Способ профилирования дороги автогрейдером - RU2707614C1
Код документа: RU2707614C1
Чертежи
Описание
Изобретение относится к способу возведения дорожного полотна и может быть использовано при строительстве дорог.
Наиболее близким к заявленному способу по совокупности признаков является способ профилирования дорожного полотна автогрейдером, предусматривающей обеспечение требуемой поверхности полотна, заданной его цифровым проектом, путем регулирования положения средней точки режущей кромки и угла поперечного перекоса рабочего органа автогрейдера, а так же регулирования направления и скорости движения автогрейдера. Один из двух контуров гидропривода рабочего органа замкнут по углу βPO поперечного перекоса рабочего органа, а второй контур этого гидропривода и два контура ходового устройства автогрейдера замкнуты, соответственно, по координатам ZPO, ХРО, YPO рабочего органа, измеряемым комплектом датчиков спутниковой навигационной системы /Сокращение сроков земляных работ. URL: http://www.agpmeridian.ru/image_content/preesntation_2013/Kolcov.pdf (дата обращения: 21.03.2018 г.)/. Этот способ принят за прототип.
К причинам препятствующим достижению указанного ниже технического результата при использовании известного способа, относят то, что известный способ не обеспечивает высокой точности профилируемого полотна.
Сущность изобретения заключается в автоматизации процесса профилирования дорожного полотна автогрейдером.
Технический результат изобретения заключается в повышении точности геометрических параметров возводимого полотна, а также в снижении себестоимости строительства дорожного полотна.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе профилирования дорожного полотна автогрейдером с ходовым, рулевым устройствами и гидроприводами подъема-опускания и перекоса рабочего органа, включающем в себя формирование, в соответствии с цифровым проектом дорожного полотна, выполненного в виде совокупности плановых координат X, Y и высот Z, и принятой схемой движения автогрейдера, вектора

Для достижения более высокой точности геометрических параметров возводимого дорожного полотна, необходимо уменьшить погрешность сигнала ZOC обратной связи в системе автоматического управления положением рабочего органа по координате ZPO, путем дополнительного периодического измерения координаты ZPO одним или несколькими альтернативными датчиками и последующего формирования корректирующего сигнала ZK и использования его при вычислении сигнала обратной связи. Заявленное изобретение позволяет значительно повысить точность геометрических параметров возводимого дорожного полотна при профилировании его автогрейдером за счет повышения точности системы автоматического управления положением по координате ZPO рабочего органа автогрейдера путем дополнительной коррекции сигнала обратной связи этой системы управления, для чего осуществляется дополнительное периодическое измерение положения рабочего органа по координате ZPO с помощью одного или нескольких альтернативных датчиков, которые устанавливаются в зоне работы автогрейдера.
Блок датчиков альтернативного периодического измерения располагают на штанге, закрепленной на рабочем органе, а элементы, формирующие альтернативную плоскость, - например, на струнах, натянутых между опорами, установленными, по крайней мере, на одной из границ профилирования дорожного полотна, определяемых технологией производства работ, на высоте, обеспечивающей безопасное проведение работ.
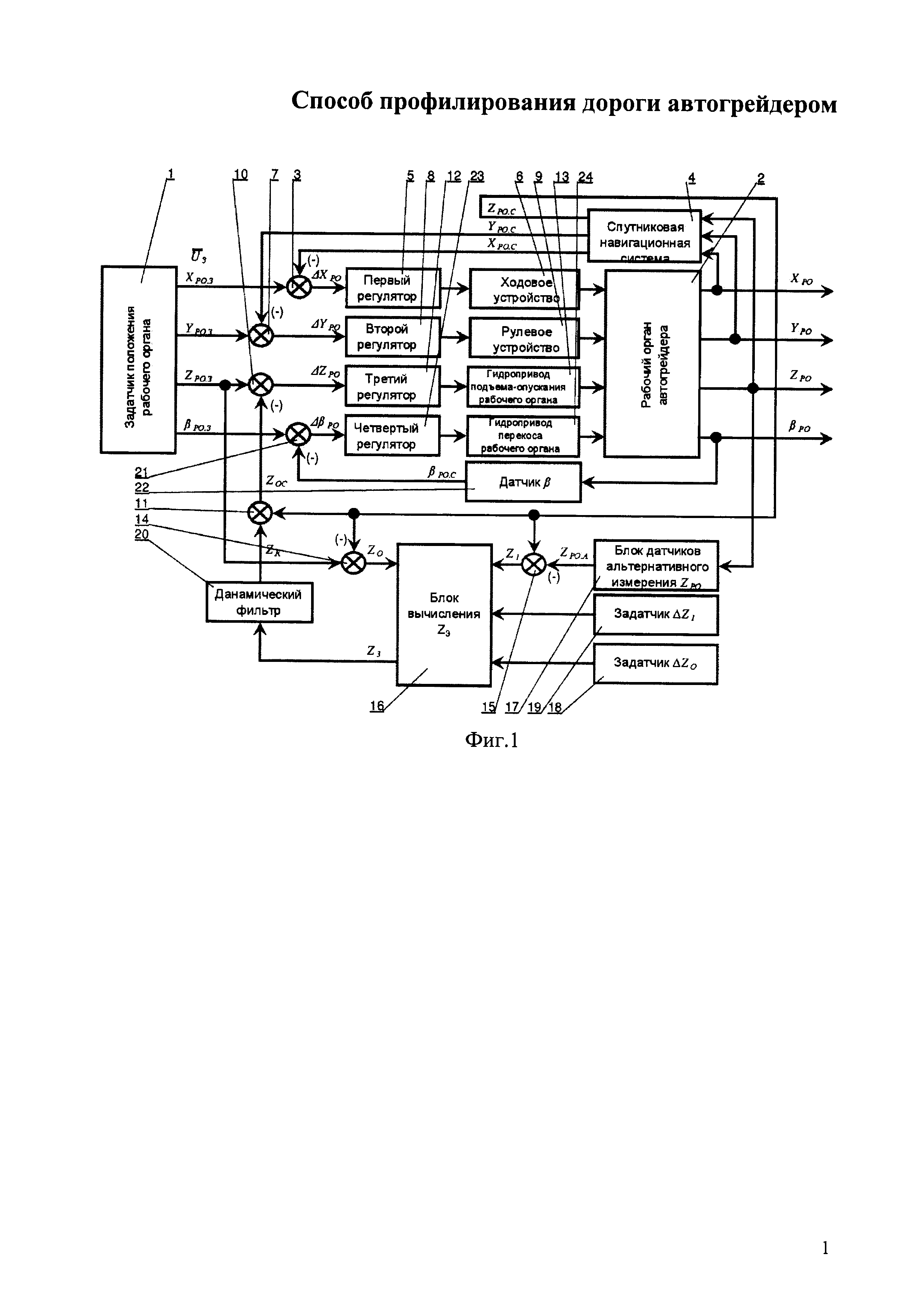
На фиг. 1 изображена структурная схема автоматического профилирования дороги автогрейдером, где приняты следующие обозначения: задатчик положения рабочего органа 1, рабочий орган автогрейдера 2, первое устройство сравнения 3, спутниковая навигационная система 4, первый регулятор 5, ходовое устройство 6, второе устройства сравнения 7, второй регулятор 8, рулевое устройство 9, третье устройство сравнения 10, арифметическое устройство 11, третий регулятор 12, гидропривод подъема-опускания рабочего органа 13, четвертое устройство сравнения 14, пятое устройство сравнения 15, блок вычисления Z3 16, блок датчиков альтернативного измерения ZPO 17, задатчик ΔZO 18, задатчик ΔZ1 19, динамический фильтр 20, шестое устройство сравнения 21, датчик β 22, четвертый регулятор 23, гидропривод перекоса рабочего органа 24.
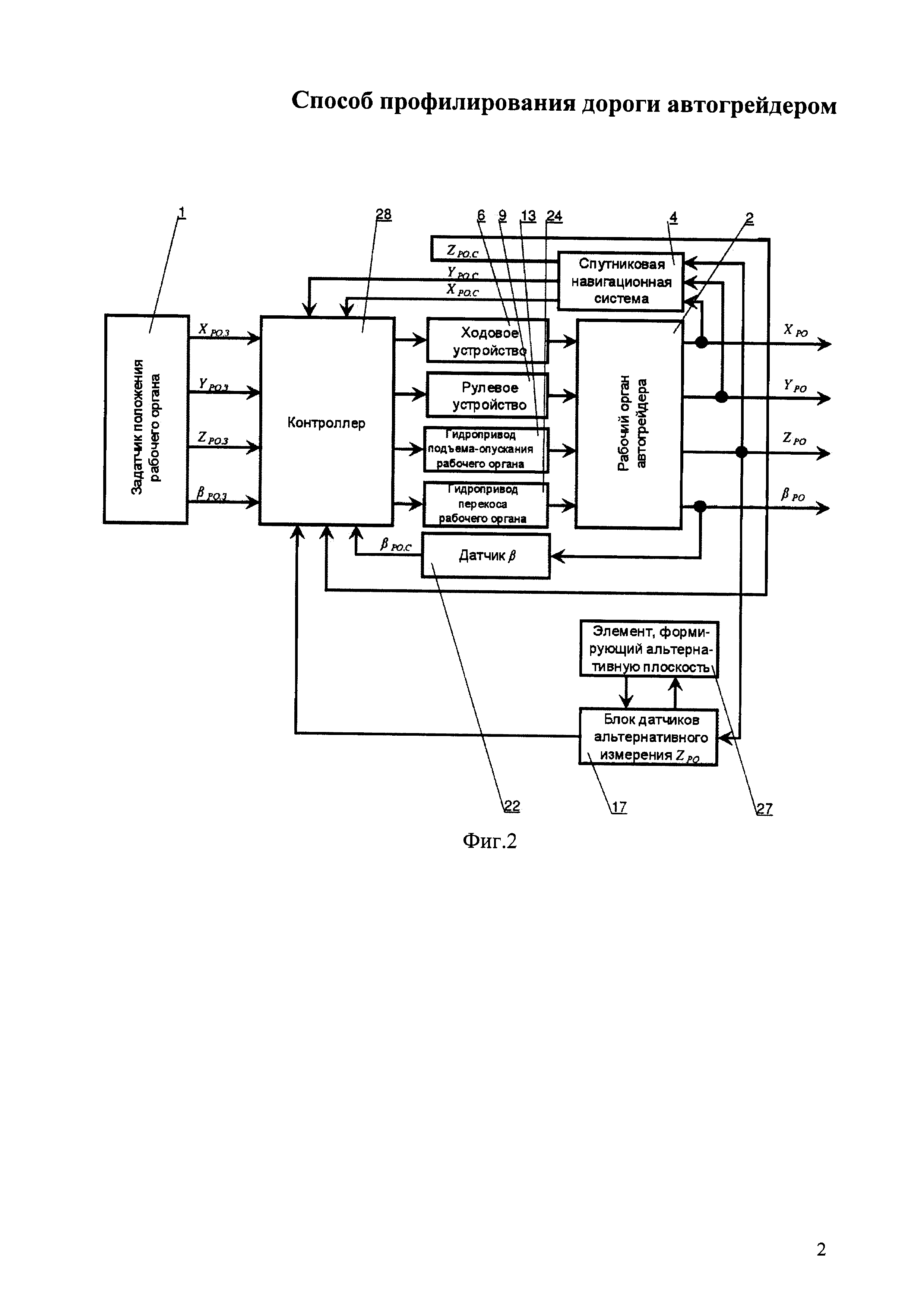
На фиг. 2 изображена упрощенная структурная схема автоматического профилирования дороги автогрейдером, где приняты следующие обозначения: задатчик положения рабочего органа 1, рабочий орган автогрейдера 2, спутниковая навигационная система 4, ходовое устройство 6, рулевое устройство 9, гидропривод подъема-опускания рабочего органа 13, блок датчиков альтернативного измерения ZPO 17, датчик β 22, гидропривод перекоса рабочего органа 24, элемент, формирующий альтернативную плоскость 27, контроллер 28.
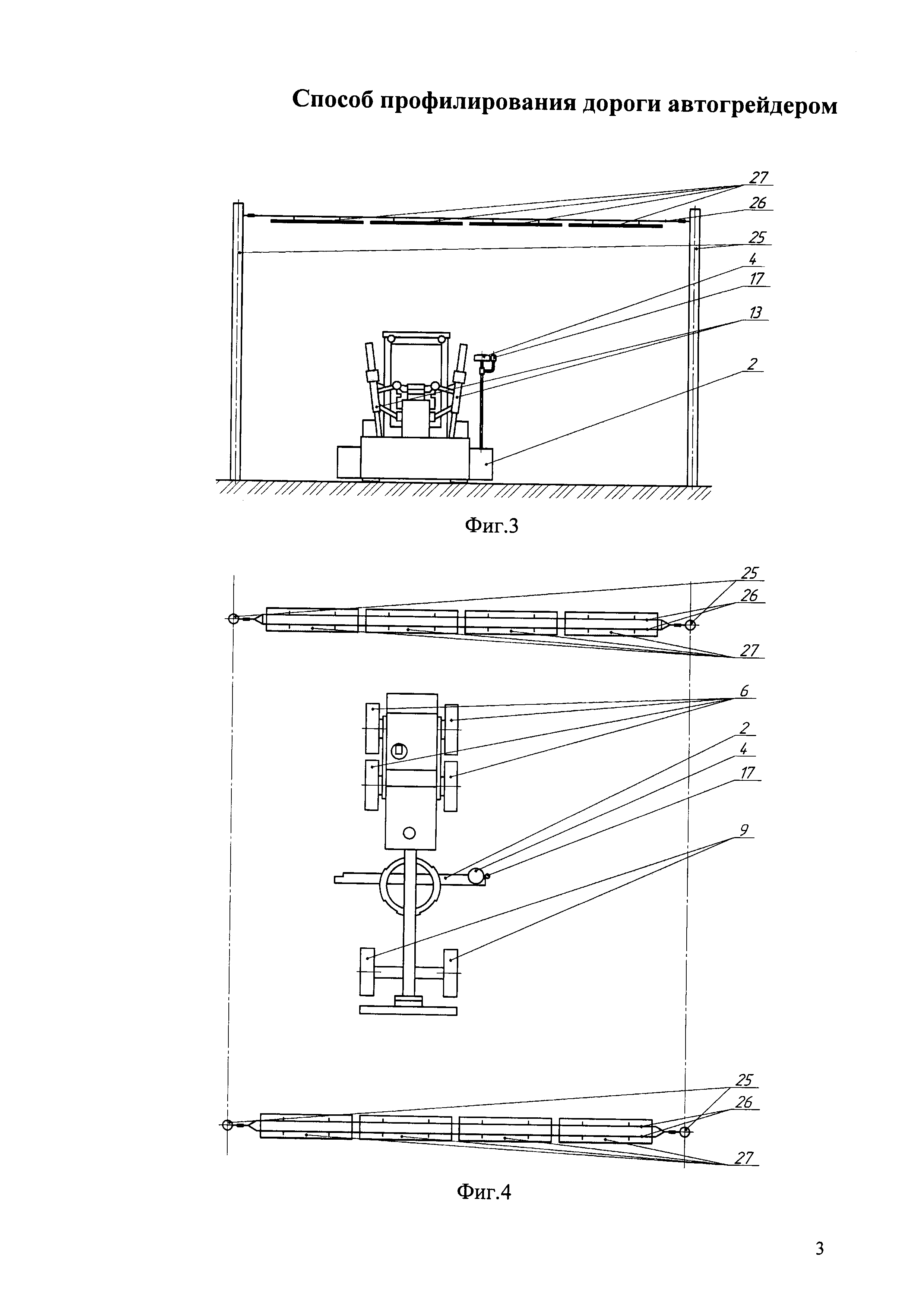
На фиг. 3 изображен один из возможных вариантов расположения датчиков дополнительного периодического альтернативного измерения координаты ZPO рабочего органа автогрейдера (вид спереди), здесь приняты следующие обозначения: базовая система координат ОБZБ ХБ XБ дорожного полотна, рабочий орган автогрейдера 2, спутниковая навигационная система 4, гидропривод подъема-опускания рабочего органа 13, блок датчиков альтернативного измерения ZPO 17 альтернативного периодического измерения координаты ZPO, опора 25, струна 26, элемент, формирующий альтернативную плоскость 27.
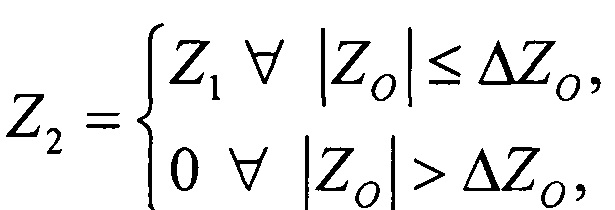
На фиг. 4 изображен один из возможных вариантов расположения датчиков дополнительного периодического альтернативного измерения координаты ZPO рабочего органа автогрейдера (вид сверху), здесь приняты следующие обозначения: базовая система координат ОБ ZБ ХБ YБ дорожного полотна, рабочий орган автогрейдера 2, спутниковая навигационная система 4, ходовое устройство 6, рулевое устройство 9, блок датчиков альтернативного измерения ZPO 17 альтернативного периодического измерения координаты ZPO, опора 25, струна 26, элемент, формирующий альтернативную плоскость 27.
Примем для компактности описания следующие оси базовой системы координат: ось, направленную на восток обозначим буквой X; ось, направленную на север обозначим буквой Y; ось, направленную вертикально вверх обозначим буквой Z. Угол перекоса рабочего органа обозначим буквой β. Индексы букв X, Y, Z, β обозначают функциональное назначение сигналов либо перемещений по осуществляемым соответствующим осям или углу.
Для осуществления способа профилирования дорожного полотна используют устройств которое состоит из автогрейдера, оснащенного ходовым устройством 6, рулевым устройством 9 и гидроприводом подъема-опускания рабочего органа 13 и гидроприводом перекоса рабочего органа 24, комплектом датчиков спутниковой навигационной системы 4, которая измеряет положение средней точки режущей кромки рабочего органа ХРО, YPO, ZPO в базовой системе координат Об Хб Yб Zб и формирует сигналы обратной связи ХОС.С, YOC.С, ZOC.С, используемые в системах управления. Корме того на автогрейдере установлен датчик β 22 измерения угла перекоса рабочего органа βPO. Задатчик положения рабочего органа 1 с четырьмя выходными координатами ХРО.З, YPO.З, ZPO.З, βРО.З, значения которых определяются цифровым проектом дорожного полотна, создаваемого в базовой системе координат Об Хб Yб Zб, и принятой схемой движения автогрейдера. Для управления автогрейдером имеются четыре устройства сравнения, четыре регулятора для управления ходовым устройством 6, рулевым устройством 9 и гидроприводом подъема-опускания рабочего органа 13 и гидроприводом перекоса рабочего органа 24. Автогрейдер дополнительно снабжен блоком датчиков альтернативного периодического измерения координаты ZPO - блоком датчиков альтернативного измерения ZPO 17, который формирует сигнал ZPO.A. Формирование этого сигнала происходит за счет того, что вдоль рабочей площадки установлены опоры 25 между которыми натянуты струны 26 на которых, в свою очередь, закреплены элементы, формирующие альтернативную плоскость 27. На автогрейдере имеется пятое устройство сравнения 15 для определения разностного сигнала обратной связи по оси, направленной вертикально вверх Z1=ZPO.С-ZPO.А, шестое устройство сравнения 14 для определения разностного сигнала системы управления по оси, направленной вертикально вверх ZO=ZPO.З-ZPO.С, задатчик ΔZ1 19 и задатчик ΔZ0 18 - задатчики для задания допустимого значения разностного сигнала обратной связи по оси, направленной вертикально вверх ΔZ1 и допустимого значения разностного сигнала системы управления по оси, направленной вертикально вверх ΔZO. Эти сигналы поступают в блок вычисления сигнала обобщенной обратной связи Z3 (блок вычисления Z3 16) по уравнениям
Работа автогрейдера происходит следующим образом.
В соответствии с технологическим заданием профилирования дороги автогрейдером с требуемыми значениями точности геометрических параметров по координатам X, Y и Z, заданных проектом дорожного полотна и принятой схемой движения автогрейдера, формируется с помощью блока задатчика положения рабочего органа 1 вектор
Требуемое значение координаты ZPO.З, сформированное в блоке задатчика положения рабочего органа 1, сравнивается в третьем устройстве сравнения 10 сигналом ZOC, вычисленным в арифметическом устройстве 11, далее вычисленное значение ΔZPO-ZPO.З-ZPO.Споступает на третий регулятор 12 координаты ZPO, с которого сигнал подается на гидропривод подъема-опускания рабочего органа 13 автогрейдера, в результате чего обеспечивается автоматическое управление положением ZPO средней точки режущей кромки.
Сигнал ZPO.С о положении рабочего органа, измеряемый спутниковой навигационной системой 4, приемник которой закреплен на автогрейдере, подается на первый вход арифметического устройства 11, на инверсный вход четвертого устройства сравнения 14 и на прямой вход пятого устройство сравнения 15. На прямой вход четвертого устройства сравнения подается требуемое значение координаты ZPO.З, сформированное в задатчике положения рабочего органа 1, затем вычисленный в этом устройстве сравнения сигнал ZO=ZPO.З-ZPO.С подается на первый вход блока вычисления Z3 16. На инверсный вход пятого устройства сравнения 15 подается сигнал ZPO.А с выхода блока датчиков альтернативного измерения ZPO 17 положения рабочего органа. Далее сигнал Z1 с выхода пятого устройство сравнения 15 подается на второй вход блока вычисления Z3 16, на третий вход этого блока вычисления ZЗ поступает сигнал с задатчика ΔZO 18, а на четвертый вход блока вычисления Z3 16 подается сигнал с задатчика ΔZ1 19. Выходной сигнал Z3 блока вычисления Z3 16 вычисляется по формулам:
Требуемое значение угла βРО.Зпоперечного перекоса рабочего органа, сформированное в блоке задатчика положения рабочего органа 1, сравнивается в шестом устройстве сравнения 21 с сигналом обратной связи βРО.С, измеряемым датчик β 22. Далее сигнал ΔβРО=βРО.З-βРО.С, вычисленный в этом устройстве сравнения, поступает на вход четвертого регулятора 23, с которого сигнал подается на вход гидропривода перекоса рабочего органа 24, в результате чего обеспечивается автоматическое управление поперечного перекоса рабочего органа по углу βРО.
При осуществлении изобретения блок задатчика положения рабочего органа 1, третье устройство сравнения 10, четвертое устройство сравнения 14, пятое устройство сравнения 15, шестое устройство сравнения 21, арифметическое устройство 11, задатчик ΔZO 18, задатчик ΔZ1 19, блок вычисления Z3 16, динамический фильтр 20, третий регулятор 12, четвертый регулятор 23 могут быть реализованы, например, на универсальном программируемом контроллере SIMATIC S7-300 /Simatic. Комплекты для комплексной автоматизации. Каталог ST70-2105. Каталог продукции SIEMENS, СПБ:, 2005/. В качестве спутниковой навигационной системы может быть использована, например, система TOPSON 3D ГНСС /Система TOPSON 3D ГНСС для автогрейдеров www.gsi.ru/art.php?id=600.
Первый регулятора 5 и второй регулятора 8 может заменить, например, машинист автогрейдера, который, наблюдая на мониторе программируемого контроллера, например, SIMATIC S7-300, значения ΔХРО и ΔYPO, формирует воздействия на ходовое и рулевое устройства автогрейдера с помощью, например, джойстика.
В качестве блока датчиков альтернативного измерения ZPO 17 может быть применен, например, ультразвуковой датчик, расположенный на автогрейдере в точке, координату ZPO которой измеряют спутниковая навигационная система, и несколько элементов, формирующих альтернативную плоскость 27, каждый из которых закреплен выше автогрейдера на струнах 26 опор 25, расположенных вдоль трассы рабочей зоны автогрейдера. Опоры 25 закреплены в реперных точках строящегося дорожного полотна. Точность измерения координаты ZPO ультразвуковым датчиком, например, ультразвуковой дальномер типа: SKILL 0520 или КРАТОН ДУ-01 / Промышленные ультразвуковые дальномеры https://market.yandex.ru (дата обращения: 21.03.2018 г.)./ составляет ±3 мм при диапазоне измерения 0.6-15 м, что существенно превышает точность измерения по координате Z спутниковой навигационной системы, поэтому сигнал ZPO.А выхода блока датчиков альтернативного измерения ZPO 17 используется для формирования корректирующего сигнала ZK, используемого в цепи обратной связи системы автоматического управления положения рабочего органа по координате ZPO.
В качестве динамического фильтра 20, необходимость которого обусловлена исключением скачкообразного изменения сигнала ZK и тем самым предотвращением резкого изменения положения рабочего органа по координате ZPO, используется, например, апериодическое звено. Использования сигналов ΔZO и ΔZ1, формируемых задатчиком ΔZO 18 и задатчиком ΔZ1 19, в блоке вычисления Z3 16 вычисления ZЗ необходимо для исключения ложного срабатывания процесса формирования сигнала ZK.
При профилировании дороги автогрейдером, оснащенным спутниковой навигационной системой, имеет место существенная нестационарность значений выходных сигналов этой системы, измеряющей координаты ХРО, YPO, ZPO средней точки режущей кромки рабочего органа. Наиболее существенно это проявляется по координате ZPO, где погрешность измерения составляет 20-50 мм. Этот фактор не позволяет обеспечить профилирование дороги с требуемой точностью геометрических параметров. Путем применения многомерной системы автоматического управления профилирования дороги автогрейдером, оснащенным спутниковой навигационной системой, блоком датчиков альтернативного периодического измерения координаты ZPO рабочего органа, блока вычисления сигнала ZK и динамического фильтра, с помощью которых выполняется коррекция сигнала обратной связи в системе управления положением рабочего органа по координате ZPO становится возможным обеспечить требуемые показатели точности геометрических параметров дорожного полотна при минимальном расходе энергоресурсов.
Заявленный способ профилирования дороги позволяет автоматически обеспечить требуемое значение точности геометрических параметров дорожного полотна в процессе его профилирования при нестационарности значения координаты ZPO.С, измеряемой спутниковой навигационной системой. Поскольку точность измерения этой координаты комплектом датчиков спутниковой навигационной системы соответствует 20-30 мм и может достигать, как показали экспериментальные исследования, выполненные с участием авторов настоящей заявки на изобретение, 40-50 мм, что делает невозможным получение дорожного полотна с минимальными отклонениями от проекта, составляющими 2-3 мм.
С применением заявленного способа стабилизируется процесс профилирования дороги, в результате чего повышается ее качество.
Реферат
Изобретение относится к профилированию дорожного полотна автогрейдером. Техническим результатом является повышение точности геометрических параметров возводимого полотна. Способ профилирования дорожного полотна включает формирование вектора, задающих сигналов многомерной системы управления положением Х, Y, Zсредней точки режущей кромки и углом βпоперечного перекоса рабочего органа автогрейдера в базовой системе координат ОХYZ, измерение координат X, Y, Zкомплектом датчиков спутниковой навигационной системы, измерение угла βдатчиком угла, расположенным на автогрейдере, определение отклонений положения рабочего органа по координатам Х, Y, Z, βотносительно заданного вектора, управление положением рабочего органа в функции этих отклонений с помощью ходового и рулевого устройств автогрейдера и гидроприводов подъема-опускания и перекоса рабочего органа, периодическое измерение координаты Zодним или несколькими альтернативными датчиками, вычисление по разработанному алгоритму сигнала Zкоррекции, который используют в системе управления положением рабочего органа по координате Z. 4 ил.
Формула

Документы, цитированные в отчёте о поиске
Метод для оценки ориентации, аппаратура и компьютерный программоноситель
Комментарии