Гидропривод скрепера - SU1270241A1
Код документа: SU1270241A1
Чертежи

Описание
Изобретение относится к землеройнотранспортным машинам, а именно к их гидроприводам, имеющим узел амортизации.
Целью изобретения является повышение надежности работы скренера.
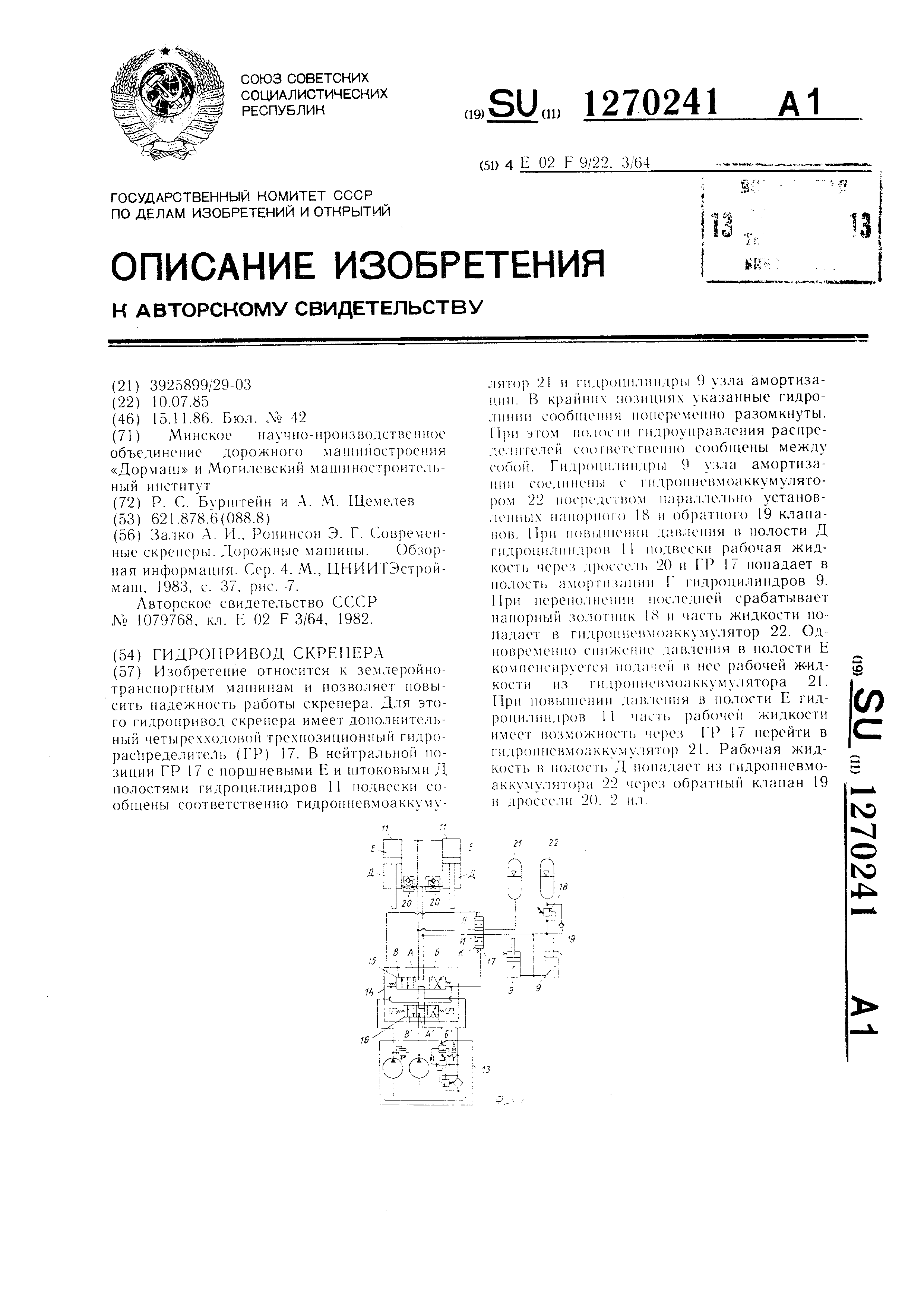
На фиг. 1 изображен скрепер, вид сбоку; па фиг. 2 -- нрипциниальная гидросхема устройства.
Гидропривод размещеп на базовой машине 1, имеюп1ей ковш 2, тяговое звено 3, каждая упряжная тяга которого соединена подвижно с боковыми стенками ковша 2 при помощи шарнирного четырехзвенника 4 и пальцев 5 и 6. В шарнирном четырехзвеннике 4 между пальцами 7 и 8 установлен 1идроцилиндр 9 узла амортизации подвески задней части ковша, а между пальцами 6 и 7 - пружинный амортизатор 10 двухстороннего действия, что совокупно образует узел амортизации. Ковш 2 подвешен к тяговому звену 3 па гидроцилиндрах 1 1 подвески передней части ковша и опирается на грунт колесами 12.
Гидропривод скренера включает насосную установку 13, распределитель 14 с позициями А, Б, В рабочего золотника 15 и соответствующими им позициями А, Б, в гидравлического управляющего золотника 16, гидроцил.индры 11 подвески передней части KOBHja 2 с полостями Д, Е, гидроцилиндры 9 узла амортизации с полостью амортизации Г, дополнительный четыре.хходовой трехпозиционный гидрораспределитель 17 с позициями И, К, Л напорный золотник 18, обратный клапан 19, дроссель с обратны.м клапаном 20 на магистралях к полостям Д гидроцплипдров 11 и гидропневмоаккумуляторы 21 и 22.
Позиции .Д, Б, В распределителя 14 обеспечивают соответственно положения ковша 2: нейтральное, подъем,опускание. Позиции И, К, Л гидрораспределителя 17 гидравлически сблокированы с позициями А, Б, В распределителя 14 и обеспечивают связь: полости Д гидроцилиндров 11 с полостью Г гидроцилиндров 9 и гидропневмоаккумуляторов 22 в позициях И, К, в позиции Л связь прервана; полости Е гидроцилиндров 11 с гидропневмоаккумулятором 21 в позициях И, Л, в позиции К связь прервана .
Гидропривод скрепера работает следующим образом.
Для подъема в транспортное положение ковща 2 управляющий золотник 16 распределителя 14 переводят в позицию Б (на фиг. 2 показан вариант управления с использованием электромагнитов). Это приводит к то.му, что управляющий поток рабочей жидкости направляется к правому торцу рабочего золотника 15 распределителя 14, переводя его в позицию Б, и к нижнему торцу золотника гидрораспределителя 17, переводя его в позицию К. Противоположные
торцы золотников 1ь и 18 при этом соединяются со сливом и не препятствуют их перемещению .
Теперь рабочая жидкость от насосной
установки 13 через распределитель 14 подается в полость Д гидроцилиндров 11, производя втягивание штоков и подъем ковша 2. Одновременно рабочая жидкость подается в полость Г гидроци.;1индров 9, производя раздвигание дру1 от друга шарниров 7
и 8 шарнирного четырехзвенника 4 (фиг. I). Если давление рабочей жидкости в полости Д 1идроцилиндров I 1 достигнет максимальной ве.шчин1э1, необходимой для подъема ковша 2 с набранным i-рунтом и на которую
настроен напорный золотник 18, произойдет его открытие и дозаправка рабочей жидкостью гидропнев.моаккумулятора 22. Последний , таким образом, автоматически заряжается на высокое давление подъема груженого ковша.
Из полости В гидрацилиндров 11 рабочая жидкость уходит на слив через распределитель 14, при этом идронневмоаккумулятор 21 отсечен от сливной ма1истрали распределителя 17, в связи с чем его разрядка иск.1ючается.
По окончании подъема ковша 2 унравляюп ий золотник 16 распределителя 14 переводят в позицию А, что приводит к соединению .со с;1ивом торцов рабочего золотника 15 распределителя 14 и золотника раснределителя 17 и их переводу в нейтральные позиции соответственно А и И.
В таком положении осуществляется транспортная операция скрепера, при которой насосная установка 13 перекачивает рабочую жидкость без сопротивления на слив.
Неровности дороги, копируемые колесами базовой машины I и колесами 12, вызывают появление вертикальных динамических нагрузок, вызванных мгновенным изменением положения центра тяжести ковша (с грузом) по вертикали. Эти нагрузки вызывают повышение давления в полостях Д, Е гидроцилиндров 11. При повышении давления в полости Д у рабочей жидкости есть возможность, пройдя через дроссель 20 и
распределитель 17, попасть в по.юсть амортизации Г гидроцилиндров 9. При переполнении последней срабатывает напорный золотник 18 и часть /1ч дкости попадает в гидропневмоаккумулятор 22. Одновременно снижение давления в полости Е компенсируется подачей в нее рабочей жидкости без сопротивления из гидропневмоаккумулятора 21.
И наоборот, при повышении давления в полости Е гидроцилиндров 11 часть рабочей жидкости имеет возможность через распределитель 17 перейти в гидропневмоаккумулятор , при этом в полость разрежения Д рабочая жидкость без сопротивления засасывается из гидропневмоаккумулятора 22 через обратные клапаны 19 и дроссели 20. Благодаря подвижности ковша 2 относительно тягового звена 3 в передней (в гндроцилиндрах 11) и в задней частях (в узле амортизации njapHHpHoro четырехзвенника 4, фиг. 1) траектория движения колес не передается ковшу 2, который перемешается в пространстве по значительно более сглаженной кривой, нежели неровности дороги. При этом наличие дросселя 20 и разного по величине противодавления в гидропневмоаккумулятора .х 21 и 22 исключает возникновение автоколебаний. Для опускания ковша 2 управляющий золотник 16 распределителя 14 переводят в позицию в (фиг. 2). Это приводит к тому , что управляющий поток рабочей жидкости направляется к левому торцу рабочего золотника 15 распределителя 14, переводя его в позицию В, и к вер.хнему торцу золотника распределителя 17, переводя его в позицию Л. Противоположные торцы золотников 15 и 17 при это.м соединены со сливом и не препятствуют их перемещению. Теперь рабочая жидкость от насосной установки 13 через распределитель 14 подается в полость Е гидроцилиндров 11, производя выдвижение штоков и опускание ковша 2, и одновременно в гидропневмоаккумулятор 21, производя его подзарядку на небольшое давление, соответствуюшее давлению , необходимо.му для опускания ковша. Сливной поток из полости Д гидроцилиндров 11 через распределитель 14 идет в бак. Гидропнев.моаккумулятор 22 и гидроцилиндры 9 узла амортизации надежно отсечены от сливного потока гидрораспределителем 17 По окончании опускания ковша 2 управляющий золотник 16 распределителя 14 переводят в позицию А, что приводит к соединению со сливо.м торцов рабочего золотника 15 распределителя 14 и гидрораспределителя 17 и к их переводу в нейтральное положение пружина.ми. При копании, значительная часть которого осуществляется в нейтральном положении распределителя 14, ковш 2 находится под воздействием следующих основных сил: горизонтального и вертикального усилий на ноже, весовой нагрузки и давления рабочей жидкости в полостях Д, Е, соединенных с гидропневмоаккумуляторами 21 и 22. Поэтому в первый момент после перевода распределителя 14 в нейтральное положение возможен небольщой приподъем ков- ша 2 до установления равновесия сил на штоках гидроцилиндров 11. Если в процессе копанИЯ горизонтальное усилие на ноже ковша 2 приведет к деформированию шарнирного четырехзвенника 4 и выдавливанию рабочей жидкости из полости Г гидроцилиндров 9 узла амортизации , рабочая жидкость будет перетекать в полость Д гидроцилиндров 11, несколько выглубляя ковш 2 и снижая толщину стружки , что в большинстве случаев, когда перед ножом нет непреодолимого препятствия, фиводит к снижению сопротивления копания . При этом рабочая жидкость из полости Е гидроцилиндров 11 выдавливается в гидропневмоаккумулятор 21. Если нож ковша 2 при копании встречает непреодолимое препятствие, предлагаемое решение снижает дина.мику этого столкновения , так как рабочая деформация шарнирного четырехзвенника 4 приводит к некоторому его удлинению в продольном направлении . При этом базовая машина 1 несколько уходит вперед по отношению к ковшу 2 и нарастание усилия от величины, при которой происходит срабатывание устройства (начало выдавливания рабочей жидкости из полости Г), до величины, определяемой пробуксовкой колес остановившейся базовой мauJины 1, оказывается растянутым во времени . Это предохраняет узлы и системы машины, в том числе и гидросистему, от ударных нагрузок и преждевременного разрушения . При копании грунтов с различной плотностью отдельных участков забоя зависи .мость толщины стружки от сопротивления на ноже позволяет скреперу автоматически регулировать в некоторых пределах толщину стружки. Процесс снижения толщины стружки описан. При встрече ножа с менее плотным грунтом сопротивление конанию снижается, что приводит к снижению расходуемо10 тягового усилия и усилия па штоке гидроцилиндров 9 узла амортизации. Это позволяет рабочей жидкости из полости Д гидроцилиндров 1 I через дроссель 20 и распределитель 17 попасть в полость Г гидроцилиндров 9. Происходит опускание ковша 2 с увеличением толщины стружки и подтягивание KOBnja 2 к базовой мaцJинe 1 за счет уменьшения продольного размера узла амортизации. Подпитка полости Е происходит за счет рабочей жидкости гидропневмоаккумулятора 21. Таки.м образом, рабочая жидкость в сообщающихся между собой полостях Д и Г является чувствительным эле.ментом, воспринимающим и передающим впешние нагрузки в системе: полость Д - весовые и вертикальные нагрузки копания, полость Г -- тяговое усилие и горизонтальное усилие копания . Благодаря это.му система яв,1яется самоустанавливающейся, адаптируясь к внешним условиям нагружения. В тех редких случаях, ко1да систгм: становится полужееткой (переходпьо ;Р : цессы заглубления и Bbir,iy6;ieiii я к.ч-; предельное выдвижение штоков п ;:.)ii: .. : .ров 9 узла амортизации), она i и ШУЮ подвижность в узле ам( ч.;;, гчс1 |1|)жипиогс) aMOpTH;iaTopa 10, что поз140 .1ягт в некоторых продолах изменять взаiivinn- положение ковша 2 и тягового звена 3 i .|.ить ножом мелкие нренягстиия (бу .1ЫЖНИКИ и нр.) за счет iiepTi Ka,(J омецсння н енособностн самовибра;:;. Вы1);-;ка IpyiiTa нри не(1тр,альпои но.и;а11 к:с1:ределите. 14 подобно ог1исаино ;у юш.дстппо конетрукнни нри транснортиронкг г 1унта 1К)зво:1яет корлну 2 сглаживать колебания, пызываем1)1е неро15ностью опорной юиерхности иод колесами, в связи с чем 11,1аннруемый ножом paзгpyжaeмlJlii грунт становится уже 6o:iee ровным, что снижает число нроходов других ман1ин строительного комилекта. Формула изобретения Гидроиривод скрепера, вкллочгмоицп иаеосную установку, гидроци,:111ндры подвески передней части ковша с Г11дроу11 1ав.1яемым раснределителем, гидроцилиндры узла амортизации подвески задней части ковша и |идрониевмоаккуму,:1яторы, иервый из котоpiiix соединен с гидроцилиндром амортизации , отличающийся тем, что, с целью ,1П1сния надежности работы скреиера, он снабжен доио,тните.чыЦ11М чет1 1рехходоribi i т)ех11озициоиным г и, дро рас предел и те/icM , в нейтра.тьпой позиции которого с иорпинч.ыми и нггоковыУ:И iio.iocTHMH гидроци ,:1индров передней части ковша сообщены соответственно второй гидроипсвмоаккумуляюр и 1;1дроци;тндры уз.ча амортизации, а в крайних позициях указанiii )ie гидролинии сообигения ноиеременно разомкнут). Him )м 1о.1ости идроу 1равления рас 1рсде.,:1ей соответственно сооб1це 1 между собой, а 1Дроц 1;. узла сосди е з1 с первым идрог цевмоаккуму .тятором осредством 1ара.чле:)НО ста С)в. iano)ioi-{) и обрат О о кла


Реферат
Формула
Комментарии