Система управления для силовой установки и для двигателя внутреннего сгорания - RU2406851C2
Код документа: RU2406851C2
Чертежи































Описание
Текст описания приведен в факсимильном виде.




















































































Реферат
Изобретение относится к двигателестроению, в частности к системам управления для силовой установки и двигателя внутреннего сгорания. Технический результат - система управления для силовой установки и двигателя внутреннего сгорания обеспечивает возможность повышения управляемости и точности управления в случае регулирования множества управляющих величин при одновременном устранении взаимосвязи, существующей между множеством входных сигналов управления и управляющих величин. Система управления для силовой установки, в которой между множеством входных сигналов управления и множеством управляющих величин существует взаимосвязь, содержит средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки в виде модели системы с дискретным временем. Определенный алгоритм управления включает в себя комбинацию определенного алгоритма управления с назначением отклика и определенного алгоритма автономного управления. В формуле раскрыты три варианта системы управления для силовой установки. 4 н. и 18 з.п. ф-лы, 39 ил.
Формула
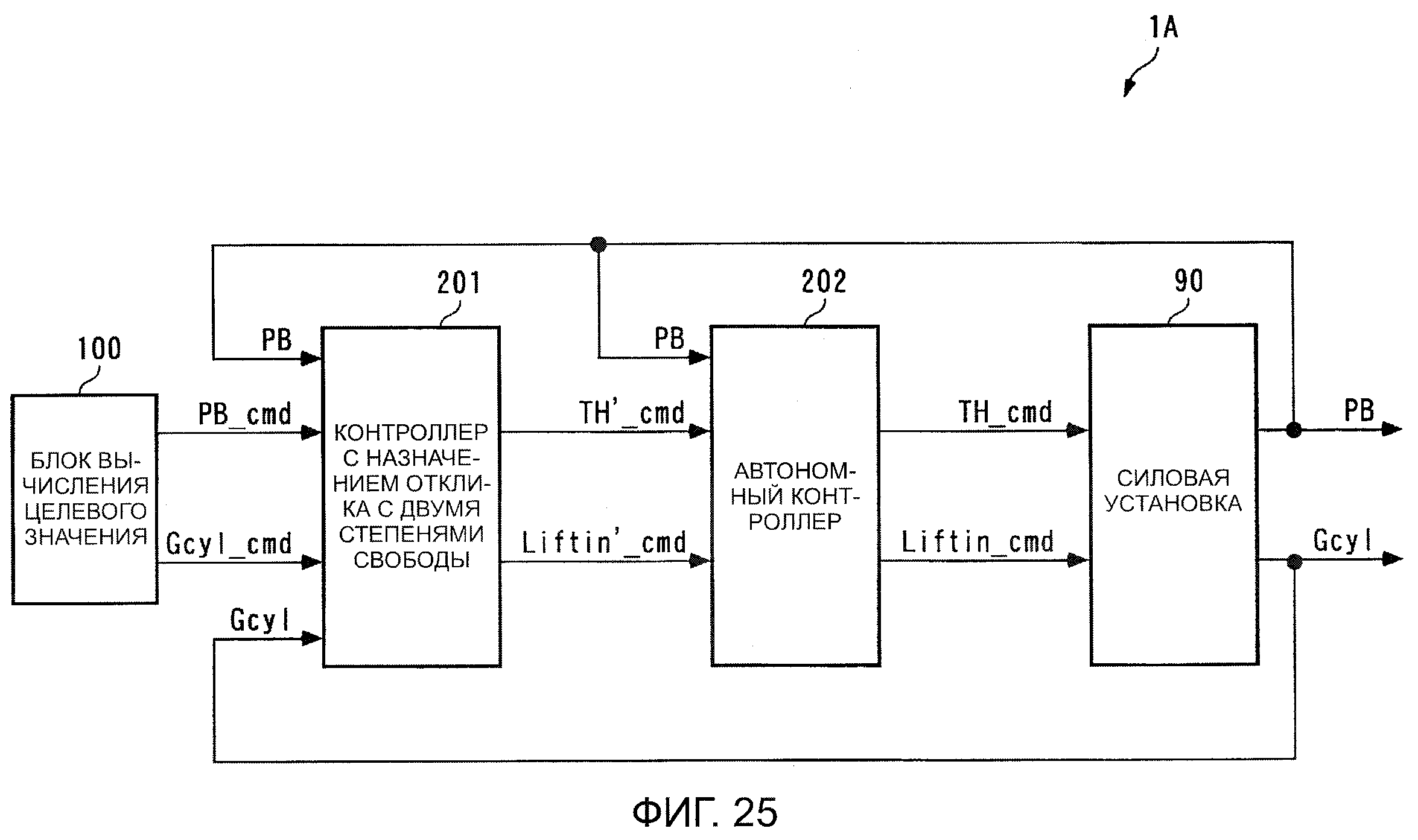
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки в виде модели системы с дискретным временем, причем определенный алгоритм управления включает в себя комбинацию определенного алгоритма управления с назначением отклика и определенного алгоритма автономного управления.
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки, включающего в себя комбинацию определенного алгоритма управления с двумя степенями свободы и определенного алгоритма автономного управления, причем определенный алгоритм управления с двумя степенями свободы представляет собой алгоритм, сформированный путем объединения определенного алгоритма фильтра целевого значения и определенного алгоритма управления с обратной связью.
средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки, включающего в себя определенный алгоритм автономного управления, причем модель силовой установки включает в себя множество невзаимосвязанных параметров для определения зависимости между входными сигналами управления и управляющими величинами,
указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления в соответствии, по меньшей мере, с одним из: невзаимосвязанных параметров и управляющих величин, и система управления дополнительно содержит средство идентификации для последовательной идентификации невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки.
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, включающего в себя определенный алгоритм автономного управления.
систему обработки паров топлива для временного поглощения паров топлива, образовавшихся внутри камеры сгорания, и подачи поглощенных паров топлива во впускной канал под действием давления во впускном канале, и средство измерения параметра скорости образования для измерения параметра скорости образования, характеризующего скорость образования паров топлива внутри камеры сгорания двигателя, а указанное средство задания целевых значений задает целевое значение давления во впускном канале равным тем более низкому значению, чем больше скорость образования паров топлива, характеризуемая измеренным параметром скорости образования.
Приоритет по пунктам:
Комментарии