Строительное транспортное средство - RU2390679C2
Код документа: RU2390679C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к строительному транспортному средству.
Уровень техники
Движение некоторых строительных транспортных средств обеспечивается за счет гидравлического насоса, приводимого в действие двигателем, и ходового гидромотора, приводимого в действие маслом под давлением, нагнетаемым из гидравлического насоса. В строительном транспортном средстве такого типа регулирование скорости и тягового усилия транспортного средства может осуществляться путем регулирования скорости вращения двигателя, производительности гидравлического насоса и производительности гидромотора (Патентный документ 1).
[Патентный документ 1] публикация заявки на патент Японии JP-A-2004-144254.
Характеристика зависимости тягового усилия от скорости транспортного средства, получаемая в указанном выше строительном транспортном средстве, представлена на фиг.9. По горизонтальной оси на фиг.9 отложены значения скорости транспортного средства, а по вертикальной оси - значения тягового усилия. Как показано на этой характеристике зависимости тягового усилия от скорости транспортного средства, пик тягового усилия достигается не при нулевой скорости транспортного средства, а при скорости транспортного средства в диапазоне малых скоростей. Поэтому в случае выполнения экскаваторных работ на дороге с низким трением, типа дороги с мягким грунтом или дороги, покрытой снегом, во время работы при низкой скорости тяговое усилие достигает максимума, и ходовые колеса легко срываются в пробуксовку.
Цель настоящего изобретения заключается в создании строительного транспортного средства с возможностью снижения риска срыва в скольжение.
Строительное транспортное средство согласно первому аспекту изобретения включает в себя двигатель, гидравлический насос, приводимый в действие двигателем, ходовой гидромотор, приводимый в действие маслом под давлением, нагнетаемым гидравлическим насосом, ходовое колесо, приводимое в действие движущей силой ходового гидромотора, блок регулирования, обеспечивающий регулирование скорости и тягового усилия транспортного средства за счет регулирования скорости вращения двигателя, производительности гидравлического насоса и производительности гидромотора, и блок измерения скорости транспортного средства для измерения скорости транспортного средства. При этом в диапазоне малых скоростей, в котором скорость транспортного средства меньше или равна заданной скорости, блок регулирования может работать в режиме снижения проскальзывания для снижения максимальной скорости вращения двигателя по мере уменьшения скорости транспортного средства.
В этом строительном транспортном средстве в режиме снижения проскальзывания осуществляется регулирование максимальной скорости вращения двигателя, обеспечивающее ее снижение по мере уменьшения скорости транспортного средства. Это позволяет получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента. Транспортное средство, на котором установлен преобразователь крутящего момента, имеет характеристику зависимости тягового усилия от скорости транспортного средства, на которой тяговое усилие достигает максимума при скорости транспортного средства, равной нулю. Поэтому получение такой аппроксимированной характеристики зависимости тягового усилия от скорости транспортного средства позволяет предотвратить легкое срывание транспортного средства в скольжение даже на дороге с низким трением. В результате появляется возможность снижения риска срыва такого строительного транспортного средства в скольжение.
Строительное транспортное средство согласно второму аспекту изобретения включает в себя двигатель, гидравлический насос, приводимый в действие двигателем, ходовой гидромотор, приводимый в действие маслом под давлением, нагнетаемым гидравлическим насосом, ходовое колесо, приводимое в действие движущей силой ходового гидромотора, и блок регулирования, обеспечивающий регулирование скорости и тягового усилия транспортного средства за счет регулирования скорости вращения двигателя, производительности гидравлического насоса и производительности гидромотора. При этом блок регулирования может работать в режиме снижения проскальзывания для регулирования максимальной скорости вращения двигателя так, что характеристика зависимости тягового усилия от скорости транспортного средства аппроксимируется характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента.
В этом строительном транспортном средстве в режиме снижения проскальзывания осуществляется регулирование максимальной скорости вращения двигателя. Это позволяет получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента. Транспортное средство, на котором установлен преобразователь крутящего момента, имеет характеристику зависимости тягового усилия от скорости транспортного средства, на которой тяговое усилие достигает максимума при скорости транспортного средства, равной нулю. Поэтому получение такой аппроксимированной характеристики зависимости тягового усилия от скорости транспортного средства позволяет предотвратить легкое срывание транспортного средства в скольжение даже на дороге с низким трением. В результате появляется возможность снижения риска срыва такого строительного транспортного средства в скольжение.
Строительное транспортное средство согласно третьему аспекту изобретения является строительным транспортным средством согласно второму изобретению, в котором в режиме снижения проскальзывания блок регулирования регулирует максимальную скорость вращения двигателя так, что характеристика зависимости тягового усилия от скорости транспортного средства аппроксимируется монотонно убывающей функцией.
В этом строительном транспортном средстве в режиме снижения проскальзывания осуществляется регулирование максимальной скорости вращения двигателя. Это позволяет получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную монотонно убывающей функцией. Поэтому максимальное тяговое усилие вырабатывается при скорости транспортного средства, соответствующей нулю или близкой к нулю. В результате появляется возможность снижения риска срыва такого строительного транспортного средства в скольжение.
Строительное транспортное средство согласно четвертому аспекту изобретения является строительным транспортным средством согласно первому изобретению или второму изобретению, в котором в режиме снижения проскальзывания блок регулирования регулирует максимальную скорость вращения двигателя так, что максимальное тяговое усилие на характеристике зависимости тягового усилия от скорости транспортного средства вырабатывается при более низкой скорости, чем скорость, при которой вырабатывается максимальное тяговое усилие на характеристике зависимости тягового усилия от скорости транспортного средства в случае работы не в режиме снижения проскальзывания.
В этом строительном транспортном средстве максимальное тяговое усилие вырабатывается при более низкой скорости, чем скорость, при которой максимальное тяговое усилие вырабатывается в случае работы не в режиме снижения проскальзывания. Поэтому появляется возможность снижения риска срыва такого строительного транспортного средства в скольжение даже по сравнению со случаем, когда максимальная скорость вращения двигателя задана постоянной.
Строительное транспортное средство согласно пятому аспекту изобретения является строительным транспортным средством согласно второму изобретению, дополнительно включающим в себя блок измерения скорости транспортного средства для измерения скорости транспортного средства. При этом в режиме снижения проскальзывания блок регулирования определяет максимальную скорость вращения двигателя по измеренной скорости транспортного средства.
В этом строительном транспортном средстве максимальная скорость вращения двигателя определяется по измеренной скорости транспортного средства. Поэтому простое регулирование позволяет получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента.
Строительное транспортное средство согласно шестому аспекту изобретения является строительным транспортным средством согласно пятому аспекту изобретения, в котором в режиме снижения проскальзывания блок регулирования снижает максимальную скорость вращения двигателя по мере уменьшения скорости транспортного средства.
В этом строительном транспортном средстве в режиме снижения проскальзывания максимальная скорость вращения двигателя снижается по мере уменьшения скорости транспортного средства. Таким образом, при режиме снижения скольжения осуществляется регулирование максимальной скорости вращения двигателя. Такое регулирование позволяет получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента.
Строительное транспортное средство согласно седьмому аспекту изобретения является строительным транспортным средством согласно первому или второму аспекту изобретения, дополнительно включающим в себя блок выбора режима снижения проскальзывания, посредством которого оператор выбирает режим снижения проскальзывания.
В этом строительном транспортном средстве манипулирование блоком выбора режима снижения проскальзывания позволяет оператору произвольно выбирать работу в режиме или не в режиме снижения проскальзывания. Например, работа на дороге с низким трением может осуществляться в режиме снижения проскальзывания, а работа на дороге с нормальными с характеристиками - не в режиме снижения проскальзывания.
Краткое описание чертежей
Фиг.1 - вид сбоку строительного транспортного средства.
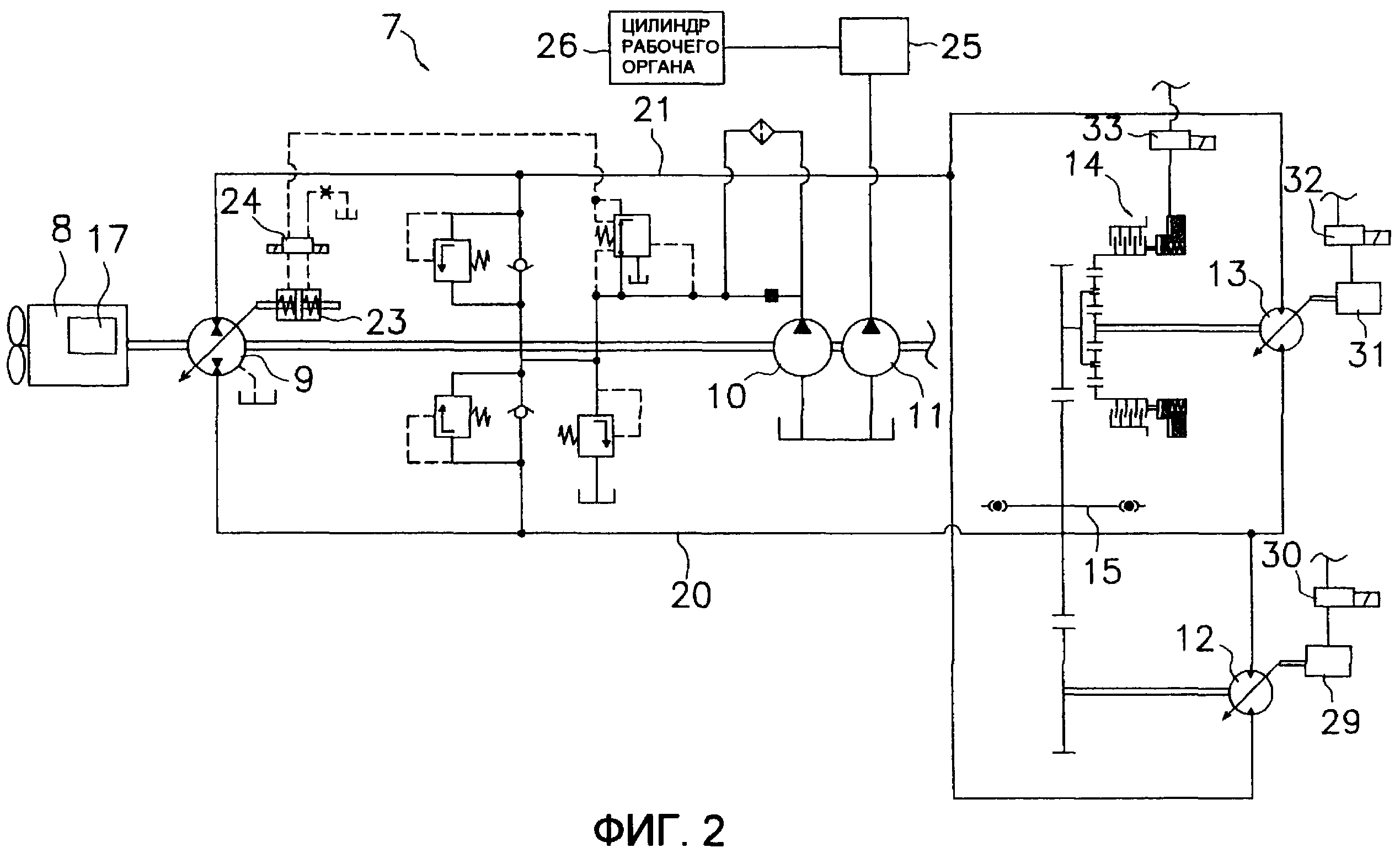
Фиг.2 - принципиальная схема конструкции механизма гидравлического привода.
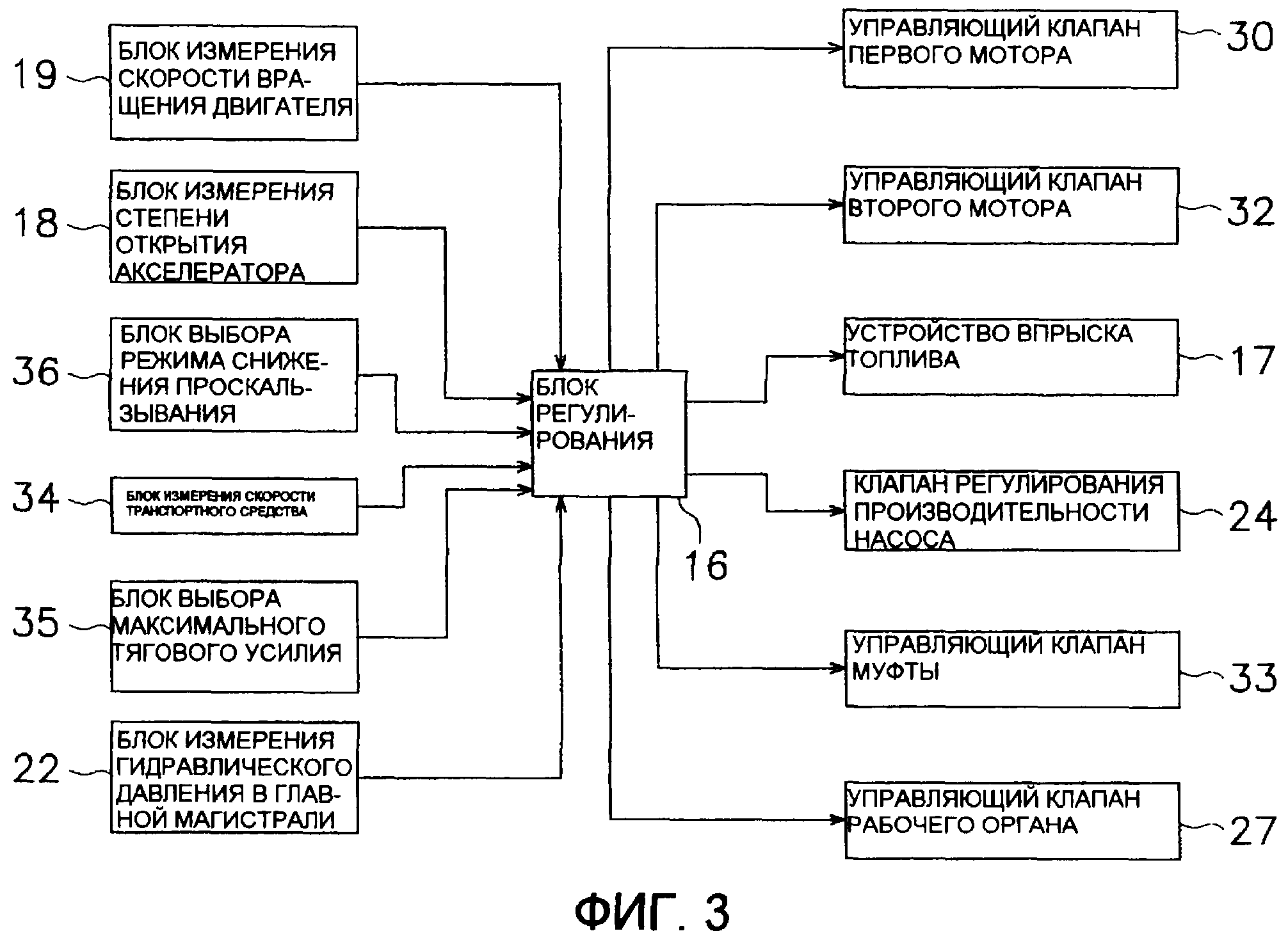
Фиг.3 - блок-схема строительного транспортного средства.
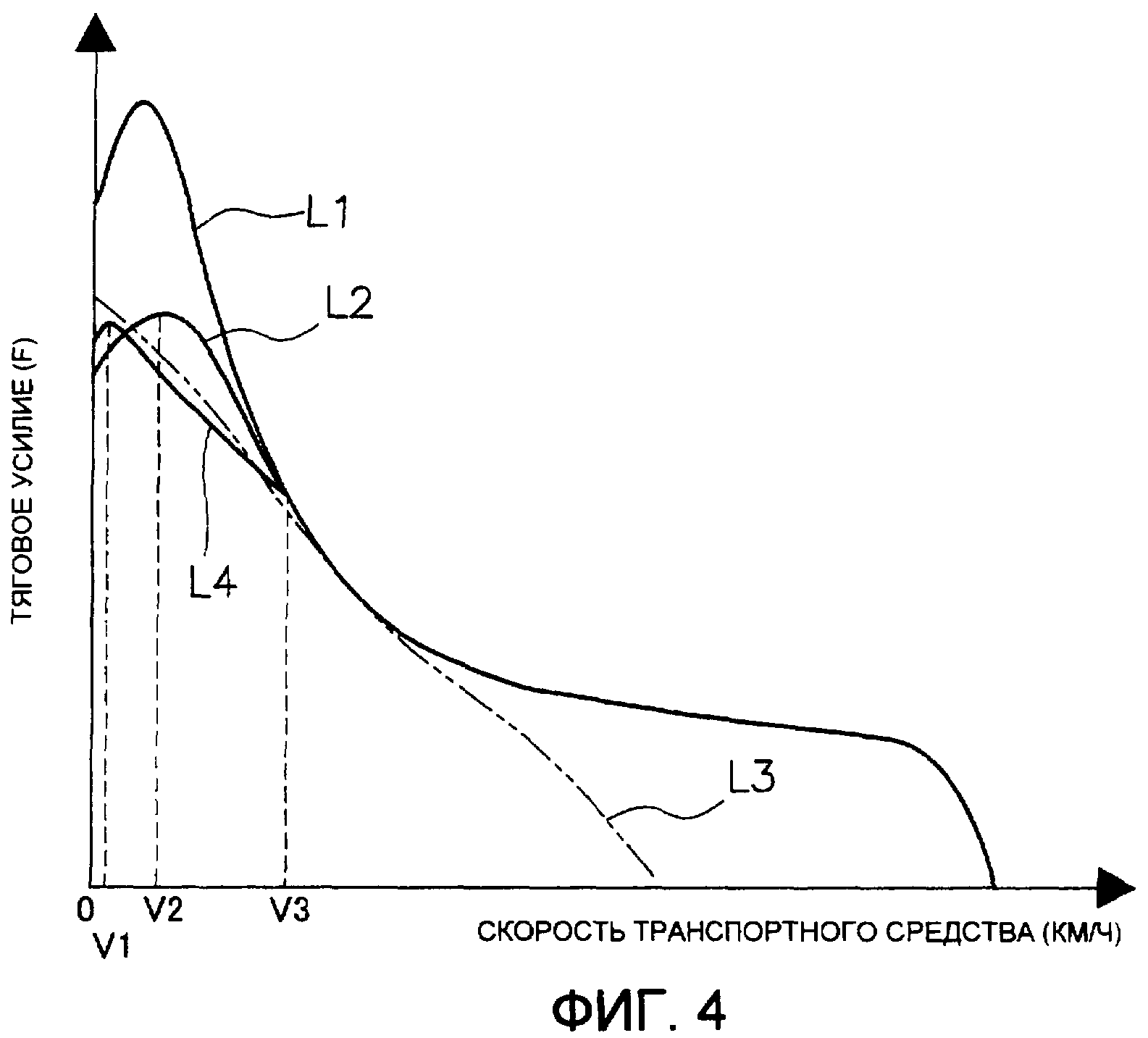
Фиг.4 - графики зависимости тягового усилия от скорости транспортного средства.
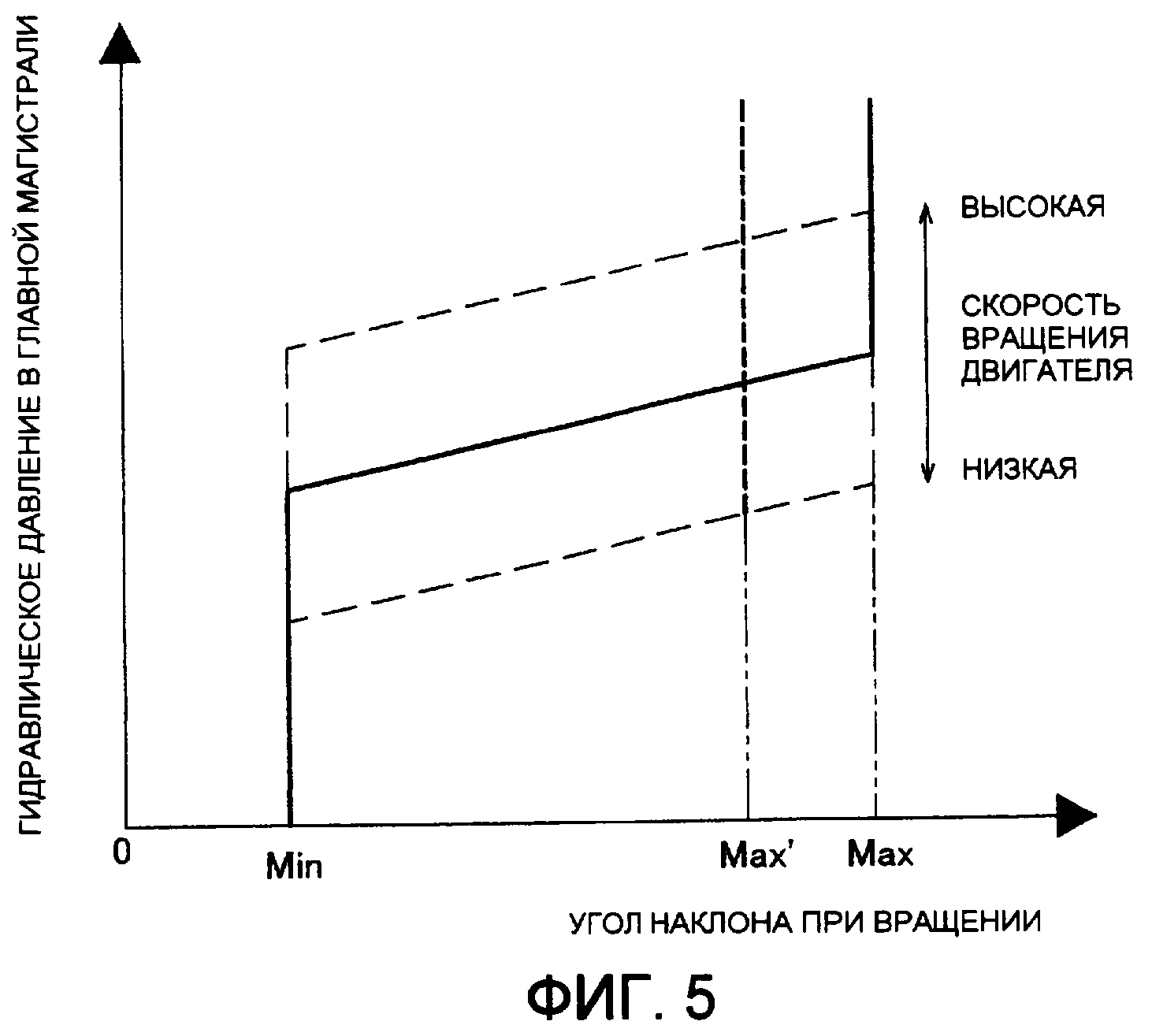
Фиг.5 - график, иллюстрирующий взаимосвязь между углом наклона при вращении, гидравлическим давлением в главной магистрали и скоростью вращения двигателя.
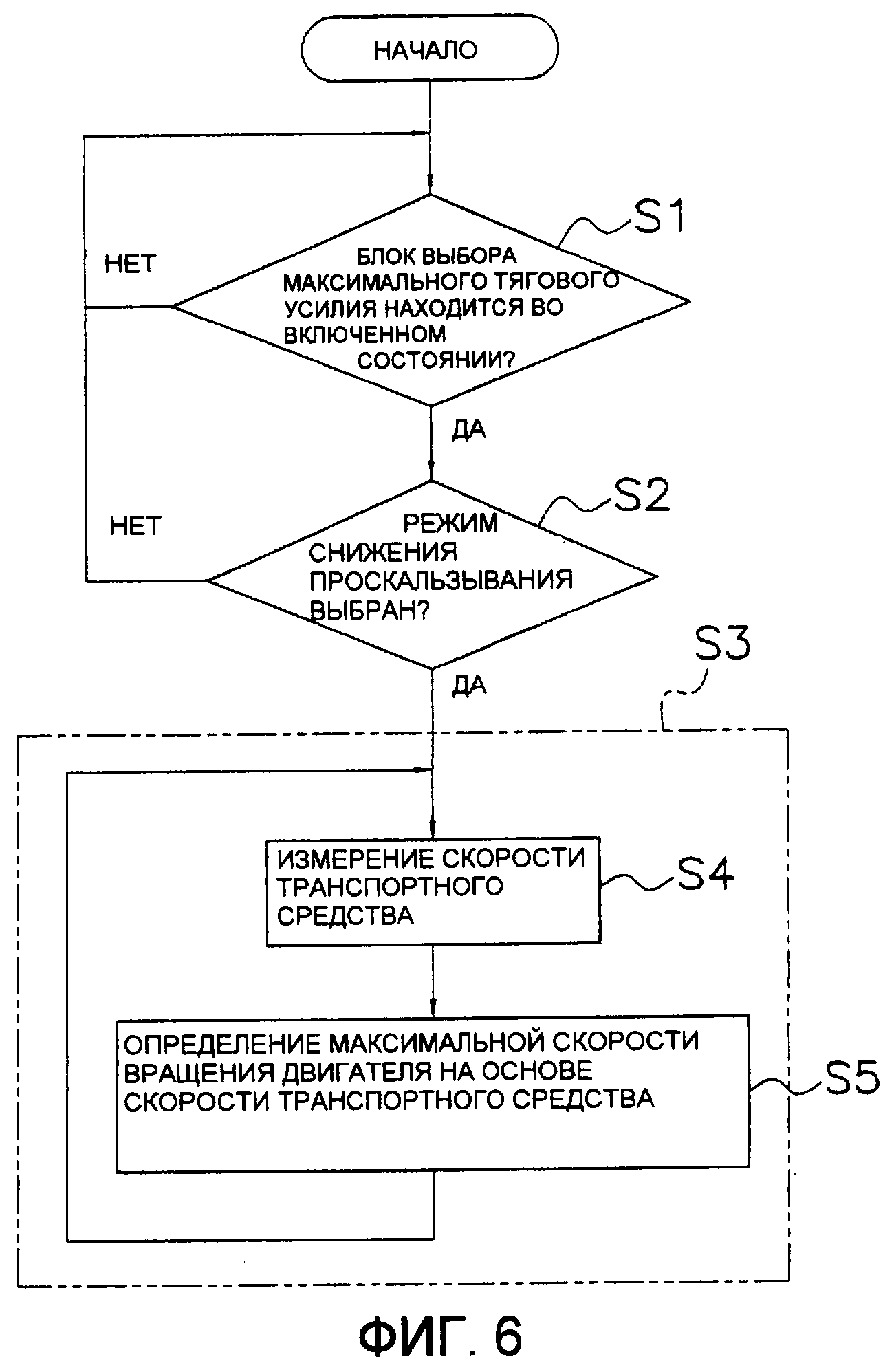
Фиг.6 - блок-схема процесса регулирования в режиме снижения проскальзывания.
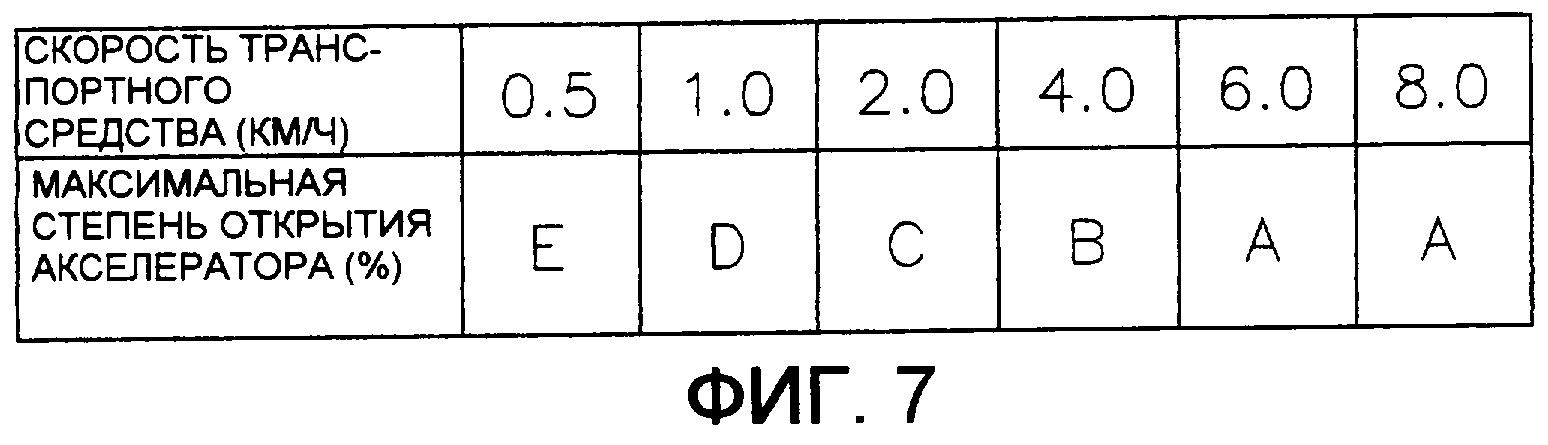
Фиг.7 - таблица значений максимальной скорости вращения двигателя в зависимости от скорости транспортного средства.
Фиг.8 - график, иллюстрирующий зависимость максимальной скорости вращения двигателя от скорости транспортного средства.
Фиг.9 - график зависимости тягового усилия от скорости транспортного средства для прототипа строительного транспортного средства.
Описание номеров позиций
1 - строительное транспортное средство
4a, 4b - шина (ходовое колесо)
8 - двигатель
9 - основной насос (гидравлический насос)
13 - второй ходовой мотор (ходовой гидромотор)
16 - блок регулирования
34 - блок измерения скорости транспортного средства
36 - блок выбора режима снижения проскальзывания
Лучший вариант осуществления изобретения
На фиг.1 представлен вид сбоку строительного транспортного средства 1 в соответствии с примером осуществления настоящего изобретения. Строительное транспортное средство 1 является самоходным автопогрузчиком с шинами 4a и 4b и рабочим органом 3 для выполнения полезной работы. Строительное транспортное средство 1 включает в себя раму 2 кузова, рабочий орган 3, шины 4a и 4b (ходовые колеса) и кабину 5 оператора.
Рама 2 кузова включает в себя переднюю раму 2a, которая размещена с передней стороны кузова, и заднюю раму 2b, размещенную с задней стороны кузова. Передняя рама 2a и задняя рама 2b соединены одна с другой в центре рамы 2 кузова с возможностью совершения качательного движения в направлении вправо-влево.
На передней раме 2a установлены рабочий орган 3 и пара передних шин 4a. Рабочий орган 3 представляет собой устройство, приводимое в действие маслом под давлением, нагнетаемым гидравлическим насосом 11 рабочего органа (см. фиг.2). Рабочий орган 3 включает в себя стрелу 37, закрепленную на переднем участке передней рамы 2a, ковш 38, закрепленный на переднем конце стрелы 37, и цилиндр 26 рабочего органа для привода этих элементов (см. фиг.2). Парные передние шины 4a установлены на боковых поверхностях передней рамы 2a.
На задней раме 2b установлены кабина 5 оператора, маслобак 6 гидросистемы, пара задних шин 4b и так далее. Кабина 5 оператора закреплена на верхнем участке рамы 2 кузова, а внутри кабины 5 оператора размещены блок управления типа рукоятки и педали управления акселератором, дисплей для отображения различной информации типа скорости, сиденье и так далее. Маслобак 6 гидросистемы установлен сзади от кабины 5 оператора. В нем хранится гидросмесь, нагнетаемая гидравлическими насосами. Парные задние шины 4b установлены на боковых поверхностях задней рамы 2b.
Кроме того, на раме 2 кузова установлен механизм 7 гидравлического привода для привода в действие шин 4a и 4b и рабочего органа 3. Ниже приводится описание конструкции механизма 7 гидравлического привода со ссылками на фиг.2.
Механизм 7 гидравлического привода
Механизм 7 гидравлического привода включает в себя в основном двигатель 8, главный насос 9 (гидравлический насос), подающий насос 10, гидравлический насос 11 рабочего органа, первый ходовой мотор 12, второй ходовой мотор 13 (ходовой гидромотор), муфту 14, ведущий вал 15 и блок 16 регулирования (см. фиг.3) и использует так называемую систему HST (гидростатической трансмиссии).
Двигатель 8 представляет собой дизельный двигатель, вырабатывающий на выходном валу крутящий момент, передаваемый на главный насос 9, подающий насос 10, гидравлический насос 11 рабочего органа, гидронасос рулевой передачи (не показанный) и подобное. На двигателе 8 установлено устройство 17 впрыска топлива для регулирования крутящего момента на выходном валу и скорости вращения двигателя 8. В соответствии с величиной воздействия на акселератор (в дальнейшем именуемым ”степень открытия акселератора”) устройство 17 впрыска топлива регулирует степень открытия акселератора (значение управляющего сигнала для скорости вращения двигателя), а также дозу впрыска топлива. Акселератор является средством подачи команды на достижение целевой скорости вращения двигателя 8, снабженным блоком 18 измерения степени открытия акселератора (см. фиг.3). Блок 18 измерения степени открытия акселератора выполнен в виде потенциометра и т.п. и предназначен для измерения степени открытия акселератора. Блок 18 измерения степени открытия акселератора передает сигнал степени открытия, соответствующий степени открытия акселератора, в блок 16 регулирования, который при этом вырабатывает управляющий сигнал, поступающий в устройство 17 впрыска топлива. Поэтому путем изменения параметра управления акселератором оператор может регулировать скорость вращения двигателя 8. Кроме того, двигатель 8 снабжен блоком 19 измерения скорости вращения двигателя (см. фиг.3), который выполнен в виде датчика вращения для измерения фактической скорости вращения двигателя 8. Сигнал скорости вращения, вырабатываемый блоком 19 измерения скорости вращения двигателя, поступает в блок 16 регулирования.
Главный насос 9 представляет собой гидравлический насос с переменной производительностью, приводимый в действие двигателем 8. Масло под давлением, нагнетаемое из главного насоса 9, направляется по главным магистралям 20 и 21 в первый ходовой мотор 12 и во второй ходовой мотор 13. При этом механизм 7 гидравлического привода снабжен блоком 22 измерения гидравлического давления в главной магистрали (см. фиг.3) для измерения давления масла под давлением (в дальнейшем именуемого “гидравлическое давление в главной магистрали”), проходящего по главным магистралям 20 и 21. При этом гидравлическое давление в главной магистрали соответствует гидравлическому давлению масла под давлением для приведения в действие первого ходового мотора 12 и второго ходового мотора 13. Кроме того, к главному насосу 9 подсоединены цилиндр 23 регулирования производительности насоса и клапан 24 регулирования производительности насоса, предназначенные для регулирования производительности главного насоса 9. Клапан 24 регулирования производительности насоса, представляющий собой электромагнитный регулирующий клапан для управления цилиндром 23 регулирования производительности насоса на основе управляющего сигнала от блока 16 регулирования, может обеспечивать произвольное изменение производительности главного насоса 9 в результате управления цилиндром 23 регулирования производительности насоса.
Подающий насос 10, приводимый в действие двигателем 8, предназначен для подачи масла под давлением в главные магистрали 20 и 21. Кроме того, подающий насос 10 обеспечивает подачу масла под давлением во вспомогательную магистраль основного насоса 9.
Гидравлический насос 11 рабочего органа приводится в действие также двигателем 8, а масло под давлением, нагнетаемое гидравлическим насосом 11 рабочего органа, направляется по гидропроводу 25 в цилиндр 26 рабочего органа 3, и приводит в действие цилиндр 26 рабочего органа. Кроме того, гидропровод 25 рабочего органа снабжен регулирующим клапаном 27 рабочего органа (см. фиг.3) для управления цилиндром 26 рабочего органа. Управление цилиндром 26 рабочего органа осуществляется в результате управления регулирующим клапаном 27 на основе управляющего сигнала от блока 16 регулирования.
Первый ходовой мотор 12 представляет собой гидромотор с переменной производительностью. Первый ходовой мотор 12 приводится в действие маслом под давлением, нагнетаемым из главного насоса 9, и вырабатывает движущую силу для обеспечения движения. Первый ходовой мотор 12 снабжен цилиндром 29 первого мотора для регулирования угла наклона при вращении первого ходового мотора 12 и регулирующим клапаном 30 первого мотора (см. фиг.3) для управления цилиндром 29 первого мотора. Регулирующий клапан 30 первого мотора представляет собой электромагнитный регулирующий клапан, управление которым осуществляется на основе управляющего сигнала от блока 16 регулирования и который может обеспечивать произвольное изменение производительности первого ходового мотора 12 в результате управления цилиндром 29 первого мотора.
Как и в случае с первым ходовым мотором 12, второй ходовой мотор 13 представляет собой гидромотор с переменной производительностью, приводимый в действие маслом под давлением, нагнетаемым из главного насоса 9, и развивающий на ведущем валу 15 движущую силу для движения. Второй ходовой мотор 13 установлен на гидропроводе параллельно первому ходовому мотору 12. Кроме того, второй ходовой мотор 13 снабжен цилиндром 31 второго мотора для регулирования угла наклона при вращении второго ходового мотора 13 и регулирующим клапаном 32 второго мотора (см. фиг.3) для управления цилиндром 31 второго мотора. Регулирующий клапан 32 второго мотора представляет собой электромагнитный регулирующий клапан, управление которым осуществляется на основе управляющего сигнала от блока 16 регулирования и который может обеспечивать произвольное изменение производительности второго ходового мотора 13 в результате управления цилиндром 31 второго мотора. Кроме того, регулирование управляющего сигнала, поступающего на регулирующий клапан 32 второго мотора, позволяет регулировать максимальный угол наклона при вращении и минимальный угол наклона при вращении.
Муфта 14 является устройством для переключения между передачей и отсутствием передачи движущей силы второго ходового мотора 13 на ведущий вал 15. Муфта 14 снабжена распределителем 33 муфты (см. фиг.3) для переключения муфты 14 между состоянием зацепления и состоянием отсутствия зацепления. Распределитель 33 муфты представляет собой электромагнитный регулирующий клапан для переключения муфты 14 между состоянием зацепления и состоянием отсутствия зацепления на основе управляющего сигнала от блока 16 регулирования. Во время движения на низких скоростях муфта 14 находится в состоянии зацепления, при котором обеспечивается передача движущей силы первого ходового мотора 12 и движущей силы второго ходового мотора 13 на ведущий вал 15. Во время движения на высоких скоростях муфта 14 находится в состоянии отсутствия зацепления, при котором на ведущий вал 15 передается только движущая сила первого ходового мотора 12.
Ведущий вал 15 передает движущую силу первого ходового мотора 12 и движущую силу второго ходового мотора 13 на шины 4a и 4b. В результате этой передачи шины 4a и 4b (см. фиг.1) приводятся во вращение. Кроме того, ведущий вал 15 снабжен блоком 34 измерения скорости транспортного средства (см. фиг.3), выполненным в виде датчика скорости транспортного средства для измерения скорости транспортного средства на основе скорости вращения ведущего вала 15. Сигнал скорости транспортного средства, вырабатываемый блоком 34 измерения скорости транспортного средства, поступает в блок 16 регулирования.
Блок 16 регулирования может осуществлять электрическое управления каждым из регулирующих клапанов и устройством 17 впрыска топлива на основе выходного сигнала от каждого из блоков измерения и регулировать скорость вращения двигателя, производительность каждого из гидравлических насосов 9-11, производительность каждого из ходовых моторов 12 и 13 и подобное. В результате, как показано на фиг.4, в этом строительном транспортном средстве 1 изменение тягового усилия и скорости транспортного средства может осуществляться плавно, и таким образом может обеспечиваться возможность автоматического изменения скорости транспортного средства без переключения передачи с нулевой скорости транспортного средства на максимальную скорость транспортного средства. Ниже приводится описание процесса управления ходовыми моторами 12 и 13, осуществляемого блоком 16 регулирования, и в частности, процесса управления ходовыми моторами 12 и 13 в диапазоне малых скоростей.
Управление ходовым мотором
Блок 16 регулирования обрабатывает выходные сигналы от блока 19 измерения скорости вращения двигателя и блока 22 измерения гидравлического давления в главной магистрали и вырабатывает команду на изменение угла наклона при вращении для ходовых моторов 12 и 13. Фиг.5 иллюстрирует взаимосвязь между углом наклона при вращении, гидравлическим давлением в главной магистрали и скоростью вращения двигателя. Сплошная линия на фиг.5 - это линия, определяющая угол наклона при вращении в зависимости гидравлического давления в главной магистрали при заданной скорости вращения двигателя. Угол наклона при вращении является минимальным (Min) до момента, пока гидравлическое давление в главной магистрали меньше или равно заданному значению, а затем по мере повышения гидравлического давления в главной магистрали угол наклона при вращении постепенно увеличивается (наклонный участок сплошной линии). По достижении максимального значения (Max) это максимальное значение Max угла наклона при вращении остается неизменным даже при повышении гидравлического давления.
Наклонный участок сплошной линии смещается вверх или вниз в зависимости от скорости вращения двигателя. Другими словами, при низкой скорости вращения двигателя регулирование угла наклона при вращении осуществляется так, что его увеличение начинается из состояния с более низким гидравлическим давлением в главной магистрали и максимальное значение угла наклона при вращении достигается в состоянии с более низким гидравлическим давлением в главной магистрали (см. наклонный участок пунктира на фиг.5 на более низком уровне). С другой стороны, при высокой скорости вращения двигателя регулирование угла наклона при вращении осуществляется так, что его минимальное значение Min остается неизменным до состояния с более высоким гидравлическим давлением в главной магистрали и максимальное значение Max угла наклона при вращении достигается в состоянии с более высоким гидравлическим давлением в главной магистрали (см. наклонный участок пунктира на фиг.5 на более высоком уровне).
Причем это строительное транспортное средство 1 включает в себя блок 35 выбора максимального тягового усилия (см. фиг.3). Манипулирование блоком 35 выбора максимального тягового усилия позволяет изменять максимальное тяговое усилие. Блок 35 выбора максимального тягового усилия представляет собой переключатель, установленный в кабине 5 оператора. Блок 16 регулирования осуществляет переключение максимального значения угла наклона при вращении второго ходового мотора 13 на основе выходного сигнала от блока 35 выбора максимального тягового усилия и, таким образом, обеспечивает изменение максимального тягового усилия. В этом строительном транспортном средстве 1 блок 35 выбора максимального тягового усилия может переключаться между двумя позициями, соответствующими включенному состоянию и выключенному состоянию. В случае, когда блок 35 выбора максимального тягового усилия находится в выключенном состоянии, максимальный угол наклона при вращении находится на фиг.5 в положении Max. При этом условии зависимость тягового усилия от скорости транспортного средства иллюстрируется на фиг.4 графиком L1. В случае же, когда блок 35 выбора максимального тягового усилия установлен во включенное состояние, значение максимального угла наклона при вращении изменяется на фиг.5 с Max на Max'. Таким образом, в случае, когда значение максимального угла наклона при вращении изменяется на Max' и становится меньше Max, можно получить характеристику зависимости тягового усилия от скорости транспортного средства с меньшим максимальным тяговым усилием, как проиллюстрировано графиком L2 на фиг.4. При этом графики L1 и L2 являются характеристиками зависимости тягового усилия от скорости транспортного средства при состоянии полного открытия акселератора. В результате даже в случае задания максимальной степени открытия акселератора для обеспечения величины параметра срабатывания рабочего органа 3 на дороге с низким трением типа дороги с мягким грунтом или дороги, покрытой снегом, происходит подавление движущей силы шин 4a и 4b, и это позволяет предотвратить срыв в скольжение. Причем возможно не только двухступенчатое изменение максимального тягового усилия, но и многоступенчатое с тремя или более ступенями изменения, а также непрерывное изменение.
Снижение проскальзывания
Рассматриваемое строительное транспортное средство 1 включает в себя блок 36 выбора режима снижения проскальзывания, и оператор может реализовать режим снижения проскальзывания в результате манипулирования блоком 36 выбора режима снижения проскальзывания. Режим снижения проскальзывания является режимом управления, позволяющим еще больше снизить риск срыва в скольжение путем изменения максимальной скорости вращения двигателя в зависимости от скорости транспортного средства. Блок 36 выбора режима снижения проскальзывания 36 представляет собой установленный в кабине 5 оператора переключатель с возможностью переключения между включенным состоянием и выключенным состоянием. Режим скольжения может быть реализован в случае, когда блок 36 выбора режима снижения проскальзывания находится во включенном состоянии. В случае же, когда блок 36 выбора режима снижения проскальзывания находится в выключенном состоянии, реализовать режим снижения проскальзывания невозможно. Ниже приводится описание процесса снижения проскальзывания со ссылками на блок-схему последовательности процесса на фиг.6.
Сначала на первом этапе S1 принимается решение о том, находится ли блок 35 выбора максимального тягового усилия во включенном состоянии или нет. Если блок 35 выбора максимального тягового усилия находится во включенном состоянии, то на втором этапе S2 принимается решение о том, выбран ли режим снижения проскальзывания или нет. При этом решение о выборе режима снижения проскальзывания принимается в случае включенного состояния блока 36 выбора режима снижения проскальзывания. Затем на третьем этапе S3 реализуется режим снижения проскальзывания. Другими словами, режим снижения проскальзывания реализуется в случае включенного состояния как блока 35 выбора максимального тягового усилия, так и блока 36 выбора режима снижения проскальзывания.
На четвертом этапе S4 при работе в режиме снижения проскальзывания измеряется скорость транспортного средства. Затем на пятом этапе S5 на основе измеренной скорости транспортного средства определяется максимальная скорость вращения двигателя. При этом блок 16 регулирования определяет максимальную скорость вращения двигателя на основе таблицы на фиг.7 и графика на фиг.8. Таблица и график служат для задания максимальной степени открытия акселератора в зависимости от скорости транспортного средства, причем максимальные степени открытия акселератора удовлетворяют следующему соотношению: E Характеристика зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента, представляет собой монотонно убывающую функцию и достигает максимального тягового усилия при скорости, равной нулю. На характеристике зависимости тягового усилия от скорости транспортного средства (см. график L4), получаемой в режиме снижения проскальзывания, максимальное тяговое усилие вырабатывается при более низкой скорости, чем скорость, при которой вырабатывается максимальное тяговое усилие на зависимости тягового усилия от скорости транспортного средства, проиллюстрированной на графике L2. График L2 выражает зависимость тягового усилия от скорости транспортного средства (степень открытия акселератора составляет 100%) в случае постоянства максимальной скорости вращения двигателя даже в диапазоне малых скоростей при работе не в режиме снижения проскальзывания и включенного состояния блока 35 выбора максимального тягового усилия. Другими словами, скорость транспортного средства, V1, при которой вырабатывается максимальное тяговое усилие на характеристике зависимости тягового усилия от скорости транспортного средства в случае работы в режиме снижения проскальзывания, ниже, чем скорость V2 транспортного средства, при которой вырабатывается максимальное тяговое усилие на характеристике зависимости тягового усилия от скорости транспортного средства в случае работы не в режиме снижения проскальзывания. Например, скорость V1 транспортного средства составляет 1 км/ч. При этом ограничение максимальной скорости вращения двигателя при работе в режиме снижения проскальзывания осуществляется в случае, когда гидравлическое давление в главной магистрали больше или равно давлению, при котором угол наклона при вращении второго ходового мотора 13 становится максимальным углом наклона при вращении. Это реализуется в случае, когда скорость транспортного средства ниже, чем скорость V3 транспортного средства на фиг.4. При этом в случае, когда блок 35 выбора максимального тягового усилия или блок 36 выбора режима снижения проскальзывания устанавливаются в выключенное состояние, блок 16 регулирования прекращает работу в режиме снижения проскальзывания. Отличительные признаки изобретения (1) В этом строительном транспортном средстве 1 при работе в режиме снижения проскальзывания осуществляется регулирование максимальной скорости вращения двигателя. Это позволяет получать характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента. Такая характеристика зависимости тягового усилия от скорости транспортного средства позволяет предотвратить легкое срывание транспортного средства в скольжение даже на дороге с низким трением. Например, обеспечивается повышение эффективности эксплуатации транспортного средства при таких работах, как уборка снега, работах в местах размещения домашнего скота и работах на песчаном грунте. Кроме того, предотвращение пробуксовки шин 4a и 4b может быть осуществлено независимо от работы акселератора. (2) В этом строительном транспортном средстве 1 блок 36 выбора режима снижения проскальзывания позволяет осуществлять произвольный выбор работы в режиме снижения проскальзывания или работы не в режиме снижения проскальзывания. Поэтому работа в режиме снижения проскальзывания может осуществляться в случае необходимости. Например, при движении по дороге с нормальными характеристиками транспортное средство может работать не в режиме снижения проскальзывания, а при работе на дороге, покрытой снегом, - в режиме снижения проскальзывания. (3) В строительном транспортном средстве 1 ограничение максимальной скорости вращения двигателя при работе в режиме снижения проскальзывания осуществляется в случае, когда гидравлическое давление в главной магистрали больше или равно давлению, при котором угол наклона при вращении второго ходового мотора 13 является максимальным углом наклона при вращении. Поэтому в случае, когда гидравлическое давление в главной магистрали ниже, чем давление, при котором угол наклона при вращении ходового гидромотора становится максимальным углом наклона при вращении, работа осуществляется не в режиме снижения проскальзывания, и, таким образом, возможно достижение хороших дорожных характеристик ходового гидромотора. Другие примеры осуществления (A) В описываемом выше примере осуществления максимальная скорость вращения двигателя в режиме снижения проскальзывания уменьшается по мере уменьшения скорости транспортного средства. Однако при возможности получения характеристики зависимости тягового усилия от скорости транспортного средства, аппроксимированной характеристикой зависимости тягового усилия от скорости транспортного средства, на котором установлен преобразователь крутящего момента, ограничение максимальной скорости вращения двигателя является не обязательным. (B) В описываемом выше примере осуществления максимальная скорость вращения двигателя определяется на основе скорости транспортного средства. Однако возможно и определение на основе гидравлического давления в главной магистрали. Например, таблица, типа таблицы, представленной на фиг.7, может быть подготовлена для каждого заданного диапазона гидравлического давления в главной магистрали. Кроме того, максимальная скорость вращения двигателя может быть определена на основе не скорости транспортного средства, а скорости вращения ведущего вала 15. Кроме того, в случае возможности многоступенчатого задания максимального тягового усилия, выбираемого с помощью блока 35 выбора максимального тягового усилия, с тремя или более ступенями изменения максимальная скорость вращения двигателя может определяться в зависимости от скорости транспортного средства и выбранной величины максимального тягового усилия. (C) В описываемом выше примере осуществления работа в режиме снижения проскальзывания осуществляется в случае включенного состояния блока 35 выбора максимального тягового усилия и задания низкого значения максимального тягового усилия. Однако работа в режиме снижения проскальзывания может осуществляться и в случае выключенного состояния блока 35 выбора максимального тягового усилия. Кроме того, при работе в режиме снижения проскальзывания в случае выключенного состояния блока 35 выбора максимального тягового усилия можно получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства на скорости первой передачи транспортного средства, на котором установлен преобразователь крутящего момента, а при работе в режиме снижения проскальзывания в случае включенного состояния блока 35 выбора максимального тягового усилия можно также получить характеристику зависимости тягового усилия от скорости транспортного средства, аппроксимированную характеристикой зависимости тягового усилия от скорости транспортного средства на скорости второй передачи транспортного средства, на котором установлен преобразователь крутящего момента. (D) В описываемом выше примере осуществления настоящее изобретение используется применительно к автопогрузчику. Однако настоящее изобретение может быть использовано применительно не только к автопогрузчику, но также и к строительному транспортному средству, приводимому в движение гидравлическим двигателем. Кроме того, строительное транспортное средство не ограничивается строительным транспортным средством 1 из описываемого выше примера осуществления, приводимым в движение двумя гидравлическими двигателями, и может представлять собой, например, транспортное средство, которое приводится в движение одним гидравлическим двигателем. (E) В описываемом выше примере осуществления ограничение максимальной скорости вращения двигателя при работе в режиме снижения проскальзывания осуществляется в случае, когда гидравлическое давление в главной магистрали больше или равно давлению, при котором угол наклона при вращении второго ходового мотора 13 является максимальным углом наклона при вращении. Однако это может осуществляться и в случае других значений гидравлического давления в главной магистрали. Промышленная применимость Эффект настоящего изобретения заключается в возможности снижения риска срыва в скольжение и в пригодности его использования в качестве строительного транспортного средства.
Реферат
Изобретение относится к строительным транспортным средствам, движение которых обеспечивается за счет гидравлического насоса. Транспортное средство содержит двигатель, гидравлический насос, ходовой гидромотор, ходовое колесо, блок регулирования, блок измерения скорости транспортного средства. В диапазоне малых скоростей, в котором скорость транспортного средства меньше или равна заданной скорости, блок регулирования выполнен с возможностью работы в режиме снижения проскальзывания для снижения максимальной скорости вращения двигателя по мере уменьшения скорости транспортного средства. Технический результат заключается в снижении риска скольжения. 5 з.п. ф-лы, 9 ил.
Комментарии