Транспортное средство - RU2673497C2
Код документа: RU2673497C2
Чертежи

Описание
Область техники, которой относится изобретение
Настоящее изобретение относится к транспортному средству, в частности, к рабочему транспортному средству.
Уровень техники
Известные рабочие транспортные средства, в частности, погрузчики с обратной лопатой, содержат землеройно-транспортный инструмент, в частности, погрузочный ковш, установленный на передней части машины, и другой землеройно-транспортный инструмент, в частности, обратную лопату, установленную на задней части машины.
Если оператору требуется использовать погрузочный ковш, сиденье ориентируется в переднем направлении, и оператор может использовать органы управления, в частности, рулевое колесо, педаль тормоза, педаль сцепления, педаль акселератора, коробку передач, имеющую передние и задние передачи, и ручные органы управления для подъема и опускания нагрузочного рычага, а также для заполнения или опорожнения погрузочного ковша, чтобы осуществлять манипуляции с материалом.
В случае необходимости перемещения погрузчика с обратной лопатой с одного места на другое, обычно - по дорогам общественного пользования, погрузочный ковш поднимают над уровнем земли, после чего оператор, глядя вперед, может осуществлять управление погрузчиком с обратной лопатой аналогично управлению автомобилем при помощи рулевого колеса, тормоза, сцепления и органов управления дроссельной заслонкой.
Для пользования обратной лопатой сиденье установлено с возможностью поворота назад. При пользовании обратной лопатой транспортное средство устанавливают стационарно, при этом некоторые или все колеса могут быть приподняты над грунтом за счет выдвижения стабилизирующих опор и/или опускания переднего ковша до упора в грунт. Во время работы обратной лопаты необходимо осуществлять управление различными гидравлическими цилиндрами, в которые нагнетается рабочая жидкость от насоса, приводимого в действие двигателем. Для обеспечения мощности, необходимой для привода насоса, может потребоваться установка частоты вращения двигателя, превышающая нормальную частоту вращения в режиме холостого хода. Для установки частоты вращения двигателя, превышающей нормальную частоту вращения в режиме холостого хода, предусмотрена манетка управления дроссельной заслонкой, которая расположена в позиции, удобной для управления оператором, когда сиденье ориентировано назад.
Кроме того, поскольку погрузчик с обратной лопатой содержит гидравлический насос, который приводится в действие двигателем, имеется возможность присоединения внешнего вспомогательного устройства, в частности, водяного насоса с гидравлическим управлением или других внешних рабочих инструментов с гидравлическим управлением, например, отбойного молотка, земляного бура, погружного насоса, дисковой фрезы, алмазного колонкового бура, гаечного ключа ударного действия, виброплиты и т.п. При работе внешних устройств транспортное средство устанавливают стационарно, и у оператора нет необходимости находиться в кабине. Для работы внешних устройств может потребоваться установка рабочей частоты вращения двигателя, превышающей частоту вращения двигателя в режиме холостого хода, в этом случае манетку управления дроссельной заслонкой используют для установки соответствующей частоты вращения двигателя.
Известна также функция автоматического включения холостого хода, при этом, если манетку управления дроссельной заслонкой используют для установки рабочей частоты вращения двигателя, то в том случае, когда система обнаруживает, что двигатель не работает под нагрузкой, частота вращения двигателя может быть уменьшена до величины, меньшей, чем рабочая частота вращения, в частности, до частоты вращения двигателя в режиме холостого хода, благодаря чему осуществляют экономию топлива. Частота вращения двигателя может быть уменьшена до частоты вращения двигателя в режиме холостого хода скачкообразно или постепенно. После приложения нагрузки частоту вращения двигателя увеличивают до рабочей частоты вращения, установленной манеткой управления дроссельной заслонкой. Таким образом, система обеспечивает экономию топлива при отсутствии совершаемой работы, однако, автоматически возвращается к частоте вращения, заданной манеткой управления дроссельной заслонкой (к "рабочей частоте вращения"), таким образом, при возобновлении работы оператору не нужно производить повторную установку частоты вращения двигателя.
Раскрытие изобретения
Согласно настоящему изобретению обеспечено транспортное средство, содержащее двигатель, который может быть избирательно присоединен к движущим устройствам, сцепляющимся с грунтом, при этом транспортное средство содержит также педаль дроссельной заслонки для избирательного управления отбором мощности от двигателя, манетку управления дроссельной заслонкой для избирательного управления отбором мощности от двигателя и сиденье оператора, установленное с возможностью перемещения между позицией, ориентированной вперед, и позицией, ориентированной назад, при этом
транспортное средство имеет статический режим работы, в котором:
сиденье оператора ориентировано вперед,
двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, и/или стояночный тормоз включен, и
педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой,
транспортное средство имеет также экскаваторный режим работы, в котором:
сиденье оператора ориентировано назад,
двигатель отсоединен от движущих устройств, сцепляющихся с грунтом и манетку управления дроссельной заслонкой по умолчанию используют для управления дроссельной заслонкой.
Согласно другому аспекту настоящего изобретения обеспечено транспортное средство, содержащее двигатель, который может быть избирательно присоединен к движущим устройствам, сцепляющимся с грунтом, при этом указанное транспортное средство содержит педаль дроссельной заслонки для избирательного управления отбором мощности от двигателя, манетку управления дроссельной заслонкой для избирательного управления отбором мощности от двигателя и сиденье оператора, установленное с возможностью перемещения между позицией, ориентированной вперед, и позицией, ориентированной назад,
транспортное средство имеет транспортный режим работы, в котором:
сиденье оператора ориентировано вперед,
двигатель соединен с движущими устройствами, сцепляющимися с грунтом, и/или стояночный тормоз отключен, и
педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой,
транспортное средство имеет также экскаваторный режим работы, в котором:
сиденье оператора ориентировано назад,
двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, манетку управления дроссельной заслонкой по умолчанию используют для управления дроссельной заслонкой.
Согласно следующему аспекту настоящего изобретения обеспечено транспортное средство, содержащее двигатель, который может быть избирательно присоединен к движущим устройствам, сцепляющимся с грунтом, при этом транспортное средство содержит также педаль дроссельной заслонки для избирательного управления отбором мощности от двигателя, манетку управления дроссельной заслонкой для избирательного управления отбором мощности от двигателя и сиденье оператора, которое установлено с возможностью перемещения между позицией, ориентированной вперед, и позицией, ориентированной назад,
транспортное средство имеет статический режим работы, в котором:
сиденье оператора ориентировано вперед,
двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, и/или стояночный тормоз включен, и
педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой,
транспортное средство имеет транспортный режим работы, в котором:
сиденье оператора ориентировано вперед,
двигатель соединен с движущими устройствами, сцепляющими с грунтом, и/или стояночный тормоз отключен, и
педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой,
транспортное средство имеет также экскаваторный режим работы, в котором:
сиденье оператора ориентировано назад,
двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, и манетку управления дроссельной заслонкой по умолчанию используют для управления дроссельной заслонкой.
Согласно еще одному аспекту настоящего изобретения обеспечен способ управления транспортным средством по одному из предшествующих пунктов, включающий следующую операцию:
управление транспортным средством в статическом режиме работы с двигателем, работающим с частотой вращения в режиме холостого хода и с ручной установкой рабочей частоты вращения, превышающей частоту вращения двигателя в режиме холостого хода,
при этом указанный способ содержит также операцию перемещения сиденья в ориентированную назад позицию, чтобы осуществлять экскаваторный режим работы при увеличении частоты вращения двигателя до рабочей частоты вращения.
Краткое описание чертежей
Ниже только в качестве примера осуществления приведено описание изобретения со ссылками на прилагаемые чертежи, на которых показаны:
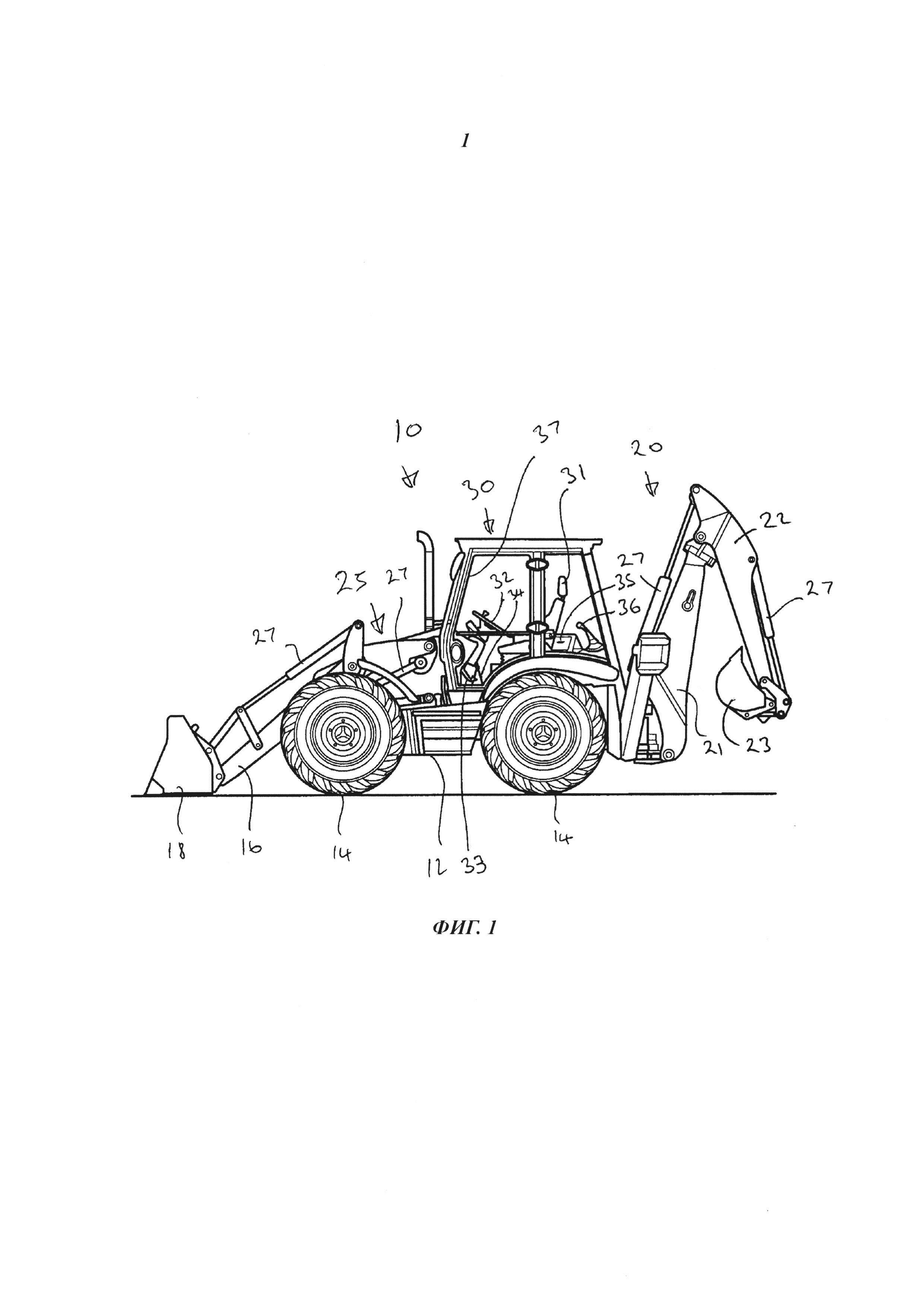
фигура 1 - вид сбоку транспортного средства согласно настоящему изобретению,
фигура 2 - вид сбоку транспортного средства с фигуры 1, при этом сиденье оператора ориентировано назад, и
фигура 3 - схематический вид сверху транспортного средства с фигур 1 и 2, показывающий различные направления, в которых может быть ориентировано сиденье.
Осуществление изобретения
На фигуре 1 показано землеройное транспортное средство в виде погрузчика 10 с обратной лопатой, содержащего ходовую часть 12, установленную с опорой на движущие устройства в виде колес 14, сцепляющихся с грунтом. На ходовой части установлен нагрузочный рычаг 16, к передней части которого прикреплен рабочий орган, в данном случае - погрузочный ковш 18. Нагрузочный рычаг и погрузочный ковш расположены спереди транспортного средства.
Позади транспортного средства установлена обратная лопата 20, содержащая стрелу 21, рукоять 22 и ковш 23. Транспортное средство содержит двигатель 25, который генерирует мощность, необходимую для движения транспортного средства по грунту. Кроме того, двигатель 25 обеспечивает также мощность, необходимую для работы гидравлического насоса, который может избирательно нагнетать рабочую жидкость в различные цилиндры 27 транспортного средства для управления нагрузочным рычагом, погрузочным ковшом, стрелой, черпаком, ковшом и т.п.с целью манипулирования материалом. Кроме того, транспортное средство содержит кабину 30 оператора, в которой предусмотрено сиденье 31 оператора. В кабине оператора расположены органы управления, в частности, рулевое колесо 32, педаль 33 тормоза, педаль 34 дроссельной заслонки, манетка 35 управления дроссельной заслонкой и рычаг 36 управления обратной лопатой.
Как показано на фигуре 1, сиденье 31 оператора ориентировано вперед. Сиденье оператора установлено с возможностью поворота и может быть повернуто в позицию, показанную на фигуре 2, где оно ориентировано на заднюю часть транспортного средства. Транспортное средство содержит датчик 40 позиции сиденья, который может определять, ориентировано ли сиденье вперед, как показано на фигуре 1, или назад, как показано на фигуре 2. При перемещении из позиции, показанной на фигуре 1, в позицию, показанную на фигуру 2, сиденье поворачивают против часовой стрелки на виде сверху. Датчик 40 позиции сиденья может определять одну или более промежуточных позиций сиденья между ориентированной вперед позицией, показанной на фигуре 1, и ориентированной назад позицией, показанной на фигуре 2.
Транспортное средство содержит дверь 37 кабины, расположенную на левой стороне транспортного средства. При этом, если оператор находится в кабине на сиденье, расположенном в позиции, показанной на фигуре 1, и оператору требуется выйти из кабины, то он может повернуть сиденье влево (т.е., против часовой стрелки на виде сверху), при этом сиденье поворачивается к двери (т.е., сиденье ориентируется частично вперед и частично - на левую часть транспортного средства). В этой позиции оператор может легко выйти из кабины через дверь. Альтернативно этому, если сиденье находится в начальной позиции, показанной на фигуре 1, и оператор должен управлять обратной лопатой, то он может повернуть сиденье на 180° в позицию, показанную на фигуре 2.
В некоторых случаях обратную лопату можно, в основном, использовать с левой стороны транспортного средства (если смотреть в переднем направлении транспортного средства) т.е., с правой стороны от оператора, если сиденье находится в позиции, показанной на фигуре 2. При таких условиях удобно немного повернуть сиденье по часовой стрелке (на виде сверху) из позиции, показанной на фигуре 2, в позицию, в которой сиденье частично ориентировано на заднюю часть транспортного средства и частично - на левую сторону транспортного средства.
На фигуре 3 показан схематический вид сверху погрузчика 10 с обратной лопатой. F указывает переднюю часть погрузчика с обратной лопатой, a R - заднюю часть погрузчика с обратной лопатой. LS обозначает левую сторону погрузчика с обратной лопатой. Стрелки 41, 42, 43, 44, 45 и 46 обозначают направления, в которых может быть ориентировано сиденье.
Таким образом, стрелка 41 обозначает сиденье, ориентированное вперед, как показано на фигуре 1. Стрелка 42 обозначает сиденье, ориентированное назад, как показано на фигуре 2. Стрелка 43 обозначает сиденье, ориентированное частично вперед и частично влево. Это позиция, в которой обычно находится сиденье, когда оператор выходит из кабины через дверь 37. Стрелки 44, 45 и 46 показывают направления, в которых сиденье может быть ориентировано, когда оператор использует обратную лопату, которая расположена, главным образом, с левой стороны транспортного средства. Стрелки 44, 45 и 46 обозначают сиденье, ориентированное частично назад и частично влево.
Датчик 40 позиции сиденья может определять положение сиденья в одной или более позициях 41, 42, 43, 44, 45 и 46, а также может определять положение сиденья в какой-либо промежуточной позиции между позициями 41 и 42. При этом может быть предусмотрен стопор сиденья для фиксации сиденья в одной или более позициях 41, 42, 43, 44, 45, 46 или в какой-либо промежуточной позиции.
Погрузчик с обратной лопатой имеет определенные режимы работы.
В частности, транспортное средство имеет статический режим работы. В этом режиме сиденье оператора ориентировано вперед, как показано на фигуре 1. Двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, например, коробка передач может быть в нейтральном положении, при этом двигатель не приводит во вращение колеса 14.
Транспортное средство имеет также режим транспортирования. В режиме транспортирования сиденье оператора повернуто вперед. Двигатель соединен с движущими устройствами, сцепляющими с грунтом, например, коробка передач находится в зацеплении, и двигатель вращает колеса 14 в переднем или заднем направлении.
Транспортное средство имеет также экскаваторный режим работы. В экскаваторном режиме работы сиденье оператора повернуто назад, как показано на фигуре 2. Двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, например, коробка передач находится в нейтральном положении.
Если конкретные требования режима работы выполнены, то управление двигателем осуществляют по умолчанию при помощи соответствующего органа управления дроссельной заслонкой. Так, при выполнении требований статического режима работы управление двигателем производят по умолчанию при помощи педали дроссельной заслонки. Если выполнены конкретные требования режима транспортирования, управление двигателем производят по умолчанию при помощи педали дроссельной заслонки. Если выполнены конкретные требования экскаваторного режима работы, управление двигателем производят по умолчанию при помощи манетки управления дроссельной заслонкой.
Для определенных режимов работы управление двигателем при помощи органа управления дроссельной заслонкой, установленного по умолчанию, может быть передано другому органу управлению. При этом после передачи управления от органа управления дроссельной заслонкой, установленного по умолчанию, управление может быть возвращено органу управления, установленному по умолчанию.
Рассмотрим следующую последовательность событий.
Сиденье оператора ориентировано вперед, а коробка передач находится в нейтральном положении. Двигатель работает в режиме холостого хода.
Оператор поворачивает сиденье назад. После выполнения этой операции условия экскаваторного режима работы оказываются выполненными и, соответственно, управление двигателем передается по умолчанию манетке управления дроссельной заслонкой. При этом, если манетка управления дроссельной заслонкой установлена на 1200 об/мин, то двигатель будет вращаться с частотой 1200 об/мин, а если манетка управления дроссельной заслонкой установлена на 2000 об/мин, то двигатель будет вращаться с частотой 2000 об/мин.
Если затем повернуть сиденье вперед, то условия статического режиме работы будут выполнены, и органом управления двигателем по умолчанию становится педаль дроссельной заслонки. Обычно во время поворота сиденья вперед нога оператора не находится на педали дроссельной заслонки, поэтому педаль дроссельной заслонки устанавливают на частоту вращения двигателя в режиме холостого хода и, следовательно, число оборотов двигателя будет снижаться до величины, соответствующей режиму холостого хода. Если оператор нажмет на педаль дроссельной заслонки и переведет ее в позицию, соответствующую 2000 об/мин, частота вращения двигателя увеличится до 2000 об/мин. Если оператор отпустит педаль, частота вращения двигателя возвратится к величине, соответствующей режиму холостого хода.
В статическом режиме работы можно передавать управление двигателем манетке управления дроссельной заслонкой, установив манетку управления дроссельной заслонкой при частоте вращения двигателя в режиме холостого хода выше текущего уровня частоты вращения двигателя, установленного педалью дроссельной заслонки. Следовательно, если позиция педали дроссельной заслонки соответствует режиму холостого хода, то установка манетки управления дроссельной заслонкой в позицию, соответствующую частоте вращения двигателя, превышающей частоту вращения в режиме холостого хода, приведет к передаче управления двигателем от педали дроссельной заслонки к манетке управления дроссельной заслонкой. После этого при помощи манетки управления дроссельной заслонкой можно увеличивать и уменьшать частоту вращения двигателя.
Управление двигателем может быть возвращено педали дроссельной заслонки путем простого воздействия на педаль дроссельной заслонки. Альтернативно этому управление двигателем может быть возвращено педали дроссельной заслонки путем воздействия на педаль тормоза. Альтернативно этому управление двигателем может быть передано педали дроссельной заслонки путем включения передачи. Причина возврата управления двигателем к педали дроссельной заслонки заключается в том, что при включении передачи выполняются условия режима транспортирования (т.е., сиденье ориентировано вперед, а двигатель соединен с движущими устройствами, сцепляющими с грунтом), и в этих условиях органом управления двигателем по умолчанию является педаль дроссельной заслонки.
В режиме транспортирования передача управления двигателем манетке управления дроссельной заслонкой невозможна.
Наличие органа управления дроссельной заслонкой, устанавливаемого по умолчанию, имеет определенные достоинства. Орган управления дроссельной заслонкой, устанавливаемый по умолчанию, является наиболее подходящим для большинства операций, выполняемых в данном режиме работы.
В статическом режиме, где используют внешний машинный инструмент, оператор может увеличивать частоту вращения двигателя при помощи педали дроссельной заслонки до уровня, подходящего для машинного инструмента. Затем оператор может передать управление от педали дроссельной заслонки манетке управления дроссельной заслонкой, несколько увеличив уровень частоты вращения, задаваемой манеткой управления дроссельной заслонкой, по сравнению с уровнем, задаваемым педалью дроссельной заслонки. Таким образом, оператор может быстро устанавливать и поддерживать частоту вращения двигателя, подходящую для работы машинного инструмента. Если требуется окончательная настройка частоты вращения двигателя, оператор может увеличивать или уменьшать частоту вращения двигателя, соответственно, при помощи манетки управления дроссельной заслонкой. Если оператору требуется передать управление частотой вращения двигателя педали дроссельной заслонки, то он может просто нажать на педаль дроссельной заслонки, после чего частота вращения двигателя будет определяться позицией педали дроссельной заслонки.
В режиме транспортирования орган управления дроссельной заслонкой по умолчанию (педаль дроссельной заслонки) является единственным органом управления двигателем, т.е., управление двигателем при помощи манетки управления дроссельной заслонкой является невозможным.
В качестве примера рассмотрим ситуацию, когда оператору требуется выкопать траншею. Оператор устанавливает транспортное средство в режиме транспортирования в позицию, с которой следует начинать прокладку траншеи. Затем оператор поворачивает сиденье на 180° и использует машину в экскаваторном режиме, чтобы выкопать первую часть траншеи. Спустя некоторое время оператору необходимо переместить машину вперед, чтобы продолжить копать траншею. Это осуществляют при помощи поворота сиденья вперед, перемещения машины вперед (в режиме транспортирования), возможно, на длину колесной базы машины, поворота сиденья назад и с последующим использованием машины в экскаваторном режиме, чтобы выкопать следующую часть траншеи. Затем оператор снова поворачивает сиденье, перемещает машину, опять поворачивает сиденье и продолжает выкапывать траншею до тех пор, пока она не достигнет требуемой длины.
Режим транспортирования и экскаваторный режим работы настоящего изобретения уменьшают усталость водителя следующим образом.
В качестве примера двигатель рабочей машины может иметь частоту вращения в режиме холостого хода, равную 800 оборотов в минуту (об/мин). При определенных обстоятельствах может оказаться необходимым, чтобы двигатель работал с частотой 2000 об/мин для использования обратной лопаты при выкапывании траншеи. При этих обстоятельствах манетка управления дроссельной заслонкой может установить работу двигателя с частотой вращения 2000 об/мин. Важно, что манетка управления дроссельной заслонкой может быть оставлена на этой настройке, поэтому оператору не нужно ее изменять. Таким образом, при выкапывании траншеи происходит следующая последовательность событий.
Во время маневрирования машины в режиме транспортирования для того, чтобы установить обратную лопату в начальное положение для выкапывания траншеи, поскольку в режиме транспортирования педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой, когда оператор убирает ногу с педали дроссельной заслонки, частота вращения двигателя возвращается к режиму холостого хода, и, если оператору необходимо переместить транспортное средство вперед или назад, педаль дроссельной заслонки можно использовать для изменения скорости движения транспортного средства. После установки транспортного средства в нужную позицию оператор поворачивает сиденье в направлении против часовой стрелки. Поскольку оператор находится на сиденьи, во время поворота оператора вместе с сиденьем правая нога оператора, которая управляет педалью дроссельной заслонки, естественно, отпускает педаль дроссельной заслонки, при этом частота вращения двигателя возвращается в режим холостого хода, если двигатель заранее не работал в этом режиме. Поскольку датчик 40 позиции сиденья определяет, что сиденье ориентировано назад, транспортное средство начинает работать в экскаваторном режиме. Поскольку в экскаваторном режиме работы манетку управления дроссельной заслонкой по умолчанию используют для управления дроссельной заслонкой, и поскольку манетка управления дроссельной заслонкой заранее была установлена на 2000 об/мин, поворот сиденья из передней позиции в заднюю позицию приводит к увеличению частоты вращения двигателя от режима холостого хода (800 об/мин) до 2000 об/мин. Таким образом, как только сиденье поворачивают в позицию, ориентированную назад, частота вращения двигателя возрастает до величины, пригодной для работы обратной лопаты, и оператор может непосредственно начать выкапывание траншеи. Важно, что при повороте сиденья в позицию, ориентированную назад, оператору не требуется использовать ручное управление для увеличения частоты вращения двигателя (поскольку это осуществляется автоматически при выполнения критерия экскаваторного режима работы), что позволяет экономить время.
После того, как будет выкопана первая часть траншеи, оператор поворачивает сиденье из позиции, ориентированной назад, в позицию, ориентированную вперед. При этом машина из экскаваторного режима работы вначале возвращается в статический режим, поскольку сиденье будет ориентировано вперед. Это означает, что педаль дроссельной заслонки будет управлять частотой вращения двигателя, которая при этом уменьшится с 2000 об/мин до частоты вращения двигателя в режиме холостого хода, составляющей 800 об/мин. Такая частота вращения двигателя в режиме холостого хода является пригодной для работы в режиме транспортирования. Таким образом, при повороте сиденья в переднюю позицию, частота вращения двигателя уменьшается до 800 об/мин, что соответствует режиму холостого хода, при этом оператор может непосредственно использовать машину в режиме транспортирования для перемещения транспортного средства по грунту. Поскольку в режиме транспортирования органом управления дроссельной заслонкой по умолчанию является педаль дроссельной заслонки, изменение частоты вращения двигателя осуществляют при помощи педали дроссельной заслонки. После установки машины в новую позицию оператор поворачивает сиденье из позиции, ориентированной вперед, в позицию, ориентированную назад, что приводит к увеличению частоты вращения двигателя от величины, соответствующей режиму холостого хода, до частоты 2000 об/мин, заданной манеткой управления дроссельной заслонкой, при этом машина может незамедлительно продолжить выкапывание траншеи. Таким образом, если манетка управления дроссельной заслонкой имеет определенную установку (в данном примере 2000 об/мин), то вся траншея может быть выкопана без необходимости для оператора даже касаться или регулировать манетку управления дроссельной заслонкой. Что касается оператора, то в случае сиденья, ориентированного вперед, двигатель будет работать с частотой вращения, соответствующей режиму холостого хода, если оператор не управляет педалью дроссельной заслонки, и это - нормально ожидаемый рабочий режим с ориентированным вперед сиденьем (аналогично управлению автомобилем). Если сиденье ориентировано назад, двигатель будет работать с рабочей частотой вращения, которая требуется оператору (в данном случае 2000 об/мин) и которая установлена манеткой управления дроссельной заслонкой. Таким образом, усталость оператора уменьшается, поскольку двигатель автоматически работает с частотой, соответствующей направлению ориентации сиденья.
В предпочтительном варианте осуществления транспортные средства согласно настоящему изобретению могут также иметь функцию автоматического включения холостого хода. Как указано выше, функция автоматического включения холостого хода реализуется, если манетку управления дроссельной заслонкой используют для установки рабочей частоты вращения двигателя, превышающей частоту вращения в режиме холостого хода.
Функция автоматического включения холостого хода может быть разблокирована или заблокирована в зависимости от предпочтений оператора.
Выкапывание траншея или т.п. часто производят с участием вспомогательного рабочего, который находится снаружи от кабины, иногда в траншее или вблизи траншеи или т.п. Вспомогательный рабочий может следить за закопанными водопроводными трубами, газопроводными трубами, электрическими кабелями или другими закопанными предметами, которых не должен касаться рабочий орган машины и которые могут быть плохо заметными для оператора. При этом важно обеспечить общение между оператором машины и вспомогательным рабочим. Предпочтительно, чтобы машина имела функцию автоматического включения холостого хода, и чтобы она была разблокирована, если выполнены критерии экскаваторного режима работы, тогда функция автоматического включения холостого хода может уменьшать частоту вращения двигателя ниже уровня, установленного манеткой управления дроссельной заслонкой. Обычно при автоматическом включении холостого хода частота вращения двигателя уменьшается до величины, соответствующей частоте вращения в режиме холостого хода.
При этих условиях рассмотрим сценарий, когда выкапывание траншеи производят с участием вспомогательного рабочего, и машина передвинута вперед, чтобы выкапывать другую часть траншеи. Когда оператор начинает поворачивать сиденье в экскаваторную позицию, его нога удаляется с педали дроссельной заслонки, и двигатель начинает работать с частотой вращения, соответствующей режиму холостого хода (если он до того не работал с частотой вращения в режиме холостого хода). Когда сиденье достигает позиции, ориентированной назад, выполняются критерии экскаваторного режима работы, но, кроме того, функция автоматического включения холостого хода уменьшает частоту, заданную манеткой управления дроссельной заслонкой. В одном примере, когда сиденье достигает позиции, ориентированной назад, частота вращения двигателя не увеличивается до 2000 об/мин (в соответствии с установкой манетки управления дроссельной заслонкой), а остается равной частоте вращения двигателя в режиме холостого хода (800 об/мин). Поскольку двигатель вращается медленнее, он создает меньше шума, и у оператора машины есть возможность общения со вспомогательным рабочим. После того, как они решат продолжить копать траншею, и оператор машины начнет работать с обратной лопатой, система автоматического включения холостого хода автоматически переключает частоту вращения двигателя в соответствии с установкой манетки управления дроссельной заслонкой (на рабочую частоту вращения, в данном случае - 2000 об/мин). При этом очевидно, что такое управление машиной не требует от оператора регулировки манетки управления дроссельной заслонкой и поэтому обеспечивает экономию времени.
Как указано выше, в транспортных средствах согласно настоящему изобретению во время режима транспортирования манетку управления дроссельной заслонкой нельзя использовать для управления частотой вращения двигателя. Соответственно, манетка управления дроссельной заслонкой не может быть использована для регулирования скорости движения. При этом транспортные средства согласно настоящему изобретению могут содержать устройство фиксации оборотов, приводимое в действие оператором (в частности, кнопку, переключатель или т.п.), которое при срабатывании поддерживает текущую частоту вращения двигателя или стремится обеспечить требуемую частоту вращения двигателя, задаваемую педалью дроссельной заслонки. Такое устройство может служить для регулирования скорости движения. Таким образом, когда оператор обеспечит требуемую скорость транспортного средства, которая соответствует конкретной частоте вращения двигателя на конкретной передаче, он может включить устройство стабилизации скорости, чтобы поддерживать частоту вращения двигателя, и, следовательно, скорость транспортного средства. Устройство стабилизации скорости может быть отключено оператором и/или в результате срабатывания педали тормоза и/или срабатывания рычага стояночного тормоза или т.п.и/или отсоединения двигателя от движущих устройств, сцепляющихся с грунтом, например, при переключении коробки передач в нейтральное положение. Устройство стабилизации скорости может быть также отключено при помощи педали дроссельной заслонки, например, путем нажатия и немедленного освобождения педали дроссельной заслонки.
Транспортное средство может содержать различные датчики, например, датчик позиции педали дроссельной заслонки, датчик позиции манетки управления дроссельной заслонкой, датчик позиции сиденья (как указано выше), датчик нейтрального положения коробки передач. Педаль дроссельной заслонки может быть механически соединена с двигателем для управления частотой вращения двигателя. Манетка управления дроссельной заслонкой также может быть механически соединена с двигателем для управления частотой вращения двигателя.
Педаль дроссельной заслонки может не иметь механического соединения с двигателем. Манетка управления дроссельной заслонкой также может не иметь механического соединения с двигателем. Педаль дроссельной заслонки может содержать датчик педали дроссельной заслонки, который определяет позицию педали дроссельной заслонки, соответствующую требуемой частоте вращения двигателя. Манетка управления дроссельной заслонкой может содержать датчик манетки управления дроссельной заслонкой, который определяет позицию манетки управления дроссельной заслонкой, соответствующую требуемой частоте вращения двигателя. Сигналы от датчика педали дроссельной заслонки и/или датчика манетки управления дроссельной заслонкой могут поступать в блок управления. Сигналы от датчика позиции сиденья также могут поступать в блок управления. Кроме того, в блок управления могут поступать сигналы датчика нейтрального положения коробки передач. В зависимости от сигналов, полученных блоком управления, блок управления может определять режим работы транспортного средства.
Как описано выше, двигатель может быть соединен с движущимися устройствами, сцепляющими с грунтом, при помощи коробки передач, которая обеспечивает перемещение в переднем или заднем направлении. Изобретение не ограничено транспортными средствами, содержащими коробки передач с передачами переднего и заднего хода. В другом варианте осуществления транспортное средство может содержать гидростатическую трансмиссию, которая может обеспечивать вращение колес в переднем и заднем направлении при помощи нагнетания рабочей жидкости, что хорошо известно специалистам в данной области техники.
Как указано выше, в режиме транспортирования оператор ориентирован вперед, а двигатель соединен с движущими устройствами, сцепляющими с грунтом. В альтернативном режиме транспортирования оператор ориентирован вперед, управляемое оператором устройство, указывающее на намерение перемещать транспортное средство, активировано. Примером такого управляемого оператором устройства, указывающего на намерение перемещать транспортное средство, является включение передачи в коробке передач. Альтернативно этому отпускание стояночного тормоза является показателем намерения перемещать транспортное средство. Альтернативно этому, если транспортное средство содержит гидростатическую трансмиссию, перемещение органа управления, который приводит в действие гидростатическую трансмиссию таким образом, что транспортное средство может перемещаться вперед или назад, является показателем намерения перемещать транспортное средство.
Реферат
Группа изобретений относится к рабочему транспортному средству. Технический результат – простота и легкость в управлении транспортным средством. Транспортное средство содержит двигатель, выполненный с возможностью избирательного присоединения к движущим устройствам, сцепляющимся с грунтом, а также содержащее педаль дроссельной заслонки для избирательного управления отбором мощности от двигателя, манетку управления дроссельной заслонкой для избирательного управления отбором мощности от двигателя и сиденье оператора, установленное с возможностью перемещения между позицией, ориентированной вперед, и позицией, ориентированной назад. При этом транспортное средство имеет статический режим работы, в котором: сиденье оператора ориентировано вперед, двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, и/или стояночный тормоз включен, и педаль дроссельной заслонки по умолчанию используют для управления дроссельной заслонкой. При этом транспортное средство имеет экскаваторный режим работы, в котором сиденье оператора ориентировано назад, двигатель отсоединен от движущих устройств, сцепляющихся с грунтом, и манетку управления дроссельной заслонкой по умолчанию используют для управления дроссельной заслонкой. 4 н. и 28 з.п. ф-лы, 3 ил.
Комментарии