Вращающаяся тестоформовочная машина - RU2705546C1
Код документа: RU2705546C1
Чертежи



Описание
Изобретение относится к вращающейся тестоформовочной машине, содержащей раму, формовочный валик, установленный на раме с возможностью вращения, нож для соскабливания теста с формовочного валика, упомянутый нож продолжается по формовочному валику, и приводное устройство для перемещения ножа между положением соскабливания и неактивным положением. Дополнительно изобретение относится к способу управления вращающейся тестоформовочной машины.
Вращающиеся тестоформовочные машины содержат вращающийся формовочный валик, имеющий на поверхности множество форм в виде полостей (или углублений) для приема теста. Подающий ролик (также именуемый нажимной валик) подает тесто, поступающее из бункера, в зазор между формовочным валиком и подающим валиком и загружает тесто в формы формовочного валика. Чтобы удалить лишнее тесто с формовочного валика предусматривается нож для соскабливания теста с поверхности формовочного валика. Тесто, оставшееся в формах, впоследствии удаляется из формовочного валика обычно посредством ремня, который перемещается впритык к формовочному валику.
Согласно известному уровню техники регулирование ножа во вращающихся формовочных машинах выполнялось исполнительным механизмом, расположенным с одной стороны машины. Затем перемещение исполнительного механизма передавалось также на противоположную сторону машины механическими соединениями, которые также обеспечивали синхронное перемещение двух концов ножа. Регулирование соединения между обеими сторонами машины производилось во время заводской сборки, как постоянная настройка, которую нельзя изменять во время работы машины. Однако, во время работы наблюдаются разности продукта по весу вращающихся форм из стороны в сторону, которые возникают, в основном, из-за регулирования с частичной оптимизацией основных компонентов машины, т.е., формовочного валика, подающего валика или ножа. Дополнительный недостаток может заключаться во множестве передаточных компонентов направляющих конструкций для передачи перемещения исполнительного механизма также к другой стороне машины, что требует усложнения конструкции и повышения стоимости. Более того, механические соединения, продолжающиеся в одном и том же пространстве, в котором тесто подается валиками, затрудняет соответствие гигиеническим требованиям. Со временем компоненты загрязняются тестом, и требуют очищения или замены.
Соответственно, задачей изобретения является создание усовершенствованного вращающегося тестоформовочного устройства. В частности, вращающееся тестоформовочное устройство предусматривает оптимальное регулирование ножа относительно формовочного валика, а также соответствие гигиеническим требованиям. Конструкция должна быть простой и экономичной в пространственном отношении.
Проблема изобретения решается вращающейся тестоформовочной машиной, как определено в первом параграфе, в которой приводное устройство содержит первый привод, воздействующий на первый конец ножа, и второй привод, воздействующий на второй конец ножа, при этом первый привод и второй привод можно привести в действие независимо друг от друга. Следовательно, первый конец ножа и второй конец ножа регулируются независимо друг от друга.
Первый привод воздействует на первый конец ножа, вызывая перемещение первого конца ножа по первой линии перемещения, а второй привод воздействует на второй конец ножа, вызывая перемещение второго конца ножа по второй линии перемещения, при этом первая линия перемещения и вторая линия перемещения расположены по существу параллельно друг другу. Предпочтительно, что первая линия перемещения и вторая линия перемещения определяются параллельными направляющими.
Изобретение позволяет достигнуть оптимального регулирования ножа относительно формовочного валика. Возможность независимого приведения в действие приводов предусматривает равномерное регулирование ножа по всей длине формовочного валика. Допуски или регулирование с частичной оптимизацией других компонентов машины, особенно формовочного валика, можно надежно компенсировать и на любом этапе работы. Более того, механические соединения, продолжающиеся от одной стороны к другой стороне машины больше не нужны, гарантируя высокий гигиенический стандарт.
Формовочный валик имеет на поверхности множество форм в виде полостей (или углублений) для приема теста. Нож используется для удаления (соскабливания) избыточного теста с поверхности формовочного валика. Тесто, оставшееся в формах, впоследствии удаляется из формовочного валика обычно посредством ремня. Вращающаяся тестоформовочная машина используется для изготовления выпечных изделий, например, печенья, булочек, крекеров и т.д. После формования посредством вращающейся тестоформовочной машины (промежуточные) изделия помещаются в духовку для выпекания.
Нож продолжается между первым концом и вторым концом по формовочному валику. Край ножа продолжается по существу параллельно формовочному валику. В положении соскабливания нож может примыкать к формовочному валику, а в неактивном положении (не соскабливания) нож находится на расстоянии от формовочного валика. В этом неактивном положении нож можно вынуть из машины с целью чистки или обслуживания.
Каждый привод может непосредственно или опосредовано (например, через передаточный элемент, сцепление или опору) воздействовать на соответствующий конец ножа.
И первый привод, и второй привод содержит исполнительный механизм, предпочтительно, двигатель или цилиндр. И исполнительный механизм первого привода, и исполнительный механизм второго привода можно привести в действие (в частности, активизировать) независимо друг от друга. Исполнительный механизм можно активизировать предпочтительно электрической, магнитной, пневматической и/или гидравлической энергией. Приводы могут передавать линейное движение, вращательное движение и/или комбинации этих движений. Предпочтительным вариантом является шпиндельный привод.
Предпочтительно, что вращающаяся тестоформовочная машина содержит подающий валик, установленный на раме с возможностью вращения, при этом оси вращения формовочного валика и подающего валика по существу параллельны друг другу, и при этом в положении соскабливания нож продолжается в зазор между формовочным валиком и подающим валиком. Подающий валик (также нажимной валик) подает тесто в зазор между формовочным валиком и подающим валиком и загружает тесто в формы на поверхности формовочного валика. Хотя можно было бы использовать другие подающие или нажимные средства (нажимной ремень, стационарная стенка и т.д.) для вдавливания теста в формы формовочного валика, подающий валик является наиболее предпочтительным, выдавая оптимальные результаты в отношении формы изделий. Обычно бункер (для облегчения ввода теста) предусмотрен над зазором, образованным между формовочным валиком и подающим валиком.
В предпочтительном варианте вращающаяся тестоформовочная машина содержит устройство управления, которое взаимодействует с первым приводом и вторым приводом, при этом приводы приводятся в действие устройством управления автоматически и/или в зависимости от команд, генерируемых посредством интерфейса оператора (например, сенсорный экран, мышь, пульт). Это предусматривает точное и надежное регулирование ножа также во время работы машины. Отклонения оптимального регулирования можно скорректировать немедленно.
В предпочтительном варианте вращающаяся тестоформовочная машина содержит
- первый датчик, определяющий перемещение и/или положение первого конца ножа и/или нагрузку на первый конец ножа, и
- второй датчик, определяющий перемещение и/или положение второго конца ножа и/или нагрузку на второй конец ножа. Концы ножа можно регулировать независимо друг от друга (независимыми) датчиками. В частности, отклонения от оптимального регулирования ножа можно надежно обнаружить. Датчиком может быть, например, (линейный) шифратор, например, шифратор перемещения или бесконтактный датчик. Значением, измеренным датчиком, может быть непосредственная или опосредованная мера перемещения, положения или нагрузки конца ножа. (Первым и вторым) датчиками могут быть линейные шифраторы или шифраторы углового положения, датчики давления и/или силы (например, содержащие, по меньшей мере, один пьезоэлектрический элемент или тензодатчик) бесконтактные датчики (например, оптический или емкостной или индуктивный датчик) и т.д.
В предпочтительном варианте первый датчик и второй датчик взаимодействуют с устройством управления, при этом устройство управления может управлять приводами в зависимости от значений, измеренных датчиками, и/или отображать значения на интерфейсе оператора (например, экране), полученные датчиками.
В предпочтительном варианте
- нож продолжается между первым участком рамы и вторым участком рамы и при этом
- первый конец ножа поддерживается первой опорой, которая прикреплена с возможностью вращения к первому участку рамы и соединена с первым приводом, и
- второй конец ножа поддерживается второй опорой, которая прикреплена с возможностью вращения ко второму участку рамы и соединена со вторым приводом. Здесь опора действует как соединительный элемент между каждым приводом и соответствующим концом ножа. Каждая опора удерживается соответствующим участком рамы. Первым и вторым участками рамы являются участки рамы, которые также поддерживают формовочный валик (и - если необходимо – подающий валик).
В предпочтительном варианте первая опора продолжается через первый участок рамы, а вторая опора продолжается через второй участок рамы. В этом варианте только опора продолжается в пространство между первым и вторым участками рамы. Расположения других частей, относящихся к регулированию ножа, можно избежать в этом (внутреннем) пространстве.
В предпочтительном варианте каждый датчик соединен с одной стороны с опорой, а с другой стороны с участком рамы. Здесь, относительное перемещение/положение между опорой и участком рамы является непосредственной мерой перемещения/положения ножа. Как уже упоминалось, датчик может быть выполнен в виде (линейного) шифратора.
В предпочтительном варианте первый привод отделен в пространственном отношении от ножа первым участком рамы, а второй привод отделен в пространственном отношении от ножа вторым участком рамы. Здесь, приводы расположены снаружи участков рамы, а нож продолжается внутрь участков рамы. Гигиенический стандарт повышается, поскольку приводы (полностью) отделены от внутреннего пространства рамы, которое также содержит тесто во время работы. Обслуживание и замена приводов также облегчается этим вариантом.
В предпочтительном варианте каждая опора имеет внутренний участок, обращенный к ножу, и наружный участок, отделенный в пространственном отношении от ножа соответствующим участком рамы, при этом внутренний участок и наружный участок можно отделить друг от друга, предпочтительно, ослаблением по меньшей мере одного винта.
В предпочтительном варианте нож свободно расположен на первой опоре и на второй опоре, предпочтительно, на конструкции, соответствующей форме. Чистка и замена ножа намного упрощается. Конструкцией, соответствующей форме, может быть углубление в опоре.
В предпочтительном варианте первый участок рамы образует первую направляющую, предпочтительно, направляющую с пазами, в которой перемещается скольжением первая опора, а второй участок рамы образует вторую направляющую, предпочтительно, направляющую с пазами, в которой перемещается скольжением вторая опора, при этом предпочтительно направляющие имеют дугообразную форму. Здесь раму можно использовать в качестве направляющей для опоры.
В предпочтительном варианте каждая опора взаимодействует с соответствующей направляющей посредством по меньшей мере одного скользящего диска, предпочтительно выполненного из пластика, вставленного между опорой и направляющей, предпочтительно, в углубление, образованное в опоре или направляющей. Обычно рама и опора выполнены из (нержавеющей) стали. Скользящий диск, выполненный не из стали, а из другого материала, может уменьшить трение во время регулирования ножа.
В предпочтительном варианте первый привод и второй привод являются линейными приводами, при этом предпочтительно первый привод прикреплен с возможностью поворота к первому участку рамы и прикреплен с возможностью поворота к первой опоре, и/или второй привод прикреплен с возможностью поворота ко второму участку рамы и прикреплен с возможностью поворота ко второй опоре. Линейные приводы, которые закреплены только (двумя) винтами (один винт в каждой точке поворота), можно легко снять, например, для обслуживания.
В предпочтительном варианте нож непрерывно регулируется приводами между первым положением и вторым положением. Становится возможным точное регулирование ножа.
В предпочтительном варианте нож образован основанием и лезвием, прикрепленным к основанию, при этом предпочтительно основание имеет концевые участки, продолжающиеся за лезвие, и каждый привод действует на соответствующий концевой участок основания.
Проблема также решается способом управления вращающейся тестоформовочной машиной, содержащим регулирование ножа относительно формовочного валика, при этом первый конец ножа и второй конец ножа регулируются независимо друг от друга. Здесь следует отметить, что варианты вращающейся тестоформовочной машины и представленные соответствующие преимущества в равной степени относятся к способу.
Изобретение дополнительно позволяет выполнить электронную калибровку регулирования ножа посредством HMI (интерфейс для управления концентратором) машины. Дисбалансы в положении ножа, обнаруживаемые во время изготовления может скорректировать пользователь также на HMI простыми установочными параметрами. Независимые датчики (например, датчики перемещения) с двух сторон также выполняют обнаружение возможных ошибок регулирования и позволяют системе управления машины решать, как реагировать. Удаление механических соединений, подшипников и зубчатых сегментов из зоны изделий (между частями рамы) представляет значительное преимущество в отношении гигиенического дизайна машины. Предпочтительно, только внутренний участок опоры находится внутри зоны изделий. Все остальное находится снаружи рамы/шасси машины.
Для лучшего понимания изобретения ниже приведено более подробное описание со ссылками на следующие фигуры в упрощенном схематическом представлении:
На Фиг. 1 показано схематическое изображение вращающейся тестоформовочной машины,
На Фиг. 2 показан вид сверху вращающейся тестоформовочной машины,
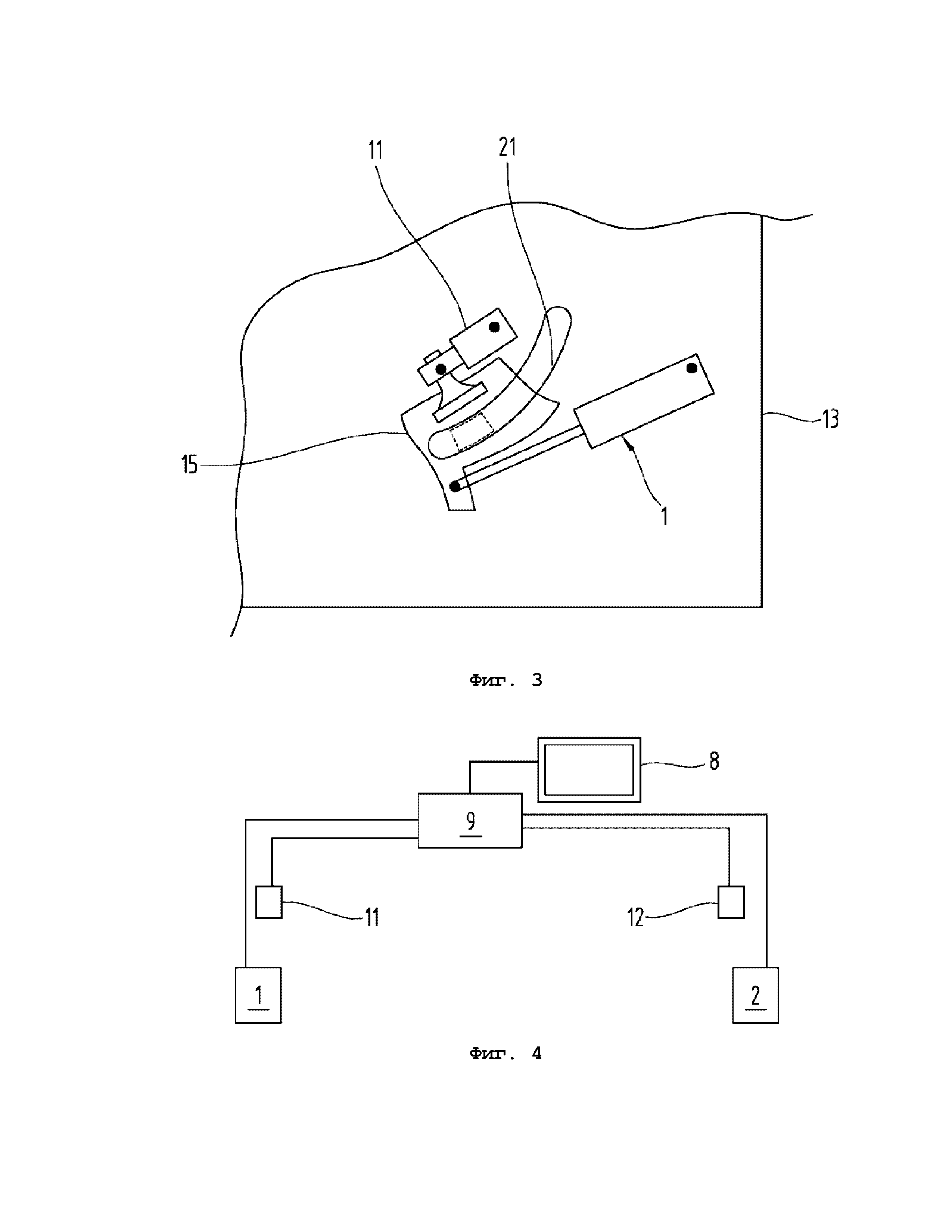
На Фиг. 3 показан вариант привода, датчика и опоры ножа,
На Фиг. 4 показана связь между приводами, датчиками и устройством управления,
На Фиг. 5 показан нож и приводное средство (без рамы),
На Фиг. 6 показан подробно вариант привода, датчика и опоры ножа.
Как правило, одни и те же части или подобные части обозначаются одними и теми же/подобными названиями и ссылочными позициями. Признаки, изложенные в описании, применяются к частям с одними и теми же/подобными названиями, соответственно, ссылочным позициям. Указание ориентации и относительного положения (вверх, вниз, в сторону и т.д.) относится к соответствующей Фигуре, и указание ориентации и относительного положения должно быть соответственно исправлено в разных Фигурах, смотря по обстоятельствам.
На Фиг. 1 показана вращающаяся тестоформовочная машина 10, содержащая раму 6, формовочный валик 4 и подающий валик 5, оба установлены в раме 6 с возможностью вращения относительно параллельных осей вращения, и нож 3 для соскабливания теста с формовочного валика 4. В поверхности формовочного валика 4 образовано множество форм (в виде полостей для приема теста). Нож 3 продолжается между концами 31, 32 по формовочному валику 4 (Фиг. 2) и соскабливает избыточное тесто с поверхности формовочного валика 4. На Фиг. 1 показано положение соскабливания ножа 3, который продолжается в зазор между формовочным валиком 4 и подающим валиком 5. В неактивном положении нож 3 будет находиться на расстоянии от формовочного валика 4. Перемещение между положением соскабливания и неактивным положением указано двойной стрелкой на Фиг. 1.
Бункер 27 предусмотрен для подачи теста на валики 4, 5, а (резиновый) ремень 28 предусмотрен для приема формованных кусков теста из форм, образованных в поверхности формовочного валика 4.
На Фиг. 2 показано приводное средство для перемещения ножа 3 между положением соскабливания, в котором нож 3 примыкает (или почти примыкает) краем к формовочному валику 4 и неактивным положением, в котором нож 3 находится на расстоянии от формовочного валика 4. Приводное средство содержит первый привод 1, воздействующий на первый конец 31 ножа 3, и второй привод 2, воздействующий на второй конец 32 ножа 3. Первый привод 1 и второй привод 2 можно приводить в действие независимо друг от друга. Первый привод 1 и второй привод 2 содержат исполнительный механизм, предпочтительно, двигатель или цилиндр. В предпочтительном варианте приводами 1, 2 являются шпиндельные приводы.
Первый привод воздействует на первый конец 31 ножа 3, вызывая перемещение первого конца 31 ножа по первой линии перемещения, а второй привод 2 воздействует на второй конец 32 ножа 3, вызывая перемещение второго конца 32 ножа по второй линии перемещения, при этом первая линия перемещения и вторая линия перемещения по существу параллельны друг другу. Как будет описано ниже, (первая и вторая) линии перемещения предпочтительно определены направляющими 21, 22.
Предпочтительно нож 3 непрерывно регулируется приводами 1, 2 между положением соскабливания и неактивным положением. Во время процедуры регулирования ножа 3 относительно формовочного валика 4 первый конец 31 ножа 3 и второй конец 32 ножа 3 можно регулировать независимо друг от друга и на любом этапе работы.
Из предпочтительного варианта на Фиг. 4 видно, что вращающаяся тестоформовочная машина 10 может содержать устройство 9 управления, которое взаимодействует с первым приводом 1 и вторым приводом 2, при этом приводы 1, 2 можно привести в действие устройством 9 управления автоматически и/или в зависимости от команд, создаваемых с помощью интерфейса 8 оператора.
Из вариантов, показанных на Фиг. 2 – 6, видно, что вращающаяся тестоформовочная машина 10 может содержать:
- первый датчик 11, определяющий перемещение и/или положение первого конца 31 ножа 3, и/или нагрузку, действующую на первый конец 31 ножа 3, и
- второй датчик 12, определяющий перемещение и/или положение второго конца 32 ножа 3, и/или нагрузку, действующую на второй конец 32 ножа 3.
На Фиг. 4 показано, что первый датчик 11 и второй датчик 12 могут взаимодействовать с устройством 9 управления, при этом устройство 9 управления может управлять приводами 1, 2 в зависимости от значений, измеренных датчиками 11, 12, и/или отображать на интерфейсе 8 оператора значения, полученные датчиками 11, 12.
В предпочтительном варианте Фиг. 2 нож 3 продолжается между первым участком 13 рамы и вторым участком 14 рамы. Участки 13, 14 рамы принадлежат одной и той же раме, которая поддерживает ролики 4, 5 с возможностью вращения. Первый конец 31 ножа 3 поддерживается первой опорой 15, которая прикреплена с возможностью вращения к первому участку 13 рамы и присоединена к первому приводу 1. Второй конец 32 ножа 3 поддерживается второй опорой 16, которая прикреплена с возможностью вращения ко второму участку 14 рамы и присоединена ко второму приводу 2. Здесь первая опора 15 продолжается через первый участок 13 рамы, и вторая опора 16 продолжается через второй участок 14 рамы (обозначенный пунктирными линиями).
Каждая опора 15, 16 может иметь внутренний участок 17, 19, обращенный к ножу 3, и наружный участок 18, 20, отделенный в пространственном отношении от ножа 3 соответствующим участком 13, 14 рамы, при этом внутренний участок 17, 19 и наружный участок отделяются друг от друга, предпочтительно ослаблением, по меньшей мере, одного винта (не показан). Каждый привод 1, 2 присоединен к наружному участку 18, 20 соответствующей опоры 15, 16. Как видно из Фиг. 2 первый привод 1 отделен в пространственном отношении от ножа 3 первым участком 13 рамы, а второй привод 2 отделен в пространственном отношении от ножа 3 вторым участком 14 рамы. Другими словами, приводы 1, 2 расположены снаружи пространства между участками 13, 14 рамы.
Предпочтительно, нож свободно расположен (т.е., с возможностью снятия без крепежного средства) на первой опоре 15 и на второй опоре 16, предпочтительно, конструкцией, соответствующей форме, может быть углубление в опоре.
Чтобы определить путь перемещения ножа, первый участок 13 рамы образует первую направляющую 21 (здесь: направляющую с пазами), в которой установлена первая опора 15 с возможностью перемещения скольжением. Второй участок 14 рамы образует вторую направляющую 22, (здесь: направляющую с пазами), в которой установлена вторая опора 16 с возможностью перемещения скольжением. Направляющие 21, 22 могут иметь дугообразную траекторию, чтобы оптимально доставить нож 3 к формовочному валику 4.
Каждая опора 15, 16 может сообщаться с соответствующей направляющей 21, 22 посредством, по меньшей мере, одного (здесь: нескольких) скользящего диска 7, предпочтительно выполненного из пластика, вставленного между опорой 15, 16 и направляющей 21, 22 (Фиг. 6). Углубления могут быть выполнены в опоре 15, 16 или в направляющей 21, 22 для приема скользящего диска (скользящих дисков).
В показанном варианте приводы 1, 2 являются линейными приводами. Первый привод прикреплен с возможностью поворота к первому участку 13 рамы и прикреплен с возможностью поворота к первой опоре 15. Второй привод прикреплен с возможностью поворота ко второму участку 14 рамы и прикреплен с возможностью поворота ко второй опоре 16.
Из Фиг. 5 видно, что нож образован основанием 24 и лезвием 23, прикрепленным к основанию. В показанном варианте основание имеет концевые участки 25, 26, продолжающиеся за лезвие 23. Каждый привод 1, 2 действует на соответствующий концевой участок 25, 26 основания 24.
Следует понимать, что изобретение не ограничивается вышеизложенными вариантами, и возможны комбинации различных вариантов. Например, также можно использовать вращающиеся приводы (вместо линейных приводов). Соединение между каждым приводом и соответствующим концом ножа может отличаться и содержать другие передаточные элементы, как в показанных вариантах. Также возможно, чтобы приводы непосредственно действовали на концы ножа. Альтернативно приводы могут находиться на внутренней стороне участков рамы. Перемещение ножа из положения соскабливания в неактивное положение может иметь дугообразную траекторию, линейную траекторию, или любую другую траекторию, или может содержать вращательный компонент. Альтернативно направляющей с пазами внутри рамы также возможна направляющая конструкция, прикрепленная к раме. Возможно любое крепление, позволяющее перемещение ножа между положением соскабливания и неактивным положением. (Первым и вторым) датчиками могут быть шифраторы (линейные или углового положения), датчик давления и/или силы (например, содержащие, по меньшей мере, один пьезоэлектрический элемент или тензодатчик), бесконтактные датчики (например, оптический или емкостной или индукционный датчик) и т.д. На самом деле вращающаяся тестоформовочная машина может иметь больше или меньше частей, чем показано на фигурах. Машина и ее части также могут быть показаны в разных масштабах и могут быть больше или меньше показанных на фигурах. Наконец, описание может содержать существо дополнительных независимых изобретений.
Список позиций на чертежах
1 первый привод
2 второй привод
3 нож
4 формовочный валик
5 подающий валик
6 рама
7 скользящий диск
8 интерфейс оператора
9 устройство управления
10 вращающаяся тестоформовочная машина
11 первый датчик
12 второй датчик
13 первый участок рамы
14 второй участок рамы
15 первая опора
16 вторая опора
17 внутренний участок первой опоры 15
18 наружный участок первой опоры 15
19 внутренний участок второй опоры 16
20 наружный участок второй опоры 16
21 первая направляющая
22 вторая направляющая
23 лезвие
24 основание
25 концевой участок основания 24
26 концевой участок основания 24
27 бункер
28 ремень
1 первый конец ножа 3
2 Второй конец ножа 3.
Реферат
Изобретение относится к устройствам для пищевой промышленности. Вращающаяся тестоформовочная машина (10) содержит: раму (6), формовочный валик (4), прикрепленный к раме (6) с возможностью вращения, нож (3) для соскабливания теста с формовочного валика (4), упомянутый нож (3) продолжается по формовочному валику (4), приводное средство для перемещения ножа (3) между положением соскабливания и неактивным положением. При этом первый привод (1), воздействующий на первый конец (31) ножа (3), и второй привод (2), воздействующий на второй конец (32) ножа (3), при этом первый привод (1) и второй привод (2) можно привести в действие независимо друг от друга. Способ управления вращающейся тестоформовочной машиной (10) предусматривает регулирование ножа (3) относительно формовочного валика (4), при этом первый конец (31) ножа (3) и второй конец (32) ножа (3) регулируются независимо друг от друга. Изобретение позволяет получить простую конструкцию, которая предусматривает оптимальное регулирование ножа относительно формовочного валика, а также соответствие гигиеническим требованиям при использовании тестоформовочной машины. 2 н. и 13 з.п. ф-лы, 6 ил.
Комментарии