Строительная машина с улучшенной эргономикой органов управления - RU2556802C2
Код документа: RU2556802C2
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к строительным машинам. Более конкретно, оно относится к таким машинам, на которых имеется рабочее место оператора с креслом водителя, которое может поворачиваться вокруг вертикальной оси по меньшей мере из первого рабочего положения во второе рабочее положение с переходом через промежуточное положение, а также по меньшей мере первый орган управления, который может использоваться оператором по меньшей мере для выполнения некоторых операций по меньшей мере в одном положении кресла для управления рабочим оборудованием.
Уровень техники
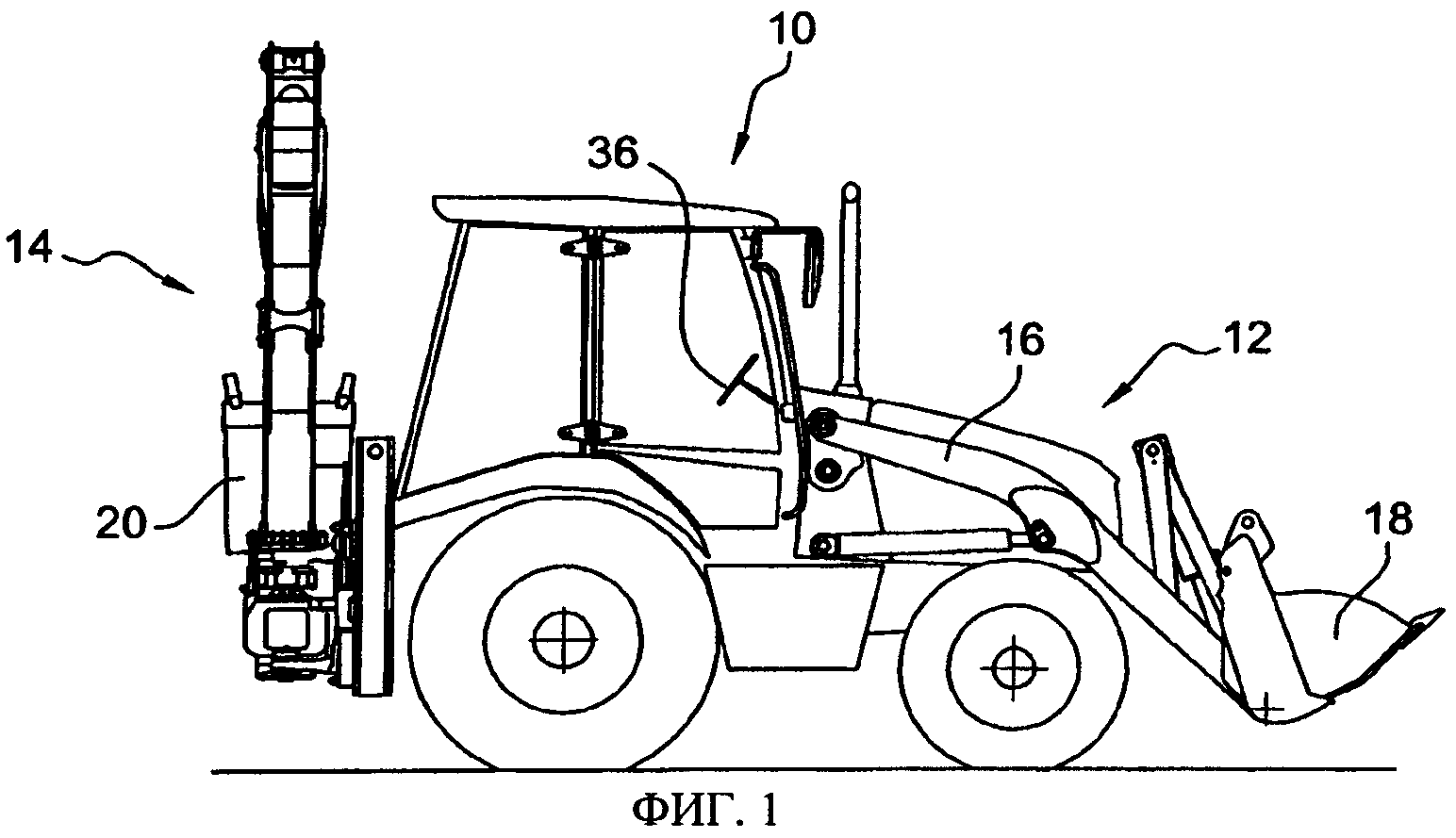
Примером такой машины является так называемый погрузчик с обратной лопатой, показанный на фиг.1. Такая машина имеет шасси, установленное на четырех колесах, и кабину 10 или рабочее место оператора, установленное на шасси для размещения оператора машины. Свое название эта машина получила благодаря тому, что имеет две основные единицы рабочего оборудования, а именно погрузочный механизм 12 спереди и обратную лопату 14 сзади. Основными частями погрузочного механизма 12 являются два рычага 16 погрузчика, которые шарнирно прикреплены к шасси и отходят в продольном направлении вперед, и на свободных концах рычагов 16 установлен ковш 18 погрузчика. Оборудование 14 обратной лопаты включает механизм обратной лопаты, который шарнирно прикреплен к шасси и на свободном конце которого закреплен основной рабочий орган, такой как экскаваторный ковш 20. Работа обоих механизмов обеспечивается гидравлическими цилиндрами, которыми управляет оператор, находящийся в кабине, с помощью органов управления. На погрузчиках с обратной лопатой устанавливается поворотное кресло, так что оператор поворачивается лицом вперед, когда он управляет движением машины и/или работой погрузочного механизма, или назад, когда используется механизм обратной лопаты.
Обычно на погрузчике с обратной лопатой имеются две группы органов управления, одна из которых относится к переднему оборудованию, и ее размещают так, чтобы она была в пределах досягаемости для оператора, когда он смотрит вперед, и к заднему оборудованию относится другая группа органов управления, которая размещается в пределах досягаемости оператора, когда он смотрит назад. Например, погрузочным механизмом можно управлять с помощь лишь одной ручки типа джойстика, в то время как для управления механизмом обратной лопаты необходимы два джойстика, которые оператор использует одновременно (работает двумя руками).
Вышеописанные погрузчики с обратной лопатой хорошо известны специалистам. В качестве примера можно привести имеющийся на рынке погрузчик "Volvo BL 71".
В документе US 4,934,462 раскрывается устройство управления для машины, выполняющей две функции, при этом кресло оператора оборудовано двумя органами управления, которые постоянно соединены с креслом и находятся перед его подлокотниками. Для обеспечения выполнения первой функции, когда кресло находится в первом положении, и для выполнения второй функции, когда кресло находится во втором положении, используется переключающее устройство. Следует отметить, что второй орган управления отключается, когда кресло находится во втором положении, однако, тем не менее, он остается в прежнем положении относительно кресла, находящегося во втором положении, когда он не используется. Таким образом, во втором положении кресла необязательное присутствие второго органа управления может быть помехой для оператора, например, при необходимости сесть в кресло или встать с него или при использовании другого органа управления, такого как, например, рулевое колесо.
В документе EP 1,264,940 раскрывается погрузчик с обратной лопатой, на котором используется первый орган управления, соединенный с креслом, и второй орган управления, который не соединен с креслом, так что он не перемещается вместе с креслом, когда оно поворачивается вокруг своей вертикальной оси. Поэтому второй орган управления в положении кресла, в котором он не нужен, не будет помехой. С другой стороны, поскольку второй орган управления имеет фиксированное положение при поворотах кресла вокруг вертикальной оси, он менее удобен для использования оператором, если оператор захочет работать, когда кресло находится под некоторым углом от точного направления назад, например, при выемке грунта, находящегося немного в стороне от этого направления.
Целью настоящего изобретения является новая компоновка кабины оператора строительной машины, которая более эргономична для использования и работы.
Раскрытие изобретения
В настоящем изобретении предлагается строительная машина, включающая рабочее место оператора с креслом водителя, которое может поворачиваться вокруг вертикальной оси по меньшей мере из первого рабочего положения во второе рабочее положение с переходом через промежуточное положение, причем машина снабжена по меньшей мере первым органом управления, который может использоваться оператором для выполнения по меньшей мере некоторых операций, и по меньшей мере в одном положении кресла для управления гидравлическим рабочим оборудованием, отличающаяся тем, что когда кресло перемещается между первым положением и по меньшей мере промежуточным положением, первый орган управления формирует первую конфигурацию с креслом, занимая рабочее положение относительно кресла, и когда кресло находится во втором положении, орган управления смещается, формируя вторую конфигурацию, в которой он передвинут в нерабочее положение.
В изобретении также предлагается устройство кресла для строительной машины, включающее:
- опору, на которой установлено кресло с возможностью поворота вокруг вертикальной оси;
- кронштейн органа управления, который установлен с возможностью поворота вокруг указанной оси относительно кресла и опоры кресла;
- контактный элемент на кресле для зацепления с кронштейном органа управления;
- смещающий элемент для смещения опорного кронштейна в направлении контактного элемента;
- упор-ограничитель опоры кресла для ограничения перемещения опорного кронштейна.
В другом варианте машина включает:
- кресло, установленное с возможностью поворота вокруг вертикальной оси по меньшей мере из первого рабочего положения во второе рабочее положение с прохождением через промежуточное положение;
- датчик положения кресла для определения по меньшей мере промежуточного положения кресла;
- кронштейн первого органа управления, который установлен с возможностью перемещения перемещающим устройством относительно кресла из рабочего положения в нерабочее положение;
- средство управления перемещающим устройством таким образом, что орган управления удерживается в рабочем положении, когда кресло перемещается между первым положением и по меньшей мере промежуточным положением, и перемещается в нерабочее положение, когда кресло перемещается за промежуточное положение.
Краткое описание чертежей
Фиг.1 - вид сбоку погрузчика с обратной лопатой, в котором может быть реализовано настоящее изобретение;
фиг.2, 3 - виды сверху внутреннего пространства кабины погрузчика с обратной лопатой, соответственно, для первого и второго рабочих положений кресла, в первом варианте осуществления изобретения;
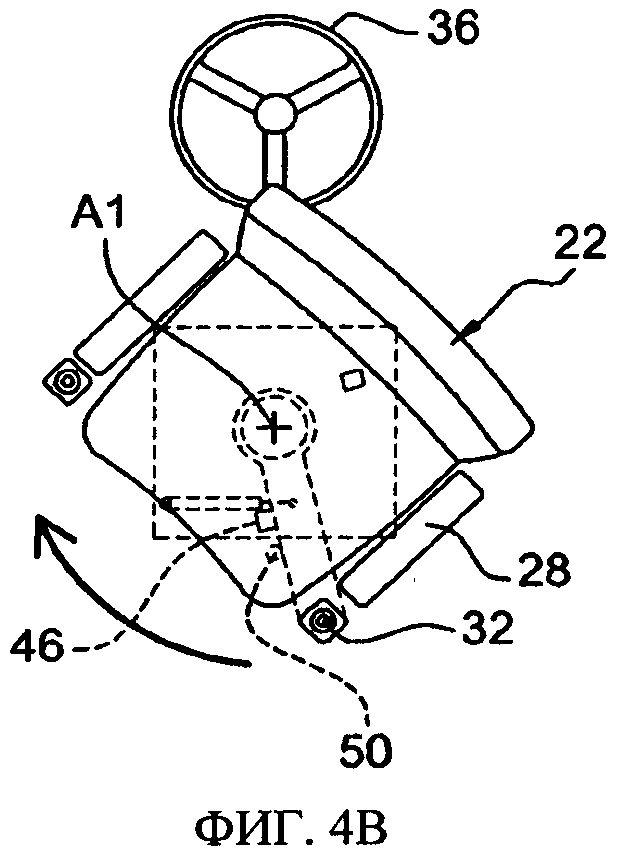
фиг.4А-4Д - виды разных положений кресла и соответствующего положения первого органа управления по одному из вариантов осуществления изобретения;
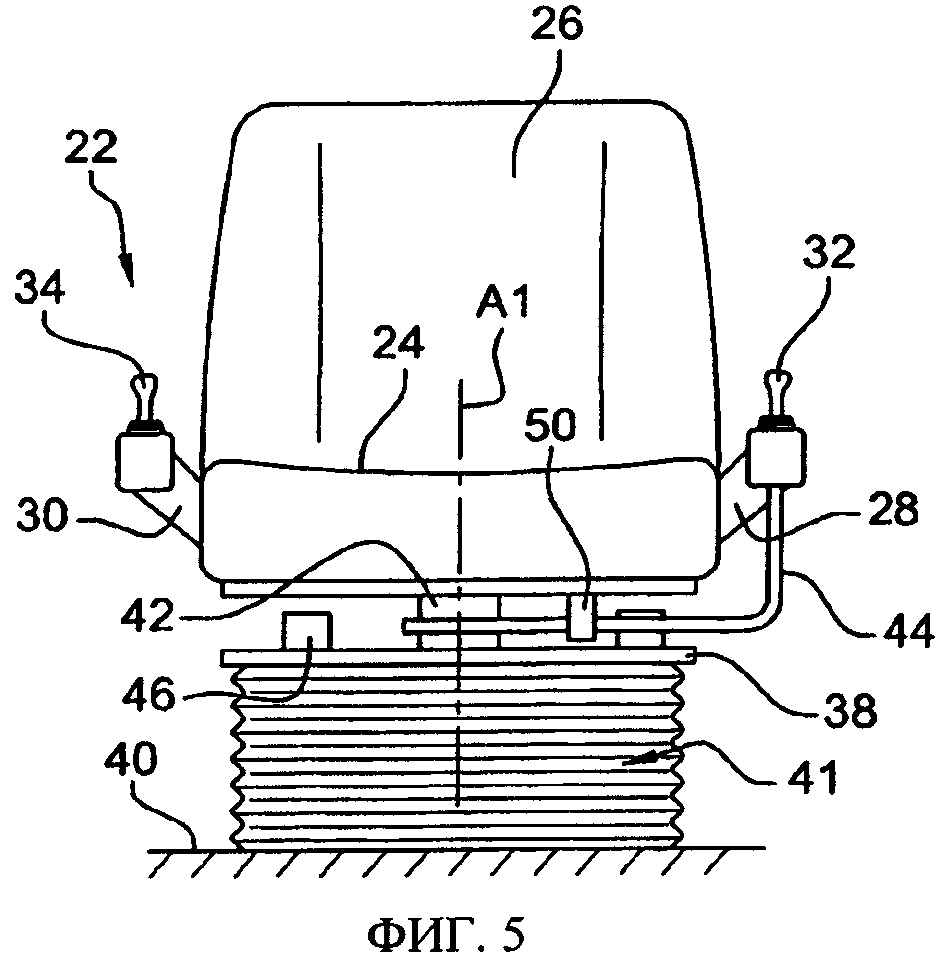
фиг.5, 6 - схематические виды спереди и сверху, соответственно, устройства кресла, содержащего кронштейн для органа управления по одному из вариантов осуществления изобретения;
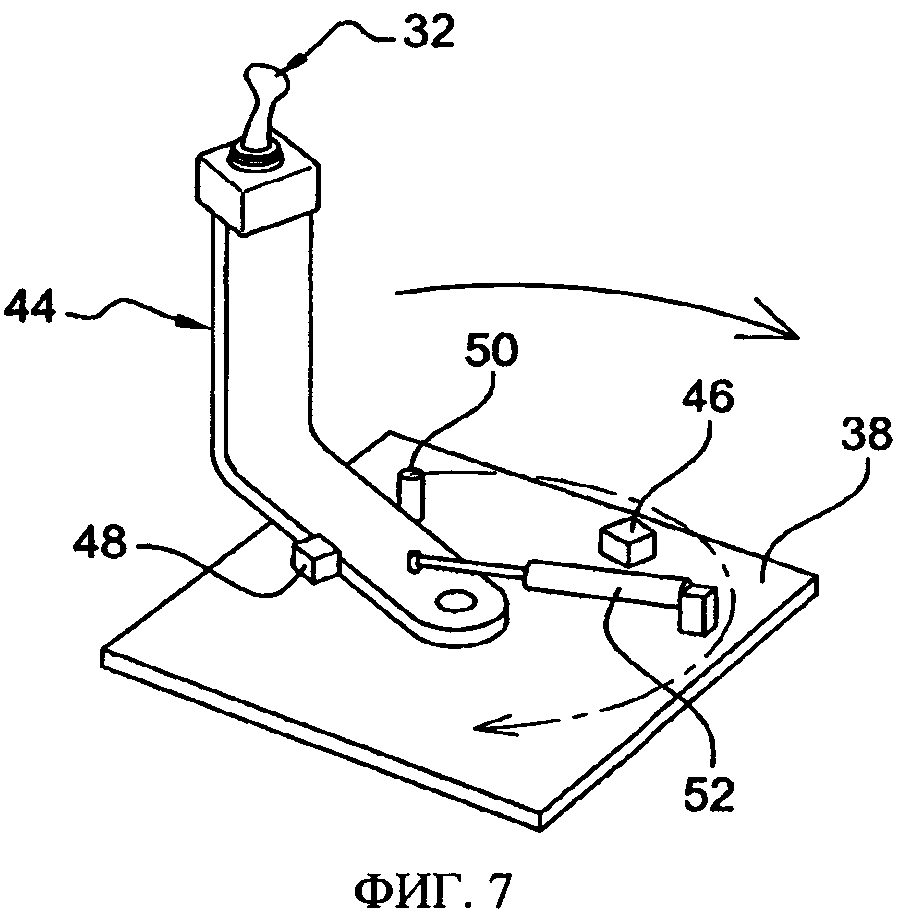
фиг.7 - схематический вид в перспективе некоторых элементов устройства кресла, показанного на фиг.5 и 6;
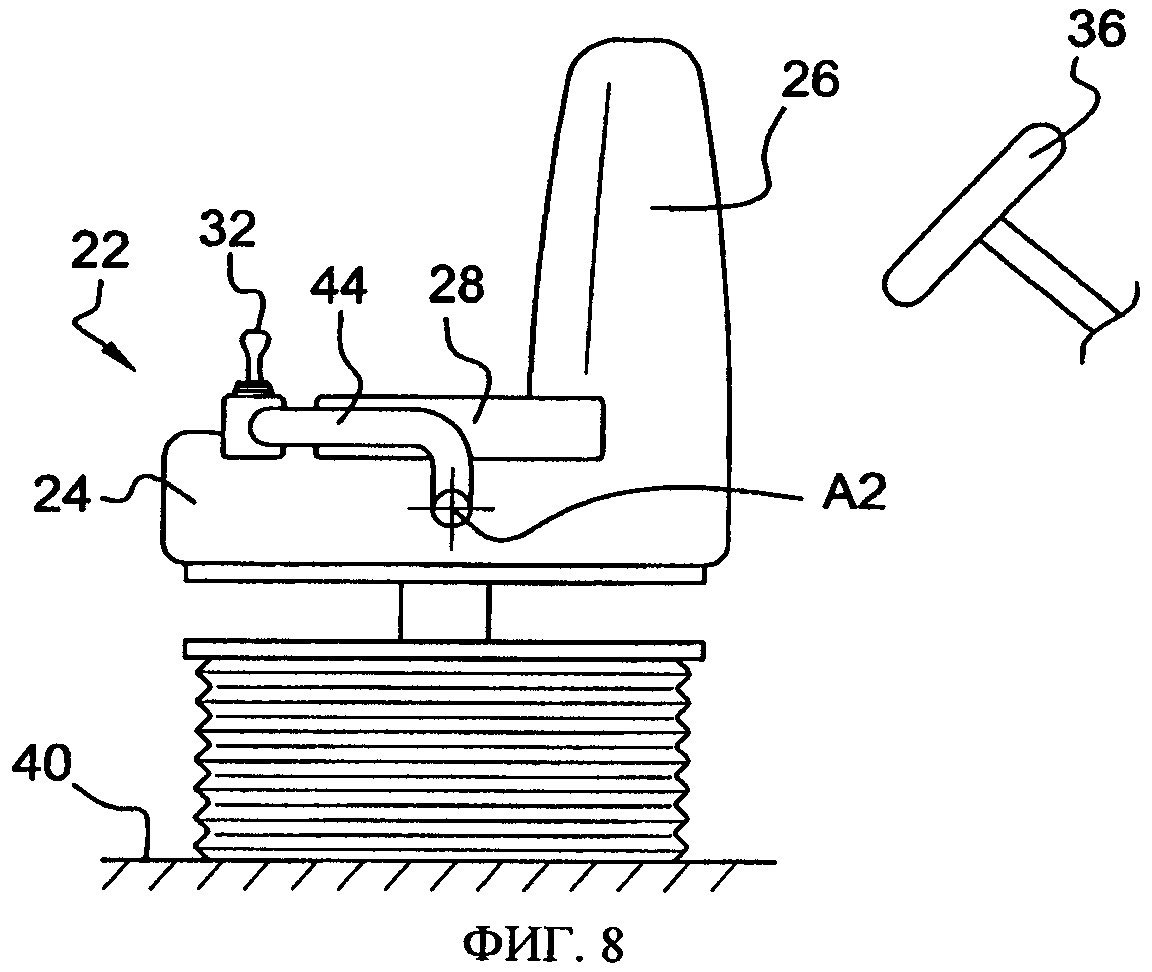
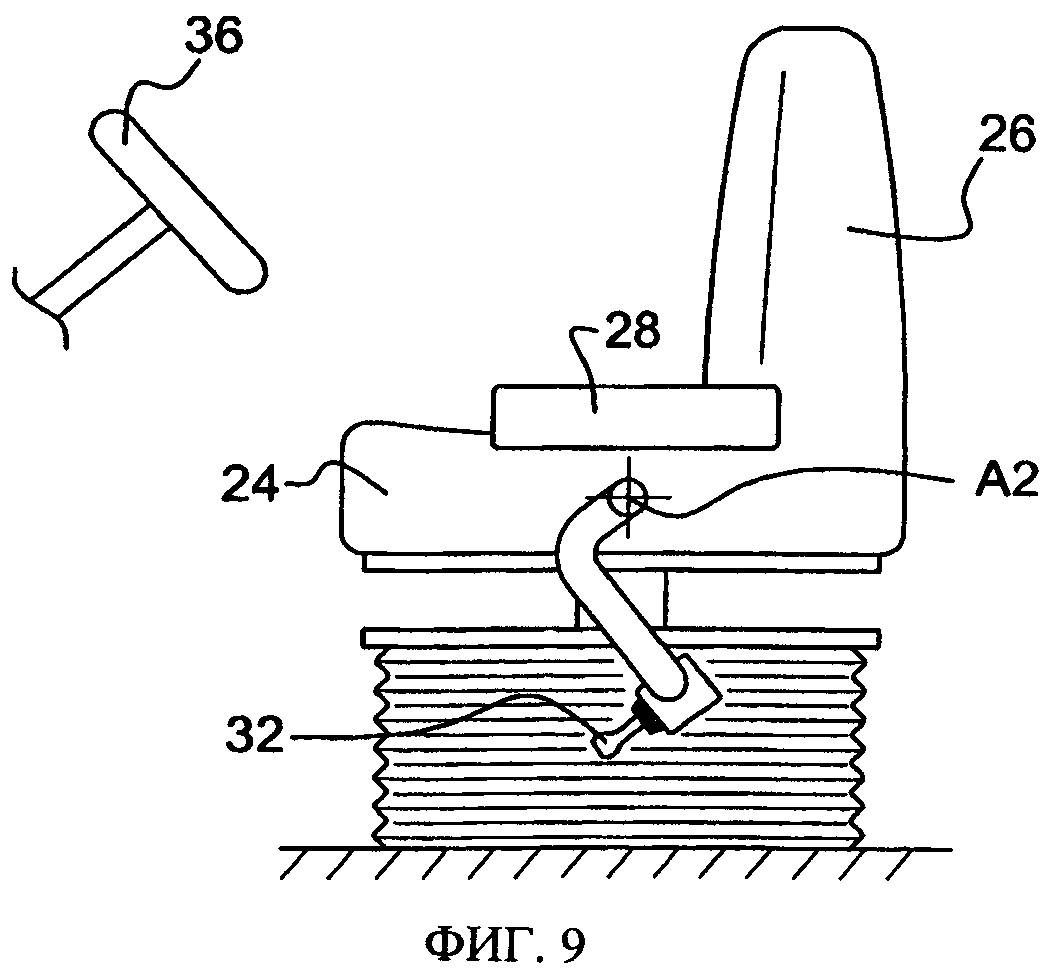
фиг.8, 9 - виды сбоку второго варианта осуществления изобретения с креслом, оборудованным органом управления, который может быть перемещен относительно кресла из рабочего положения в нерабочее положение.
Подробное описание осуществления изобретения
На фиг.2, 3 схематично показано внутреннее пространство кабины 10 по первому варианту осуществления изобретения, причем особенно подробно показано кресло 22, содержащее сиденье 24, спинку 26, первый подлокотник 28 и второй подлокотник 30, причем кресло может быть зафиксировано внутри кабины 10 по меньшей мере в двух рабочих положениях. Например, на фиг.2 кресло 22 показано в первом рабочем положении, которое оператор использует при работе с механизмом 14 обратной лопаты. В этом случае оператор, сидящий в кресле, смотрит назад. При этом оператору доступны первый орган 32 управления и второй орган 34 управления, и он может использовать их для управления механизмом обратной лопаты. В рассматриваемом примере оба органа 32, 34 управления имеют форму джойстика и расположены перед соответствующими подлокотниками 28, 30, так что оператор может легко манипулировать этими органами управления, используя правую и левую руки. Таким образом, оба органа управления находятся в рабочем положении относительно кресла, так что оператору удобно ими пользоваться, предпочтительно без необходимости отрывать предплечья рук от соответствующих подлокотников. На фиг.3 показано второе рабочее положение кресла 22, в котором оператору удобно работать при использовании переднего погрузочного механизма 12 или когда он управляет движением машины с помощью рулевого колеса 36, расположенного в передней части кабины. В этом случае оператор, сидящий в кресле, предпочтительно смотрит вперед.
В кабине могут быть расположены и другие компоненты, включая другие органы управления или панели приборов, которые на фиг.2, 3 не показаны.
В рассматриваемом примере перемещение кресла между первым и вторым рабочими положениями представляет собой поворот кресла на 180 градусов вокруг вертикальной оси А1, которая примерно проходит через центр сиденья 24 кресла 22. Однако следует отметить, что первое и второе положения кресла могут быть и другими. Например, в зависимости от типа машины угловое расстояние между этими двумя положениями может составлять 90 градусов. Кроме того, перемещение кресла между двумя положениями необязательно является только поворотом, как в рассматриваемом примере, а может включать более сложные движения в горизонтальной плоскости. Такое перемещение может обеспечиваться более сложными кинематическими схемами, однако оно должно содержать поворот вокруг воображаемой вертикальной оси, например, это может быть комбинация вращения и поступательного движения. В любом случае перемещение кресла между двумя рабочими положениями включает прохождения через промежуточные положения.
Как показано на фиг.3, во втором рабочем положении кресла, положение по меньшей мере одного органа управления, в данном случае органа 32 управления, отличается от его положения относительно кресла в его первом рабочем положении. Во втором рабочем положении кресла первый орган управления находится вне зоны удобной досягаемости оператора, когда он сидит в кресле 22, и поэтому первый орган управления находится в нерабочем положении относительно кресла. Он находится в нерабочем положении и при этом не мешает оператору. Тем не менее, следует отметить, что соответствующий подлокотник 28 поворачивается вместе с креслом при его перемещении во второе положение, так что оператор может в этом втором положении использовать этот подлокотник, не имея при этом больше доступа к соответствующему органу 32 управления. Иными словами, во втором рабочем положении кресла первый орган 32 управления удален от соответствующего подлокотника 28.
С другой стороны, в этом конкретном примере можно видеть, что второй орган 34 управления может перемещаться вместе с креслом при его перемещении из первого рабочего положения во второе рабочее положение, например, поскольку этот второй орган управления может использоваться в первом рабочем положении кресла для управления первым орудием, в данном случае механизмом 14 обратной лопаты, и во втором рабочем положении кресла для управления вторым орудием, погрузочным механизмом 12. В рассматриваемом варианте второй орган управления может просто перемещаться соответствующим подлокотником или же он может быть иным образом постоянно соединен с креслом.
Поэтому в данном варианте второй орган управления фиксирован относительно кресла, какое бы положение оно ни занимало.
На фиг.4А-4Д показано, как при перемещении кресла между первым положением и по меньшей мере промежуточным положением первый орган управления формирует первую конфигурации с креслом, так что он находится в рабочем положении (то есть, оператор может им пользоваться), и когда кресло находится во втором положении, орган управления смещается, формируя с креслом вторую конфигурацию, в которой он передвинут в нерабочее положение (то есть, оператор уже не может им пользоваться). Более конкретно, в первой конфигурации кресла и органов управления первый орган 32 управления может перемещаться вместе с креслом 22, когда оно перемещается из первого положения в промежуточное положение, и во второй конфигурации первый орган 32 управления может быть отсоединен от кресла и будет находиться в положении резерва, когда кресло находится во втором положении.
На фиг.4Г кресло находится в первом положении. Как можно видеть, в этом случае первый орган 32 управления находится в положении, оптимальном с эргономической точки зрения для его использования оператором, например, орган 32 управления может представлять собой продолжение соответствующего подлокотника.
На фиг.4В кресло 22 показано в промежуточном положении между первым и вторым рабочими положениями. Как можно видеть, в этом положении кресла первый орган 32 управления находится примерно в том же положении относительно кресла, в котором он находился в первом рабочем положении кресла. Иными словами, положение органа управления, в котором им может пользоваться оператор, это фиксированное положение относительно кресла, пока оно находится между первым рабочим положением и промежуточным положением. Таким образом, в рассматриваемом примере первый орган 32 управления соединен с креслом, так что он будет перемещаться вместе с креслом, когда оно перемещается между первым рабочим положением и промежуточным положением. Предпочтительно это соединение поддерживается все время, пока кресло находится в любом положении между первым рабочим положением и промежуточным положением. В результате первый орган 32 управления перемещается вместе с креслом 22 между первым положением, соответствующим первому рабочему положению кресла 22, показанному на фиг.4Г, и конечным положением, соответствующим промежуточному положению кресла 22, показанному на фиг.4В. Соединение органа управления с креслом может быть механическим соединением, как это будет описано далее в рассматриваемом примере, или же может быть обеспечено любой другой системой, способной перемещать первый орган 32 управления относительно кабины 10 вместе с перемещением кресла 22 относительно кабины вокруг вертикальной оси А1. Например, первый орган управления может перемещаться приводом, управление которым осуществляется в автоматическом режиме в соответствии с перемещениями кресла. Перемещение кресла может отслеживаться, например, с помощью соответствующих датчиков, или же в случае перемещения кресла между первым и вторым рабочими положениями с помощью привода управление приводами кресла и органа управления может осуществляться таким образом, чтобы кресло и орган управления перемещались вместе.
На фиг.4Б показано кресло, находящееся между промежуточным положением и вторым рабочим положением, показанным на фиг.4А. Как можно видеть, между промежуточным положением и вторым рабочим положением первый орган управления сместился, формируя вторую конфигурацию, в которой в рассматриваемом варианте первый орган управления уже не перемещается вместе с креслом. Иными словами, можно сказать, что первый орган управления отсоединяется от кресла при дальнейшем перемещении кресла из промежуточного положения во второе рабочее положение.
Переход из первой конфигурации, в которой орган управления перемещается вместе с креслом, во вторую конфигурацию, в которой орган управления больше не перемещается вместе с креслом, может быть выполнен вручную оператором, например, путем размыкания соединительного механизма или же выключения программы в блоке управления приводом органа управления. В предпочтительном варианте осуществления изобретения отсоединение первого органа управления от кресла осуществляется автоматически, когда кресло из промежуточного положения начинает перемещаться во второе рабочее положение. Управление таким автоматическим отсоединением может осуществляться исключительно механическими средствами, как это будет описано в следующем примере, или же для этого может использоваться электронная система отсоединения.
Когда кресло возвращается из второго рабочего положения в первое рабочее положение, в предпочтительных вариантах орган управления возвращается в первую конфигурацию, то есть в рассматриваемом примере снова соединяется с креслом. Такое повторное соединение может осуществляться водителем вручную путем выполнения определенного действия. Однако в предпочтительных вариантах повторное соединение выполняется автоматически. В этом случае возможны различные варианты. Такое повторное соединение может выполняться автоматически, когда оператор снова берется за первый орган управления при нахождении кресла в первом рабочем положении или возле него. Или же, как в рассматриваемом варианте, повторное соединение может инициироваться автоматически возвращением кресла в заданное положение или в диапазон положений, без каких-либо действий со стороны оператора.
Следует отметить, что промежуточное положение кресла, являющееся границей, до которой орган управления перемещается вместе с креслом, может быть зафиксировано для заданной машины. В других вариантах это положение может быть регулируемым для обеспечения возможности оператору адаптации этого положения к особенностям управления машиной и/или к особенностям выполняемой работы.
В варианте осуществления изобретения, иллюстрируемом на фиг.2-7, на фиг.4А-4Б можно видеть, что когда кресло 22 находится между промежуточным положением и вторым рабочим положением, первый орган 32 управления удерживается в его конечном положении, которое он занимает, когда кресло находится в промежуточном положении. Таким образом, конечное положение - это положение резерва органа управления, когда кресло перемещается из промежуточного положения во второе рабочее положение. В других вариантах, когда первый орган управления отсоединяется от кресла, он может автоматически возвращаться в положение резерва, которое отличается от конечного положения.
На фиг.5, 6 и 7 более подробно показан один из вариантов конструкции кресла с органом управления по настоящему изобретению. В этой конструкции кресло 22 установлено на опорной плите 38, которая установлена на полу 40 кабины, например, с использованием системы 41 подвески и регулировки высоты, которая обеспечивает возможность изменения положения по вертикали опорной плиты и, соответственно, кресла относительно пола 40 кабины. Конечно, опорная плита кресла может быть прикреплена к полу кабины или же может составлять одно целое с этим полом. Кресло установлено на опорной плате с использованием оси 42 вращения, которая обеспечивает возможность поворота кресла 22 относительно опорной плиты вокруг вертикальной оси А1. Оба подлокотника 28, 30 присоединены к креслу, так что они поворачиваются вместе с креслом вокруг оси А1. Иными словами, подлокотники находятся в одном и том же положении относительно кресла при его перемещении из первого рабочего положения во второе рабочее положение. Правый орган 34 управления может быть, например, объединен с соответствующим правым подлокотником 30, так что он будет зафиксирован относительно кресла, за исключением возможности регулировки положения подлокотника 30 и/или органа 34 управления относительно кресла для подгонки под определенного оператора.
Как можно видеть на фигурах, левый орган 32 управления установлен на специальном кронштейне 44 отдельно от соответствующего подлокотника 28. Кронштейн 44 соединен с узлом кресла таким образом, что он может независимо поворачиваться вокруг оси А1 относительно кресла 22 и опорной плиты 38 кресла. В рассматриваемом варианте кронштейн 44 может содержать горизонтальную часть, которая соединена с центральной осью 42 вращения кресла с возможностью поворота вокруг нее и отходит от этой оси радиально в горизонтальной плоскости над опорной плитой 38, но под сиденьем 24 кресла 22. От дистального конца горизонтальной части отходит вверх вертикальная часть, на которой установлен орган 32 управления. Размеры и форму кронштейна 44 выбирают таким образом, что когда кронштейн и кресло находятся в заданном угловом положении относительно друг друга, орган 32 управления находится в удобном положении для оператора, сидящего в кресле. В том случае, когда кресло имеет подлокотники, как в рассматриваемом варианте, орган управления предпочтительно расположен непосредственно перед подлокотником. Поэтому в таком варианте орган управления может поворачиваться вокруг оси А1 относительно опорной плиты 38 кресла и, соответственно, относительно кабины 10, а также относительно самого кресла 22.
В рассматриваемом варианте на опорной плите 38 кресла обеспечивается упор-ограничитель 46 для ограничения поворота кронштейна 44 в одном направлении путем зацепления с его горизонтальной частью. Упор-ограничитель 46 представляет собой элемент, который определяет промежуточное положение кресла 22, в котором прекращается перемещение органа 32 управления вместе с креслом в направлении второго рабочего положения. Дополнительно может также обеспечиваться противолежащий упор-ограничитель 48, который аналогичным образом ограничивает поворот кронштейна 44 в противоположном направлении. Противолежащий упор-ограничитель 48 может соответствовать первому рабочему положению кресла. В рассматриваемом варианте упоры-ограничители 46, 48 зафиксированы относительно опорной плиты, однако по меньшей мере один из этих упоров-ограничителей может быть регулируемым для обеспечения возможности регулировки соответствующего конечного положения органа управления.
Таким образом, если кресло может перемещаться в противоположном направлении от первого рабочего положения, то есть в направлении, противоположном направлению, указанному на фиг.4Д, то может обеспечиваться удерживание органа управления в его первой конфигурации. В этом варианте орган управления будет перемещаться вместе с креслом вплоть до его противолежащего положения. Затем, как и в рассматриваемом варианте, кресло может поворачиваться в противоположном направлении из первого рабочего положения, и первый орган управления может перемещаться в этом направлении вместе с креслом, по меньшей мере до противолежащего конечного положения первого органа управления. В рассматриваемом примере два упора-ограничителя 46, 48 определяют диапазон положений первого органа 32 управления, который находится по обеим сторонам от первого рабочего положения кресла и для которого первый орган 32 управления удерживается в его первой конфигурации, оставаясь доступным для работы оператора.
На нижней поверхности сиденья 24 кресла обеспечивается контактный элемент 50, упирающийся в горизонтальную часть кронштейна 44 для предотвращения перемещения кронштейна 44 относительно кресла в одном направлении. В рассматриваемом варианте контактный элемент 50 кресла всегда находится с той же стороны кронштейна 44, что и упор-ограничитель 46 опорной плиты 38 кресла. Кронштейн 44 смещается с вращением вокруг оси А1 в направлении, противоположном направлению на контактный элемент 50 кресла, с помощью смещающего элемента, который может иметь форму пружины, например пружины сжатия, пружины растяжения или торсионной пружины, однако в рассматриваемом варианте смещающий элемент реализован в форме пневматического цилиндра. В рассматриваемом варианте смещающий элемент представляет собой пневматический цилиндр, который соединяется на одном конце с опорной плитой 38 кресла и на другом конце с кронштейном 44, прижимая кронштейн 44 к контактному элементу 50 кресла. Таким образом, пока кронштейн 44 не соприкасается ни с одним из упоров-ограничителей 46, 48, смещающий элемент заставляет кронштейн перемещаться вместе с креслом вокруг оси А1. Если же кресло 22 проходит промежуточное положение, показанное на фигуре 4В, в направлении второго рабочего положения, как показано на фиг.4А и 4Б, то кронштейн останавливается упором-ограничителем 46 в его конечном положении и его дальнейшее перемещение вместе с креслом прекращается. Таким образом, упор-ограничитель 46 обеспечивает отсоединение органа 32 управления от кресла, прекращая действие смещающего элемента, прижимающего кронштейн к контактному элементу 50 кресла. В рассматриваемом варианте положение резерва органа 32 управления представляет собой вышеописанное конечное положение.
Когда кресло поворачивается обратно в направлении первого рабочего положения, контактный элемент 50 кресла снова входит в контакт с кронштейном 44, когда кресло достигает своего промежуточного положения (фиг.4В) и по мере того как кресло перемещается обратно в направлении первого рабочего положения, контактный элемент 50 будет толкать кронштейн в этом же направлении.
Однако в других вариантах положение резерва органа управления может отличаться от конечного положения. Например, контактный элемент 50 может быть снабжен магнитным средством для соединения кресла и кронштейна органа управления, причем отсоединение обеспечивается тем же упором-ограничителем 46. В такой конфигурации магнитное средство эквивалентно смещающему элементу в том, что они удерживают опорный кронштейн в контакте с контактным элементом 50 и, соответственно, обеспечивают перемещение опорного кронштейна вместе с креслом до упора-ограничителя. В рассматриваемом варианте может быть предусмотрено упругое возвращающее устройство между опорной плитой кресла и кронштейном для возвращения кронштейна к противолежащему упору-ограничителю 48, когда магнитное средство отсоединяется при задержке кронштейна упором-ограничителем 46.
В рассматриваемом варианте кресло имеет подвеску, и первый орган управления следует за вертикальными перемещениями кресла. Такой признак необходим по меньшей мере в первой конфигурации, то есть пока орган управления соединен с креслом, когда оператор может пользоваться этим органом управления.
В варианте, показанном на фиг.2-7, первый орган 32 управления поворачивается вокруг той же оси А1, что и кресло. Желательно, чтобы между креслом и органом управления практически отсутствовало какое-либо относительное перемещение в рабочем диапазоне, в котором орган управления перемещается вместе с креслом. Безусловно некоторое относительное перемещение может считаться допустимым, поскольку это дает больше свободы в выборе и конструировании средств, направляющих движение кресла и/или органа управления.
В рассматриваемом варианте в первой конфигурации, в которой орган управления перемещается вместе с креслом, второй орган управления расположен симметрично с первым органом управления относительно кресла. Однако это необязательно, особенно в том случае, когда используются органы управления разных типов.
Настоящее изобретение обеспечивает оператору возможность использовать первый орган управления во всем рабочем диапазоне, когда он находится в оптимальном положении, и затем обеспечивает отведение первого органа управления, когда кресло ориентировано назад во втором рабочем положении, когда первый орган управления не используется. Дополнительно, первый орган управления включается, когда он находится в первой конфигурации, и выключается, когда он находится во второй конфигурации, что означает, что он не может больше использоваться для управления рабочим оборудованием. Это предотвращает нежелательное движение рабочего оборудования, когда оператор случайно заденет орган управления, находящийся во второй конфигурации, и управление включением/выключением первого органа управления в варианте, иллюстрируемом на фиг.2-7, может осуществляться с помощью датчика, обеспечивающего определение положения первого органа управления относительно кресла, например, путем определения положения кронштейна 44, удерживающего орган управления, относительно положения кресла. Датчик может, например, определять, что кронштейн органа управления находится в контакте с контактным элементом 50. После обнаружения такого контакта орган управления может быть включен, и после исчезновения такого контакта между кронштейном 44 и контактным элементом 50 орган управления может быть выключен.
Рабочий диапазон, в котором первый орган управления соединен с креслом и перемещается вместе с ним, имеет достаточную величину, чтобы оператор мог комфортно управлять соответствующим гидравлическим рабочим оборудованием в любых условиях работы. Предпочтительно рабочий диапазон превышает 15 градусов и более предпочтительно составляет не менее 45 градусов. Первое рабочее положение кресла необязательно находится посередине рабочего диапазона. С другой стороны, в предпочтительных вариантах положение резерва первого органа управления в достаточной степени удалено от второго рабочего положения, чтобы он не был помехой для работы оператора в этом положении. Например, в варианте, иллюстрируемом на фиг.2-7, положение резерва органа управления должно соответствовать по меньшей мере 30 градусам, предпочтительно более 60 градусам, поворота кресла относительно второго рабочего положения. В рассмотренном варианте положение резерва составляет примерно 120 градусов поворота кресла из второго рабочего положения (см. положение кресла на фиг.4В).
На фиг.8, 9 показан схематично второй вариант осуществления изобретения, который описывается ниже лишь в той степени, в которой он отличается от первого варианта, и описания всех других признаков (обязательных или необязательных) первого варианта могут быть перенесены на этот второй вариант. В этом варианте кронштейн 44 органа управления установлен на кресле 22 с возможностью поворота вокруг горизонтальной оси А2, между первым положением, в котором оператор может использовать орган управления для выполнения работы (рабочее положение органа управления), как показано на фиг.8, и вторым положением, в котором оператор не может использовать орган управления (нерабочее положение органа управления), как показано на фиг.9. При повороте кронштейна 44 орган управления перемещается вниз относительно кресла, с одной его стороны. Кронштейн органа управления может перемещаться с помощью привода, управление которым осуществляется в автоматическом режиме в соответствии с перемещениями кресла. Перемещение кресла может отслеживаться, например, с помощью соответствующих датчиков, или же в случае перемещения кресла между первым и вторым рабочими положениями с помощью привода управление приводами кресла и органа управления может осуществляться таким образом, чтобы кресло и орган управления перемещались соответствующим образом. В этом варианте первый орган 32 управления соединен с креслом, так что он будет перемещаться вместе с креслом, когда оно перемещается между первым рабочим положением и промежуточным положением, то есть орган управления удерживается в рабочем положении относительно кресла, когда оно перемещается между первым положением и промежуточным положением, и во второй конфигурации первый орган 32 управления может быть перемещен в нерабочее положение, когда кресло находится во втором положении.
Модификации второго варианта могут включать другой механизм перемещения кронштейна относительно кресла, который может обеспечивать другое перемещение.
Для целей настоящего изобретения могут использоваться органы управления любого типа. Предпочтительно используются гидравлические или электрические контроллеры. Более конкретно, они представляют собой регуляторы пропорционального действия, в которых сигнал управления (электрический, гидравлический, магнитный, механический и т.п.) пропорционален смещению контроллера оператором. Они используются для управления гидравлическими или электрическими приводами рабочего оборудования.
Реферат
Группа изобретений относится к строительным машинам. Строительная машина содержит рабочее место оператора с креслом (22) водителя, опору, на которой установлено кресло (22) с возможностью поворота вокруг вертикальной оси (A1), кронштейн органа управления, установленный с возможностью поворота вокруг указанной оси (A1) относительно и кресла, и опоры кресла, контактный элемент на кресле для зацепления с кронштейном органа управления, смещающий элемент для смещения опорного кронштейна в направлении контактного элемента, упор-ограничитель опоры кресла для ограничения перемещения опорного кронштейна и датчик положения кресла для определения промежуточного положения кресла. Кресло может поворачиваться вокруг вертикальной оси (A1) из первого рабочего положения во второе рабочее положение с переходом через промежуточное положение. Когда кресло перемещается между первым положением и промежуточным положением, орган управления формирует первую конфигурацию с креслом, в которой первый орган управления перемещается вместе с креслом так, что он находится в рабочем положении по отношению к креслу. Когда кресло поворачивается из промежуточного положения во второе положение, орган управления автоматически смещается во вторую конфигурацию, в которой он передвинут в нерабочее положение по отношению к креслу. Достигается эргономичная компоновка кабины оператора строительной машины. 3 н. и 14 з.п. ф-лы, 9 ил.
Формула
опору (38), на которой установлено кресло (22) с возможностью поворота вокруг вертикальной оси (A1);
кронштейн (44) первого органа управления, установленный с возможностью поворота вокруг указанной оси (A1) относительно и кресла, и опоры кресла;
контактный элемент (50) на кресле для зацепления с кронштейном органа управления;
смещающий элемент (52) для смещения опорного кронштейна в направлении контактного элемента;
упор-ограничитель (46) опоры кресла для ограничения перемещения опорного кронштейна.
кресло (22), установленное с возможностью поворота вокруг вертикальной оси (A1) по меньшей мере из первого рабочего положения во второе рабочее положение с прохождением через промежуточное положение;
датчик положения кресла для определения по меньшей мере промежуточного положения кресла;
кронштейн (44) первого органа управления, установленный с возможностью перемещения перемещающим устройством относительно кресла из рабочего положения в нерабочее положение;
средство управления перемещающим устройством таким образом, что орган управления удерживается в рабочем положении, когда кресло перемещается между первым положением и по меньшей мере промежуточным положением, и перемещается в нерабочее положение, когда кресло перемещается за промежуточное положение.
Комментарии