Способ управления исполнительным механизмом регулируемой установки фаз кулачкового распределения (варианты) и двигатель, содержащий систему управления исполнительным механизмом регулируемой установки фаз кулачкового распределения - RU2633284C2
Код документа: RU2633284C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в целом, к управлению работой двигателя и, в частности, к установке фаз кулачкового распределения.
УРОВЕНЬ ТЕХНИКИ
Системы регулируемой установки фаз кулачкового распределения (VCT) могут быть реализованы в двигателе для регулирования положения распределительного вала, которое вызывает осуществление опережения или запаздывания установки фаз распределительного вала. Посредством управления установкой фаз кулачкового распределения с помощью системы VCT, установка фаз распределения впускных/выпускных клапанов может меняться на основании условий работы двигателя, таких как нагрузка двигателя и число оборотов двигателя. Такое регулируемое управление содействует повышенной эффективности двигателя, уменьшенным выбросам и увеличенной эффективности использования топлива по сравнению с двигателями с фиксированными распределительными валами.
Подробнее, электрические системы VCT обеспечивают функциональные возможности регулировки положения распределительных валов, пока двигатель проворачивает коленчатый вал, и события зажигания не происходят. Другими словами, электрическая система VCT может перемещать распределительный вал в требуемое положение для первого события зажигания во время запуска двигателя. В одном из примеров, электрическая система VCT регулирует положение распределительного вала на основании замкнутой обратной связи, которая рассчитывается на основании сигналов положения коленчатого вала и профильного считывания зажигания (PIP) распределительного вала. Эти сигналы могут быть недоступны и/или могут быть недостоверными до тех пор, пока число оборотов двигателя не удовлетворяет минимальному пороговому значению. Соответственно, управление с замкнутой обратной связью распределительным валом недоступно до тех пор, пока число оборотов двигателя не удовлетворяет минимальному пороговому значению. Один из способов избежать этой проблемы состоит в том, чтобы переместить распределительный вал в требуемое положение для первого события зажигания до останова двигателя. Таким образом, распределительный вал может быть расположен в требуемом положении, когда двигатель запускается.
Однако, авторы в материалах настоящей заявки увидели потенциальные проблемы у такого подхода. Например, система VCT может не включать в себя стопорные штифты для удержания распределительного вала в требуемом положении, когда нет питания у системы VCT. В таких случаях, замкнутая обратная связь не доступна, когда число оборотов двигателя падает ниже определенного порогового значения во время останова двигателя и до того, как число оборотов двигателя находится выше другого порогового значения во время запуска двигателя. Поэтому, положение распределительного вала может перемещаться в задержанное положение вследствие эффектов сопротивления трения во время неуправляемых фаз и, таким образом, не поддерживаться в требуемом положении для первого события зажигания в двигателе.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Таким образом, в одном из примеров, некоторые из вышеприведенных проблем могут быть решены способом для управления электрическим исполнительным механизмом VCT.
В одном аспекте раскрывается способ управления исполнительным механизмом регулируемой установки фаз кулачкового распределения (VCT), включающий этапы, на которых: во время останова двигателя, регулируют распределительный вал с помощью исполнительного механизма VCT до целевого начального положения; применяют первый удерживающий уровень к исполнительному механизму VCT для поддержания целевого начального положения; и во время запуска двигателя до того, как обратная связь по положению распределительного вала становится доступной, применяют второй удерживающий уровень к исполнительному механизму VCT для поддержания целевого начального положения.
В дополнительных аспектах раскрывается, что исполнительный механизм VCT является электрическим исполнительным механизмом VCT, а первый удерживающий уровень является первым током, и второй удерживающий уровень является вторым током; увеличивают ток, прикладываемый к электрическому исполнительному механизму VCT от первого тока до третьего тока, который является большим, чем первый ток, чтобы компенсировать переходные инерционные нагрузки клапанного механизма во время останова двигателя; в ответ на обратную связь по положению распределительного вала, становящуюся доступной после запуска двигателя, подтверждают положение распределительного вала; и регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, если распределительный вал не находится в целевом начальном положении; в ответ на положение распределительного вала, большее, чем пороговое значение от целевого начального положения, регулируют один или оба из первого тока и второго тока, прикладываемых к электрическому исполнительному механизму VCT, для поддержания распределительного вала в целевом начальном положении для следующего запуска двигателя; первый ток прикладывается в ответ на обратную связь по положению распределительного вала, становящуюся недоступной, пока двигатель вращается во время останова двигателя; первый ток устанавливается до постоянного уровня тока независимо от условий, а второй ток устанавливается до постоянного уровня тока независимо от условий; первый ток меньше, чем второй ток.
В другом аспекте раскрывается двигатель, содержащий по меньшей мере один цилиндр, распределительный вал, присоединенный к по меньшей мере одному цилиндру и приводимый в действие для управления впускным и/или выпускным клапаном по меньшей мере одного цилиндра, и систему управления исполнительным механизмом регулируемой установки фаз кулачкового распределения, содержащую электрический исполнительный механизм VCT функционально присоединенный к распределительному валу и выполненный с возможностью позиционирования распределительного вала; и контроллер, содержащий процессор и машинно-читаемый носитель, имеющий команды, которые при выполнении процессором: во время останова двигателя, регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения; прикладывают первый ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения; и во время запуска двигателя до того, как обратная связь по положению распределительного вала становится доступной, прикладывают второй ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения.
В дополнительных аспектах раскрывается, что машинно-читаемый носитель дополнительно включает в себя команды, которые при выполнении процессором: увеличивают ток, прикладываемый к электрическому исполнительному механизму VCT от первого тока до третьего тока, который больше, чем первый ток, чтобы компенсировать переходные инерционные нагрузки клапанного механизма во время останова двигателя; машинно-читаемый носитель дополнительно включает в себя команды, которые при выполнении процессором: в ответ на обратную связь по положению распределительного вала, которая становится доступной после запуска двигателя, подтверждают положение распределительного вала; и регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, если распределительный вал не находится в целевом начальном положении; машинно-читаемый носитель дополнительно включает в себя команды, которые при выполнении процессором: в ответ на положение распределительного вала, большее, чем пороговое значение от целевого начального положения, регулируют один или оба из первого тока и второго тока, прикладываемых к электрическому исполнительному механизму VCT, для поддержания распределительного вала в целевом начальном положении для следующего запуска двигателя; первый ток прикладывается в ответ на обратную связь по положению распределительного вала, которая становится недоступной, пока двигатель вращается во время останова двигателя; первый ток устанавливается до постоянного уровня тока независимо от условий, и второй ток устанавливается до постоянного уровня тока независимо от условий; в которой первый ток меньше, чем второй ток.
В еще одном аспекте раскрывается способ управления исполнительным механизмом регулируемой установки фаз кулачкового распределения, включающий этапы, на которых: во время останова двигателя, регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения; в ответ на сигнал положения распределительного вала, который становится недоступным, пока двигатель вращается во время останова двигателя, прикладывают первый ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения; и увеличивают ток, прикладываемый к электрическому исполнительному механизму VCT от первого тока до второго тока, который больше, чем первый ток, чтобы компенсировать переходные инерционные нагрузки клапанного механизма во время останова двигателя; и во время запуска двигателя до того, как обратная связь по положению распределительного вала становится доступной, прикладывают третий ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения.
В дополнительных аспектах раскрывается, что в ответ на обратную связь по положению распределительного вала, которая становится доступной после запуска двигателя, подтверждают положение распределительного вала; и регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, если распределительный вал не находится в целевом начальном положении; в ответ на положение распределительного вала, большее, чем пороговое значение от целевого начального положения, регулируют один или оба из первого тока и второго тока, прикладываемых к электрическому исполнительному механизму VCT, для поддержания распределительного вала в целевом начальном положении для следующего запуска двигателя; первый ток меньше, чем третий ток, и при этом, третий ток прикладывается к электрическому исполнительному механизму VCT до тех пор, пока число оборотов двигателя не станет большим, чем пороговое значение числа оборотов.
В еще одном аспекте раскрывается, способ управления исполнительным механизмом регулируемой установки фаз кулачкового распределения, включающий этап, на котором: прикладывают разные уровни тока к электрическому исполнительному механизму VCT двигателя во время разных условий работы двигателя без осуществления сгорания, включая останов и незамедлительное последующее прокручивание коленчатого вала и запуск, пока недоступна обратная связь по положению распределительного вала.
Способ включает в себя, во время останова двигателя, регулирование распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, прикладывание первого тока к электрическому исполнительному механизму VCT для поддержания целевого начального положения, а во время запуска до того, как обратная связь по распределительному валу становится доступной, прикладывание второго тока к электрическому исполнительному механизму VCT для поддержания целевого начального положения. Первый ток может быть постоянным уровнем тока независимо от условий, или он может регулироваться до различных других уровней в зависимости от условий. Подобным образом, второй ток также может быть постоянным уровнем тока независимо от условий, или он может регулироваться до различных других уровней в зависимости от условий, но, тем не менее, он является иным, чем первый ток для данной процедуры пуска двигателя.
В одном из примеров, посредством выдачи намеченных токов на исполнительный механизм VCT, когда измерение распределительного вала недоступно во время останова и запуска двигателя, распределительный вал может по существу предохраняться от ухода от целевого начального положения. В некоторых вариантах осуществления, ток, прикладываемый к исполнительному механизму VCT, может отличаться между остановом двигателя и запуском двигателя, так как может отличаться крутящий момент, который прикладывается к распределительному валу во время останова двигателя и запуска двигателя. Кроме того, когда обратная связь по положению распределительного вала становится доступной, точность положения распределительного вала относительно целевого начального положения может подтверждаться. В случае, если положение распределительного вала не находится в целевом начальном положении, электрический исполнительный механизм VCT может управляться, чтобы быстро отрегулировать положение распределительного вала до целевого начального положения, поскольку распределительный вал вероятно должен быть близок к целевому начальному положению. Таким образом, время, чтобы распределительный вал достигал целевого начального положения после восстановления управления с обратной связью, может существенно сокращаться, или, в идеальном случае, уменьшаться до нуля, относительно электрической системы VCT, которая не предусматривает разных уровней тока для разных условий, когда не доступна обратная связь по положению распределительного вала.
Следует понимать, что раскрытие изобретения, приведенное выше, предоставлено для ознакомления в упрощенной форме с подборкой концепций, которые дополнительно описаны в подробном описании изобретения. Оно не идентифицирует ключевые или существенные признаков заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые решают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
фиг. 1 показывает вариант осуществления системы двигателя согласно настоящему описанию.
фиг. 2 показывает вариант осуществления электрической системы регулируемой установки фаз кулачкового распределения (VCT) согласно настоящему описанию.
Фиг. 3 показывает вариант осуществления способа для регулирования положения распределительного вала с помощью исполнительного механизма регулируемой установки фаз кулачкового распределения.
Фиг. 4 показывает график, изображающий ток, прикладываемый к электрическому исполнительному механизму VCT во время различных условий работы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предоставлены способы и системы для регулирования положения распределительного вала двигателя (такого как двигатель, показанный на фиг. 1) с электрической системой регулируемой установки фаз кулачкового распределения (VCT). Конкретнее, положение распределительного вала может регулироваться до целевого начального положения во время останова двигателя при подготовке к первому событию зажигания последующего запуска двигателя. Кроме того, распределительный вал может поддерживаться в целевом начальном положении, например, в пределах диапазона градусов требуемой установки фаз распределения (к примеру, 5 градусов или меньше), когда обратная связь по положению распределительного вала недоступна во время останова двигателя и последующего запуска двигателя. Например, распределительный вал может поддерживаться в целевом начальном положении, когда обратная связь по распределительному валу недоступна, посредством прикладывания заранее заданного тока к электрическому исполнительному механизму VCT (такому как электрические исполнительные механизмы VCT, показанные на фиг. 2), чтобы компенсировать крутящий момент клапанного механизма, который прикладывается к распределительному валу, во время останова двигателя и запуска двигателя. Контроллер может быть выполнен с возможностью выполнять процедуру управления, такую как примерная процедура по фиг. 3, чтобы поддерживать положение распределительного вала в целевом начальном положении, когда обратная связь по положению распределительного вала недоступна во время останова и запуска двигателя. Положение распределительного вала может поддерживаться в целевом начальном положении посредством прикладывания заранее заданных токов (таких как токи, показанные на фиг. 4) к электрическому исполнительному механизму VCT. Таким образом, распределительный вал может предохраняться от ухода от целевого начального положения, когда обратная связь по положению распределительного вала недоступна во время останова двигателя и запуска двигателя.
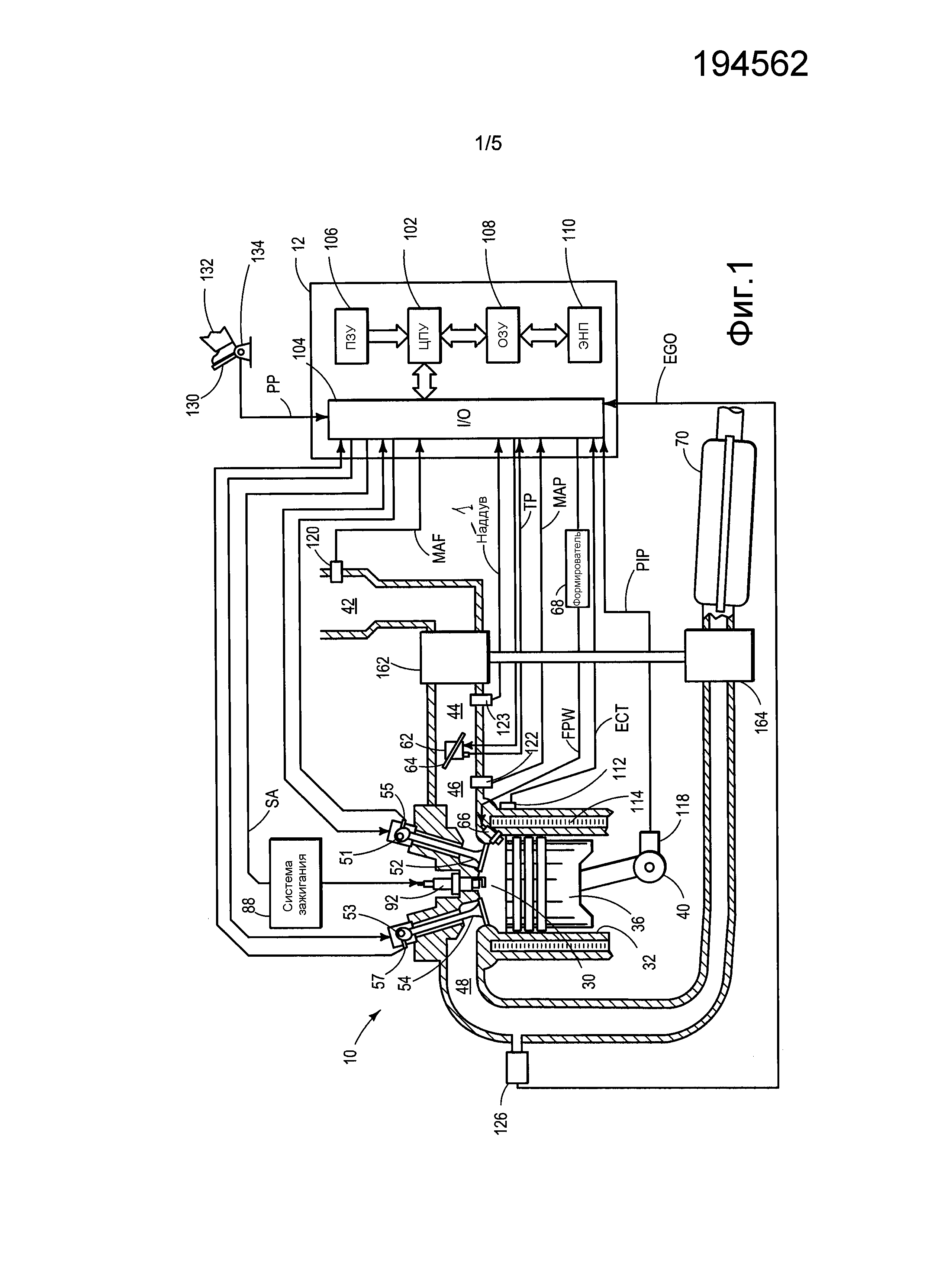
Фиг. 1 - принципиальная схема, показывающая один цилиндр многоцилиндрового двигателя 10, который может быть включен в силовую установку автомобиля. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала РР положения педали. Камера 30 сгорания (также известная как цилиндр) двигателя 10 может включать в себя стенки 32 камеры сгорания с поршнем 36, расположенными в ней. Поршень 36 может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Кроме того, электродвигатель стартера может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10.
Камера 30 сгорания может принимать всасываемый воздух из впускного коллектора 46 через впускной канал 42 и может выпускать газообразные продукты сгорания через выпускной канал 48. Впускной коллектор 46 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания через соответственные впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапана и/или два или более выпускных клапана.
В этом примере, впускной клапан 52 и выпускной клапан 54 могут управляться посредством приведения в действие кулачков через соответственные системы 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из системы переключения профиля кулачков (CPS), системы регулируемой установки фаз кулачкового распределения (VCT), системы регулируемой установки фаз газораспределения (VVT) и/или системы регулируемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Система кулачкового привода, используемая для изменения работы клапанов дополнительно уточнена на фиг. 2. Положение впускного клапана 52 и выпускного клапана 54 может определяться датчиками 55 и 57 положения, соответственно. В альтернативных вариантах осуществления, впускной клапан 52 и/или выпускной клапан 54 могут управляться посредством приведения в действие клапанного распределителя с электромагнитным управлением. Например, цилиндр 30, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством приведения в действие клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT.
Топливная форсунка 66 показана присоединенной непосредственно к камере 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно как непосредственный впрыск топлива в камеру 30 сгорания. Топливная форсунка, например, может быть установлена сбоку камеры сгорания или сверху камеры сгорания. Топливо может подаваться в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую - распределитель топлива. В некоторых вариантах осуществления, камера 30 сгорания, в качестве альтернативы или дополнительно, может включать в себя топливную форсунку, расположенную во впускном коллекторе 46, в конфигурации, которая обеспечивает то, что известно как оконный впрыск топлива во впускное окно выше по потоку от камеры 30 сгорания.
Впускной канал 42 может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере, положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, входящий в состав дросселя 62, конфигурацией, которая обычно указывается как электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие для изменения всасываемого воздуха, подаваемого в камеру 30 сгорания, среди других цилиндров двигателя. Положение дроссельной заслонки 64 может предоставляться в контроллер 12 посредством сигнала TP положения дросселя. Впускной канал 42 может включать в себя датчик 120 массового расхода воздуха и датчик 122 абсолютного давления в коллекторе для выдачи соответственных сигналов MAF и MAP в контроллер 12.
Система 88 зажигания может выдавать искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12, при выбранных рабочих режимах. Хотя показаны компоненты искрового зажигания, в некоторых вариантах осуществления, камера 30 сгорания или одна или более других камер сгорания двигателя 10 могут приводиться в действие в режиме воспламенения от сжатия, с или без свечи зажигания.
Датчик 126 отработавших газов показан присоединенным к выпускному каналу 48 выше по потоку от устройства 70 снижения токсичности отработавших газов. Датчик 126 может быть любым подходящим датчиком для предоставления показания соотношения воздуха отработавших газов/топлива, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, НС, или СО. Устройство 70 снижения токсичности отработавших газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности отработавших газов или их комбинациями. В некоторых вариантах осуществления, во время работы двигателя 10, устройство 70 снижения токсичности отработавших газов может периодически возвращаться в исходное состояние настраивая по меньшей мере один цилиндр двигателя на конкретное топливо/воздушного соотношение.
Двигатель 10 дополнительно может включать в себя компрессионное устройство, такое как турбонагнетатель или нагнетатель, включающий в себя по меньшей мере компрессор 162, расположенный вдоль канала 44 компрессора, который может включать в себя датчик 123 давления наддува для измерения давления воздуха. Что касается турбонагнетателя, компрессор 162 может по меньшей мере частично приводиться в действие турбиной 164, (например, через вал), расположенной вдоль выпускного канала 48. Что касается нагнетателя, компрессор 162 может по меньшей мере частично приводиться в действие двигателем и/или электрической машиной и может не включать в себя турбину. Таким образом, величина компрессии, подаваемой в один или более цилиндров двигателя через турбонагнетатель или нагнетатель, может регулироваться контроллером 12.
Кроме того, в раскрытых вариантах осуществления, система (не показана) рециркуляции отработавших газов (EGR) может направлять требуемую порцию отработавших газов из выпускного канала 48 в канал 44 наддува и/или впускной канал 42 через канал EGR. Величина EGR, выдаваемой в канал 44 наддува и/или впускной канал 42, может регулироваться контроллером 12 посредством клапана EGR. Кроме того, датчик EGR может быть расположен внутри канала EGR и может выдавать показание одного или более из давления, температуры, концентрации отработавших газов.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 110 и шину данных. Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машинно-читаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предугадываются, но специально не перечислены.
Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя (ЕСТ) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя; и сигнал абсолютного давления в коллекторе (MAP) с датчика 122. Сигнал числа оборотов двигателя (RPM) может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время некоторых условий, датчик MAP может давать показание крутящего момента двигателя. Кроме того, этот датчик, наряду с выявленным числом оборотов двигателя и другими сигналами, может давать оценку заряда (включая воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика числа оборотов двигателя, может вырабатывать предопределенное количество равноразнесенных импульсов каждый оборот коленчатого вала.
Как описано выше, фиг. 1 показывает только один цилиндр многоцилиндрового двигателя, и каждый цилиндр может подобным образом включать в себя свой собственный набор впускных/выпускных клапанов, топливную форсунку, свечу зажигания, и т.д. Однако, некоторые или все из цилиндров могут совместно использовать некоторые компоненты, такие как распределительные валы для управления работой клапанов. Таким образом, общий распределительный вал может использоваться для управления работой клапанов для двух или более цилиндров.
Фиг. 2 показывает примерный вариант осуществления двигателя 200, включающий в себя электрическую систему 201 VCT, которая выполнена с возможностью регулировать положение
распределительного вала одного или более распределительных валов двигателя. Двигатель 200 показан имеющим впускной коллектор 204, выполненный с возможностью подавать всасываемый воздух и/или топливо в множество цилиндров 202, и выпускной коллектор 206, выполненный с возможностью выпускать продукты сгорания из множества цилиндров. Поток атмосферного воздуха может поступать в систему впуска через канал 208 всасываемого воздуха. Скорость потока всасываемого воздуха во впускной коллектор 204 может управляться по меньшей мере частично основным дросселем (не показан), расположенным в канале 208 всасываемого воздуха. Каждый из множества цилиндров 202 может обслуживаться одним или более клапанов. В настоящем примере, каждый цилиндр включает в себя соответствующие впускной клапан 210 и выпускной клапан 212. Как конкретизировано ниже, двигатель 200 включает в себя один или более распределительных валов 214 и 216, каждый из которых может приводиться в действие для управления впускными и/или выпускными клапанами множества цилиндров, которые присоединены к общему распределительному валу.
Каждый впускной клапан 210 управляется между открытым положением, которое допускает всасываемый воздух в соответствующий цилиндр, и закрытым положением, по существу блокирующим всасываемый воздух от цилиндра. Впускные клапаны 210 множества цилиндров 202 могут приводиться в действие общим распределительным валом 214 впускных клапанов. Распределительный вал 214 впускных клапанов включает в себя впускные кулачки 218, которые имеют профиль рабочего выступа кулачка для открывания впускных клапанов 210 в течение определенной длительности впуска. В некоторых вариантах осуществления (не показанных), распределительный вал может включать в себя дополнительные впускные кулачки с альтернативным профилем рабочего выступа кулачка, который предоставляет впускным клапанам 210 возможность открываться на альтернативную длительность (что в материалах настоящей заявки также называется системой переключения профиля кулачков). На основании профиля рабочего выступа дополнительного кулачка, альтернативная длительность может быть более продолжительной или более короткой, чем определенная длительность впуска впускного кулачка 218. Профиль рабочего выступа может оказывать влияние на высоту подъема кулачка, длительность кулачка и/или установку фаз кулачкового распределения. Контроллер 220 может иметь возможность переключать длительность впускного клапана, перемещая распределительный вал 214 впускных клапанов в продольном направлении и осуществляя переключение между профилями кулачков. В одном из примеров, контроллер 220 является таким же, как контроллер 12 по фиг. 1.
Таким же образом, каждый выпускной клапан 212 приводится в действие между открытым положением, допускающим выход отработавших газов из соответствующего цилиндра, и закрытым положением, по существу удерживающим газы внутри цилиндра. Выпускные клапаны 212 множества цилиндров 202 могут приводиться в действие общим распределительным валом 216 выпускных клапанов. Распределительный вал выпускных клапанов включает в себя выпускные кулачки 222, которые имеют профиль рабочего выступа кулачка для открывания выпускных клапанов 212 в течение определенной длительности выпуска. В некоторых вариантах осуществления (не показанных), распределительный вал может включать в себя дополнительные выпускные кулачки с альтернативным профилем рабочего выступа кулачка, который предоставляет выпускным клапанам 212 возможность открываться на альтернативную длительность. На основании профиля рабочего выступа дополнительного кулачка, альтернативная длительность может быть более продолжительной или более короткой, чем определенная длительность выпуска выпускного кулачка 222. Профиль рабочего выступа может оказывать влияние на высоту подъема кулачка, длительность кулачка и/или установку фаз кулачкового распределения. Контроллер 220 может иметь возможность переключать длительность выпускного клапана, перемещая распределительный вал 216 выпускных клапанов в продольном направлении и осуществляя переключение между профилями кулачков.
Понятно, что, несмотря на то, что изображенный пример показывает общий распределительный вал 214 впускных клапанов, присоединенный к впускным клапанам каждого цилиндра, и общий распределительный вал 216 выпускных клапанов, присоединенный к выпускным клапанам каждого цилиндра, в альтернативных вариантах осуществления, распределительные валы могут быть присоединены к подмножествам цилиндров, и могут присутствовать многочисленные распределительные валы впускных и/или выпускных клапанов. Например, первый распределительный вал для впускных клапанов может быть присоединен к впускным клапанам первого подмножества цилиндров наряду с тем, что второй распределительный вал для впускных клапанов может быть присоединен к впускным клапанам второго подмножества цилиндров. Подобным образом, первый распределительный вал для выпускных клапанов может быть присоединен к выпускным клапанам первого подмножества цилиндров наряду с тем, что второй распределительный вал для выпускных клапанов может быть присоединен к выпускным клапанам второго подмножества цилиндров. Кроме того еще, один или более впускных клапанов и выпускных клапанов могут быть присоединены к каждому распределительному валу. Подмножество цилиндров, присоединенных к распределительному валу может быть основано на их положении вдоль блока цилиндров, порядке их работы, конфигурации двигателя, и т.д.
В некоторых вариантах осуществления, распределительные валы и ассоциированные компоненты, кроме того, могут взаимодействовать с толкателями клапана, коромыслами клапана, эксцентриками, и т.д., для приведения в действие впускных/выпускных клапанов. Такие устройства и детали могут управлять приводом впускных клапанов 210 и выпускных клапанов 212, преобразуя вращательное движение кулачков в поступательное движение клапанов. Как обсуждено ранее, клапаны также могут приводиться в действие посредством дополнительных профилей рабочего выступа кулачка на распределительных валах, где профили рабочего выступа кулачка между разными клапанами могут обеспечивать меняющуюся высоту подъема кулачка, длительность кулачка и/или установку фаз кулачкового распределения. Однако, альтернативные размещения распределительного вала (на головке блока и/или толкателе клапана) могли бы использоваться, если требуется. Кроме того, в некоторых примерах, каждый из множества цилиндров 202 может иметь более чем один выпускной клапан и/или впускной клапан. Кроме того других примерах, каждый из выпускных клапанов и впускных клапанов одного или более цилиндров может приводиться в действие общим распределительным валом. Кроме того еще, в некоторых примерах, некоторые из впускных клапанов и/или выпускных клапанов могут приводиться в действие своим собственным независимым распределительным валом или другим приводным устройством.
Электрическая система 201 VCT включает в себя электрический впускной исполнительный механизм 224 VCT, присоединенный с возможностью работы к распределительному валу 214 впускных клапанов, а электрический выпускной исполнительный механизм 226 VCT присоединен с возможностью работы к распределительному валу 216 выпускных клапанов. Положение распределительного вала 214 впускных клапанов может регулироваться впускным исполнительным механизмом 224 посредством контроллера 220. Подобным образом, положение распределительного вала 216 выпускных клапанов может регулироваться выпускным исполнительным механизмом 226 посредством контроллера 220. Электрическая система 201 VCT может быть выполнена с возможностью осуществлять опережение или запаздывание установки фаз клапанного распределения, осуществляя опережение или запаздывание установки фаз кулачкового распределения, и может управляться посредством сигнальных шин контроллером 220.
В некоторых вариантах осуществления, электрическая система 201 VCT может быть сдвоенной независимой системой регулируемой установки фаз распределительного вала для изменения установки фаз распределения впускных клапанов и установки фаз распределения выпускных клапанов независимо друг от друга. Например, электрическая система 201 VCT может быть выполнена с возможность поворачивать распределительный вал 214 для впускных клапанов и/или распределительный вал 216 для выпускных клапанов независимо от коленчатого вала, чтобы вызывать установку фаз клапанного распределения с опережением или запаздыванием. В некоторых вариантах осуществления, электрическая система 201 VCT может быть устройством с приводом от крутящего момента кулачков, выполненным с возможностью быстро менять установку фаз кулачкового распределения. В некоторых вариантах осуществления, установка фаз клапанного распределения, такая как закрывание впускного клапана (IVC) и закрывание выпускного клапана (EVC) может меняться посредством устройства непрерывно регулируемого подъема клапана (CVVL).
Устройства и системы управления клапанами/кулачками, описанные выше, могут быть с электрическим приводом, хотя, в некоторых реализациях, по меньшей мере один распределительный вал может регулироваться посредством электрического исполнительного механизма, а другой распределительный вал может регулироваться посредством гидравлического исполнительного механизма. В одном из примеров, положение распределительного вала может изменяться посредством регулирования фаз кулачков электрического исполнительного механизма (например, фазировщика кулачков с электроприводом) с точностью, которая превышает таковую у большинства фазировщиков кулачков с гидравлическим приводом. Сигнальные шины могут отправлять сигналы управления в и принимать измерения установки фаз кулачкового распределения и/или выбора кулачка из электрической системы 201 VCT.
Контроллер 220 может управлять положением распределительного вала для данного распределительного вала на основании замкнутой обратной связи. В одном из примеров, обратная связь по положению распределительного вала может определяться на основании сигнала положения коленчатого вала и сигнала PIP распределительного вала для распределительного вала. Например, электрическая система 201 VCT может быть выполнена с возможностью регулирования положения распределительного вала на основании обратной связи по положению распределительного вала и условий работы, чтобы открывать первый клапан на первую длительность во время первого режима работы. В одном из конкретных примеров, первый режим работы возникает при нагрузке двигателя ниже порогового значения частичной нагрузки двигателя. Кроме того, электрическая система VCT может быть выполнена с возможностью открывать первый клапан в течение второй длительности, более кратковременной, чем первая длительность, во время второго рабочего режима. В одном из конкретных примеров, второй режим работы возникает при нагрузке двигателя выше порогового значения нагрузки и числе оборотов двигателя ниже порогового значения числа оборотов двигателя (например, во время от низких до средних чисел оборотов двигателя).
Такое управление с обратной связью может не быть возможным до тех пор, пока число оборотов двигателя не удовлетворяет минимальному пороговому значению числа оборотов. Более того, частота обновления и разрешение сигнала обратной связи на таких низких числах оборотов могут быть ненадежными. Например, 4-зубое колесо PIP выдает обновленное положение кулачка каждые 180 градусов положения кулачка, которые имеют значение 150 мс при 200 оборотах в минуту. Однако, в некоторых случаях, электрической системе 201 VCT требуется перемещать распределительный вал в целевое положение в пределах 500 мс. Отсутствие обратной связи по положению распределительного вала на низких числах оборотов двигателя может делать управление положением распределительного вала особенно затруднительным во время останова двигателя и запуска двигателя. Кроме того, контроллер 220 может быть выполнен с возможностью регулирования положения распределительного вала до целевого начального положения с помощью электрической системы 201 VCT для первого события зажигания запуска двигателя. В частности, положение распределительного вала может регулироваться из исходного положения в состояние, иное чем положение концевого упора, для того чтобы снижать выбросы питающих газов (FG) во время первого события зажигания.
Отметим, что, поскольку электрическая система 201 VCT питается посредством электричества, электрическая система 201 VCT может регулировать положение распределительного вала на низких числах оборотов двигателя (например, во время останова двигателя), где система VCT с гидравлическим приводом не смогла бы осуществлять такую регулировку.
В одном из примеров, контроллер 220 выполнен с возможностью регулировать положение распределительного вала до целевого начального положения во время останова двигателя на основании обратной связи по положению распределительного вала при подготовке к следующему запуску двигателя. Таким образом, распределительный вал может располагаться точно в целевом начальном положении на основании обратной связи по положению распределительного вала, когда запускается двигатель. Однако, авторы в материалах настоящей заявки увидели, что, поскольку различные механизмы не имеют стопорных штифтов для удерживания распределительного вала на месте, когда нет питания у электрического исполнительного механизма VCT, положение распределительного вала может перемещаться по направлению к подвергнутым запаздыванию положениям вследствие воздействий сопротивления трения во время неуправляемых фаз и не поддерживалось бы в целевом начальном положении для первого события зажигания двигателя. Другими словами, положение распределительного вала может уходить от целевого начального положения в течение периодов в тех случаях, когда обратная связь по распределительному валу недоступна (например, на низких числах оборотов двигателя) для управления по замкнутому контуру электрического исполнительного механизма VCT электрической системы VCT.
В одном из примеров, контроллер 220 включает в себя процессор 228 и машинно-читаемый носитель 230, имеющий команды, которые, когда выполняются процессором: во время останова двигателя, регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, прикладывают первый ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения, а во время запуска до того, как обратная связь по положению распределительного вала становится доступной, прикладывают второй ток к электрическому исполнительному механизму VCT для поддержания целевого начального положения. Посредством прикладывания токов к электрическому исполнительному механизму VCT, когда обратная связь по положению распределительного вала недоступна для управления по замкнутому контуру, исполнительный механизм VCT может регулироваться для противодействия моменту трения клапанного механизма, приложенному к распределительному валу в течение таких неуправляемых фаз во время останова двигателя и запуска двигателя. Таким образом, положение распределительного вала может предохраняться от ухода от целевого начального положения, когда обратная связь по положению распределительного вала недоступна.
В некоторых вариантах осуществления, первый и второй токи являются заранее заданными токами, которые могут быть предопределены для данной конфигурации двигателя посредством измерения крутящего момента клапанного механизма на низких числах оборотов двигателя и со знанием профилей числа оборотов двигателя при запуске и останове, и инерционных нагрузок VCT. Другими словами, первый ток может быть установлен на постоянный уровень тока независимо от условий, и второй ток может быть установлен в постоянный уровень тока независимо от условий.
В других вариантах осуществления, первый и/или второй ток могут меняться от одного события останова и запуска к другому. Например, как только обратная связь по положению распределительного вала становится доступной во время запуска двигателя, если положение распределительного вала находится дальше от целевого начального положения, чем пороговое значение, то, для следующего останова двигателя, один или оба удерживающих уровня тока могут регулироваться, так чтобы положение распределительного вала поддерживалось ближе к целевому начальному положению. Другими словами, токи удержания могут адаптивно изучаться от одного события останова/запуска двигателя к другому событию. В одном из примеров, один или оба из удерживающих токов могут корректироваться как функция температуры охлаждающей жидкости во время останова двигателя и запуска двигателя. В еще одном примере, один или оба из удерживающих токов могут корректироваться как функция температуры масла во время останова двигателя и запуска двигателя. В частности, адаптивное изучение токов удержания может быть функцией обеих температур, останова двигателя и запуска двигателя, так как температуры могут быть разными в зависимости от длительности между остановом двигателя и следующим запуском двигателя.
В некоторых вариантах осуществления, первый и второй ток может определяться экспериментально посредством управления двигателем в заранее заданных условиях низкого числа оборотов и минимальном крутящем моменте для предотвращения запаздывания, и максимальном крутящем моменте для предотвращения опережения распределительного вала. В некоторых вариантах осуществления, первый ток меньше, чем второй ток, так как крутящий момент сил инерции, приложенный к распределительному валу во время запуска двигателя, может быть большим, чем крутящий момент, прикладываемый во время останова двигателя.
В некоторых вариантах осуществления, первый ток может прикладываться в ответ на обратную связь по положению распределительного вала, становящуюся недоступной, пока двигатель вращается во время останова двигателя. В некоторых вариантах осуществления, целевое начальное положение может быть основано на сигнале положения распределительного вала, который выводится из положения коленчатого вала и сигнала PIP распределительного вала.
Отметим, что второй ток может подаваться первым до, во время или непосредственно после того, как двигатель начинает вращение для запуска двигателя. Кроме того, в некоторых вариантах осуществления, второй ток может поддерживаться до тех пор, пока датчики обратной связи не становятся отвечающими требованиям для поддержки управления по замкнутому контуру.
Кроме того, в некоторых вариантах осуществления, машинно-читаемый носитель 230 контроллера 220 дополнительно включает в себя команды, которые, когда выполняются процессором 228: увеличивают ток, прикладываемый к электрическому исполнительному механизму VCT, с первого тока до третьего тока, который является большим, чем первый ток, чтобы компенсировать переходные инерционные нагрузки клапанного механизма во время останова двигателя. Другими словами, заранее. заданный ток может увеличиваться на вспомогательный запас регулирования, для того чтобы компенсировать переходные инерционные нагрузки, которые возникают в момент между указанной командой остановкой двигателя и когда двигатель прекращает вращение. Понятно, что ток может повышаться любым подходящим образом, не выходя из объема настоящего раскрытия. Например, ток может ступенчато повышаться с первого тока до второго тока. В качестве еще одного примера, ток может наращиваться по линейному закону с первого тока до второго тока. Более того, понятно, что ток может регулироваться в любой подходящий момент времени между указанными командой остановом двигателя и остановкой двигателя, не выходя из объема настоящего раскрытия.
Более того, в некоторых вариантах осуществления, машинно-читаемый носитель 230 контроллера 220, кроме того, включает в себя команды, которые, когда выполняются процессором 228: в ответ на обратную связь по положению распределительного вала, становящуюся доступной после запуска двигателя, подтверждают положение распределительного вала и регулируют положение распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения, если распределительный вал не находится в целевом начальном положении. Другими словами, когда обратная связь по положению распределительного вала становится доступной во время запуска двигателя впервые (например, число оборотов двигателя становится большим, чем пороговое значение числа оборотов), точность положения распределительного вала относительно целевого начального положения может подтверждаться. В случае, если распределительный вал не находится в целевом начальном положении или в пределах предопределенного допуска, управление VCT по замкнутому контуру может быстро регулировать положение распределительного вала до целевого начального положения, поскольку распределительный вал вероятно может быть близким к целевому начальному положению. Таким образом, время для достижения целевого начального положения после восстановления управления с обратной связью может существенно сокращаться или, в идеальном случае, уменьшаться до нуля, относительно подходов, которые не прикладывают заранее заданных токов к исполнительным механизмам VCT в течение периодов, где обратная связь по положению распределительного вала недоступна.
В некоторых вариантах осуществления, машинно-читаемый носитель 230 контроллера 220 дополнительно включает в себя команды, которые, когда выполняются процессором 228: прикладывают разные уровни тока к электрическому исполнительному механизму VCT во время разных условий работы двигателя без осуществления сгорания, в том числе останова и немедленно следующего прокручивания коленчатого вала и запуска, пока обратная связь по положению распределительного вала является недоступной. Например, разные токи удержания распределительного вала могут включать в себя первый уровень тока во время понижения вращения и второй, отличный, уровень тока во время прокручивания коленчатого вала. В некоторых реализациях, разные уровни тока могут быть предварительно заданными и постоянными независимо от условий работы. В некоторых реализациях разные уровни тока могут изменяться в ответ на то, является ли двигатель понижающим вращение до состояния покоя или раскручивающимся из состояния покоя. В некоторых реализациях, разные уровни тока могут изменяться в ответ на условия работы. Например, уровни тока могут адаптивно изучаться или регулироваться от одного события останова/запуска двигателя к другому. Уровни тока, например, могут регулироваться на основании температур во время останова и запуска двигателя или другого пригодного рабочего параметра.
Как описано выше, фиг. 2 показывает неограничивающий пример двигателя внутреннего сгорания и ассоциированных систем впуска и выпуска. Следует понимать, что, в некоторых вариантах осуществления, двигатель может иметь большее или меньшее количество цилиндров сгорания, распределительных клапанов, дросселей и компрессионных устройств, среди прочего. Примерные двигатели могут иметь цилиндры, расположенные в «V-образной» конфигурации. Кроме того, первый общий распределительный вал может управлять клапанами для первого набора цилиндров в первом ряду наряду с тем, что второй распределительный вал может управлять впускными клапанами для второго набора цилиндров во втором ряду. То есть, общий распределительный вал системы кулачкового привода (например, электрической системы VCT) может использоваться для управления работой клапанов группы цилиндров. Кроме того, электрическая система VCT может управлять положением одного или более распределительных валов двигателя.
Конфигурации, проиллюстрированные выше, дают различным способам для управления электрической системой VCT возможность поддерживать распределительный вал в требуемом целевом начальном положении для первого события зажигания после запуска двигателя. Соответственно, некоторые такие способы описаны далее, в качестве примера, с постоянной ссылкой на вышеприведенные конфигурации. Однако, будет понятно, что эти способы, и другие, полностью находящиеся в пределах объема настоящего раскрытия, также могут быть возможны с использование других конфигураций.
Фиг. 3 показывает вариант осуществления способа 300 для управления положением распределительного вала с помощью электрического исполнительного механизма VCT или электрической системы VCT. Например, способ может выполняться контроллером 12 по фиг. 1 или контроллером 220 по фиг. 2.
На 302, способ 300 включает в себя определение условий работы. Определение условий работы, например, может включать в себя положение распределительного вала, положение коленчатого вала, число оборотов двигателя, требование крутящего момента, скорость транспортного средства, условия окружающей среды, температуру двигателя, температуру каталитического нейтрализатора отработавших газов, MAP, MAF, и т.д.
На 304, способ 300 включает в себя определение, дана ли команда останова двигателя. Если дана команда останова двигателя, то способ 300 переходит на 306. Иначе, способ 300 возвращается на другие операции.
На 306, способ 300 включает в себя регулирование распределительного вала до целевого начального положения с помощью электрического исполнительного механизма VCT. Например, положение распределительного вала может регулироваться способом с замкнутым контуром на основании обратной связи по положению распределительного вала, которая включает в себя положение коленчатого вала и положение распределительного вала. В одном из примеров, целевое начальное положение основано на сигнале положения распределительного вала.
На 308, способ 300 включает в себя определение, является ли обратная связь по положению распределительного вала доступной, а двигатель вращающимся. В одном из примеров, определение может производиться на основании числа оборотов двигателя, становящегося меньшим, чем пороговое значение числа оборотов. Если обратная связь по положению распределительного вала является доступной, а двигатель вращающимся, то способ 300 переходит на 310. Иначе, способ 300 возвращается на 308.
На 310, способ 300 включает в себя прикладывание первого тока к электрическому исполнительному механизму VCT для поддержания распределительного вала в целевом начальном положении. В одном из примеров, первый ток может прикладываться в ответ на обратную связь по положению распределительного вала, становящуюся недоступной, пока двигатель вращается во время останова двигателя. В некоторых вариантах осуществления, первый ток может подаваться до остановки двигателя.
В некоторых вариантах осуществления, на 312, способ 300 включает в себя увеличение тока, прикладываемого к электрическому исполнительному механизму VCT, с первого тока до третьего тока, который является большим, чем первый ток, чтобы компенсировать переходные инерционные нагрузки клапанного механизма во время останова двигателя. Например, второй ток может иметь значение заранее заданных токов, которые могут быть предопределены для данной конфигурации двигателя посредством измерения крутящего момента клапанного механизма на низких числах оборотов двигателя, со знанием профилей числа оборотов двигателя при останове и инерционных нагрузок системы VCT. В некоторых вариантах осуществления, второй ток может прикладываться временно, и ток может уменьшаться до первого тока. В некоторых вариантах осуществления, второй ток может подаваться до остановки двигателя.
На 314, способ 300 включает в себя определение, дана ли команда запуска двигателя. Если дана команда запуска двигателя, то способ 300 переходит на 316. Иначе, способ 300 возвращается на 314.
На 316, способ 300 включает в себя прикладывание второго тока к электрическому исполнительному механизму VCT для поддержания распределительного вала в целевом начальном положении. В некоторых вариантах осуществления, второй ток может прикладываться до того, как двигатель начинает вращение для запуска двигателя. В некоторых вариантах осуществления, второй ток может прикладываться после, как двигатель начинает вращение для запуска двигателя. В некоторых вариантах осуществления, первый и второй токи идентичны. В некоторых вариантах осуществления, первый ток отличается от второго тока. В некоторых вариантах осуществления, первый ток меньше, чем второй ток.
На 318, способ 300 включает в себя определение, доступна обратная связь по положению распределительного вала. В одном из примеров, определение может производиться на основании числа оборотов двигателя, становящегося большим, чем пороговое значение числа оборотов. Если обратная связь по положению распределительного вала доступна, то способ 300 переходит на 320. Иначе, способ 300 возвращается на 318.
На 320, способ 300 включает в себя подтверждение положения распределительного вала на основании обратной связи по положению распределительного вала.
На 322, способ 300 включает в себя определение, расположен ли распределительный вал в целевом начальном положении. Если распределительный вал не расположен в целевом начальном положении, способ 300 переходит на 324. Иначе, способ 300 возвращается на другие операции.
На 324, способ 300 включает в себя определение, находится ли положение распределительного вала от целевого начального положения дальше, чем пороговое значение. Если положение распределительного вала находится дальше от целевого начального положения, чем пороговое значение, то способ 300 переходит на 326. Иначе, способ 300 переходит на 328.
На 326, способ 300 включает в себя регулирование одного или обоих из первого и второго токов удержания для следующего события останова/запуска двигателя. Токи удержания могут регулироваться посредством адаптивного изучения для более точного поддержания распределительного вала в целевом начальном положении во время следующего события останова/запуска двигателя. В одном из примеров, коррекция тока удержания может быть основана на функции температуры охлаждающей жидкости (или температуры масла) во время останова двигателя и запуска двигателя. Функция может отслеживать температуру в течение как запуска, так и останова двигателя, так как температуры могут отличаться в зависимости от длительностью между остановом и следующим запуском двигателя.
На 328, способ 300 включает в себя регулирование положения распределительного вала с помощью электрического исполнительного механизма VCT до целевого начального положения. Посредством прикладывания заранее заданного тока к исполнительному механизму VCT во время условий, где обратная связь по положению распределительного вала недоступна, вероятность ухода распределительного вала от целевого положения может быть уменьшена. Более того, в случае, если положение не находится в целевом положении или в пределах обозначенного допуска, когда управление VCT с замкнутой обратной связью становится доступным, распределительный вал может быстро регулироваться до целевого положения, поскольку распределительный вал вероятно должен быть близким к целевому положению. Таким образом, время для позиционирования распределительного вала в целевом положении после восстановления управления с обратной связью может существенно сокращаться или, в идеальном случае, уменьшаться до нуля, относительно подходов, которые не прикладывают ток к исполнительным механизмам VCT во время условий, где обратная связь по положению распределительного вала недоступна.
В еще одном варианте осуществления, способ содержит прикладывание разных уровней тока к электрическому исполнительному механизму VCT двигателя во время разных условий работы двигателя без осуществления сгорания, в том числе, останова и немедленного последующего проворачивания коленчатого вала и запуска, пока обратная связь по положению распределительного вала недоступна. В одном из примеров, разные уровни тока включают в себя первый уровень тока во время останова двигателя, где двигатель понижает вращение до состояния покоя, и второй, отличный, уровень тока во время запуска двигателя, где двигатель прокручивает коленчатый вал вплоть до первого события зажигания. В некоторых вариантах осуществления, разные уровни тока могут изменяться в ответ на то, является ли двигатель понижающим вращение до состояние покоя или раскручивающимся из состояния покоя, вследствие разных крутящих моментов сил инерции, приложенных к распределительному валу во время каждого события.
В еще одном варианте осуществления, способ управления исполнительным механизмом VCT содержит, во время останова двигателя, регулирование распределительного вала с помощью исполнительного механизма VCT до целевого начального положения, прикладывание первого удерживающего уровня к исполнительному механизму VCT для поддержания целевого начального положения, а во время запуска двигателя, до того, как становится доступной обратная связь по положению распределительного вала, прикладывание второго удерживающего уровня к исполнительному механизму VCT для поддержания целевого начального положения. В некоторых реализациях, удерживающие уровни могут быть заданы заранее. В некоторых реализациях, удерживающие уровни могут регулироваться на основании условий работы. В одном из примеров, исполнительный механизм VCT является электрическим исполнительным механизмом VCT, а первый удерживающий уровень является первым током, и второй удерживающий уровень является вторым током. В еще одном примере, исполнительный механизм VCT приводится в действие гидравлически, и первый удерживающий уровень является первым гидравлическим давлением, а второй удерживающий уровень является вторым удерживающим давлением. Понятно, что удерживающие уровни могут быть представляющими любой пригодный рабочий параметр VCT, не выходя из объема настоящего раскрытия.
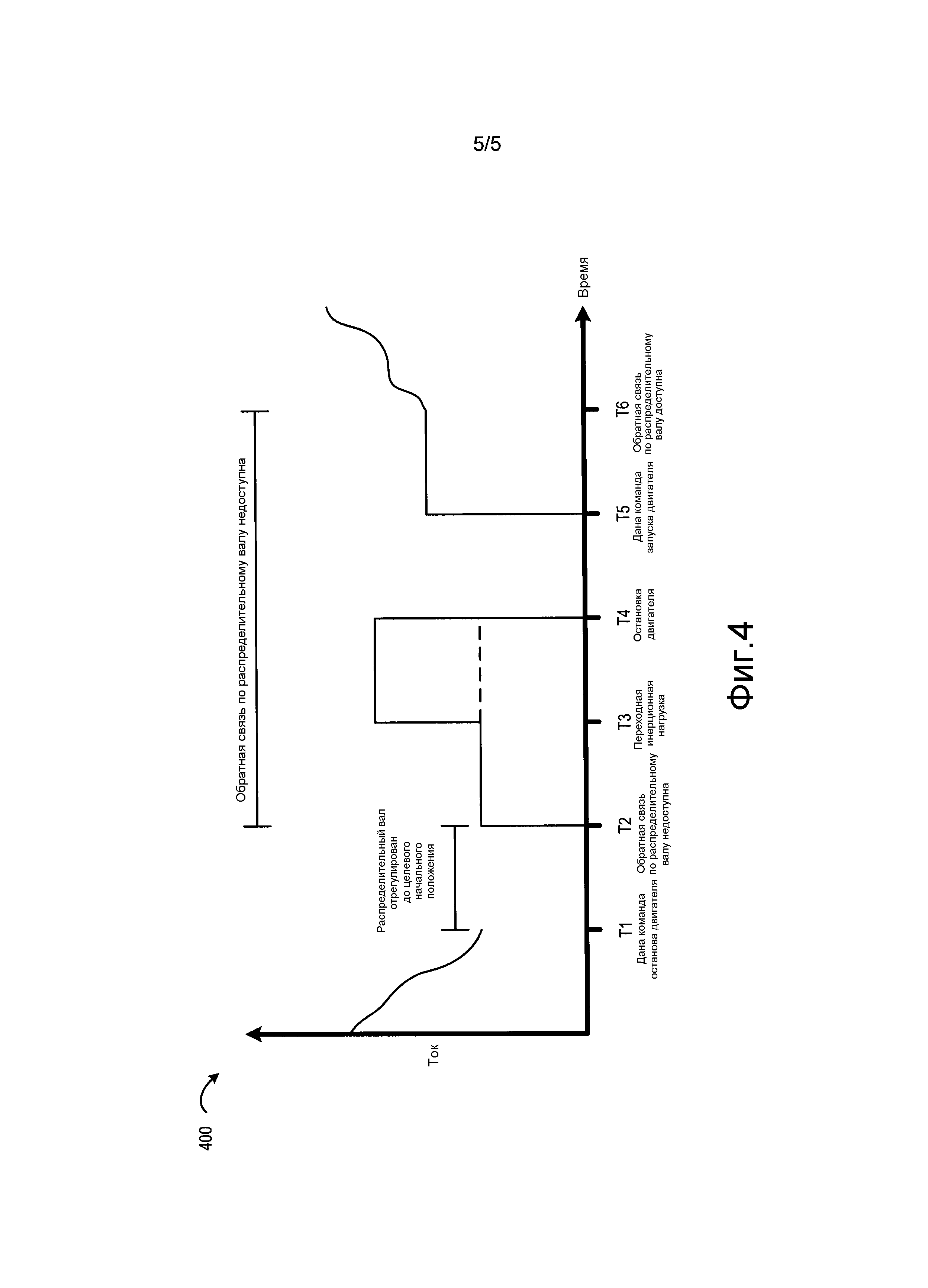
Фиг. 4 показывает график 400, изображающий ток, прикладываемый к электрическому исполнительному механизму VCT во время различных условий работы. График 400 представляет в виде диаграммы ток, прикладываемый к исполнительному механизму VCT для управления положением распределительного вала, в зависимости от времени. Отметим, что, когда обратная связь по распределительному валу доступна, может применяться управление с замкнутой обратной связью положением распределительного вала. Кроме того, понятно, что проиллюстрированное управление с замкнутой обратной связью является всего лишь примером, и может отличаться, без выхода из объема настоящего раскрытия.
В момент Т1 времени, дается команда останова двигателя. В момент Т2 времени, обратная связь по положению распределительного вала становится недоступной вследствие падения числа оборотов двигателя, пока двигатель снижает вращение. В некоторый момент между Т1 и Т2, положение распределительного вала регулируется до целевого начального положения с помощью электрического исполнительного механизма VCT. В ответ на обратную связь по положению распределительного вала, становящуюся доступной, первый ток прикладывается к электрическому исполнительному механизму VCT, чтобы компенсировать крутящий момент клапанного механизма и поддерживать целевое начальное положение. В некоторых вариантах осуществления, первый ток подается до остановки двигателя в момент Т4 времени. В некоторых вариантах осуществления, в момент Т3 времени, ток увеличивается от первого тока до второго тока, чтобы компенсировать переходные инерционные нагрузки. В некоторых вариантах осуществления, второй ток подается до останова двигателя в момент Т4 времени. В момент Т5 времени, дается команда запуска двигателя, и третий ток подается на исполнительный механизм VCT для поддержания целевого начального положения. В проиллюстрированном примере, третий ток является большим, чем первый ток, хотя понятно, что, в некоторых вариантах осуществления, третий ток может быть таким же или меньшим, чем первый ток или второй ток. В некоторых вариантах осуществления, третий ток подается до тех пор, пока обратная связь по положению распределительного вала не становится доступной в момент Т6 времени. Как только обратная связь по положению распределительного вала вновь становится доступной в момент Т6 времени, управление с замкнутой обратной связью распределительным валом возобновляется. Отметим, что обратная связь по положению распределительного вала недоступна в течение длительности между моментом Т2 времени и моментом Т6 времени.
Отметим, что проиллюстрированные первый, второй и третий токи удержания являются всего лишь примерами и могут отличаться, не выхода из объема настоящего раскрытия. Более того, токи удержания могут отличаться от одного события останова/запуска двигателя к другому. Более того, в некоторых реализациях, один или более из токов могут не быть постоянными, как показано. Например, третий ток может меняться, чтобы компенсировать крутящий момент сил инерции во время проворачивания коленчатого вала двигателя.
Понятно, что конфигурации и процедуры, раскрытые в материалах настоящей заявки, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящей заявки.
Последующая формула изобретения подробно указывает некоторые комбинации и подкомбинации, рассматриваемые как новые и неочевидные. Пункты формулы изобретения могут ссылаться на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы изобретения включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой изобретения посредством изменения настоящей формулы изобретения или представления новой формулы изобретения в этой или родственной заявке. Такая формула изобретения, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле изобретения, также рассматривается как включенная в предмет изобретения настоящего раскрытия.
Реферат
Изобретение может быть использовано в двигателях внутреннего сгорания, снабженных механизмами регулируемой установки фаз кулачкового распределения. Способ управления исполнительным механизмом регулируемой установки фаз кулачкового распределения (VCT) заключается в том, что во время останова двигателя (200) регулируют распределительный вал (214), (216) с помощью исполнительного механизма (224), (226) VCT до целевого начального положения. Применяют первый удерживающий уровень к исполнительному механизму (224), (226) VCT для поддержания целевого начального положения. Во время запуска двигателя (200) до того, как обратная связь по положению распределительного вала (214), (216) становится доступной, применяют второй удерживающий уровень к исполнительному механизму (224), (226) VCT для поддержания целевого начального положения. Раскрыты варианты способа управления исполнительным механизмом регулируемой установки фаз кулачкового распределения и двигатель. Технический результат заключается в поддержании распределительного вала в требуемом положении для первого события зажигания в двигателе. 4 н. и 16 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство регулирования фаз газораспределения
Комментарии