Способ управления машиной для перемещения материалов - RU2698756C2
Код документа: RU2698756C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления машиной для перемещения материалов.
Уровень техники
Известные машины для перемещения материалов, в частности погрузчики с обратной лопатой или мини-экскаваторы, могут выполнять операции по перемещению материалов, находясь в стационарном положении. Поэтому обратную лопату погрузчика можно использовать для перемещения материала, когда указанный погрузчик с обратной лопатой установлен в стационарном положении. Аналогично этому рабочую стрелу мини-экскаватора можно использовать для перемещения материала, когда экскаватор находится в стационарном положении.
Такие машины содержат стабилизаторы или т.п., которые можно перемещать до упора в грунт, чтобы способствовать стабилизации машины во время выполнения операций по перемещению материалов. В одном примере погрузчик с обратной лопатой содержит стабилизатор с каждой стороны задней части машины. Каждый стабилизатор можно по отдельности опускать до упора в грунт. Часто удобно опускать стабилизаторы для упора в грунт таким образом, чтобы задние колеса погрузчика с обратной лопатой были приподняты над грунтом. Это обеспечивает более стабильную установку, поскольку эластомерные шины погрузчика с обратной лопатой в таком случае не нагружаются весом погрузчика.
Аналогично этому в известных экскаваторах предусмотрен отвал, расположенный в передней части машины и проходящий в поперечном направлении. Этот отвал можно опускать до упора в грунт, чтобы способствовать стабилизации машины.
Стабилизаторы опускают до упора в грунт при помощи рабочих гидравлических цилиндров или т.п.
При подготовке к выкапыванию траншеи или т.п., когда машина находится в стационарном положении, одной из первых операций, которую выполняет оператор, является перемещение стабилизаторов до упора в грунт. Для экономии времени оператор обычно полностью вводит в действие рычаг или рычаги управления, которые обеспечивают развертывание одного или более стабилизаторов. Для этого гидравлический насос, который подает рабочую жидкость в цилиндры или т.п., перемещающие стабилизаторы должен удовлетворять высоким требованиям. Это, в свою очередь, приводит к предъявлению высоких требований к двигателю, который приводит в действие гидравлический насос. Поскольку развертывание стабилизаторов является одной из первых выполняемых операций, оператор может включать двигатель на холостом ходу. Различные ситуации могут приводить к тому, что двигатель будет снижать обороты (т.е., будет вращаться с гораздо более низкой частотой, чем нормальная частота вращения двигателя в режиме холостого хода) или даже заглохнет. Это может произойти в том случае, если машина оставлена без использования на ночь в холодном климате. Оператор, начиная работу днем, занимает место в кабине, запускает двигатель, а затем почти незамедлительно производит развертывание стабилизаторов. Поскольку двигатель не имеет достаточного времени для прогрева, а рабочая жидкость гидросистемы является холодной, полное развертывание стабилизаторов вызывает приложение высокой нагрузки к двигателю, который, как указано выше, может работать на холостом ходу. Эта высокая нагрузка может быть достаточной для того, чтобы двигатель начал снижать обороты, т.е., замедлился до частоты вращения, гораздо более низкой частотой, чем нормальная частота вращения двигателя в режиме холостого хода, или даже может вызывать остановку двигателя. Очевидно, что это является неудобным для оператора, поскольку вызывает задержки в работе.
Раскрытие изобретения
Задачей настоящего изобретения является обеспечение усовершенствованной машины для перемещения материалов.
Поэтому согласно настоящему изобретению обеспечен способ управления машиной для перемещения материалов, содержащей двигатель, один или более стабилизаторов и управляющее устройство, которым оператор может выборочно управлять для перемещения указанных одного или более стабилизаторов, при этом указанный способ содержит следующие операции:
а) запуск одного или более стабилизаторов в первой позиции и двигателя работающего с первой частотой вращения,
б) включение управляющего устройства для перемещения по меньшей мере одного из стабилизаторов во вторую позицию и включение управляющего устройства, вызывающего увеличение частоты вращения двигателя,
в) выключение управляющего устройства для одновременной остановки перемещения указанного по меньшей мере одного из стабилизаторов и уменьшения частоты вращения двигателя до первой частоты вращения.
Предпочтительно, чтобы во время перемещения указанного одного или каждого стабилизатора частота вращения двигателя автоматически увеличивалась без воздействия оператора. После окончания перемещения одного или каждого стабилизатора в соответствующую позицию (например, в развернутую или в отведенную позицию) частота вращения двигателя уменьшается, обеспечивая, таким образом, экономию топлива.
Первая частота вращения двигателя может представлять собой частоту вращения двигателя в режиме холостого хода.
Машина может содержать одну или более дроссельных заслонок, управляемых оператором, при этом каждую дроссельную заслонку, управляемую оператором, можно устанавливать в положение, соответствующее частоте вращения двигателя в режиме холостого хода, или в выключенное положение.
Первая частота вращения двигателя может превышать частоту вращения двигателя в режиме холостого хода и может быть установлена дроссельной заслонкой, управляемой оператором.
Машина может содержать функцию автоматического включения режима холостого хода для уменьшения частоты вращения двигателя относительно частоты вращения двигателя, которую задают заслонкой, управляемой оператором, после определенного периода бездействия.
Указанный способ может содержать следующую операцию:
г) использование функции автоматического включения режима холостого хода для уменьшения частоты вращения двигателя ниже первой частоты вращения двигателя.
Указанные одно или более устройств, управляемых оператором, могут быть выбраны из группы, включающей манетку дроссельной заслонки и педаль дроссельной заслонки.
При переходе между первой позицией и второй позицией перемещение указанного одного или каждого стабилизатора может быть определено заданной траекторией.
Указанные один или более стабилизаторов могут представлять собой первый стабилизатор, установленный с правой стороны машины, и второй стабилизатор, установленный с левой стороны машины.
Первый и второй стабилизаторы могут быть установлены на задней части машины.
Первый и второй стабилизаторы могут быть установлены на передней части машины.
Первый и второй стабилизаторы могут быть установлены с возможностью поворота вокруг по существу горизонтальной оси для перемещения между отведенной и развернутой позициями.
Первый и второй стабилизаторы могут быть установлены с возможностью перемещения по существу в вертикальном направлении для перемещения между отведенной и развернутой позициями.
Указанные один или более стабилизаторов могут представлять собой отвал, ориентированный в поперечном направлении.
Указанный отвал может быть установлен с возможностью поворота вокруг по существу горизонтальной оси.
Отвал может быть установлен с возможностью поворота непосредственно на ходовой части машины таким образом, чтобы обеспечить его перемещение по дуге.
Первое звено может быть закреплено с возможностью поворота непосредственно на ходовой части машины и может быть закреплено с возможностью поворота на отвале, при этом второе звено может быть закреплено с возможностью поворота непосредственно на ходовой части машины и может быть закреплено с возможностью поворота на отвале, чтобы образовывать шарнирный четырехзвенник.
Машина может также содержать одно или более эластомерных движущих устройств для сцепления с грунтом.
Во время выполнения операции б) частота вращения двигателя может возрастать до заданного значения.
Во время выполнения операции б) частота вращения двигателя может возрастать пропорционально величине активации управляющего устройства.
Во время выполнения операции б) только активация управляющего устройства, превышающая заданный уровень, может вызывать увеличение частоты вращения двигателя.
Краткое описание чертежей
Ниже только в качестве примера приведено описание варианта осуществления изобретения со ссылками на прилагаемые чертежи, на которых показаны:
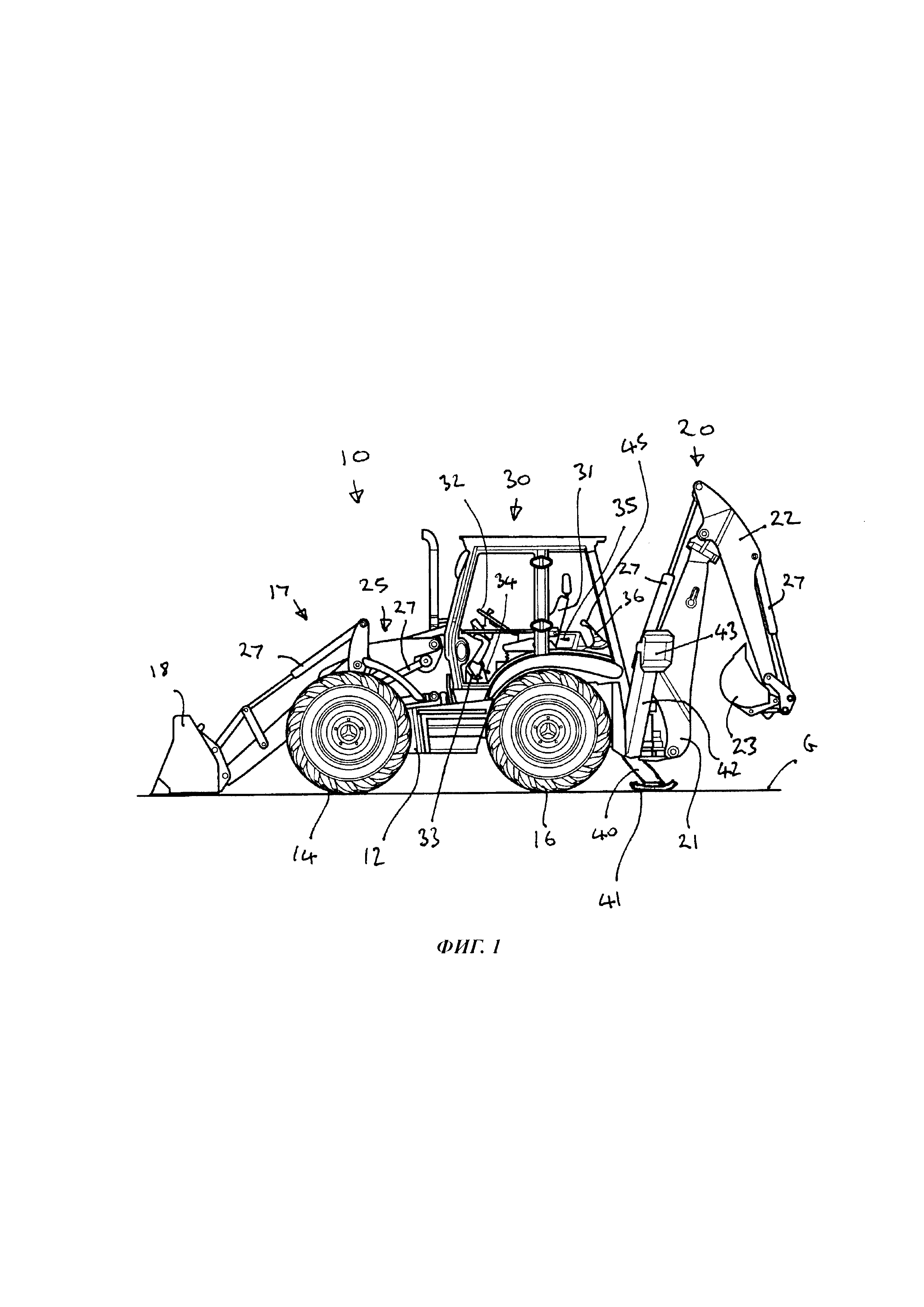
фигура 1 - погрузчик с обратной лопатой, управление которым можно осуществлять в соответствии с настоящим изобретением, и
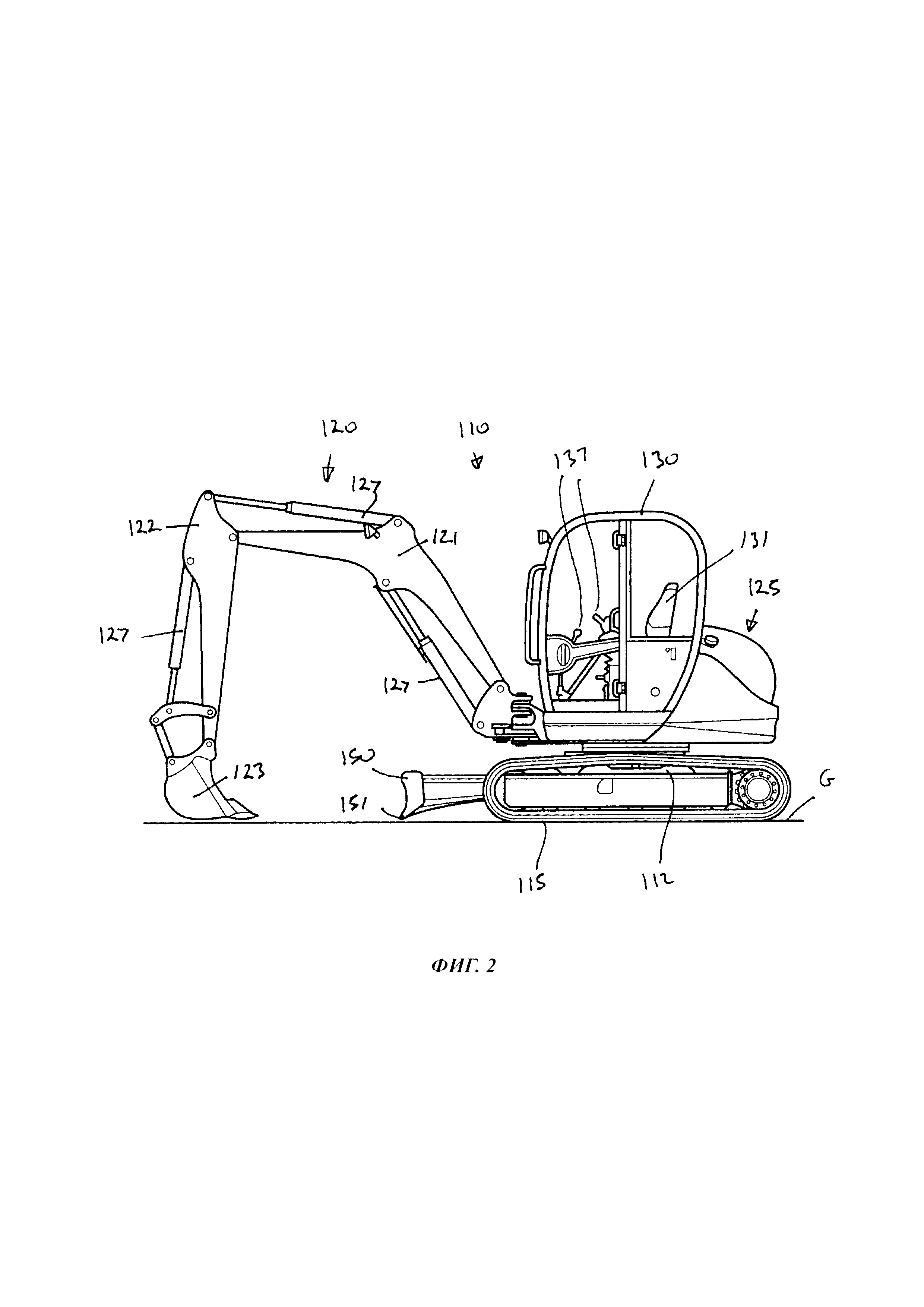
фигура 2 - мини-экскаватор, управление которым можно осуществлять в соответствии с настоящим изобретением.
Осуществление изобретения
На фигуре 1 показана машина для перемещения материалов в виде погрузчика 10 с обратной лопатой, содержащая ходовую часть 12, которая установлена с опорой на передние колеса 14 и задние колеса 16. На ходовой части установлен загрузочный рукав 17, на передней части которого закреплен инструмент, в данном случае - загрузочный ковш 18. Загрузочный рукав и загрузочный ковш расположены спереди машины. Загрузочный ковш установлен с возможностью поворота относительно загрузочного рукава, в то время как загрузочный рукав установлен с возможностью поворота относительно ходовой части машины. В соответствии с этим загрузочный ковш можно перемещать в требуемую позицию, и при этом перемещение загрузочного ковша между первой позицией и второй позицией не ограничено какой-либо заданной траекторией.
На задней части машины установлена обратная лопата 20, содержащая стрелу 21, рукоять 22 и ковш 23. Ковш установлен с возможностью поворота относительно рукояти, рукоять установлена с возможностью поворота относительно стрелы, а стрела установлена с возможностью поворота относительно ходовой части машины. В соответствии с этим ковш можно перемещать в любую требуемую позицию, и при этом перемещение ковша между первой позицией и второй позицией не ограничено какой-либо заданной траекторией.
Машина содержит двигатель 25, который обеспечивает мощность для движения машины по грунту при помощи колес. Кроме того, двигатель 25 обеспечивает мощность для работы гидравлического насоса, который может избирательно нагнетать рабочую жидкость в различные цилиндры 27 машины для функционирования загрузочного рукава, загрузочного ковша, стрелы, рукояти, ковша и т.п., чтобы обеспечить работу с материалом. Машина содержит кабину 30 оператора, в которой предусмотрено сиденье 31 оператора. Кабина оператора содержит органы управления, в частности, рулевое колесо 32, ножной тормоз 33, педаль 34 дроссельной заслонки, манетку 35 управления дроссельной заслонкой и рычаг 36 управления обратной лопатой.
Как показано на фигуре 1, сиденье 31 оператора обращено вперед. Сиденье оператора установлено с возможностью поворота и может быть повернуто таким образом, чтобы оно было обращено к задней части машины. Если сиденье обращено к задней части машины, манетка 35 управления дроссельной заслонкой и рычаг 36 управления обратной лопатой являются легкодоступными для оператора.
Погрузчик 10 с обратной лопатой содержит также задний правый стабилизатор 40 с опорной лапой 41 и задний левый стабилизатор 42 с опорной лапой 43. Как показано на фигуре 1, задний правый стабилизатор 40 развернут таким образом, что лапа 41 упирается в грунт G, а задний левый стабилизатор 42 находится в полностью отведенной позиции, при этом лапа 43 не упирается в грунт G, а находится на расстоянии от него. Каждый стабилизатор установлен с возможностью независимого перемещения между отведенной позицией и развернутой позицией при помощи управляющего устройства 45, которое в данном случае установлено на рычаге 36 управления обратной лопатой.
Как указано выше, на фигуре 1 задний правый стабилизатор показан в развернутой позиции, а задний левый стабилизатор - в отведенной позиции. Такая позиция стабилизаторов является необычной (обычно оба они являются полностью отведенными или полностью развернутыми), но, тем не менее, они показаны в этой позиции для более наглядного пояснения настоящего изобретения. Каждый стабилизатор установлен с возможностью поворота между отведенной и развернутой позициями вокруг по существу горизонтальной поворотной оси. Каждый стабилизатор перемещается между отведенной и развернутой позициями под действием гидравлического цилиндра (не показан), в который избирательно нагнетается рабочая жидкость из гидравлического насоса, приводимого в действие двигателем 25. Понятно, что перемещение части стабилизатора, которая упирается в грунт (т.е., лапы 41 или 43), происходит по заданной траектории, в данном случае - по дуге с центром, расположенным в точке, вокруг которой данный стабилизатор поворачивается при перемещении между развернутой и отведенной позициями.
Ниже приведены примеры функционирования настоящего изобретения.
Пример 1
Машина доставлена на место проведения работ и припаркована готовой для работы на следующий день. Ковш 18 опущен до упора в грунт, а задний правый и задний левый стабилизаторы находятся в отведенной позиции, при этом опорные лапы 41 и 43 удалены от грунта.
На следующий день оператор входит в кабину и запускает двигатель. Двигатель работает на холостом ходу, в данном примере с частотой 800 об/мин. Затем оператор поворачивает сиденье 31 назад и включает управляющее устройство 45 для перемещения заднего правого стабилизатора 40 и заднего левого стабилизатора 42 в развернутые позиции таким образом, чтобы опорная лапа 41 и опорная лапа 43 упирались в грунт. Управляющее устройство 45 производит развертывание обоих стабилизаторов, а также увеличивает частоту вращения двигателя до рабочей частоты, в данном примере - 1200 об/мин. Это увеличение частоты вращения двигателя приводит к повышению мощности привода гидравлического насоса, который, в свою очередь, может подавать больший поток в гидравлические цилиндры, перемещающие стабилизаторы 40 и 42. Таким образом, происходит не только более быстрое перемещение стабилизаторов в развернутую позицию, чем в случае работы двигателя на холостом ходу, но увеличение частоты вращения двигателя предотвращает также снижение оборотов и/или остановку двигателя.
После того, как стабилизаторы 40 и 42 буду развернуты в требуемой позиции (обычно задние колеса 16 при этом немного приподнимаются над грунтом), оператор отпускает (или выключает) управляющее устройство 45, после чего происходит одновременное прекращение движения одного или обоих стабилизаторов и возврат частоты вращения двигателя к режиму холостого хода.
Важно то, что во время развертывания стабилизаторов оператору не нужно управлять дроссельной заслонкой, при этом увеличение частоты вращения двигателя с 800 об/мин до 1200 об/мин происходит автоматически, и аналогично этому частота вращения двигателя автоматически уменьшается с 1200 об/мин до 800 об/мин, что позволяет экономить топливо.
Пример 2
В конце рабочего дня, когда оператор копал траншею при помощи погрузчика с обратной лопатой, используя обратную лопату, он припарковал машину со стабилизаторами 40 и 42, находящимися в развернутой позиции.
На следующий рабочий день оператор входит в кабину и запускает двигатель, который затем работает на холостом ходу. Оператору необходимо продолжить выкапывание траншеи, но для этого требуется переместить машину вперед, возможно на длину машины, чтобы продолжить работу. Для этого оператор поворачивает сиденье назад и включает управляющее устройство 45 для перемещения обоих стабилизаторов 40 и 42 из развернутой позиции в отведенную позицию. Управляющее устройство 45 увеличивает частоту вращения двигателя от режима холостого хода до 1200 об/мин, что вызывает более быстрое перемещение задних стабилизаторов в отведенную позицию, а также предотвращает снижение оборотов или остановку двигателя. После того, как стабилизаторы перейдут в отведенную позицию, оператор отпускает управляющее устройство 45, при этом двигатель переходит в режим холостого хода. Затем оператор снова поворачивает сиденье вперед и поднимает загрузочный рукав 17, при этом загрузочный ковш 18 поднимается над грунтом. В случае необходимости оператор может использовать педаль 34 дроссельной заслонки. Затем оператор включает передачу, перемещает машину вперед при помощи педали дроссельной заслонки, возможно, на длину машины, а затем переключает двигатель в нейтральное положение, опускает загрузочный рукав 17 таким образом, чтобы загрузочный ковш 18 упирался в грунт, поворачивает сиденье назад и развертывает стабилизаторы 40 и 42 при помощи управляющего устройства. При переходе стабилизаторов 40 и 42 в развернутую позицию частота вращения двигателя увеличивается от частоты вращения двигателя в режиме холостого хода до 1200 об/мин, что приводит к ускоренному опусканию стабилизатора и предотвращает снижение оборотов или остановку работы двигателя. Понятно, что в этом втором примере все вышеуказанные операции могут быть выполнены в течение относительно короткого периода времени (возможно, в течение нескольких минут), и также очевидно, что в течение этого периода времени двигатель не прогреется в достаточной степени, и рабочая жидкость гидросистемы останется относительно холодной.
В погрузчике 10 с обратной лопатой может быть предусмотрена функция автоматического включения режима холостого хода. Функции автоматического включения режима холостого хода являются известными и используются в сочетании с манеткой управления дроссельной заслонкой. Манетка управления дроссельной заслонкой позволяет оператору избирательно устанавливать частоту вращения двигателя равной рабочей частоте вращения, которая превышает нормальную частоту вращения двигателя в режиме холостого хода. Таким образом, чаще всего, когда оператор повернул сиденье назад и использует рычаг 36 управления обратной лопатой для манипулирования обратной лопатой с целью перемещения материала и т.п., оператор может устанавливать частоту вращения двигателя при помощи манетки 35 управления дроссельной заслонкой. В одном примере оператор может устанавливать частоту вращения двигателя равной рабочей частоте 2,000 об/мин. Это обеспечивает возможность быстрого манипулирования обратной лопатой, поскольку рабочая жидкость является готовой к подаче из гидравлического насоса для управления цилиндрами 27, связанными с обратной лопатой. Однако если требуется предусмотреть период неактивности в применении обратной лопаты, например, если обратную лопату не используют в течение одной минуты, то функция автоматического включения режима холостого хода автоматически уменьшает частоту вращения двигателя, чтобы обеспечить экономию топлива. В одном примере функция автоматического включения режима холостого хода может уменьшить частоту вращения двигателя от рабочего значения, равного 2,000 об/мин, до частоты вращения двигателя в режиме холостого хода, равной 800 об/мин, за одну операцию. Если оператор решает снова использовать обратную лопату, он манипулирует рычагом 36 управления обратной лопатой таким образом, чтобы это манипулирование заставляло систему управления вернуться к рабочему значению частоты вращения двигателя, равному 2,000 об/мин.
В других примерах функция автоматического включения режима холостого хода может постепенно уменьшить частоту вращения двигателя до частоты вращения двигателя в режиме холостого хода. Однако все функции автоматического включения режима холостого хода после распознания возобновления работы (например, в результате манипуляции рычага управления 36) обеспечивают возвращение частоты вращения двигателя к рабочему значению, которое определяется установкой манетки 35 управления дроссельной заслонкой.
Таким образом, функция автоматического включения режима холостого хода обеспечивает уменьшение частоты вращения двигателя ниже значения, установленного манеткой управления дроссельной заслонкой, после неактивного периода, а затем, при возобновлении работы, увеличение частоты вращения двигателя до значения, установленного манеткой управления дроссельной заслонкой. Это может отличаться от настоящего изобретения, согласно которому частота вращения двигателя увеличивается во время перемещения стабилизаторов и т.п., но при прекращении перемещения стабилизаторов и т.п. это увеличение одновременно прекращается, и частота вращения двигателя может уменьшаться до величины, соответствующей частоте вращения двигателя в режиме холостого хода, или до уровня, установленного манеткой управления дроссельной заслонкой.
Таким образом, если педаль дроссельной заслонки не нажата и манетка управления дроссельной заслонкой установлена на уровне частоты вращения двигателя в режиме холостого хода, настоящее изобретение обеспечивает увеличение частоты вращения двигателя во время перемещения стабилизаторов, а когда перемещение стабилизаторов прекращается, частота вращения двигателя одновременно начинает уменьшаться до величины, соответствующей частоте вращения двигателя в режиме холостого хода. Однако, если частота вращения двигателя установлена манеткой управления дроссельной заслонкой на уровне 1,000 об/мин, во время перемещения стабилизаторов настоящее изобретение обеспечивает повышение частоты вращения двигателя до 1,200 об/мин, а когда перемещение стабилизаторов прекращается, частота вращения двигателя одновременно снижается до 1,000 об/мин. Если затем наступает период неактивности (например, в течение 1 минуты) после того, как стабилизаторы прекратили перемещение, то функция автоматического включения режима холостого хода может снизить частоту вращения двигателя до величины, соответствующей частоте вращения двигателя в режиме холостого хода, равной 800 об/мин. Таким образом, настоящее изобретение может быть использовано в сочетании с функцией автоматического включения режима холостого хода. При этом в других вариантах осуществления, хотя настоящее изобретение можно использовать в машине, снабженной функцией автоматического включения режима холостого хода, однако, настоящее изобретение может быть реализовано независимо от этой функции. Так, в приведенном выше примере, если настоящее изобретение осуществляется независимо от системы автоматического включения режима холостого хода, при перемещении стабилизаторов частота вращения двигателя увеличивается до 1,200 об/мин, а после прекращения перемещения стабилизаторов, частота вращения двигателя снижается до 800 об/мин (а не до 1,000 об/мин как в вышеуказанном примере).
На фигуре 2 показана машина 110 для перемещения материалов в виде мини-экскаватора. Мини-экскаватор содержит ходовую часть 112 и гусеничные ленты 115. Загрузочный рукав 120 содержит стрелу 121, рукоять 122 и ковш 123. Двигатель 125 управляет гидравлическим насосом, который может нагнетать рабочую жидкость в гидравлические цилиндры 127, чтобы манипулировать загрузочным рукавом 120. Мини-экскаватор содержит кабину 130 оператора с сиденьем 131. Органы 137 управления позволяют управлять машиной во время маневрирования, а также управлять загрузочным рукавом 120. Органы управления 137 содержат манетку управления дроссельной заслонкой, которая позволяет устанавливать частоту вращения двигателя на требуемом уровне.
Машина содержит установленный спереди отвал 150, имеющий нижнюю кромку 151. Гидравлический цилиндр (не показан) может поворачивать отвал 150 вокруг по существу горизонтальной оси, таким образом, чтобы нижняя кромка 151 могла упираться в грунт G или приподниматься над грунтом G. Понятно, что перемещение этой части отвала 150, которая упирается в грунт (т.е., нижняя кромка 151) осуществляется по заданной траектории, в данном случае - по дуге, центр которой расположен на вышеуказанной по существу горизонтальной оси. Отвал 150 может выполнять две функции. Во-первых, его можно использовать в качестве бульдозерного отвала для перемещения материала, когда экскаватор движется по грунту и толкает материал, находящийся перед отвалом 150. Кроме того, отвал 150 может быть использован для стабилизации машины, когда она находится в стационарном положении и производит перемещение материала при помощи управления загрузочным рукавом 120. Для использования в качестве стабилизатора приводят в действие гидравлический цилиндр при помощи управляющего устройства, таким образом, чтобы нижняя кромка 151 упиралась в грунт G, что обеспечивает стабилизацию машины, когда она находится в стационарном положении. Как показано на фигуре 2, нижняя кромка 151 приподнята над грунтом, и отвал находится в отведенной позиции. Функционирование машины 110 аналогично функционированию погрузчика 10 с обратной лопатой, поскольку двигатель работает на холостом ходу, и, если оператор решает переместить отвал в развернутую позицию из отведенной позиции или из развернутой позиции в отведенную позицию, управляющее устройство обеспечивает соответствующее перемещение отвала и одновременно увеличивает частоту вращения двигателя. После расположения отвала в требуемой позиции, оператор отпускает (или выключает) управляющее устройство, обеспечивая при этом прекращение перемещения отвала и одновременное уменьшение частоты вращения двигателя - обычно до величины, соответствующей частоте вращения двигателя в режиме холостого хода или задаваемой установкой манетки управления дроссельной заслонкой. Если частота вращения двигателя уменьшается до величины, заданной установкой манетки управления дроссельной заслонкой, и в машине предусмотрена действующая функция автоматического включения режима холостого хода, то после некоторого периода неактивности функция автоматического включения режима холостого хода может уменьшить частоту вращения двигателя до величины, меньшей, чем это задано установкой манетки управления дроссельной заслонкой, а именно, до частоты вращения, соответствующей частоте вращения двигателя в режиме холостого хода, либо за один этап, либо постепенно.
Как показано на фигуре 2, отвал 150 установлен с возможностью поворота относительно ходовой части. В других вариантах осуществления отвал может быть присоединен к ходовой части при помощи шарнирного четырехзвенника, чтобы обеспечить параллельное перемещение отвала во время подъема и опускания. При этом указанный шарнирный четырехзвенник может содержать первое звено, которое закреплено с возможностью поворота непосредственно на ходовой части, а также закреплено с возможностью поворота на верхней части отвала, и второе звено, которое закреплено с возможностью поворота непосредственно на ходовой части, а также закреплено с возможностью поворота на нижней части отвала. Первое звено может быть расположено выше, чем второе звено. Очевидно, что перемещение нижней кромки отвала осуществляется по заданной траектории, которая в данном случае определяется перемещением шарнирного четырехзвенника.
Для большей определенности в приведенных выше примерах частота вращения двигателя в режиме холостого хода принята равной 800 об/мин.
Однако изобретение может быть в равной степени использовано для двигателей с частотой вращения в режиме холостого хода, отличной от 800 об/мин. В приведенных выше примерах при перемещении стабилизаторов частота вращения двигателя увеличивалась до 1200 об/мин. Однако изобретение не ограничено увеличением частоты вращения двигателя до 1200 об/мин. Изобретение в равной степени может быть использовано для повышения частоты вращения двигателя до величины, отличной от 1200 об/мин. В приведенном выше примере рабочая частота вращения, равная 2000 об/мин, устанавливалась оператором. Настоящее изобретение может быть использовано для машин, в которых рабочая частота вращения может иметь любое значение, установленное в пределах рабочего диапазона двигателя.
Как указано выше, стабилизаторы 40 и 42 поворачиваются вокруг по существу горизонтальной оси, когда их перемещают между развернутой и отведенной позициями. Изобретение может быть использовано для стабилизатора любого типа. В частности, изобретение может быть использовано для стабилизаторов, которые перемещают (или переводят) по существу вертикально между развернутой и отведенной позициями. В частности, машина (например, погрузчик с обратной лопатой) может содержать задний правый стабилизатор, который перемещают (или переводят) по существу вертикально, и задний левый стабилизатор, который также перемещают (или переводят) по существу вертикально. Понятно, что перемещение лапы такого стабилизатора осуществляют по заданной траектории, и в данном случае такой траекторией является прямая линия.
На фигуре 1 показано, что стабилизаторы расположены в задней части машины, а на фигуре 2 показано, что стабилизирующий отвал 150 расположен в передней части машины. В других вариантах осуществления стабилизаторы других типов могут быть установлены в задней и передней частях машины. Так, например, стабилизаторы, которые поворачивают вокруг по существу горизонтальной оси аналогично стабилизаторам 40 и 42, могут быть установлены в передней части машины, в частности, телескопического погрузчика. Аналогично этому стабилизаторы, которые перемещают (или переводят) по существу вертикально, могут быть установлены в передней части машины, например, телескопического погрузчика, в частности, такой стабилизатор может быть установлен в передней правой и передней левой части машины.
Как показано на фигуре 1, колеса 14 и 16 содержат эластомерные шины, в данном случае - пневматические шины. Стабилизаторы особенно широко применяют с эластомерными (в частности, с пневматическими) шинами, поскольку эластомерная шина имеет тенденцию прогибаться, что при отсутствии развернутых стабилизаторов вызывает раскачивание и перемещение ходовой части и кабины, когда обратная лопата или т.п. работает с материалом.
Как показано на фигуре 2, гусеничные ленты 15 представляют собой эластомерные гусеничные ленты, в данном случае - резиноподобные гусеничные ленты (в отличие от неэластомерных гусеничных лент, в частности, стальных или других металлических гусеничных лент).
Колеса 14 и 16 погрузчика 10 с обратной лопатой и гусеничные ленты 115 мини-экскаватора образуют опорное движущее устройство, поскольку они сцепляются с грунтом, когда это необходимо для движения машины по грунту. Настоящее изобретение является особенно полезным для машин, имеющих эластомерные опорные движущие устройства, в частности, эластомерные шины, например, пневматические шины.
Как указано выше, включение управляющих устройств для перемещения стабилизаторов вызывает увеличение частоты вращения двигателя, а выключение управляющих устройств приводит к уменьшению частоты вращения двигателя. В других вариантах осуществления увеличение частоты вращения двигателя может быть пропорциональным величине перемещения управляющих устройств. При этом относительно небольшое перемещение управляющих устройств может приводить лишь к относительно небольшому увеличению частоты вращения двигателя, в то время как относительно большое перемещение управляющих устройств может вызывать последующее большее увеличение частоты вращения двигателя. В обоих случаях после выключения управляющего устройства частота вращения двигателя уменьшается. Это является полезным, когда требуются небольшие изменения позиции стабилизаторов. В другом варианте осуществления небольшое перемещение управляющих устройств может не вызывать увеличения частоты вращения двигателя, в то время как относительно большое перемещение управляющих устройств может увеличивать частоту вращения двигателя. Такая система является полезной при окончательной настройке позиции стабилизаторов.
Реферат
Изобретение относится к способу управления машиной для перемещения материалов. Технический результат направлен на обеспечение усовершенствования машины для перемещения материалов. Машина для перемещения материалов содержит двигатель, устройство сцепления с грунтом и управляющее устройство, избирательно управляемое оператором для перемещения устройства сцепления с грунтом. Способ содержит следующие операции: Начало работы, при этом указанные один или более стабилизаторы приведены в первую позицию, а двигатель работает с первой частотой вращения; Активация управляющего устройства для перемещения устройства сцепления с грунтом во вторую позицию и увеличения частоты вращения двигателя; Выключение управляющего устройства для одновременной остановки перемещения устройства сцепления с грунтом и уменьшения частоты вращения двигателя до первой частоты вращения. 20 з.п. ф-лы, 2 ил.
Комментарии