Устройство для управления процессом обезвоживания - RU184548U1
Код документа: RU184548U1
Чертежи


Описание
Область техники
Настоящая полезная модель относится к устройству для управления процессом обезвоживания в устройстве гравитационной седиментации. В частности, настоящая полезная модель относится к многосвязному регулированию процесса гравитационной седиментации.
Предпосылки создания полезной модели
Для отделения твердых тел во взвесях (как правило содержащих твердые тела, взвешенные в жидкости) используются такие разделительные устройства, как сгустители, очистители и концентраторы, и их часто можно встретить в горной промышленности, при обработке минералов, в пищевой промышленности, при очистке сахара, обработке воды, очистке сточных вод и в других подобных отраслях. Эти устройства, как правило, содержат резервуар, в котором твердые тела осаждаются из взвеси или раствора на дно в виде пульпы или отстоя, который выпускают снизу и отправляют на переработку. Разбавленную жидкость с более низкой относительной плотностью перемещают в верхнюю часть резервуара для удаления через водосливный желоб. Взвесь, которую требуется уплотнить, первоначально подают через подающую трубу, трубопровод или линию в питающий резервуар, расположенный в пределах главного резервуара. Обычно устанавливают лопастной узел, вращающийся вокруг центрального ведущего вала и, как правило, по меньшей мере две наклонные лопасти, имеющее скреперные ножи для перемещения осевшего материала внутрь и сбора через отверстие для отстоя.
В приложении к обработке, разделению и извлечению минералов добытую руду превращают во взвешенную пульпу в соответствующей жидкой среде, такой как вода, в такой концентрации, что эта взвесь может течь, но выпадает в осадок в состоянии покоя. Пульпа оседает из взвеси вследствие комбинации силы тяжести и возможных химических или механических процессов. Одно или большее количество разделительных устройств может быть частью производственной цепочки, так чтобы выход одного устройства был связан со входом следующего.
Имеются различные проблемы, препятствующие операторам эффективно эксплуатировать разделительные устройства. Большие времена реакции в технологическом процессе, большие задержки при обработке и вариации массы во входном потоке затрудняют управление технологическим процессом. Часто это приводит к вариации качества отстоя, качества сливаемой жидкости или того и другого. Это, в свою очередь, может влиять на рабочие характеристики последующих процессов, то есть фильтрования, обработки отходов и работы системы рециркуляции воды. В настоящее время управление разделительными устройствами, такими как сгустители, осуществляется контроллерами с одной петлей обратной связи (например, пропорционально-интегрально-дифференциальными (PID) контроллерами) в распределенных системах управления (DCS) или в системах контроллеров с программируемой логикой (PLC). Медленная динамическая реакция и перекрестные влияния управляемых параметров, могут сделать настройку пропорционально-интегральных контуров весьма проблематичной, и приходится искать компромисс между надежностью системы и желаемой скоростью реакции. В практических рабочих ситуациях это может потребовать повторенного вмешательства оператора и работы контроллера, полностью или частично, в ручном режиме управления. В дополнение к понижению качества и увеличению вариаций на выходе технологического процесса, может увеличиться расход химических продуктов в таком процессе.
Сущность полезной модели
Цель полезной модели состоит в устранении некоторых или всех проблем, присущим современным техническим решениям в данной области техники.
В одном аспекте раскрыто устройство для управления процессом обезвоживания. Процесс обезвоживания в рамках данного описания может относиться к любому процессу, который включает отделение жидкости от твердого вещества. Предлагаемое устройство содержит устройство гравитационной седиментации, содержащее резервуар, кромку для удаления жидкости, переливающейся из резервуара, и по меньшей мере одну выпускную линию для удаления отстоя из резервуара; первый и второй датчики, предназначенные для измерения первого и второго рабочих параметров, представляющих состав материала в потоке отстоя из устройства гравитационной седиментации и уровень запаса материала в устройстве гравитационной седиментации соответственно; контроллер для мониторинга и регулировки рабочих параметров устройства гравитационной седиментации; и по меньшей мере одну память, содержащую компьютерный программный код. По меньшей мере одна память и компьютерный программный код заставляют контроллер выполнить следующее: прием первого набора значений, представляющих первый входной рабочий параметр, от первого датчика и второго набора значений, представляющих второй рабочий параметр, от второго датчика; затем использование по меньшей мере первого набора значений, принятых от первого датчика, и второго набора значений, принятых от второго датчика, в качестве входных значений для прогнозирующей многовариантной модели с целью предсказания рабочего состояние устройства гравитационной седиментации. Это рабочее состояние по меньшей мере частично зависит от рабочих параметров. Прогнозирующая многовариантная модель может быть загружена к память перед процессом обезвоживания или может генерироваться во время процесса. По меньшей мере одна память и компьютерный программный код заставляют контроллер выполнять определение с использованием прогнозирующей многовариантной модели по меньшей мере одного предсказанного выходного значения рабочего параметра в устройстве гравитационной седиментации по меньшей мере для одного момента в будущем; получение набора из одного или большего количества эталонных значений для рабочих параметров устройства гравитационной седиментации; выполнение сравнения по меньшей мере между одним предсказанным выходным значением и по меньшей мере одним эталонным значением из набора из одного или большего количества эталонных значений; и определение, по меньшей мере частично на основе этого сравнения, по меньшей мере одного набора из одной или большего количества управляющих значений по меньшей мере для одного управляющего параметра устройства гравитационной седиментации. Указанный по меньшей мере один управляющий параметр может по меньшей мере частично определять рабочее состояние устройства гравитационной седиментации. Кроме того, по меньшей мере одна память и компьютерный программный код заставляют контроллер регулировать с использованием по меньшей мере одного набора управляющих значений по меньшей мере один управляющий параметр устройства гравитационной седиментации. Указанный набор управляющих значений может включать временной ряд или пиковые значения и может непрерывно обновляться.
Специалистам очевидно, что шаги процесса в устройстве, раскрытом выше, не обязательно выполняются хронологически в том же самом порядке, как они перечислены. Например, получение набора из одного или большего количества эталонных значений может быть выполнено в любой точке процесса перед сравнением предсказанного выходного значения с указанными эталонными значениями.
Технические эффекты, которые могут быть достигнуты в рамках настоящей полезной модели, включают уменьшение вариаций выходных параметров процесса, таких как плотность отстоя или чистота переливаемой через край жидкости, уменьшение использования для процесса химических материалов, таких как флоккуляторы, и повышение производительности, следующее из увеличения времени протекания процесса согласно правильным параметрам и уменьшения времени и ресурсов, необходимых для ручных операций. Часть описания включает использование прогнозирующей многовариантной модели, которая, в свою очередь, может использоваться для оптимизированного определения управляющих параметров для процесса обезвоживания. По сравнению с традиционными экспертными системами, основанными на правилах, этот подход позволяет по-новому определять ограничения процесса. В зависимости от рабочих параметров и используемых ограничений, налагаемых на процесс, предлагаемый подход позволяет повысить эффективность процесса в различных аспектах.
Краткое описание чертежей
На сопровождающих чертежах, которые включены для лучшего понимания полезной модели и составляют часть данного документа, иллюстрируются варианты выполнения полезной модели и вместе с описанием помогают пояснить ее принципы.
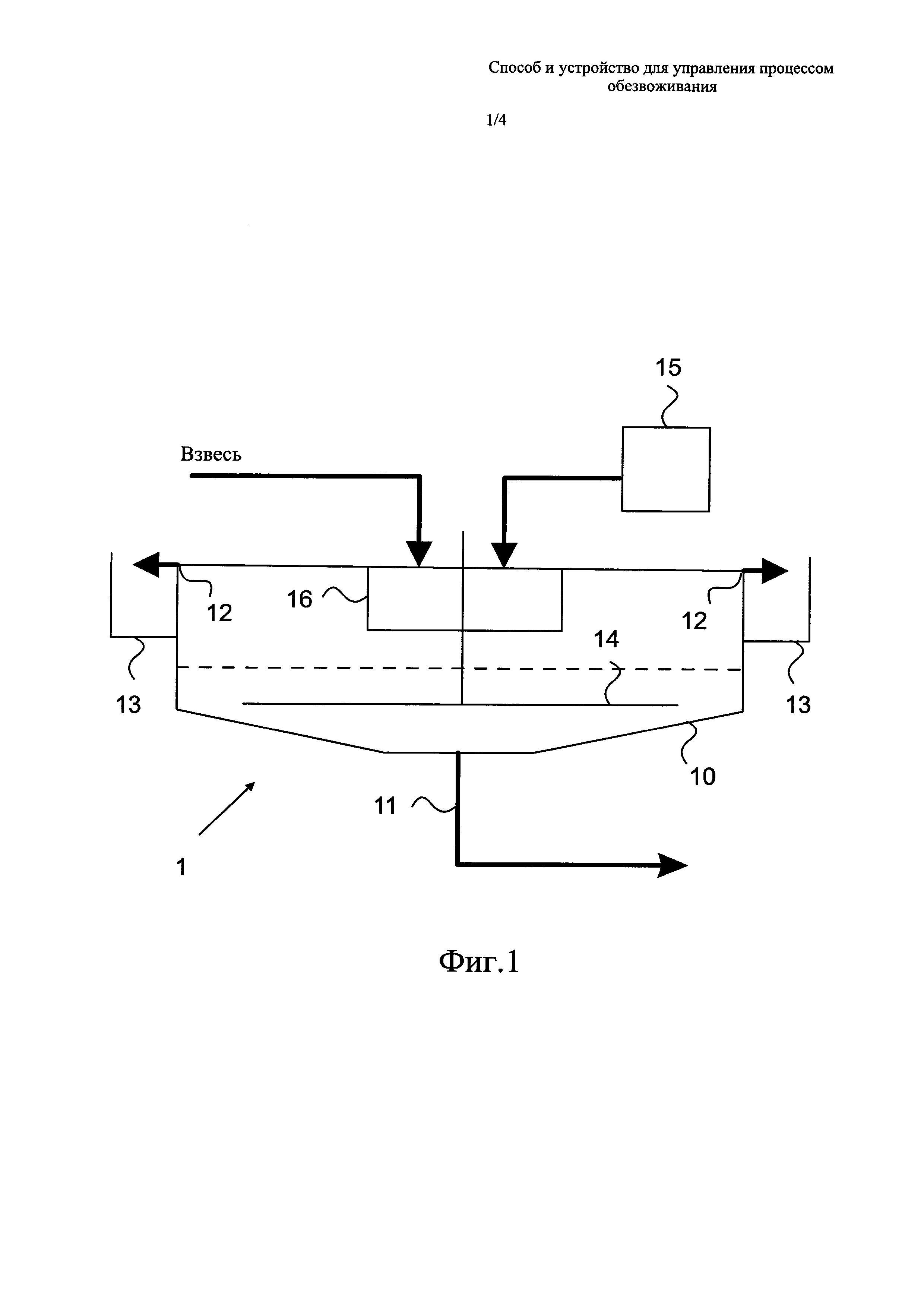
На фиг. 1 схематично показан пример варианта выполнения устройства гравитационной седиментации согласно полезной модели.
На фиг. 2 показан вариант выполнения многовариантной модели для предсказания рабочего состояния устройства гравитационной седиментации согласно полезной модели.
На фиг. 3 показан пример реализации прогнозирующей многовариантной модели для процесса обезвоживания согласно варианту выполнения полезной модели.
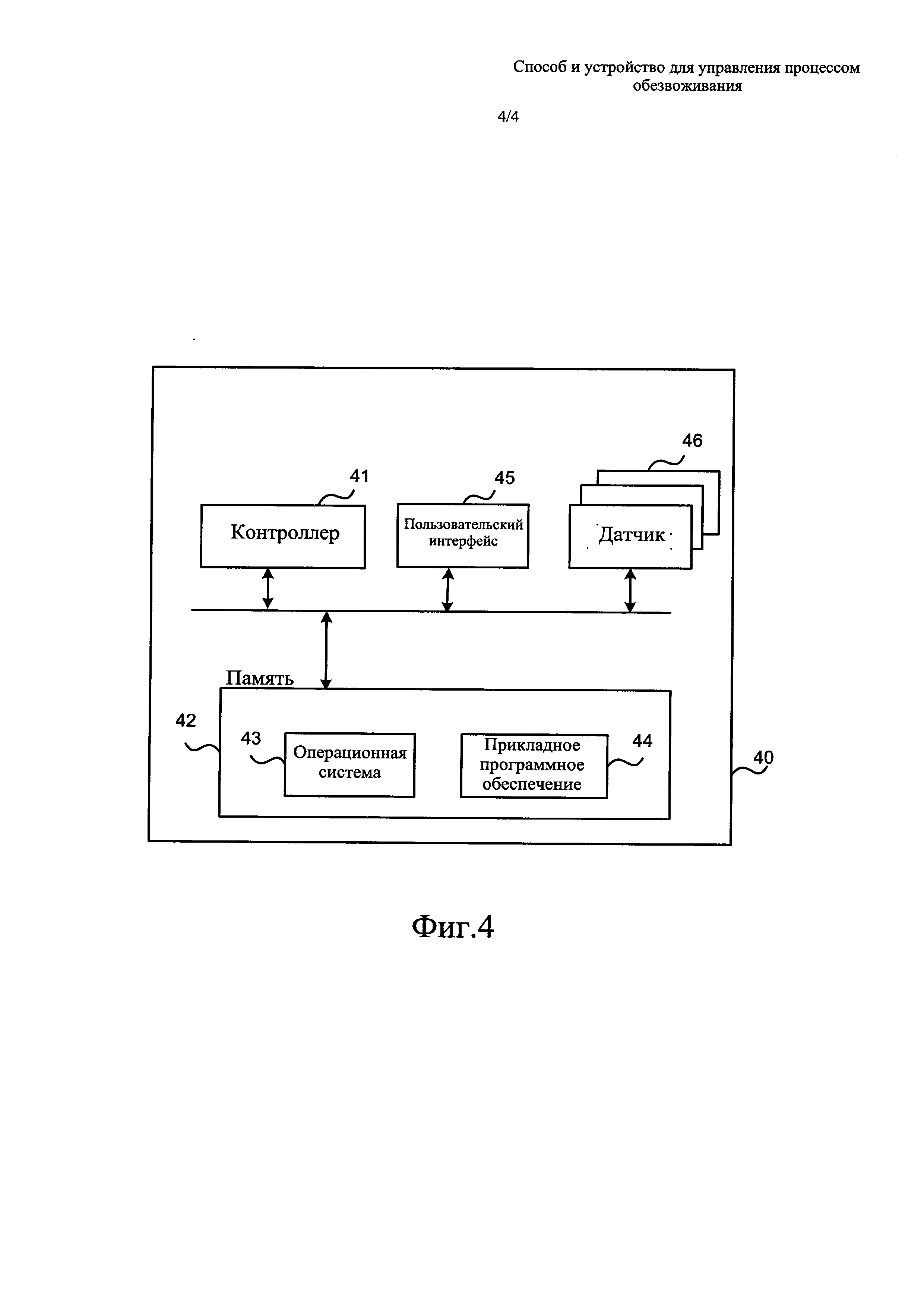
На фиг. 4 показана блок-схема устройства для управления процессом обезвоживания согласно варианту выполнения полезной модели.
Подробное описание полезной модели
Ниже подробно рассмотрены варианты выполнения полезной модели, примеры которых иллюстрируются на сопровождающих чертежах.
Процесс обезвоживания согласно полезной модели можно рассматривать как процесс разделения, в котором жидкость отделяют от твердого вещества. Материал, который будет подвергаться разделению в этом процессе, можно назвать жидким технологическим раствором. Как правило, несущей жидкостью является вода, но могут также использоваться другие жидкости. В частности, несущая жидкость может содержать смесь воды и технологических химических веществ, включая, например, кислоту/щелочь, металлы, соли и прочее. Для ускорения процесса седиментации могут использоваться такие химические вещества, как флоккуляторы или коагулянты.
В пределах резервуара постепенно формируются несколько зон или слоев материала, имеющие различные удельные веса. Внизу резервуара пульпа формирует относительно плотную зону уплотненной пульпы или твердых тел, которые часто находятся в виде связанных совокупностей (то есть совокупности пульпы находятся в непрерывном контакте друг с другом). Эту зону называют «пульповым основанием» или связанным пульповым слоем. Выше пульпового основания прилегает зона, в которой твердые тела еще полностью не схватились или не «уплотнились». Масштаб времени для процесса схватывания может занимать от нескольких минут до нескольких часов. Следовательно, механизмы управления технологическим процессом согласно вариантам выполнения полезной модели, рассмотренным ниже, могут учитывать медленные динамические процессы, входящие в общий процесс.
Хотя устройство гравитационной седиментации раскрыто в следующих примерах в отношении сгустителя, следует отметить, что принципы полезной модели могут быть осуществлены независимо от конкретного типа устройства гравитационной седиментации, например, при использовании сгустителя или очистителя. Сгуститель может быть, например, обычным сгустителем, сгустителем пасты или сгустителем отходов. Детали устройства могут зависеть от конкретной фазы процесса разделения, поскольку устройство может использоваться в различных точках вдоль линии устройств разделения в многофазном процессе разделения.
На фиг. 1 схематично показано устройство 1 гравитационной седиментации (ниже называемое «сгустителем»). Чертежи выполнены не в масштабе, и для ясности многие из компонентов сгустителя опущены. Схематичные направления для потока гидросмеси, переливного потока, отстоя и подачи химических веществ показаны стрелками.
В варианте выполнения полезной модели, показанном на фиг. 1, сгуститель 1 содержит резервуар 10 для материала, предназначенного для разделения. На чертеже штриховой линией обозначен верхний уровень пульпового основания. Резервуар может быть по существу цилиндрическим, и у него может дополнительно иметься коническое основание, предназначенное для подачи твердого материал к центру. Диаметр резервуара может составлять 5-100 м. Высота резервуара может составлять 1-20 м.
Отстой из сгустителя соответствует отделенным твердым телам, то есть пульпе, вытекающей из сгустителя. Отношение вода/твердое тело в отстое может меняться в зависимости от различных факторов, таких как фаза или эффективность процесса разделения. Резервуар может быть связан с одной или большим количеством линий отстоя 11 для удаления твердого материала из резервуара. Приемные концы линий отстоя могут быть расположены у основания резервуара. Кроме того, они могут быть расположены по существу в центре резервуара.
Переливной поток соответствует отделенной жидкости, вытекающей из сгустителя. Кроме того, отношение вода/твердое тело в переливном потоке может меняться в зависимости от различных факторов, таких как фаза или эффективность процесса разделения. Резервуар может быть связан с водосливной кромкой 12, предназначенной для удаления жидкости из резервуара. Водосливная кромка может содержать ободок резервуара. Кроме того, она может содержать ряд зубьев, расположенных по ободку резервуара с промежутками между ними. Переливной поток может быть удален из резервуара, просто перетекая через водосливную кромку. Резервуар может также быть связан с желобом 13 для собирания переливного потока из резервуара. Собранный переливной поток может быть возвращен в процесс разделения в подходящей фазе.
Сгуститель может дополнительно содержать лопастной элемент 14 для направления твердого материала к линии или линиям отстоя. Лопастной элемент может содержать по меньшей мере одну лопатку, вращающуюся вокруг вертикального вала, который расположен в середине резервуара. Лопастной элемент расположен, по меньшей мере частично, в пульповом основании.
Сгуститель может также содержать дозатор 15 химических веществ, предназначенный для дозированной подачи в резервуар таких химических веществ, как коагулянт или флоккулятор. Сгуститель может содержать питающий резервуар 16, куда как химическое вещество, так и поступающий жидкий раствор могут первоначально направляться для смешивания.
На фиг. 2 показана прогнозирующая многовариантную модель согласно варианту выполнения полезной модели. Рабочее состояние сгустителя может быть определено по его рабочим параметрам. Они могут включать управляемые параметры 21, управляющие параметры 22 и параметры 21 возмущения для сгустителя. Управляющими параметрами сгустителя можно манипулировать непосредственно, автоматически или оператором, для воздействия на рабочее состояние сгустителя, так чтобы значения управляемых параметров в результате изменились. Кроме того, параметры, которыми контроллер процесса обезвоживания не может управлять прямо или косвенно, рассматриваются как параметры возмущения.
Прогнозирующая многовариантная модель 20 создана и используется для предсказания рабочего состояния сгустителя. В качестве входных параметров модель может использовать рабочие параметры сгустителя. В одном из вариантов выполнения полезной модели входные параметры для многовариантной прогнозирующей модели могут включать измеренные значения управляемых параметров 21, историю изменения управляющих переменных 22, измеренные значения параметров возмущения 21. Предсказанные управляющие переменные и управляемые переменные также могут использоваться в качестве входных параметров модели. На выходе модель дает прогноз рабочего состояния сгустителя по меньшей мере для одного момента в будущем. Поскольку модель является многовариантной, для ввода требуются по меньшей мере два рабочих параметра. Эти рабочие параметры могут включать по меньшей мере два управляемых параметра. Фактическая параметризация модели, которая определяет, сколько значений входных параметров определяют предсказанные выходные значения, может быть выполнена с использованием тестов, моделирования или их комбинации. Следовательно, сама модель может быть определена заранее и храниться в памяти. Прогнозирующая многовариантная модель может использоваться для управления технологическим процессом, обеспечивая несколько эффектов: например, улучшение обработки динамических параметров с медленной реакцией или для учета перекрестного влияния управляемых параметров. Кроме того, управление процессом на основе такой модели позволяет учитывать различные типы ограничений, включая ограничения минимального/ максимального значений для рабочих параметров и установление желательных приоритетов между рабочими параметрами, включая управляющие параметры.
В прогнозирующей многовариантной модели 30 в качестве входных значений можно использовать измеренные значения рабочих параметров. Измеренные значения могут включать набор последовательных во времени значений, то есть, несколько измеренных значений для рабочего параметра в течение некоторого времени. Модель может также выдавать предсказанные выходные значения для одного или большего количества будущих моментов. В одном из вариантов выполнения полезной модели «горизонт» или пределы этого временного ряда могут быть определены для прошлого и будущего, и прогноз на будущее может быть продемонстрирован оператору, измеренные значения могут обновляться регулярно, а предсказанные выходные значения могут обновляться в ответ. Частота обновления в модели и частота предсказанных выходных значений может отличаться от частоты измерения.
Согласно еще одному варианту выполнения полезной модели, указанная модель может быть моделью динамического отклика. Она может включать, например, модель ступенчатого отклика или модель импульсного отклика. Модель может также использовать алгоритм модели прогнозируемого управления (МРС, model predictive control).
В контексте полезной модели было обнаружено, что для эффективного регулирования нескольких взаимосвязанных значений для процесса обезвоживания можно использовать специфическую комбинацию рабочих параметров для создания модели, описывающей рабочее состояние сгустителя. Модель может использоваться контроллером для предсказания будущего рабочего состояние сгустителя и определения операций по управлению, которые приведут процесс к желательному состоянию. Управляемые параметры могут представлять по меньшей мере консистенцию материала в отстое сгустителя и уровень запасов материала в сгустителе. Можно использовать дополнительные параметры, включая один или большее количество из следующего: мутность или содержание твердых тел в переливном потоке из сгустителя и вращающий момент, действующий на лопасти сгустителя. Кроме того, можно использовать такие параметры возмущения, как расход материала в сгустителе. В качестве управляющих параметров используется по меньшей мере скорость отстоя в сгустителе. Однако можно использовать также такие дополнительные управляющие параметры, как скорость подачи химических веществ в сгуститель. Было обнаружено, что минимальный набор из двух управляемых и одного управляющего параметра, включающий консистенцию материала в отстое, уровень запасов материала в сгустителе и скорость отстоя, - может использоваться для жесткого регулирования нескольких взаимосвязанных параметров сгустителя. Альтернативно, для более детального описания рабочего состояния сгустителя может использоваться комбинация из трех управляемых и двух управляющих параметров, дополнительно включая мутность или содержание твердых тел в переливном потоке и скорость подачи химических веществ. В общем случае использование более одного управляемого параметра в многовариантном контроллере может позволить установить приоритеты между управляемыми параметрами. Соответственно, использование более одного управляющего параметра в многовариантном контроллере может обеспечить установление приоритетов между управляющими параметрами.
В зависимости от конфигурации измерений, подходящей для любого конкретного приложения, рабочие параметры, введенные выше, на практике могут быть определены больше, чем одним путем. Консистенция материала в отстое может быть определена, например, по измерению содержания твердых тел в отстое или по параметрам нагнетания отстоя. Можно организовать последовательность измерений. Предыдущее измерение может быть выполнено, например, путем измерения плотности отстоя, а последующие - например, путем измерения вязкости отстоя. Когда консистенция материала в отстое входит в модель, контроллер может осуществлять мониторинг качества отстоя и/или его вариацию во времени. Благодаря вариациям в консистенции материала отстой может иногда становиться слишком плотным, что может привести к засорению линий отстоя. Уменьшая эту плотность можно снизить вероятность засорения.
Уровень запасов материала в сгустителе описывает размер пульпового основания в резервуаре. Уровень запасов материала можно измерить, например, как уровень или высоту пульпового основания, или вычислить по гидравлическому давлению на основание или боковую стенку сгустителя. Когда уровень запасов материала сгустителя включен в модель, контроллер может контролировать состояние пульпового основания, указывающее на количество твердого материала в резервуаре.
Значение параметра, представляющего собой мутность или содержание твердых тел в переливном потоке, может быть измерено прямо в переливающейся жидкости. Альтернативно или дополнительно оно может быть измерено косвенно, например по измерениям параметров жидкости в резервуаре. Такие измерения могут включать оптические измерения, измерение мутности или измерение содержания твердых тел на основе, например, прозрачности воды (мутность), обратного рассеяния, например, инфракрасного излучения, ультразвука, радиоволн и т.п. Когда мутность или содержание твердых тел включено в модель, контроллер может осуществлять мониторинг качества переливающейся жидкости.
Вращающий момент, действующий на лопасти, может быть измерен в любой точке лопасти, например на краю лопасти. Значение вращающего момента может быть вычислено по измерению гидравлического давления или тока в зависимости от конструкции приводной системы. Это измерение может быть выполнено в режиме реального времени без остановки процесса. Когда вращающий момент, действующий на лопасти, включен в модель, контроллер может не выполнять операции по управлению, которые привели бы к возникновению избыточных сил, действующих на лопасти.
Расход материала в сгустителе можно рассматривать как параметр возмущения, так как не любыми отклонениями консистенции жидкого раствора можно управлять. Однако в случае, когда контроллер процесса обезвоживания может осуществлять по меньшей мере какое-то управление этим параметром, расход материала можно рассматривать как один из управляемых параметров. Расход материала можно определить как расход сухой массы. Расход материала можно определить, например, по измерению скорости потока жидкого раствора, поступающего в сгуститель, с использованием расходометра и плотности поступающего жидкого раствора с использованием измерителя плотности. Когда расход материала в сгустителе включен в модель, контроллер может реагировать на любые изменения поступающего жидкого раствора до того, как он осядет на дно резервуара.
Для сгустителя, имеющего больше одной линии отстоя, любой параметр, связанный с отстоем, может быть определен, например, как усредненное значение соответствующего параметра, определенного для отдельных линий отстоя.
Скоростью отстоя можно управлять с использованием средств регулирования потока, таких как насос или вентиль. Когда используется насос, скорость отстоя можно включить в модель, например, как скорость насоса для отстоя. При использовании скорости отстоя в качестве управляющего параметра контроллер может ускорить или замедлить удаление твердых тел из сгустителя в зависимости от состояния сгустителя. Контроллер может также оптимизировать использование средства регулирования потока, например определяя оптимальное состояние для регулирования потока и выполняя другие операции по управлению так, чтобы поддерживалось оптимальное состояние для регулирования потока.
Скорость подачи химических веществ описывает количество химических продуктов, введенных в сгуститель во время процесса. При использовании скорости подачи химических веществ в качестве управляющего параметра контроллер может оптимизировать использование химических продуктов во время процесса.
Для определения значения управляемых параметров могут использоваться один или большее количество датчиков для каждого параметра. Датчики могут включать датчики расхода, датчики плотности, датчики массы, датчики давления, датчики содержания твердых тел, оптические датчики, например измеряющие коэффициент отражения, прозрачность или обратное рассеяние, датчики силы, датчики вращающего момента и т.д.
На фиг. 3 показана последовательность операций для прогнозирующей многовариантной модели для процесса обезвоживания согласно одному из вариантов выполнения полезной модели. Операции, показанные на чертеже, могут также выполняться контроллером. Хотя эти операции представлены в определенном порядке, фактический порядок их выполнения может быть изменен.
В варианте выполнения полезной модели, показанном на фиг. 3, измеряют (31) значения по меньшей мере для двух рабочих параметров. Набор измеренных рабочих параметров включает по меньшей мере консистенцию материала отстоя в сгустителе и уровень запасов материала в сгустителе. Результаты измерений для каждого измеренного рабочего параметра могут включать одно или большее количество отдельных значений, измеренных в отдельные моменты времени. Результаты измерений могут также обновляться с помощью последовательных измерений. В любой фазе процесса получают (32) набор из одного или большего количества эталонных значений для рабочих параметров сгустителя. Эти эталонные значения могут включать целевые значения (то есть установочные значения) для рабочих параметров. Они могут также включать предельные значения, такие как минимальное или максимальное значения для рабочих параметров сгустителя. Для одного рабочего параметра может быть дано одно или большее количество эталонных значений. Кроме того, можно также определить эталонные значения, зависящие от времени, так, чтобы у рабочего параметра было, например, более одного целевого значения, которые соответствуют различным моментам в будущем. Эталонные значения могут быть заданы заранее или они могут быть выданы или обновлены оператором в любой фазе процесса обезвоживания. Они также могут регулироваться динамически, и это регулирование может зависеть от состояния системы.
По меньшей мере часть измеренных значений для рабочих параметров сгустителя используют (33) в качестве входных значений для прогнозирующей многовариантной модели. Прогнозирующая многовариантная модель может использовать входные значения для предсказания рабочего состояния сгустителя в будущем. Так как рабочие параметры по меньшей мере частично определяют рабочее состояние сгустителя, модель также описывает рабочее состояние с некоторой точностью. Как описано выше, точная параметризация в рамках указанной модели может быть выполнена, например, при использовании метода проб или моделирования. В зависимости от параметров модели эта модель может выдавать (34) предсказанные выходные значения для любого или всех рабочих параметров в один или большее количество моментов в будущем. Предсказанные выходные значения могут выдаваться оператору процесса.
По меньшей мере одни предсказанные выходные значения модели сравнивают (35) по меньшей мере с одним из полученных эталонных значений, чтобы определить, как предсказанные выходные значения соотносятся с желательными выходными значениями. Сравнение может быть отдельным, чтобы определить выходные значения модели, так чтобы сначала определить предсказанный горизонт для рабочего состояния, а затем желательное выходное значение, определенное одним или большим количеством эталонных значений, сравнить с предсказанным выходным значением. Это сравнение может соответствовать вычислению девиации между предсказанным выходным значением и эталонным значением. Сравнение может также соответствовать использованию любой математической зависимости для определения, как предсказанное выходное значение относится к одному или большему количеству эталонных значений. Например, можно использовать ступенчатую функцию, чтобы определить, является ли предсказанное выходное значение меньше или больше, чем эталонное значение, или можно использовать экспоненциальную функцию, чтобы представить некий коэффициент для предсказанного выходного значения в зависимости от того, как близко это предсказанное значение находится к эталонному значению.
Это сравнение может использоваться, чтобы определить (36) управляющие значения для управляющих параметров и направить рабочее состояние сгустителя к желательному рабочему состоянию, определенному эталонными значениями. Это определение может включать оптимизацию предсказанного выходного значения относительно управляющих значений для управляющих параметров. Это может быть выполнено, например, путем определения (34) предсказанного выходного значения более одного раза с использованием в качестве входных значений различных управляющих значений для одного или большего количества управляющих параметров и сравнения (35) каждого из предсказанных выходных значений с эталонными значениями, чтобы определить предпочтительный набор управляющих значений. Это может быть сделано с использованием соответствующих математических методов оптимизации для систем, имеющих набор управляющих переменных и набор реакций связи. Управляющие значения могут быть определены как отдельные значения для управляющего параметра или как набор планируемых значений. Управляющее значение может соответствовать любому моменту в настоящем или будущем.
Управляющие параметры регулируют (37) на основе управляющих значений. Это регулирование может включать, например, непрерывное регулирование скорости насоса для отстоя или регулирование в моменты, определенные графиком регулирования. Регулирование может также включать регулирование скорости подачи химических веществ в резервуар или питающий резервуар сгустителя. Если управляющие параметры содержат график регулирования, можно следовать этому графику. График может также быть выдан оператору процесса. Однако не обязательно следовать этому графику - он может быть выдан только для информации. Например, рабочее состояние сгустителя может быть предсказано и отображено в течение расширенного горизонта времени, но модель может обновляться прежде, чем выполнено любое управляющее регулирование кроме первого.
Согласно еще одному варианту выполнения полезной модели, для определения управляющего значения может использоваться функция затрат. В таком случае функция затрат может использоваться в качестве ввода по меньшей мере некоторых из предсказанных выходных значений и по меньшей мере некоторых из эталонных значений. В фазе (35) сравнения значение функции затрат может быть определено на основе математической зависимости по меньшей мере между одним предсказанным выходным значением и по меньшей мере одним эталонным значением. Это определение может включать определение зависимости на основе значений, соответствующих больше чем одной точке на временной шкале, например путем интегрирования разности заранее определенного значения и эталонного значения для рабочего параметра по некоторому временному интервалу. В качестве управляющих значений, используемых для регулирования (37), могут быть выбраны те значения, которые минимизируют функцию затрат при условиях, определяемых эталонными значениями. Установлено, что определение набора управляющих значений, минимизирующих функцию затрат, может потребовать нескольких циклов определения (34) предсказанного выходного значения и сравнения (35) его с эталонными значениями.
Согласно различным вариантам выполнения полезной модели, задаются конкретные комбинации рабочих параметров и эталонных значений. Любые наборы таких комбинаций могут использоваться совместно.
Согласно еще одному варианту выполнения полезной модели, целевое значение (то есть установленное значение) может быть назначено для консистенции материала в сгустителе. В таком случае предсказанное выходное значение включает предсказанную консистенцию материала в отстое сгустителя, а набор эталонных значений включает целевое эталонное значение для консистенции материала в отстое. Являясь заданным значением, это целевое значение может использоваться в качестве первичного управляющего значения в течение большей части времени протекания процесса, пока выполняются другие ограничения.
Согласно еще одному варианту выполнения полезной модели для уровня запасов материала в сгуститель может быть назначено как минимальное, так и максимальное значение. Это обеспечивает больший диапазон для оптимизации плотности, поскольку измерение точного уровня запасов материала не является необходимым. Согласно еще одному варианту выполнения полезной модели, максимальное значение может быть назначено для мутности или содержания твердых тел в переливном потоке сгустителя.
Согласно еще одному варианту выполнения полезной модели, максимальное значение может быть назначено для вращающего момента, действующего на лопасти сгустителя. Устанавливая предел для максимального вращающего момента, можно отрегулировать управляющие параметры так, чтобы не был превышен предел, при котором лопасть застряла бы или сломалась.
Согласно еще одному варианту выполнения полезной модели, любому из управляющих параметров можно также назначить одно или большее количество эталонных значений. Эти эталонные значения могут включать любую комбинацию из максимума, минимума и целевых значений.
Согласно еще одному варианту выполнения полезной модели, управление процессом обезвоживания может быть выполнено с условием минимизации скорости подачи химических веществ. В таком случае условие минимизации скорости подачи химических веществ может быть включено в определение (36) управляющих значений. Это может быть сделано, например, включением члена, пропорционального значению скорости подачи химических веществ, в функцию затрат.
Установлено, что поскольку типичные временные масштабы в процессе регулирования в сгустителе очень велики, часто нецелесообразно проводить быстрые управляющие маневры. Вместо этого при использовании прогнозирующей модели для оценки будущего рабочего состояние сгустителя можно оптимизировать долговременное управляющее регулирование. Кроме того, при использовании указанной модели могут использоваться различные типы ограничений и условий для процесса.
На фиг. 4 показано устройство 40 для управления процессом обезвоживания согласно одному из вариантов выполнения полезной модели. Это устройство содержит контроллер 41, память 42, в которой хранится операционная система 43 и прикладное программное обеспечение 44, пользовательский интерфейс 45 и один или большее количество датчиков 46. Пользовательский интерфейс 45 принимает от пользователя входные значения, которые могут содержать команду запуска процесса обезвоживания и/или входные значения, содержащие эталонные значения для рабочих параметров устройства гравитационной седиментации. Один или большее количество датчиков 46 измеряют по меньшей мере первый и второй набор для одного или большего количества значений рабочих параметров устройства гравитационной седиментации. Первый набор может представлять консистенцию материала в отстое, а второй набор может представлять уровень запасов материала. Один или большее количество датчиков 46 могут измерять другие рабочие параметры - например, параметры, описанные выше в вариантах выполнения полезной модели.
Память 42 содержит прикладное программное обеспечение 44, которое при его выполнении в рабочей системе 43 заставляет контроллер 41 выполнять шаги, описанные в вышеуказанных вариантах выполнения полезной модели. Контроллер 41 может также координировать работу элементов 45, 46, 42 устройства 40 для выполнения ими измерений во времени рабочих параметров с использованием одного или большего количества датчиков 46 и при необходимости принимать входные значения от пользователя через пользовательский интерфейс 45. В альтернативных вариантах выполнения полезной модели ввод значений пользователем может быть заменен автоматически генерируемыми эталонными значениями.
Хотя предмет полезной модели был описан на конкретных конструктивных деталях и/или действиях, очевидно, что предмет полезной модели, определенный в пунктах формулы полезной модели, не обязательно ограничен конкретными признаками или действиями, описанными выше. Напротив, конкретные признаки и действия, описанные выше, раскрыты как варианты выполнения пунктов формулы полезной модели, и в объеме полезной модели могут находиться другие эквивалентные признаки и действия.
Очевидно, что выгоды и преимущества, описанные выше, могут относиться к одному варианту выполнения полезной модели или к нескольким вариантам выполнения полезной модели. Варианты выполнения полезной модели не ограничены теми, которые решают некоторые или все из поставленных задач, или теми, которые обладают любым из заявленных выгод и преимуществ. Очевидно, что употребление единственного числа для некоторого элемента в описании означает один или несколько таких элементов.
Шаги, описанные выше, могут быть выполнены в любом подходящем порядке или одновременно, если это возможно. Кроме того, отдельные блоки могут быть изъяты без отхода от сущности и объема полезной модели. Аспекты любого из вариантов выполнения полезной модели, описанные выше, могут быть скомбинированы с аспектами любого из других вариантов выполнения полезной модели с формированием дополнительных вариантов выполнения полезной модели без потери искомого эффекта.
В контексте настоящего документа термин «содержащий» означает включение блока или идентифицированных элементов, но не подразумевает, что в список входят только такие блоки или элементы, и устройство может содержать дополнительные блоки или элементы.
Очевидно, что приведенное выше описание дано только для примера и что специалисты могут сделать различные изменения. Приведенное выше описание, примеры и данные дают полное описание конструкции и использования примеров вариантов выполнения полезной модели. Хотя различные варианты выполнения полезной модели были описаны выше с определенной степенью конкретики или в отношении одного или более отдельных вариантов выполнения полезной модели, специалисты в данной области техники могут сделать многочисленные изменения к раскрытым вариантам выполнения полезной модели без отхода от сущности и объема настоящего документа.
Реферат
Полезная модель относится к устройству для управления процессом обезвоживания, включающим измерение значений, представляющих рабочие параметры устройства гравитационной седиментации, и использование этих значений как входных значений для прогнозирующей многовариантной модели с целью предсказания рабочего состояния устройства гравитационной седиментации. Кроме того, полезная модель относится к получению эталонных значений для рабочих параметров, определению по меньшей мере одного предсказанного выходного значения для рабочего параметра устройства гравитационной седиментации и сравнению предсказанного выходного значения с эталонными значениями для определения управляющих значений, которые приводят к изменениям в работе устройства гравитационной седиментации. Фиг. 3.
Комментарии