Подъемный рычажный механизм фронтального погрузчика - RU2637684C2
Код документа: RU2637684C2
Чертежи
Описание
Область изобретения
Настоящее изобретение относится к строительной машине, такой как фронтальный погрузчик и компактный погрузчик и, в частности, к рычажному механизму для подъема навесного оборудования такой строительной машины.
Предпосылки к созданию изобретения
Рабочие машины, например, применяемые в сельском хозяйстве, строительстве и на лесозаготовках, выполняют разнообразные операции. В некоторых случаях такие машины оснащены навесным оборудованием или инструментом для выполнения требуемой функции. Навесное оборудование или инструмент, например, ковш, вильчатый захват или грейфер подвижно соединены с рамой машины механическим подъемным рычагом или стрелой. Подъемный рычаг или стрела функционально управляется оператором машины с использованием органов управления, расположенных в кабине машины.
В одном случае машина может иметь ковш, функционально соединенный с ее передним концом. Оператор машины может управлять ковшом для подбора материала на уровне земли и транспортировки этого материала в нужное место. Оператор может функционально управлять ковшом от уровня земли до максимальной высоты подъема так, чтобы образованная точка ковша двигалась по траектории подъема. Форма траектории подъема и максимальная высота подъема могут быть функциями подъемного рычага или стрелы и рычажного механизма, который соединяет подъемный рычаг или стрелу с рамой. Во многих случаях отношение рычажного механизма и подъемного рычага или стрелы определяет траекторию подъема и максимальную высоту подъема, достигаемую машиной.
Максимальная высота, на которую известные машины могут перемещать навесное оборудование или инструмент, может быть ограничена силой, генерируемой гидравлическими приводами. Кроме того, многие известные машины могут быть сконструированы для достижения большей максимальной высоты, но при ограниченном усилии отрыва на уровне земли (т.е. силе, которая необходима для отрыва или разрыхления части материала от уплотненной кучи). Другие известные машины могут иметь увеличенный потенциал усилия отрыва, но уменьшенную длину траектории подъема.
Таким образом, существует потребность в создании машины и, в частности, механизма сочленения и стрелы для машины, которые могут создавать максимальное усилие отрыва на уровне земли и, кроме того, иметь большую высоту подъема.
Краткое описание изобретения
В иллюстративном варианте настоящего изобретения рабочая машина содержит раму и механизм взаимодействия с землей. Механизм взаимодействия с землей выполнен с возможностью поддерживать раму. Рабочий инструмент соединен с рамой и функционально управляется для выполнения требуемой функции. Машина также содержит стойку стрелы, шарнирно соединенную с рабочим инструментом, при этом стойка стрелы выполнена с возможностью перемещать рабочий инструмент из первого положения во второе положение по траектории подъема. Верхний рычаг одним концом шарнирно соединен с рамой, а противоположным концом соединен со стойкой стрелы, при этом верхний рычаг шарнирно соединен со стойкой стрелы в первом местоположении. Нижний рычаг одним концом шарнирно соединен с рамой, а противоположным концом соединен со стойкой стрелы, при этом нижний рычаг шарнирно соединен со стойкой стрелы во втором местоположении. Машина далее содержит гидравлический привод, шарнирно соединенный одним концом с рамой, а противоположным концом со стойкой стрелы, при этом гидравлический привод шарнирно соединен со стойкой стрелы в третьем местоположении. Первое местоположение и второе местоположение разнесены друг от друга на первое расстояние, второе местоположение и третье местоположение разнесены друг от друга на второе расстояние, и первое местоположение и третье местоположение разнесены друг от друга на третье расстояние. Здесь первое расстояние и второе расстояние по меньшей мере вдвое превышают третье расстояние.
Согласно первому аспекту настоящего изобретения первое расстояние и второе расстояние по меньшей мере втрое больше третьего расстояния. Согласно второму аспекту настоящего изобретения стойка стрелы содержит внутреннюю поверхность, которая определяет продольную ось так, что верхний рычаг, нижний рычаг и гидравлический привод смещены относительно продольной оси к центральной линии машины. В одной форме этого аспекта верхний рычаг смещен от продольной оси на первое расстояние смещения, а гидравлический привод смещен от продольной оси на второе расстояние смещения, при этом первое расстояние смещения больше, чем второе расстояние смещения. В другой форме этого аспекта нижний рычаг смещен от продольной оси на третье расстояние смещения, при этом третье расстояние смещения меньше, чем первое расстояние смещения.
Согласно другому аспекту верхний рычаг содержит поперечный изгиб, образованный в ней между одним его концом и противоположным его концом. Кроме того, верхний рычаг может содержать заднюю соединительную точку, образованную между одним его концом и противоположным концом так, чтобы поперечный изгиб был определен между первым местоположением и задней соединительной точкой. Согласно другому аспекту рабочая машина может содержать второй гидравлический привод, шарнирно соединенный одним концом со стойкой стрелы, а вторым концом - с рабочим инструментом, при этом первый и второй гидравлические приводы содержат шток, который проходит между втянутым положением и выдвинутым положением. Здесь движение каждого штока между втянутым положением и выдвинутым положением и соответствующее поворотное движение верхней тяги, нижней тяги и первого гидравлического привода относительно стойки стрелы вызывает движение рабочего инструмента по траектории подъема между первым положением и вторым положением. В связи с этим движение рабочего инструмента по траектории подъема определяет кривую подъема относительно соединения, на основе шарнирного пальца, которое соединяет рабочий инструмент и стойку стрелы друг с другом так, что кривая подъема имеет по меньшей мере первый участок, соответствующий первому положению, второй участок, соответствующий второму положению, и третий участок, соответствующий положению, образованному между первым положением и вторым положением. Кривая подъема может иметь первый образованный наклон на первом участке, второй образованный наклон на втором участке и третий образованный наклон на третьем участке так, чтобы первый наклон и второй наклон были больше, чем третий наклон.
В другом варианте настоящего изобретения предлагается подъемный рычажный механизм для рабочей машины, имеющей рабочий инструмент. Подъемный рычажный механизм содержит раму, стойку стрелы, верхний рычаг, нижний рычаг и гидравлический привод. Стойка стрелы выполнена с возможностью шарнирного соединения с рабочим инструментом и имеет поверхность, которая определяет продольную ось. Первый конец верхнего рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Первый конец нижнего рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Гидравлический привод имеет шток, шарнирно соединенный со стойкой стрелы и проходит между втянутым положением и выдвинутым положением. Гидравлический привод далее соединен с рамой. Верхний рычаг, нижний рычаг и гидравлический привод разнесены от продольной оси.
Согласно одному аспекту верхний рычаг смещен от продольной оси на первое расстояние смещения, а гидравлический привод смещен от продольной оси на второе расстояние смещения, при этом первое расстояние смещения больше, чем второе расстояние смещения. Согласно другому аспекту нижний рычаг смещен от продольной оси на третье расстояние смещения, при этом третье расстояние смещения меньше, чем первое расстояние смещения. Согласно другому аспекту верхний рычаг может содержать поперечный изгиб, образованный на нем между первым концом и вторым концом. В связи с этим верхний рычаг может содержать заднюю соединительную точку, образованную между первым концом и вторым концом так, чтобы поперечный изгиб был определен между вторым концом и задней соединительной точкой. Согласно еще одному аспекту верхний рычаг шарнирно соединен со стойкой стрелы в первом местоположении, нижний рычаг соединен со стойкой стрелы во втором местоположении, и шток шарнирно соединен со стойкой стрелы в третьем местоположении. Первое местоположение и второе местоположение могут быть разнесены друг от друга на первое расстояние, второе местоположение и третье местоположение могут быть разнесены друг от друга на второе расстояние, а первое местоположение и третье местоположение могут быть разнесены друг от друга на третье расстояние. Здесь и первое расстояние, и второе расстояние больше, чем третье расстояние.
В другом варианте предлагается рычажный механизм для рабочей машины. Механизм содержит раму, стрелу, гидравлический привод, первый рычаг и второй рычаг. Гидравлический привод имеет шток, проходящий между втянутым положением и выдвинутым положением, при этом гидравлический привод шарнирно соединен с рамой, а шток шарнирно соединен со стойкой стрелы. Первый конец первого рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Первый конец второго рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Второй рычаг также содержит поперечный изгиб, образованный на нем между первым концом и вторым концом.
Согласно одному аспекту рычажного механизма стойка стрелы определяет продольную ось, а первый рычаг, второй рычаг и гидравлический привод смещены от продольной оси. В связи с этим аспектом второй рычаг может быть смещен от продольной оси на первое расстояние смещения, а гидравлический привод может быть смещен от продольной оси на второе расстояние смещения, при этом первое расстояние смещения больше, чем второе расстояние смещения. Кроме того, первый рычаг смещен от продольной оси на третье расстояние смещения и третье расстояние смещения меньше, чем первое расстояние смещения. Согласно другому аспекту первый рычаг шарнирно соединен со стойкой стрелы в первом местоположении, второй рычаг шарнирно соединен со стойкой стрелы во втором местоположении, и шток шарнирно соединен со стойкой стрелы в третьем местоположении. Здесь первое местоположение и второе местоположение разнесены друг от друга на первое расстояние, первое местоположение и третье местоположение разнесены друг от друга на второе расстояние, и второе местоположение и третье местоположение разнесены друг от друга на третье расстояние, при этом первое расстояние и второе расстояние больше, чем третье расстояние.
Краткое описание чертежей
Вышеописанные аспекты настоящего изобретения и способы их реализации, а также само изобретение будут более понятны из нижеследующего описания вариантов изобретения со ссылками на чертежи, где:
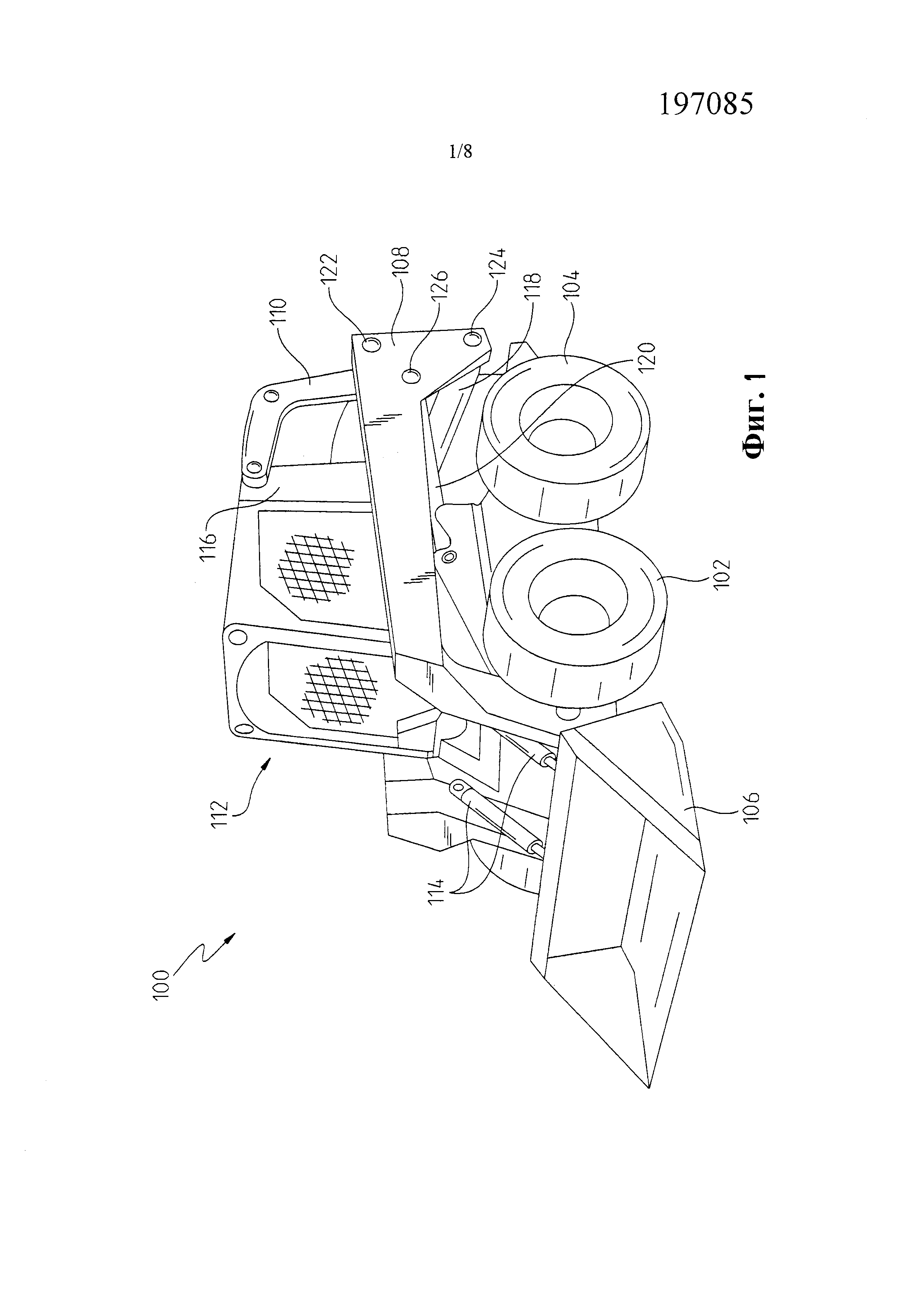
Фиг. 1 - вид сбоку в перспективе фронтального погрузчика.
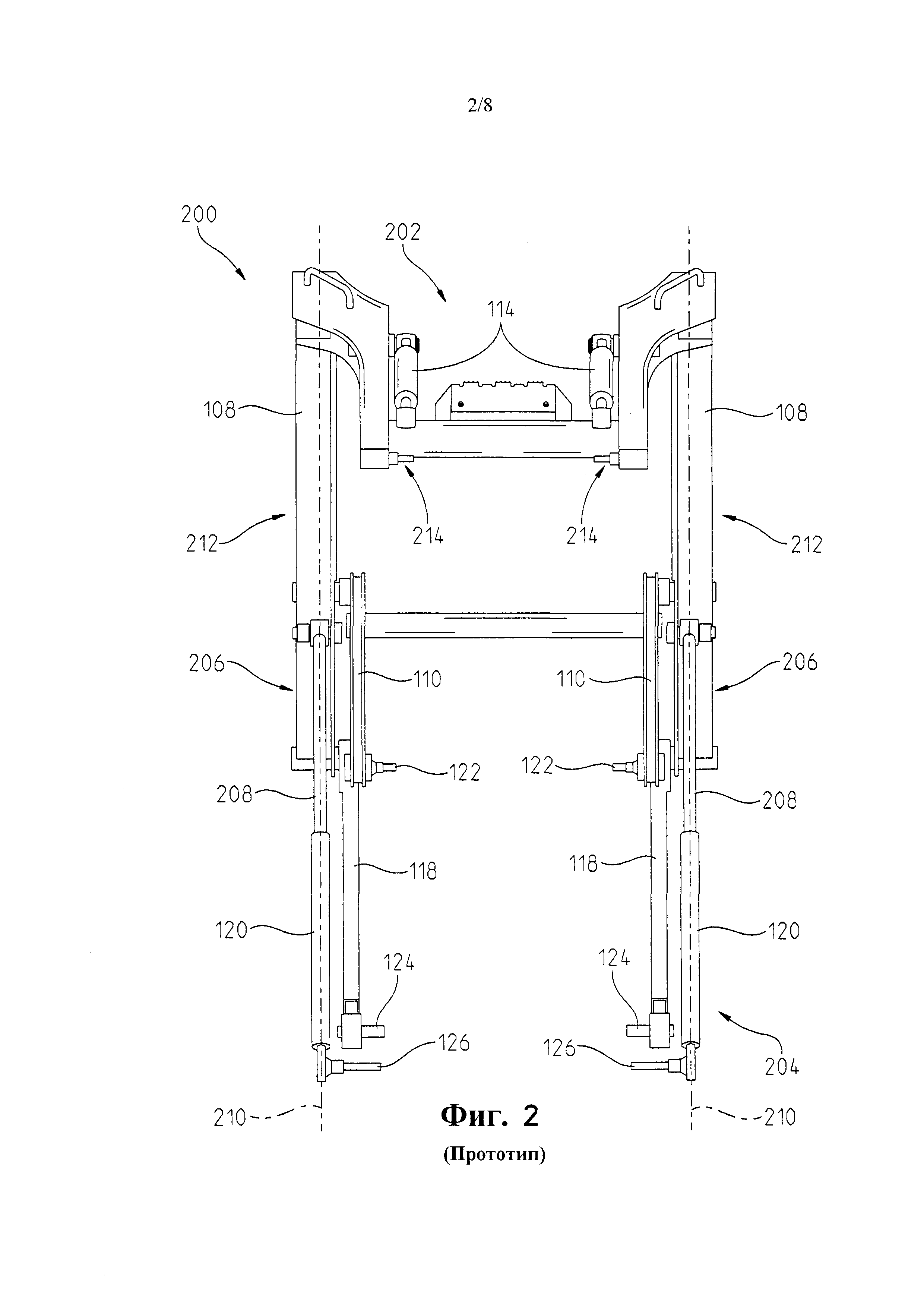
Фиг. 2 - схематический вид сбоку известной стойки стрелы и рычажного механизма для рабочей машины.
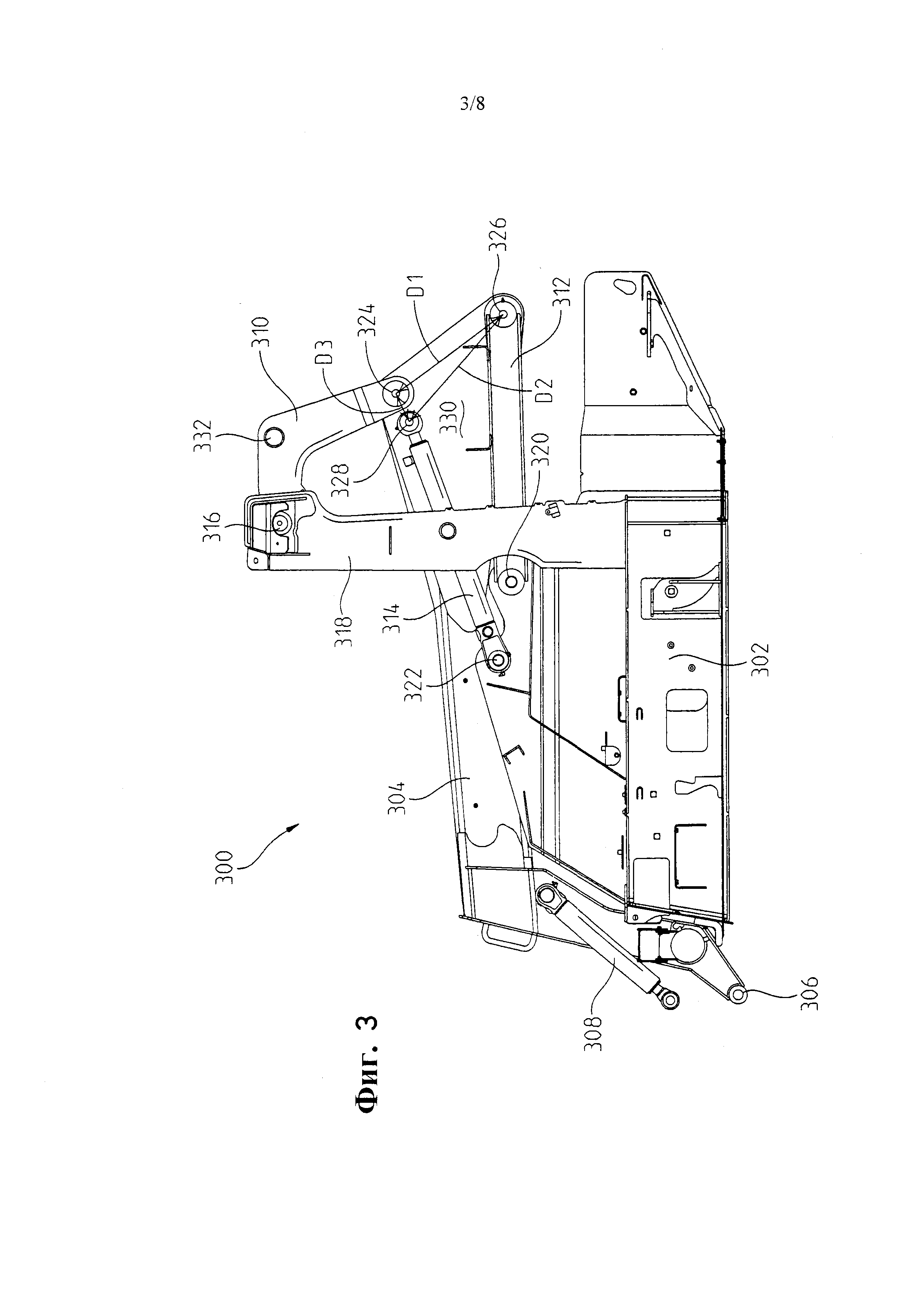
Фиг. 3 - схематический вид сбоку иллюстративного варианта стойки стрелы и рычажного механизма.
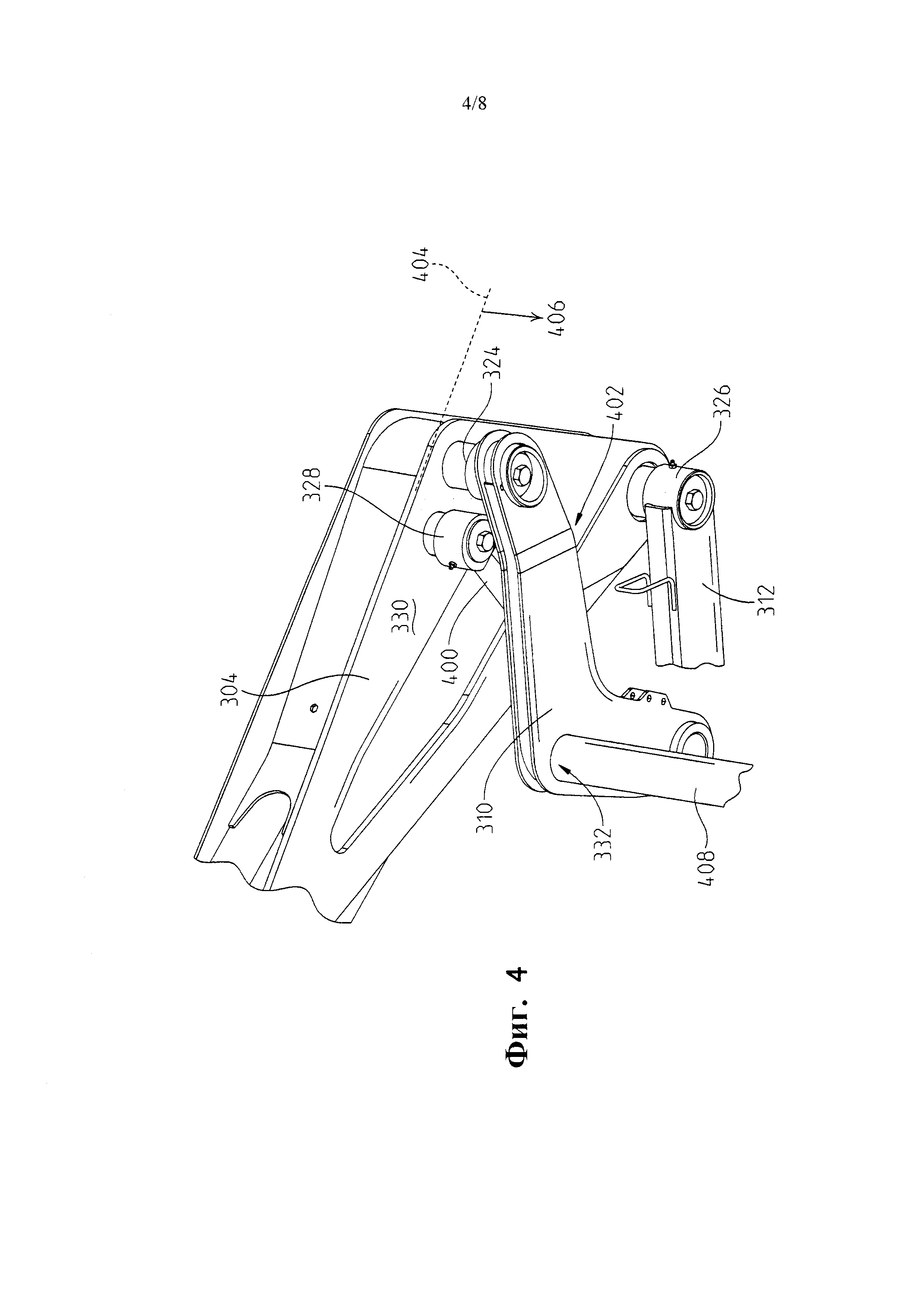
Фиг. 4 - частичный вид в перспективе стойки стрелы и рычажного механизма по п. 3.
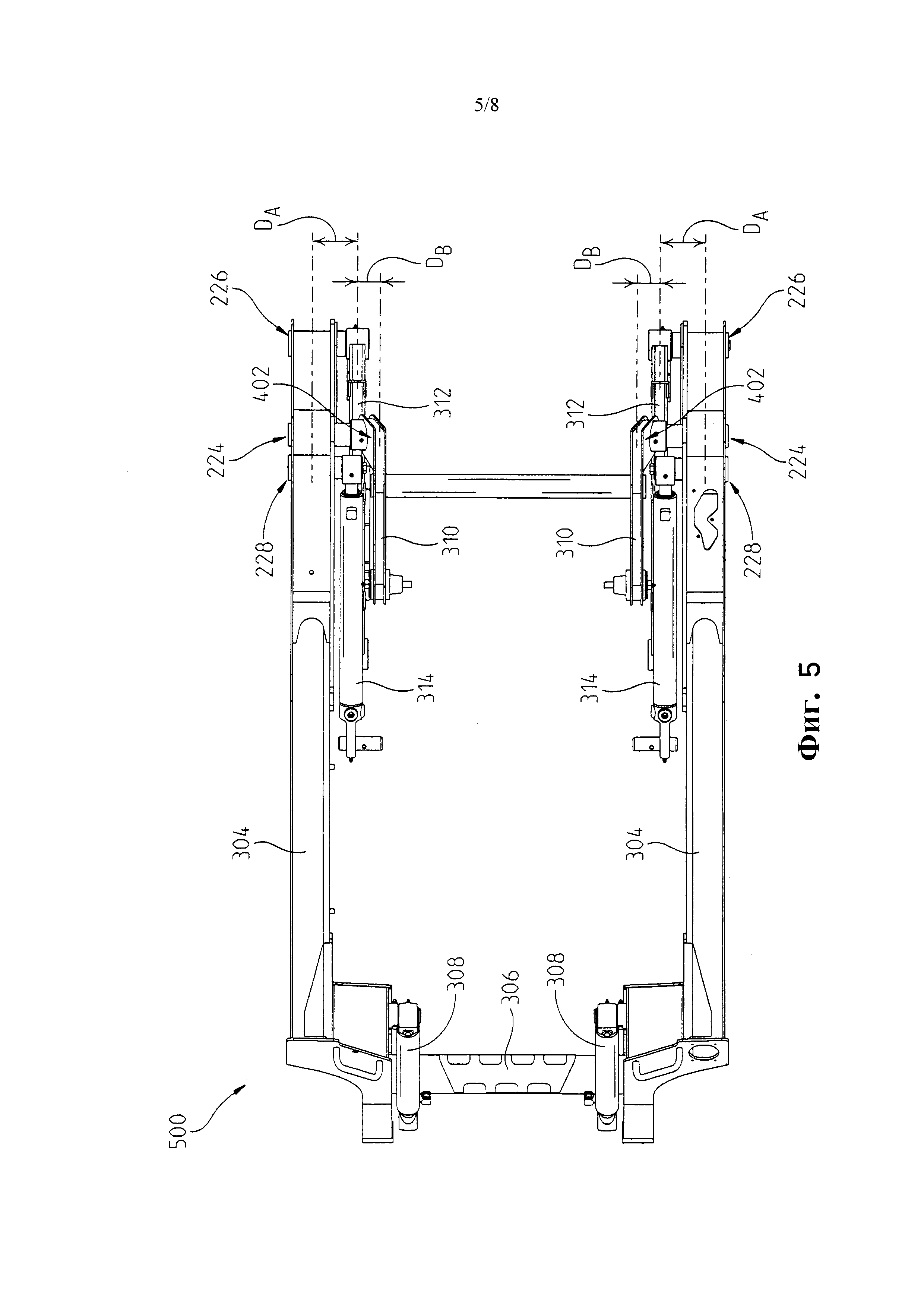
Фиг. 5 - вертикальная проекция стойки стрелы и рычажного механизма по фиг. 3.
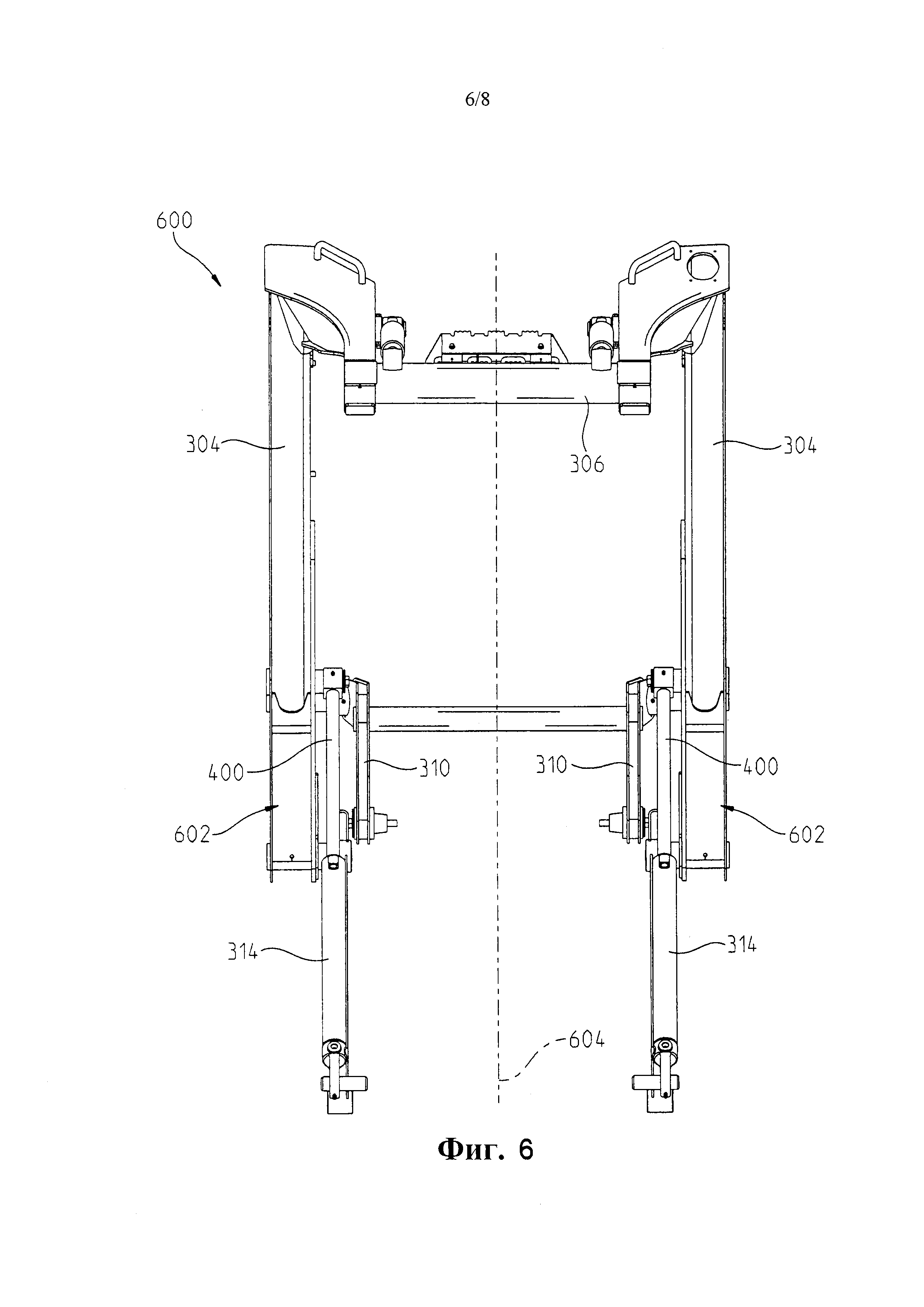
Фиг. 6 - горизонтальная проекция гидравлического привода стойки стрелы и рычажного механизма в выдвинутом положении.
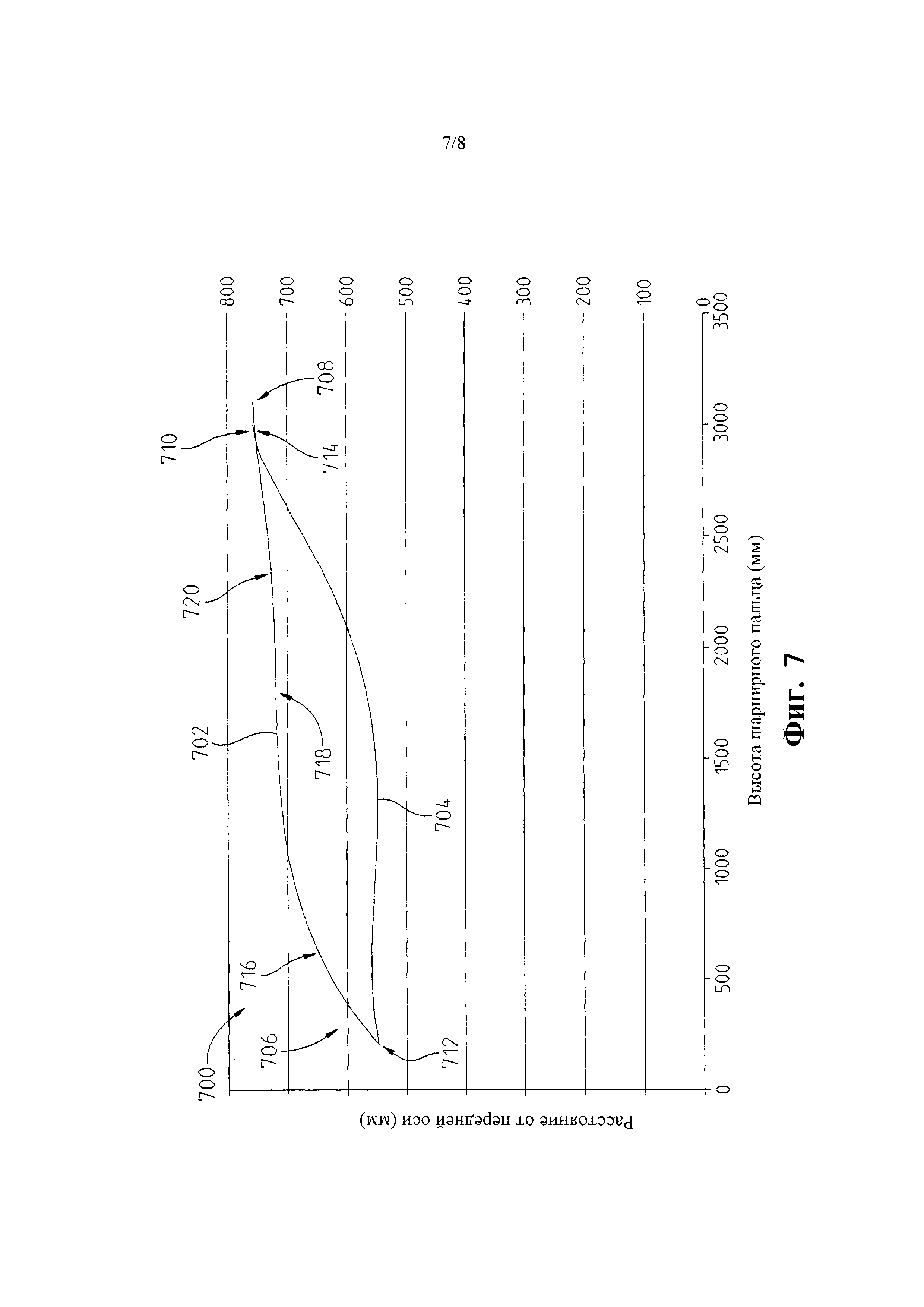
Фиг. 7 - графическое представление траектории подъема шарнирного пальца для рабочей машины, и
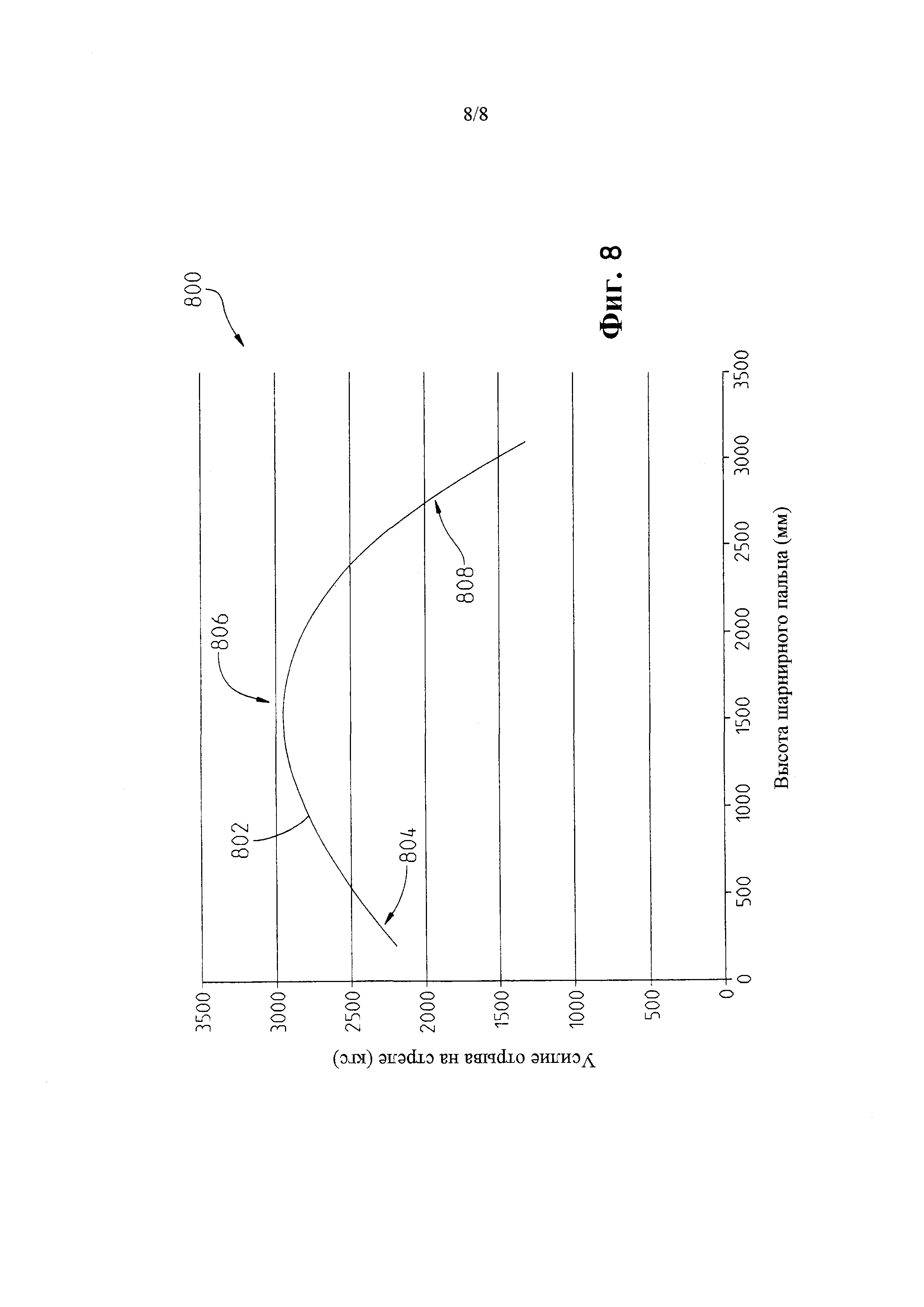
Фиг. 8 - графическое представление усилия отрыва стрелы относительно высоты подъема рабочей машины.
На всех чертежах одинаковые детали обозначены одними и теми же ссылочными позициями.
Подробное описание
Ниже следует описание вариантов настоящего изобретения, которые не являются исчерпывающими и не ограничивают изобретение конкретными формами. Эти варианты выбраны и описаны для того, чтобы специалисты могли оценить и понять принципы и способы реализации настоящего изобретения.
На фиг. 1 показан иллюстративный вариант машины, такой как фронтальный погрузчик 100. Настоящее изобретение не ограничивается фронтальным погрузчиком, но может относиться к любой сельскохозяйственной, строительной или лесозаготовительной машине. Фронтальный погрузчик 100 может иметь механизм взаимодействия с землей для движения по земле. На фиг. 1 механизм взаимодействия с землей содержит пару передних колес 102 и пару задних колес 104. Согласно другому аспекту, например, в компактном погрузчике, механизмом взаимодействия с землей могут быть гусеницы, расположенные на каждой боковой стороне машины. В известном фронтальном погрузчике оператор может манипулировать органами управления, находясь в кабине 112 для приведения в действие колес на правой или на левой стороне машины 100 с разной скоростью для поворота машины 100 известным способом.
Машина 100 далее может быть снабжена навесным оборудованием или инструментом для выполнения требуемых операций. На фиг. 1 фронтальный погрузчик 100 содержит ковш 106 погрузчика для сбора в него материала и транспортировки этого материала в требуемое положение. Ковш 106 погрузчика может быть шарнирно соединен с передней частью пары стоек 108 стрелы, расположенных с каждой стороны машины 100. Пара гидравлических приводов 114 наклона ковша может проходить между ковшом 106 и стойками 108 стрелы для управления наклоном ковша 106 относительно стоек 108 стрелы. Каждый гидравлический привод 114 может содержать шток цилиндра, который перемещается вперед и назад внутри цилиндра в ответ на изменение гидравлического давления. Приводя в действие гидравлические приводы 114 наклона, оператор может наклонять ковш 106 для сброса из него материала.
На фиг. 1 ковш 106 показан на минимальной высоте. Для подъема ковша 106 каждая из пары стоек 108 стрелы соединена с верхним рычагом 110 в первом местоположении 122 и с нижним рычагом 118 во втором местоположении 124. Верхний рычаг 110 и нижний рычаг 118 также прикреплены к основной раме 116 фронтального погрузчика 100 противоположными концами относительно концов, прикрепленных к стойке 108 стрелы. Гидравлический привод 120 шарнирно прикреплен одним концом к основной раме 116, а противоположным концом - к стойке 108 стрелы. Гидравлический привод 120 соединен со стойкой стрелы в третьем местоположении 126. Первое местоположение 122, второе местоположение 124 и третье местоположение 126 разнесены друг от друга приблизительно на одинаковое расстояние.
На фиг. 2 показана известная конструкция подъемного рычажного механизма 200. Механизм 200 содержит передний конец 202 и задний конец 204, при этом навесное оборудование или инструмент может крепиться к переднему концу 202 машины. В частности, навесное оборудование или инструмент может приводиться парой гидравлических приводов 114. Навесное оборудование или инструмент (не показан) может крепиться к шасси машины в положении 214 шарнирного пальца. Положение 214 шарнирного пальца является положением, в котором навесное оборудование или инструмент шарнирно соединяется со стойкой 108 стрелы машины. На фиг. 2 рычажный механизм 200 содержит пару стоек 108 стрелы, по одной с каждой стороны машины.
С каждой стороны машины стойка 108 стрелы шарнирно соединена с верхним рычагом 110, нижним рычагом 118 и гидравлическим приводом 120. В известной конструкции по фиг. 2 продольная ось обозначена позицией 210. Ось 210 проходит сквозь каждый гидравлический привод 120 и его соответствующий шток 208. Как показано на чертеже, ось 210 также проходит сквозь каждую стойку 108 стрелы, тем самым показывая, что гидравлический привод 120 и шток 208 расположены на одной линии со стойкой 108 стрелы. Кроме того, в этой конструкции гидравлический привод 120 смещен относительно верхнего рычага 110 и нижнего рычага 118.
Для размещения гидравлического привода 120 и штока 208, в частности, поскольку гидравлический привод 120 проходит между выдвинутым положением и втянутым положением, каждая из пары стоек 108 стрелы содержит первый участок 212 и второй участок 206. Первый участок 212 имеет первую толщину, а второй участок 206 имеет вторую толщину, где вторая толщина меньше, чем первая толщина. Другими словами, стойка 108 стрелы содержит углубленный участок, который определен вторым участком 206. Углубленный участок 206 создает зазор для привода 120, перемещающегося в разные положения. Гидравлический привод 120 соединен со стойкой 108 стрелы в третьей соединительной точке 126, которая определена в углубленном участке стойки 108 стрелы.
Известный рычажный механизм по фиг. 2 имеет ограниченное усилие отрыва стрелы, или силу, генерируемую на режущей кромке ковша. Как определено выше, усилие отрыва стрелы - это сила, создаваемая на уровне земли ковшом или рабочим инструментом для отрыва или разрыхления материала от уплотненной кучи материала. Например, если фронтальный погрузчик собирает грязь из уплотненной кучи грязи, усилие отрыва является силой, которую ковш прилагает к куче для отрыва от нее грязи или для ее разрыхления. Во многих известных фронтальных погрузчиках имеется компромисс между созданием большого усилия отрыва и способностью подъема груза на большую высоту. Другими словами, известный фронтальный погрузчик с большим усилием отрыва имеет небольшую высоту подъема и наоборот.
На фиг. 3-6 показан иллюстративный вариант подъемного рычажного механизма 300 по настоящему изобретению. Подъемный рычажный механизм 300 может содержать стойку 304 стрелы, верхний рычаг 310, нижний рычаг 312 и гидравлический привод 314. Гидравлический привод 314 может содержать шток цилиндра, который проходит вперед и назад в цилиндре в ответ на изменение гидравлического давления. Стойка 304 стрелы может быть соединена с навесным оборудованием или инструментом в положении 306 поворотного шарнира. Один или более гидравлический привод также может быть одним концом 308 соединен с рамой или шасси 302, а противоположным концом - с навесным оборудованием или инструментом. Этот один или более гидравлический привод могут передавать гидравлическую мощность для перемещения навесного оборудования или инструмента. В частности, один или более гидравлический привод 308 поворачивается относительно стойки 304 стрелы так, что подъемный механизм 300 и гидравлические приводы 308 могут поднимать навесное оборудование или инструмент от уровня земли до максимальной высоты по траектории подъема. Это более подробно будет описано ниже со ссылками на фиг. 7.
Верхний рычаг 310 может быть шарнирно соединен со стойкой 304 стрелы в первой точке 324 соединения, а нижний рычаг 312 может быть шарнирно соединен со стойкой 304 стрелы во второй точке 326 соединения. Аналогично, гидравлический привод 314 может быть шарнирно соединен со стойкой 304 стрелы в третьей точке 328 соединения. Как показано на фиг. 3, и первая точка 324 соединения, и вторая точка 326 соединения, и третья точка 328 соединения расположены внутри внутренней поверхности 330 стойки 304 стрелы. Другими словами, на фиг. 3 внутренняя поверхность 300 обращена к внутренней части машины и верхний рычаг 310, нижний рычаг 312 и гидравлический привод 314 шарнирно соединены со стойкой 304 стрелы в местоположениях, расположенных внутри или смещенных от внутренней поверхности 330 стойки 3-4 стрелы. Это дополнительно показано на фиг. 4 и 5 и описано ниже.
Кроме того, местоположения первой соединительной точки 324, второй соединительной точки 326 и третьей соединительной точки 328 относительно друг друга отличаются от известного рычажного механизма 200 с фиг. 2, т.е. первая соединительная точка 324 расположена ближе к третьей соединительной точке 328. Более конкретно, первая соединительная точка 324 и вторая соединительная точка разнесены друг от друга на первое расстояние D1, а вторая соединительная точка 326 и третья соединительная точка разнесены друг от друга на второе расстояние D2. Аналогично, первая соединительная точка 324 и третья соединительная точка 328 разнесены друг от друга на третье расстояние D3. Согласно одному аспекту первое расстояние и второе расстояние могут быть приблизительно одинаковы. Согласно другому аспекту первое расстояние и второе расстояние могут отличаться друг от друга, но оба этих расстояния больше, чем третье расстояние. Другими словами, эти три расстояния не одинаковы и, следовательно, точки соединения расположены не на приблизительно одинаковом расстоянии друг от друга. Согласно еще одному аспекту первое и второе расстояния втрое больше третьего расстояния.
Как показано на фиг. 3, верхний рычаг 310 также соединен с рамой или шасси 302 машины. Здесь первый конец верхнего рычага 310 соединен с рамой или шасси 302 в первом местоположении 316 шарнира, а второй конец соединен в первой соединительной точке 324. Первое местоположение 316 шарнира находится на заднем участке башни 318 рамы или шасси 302. Верхний рычаг 310 может иметь по существу L-образную структуру, где положение 316 шарнира находится на первом конце, первая точка 324 соединения на втором конце, а задняя соединительная точка 332 расположена между ними. На фиг. 4, например, задняя соединительная точка 332 может использоваться для соединения верхнего рычага 310 с элементом 408 рамы, который проходит между верхним рычагом 310 на левой стороне машины и верхним рычагом 310 на правой стороне машины. Это позволяет машине функционально поднимать и опускать навесное оборудование или инструмент управляемым способом, используя рычажный механизм 300 на обеих сторонах машины.
Нижний рычаг 312 также может быть шарнирно соединен с рамой или шасси 302 машины во втором местоположении 320 шарнира. Аналогично, гидравлический привод 314 может быть шарнирно соединен с рамой или шасси 302 в третьем местоположении 322 шарнира. Следовательно, верхний рычаг 310, нижний рычаг 312 и гидравлический привод 314 шарнирно соединены с рамой или шасси 302 машины и со стойкой 304 стрелы. Как было описано выше, машина может содержать подъемный рычажный механизм 300 на обеих ее сторонах так, что машина содержит по меньшей мере две стойки 304 стрелы, два верхних рычага 310, два нижних рычага 312 и два гидравлических привода 314.
Как показано на фиг. 4 и 5, внутренняя поверхность 330 стойки 304 стрелы определена как плоская поверхность вдоль линии 404. Как показано на чертежах, верхний рычаг 310, нижний рычаг 312 и гидравлический привод 314 смещены от линии 404 в направлении, показанном стрелкой 406. Кроме того, шток 400 гидравлического привода 314 соединен со стойкой 304 стрелы в третьей соединительной точке 328. На фиг. 5 шток 400 и гидравлический привод 314 могут быть смещены от стойки 304 стрелы на расстояние DA. Аналогично, нижний рычаг 312 соединен со стойкой 304 стрелы во второй соединительной точке 326 и может быть смещен от стойки 304 стрелы приблизительно на такое же расстояние DA. Другими словами, гидравлический привод 314 и нижний рычаг 312 могут быть смещены в сторону центральной линии машины (т.е. внутрь машины) приблизительно на одинаковое расстояние DA. Однако поскольку первая соединительная точка 324 и третья соединительная точка 328 расположены в непосредственной близости друг к другу, верхний рычаг 310 можно сместить от стойки 304 стрелы на расстояние DB. Здесь расстояние DA больше, чем расстояние DB так, что поворот либо верхнего рычага 310, либо гидравлического привода 314 не приводит к столкновению двух рычагов. Кроме того, когда стойки 304 стрелы перемещают навесное оборудование или инструмент между положением у земли и положением максимальной высоты подъема, дополнительное смещение верхних рычагов 310 от стоек 304 стрелы позволяет всем элементам рычажного механизма 300 двигаться и поворачиваться относительно друг друга без контакта или столкновений между любыми двумя рычагами.
Как далее показано на фиг. 4 и 5, верхний рычаг 310, нижний рычаг 313 и гидравлический привод 314 могут быть расположены по существу параллельно плоскости, образованной линией 404, и следовательно верхний рычаг 310, нижний рычаг 312 и гидравлический привод можно расположить по меньшей мере по существу параллельно внутренней поверхности 330 стойки 304 стрелы. Кроме того, согласно одному аспекту нижний рычаг 312 и гидравлический привод 314 могут быть определены в первой плоскости, а верхний рычаг 310 может быть определен во второй плоскости, смещенной относительно первой плоскости. Альтернативно, верхний рычаг 310 может быть определен в первой плоскости, нижний рычаг 312 может быть определен во второй плоскости, а гидравлический привод 314 может быть определен в третьей плоскости, где первая плоскость, вторая плоскость и третья плоскость по существу параллельны, но смещены друг от друга.
На фиг. 4 и 5 помимо того, что верхний рычаг 310 смещен от стойки 304 стрелы на большее расстояние, чем гидравлический привод 314 и нижний рычаг 312, верхний рычаг 310 может также содержать поперечный изгиб 402, который определен в нем. Поперечный изгиб 402 может быть определен между первой соединительной точкой 324 и задней соединительной точкой 332. Другими словами, поперечный изгиб 402 определен на верхнем рычаге 310 в положении, ближайшем к первой соединительной точке 324, а не к первому положению 316 шарнира. В иллюстративном рычажном механизме 300 верхний рычаг 310 соединен со стойкой 304 стрелы в местоположении вблизи или более близком к местоположению, в котором гидравлический привод 400 соединен со стойкой 304 стрелы (т.е. достигается относительная близость первой соединительной точки 324 к третьей соединительной точке 328). Благодаря близости этих соединительных точек друг к другу поперечный изгиб 402 позволяет гидравлическому приводу 314 выдвигаться и втягиваться, не контактируя с верхним рычагом 310. В большинстве известных рычажных механизмов верхний рычаг и гидравлический привод разнесены друг от друга на такое расстояние, чтобы не возникала опасность потенциальных столкновений рычагов, когда движется стойка стрелы. Однако для достижения требуемых кривой подъема и высоты подъема иллюстративного подъемного рычажного механизма 300 первая соединительная точка 324 и третья соединительная точка 238 могут быть расположены в непосредственной близости друг к другу, благодаря тому, что в верхнем рычаге 310 определен поперечный изгиб 402.
Возвращаясь к фиг. 2, на которой показан известный рычажный механизм 200, гидравлический привод/привод 120 показан в выдвинутом положении, когда привод 120 и шток 208 совмещены с углубленным участком 206 стойки 108 стрелы или проходят над ним. Углубленный участок стойки 108 стрелы необходим в известном механизме 200 потому, что соединительная точка 126 расположена между гидравлическим приводом 120 и стойкой 108 стрелы. Однако это уменьшает максимальную высоту подъема и ограничивает потенциальную величину усилия отрыва машины. Кроме того, углубленный участок стойки 304 стрелы снижает общую прочность стойки 108 стрелы, тем самым ограничивая высоту подъема, усилие отрыва и производительность машины в целом.
На фиг. 5 и 6, однако, показано положение гидравлического привода 314 относительно стойки 304 стрелы в иллюстративном рычажном механизме 300. Здесь каждый гидравлический привод 314 смещен к центральной линии 604 машины от соответствующей стойки 304 стрелы. На фиг. 6, например, рычажный механизм 300 находится в выдвинутом положении 600, тогда как на фиг. 5 он находится во втянутом положении 500. В результате, стойка 304 стрелы может содержать усиливающий участок 602, в котором отсутствует углубление. Стойка 304 стрелы имеет большую прочность и рычажный механизм 300 в целом может создавать большее усилие отрыва и большую максимальную высоту подъема.
Другим аспектом такого размещения гидравлического привода 314 относительно стойки 304 стрелы является улучшенный обзор для оператора машины. В известном рычажном механизме по фиг. 2, когда рычажный механизм 200 движется в направлении максимальной высоты подъема, стойка 108 стрелы и гидравлический привод 120 позиционируются в разных горизонтальных плоскостях относительно друг друга. Другими словами, гидравлический привод 120 расположен по существу под стойкой 108 стрелы с обеих сторон машины так, что оператор имеет уменьшенный или ограниченный обзор и слева, и справа. Однако, как показано на фиг. 3, третья соединительная точка 328 позволяет по существу выровнять гидравлический привод 314 в горизонтальном направлении или плоскости со стойкой 304 стрелы. Поэтому, когда рычажный механизм движется в направлении положения максимальной высоты подъема, площадь, занятая стойкой 304 стрелы, также занята гидравлическим приводом 314, что улучшает обзор с обеих сторон машины.
В дополнение к некоторым преимуществам, описанным выше, подъемный рычажный механизм 300 также дает дополнительные преимущества в отношении усилия отрыва и высоты подъема. Как показано на фиг. 7, графическое представление 700 является не ограничивающим примером кривой подъема иллюстративного рычажного механизма 300. В частности, первая кривая 702 подъема показана для компактного погрузчика серии 323Е, выпускаемого компанией Deere & Company. Первая кривая 702 подъема представляет машину, имеющую иллюстративный рычажный механизм 300. Вторая кривая 707 представляет машину с известным подъемным рычажным механизмом.
На Фиг. 7 и первая, и вторая кривые содержат высоту уровня земли или положение, представленное точкой 712 на графическом представлении 700. Эта высота соответствует высоте шарнирного пальца 306, который показан на фиг. 3. Первая кривая 702 иллюстрирует траекторию, по которой следует шарнирный палец 306 от положения уровня земли (т.е. точки 712) до положения максимальной высоты подъема (т.е. точки 708). Кроме того, вторая кривая 704 для известного подъемного рычажного механизма имеет максимальную высоту подъема, представленную точкой 714 на графическом представлении 700. Как показано на чертеже, первая кривая 702 может достигать большей максимальной высоты подъема по сравнению со второй кривой 704, поскольку точка 708 максимальной высоты подъема смещена вправо от точки 714 высоты подъема.
Кроме того, подъемный рычажный механизм 300 имеет кривую 702 подъема, которая обладает лучшей "способностью к вытягиванию", т.е. расстоянием между задней осью и шарнирным пальцем 306. Более конкретно, кривая 702 подъема может содержать три разные области. В первой области 706 кривая 702 подъема имеет первый наклон 716, который значительно больше, чем наклон второй кривой 704. Это может позволить машине достичь большего усилия отрыва на уровне, близком к уровню земли. Усилие отрыва может быть существенно большим для первой кривой 702 подъема из-за изменения положения гидравлического привода 314 относительно стойки 304 стрелы. В частности, изменение положения или смещенное положение гидравлического привода 314 может дать большее плечо момента или больший рычаг на навесном оборудовании или инструменте на всей траектории подъема.
Первая кривая 702 подъема переходит от первой области с увеличенным наклоном ко второй области 718, в которой кривая начинает выравниваться и имеет уменьшенный наклон по сравнению с первым наклоном 716. Когда рычажный механизм 300 движется в направлении положения 708 максимальной высоты подъема, первая кривая 702 подъема переходит в третью область 710, где наклон начинает немного увеличиваться. Поэтому во второй области 718 кривая 702 подъема содержит точку частичного перегиба или точку в меньшей степени увеличивающегося наклона по сравнению с первой областью 706 и второй областью 710. В результате, на основе варианта по фиг. 7, иллюстративный подъемный рычажный механизм 300 может создавать увеличенное отрывное усилие в первой области 706 и более высокую максимальную высоту 708 подъема в третьей области, в то же время обладая более высокой способностью к вытягиванию по сравнению с известным рычажным механизмом, представленным второй кривой 7-4.
На фиг. 8 далее показано усилие отрыва иллюстративного подъемного рычажного механизма 300 в виде второго графического представления 800. Здесь кривая 802 показана для компактного погрузчика серии 323Е, выпускаемого компанией Deere & Company. Кривая 802 имеет по существу вогнутую форму и имеет первый участок 804 с увеличивающимся наклоном, где определяется усилие отрыва. В этой первой области 804 кривая 802 иллюстрирует, когда машина обладает усилием отрыва приблизительно 2200 кгс. Это усилие достигает максимума во второй области 806, после чего падает в третьей области 808. При сравнении в английских единицах измерения известный подъемный рычажный механизм может создавать усилие отрыва приблизительно 3700 фунтов (приблизительно 1680 кг), тогда как иллюстративный подъемный рычажный механизм может создавать усилие отрыва 4700 фунтов (приблизительно 2130 кг). Здесь величина силы или гидравлического давления от гидравлических приводов остается одинаковой, но иллюстративная конструкция рычажного механизма 300 позволяет создать большее усилие отрыва рядом с уровнем земли, достигать большей максимальной высоты подъема и иметь большую "способность к вытягиванию" по сравнению с известным рычажным механизмом.
Хотя выше были описаны иллюстративные варианты, в которых воплощены принципы настоящего изобретения, настоящее изобретение не ограничивается описанными вариантами. Настоящая заявка охватывает любые изменения, варианты применения или адаптации изобретения с использованием его общих принципов. Далее, настоящая заявка охватывает такие варианты настоящего изобретения, которые попадают в сферу известной или обычной практики в той области техники, к которой относится настоящее изобретение и которые входят в объем приложенной формулы изобретения.
Реферат
Изобретение относится к подъемному рычажному механизму для рабочей машины, имеющей рабочий инструмент. Подъемный рычажный механизм содержит раму, стойку стрелы, верхний рычаг, нижний рычаг и гидравлический привод. Стойка стрелы выполнена с возможностью шарнирного соединения с рабочим инструментом и имеет поверхность, которая определяет продольную ось. Первый конец верхнего рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Первый рычаг нижнего рычага шарнирно соединен с рамой, а второй конец шарнирно соединен со стойкой стрелы. Гидравлический привод имеет шток, шарнирно соединенный со стойкой стрелы, и перемещается между втянутым положением и выдвинутым положением. Верхний рычаг, нижний рычаг и гидравлический привод разнесены от продольной оси. 3 н. и 17 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для перемещения и погрузки и разгрузки материала и способ его эксплуатации (варианты)
Комментарии