для групп с порядковыми номерами с 300 до 150. Затем выполнение программы продолжается с шага 290, на котором определяется "конец временного интервала" "грудинка/корейка" по положению последнего текущего пика в группе средних значений, вычисленных для этих данных. Положение этого значения соответствует времени прохождения ультразвукового сигнала и, следовательно, непосредственно соответствует толщине мышечного или жирового участка, который был определен по концу участка прилегания (грудинки/корейки) тканей. После шага 292 определяется время выхода по другому, или второму текущему пиковому значению, которое найдено при выполнении цикла из шагов с 276 по 288. После шага 292 программа возвращается к подпрограмме запроса.
На фиг.12 представлен в увеличенном масштабе частичный вид преобразователя 36 с резиновым колпаком, который надет поверх блока из преобразователя и трубопровода соединительной жидкости. Вода или другой соединитель, поступая в трубопровод 80 по шлангу 40, проходит в камеру 94 и заполняет камеру 94 так, что соединительная жидкость находится между преобразователем 36 и живым животным или тушей 92. Губа 38а цилиндрического колпака 38 служит уплотнением, когда небольшое усилие пружина 86 оказывает на колпак, прижимая его к животному или туше, как показано на фиг. 3. Кольцо 80а трубопровода соединительной жидкости 80 создает область увеличенного диаметра, в которой уплотнение соединено с колпаком 38 для образования емкости или камеры 94 и удержания в ней воды.
На фиг. 13-21 и фиг.14-22 представлены соответственно "полные видео" и соответствующие "радиочастотные" сигналы, генерируемый устройством 12 и преобразованные для последующего анализа в числовую форму компьютером 14, для точек, отстоящих от одного дюйма до пяти дюймов от средней линии. На каждом графическом представлении сигналов фронт длиннейшей мышцы обозначен буквой А и зад длиннейшей мышцы обозначен буквой В. Дополнительно, зад корейки/грудинка представлен пиком в точке С. Наконец, прилегание первого и второго жировых слоев обозначено в точках b; Эти пики, или точки прилегания тканей, являются первичными индикаторами местонахождения, используемыми устройствами 10 для определения точек прилегания тканей и вычисления толщин тканей и площадей участков длиннейшей мышцы. Случается, что у животного или туши имеется третий жировой слой, и обычно этот слой находят по пику в точке Е. Однако на этом рисунке третий жировой слой не изображен и нет соответствующего пика. Дополнительно, наиболее важными границами прилегания, которые найдены, являются точки А и В, которые определяют перед и зад длиннейшей мышцы. Эти точки являются критическими для определения площади мышцы с высокой степенью точности.
На фиг. 23 изображена радиочастотная развертка, созданная устройством 12 для живой свиньи или свиной туши. Границы прилегания тканей на этом графитовом изображении лучше различимы, благодаря повышению качества калибрования и настройки устройства 10. Точки А и В определяют границы длиннейшей мышцы. Точка С соответствует задней поверхности корейки/грудинки. Точка b определяет прилегание первого и второго жировых слоев. Далее, точка К определяет прилегание второго и третьего жировых слоев. Фиг.23 дает пример дополнительного жирового слоя, который иногда может присутствовать и регистрироваться. Следует заметить, что сигнал радиочастотной или полностью видео развертки идентичен для живой свиньи и свиной туши.
На фиг. 24 изображена радиочастотная развертка, создаваемая устройством 12 для живой коровы или говяжьей туши. Границы прилегания тканей на этом графическом представлении более легко различимы, благодаря повышению качества калибрования и настройки устройства 10. Точки А и В определяют границы длиннейшей мышцы. Точка С определяет заднюю поверхность корейки/грудинки. Точка b является прилеганием первого и второго жировых слоев. Следует заметить, что сигнал радиочастотной или полностью видео развертки идентичен для живой коровы и говяжьей туши.
Альтернативный вариант, использующий некоторое множество преобразователей, расположенных в плоскости, может дать результат, аналогичный получаемому с устройством 10. ЫЫЫ22
Реферат
Изобретение касается устройства и способа для измерения параметров, определяющих толщину или содержание жира и глубину или площадь мышцы. Изобретение предназначено для сортировки мяса или живых животных. Устройство содержит ультразвуковой преобразователь и анализирующее устройство, которое вырабатывает информацию о параметрах ультразвуковых импульсов в числовой форме. Отдельный контроллер перемещает ультразвуковой преобразователь по предопределенной траектории вблизи живого животного или туши и снимаются параметры импульсов в предопределенных точках (развертки) вдоль траектории. Развертки преобразуются в числовую форму и анализируются для определения границ прилегания тканей. Предложены уравнения для определения площади длиннейшей мышцы и толщин жировых слоев, благодаря чему можно вывести оценку содержания постного мяса. Также использован методы моделирования для оценки определенных частей площади длиннейшей мышцы животного или туши на основе данных, собранных во время ультразвуковой развертки туши. Дополнительно предполагается, что развертывание окороковой области с помощью ультразвукового сканнера повысить надежность данных, получаемых развертыванием корейки или грудинки, если воспользоваться предсказывающим постность уравнением. 3 с.п. и 13 з.п. ф-лы, 24 ил.

Комментарии