Канавокопатель с автоматическим врезанием и регулировкой глубины стрелы - RU2515140C2
Код документа: RU2515140C2
Чертежи


















Описание
Область изобретения
Настоящее изобретение в общем имеет отношение к области землеройных работ, а более конкретно, к системам и способам управления приспособлением для экскавации во время экскавации.
Предпосылки к созданию изобретения
Известны различные типы машин для экскавации, которые позволяют производить землеройные работы в положении 37 над поверхностью земли и используют снабженный приводом инструмент для экскавации для проникновения в грунт на заданную глубину d. Некоторые машины для экскавации выполнены так, что сначала производят выемку грунта главным образом в вертикальном направлении от поверхности земли, а затем приступают к экскавации главным образом в горизонтальном направлении. В случае этих и других машин для экскавации время, которое требуется для завершения начальной вертикальной экскавации, типично является значительным.
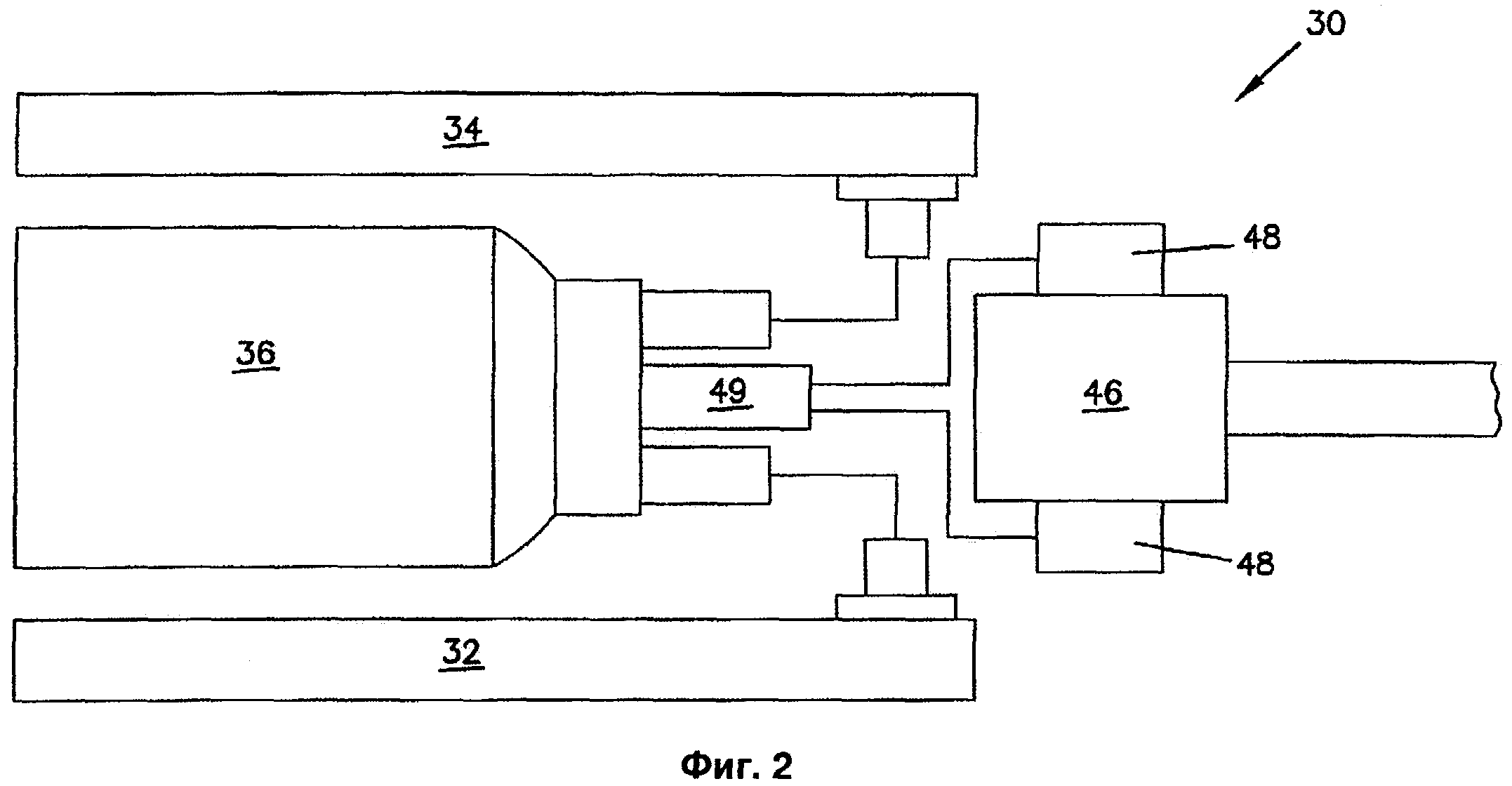
Одну такую машину для экскавации, которая осуществляет первоначальную вертикальную экскавацию ранее горизонтальной экскавации, называют гусеничным канавокопателем. Гусеничный канавокопатель 30, показанный на фиг.1 и 2, типично содержит двигатель 36, соединенный с приводом левой гусеницы 32 и с приводом правой гусеницы 34, которые совместно образуют участок 45 тягача гусеничного канавокопателя 30. Приспособление 46, обычно установленное на стреле 47, типично соединено с задней частью участка 45 тягача и типично осуществляет специфический тип землеройной работы.
Цепь 50 канавокопателя часто используют для рытья относительно широких канав (траншей) с относительно высокой скоростью. Цепь 50 канавокопателя обычно остается над землей в транспортной конфигурации 56, когда канавокопатель 30 маневрирует на рабочей площадке. Во время экскавации цепь 50 канавокопателя опускают в положение 39 ниже поверхности земли, при этом канавокопатель 30 проникает в землю и выкапывает канаву на желательной глубине и с желательной скоростью, находясь в конфигурации 58 проходки канавы.
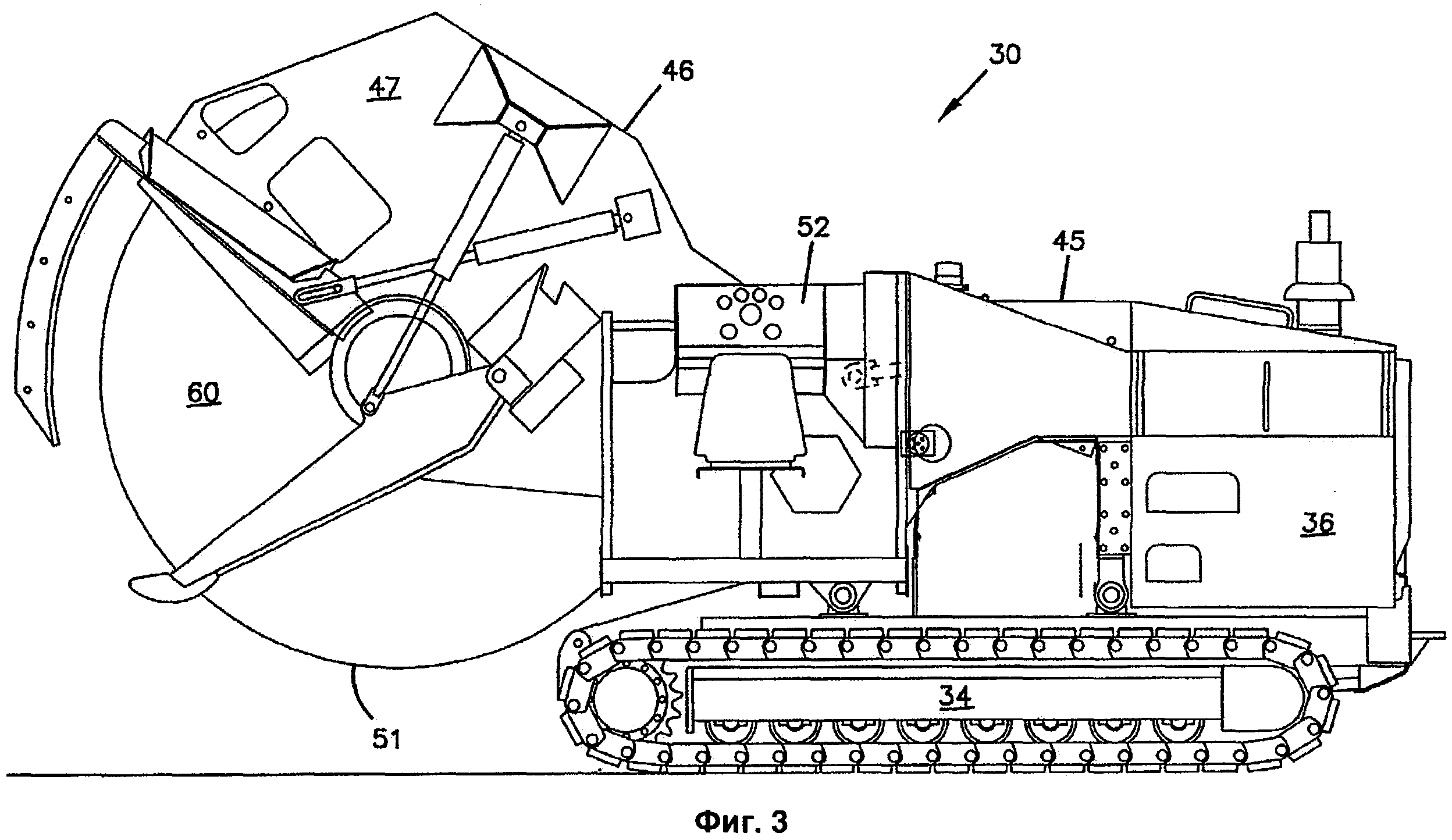
Другим популярным приспособлением для землеройных работ является так называемое колесо 60 для скальной породы, показанное на фиг.3, которое может работать аналогично цепи 50 канавокопателя. Известны также дополнительные приспособления, такие как TERRAIN LEVELER™, выпускаемые фирмой Vermeer Manufacturing Company of Pella, Iowa (США), которые также работают аналогичным образом.
В машине для экскавации типа гусеничного канавокопателя типично используют один или несколько датчиков, которые контролируют различные физические параметры машины. Полученную при помощи этих датчиков информацию обычно используют как входные данные для регулировки различных функций машины и/или для снабжения оператора информацией типично за счет передачи преобразованного сигнала датчика на один или несколько экранов 500 или дисплеев, таких как, например, тахометр.
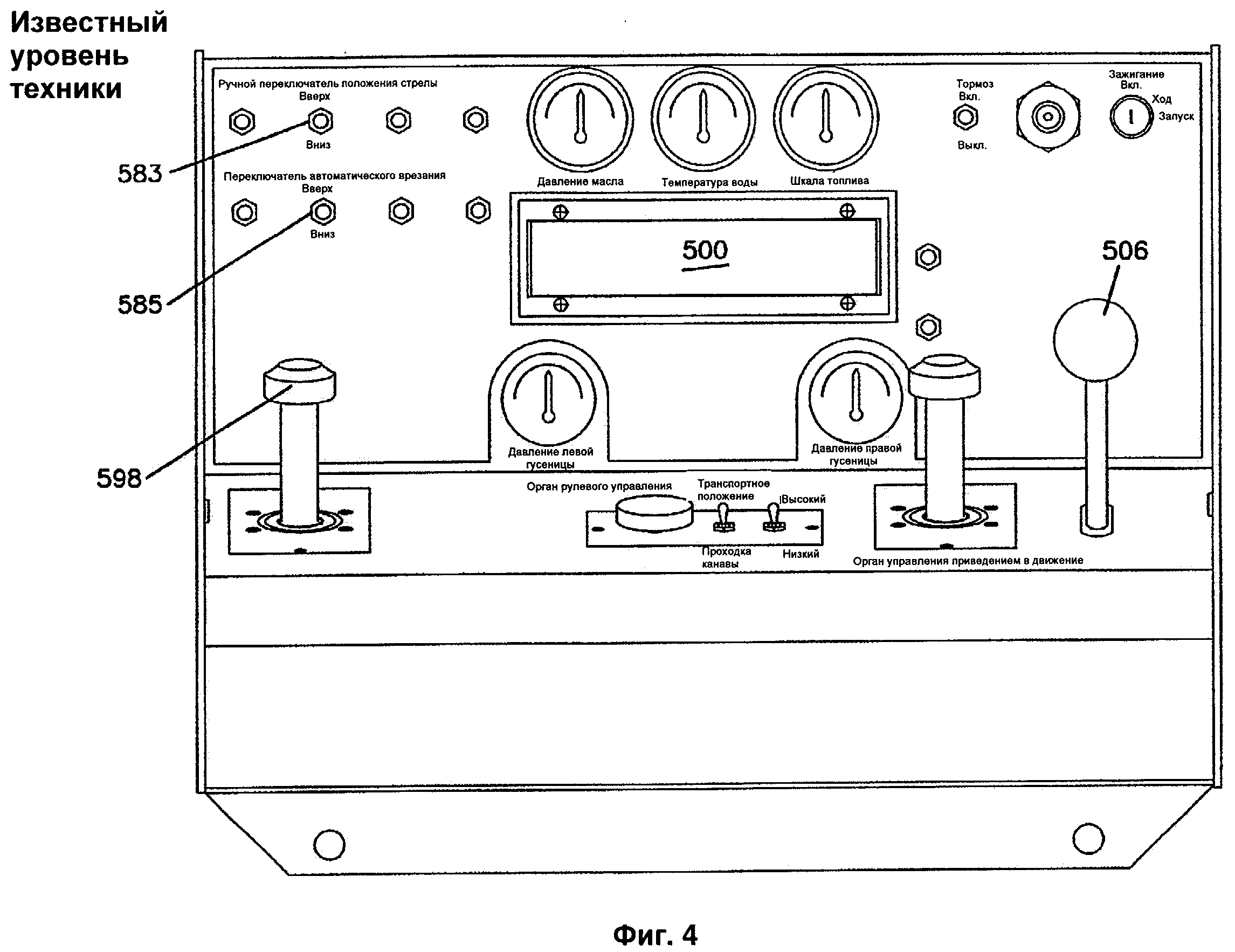
Как это показано на фиг.4, типично предусмотрен ручной переключатель 583 положения стрелы (вверх/вниз), который позволяет оператору управлять перемещением и вертикальным положением приспособления 46. Типично предусмотрен также переключатель 585 автоматического врезания (auto-plunge), который позволяет оператору управлять перемещением и положением стрелы 47 приспособлениясовместно с регулированием с обратной связью частоты вращения двигателя 36. Регулирование с обратной связью типично позволяет регулировать частоту вращения двигателя 36 и уменьшать скорость перемещения стрелы 47 приспособления при тяжелой нагрузке двигателя и увеличивать скорость перемещения стрелы 47 приспособления при легкой нагрузке двигателя. Типично предусмотрен также орган 598 управления частотой вращения привода приспособления, который позволяет оператору выбирать и подстраивать частоту вращения привода 46 приспособления. Типично предусмотрена также дроссельная заслонка 506 двигателя, позволяющая ограничивать частоту вращения двигатель 36. Эти органы управления позволяют оператору поднимать и опускать приспособление 46 между положением 37 выше поверхности земли и положением 39 ниже поверхности земли и производить работу по экскавации, называемую врезанием (plunge-cut).
Обычно желательно поддерживать постоянный уровень выходной мощности двигателя 36 во время экскавации, что, в свою очередь, позволяет приспособлению 46 для проходки канавы производить проходку канавы при постоянном уровне выходной мощности. В некоторых применениях желательно поддерживать максимальный уровень выходной мощности двигателя 36. Управление канавокопателем 30 во время экскавации с врезанием за счет использования системы управления с обратной связью, описано в патенте США 5768811, устраняет необходимость в том, чтобы оператор делал частые подстройки при помощи ручного переключателя 583 положения стрелы, для того чтобы поддерживать заданный выходной уровень двигателя.
Предприятия-изготовители машин для экскавации стремятся к тому, чтобы снизить до минимума трудности работы таких машин и повысить их производительность при экскавации, а более конкретно, при врезании. Желательно также, чтобы эти высокие уровни производительности при экскавации и при врезании могли быть обеспечены при различных условиях эксплуатации и окружающей среды и чтобы машина для экскавации могла подстраиваться и приспосабливаться к этим изменяющимся условиям. Более того, операторы таких машин для экскавации хотели бы задавать желательную глубину d, до которой машина производит выемку грунта, и хотели бы, чтобы эта глубина d автоматически поддерживалась без дальнейшего вмешательства оператора. Настоящее изобретение позволяет удовлетворить эти и другие потребности.
Краткое изложение изобретения
Настоящее изобретение имеет отношение к созданию системы и способа управления приспособлением для экскавации во время экскавации между положением выше поверхности земли и положением ниже поверхности земли. Приспособление для экскавации соединено с машиной для экскавации, имеющей двигатель. Положение и скорость изменения положения приспособления для экскавации регулируют за счет использования изменяемой оператором связи между частотой вращения двигателя и множителем нагрузки. Положение и скорость изменения положения приспособления для экскавации дополнительно регулируют за счет использования изменяемой оператором связи между частотой вращения привода приспособления и множителем приспособления, Компьютер контролирует положение приспособления для экскавации и скорость, при которой приспособление для экскавации перемещается главным образом в вертикальном направлении при выемке грунта между положениями выше поверхности земли и ниже поверхности земли.
Датчики измеряют рабочие параметры, связанные с характеристиками двигателя и с характеристиками приспособления для экскавации, когда приспособление для экскавации продвигается в земле за счет выемки грунта. Компьютер изменяет работу приспособления для экскавации в ответ на измеренные датчиками рабочие параметры, так чтобы поддерживать заданный уровень выходного сигнала двигателя, когда изменяется нагрузка двигателя при перемещении приспособления для экскавации между положениями выше поверхности земли и ниже поверхности земли. Более того, компьютер изменяет работу приспособления для экскавации в ответ на измеренные датчиками рабочие параметры, так чтобы поддерживать заданную частоту вращения привода приспособления для экскавации на заданной частоте вращения, когда изменяется нагрузка приспособления для экскавации при перемещении приспособления для экскавации между положениями выше поверхности земли и ниже поверхности земли. Реакция компьютера на измеренные датчиками рабочие параметры и изменения нагрузки двигателя и приспособления для экскавации может быть подстроена оператором за счет задания измененной связи между частотой вращения двигателя и множителем нагрузки и дополнительно подстроена оператором за счет задания измененной связи между частотой вращения привода приспособления и множителем приспособления.
В соответствии с некоторыми вариантами настоящего изобретения машина для экскавации в виде гусеничного канавокопателя содержит стрелу, шарнирно установленную на машине для экскавации и поддерживающую бесконечную землеройную цепь. Цилиндр, связанный с машиной для экскавации и со стрелой, производит перемещение стрелы при экскавации между положением выше поверхности земли и положением ниже поверхности земли. Датчик положения стрелы определяет положение цилиндра и/или стрелы и вырабатывает соответствующий сигнал, передаваемый в компьютер. Оператор задает желательную глубину экскавации, информация о которой поступает в компьютер. Регулируемый клапан в ответ на поступление сигналов управления от компьютера или другого устройства управления регулирует перемещение цилиндра, чтобы изменять скорость перемещения стрелы и положение стрелы. Компьютер и/или устройство управления, связанные с двигателем и с регулируемым клапаном, управляют регулируемым клапаном так, чтобы изменять скорость перемещения стрелы таким образом, чтобы поддерживать заданный уровень выходного сигнала двигателя, когда стрела перемещается при экскавации между положениями выше поверхности земли и ниже поверхности земли. Компьютер и/или устройство управления, связанные с приводом приспособления и с регулируемым клапаном, управляют регулируемым клапаном так, чтобы изменять скорость перемещения стрелы таким образом, чтобы поддерживать заданную частоту вращения привода приспособления, когда стрела перемещается при экскавации между положениями выше поверхности земли и ниже поверхности земли. Компьютер и/или устройство управления, связанные с датчиком положения стрелы и с регулируемым клапаном, управляют регулируемым клапаном так, чтобы изменять положение стрелы таким образом, чтобы при экскавации получать и поддерживать желательную глубину экскавации.
Краткое описание чертежей
На фиг.1 показан вид сбоку справа гусеничного канавокопателя, который содержит приспособление для проходки канав в виде цепи канавокопателя, в рабочем положении установленное на стреле приспособления.
На фиг.2 показан обобщенный вид сверху гусеничного канавокопателя, который содержит привод правой гусеницы, привод левой гусеницы и привод приспособления.
На фиг.3 показан вид сбоку справа гусеничного канавокопателя, который содержит связанное с ним приспособление для проходки канав в виде колеса для скальной породы.
На фиг.4 показан вид спереди известного пульта управления гусеничного канавокопателя, который содержит орган управления частотой вращения приспособления, дроссельную заслонку двигателя (сектор газа двигателя), орган управления стрелой приспособления и дисплей.
На фиг.5 показан вид в перспективе пульта управления гусеничного канавокопателя, который содержит ручку регулятора нагрузки, дроссельную заслонку двигателя, орган управления частотой вращения приспособления, ручной орган управления стрелой, переключатель автоматического врезания и дисплей с множеством кнопок навигации и выбора в меню.
На фиг.6 показан вид спереди пульта управления, показанного на фиг.5.
На фиг.7 показан вид сбоку слева гусеничного канавокопателя, показанного на фиг.1, со стрелой приспособления в конфигурации выше поверхности земли, до осуществления операции врезания.
На фиг.8 показан вид сбоку слева гусеничного канавокопателя, показанного на фиг.1, со стрелой приспособления, находящейся в положении перехода от конфигурации выше поверхности земли в конфигурацию ниже поверхности земли.
На фиг.9 показан вид сбоку слева гусеничного канавокопателя, показанного на фиг.1, со стрелой приспособления, находящейся в конфигурации ниже поверхности земли, после завершения операции врезания.
На фиг.10 показан вид сбоку слева исполнительного механизма стрелы во втянутой конфигурации, оперативно соединенного с датчиком положения стрелы.
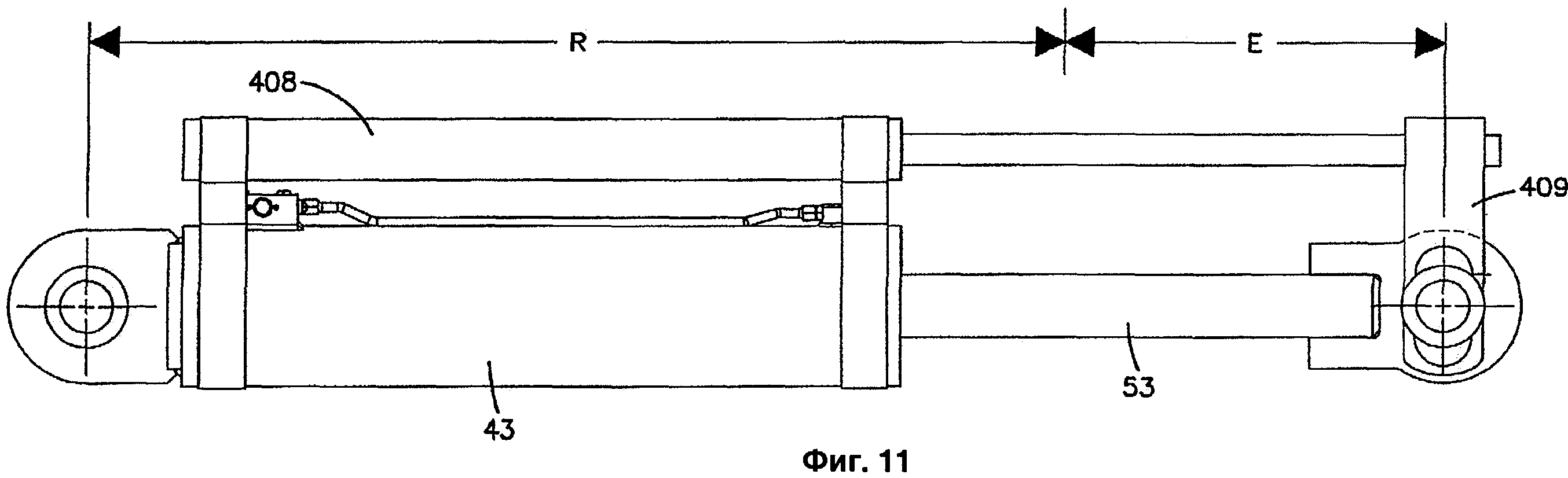
На фиг.11 показан вид сбоку слева исполнительного механизма стрелы в выдвинутой конфигурации, оперативно соединенного с датчиком положения стрелы.
На фиг.12 показана блок-схема компьютерной схемы управления работой врезания стрелы гусеничного канавокопателя с использованием ручки регулятора нагрузки, переключателя режима автоматического врезания, ручного управления стрелой, датчика положения стрелы и дисплея с кнопками навигации и выбора в меню.
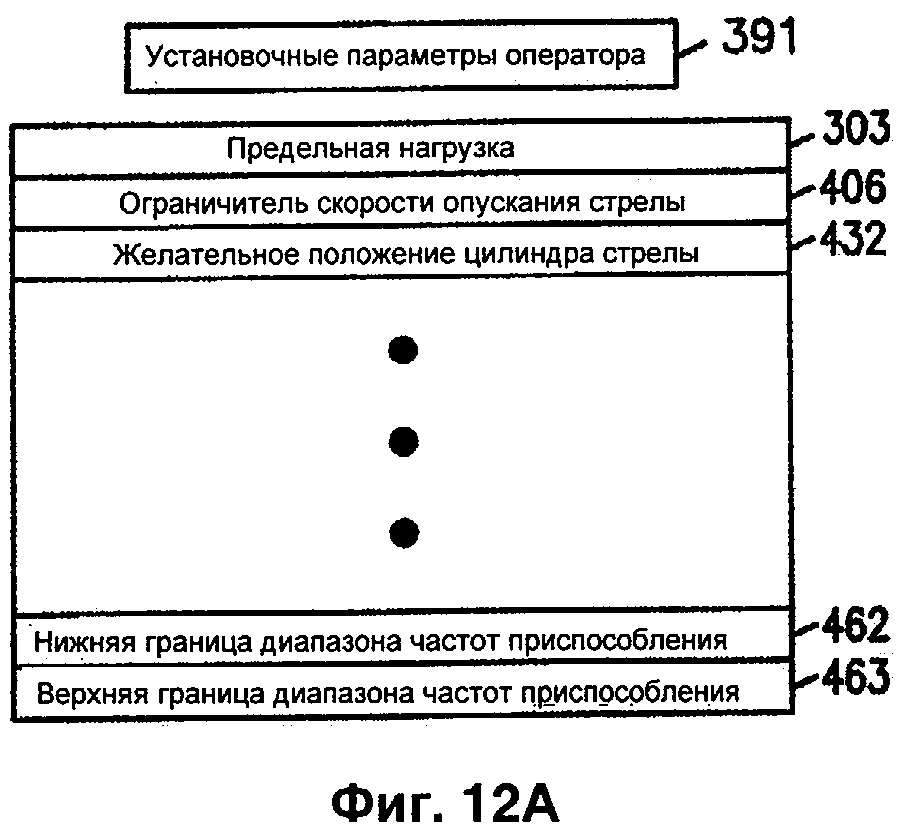
На фиг.12А показана блок-схема с примерным списком переменных (параметров), связанных с множеством уставок (настроек) оператора, использованных в компьютерной схеме, показанной на фиг.12.
На фиг.12В показана блок-схема с примерным списком переменных, связанных с множеством расчетных значений, вычисленных при помощи компьютерной схемы, показанной на фиг.12, и использованных в ней.
На фиг.12С показана блок-схема с примерным списком переменных, связанных с множеством предварительно заданных значений, использованных в компьютерной схеме, показанной на фиг.12.
На фиг.12D показана блок-схема с примерным списком переменных, связанных с множеством опорных значений, использованных в компьютерной схеме, показанной на фиг.12.
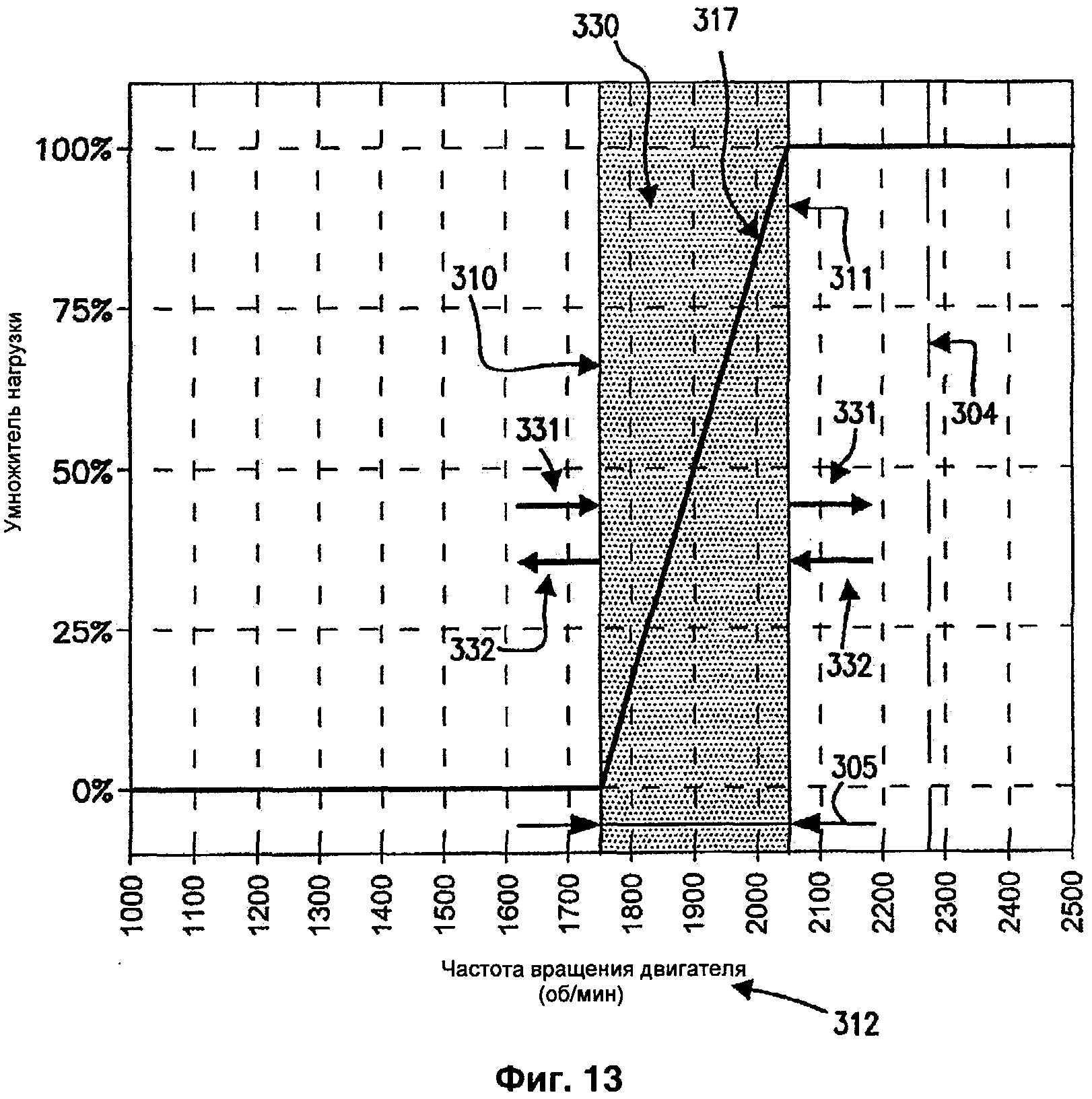
На фиг.13 показан график множителя нагрузки в зависимости от частоты вращения двигателя при специфической уставке, а также показан изменяемый относительный диапазон множитель нагрузки/ частота вращения двигателя, с верхней границей и нижней границей.
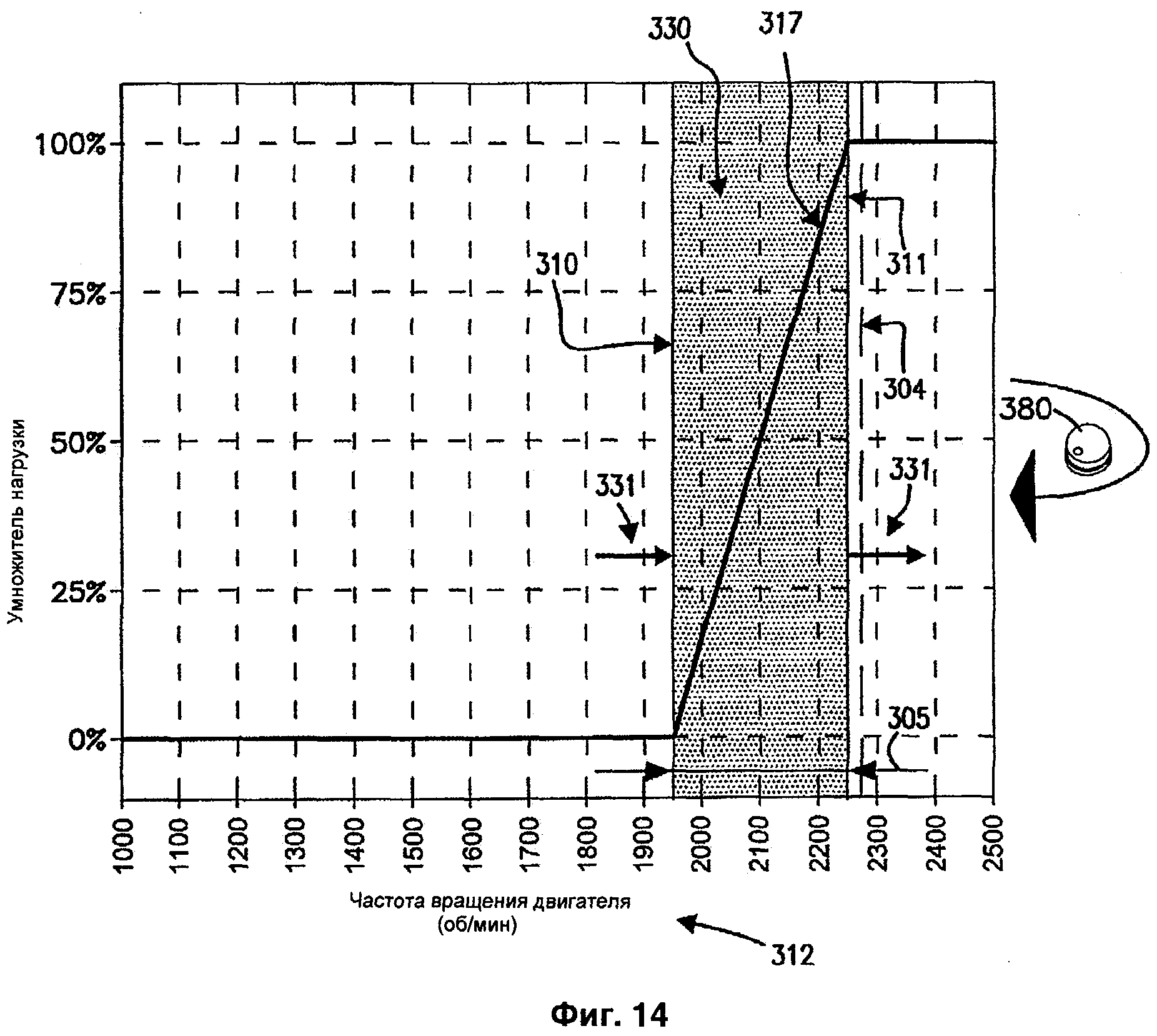
На фиг.14 показаны изменяемый относительный диапазон и график, показанные на фиг.13, где местоположение диапазона увеличено за счет поворота по часовой стрелке ручки регулятора нагрузки.
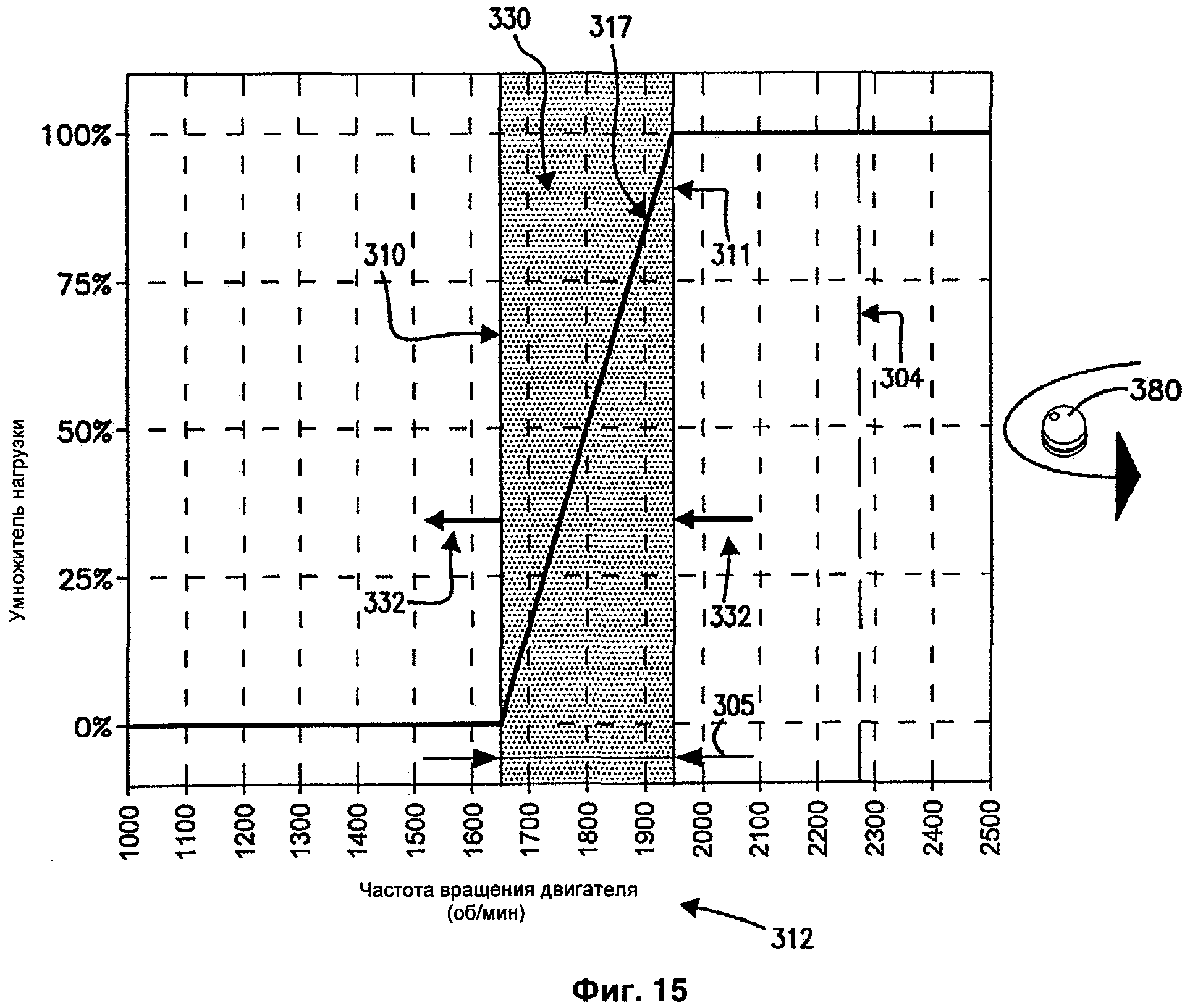
На фиг.15 показаны изменяемый относительный диапазон и график, показанные на фиг.13, где местоположение диапазона уменьшено за счет поворота против часовой стрелки ручки регулятора нагрузки.
На фиг.16 показан график множителя приспособления в зависимости от частоты вращения привода приспособления при специфической уставке, а также показан изменяемый относительный диапазон множитель приспособления / частота вращения (привода) приспособления, с верхней границей и нижней границей.
На фиг.17 показана блок-схема варианта регулируемого клапана, который получает сигналы от компьютерной схемы и регулирует перемещение и положение исполнительного механизма стрелы, с обратной связью от датчика положения стрелы.
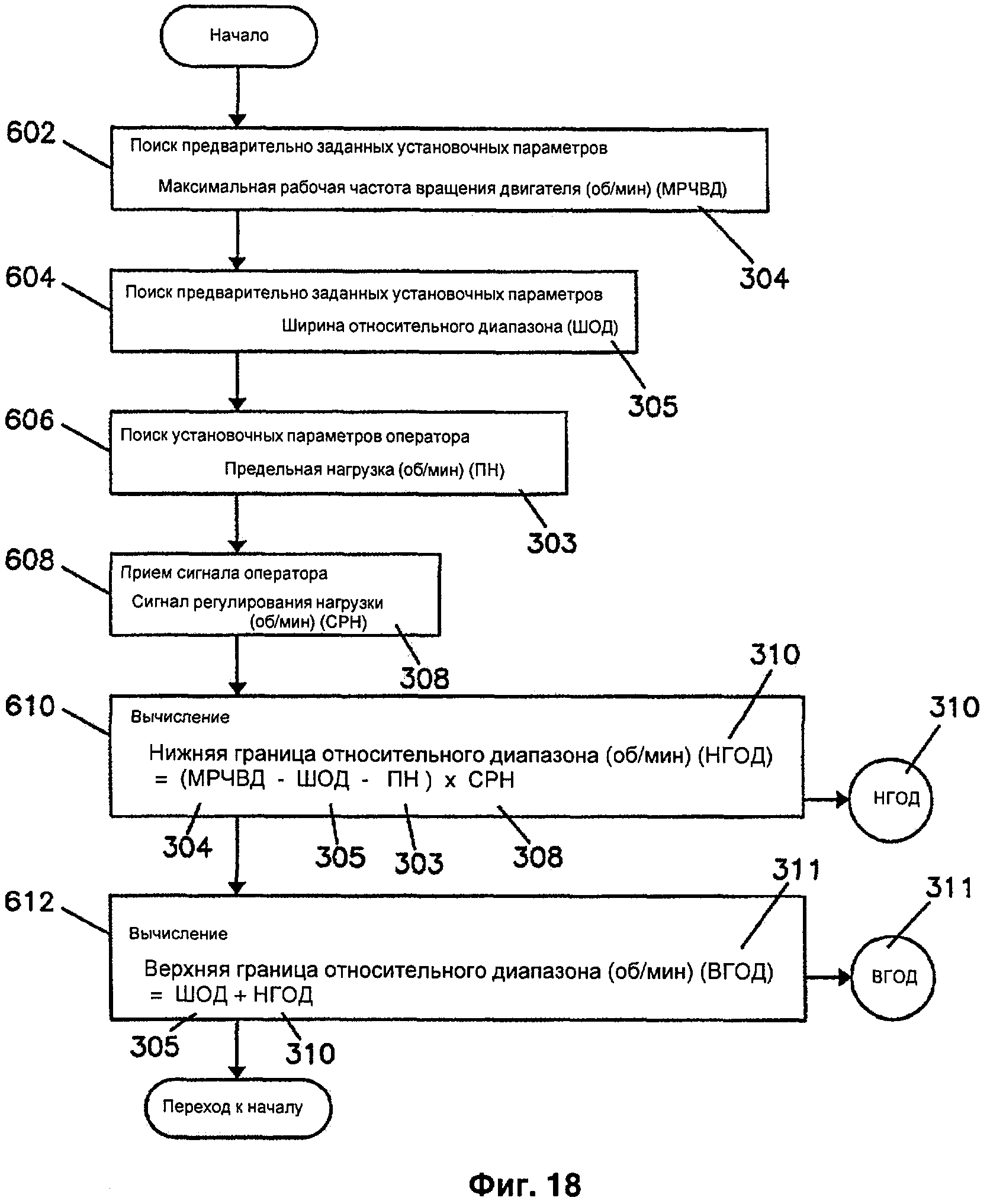
На фиг.18 показан способ управления для вычисления границ относительного диапазона множитель нагрузки/ частота вращения двигателя, показанного на фиг.13-15, при заданных входных параметрах тока.
На фиг.19 показан способ управления для вычисления множителя нагрузки, показанного на фиг.13-15, при заданных входных параметрах тока.
На фиг.20 показан способ управления для вычисления множителя приспособления, показанного на фиг.16, при заданных входных параметрах тока.
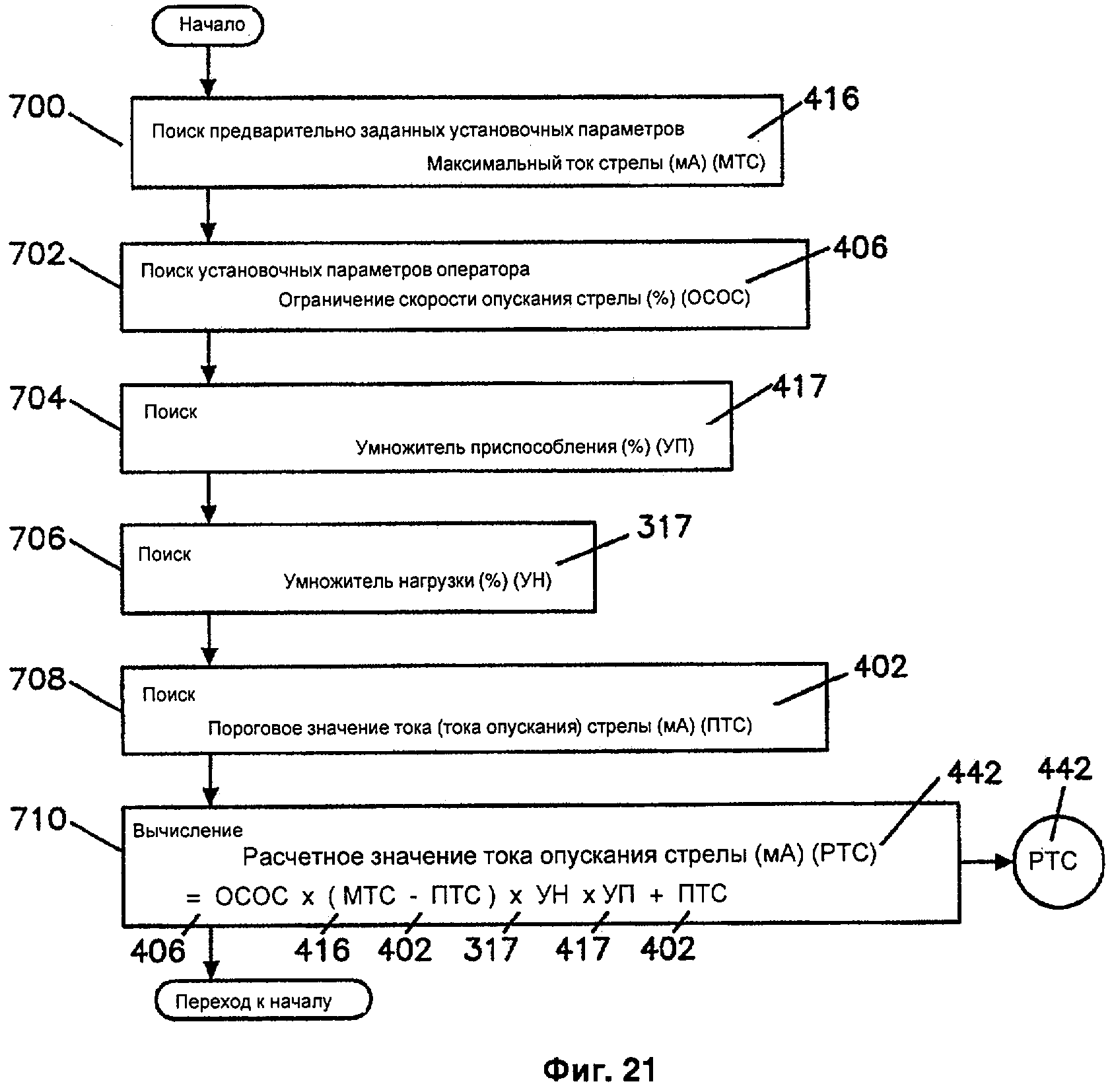
На фиг.21 показан способ управления для вычисления расчетного тока опускания стрелы, при заданных входных параметрах тока.
На фиг.22 показан способ управления для вычисления предварительного тока опускания стрелы и предварительного тока подъема стрелы, при заданных входных параметрах тока.
На фиг.23 показан способ управления для вычисления тока опускания стрелы при автоматическом врезании и тока подъема стрелы при автоматическом врезании, при заданных входных параметрах тока.
На фиг.24 показан способ управления для вычисления тока опускания стрелы и тока подъема стрелы, при заданных входных параметрах тока.
Подробное описание изобретения
Настоящее изобретение имеет отношение к созданию системы и способа управления приспособлением 51 для экскавации машины для экскавации, при выемке грунта между положением 37 выше поверхности земли и положением 39 ниже поверхности земли.
Обратимся теперь к рассмотрению фиг.7-9, на которых показана машина для экскавации в виде гусеничного канавокопателя 30, который содержит стрелу 47, шарнирно установленную на участке 45 тягача гусеничного канавокопателя 30. Участок 45 тягача содержит привод 34 правой гусеницы, привод 32 левой гусеницы и двигатель 36. Стрела 47, на которой в рабочем положении смонтирована бесконечная землеройная цепь 50, установлена между положениями 37 и 39 выше поверхности земли и ниже поверхности земли, за счет срабатывания гидравлического цилиндра 43, связанного со стрелой 47 и с участком 45 тягача гусеничного канавокопателя 30. Цилиндр 43 содержит раздвижной шток 53, который механически связан со стрелой 47. С цилиндром 43 при помощи элемента 409 связи связан датчик 408 положения стрелы, как это показано на фиг.10 и 11, который подает сигнал 410 положения стрелы в компьютерную схему 182. Как это показано на фиг.17, регулируемый клапан 41 регулирует поток рабочей жидкости, поступающей в гидравлический цилиндр 43, в ответ на сигнал 414 управления клапаном опускания стрелы и сигнал 415 управления клапаном поднимания стрелы, вырабатываемые при помощи компьютерной схемы 182, как это описано далее более подробно.
В примерной конфигурации компьютерная схема 182 содержит множество контроллеров и других компонентов в соответствии со стандартом PLUS+1™ фирмы Sauer-Danfoss, Inc. of Ames, Iowa (США). Примерные модули контроллера содержат МС050-010 модуль контроллера, МС050-020 модуль контроллера, 1Х024-010 входной модуль и 0Х024-010 выходной модуль, которые все могут быть закуплены на фирме Sauer-Danfoss, Inc. of Ames, Iowa (США). В примерной конфигурации различные параметры хранят в долговременной (энергонезависимой) памяти, а программы хранят в EPROM (СППЗУ).
Как это показано на фиг.7-9 и 12, стрела 47 представляет собой компонент и основной каркас приспособления 46, которое дополнительно содержит двигатель 48 привода приспособления, преимущественно получающий энергию от насоса 49 привода приспособления. Датчик 186 частоты вращения преимущественно связан с двигателем 48 привода приспособления и вырабатывает сигнал 324 частоты вращения привода приспособления. Насос 49 привода приспособления, получающий энергию от (основного) двигателя 36, преимущественно регулирует поток гидравлического масла, поступающего в двигатель 48 привода приспособления, который, в свою очередь, приводит в действие приспособление 46. Насос 49 привода приспособления преимущественно получает команды за счет сигнала 322 управления насосом привода приспособления, вырабатываемого при помощи компьютерной схемы 182, как это показано на фиг.12. Альтернативно, сигналы управления приспособлением могут поступать на двигатель 48 приспособления. Один или несколько двигателей 48 привода приспособления и один или несколько насосов 49 привода приспособления могут быть использованы вместе в параллельном гидростатическом контуре.
В соответствии с некоторыми вариантами настоящего изобретения работой двигателя 48 привода приспособления управляют при помощи датчика 186 частоты вращения. Выходной сигнал 324 датчика 186 передают в компьютерную схему 182. В соответствии с некоторыми вариантами настоящего изобретения рабочее гидравлическое давление, созданное между двигателем 48 привода приспособления и насосом 49 привода приспособления, контролируют при помощи датчика давления, выходной сигнал которого в виде сигнала 323 гидростатического давления привода приспособления передают в компьютерную схему 182.
В соответствии с предпочтительным вариантом приспособление 46 связано с задней частью участка 45 тягача гусеничного канавокопателя 30. Известны различные приспособления 46, каждое из которых предназначено для выполнения специфического типа экскавации. На фиг.1 показан тип приспособления 46, в котором используют землеройную цепь 50, а на фиг.3 показано приспособление 46, в котором используют колесо 60 для скальной породы. Известны также и другие приспособления 46, такие как TERRAIN LEVELER™, выпускаемые фирмой Vermeer Manufacturing Company of Pella, Iowa (США). Настоящее изобретение может быть использовано с различными описанными здесь приспособлениями 46 и с другими приспособлениями.
В соответствии с вариантом, показанным на фиг. 7-9, гусеничный канавокопатель 30 первоначально устанавливают в желательном местоположении экскавации, со стрелой 47, поднятой в положение 37 выше поверхности земли. Типичная работа по экскавации включает в себя две операции экскавации. Первая операция, которую называют операцией врезания, предусматривает выемку грунта или удаление иным образом грунта между уровнем поверхности земли (показанным на фиг.8) и уровнем экскавации ниже поверхности земли, показанным как глубина d на фиг.9. Типичная глубина d канавы лежит в диапазоне ориентировочно от двух футов до двадцати футов для гусеничного канавокопателя 30 такого типа, который показан на фиг.7-9. После завершения операции врезания, в которой стрела 47 проникает в грунт на желательную глубину d экскавации, при необходимости проводят вторую операцию экскавации, которую называют операцией проходки канавы. Типичная процедура проходки канавы предусматривает удержание стрелы 47 на глубине d экскавации и перемещение участка 45 тягача и, таким образом, перемещение приспособления 46 гусеничного канавокопателя 30 в желательном направлении, за счет чего производят выемку грунта из канавы от начального местоположения врезания до желательного концевого местоположения канавы.
Проходку канавы производят при подаче гидравлической мощности в приспособление 46 и приводы гусениц 32 и 34, когда гусеничный канавокопатель 30 находится в положении 39 ниже поверхности земли. Врезание производят при подаче гидравлической мощности в приспособление 46 и в цилиндр 43 стрелы, в направлении опускания стрелы 47 (см. фиг.17). Проходку канавы и врезание можно производить одновременно, за счет чего получают канаву с увеличивающейся глубиной d. Во время проходки канавы, врезания или их комбинации гидравлическая мощность вызывает перемещение на активном участка приспособления 46, то есть перемещение землеройной цепи 50 или колеса 60 для скальной породы. На активном участка приспособления 46 при необходимости могут быть установлены инструменты для экскавации, изготовленные из подходящего твердого материала, такие как зубья из карбида металла или другие режущие инструменты. Гидравлическая мощность, подаваемая в приводы гусениц 32 и 34 и/или в цилиндр 43 стрелы, перемещает активный участок приспособления 46 так, чтобы переместить подземный участок приспособления 46 в нетронутый грунт. Активный участок приспособления 46 и установленные на нем инструменты входят в зацепление с грунтом, разрушают его и уносят его из вырытой зоны.
При проведении операции врезания в почву, которая имеет изменяющиеся геофизические характеристики, возникают сопутствующие изменения трудности экскавации, когда приведенные в действие землеройная цепь 50 и стрела 47 перемещаются из положения 37 выше поверхности земли, через почву с изменяющимися геофизическими характеристиками, на глубину d экскавации. Кроме того, врезание или проходка канавы в случае почвы со значительными геофизическими изменениями в смежных слоях может приводить к обламыванию и смещению более твердого слоя, который слабо поддерживается мягким смежным слоем. Смещенный твердый слой может заклинивать режущие инструменты и вызывать заедание землеройной цепи 50 и остановку привода приспособления 46.
Система управления автоматически отвечает на остановку привода приспособления, без необходимости вмешательства оператора, подъемом стрелы 47, пока не будет устранено заедание. После этого стрелу 47 вновь опускают и возобновляют врезание и/или проходку канавы.
Система и способ управления изменяют, без необходимости вмешательства оператора, работу приспособления 51 для экскавации при выемке грунта между положениями выше поверхности земли и ниже поверхности земли, таким образом, чтобы поддерживать заданные рабочие режимы двигателя 36, приводящего в действие приспособление 51 для экскавации, в ответ на изменения нагрузки двигателя в процессе экскавации. Аналогичным образом, система и способ управления одновременно изменяют работу приспособления 51 для экскавации так, чтобы поддерживать заданную частоту вращения привода приспособления 46 в процессе экскавации.
Система и способ управления задают и после этого поддерживают, без необходимости вмешательства оператора, желательную глубину d экскавации. В соответствии с одним из вариантов желательное положение 432 стрелы (или цилиндра стрелы) выбирает оператор. Компьютерная схема 182 сравнивает желательное положение 432 стрелы с сигналом 410 положения стрелы, полученным от датчика 408 положения стрелы. Расхождение между желательным положением 432 и сигналом 410 положения стрелы приводит к выработке корректирующего сигнала 414 опускания стрелы или корректирующего сигнала 415 подъема стрелы, поступающих на регулируемый клапан 41. Это приводит к перемещению стрелы 47 в положение, расположенное ближе к желательному положению 432. Этот процесс многократно повторяют до достижения желательного положения 432. После этого указанный процесс многократно повторяют, чтобы поддерживать желательное положение 432 при возмущениях, которые могут быть введены в систему.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения в системе управления используют различные сигналы и установочные параметры для выполнения ее различных задач и функций. В соответствии с настоящим изобретением эти переменные величины системы управления могут быть подразделены на семь основных категорий. Эти категории могут перекрывать друг друга и введены просто для упорядочения описания изобретения. Следует иметь в виду, что эти и другие элементы настоящего изобретения также могут быть классифицированы при помощи других способов, поэтому приведенный ниже способ классификации не следует рассматривать как ограничивающий настоящее изобретение.
В соответствии с некоторыми вариантами некоторые из различных сигналов и установочных параметров 391, 392, 393 и 394 хранят в энергонезависимой памяти в компьютерной схеме 182, как это показано на фиг.12. Другие сигналы и установочные параметры могут представлять собой выходной сигнал, поступающий от рычага или ручки управления, или цифровой сигнал, поступающий от такого компонента, как двигатель 36.
Первая категория сигналов и установочных параметров системы управления содержит группу предварительно заданных установочных параметров 393, которые предварительно заданы при изготовлении системы управления. Примеры таких предварительно заданных установочных параметров 393 показаны на фиг.12С. Эти параметры включают в себя максимальную рабочую частоту 304 вращения двигателя (об/мин), ширину 305 относительного диапазона 330 (об/мин) и значение 416 сигнала управления клапаном, вызывающее его максимальное открывание. Другие варианты настоящего изобретения позволяют задавать и/или повторно устанавливать некоторые или все из указанных параметров в другое время.
Вторая категория сигналов и установочных параметров содержит группу опорных значений 394, полученных во время процедуры калибровки. Примеры этих опорных значений 394 показаны на фиг.12D. Эти значения включают в себя пороговое значение 402 выходного сигнала управления опусканием стрелы, поступающего на регулируемый клапан 41. Способ калибровки для определения этого значения просто предусматривает увеличение сигнала 414 управления опусканием стрелы, поступающего на регулируемый клапан 41, пока не начнется движение штока 53 цилиндра гидравлического цилиндра 43 стрелы. Значение сигнала 414 управления, при котором начинается перемещение, регистрируют как пороговое значение 402 сигнала опускания стрелы и хранят в компьютерной схеме 182. В соответствии с некоторыми вариантами настоящего изобретения регулируемый клапан 41 может быть предварительно откалиброван или может не требовать калибровки.
Третья категория сигналов и установочных параметров содержит группу установочных параметров 391 оператора, которые оператор задает время от времени, типично при помощи органов управления на пульте 52 управления оператора (см. фиг.5 и 6). Примеры этих установочных параметров 391 оператора показаны на фиг.12А. В качестве дополнительных примеров можно привести задание положения дроссельной заслонки 206 двигателя, регулировку 98 частоты вращения приспособления, уставку 185 автоматического врезания и задание сигнала 308 регулирования нагрузки в процентах. Сигнал 308 регулирования нагрузки преимущественно задают при помощи ручки 380 регулятора нагрузки, которая создает сигнал 0% при полном повороте против часовой стрелки, 100% при полном повороте по часовой стрелке и пропорциональные значения между этими предельными значениями. Дисплей 100 оператора и кнопки 102 навигации и выбора в меню позволяют видеть и редактировать различные установочные параметры в меню системы управления. Альтернативно, вместо дисплея 100 могут быть использованы сенсорный экран и/или компьютерная мышь. В соответствии с предпочтительным вариантом установочные параметры, которые можно редактировать с использованием дисплея 100, включают в себя уставку 303 управления предельной нагрузкой (об/мин), уставку 406 ограничителя скорости опускания стрелы в процентах, желательное положение 432 стрелы (или цилиндра стрелы) в процентах, нижнюю границу 462 относительного диапазона частот вращения привода приспособления и верхнюю границу 463 относительного диапазона частот вращения привода приспособления. Различные другие вспомогательные органы управления при необходимости также могут быть предусмотрены на пульте 52 управления оператора. Некоторые операторы и некоторые технологии проходки канав и врезания могут предусматривать использование одного или нескольких указанных параметров на постоянной основе. В соответствии с некоторыми вариантами некоторые из указанных параметров могут быть предварительно заданы при изготовлении системы управления и не могут быть изменены оператором.
Четвертая категория сигналов и установочных параметров содержит установочные параметры, которые оператор регулирует более часто или непрерывно, типично при помощи органов управления на пульте 52 управления оператора (см. фиг.5 и 6). В качестве примера можно привести переключатель 183 управления стрелой, позволяющий вручную задавать положение стрелы 47.
Пятая категория сигналов и установочных параметров содержит сигналы, которые индицируют измеренные физические параметры канавокопателя 30, или параметры окружающей среды, и/или реакцию канавокопателя 30 на воздействие системы управления и окружающей среды. В качестве примеров таких сигналов можно привести сигнал 312 частоты вращения двигателя (об/мин), вырабатываемый при помощи датчика 208 частоты вращения двигателя, сигнал 324 частоты вращения привода приспособления (об/мин), вырабатываемый при помощи датчика 186 частоты вращения привода приспособления, сигнал 323 гидростатического давления привода приспособления, сигнал 410 положения стрелы (или цилиндра стрелы) в процентах, и различные температуры системы и окружающей среды.
Шестая категория сигналов и установочных параметров содержит группу расчетных значений 392, вычисленных при помощи компьютерной схемы 182 системы управления для дальнейшего использования в системе управления. Примеры этих расчетных значений 392 показаны на фиг.12В. Они включают в себя множитель 317 нагрузки, нижнюю границу 310 относительного диапазона множителя нагрузки/ частоты вращения двигателя, верхнюю границу 311 относительного диапазона множителя нагрузки/ частоты вращения двигателя, расчетные значения множителя 417 приспособления, расчетные значения тока 442 опускания стрелы, предварительные значения тока 444 опускания стрелы, предварительные значения тока 445 подъема стрелы, значения тока 446 опускания стрелы при автоматическом врезании и значения тока 447 подъема стрелы при автоматическом врезании.
Седьмая категория сигналов и установочных параметров включает в себя сигналы, полученные при помощи системы управления и предназначенные для управления параметрами системы. Примеры этих сигналов включают в себя сигнал 414 управления клапаном для опускания стрелы, сигнал 415 управления клапаном для подъема стрелы и сигнал 322 управления насосом привода приспособления.
Ввод в систему управления описанных выше сигналов и установочных параметров может быть осуществлен оператором при помощи дискретного физического переключателя (например, за счет переключателя 185 режима автоматического врезания), может быть осуществлен оператором при помощи выбора значения непрерывного физического контроля (например, за счет выбора желательного положения стрелы 432) или может быть осуществлен оператором при помощи выбора дискретного или непрерывного параметра с использованием дисплея 100 оператора и кнопок 102 меню (например, за счет уставки 303 предельного значения регулятора нагрузки). Описанный выше способ ввода и изменения этих параметров может быть перераспределен между точками физического и виртуального ввода в систему управления, что не выходит за рамки настоящего изобретения.
Обратимся теперь к рассмотрению чертежей, чтобы облегчить более глубокое обсуждение, а более конкретно, обратимся к рассмотрению фиг.5-24, на которых показана система управления автоматическим врезанием и глубиной опускания стрелы, предназначенная для использования с гусеничным канавокопателем 30.
Как уже было указано выше, на фиг.5 и 6 показан один из вариантов пульта 52 управления оператора, имеющего множество точек физического и виртуального ввода, что позволяет оператору автоматически или вручную управлять различными функциями, связанными с врезанием и управлением глубиной стрелы.
На фиг.7-9 показан один вариант кинематической схемы и соединений стрелы 47, тягача 45 и гидравлического цилиндра 43 для приведения в действие стрелы, когда стрела 47 движется в своем диапазоне перемещения. На фиг.10 и 11 дополнительно показан гидравлический цилиндр 43 для приведения в действие стрелы, который имеет длину R во втянутом состоянии и длину R+E в выдвинутом состоянии. В соответствии с предпочтительным вариантом предусмотрен датчик 408 положения цилиндра стрелы, который связан с гидравлическим цилиндром 43 при помощи фитинга 409, так что любое выдвижение или втягивание штока 53 цилиндра вызывает соответствующее растяжение или сокращение датчика 408. В соответствии с предпочтительным вариантом датчик 408 представляет собой датчик Холла, который вырабатывает электрический сигнал, пропорциональный растяжению датчика 408.
На фиг.12 показан один вариант различных сигналов, передаваемых и получаемых компьютерной схемой, и их соединение с различными компонентами гусеничного канавокопателя 30. Кроме того, на фиг.12 показаны различные механические и гидравлические соединения между различными компонентами.
На фиг.13-15 показан изменяемый относительный диапазон 330, в котором зависимость между частотой 312 вращения двигателя и множителем 317 нагрузки является пропорциональной. Оператор может выбирать и позднее изменять местоположение относительного диапазона 330, за счет его сдвига 331 вправо (увеличения) или сдвига 332 влево (уменьшения), с использованием ручки 380 регулятора нагрузки. Как это показано на фиг.14, перемещение по часовой стрелке ручки 380 регулятора нагрузки вызывает сдвиг 331 вправо (увеличение) положения относительного диапазона 330. Наоборот, перемещение против часовой стрелке ручки 380 регулятора нагрузки вызывает сдвиг 332 влево (уменьшение) положения относительного диапазона, как это показано на фиг, 15. Специфическое положение ручки 380 регулятора нагрузки может быть выбрано в соответствии с предпочтениями оператора и/или в соответствии с текущими параметрами проходки канавы/ врезания. Относительный диапазон 330 и множитель 317 нагрузки, как это показано на фиг.13-15 и вычислено на фиг.18 и 19, имеют линейную пропорциональную зависимость. В соответствии с другими вариантами настоящего изобретения могут быть использованы другие нелинейные функциональные зависимости, в которых могут быть использованы другие элементы, такие как интегральные и производные члены.
На фиг.16 показан изменяемый относительный диапазон 460, в котором зависимость между частотой 324 вращения привода приспособления и множителем 417 приспособления является пропорциональной. Оператор может выбирать и позднее изменять местоположение верхней границы 463 относительного диапазона 460 за счет ее смещения 467 вправо или смещения 468 влево. Аналогичным образом, оператор может выбирать и позднее изменять местоположение нижней границы 462 относительного диапазона 460 за счет ее смещения 465 вправо или смещения 466 влево. Смещение 467 и 465 вправо и смещение 468 и 466 влево границ 463 и 462 может быть осуществлено при помощи дисплея 100 оператора и кнопок 102 навигации и выбора в меню на пульте 52 управления оператора. Относительный диапазон 460 и множитель 417 приспособления, как это показано на фиг.16 и вычислено на фиг.20, имеют линейную пропорциональную зависимость. В соответствии с другими вариантами настоящего изобретения могут быть использованы другие нелинейные функциональные зависимости, в которых могут быть использованы другие элементы, такие как элементы демпфирования.
На фиг.17 показана упрощенная блок-схема, иллюстрирующая зависимость между компьютерной схемой 182, регулируемым клапаном 41, гидравлическим цилиндром 43 стрелы, датчиком 408 положения цилиндра стрелы, насосом 55 для подачи рабочей жидкости и баком 57 для рабочей жидкости. Как уже было указано здесь выше, компьютерная схема 182 сравнивает действительное положение цилиндра 43 стрелы, отображаемое при помощи сигнала 410 положения цилиндра стрелы, с желательным положением 432 цилиндра стрелы (см. фиг. 12). Если желательно выдвинутое положение цилиндра 43 стрелы, сигнал 414 управления клапаном для опускания стрелы, вычисленный на фиг.18-24, передают на регулируемый клапан 41, что вызывает сдвиг катушки влево и побуждает питающий насос 55 нагнетать рабочую жидкость по гидравлической линии 59 в цилиндр 43. Это приводит к выдвижению штока 53 цилиндра и к возврату рабочей жидкости в бак 57 по гидравлической линии 61.
Если желательно втянутое положение цилиндра 43 стрелы, сигнал 415 управления клапаном для подъема стрелы, вычисленный на фиг.18-24, передают на регулируемый клапан 41, что вызывает сдвиг катушки вправо и побуждает питающий насос 55 нагнетать рабочую жидкость по гидравлической линии 61 в цилиндр 43. Это приводит к втягиванию штока 53 цилиндра и к возврату рабочей жидкости в бак 57 по гидравлической линии 59. Если желательно не изменять положение цилиндра 43 стрелы, то сигнал не подают на регулируемый клапан 41 и катушка остается расположенной по центру, блокируя гидравлические линии 59 и 61. При этом шток 53 цилиндра остается в прежнем положении. В соответствии с другими вариантами настоящего изобретения используют другую клапанную систему, имеющую другие детали, но обеспечивающую аналогичные результаты.
На фиг.18-24 описан вариант настоящего изобретения с использованием блок-схем, которые позволяют вычислять и изменять различные переменные системы управления, чтобы управлять положением стрелы 47 как в автоматическом, так и в ручном режимах. Следует иметь в виду, что могут быть использованы и другие алгоритмы, которые позволяют получить эквивалентные зависимости между различными переменными.
На фиг.18 показан способ, при помощи которого верхняя граница 311 и нижняя граница 310 относительного диапазона 330 могут быть вычислены и введены в память (запомнены). В операциях 602-608 этого способа вводят соответствующие входные данные, в том числе максимальную рабочую частоту 304 вращения двигателя в операции 602, ширину относительного диапазона 305 в операции 604, сигнал 303 управления предельной нагрузкой в операции 606 и сигнал 308 регулирования нагрузки в операции 608. Нижнюю границу 310 вычисляют, как это показано в операции 610, и вводят в память, а верхнюю границу 311 вычисляют, как это показано в операции 612, и вводят в память. Затем цикл вычисления повторяют.
На фиг. 19 показан способ, при помощи которого вычисляют и запоминают множитель 317 нагрузки. В операциях 620-626 этого способа вводят соответствующие входные данные, в том числе действительную частоту вращения двигателя 312 в операции 620, нижнюю границу 310 и верхнюю границу 311 относительного диапазона 330, соответственно в операции 622 и в операции 624, а также ширину 305 относительного диапазона в операции 626. Частоту вращения двигателя 312 проверяют в операции 628, и если находят, что она меньше чем нижняя граница 310 или равна ей, тогда множитель 317 нагрузки устанавливают на 0% в операции 630 и вводят в память. Если результат операции 628 отрицательный, тогда частоту вращения двигателя 312 проверяют в операции 632. Если находят, что частота вращения двигателя 312 находится между верхней границей 311 и нижней границей 310, тогда вычисляют множитель 317 нагрузки, как это показано в операции 634, и вводят в память. Если результат операции 632 отрицательный, тогда частоту вращения двигателя 312 проверяют в операции 636. Если находят, что частота вращения двигателя 312 превышает верхнюю границу 311 или равна ей, тогда множитель 317 нагрузки устанавливают на 100% в операции 638 и вводят в память. Если результат операции 636 отрицательный, тогда ошибку выхода из диапазона вырабатывают в операции 640. Цикл вычисления повторяют после запоминания множителя 317 нагрузки или после операции 640.
На фиг.20 показан способ, при помощи которого вычисляют и запоминают множитель 417 приспособления. В операциях 660-664 этого способа вводят соответствующие входные данные, в том числе частоту 324 вращения привода приспособления в операции 660, а также нижнюю границу 462 и верхнюю границу 463 относительного диапазона 460 частот вращения привода приспособления, соответственно в операции 662 и в операции 664. Частоту 324 вращения привода приспособления проверяют в операции 668, и если находят, что она меньше чем нижняя граница 462 или равна ей, тогда множитель 417 приспособления устанавливают на 0% в операции 670 и запоминают. Если результат операции 668 отрицательный, тогда частоту 324 вращения привода приспособления проверяют в операции 672. Если находят, что частота 324 вращения привода приспособления лежит в диапазоне между верхней границей 463 и нижней границей 462, тогда множитель 417 приспособления вычисляют, как это показано в операции 674, и запоминают. Если результат операции 672 отрицательный, тогда частоту 324 вращения привода приспособления проверяют в операции 676. Если находят, что частота 324 вращения привода приспособления превышает верхнюю границу 463 или равна ей, тогда множитель 417 приспособления устанавливают на 100% в операции 678 и запоминают. Если результат операции 676 отрицательный, тогда ошибку выхода из диапазона вырабатывают в операции 680. Цикл вычисления повторяют после запоминания множителя 417 приспособления или после операции 680.
В соответствии с некоторыми вариантами настоящего изобретения используют множитель 317 нагрузки и объединенный с ним изменяемый оператором относительный диапазон 330, которые показаны на фиг.13-15 и вычислены на фиг.18 и 19. Множитель 317 нагрузки, который обеспечивает обратную связь двигателя 36 с системой управления, используют для вычисления расчетного тока 442 опускания стрелы, как это показано на фиг.21. Кроме того, в соответствии с некоторыми вариантами настоящего изобретения используют множитель 417 приспособления и объединенный с ним изменяемый оператором относительный диапазон 460, которые показаны на фиг.16 и вычислены на фиг.20. Множитель 417 приспособления, который обеспечивает обратную связь частоты 324 вращения привода приспособления с системой управления, также используют для вычисления расчетного тока 442 опускания стрелы, как это показано на фиг.21. Расчетный ток 442 опускания стрелы дополнительно используют в качестве предварительного тока 444 опускания стрелы, если успешно прошли некоторые проверки, как это показано на фиг.22. Предварительный ток 444 опускания стрелы дополнительно используют в качестве тока 446 опускания стрелы при автоматическом врезании, если успешно прошли некоторые проверки, как это показано на фиг.23. Ток 446 опускания стрелы при автоматическом врезании дополнительно используют в качестве тока 414 опускания стрелы и направляют на регулируемый клапан 41, если успешно прошли некоторые проверки, как это показано на фиг.24.
Множитель 317 нагрузки и относительный диапазон 330 преимущественно позволяют непрерывно регулировать расчетный ток 442 опускания стрелы с учетом нагрузки двигателя. Это позволяет двигателю 36 непрерывно работать при высоких уровнях выходного сигнала, в результате чего может быть обеспечена высокая производительность гусеничного канавокопателя 30. Другими словами, если гусеничный канавокопатель 30 встречает уплотненный грунт, так что частота 312 вращения двигателя понижается во время операции врезания, тогда множитель 317 нагрузки уменьшают, что приводит к снижению расчетного тока 442 опускания стрелы. В том случае, когда расчетный ток 442 опускания стрелы также становится током 414 опускания стрелы (как это описано в предыдущих параграфах), тогда регулируемый клапан 41 снижает скорость погружения стрелы 47 и за счет этого несколько снижает нагрузку на двигатель 36 и позволяет повысить частоту 312 вращения двигателя. Наоборот, если гусеничный канавокопатель 30 встречает рыхлый грунт, так что частота 312 вращения двигателя возрастает, тогда множитель 317 нагрузки увеличивают. Это соответствующим образом приводит к повышению скорости погружения стрелы 47. За счет этого возрастает нагрузка на двигатель 36 и снижается частота 312 вращения двигателя. За счет надлежащего регулирования переменных системы управления можно поддерживать частоту 312 вращения двигателя в области высокого уровня выходного сигнала (high output) и автоматически и непрерывно регулировать скорость погружения стрелы 47 для этой цели.
Множитель 417 приспособления и относительный диапазон 460 преимущественно позволяют непрерывно регулировать расчетный ток 442 опускания стрелы с учетом частоты 324 вращения привода приспособления. Это позволяет непрерывно поддерживать частоту 324 вращения привода приспособления в непосредственной близости от заданной частоты. Другими словами, если гусеничный канавокопатель 30 встречает уплотненный грунт, так что частота 324 вращения привода приспособления понижается во время операции врезания, тогда множитель 417 приспособления уменьшают, что приводит к снижению расчетного тока 442 опускания стрелы. В том случае, когда расчетный ток 442 опускания стрелы также становится током 414 опускания стрелы (как это описано в предыдущих параграфах), тогда регулируемый клапан 41 снижает скорость погружения стрелы 47 и за счет этого несколько снижает нагрузку на двигатель 36 и позволяет повысить частоту 324 вращения привода приспособления. Наоборот, если гусеничный канавокопатель 30 встречает рыхлый грунт, так что частота 324 вращения привода приспособления увеличивается, тогда множитель 417 приспособления увеличивают, что соответствующим образом приводит к повышению скорости погружения стрелы 47. За счет этого возрастает нагрузка на двигатель 48 приспособления и снижается частота 324 вращения привода приспособления. За счет надлежащего регулирования переменных системы управления можно поддерживать частоту 324 вращения привода приспособления в желательной области и автоматически и непрерывно регулировать скорость погружения стрелы 47 для этой цели.
Возможность регулировки оператором относительного диапазона 330 за счет поворота ручки 380 регулятора нагрузки преимущественно позволяет оператору осуществлять регулировку гусеничного канавокопателя 30 в соответствии с данными условиями окружающей среды или с желательными рабочими характеристиками. Изменение приложенной к двигателю 36 нагрузки за счет различного использования имеющейся мощности и крутящего момента позволяет изменять и регулировать результаты проходки канавы. Аналогичным образом, возможность регулировки оператором относительного диапазона 460 частот вращения (привода) приспособления преимущественно позволяет оператору осуществлять дополнительную регулировку гусеничного канавокопателя 30. Изменение нагрузки, приложенной к двигателю 48 приспособления, позволяет изменять и регулировать результаты проходки канавы,
Обратимся теперь к рассмотрению фиг.21, на которой показан способ вычисления и запоминания расчетного тока 442 опускания стрелы. В этом способе используют множитель 417 приспособления и множитель 317 нагрузки для создания обратной связи, как уже было указано здесь выше. Входные данные для этого способа, которые выбирают в операциях 700-708, включают в себя максимальный ток 416 стрелы, выбираемый в операции 700, сигнал 406 ограничителя скорости падения стрелы, выбираемый в операции 702, множитель 417 приспособления, выбираемый в операции 704, множитель 317 нагрузки, выбираемый в операции 706, и пороговый ток 402 стрелы, выбираемый в операции 708. В операции 710 вычисляют расчетный ток 442 опускания стрелы и вводят его в память. После этого цикл вычисления повторяют.
На фиг.22 показан способ, при помощи которого вычисляют предварительный ток 444 опускания стрелы и предварительный ток 445 подъема стрелы и вводят их в память. Этот способ позволяет системе управления автоматически регулировать положение стрелы, чтобы устанавливать и поддерживать желательное положение 432 цилиндра стрелы. Входные данные для этого способа, которые выбирают в операциях 720-726, включают в себя максимальный ток 416 стрелы, определяемый в операции 720, расчетный ток 442 опускания стрелы, выбираемый в операции 722, желательное положение 432 цилиндра стрелы, выбираемое в операции 724, и фактическое положение 410 цилиндра стрелы, определяемое в операции 726. Действительное положение 410 цилиндра стрелы проверяют в операции 728, и если находят, что оно меньше чем желательное положение 432 цилиндра стрелы, тогда предварительный ток 444 опускания стрелы устанавливают равным расчетному току 442 опускания стрелы в операции 730 и вводят в память, а предварительный ток 445 подъема стрелы устанавливают равным нулю в операции 732 и вводят в память. Если результат операции 728 отрицательный, тогда проверяют действительное положение 410 цилиндра стрелы в операции 734, и если находят, что оно равно желательному положению 432 цилиндра стрелы, тогда предварительный ток 444 опускания стрелы устанавливают равным нулю в операции 736 и вводят в память, а предварительный ток 445 подъема стрелы устанавливают равным нулю в операции 738 и вводят в память. Если результат операции 734 отрицательный, тогда действительное положение 410 цилиндра стрелы проверяют в операции 740 и если находят, что оно больше чем желательное положение 432 цилиндра стрелы, тогда предварительный ток 444 опускания стрелы устанавливают равным нулю в операции 742 и вводят в память, а предварительный ток 445 подъема стрелы устанавливают равным максимальному току 416 (подъема) стрелы в операции 744 и вводят в память. Если результат операции 740 отрицательный, тогда вырабатывают ошибку выхода из диапазона в операции 746. Цикл вычислений повторяют после запоминания предварительного тока 444 опускания стрелы и предварительного тока 445 подъема стрелы или после операции 746. В этом способе может быть предусмотрено использование известных технологий управления, таких как создание зоны нечувствительности в операциях 728 734 и 740. В этом способе также может быть предусмотрено использование известных таких технологий управления, как создание контура пропорционально-интегрально-дифференциального (ПИД) регулирования, чтобы добиться желательного положения 432 цилиндра стрелы.
На фиг.23 показан способ, при помощи которого ток 446 опускания (стрелы) при автоматическом врезании и ток 447 подъема (стрелы) при автоматическом врезании могут быть вычислены и запомнены. Этот способ позволяет системе управления автоматически прерывать процесс врезания и/или проходки канавы и поднимать стрелу 47, когда блокирован привод приспособления, и возобновлять указанный процесс после снятия блокировки. Входные данные для этого способа, которые выбирают в операциях 760-766, включают в себя максимальный ток 416 стрелы, определяемый в операции 760, предварительный ток 444 опускания стрелы, определяемый в операции 762, предварительный ток 445 подъема стрелы, определяемый в операции 764, и частоту 324 вращения привода приспособления, определяемую в операции 766. Частоту 324 вращения привода приспособления проверяют в операции 768, и если находят, что она равна нулю, то тогда ток 446 опускания при автоматическом врезании устанавливают равным нулю в операции 770 и запоминают, а ток 447 подъема при автоматическом врезании устанавливают равным максимальному току 416 стрелы в операции 772 и запоминают. Если результат операции 768 отрицательный, тогда ток 446 опускания при автоматическом врезании устанавливают равным предварительному току 444 опускания стрелы в операции 774 и запоминают, а ток 447 подъема при автоматическом врезании устанавливают равным предварительному току 445 подъема стрелы в операции 776 и запоминают. После этого цикл вычислений повторяют. В этом способе может быть предусмотрено использование известных технологий управления, таких как создание зоны нечувствительности в операции 768.
На фиг.24 показан способ, при помощи которого ток 414 опускания стрелы и ток 415 подъема стрелы могут быть вычислены и запомнены. Этот способ позволяет производить автоматическое врезание и автоматический выбор глубины стрелы. Этот способ также позволяет системе управления прерывать функции автоматического врезания и автоматического выбора глубины стрелы, когда оператор включает ручное управление 183 стрелой или переходит на ручное управление стрелой. Более того, этот способ позволяет использовать функции ручного управления 183 стрелой при отключенных функциях автоматического врезания и автоматического выбора глубины стрелы. Входные данные для этого способа, которые выбирают в операциях 800-808, включают в себя максимальный ток 416 стрелы, определяемый в операции 800, положение 185 переключателя автоматического врезания, определяемое в операции 802, положение 183 переключателя ручного управления стрелой, определяемое в операции 804, ток 446 опускания при автоматическом врезании, определяемый в операции 806, и ток 447 подъема при автоматическом врезании, определяемый в операции 808. Положение 183 переключателя ручного управления стрелой проверяют в операции 810, и если находят, что переключатель находится в положении "UP" (вверх), тогда ток 414 опускания стрелы устанавливают равным нулю в операции 812 и запоминают, а ток 415 подъема стрелы устанавливают равным максимальному току 416 стрелы в операции 814 и запоминают. Если результат операции 810 отрицательный, тогда положение 183 переключателя ручного управления стрелой проверяют в операции 816, и если находят, что переключатель находится в положении "DOWN" (вниз), тогда ток 414 опускания стрелы устанавливают равным максимальному току 416 стрелы в операции 818 и запоминают, а ток 415 подъема стрелы устанавливают равным нулю в операции 820 и запоминают. Если результат операции 816 отрицательный, тогда положение 183 переключателя ручного управления стрелой проверяют в операции 822, и если находят, что переключатель находится в положении "OFF" (выключен), тогда положение 185 переключателя автоматического врезания проверяют в операции 824, и если находят, что переключатель находится в положении "ON" (включен), тогда ток 414 опускания стрелы устанавливают равным току 446 опускания при автоматическом врезании в операции 826 и запоминают, а ток 415 подъема стрелы устанавливают равным току 447 подъема при автоматическом врезании в операции 828 и запоминают. Если результат операции 824 отрицательный, тогда положение 185 переключателя автоматического врезания проверяют в операции 830, и если находят, что переключатель находится в положении "OFF" (выключен), тогда ток 414 опускания стрелы устанавливают равным нулю в операции 832 и запоминают, а ток 415 подъема стрелы устанавливают равным нулю в операции 834 и запоминают. Если результат операции 830 отрицательный, тогда в операции 836 вырабатывают ошибку выхода из диапазона. Если результат операции 822 отрицательный, тогда в операции 838 вырабатывают ошибку выхода из диапазона. Цикл вычислений повторяют после того, как запоминают ток 414 опускания стрелы и ток 415 подъема стрелы, или после операции 836 или 838.
Компьютерная схема 182, раскрытая в описании настоящего изобретения, может содержать одно или несколько вычислительных устройств. Эти вычислительные устройства могут быть физически распределены по объему гусеничного канавокопателя 30 и могут быть встроены в некоторые компоненты гусеничного канавокопателя 30; например, система управления двигателем 36 может иметь вычислительное устройство, которое входит в компьютерную схему 182. Могут быть использованы различные вычислительные устройства, в том числе контроллер и компьютер. Вычислительные устройства могут быть цифровыми или аналоговыми и могут быть программируемыми при помощи программного обеспечения.
В некоторых случаях, в приведенном выше описании указаны специфические единицы измерения для специфических переменных, например, об/мин. Следует иметь в виду, что в каждом таком случае может быть использована и другая система единиц изменения. Кроме того, предусматривается, что при необходимости может быть использована преобразованная система единиц изменения; например, желательное положение цилиндра стрелы в процентах может быть преобразовано в желательное положение цилиндра стрелы в градусах.
Некоторые сигналы, которые описаны выше со ссылкой на чертежи, описаны как сигналы специфического типа, имеющие специфические единицы измерения. Например, указано, что сигнал 308 регулятора нагрузки имеет диапазон от 0% до 100%, а сигналы 414 и 415 регулируемого клапаны даны в мА электрического тока. Однако следует иметь в виду, что в этих и других случаях могут быть использованы различные другие типы сигналов и единиц измерения, что не выходит за рамки настоящего изобретения; например, сигнал 308 регулятора нагрузки может быть заменен сигналом широтно-импульсной модуляции (ШИМ). Аналогично, эти сигналы также могут быть преобразованы в сигналы другого типа внутри самой системы управления, например, сигналы 414 и 415 регулируемого клапаны в компьютерной схеме 182 первоначально могут быть цифровыми сигналами и затем могут быть преобразованы в аналоговые сигналы (мВ). Эти преобразования могут быть осуществлены в различных местоположениях, в том числе в устройстве, которое вырабатывает сигнал, в преобразователе сигнала, в контроллере и/или в компьютерной схеме 182.
В приведенном описании изобретения изложены варианты настоящего изобретения, имеющие различные контуры управления с обратной связью. Известны различные способы управления с обратной связью, в том числе такие, которые позволяют вычислять ошибки, корректировать усиление, вычислять время линейного нарастания сигнала, вычислять задержки, усреднять данные, определять гистерезис, осуществлять пропорционально-интегрально-дифференциальное регулирование и осуществлять другие математические операции с обратной связью. Следует иметь в виду, что некоторые из этих способов могут быть объединены и введены в описанные здесь выше варианты.
В приведенном описании изобретения изложены варианты настоящего изобретения, в которых обратную связь от двигателя 36 и от частоты 324 вращения привода приспособления используют для регулирования скорости перемещения стрелы 47. В других вариантах настоящего изобретения для этого также используют обратную связь от других параметров, например, от давления 323 привода приспособления.
Следует иметь в виду, что уже известны электрические и механические исполнительные механизмы. Более того, двигатель может подавать энергию на электрический и/или механический исполнительный механизм, а исполнительный механизм может быть оперативно связан со стрелой, при этом описанная система управления может быть приспособлена для управления таким исполнительным механизмом. Следует иметь в виду, что такой исполнительный механизм в приведенном здесь выше описании заменен гидравлическим цилиндром 43, регулируемым клапаном 41 и питающим насосом 55.
Приведенное выше описание, примеры и данные дают полное представление об изготовлении и использовании настоящего изобретения. Несмотря на то что были описаны различные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной далее формулы изобретения.
Реферат
Изобретение относится к системе управления землеройной техникой. Техническим результатом является повышение производительности землеройной машины при различных условиях эксплуатации за счет обеспечения возможности ее приспосабливания к изменяющимся условиям. Система управления исполнительным механизмом погружения приспособления для экскавации имеет привод и контроллер, вырабатывающий выходной сигнал для изменения скорости погружения исполнительного механизма. При этом контроллер выполнен с возможностью определять полосу частот вращения привода, в которой величина выходного сигнала исполнительного механизма увеличивается при повышении частоты вращения привода и, наоборот, уменьшается при уменьшении частоты вращения привода. Кроме того, система содержит интерфейс пользователя, позволяющий оператору вручную изменять полосу частот вращения привода. 10 з.п. ф-лы, 28 ил.
Комментарии