Гидравлический привод пневмоколесного экскаватора - RU2641049C1
Код документа: RU2641049C1
Чертежи
Описание
Изобретение относится к области машиностроения, а именно к экскаваторам на пневмоколесном ходу с гидравлическим приводом.
Известен гидравлический привод хода пневмоколесного экскаватора (патент RU 2272107 С1), содержащий силовые насосы, гидромоторы, гидроаппаратуру, включающую гидрораспределитель с адресным золотником хода, контур сервоуправления. Для безотказного включения передач «с места» в гидравлическом приводе применен дополнительный контур, состоящий из блока управления, гидролиний сервоуправления и логического гидроклапана ИЛИ с двумя входными и одним выходным отводами. Недостатком известного гидравлического привода является малая функциональность (дополнительный контур используется только для включения передач «с места»).
Также известен гидравлический привод пневмоколесного экскаватора (см. Раннев А.В. Одноковшовые строительные экскаваторы. М., Высшая школа, 1991 г., Экскаватор ЭО-3323, стр. 109-112), выбранный в качестве прототипа, содержащий насос, гидрораспределитель с адресными золотником хода и адресным золотником опор-отвала, гидромотор хода, переключающий распределитель опор-отвала (в виде пневмогидравлического клапана), гидроцилиндры опор и отвала, систему сервоуправления. Управление функциями хода и опорами-отвалом осуществляется от ручных блоков управления с рукоятками. Переключение функций опор и отвала осуществляется посредством переключающего распределителя.
Существенным недостатком прототипа является низкое удобство управления экскаватором, обусловленное высокой функциональной загруженностью рук оператора, так как во время передвижения одна рука оператора постоянно находится на рукоятке блока управления ходом, при этом на рулевом колесе постоянно задействована другая рука, что приводит к утомляемости оператора и повышает риски аварии в экстремальных дорожных условиях. Вторым существенным недостатком является невозможность одновременного использования ручных блоков управления для операций хода и отвала (например, для регулировки положения отвала в процессе движения экскаватора при выполнении планировочных работ, засыпке траншей и т.п.), так как одна рука задействована на рулевом колесе, а второй рукой невозможно оперировать сразу двумя рукоятками блоков управления хода и опор-отвала. Замена ручных блоков управления на однофункциональные педальные блоки могла бы решить указанные проблемы, однако ввиду большого количества команд («опоры подъем», «опоры опускание», «отвал подъем», «отвал опускание», «ход вперед», «ход назад»), это требует установки в кабине экскаватора, по меньшей мере, шести педальных блоков, что абсолютно неприемлемо как с компоновочной, так и с эргономической точек зрения.
Целью настоящего изобретения является создание гидравлического привода пневмоколесного экскаватора, обеспечивающего снижение функциональной загруженности рук оператора экскаватора в процессе работы с обеспечением выполнения требований по эргономике.
Техническим результатом, достигаемым при реализации предлагаемого изобретения, является снижение утомляемости, повышение комфортности и безопасности работы оператора. Другой технический результат заключается в обеспечении возможности одновременного управления функциями хода и отвала (например, для регулировки положения отвала в процессе движения экскаватора при выполнении планировочных работ, засыпке траншей и т.п.), то есть в повышении функциональных возможностей экскаватора.
Указанный совокупный технический результат достигается тем, что в гидравлическом приводе пневмоколесного экскаватора, содержащем насос, гидрораспределитель с адресными золотником хода и адресным золотником опор-отвала, гидромотор хода, переключающий распределитель опор-отвала, гидроцилиндры опор и отвала, систему сервоуправления, согласно изобретению в систему сервоуправления включен дополнительный контур, состоящий из двух педальных блоков управления и обеспечивающих возможность выполнения посредством каждого из упомянутых педальных блоков управления, по крайней мере, двух функций, гидроклапана ИЛИ с двумя входными и одним выходным отводами и двух электрогидравлических распределителей с двумя выходными и одним входным отводами каждый, при этом первый педальный блок управления соединен с первым входным отводом гидроклапана ИЛИ, второй педальный блок управления соединен со вторым входным отводом гидроклапана ИЛИ, гидромотором хода и переключающим распределителем, выходной отвод гидроклапана ИЛИ соединен с входными отводами обоих электрогидравлических распределителей, выходные отводы первого электрогидравлического распределителя соединены с адресным золотником хода, а выходные отводы второго электрогидравлического распределителя соединены с адресным золотником опор-отвала.
Заявленные технические признаки существенны, так как они влияют на достигаемый технический результат.
При изучении других известных технических решений признаки, отличающие заявленное техническое решение, не были выявлены. Это позволяет сделать вывод о том, что заявленное техническое решение обладает новизной и не следует явным образом из существующего уровня техники.
Предлагаемое техническое решение может быть применено в промышленности, при производстве пневмоколесных экскаваторов.
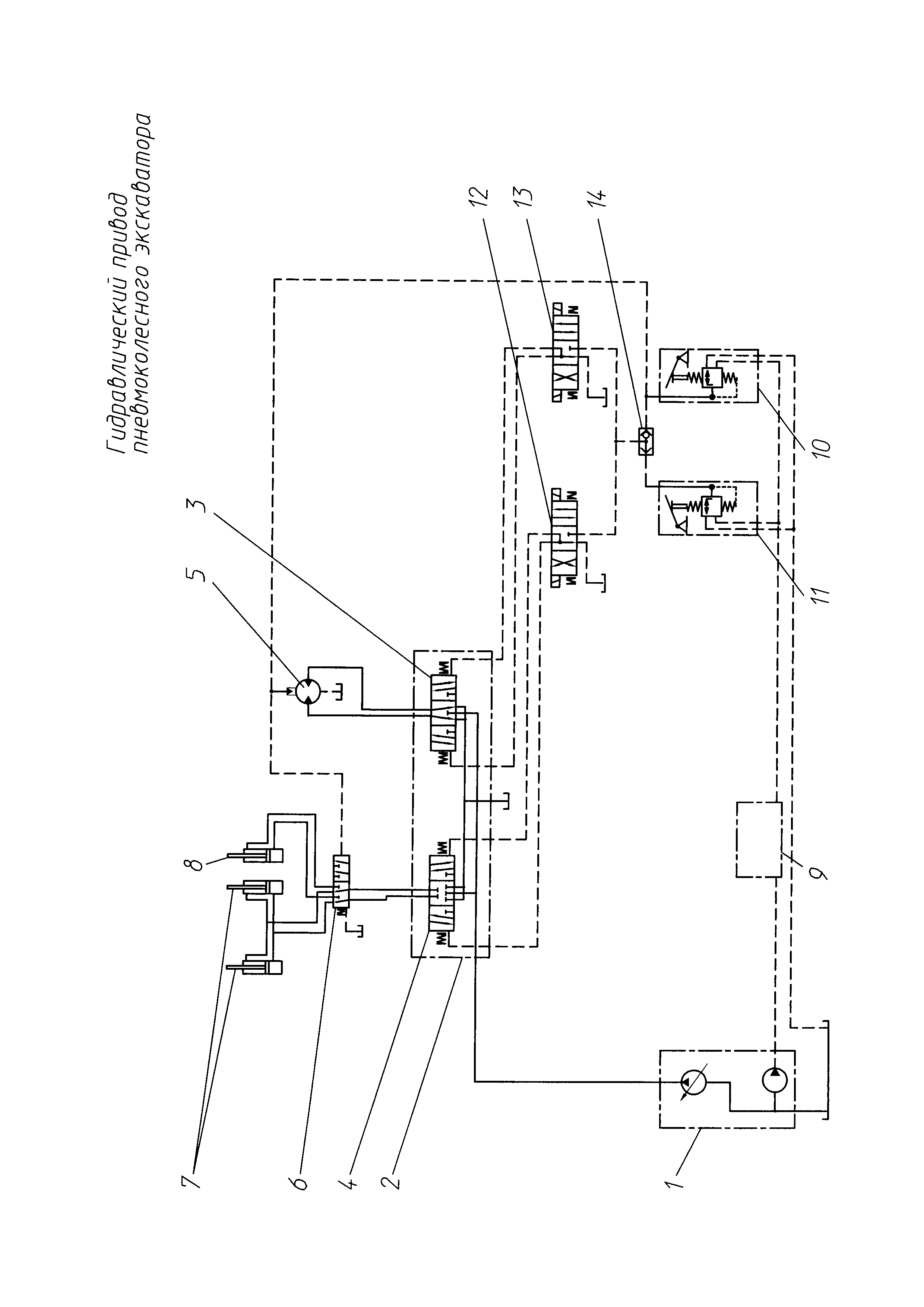
Сущность изобретения поясняется чертежом, где изображена принципиальная схема гидравлического привода пневмоколесного экскаватора.
Гидравлический привод пневмоколесного экскаватора содержит насос 1, гидрораспределитель 2 с адресными золотником 3 хода и адресным золотником 4 опор-отвала, гидромотор 5 хода, переключающий распределитель 6 опор-отвала, гидроцилиндры 7 опор и гидроцилиндр 8 отвала, систему 9 сервоуправления, в которую включен дополнительный контур, состоящий из двух педальных блоков 10 и 11 управления, двух электрогидравлических распределителей 12 и 13, гидроклапана 14 ИЛИ.
Работа гидравлического привода.
Начало передвижения экскаватора осуществляется следующим образом. После включения передачи в коробке передач и задания направления передвижения («ход вперед» или «ход назад») посредством электрогидравлического распределителя 13 оператор нажимает педаль педального блока 10. Рабочая жидкость через педальный блок 10, гидроклапан 14 ИЛИ, электрогидравлический распределитель 13 поступает к адресному золотнику 3 хода и перемещает его в соответствующее положение («ход вперед» или «ход назад»). При этом рабочая жидкость через педальный блок 10 поступает к гидромотору 5 хода, переводя его в режим минимальной скорости вращения. Одновременно рабочая жидкость от насоса 1 через адресный золотник 3 гидрораспределителя 2 поступает к гидромотору 5, приводя его во вращение. Затем крутящий момент от гидромотора 5 через коробку передач передается на колеса. Экскаватор начинает медленное движение, что является признаком включившейся передачи.
Для осуществления перемещения экскаватора на рабочей скорости (максимальной скорости для включенной передачи) оператор нажимает педаль педального блока 11 и отпускает педаль педального блока 10. Рабочая жидкость через педальный блок 11, гидроклапан 14 ИЛИ, электрогидравлический распределитель 13 поступает к адресному золотнику 3 хода и фиксирует его положение, заданное при предшествующем нажатии педали педального блока 10 управления (как описано выше). После отпускания педали педального блока 10 рабочая жидкость от него перестает поступать к гидромотору 5 хода, в связи с чем гидромотор автоматически переводится в режим максимальной скорости вращения. При этом рабочая жидкость от насоса 1 через адресный золотник 3 гидрораспределителя 2 поступает к гидромотору 5 хода, приводя его во вращение. Крутящий момент от гидромотора 5 через коробку передач передается на колеса. Экскаватор увеличивает скорость до максимальной, установленной для включенной передачи.
Функционирование опор осуществляется следующим образом. После включения направления работы опор («опоры подъем» или «опоры опускание») посредством электрогидравлического распределителя 12, оператор нажимает педаль педального блока 11. Рабочая жидкость через педальный блок 11, гидроклапан 14 ИЛИ, электрогидравлический распределитель 12 поступает к адресному золотнику 4 опор-отвала и перемещает его в соответствующее положение («опоры подъем» или «опоры опускание»). Одновременно рабочая жидкость от насоса 1 через адресный золотник 4 гидрораспределителя 2 и через переключающий распределитель 6 опор-отвала поступает к гидроцилиндрам 7 опор, приводя их в движение. Происходит подъем или опускание опор.
Функционирование отвала осуществляется следующим образом. Для задания направления работы отвала («отвал подъем» или «отвал опускание»), также как для опор, используется электрогидравлический распределитель 12. После включения направления работы отвала («отвал подъем» или «отвал опускание») посредством электрогидравлического распределителя 12 оператор нажимает педаль педального блока 10. Рабочая жидкость через педальный блок 10, гидроклапан 14 ИЛИ, электрогидравлический распределитель 12 поступает к адресному золотнику 4 опор-отвала и перемещает его в соответствующее положение («отвал подъем» или «отвал опускание»). Одновременно рабочая жидкость через педальный блок 10 поступает к переключающему распределителю 6 опор-отвала, переводя его в режим «отвал». Кроме того, рабочая жидкость от насоса 1 через адресный золотник 4 гидрораспределителя 2 и через переключающий распределитель 6 опор-отвала поступает к гидроцилиндру 8 отвала, приводя его в движение.
Происходит подъем или опускание отвала. После отпускания педали педального блока 10 управления рабочая жидкость от него перестает поступать к переключающему распределителю 6 опор-отвала, в связи с чем распределитель 6 автоматически переводится в режим «опоры».
Функционирование отвала во время передвижения экскаватора осуществляется следующим образом. После включения передачи в коробке передач и задания направления передвижения («ход вперед» или «ход назад») посредством электрогидравлического распределителя 13 оператор нажимает педаль педального блока 10. Рабочая жидкость через педальный блок 10, гидроклапан 14 ИЛИ, электрогидравлический распределитель 13 поступает к адресному золотнику 3 хода и перемещает его в соответствующее положение («ход вперед» или «ход назад»). При этом рабочая жидкость через педальный блок 10 управления поступает к гидромотору 5 хода, переводя его в режим минимальной скорости вращения. В то же время рабочая жидкость от насоса 1 через адресный золотник 3 гидрораспределителя 2 поступает к гидромотору 5 хода, приводя его во вращение. Крутящий момент от гидромотора 5 через коробку передач передается на колеса. Экскаватор начинает медленное движение («тихий ход»). При необходимости поднятия или опускания отвала во время передвижения оператор включает электрогидравлический распределитель 12 в положение «отвал подъем» или «отвал опускание». Рабочая жидкость через педальный блок 10, гидроклапан 14 ИЛИ, электрогидравлический распределитель 12 поступает к адресному золотнику 4 опор-отвала и перемещает его в соответствующее положение («отвал подъем» или «отвал опускание»). Одновременно рабочая жидкость от насоса 1 через адресный золотник 4 гидрораспределителя 2 и через переключающий распределитель 6 опор-отвала поступает к гидроцилиндру 8 отвала, приводя его в движение. Происходит подъем или опускание отвала. Для прекращения подъема или опускания отвала необходимо выключить электрогидравлический распределитель 12, при этом экскаватор будет продолжать передвигаться, пока включен электрогидравлический распределитель 13 и нажата педаль педального блока 10 управления. Таким образом, обеспечивается возможность совмещения операций хода и отвала (для регулировки положения отвала на ходу при выполнении планировочных работ, засыпке траншей и т.п.), в результате чего повышается функциональность экскаватора.
Включение электрогидравлических распределителей 12 и 13 осуществляется, например, от тумблеров с фиксацией положения расположенных, например, на пульте рядом с рулевым колесом или непосредственно на рулевой колонке, что существенно снижает уровень задействования рук оператора при управлении ходом и опорами-отвалом. Нажатие педалей педальных блоков 10 и 11 управления осуществляется ногами, ими же обеспечивается плавность включения функций хода и опор-отвала.
Включение в систему сервоуправления гидравлического привода пневмоколесного экскаватора двух электрогидравлических распределителей 12 и 13 и гидроклапана 14 ИЛИ позволяет обеспечить многофункциональность педальных блоков 10 и 11 управления, при этом педальный блок 11 управления обеспечивает выполнение функций хода («ход вперед» или «ход назад») и опор («опоры подъем» или «опоры опускание»), а педальный блок 10 управления обеспечивает выполнение функций медленного хода («тихий ход») и отвала («отвал подъем» или «отвал опускание»).
Передача выполнения определенных функций от ручных блоков управления многофункциональным педальным блокам управления обеспечивает снижение функциональной загруженности рук оператора экскаватора в процессе работы и, как следствие, снижение утомляемости оператора, повышение комфортности и безопасности.
Установка двух педальных блоков управления в кабине оператора экскаватора не занимает много места и, следовательно, конструктивно осуществима и не влечет ухудшения эргономики.
Реферат
Изобретение относится к области машиностроения и может быть использовано при создании экскаваторов на пневмоколесном ходу с гидравлическим приводом. Сущность изобретения заключается в том, что в известном гидравлическом приводе пневмоколесного экскаватора, в систему сервоуправления включен дополнительный контур, состоящий из двух педальных блоков управления и обеспечивающих возможность выполнения посредством каждого из них, по крайней мере, двух функций гидроклапана ИЛИ с двумя входными и одним выходным отводами и двух электрогидравлических распределителей с двумя выходными и одним входным отводами каждый. Первый педальный блок управления соединен с первым входным отводом гидроклапана ИЛИ, второй педальный блок управления соединен со вторым входным отводом гидроклапана ИЛИ, гидромотором хода и переключающим распределителем, выходной отвод гидроклапана ИЛИ соединен с входными отводами обоих электрогидравлических распределителей, выходные отводы первого электрогидравлического распределителя соединены с адресным золотником хода, а выходные отводы второго электрогидравлического распределителя соединены с адресным золотником опор-отвала. Технический результат заключается в снижении утомляемости, повышении комфортности и безопасности работы оператора, а также в повышении функциональных возможностей экскаватора. 1 ил.
Комментарии