Устройство и способ для сбрасывания материала на покрытое водой дно или оборудование - RU2560956C2
Код документа: RU2560956C2
Чертежи



Описание
Настоящее изобретение относится к устройству для сбрасывания материала на покрытое водой дно или оборудование, такое как трубопровод. Изобретение также относится к способу сбрасывания материала на покрытое водой дно или на оборудование, а также к компьютерной программе, содержащей программные инструкции, приспособленные, чтобы выполнять способ.
Текучая среда, такая как, например, нефть или газ, типично транспортируется на большие расстояния по трубопроводам. Для того, чтобы избежать дорогостоящего движения в обход, такие трубопроводы могут прокладываться по дну моря, что позволяет покрывать самое короткое расстояние между двумя местоположениями. Такие трубопроводы должны быть в достаточной мере защищены на всем их протяжении под водой. Пригодный способ для защиты трубопроводов включает сбрасывание (грунтовых) материалов на трубопровод таким образом, что трубопровод фактически закапывается в (грунтовый) материал.
Известное устройство для сбрасывания материала на покрытое водой дно или оборудование, такое как трубопровод, содержит судно, снабженное спускной трубой, через которую материал сбрасывается на покрытое водой дно. Спускная труба перемещается вдоль покрытого водой дна тяговым усилием от судна. Точность передвижения спускной трубы относительно покрытого водой дна типично находятся под управлением рулевого устройства, прикрепленного к нижнему концу спускной трубы. Такое рулевое устройство, также называемое дистанционно управляемым подводным манипулятором или коротко ДУПМ, управляется вручную персоналом судна.
Сбрасывание материалов, таких как, например, бутовый камень на больших глубинах (от 300 до 600 м не являются нетипичными) и, кроме того, также на относительно небольших глубинах на дно моря включает сложности, такие как влияние течений, перемещение судна при сильном ветре и т.д. Поскольку должны быть покрыты большие расстояния, важной является возможность сбрасывания материла в правильном месте (например, сверху трубопровода), а также возможность эффективного сбрасывания, под чем подразумевается, что добиться желаемого профиля покрытого водой дна необходимо как можно быстрее, при этом используя как можно меньше материала.
Следовательно, задача настоящего изобретения заключается в устранении недостатков описанного выше устройства предшествующего уровня техники и обеспечении устройства и способа сбрасывания материала на покрытое водой дно, которое позволит осуществить работу с более высокой эффективностью.
В одном аспекте изобретения соответственно обеспечено устройство для сбрасывания материала на покрытое водой дно или оборудование, такое как трубопровод, причем устройство содержит:
- судно, снабженное спускной трубой, по которой материал сбрасывается на покрытое водой дно;
- рулевое устройство, приспособленное, чтобы управлять движением спускной трубы относительно покрытого водой дна;
- первое средство отслеживания, приспособленное, чтобы отслеживать состояние покрытого водой дна;
- второе средство отслеживания, приспособленное, чтобы отслеживать местоположение рулевого устройства относительно дна; и
- компьютерное средство, приспособленное, чтобы на основе данных, полученных от первого и/или второго средства отслеживания, вырабатывать управляющие сигналы для перемещения рулевого устройства.
Устройство согласно изобретению позволяет быстро и точно сбрасывать материал на покрытое водой дно или оборудование, в соответствии с чем перемещение спускной трубы относительно дна регулируется автоматически в зависимости от фактического местоположения рулевого устройства и фактического состояния дна.
Изобретение также относится к способу для сбрасывания материала на покрытое водой дно или оборудование, такое как трубопровод, причем способ содержит этапы, на которых:
- обеспечивают устройство согласно изобретению;
- сбрасывают материал на покрытое водой дно по спускной трубе судна;
- управляют движением спускной трубы относительно покрытого водой дна рулевым устройством;
- отслеживают состояние покрытого водой дна и местоположение рулевого устройства относительно дна; и
- на основе данных, полученных при этом отслеживании, вырабатывают управляющие сигналы для перемещения рулевого устройства; и
- перемещают рулевое устройство (и спускную трубу) в соответствии с этими управляющими сигналами.
Способ согласно изобретению является чрезвычайно полезным для оптимизации операции сбрасывания вдоль одной линии сбрасывания, т.е. в варианте осуществления, когда само судно перемещается линейным образом. Способ изобретения по существу устраняет неустойчивость, связанную с действием человека, за счет обеспечения контура регулирования, в котором движение рулевого устройства (и, следовательно, также движение спускной трубы, а, в частности, движение ее выпускного отверстия) управляется как функция его фактического местоположения и фактического состояния дна.
В дополнительном аспекте изобретения обеспечено устройство, в котором компьютерное средство приспособлено, чтобы вырабатывать управляющие сигналы для перемещения рулевого устройства таким образом, что критерий оптимальности минимизируется. Критерий оптимальности может быть выбран по усмотрению. В особенно подходящем устройстве критерий оптимальности содержит разницу между фактическим состоянием дна, в качестве измеренного первым средством отслеживания, и желаемым состоянием дна.
Желаемое состояние дна типично определяется перед началом операции сбрасывания и предпочтительно касается его глубинного профиля. Например, когда необходимо защитить трубопровод засыпкой его (грунтовым) материалом, желаемый профиль будет типично представлять собой полосу материала конкретной ширины и высоты относительно естественного покрытого водой дна, следующую в направлении трубопровода. Желаемая глубина до полосы сброшенного материала в этом примере является меньшей, чем глубина естественного дна. Состояние покрытого водой дна и, в частности, его глубинный профиль может быть определен заранее известными технологиями, такими как батиметрия. Глубинный профиль дна в течение сбрасывания измеряется первым средством отслеживания.
В другом аспекте изобретения обеспечено устройство, в котором средство отслеживания содержит ультразвуковую и/или оптическую камеру. Такое первое средство отслеживания предпочтительно предусматривается на нижнем конце спускной трубы и/или на рулевом устройстве таким образом, что расстояние до покрытого водой дна не является большим. С этой целью рулевое устройство может быть снабжено удлиненными конструкциями, такими как крылья, до 5 метров или больше, переносящими первое средство отслеживания. Ультразвуковая и/или оптическая камера способна локально измерять глубинный профиль покрытого водой дна перед, во время или после того, как материалы были сброшены на покрытое водой дно. По сути средства, такие как ультразвуковая и оптическая камера, являются известными. Особенно предпочтительная камера представляет собой многолучевую камеру, доступную от Reson®.
Второе средство отслеживания приспособлено, чтобы отслеживать местоположение рулевого устройства (и, следовательно, также спускной трубы, а, в частности, ее нижнего конца, где расположено ее выпускное отверстие) относительно дна. Таким образом, перемещение судна и/или рулевого устройства может быть связано с состоянием покрытого водой дна, выявленного обследованием, причем такое состояние по меньшей мере включает глубинный профиль дна. На самом деле обследование, выполняемое перед фактическим началом операции сбрасывания, дает в результате исходный глубинный профиль естественного покрытого водой дна и незащищенного оборудования, такого как трубопровод. После прохождения спускной трубы и приобретения знаний о количестве сброшенного (грунтового) материала может быть вычислена новая локальная глубина. За счет отслеживания местоположения судна получают обновленный глубинный профиль. В предпочтительном аспекте изобретения обеспечивается устройство, в котором второе средство отслеживания содержит глобальную систему позиционирования.
В еще одном другом аспекте изобретения обеспечено устройство, содержащее дополнительное средство отслеживания, приспособленное, чтобы измерять расход материала, переданного по спускной трубе, и/или скорость судна. При объединении измеренного расхода (в тоннах/мин) со скоростью судна (в м/мин) для такого устройства может быть легко получена масса материала, сброшенного на каждый метр (в тоннах/м).
В предпочтительном способе согласно изобретению количество сброшенного материала на каждый метр перемещения рулевого устройства остается по существу постоянным. В другом предпочтительном способе количество сброшенного материала на каждый метр перемещения рулевого устройства по существу остается постоянным за счет регулирования расхода материала из спускной трубы относительно скорости судна.
В еще одном другом аспекте изобретения устройство содержит устройство ввода/вывода, приспособленное, чтобы передавать сигналы от первого и/или второго, и/или дополнительного средства отслеживания к компьютерному средству.
В еще одном другом аспекте изобретения устройство содержит блоки отображения, приспособленные, чтобы отображать местоположение рулевого устройства, судна и/или состояние дна, в частности его глубинный профиль. В этом случае оператор спускной трубы судна способен наблюдать за операцией сбрасывания и ее развитием.
Вышеприведенные и другие объекты, признаки и преимущества настоящего изобретения станут очевидными из последующего описания и прилагаемой формулы изобретения, рассмотренных в связи с прилагаемыми чертежами, на которых:
На фиг.1 схематично показана часть сбрасывающего судна, снабженного спускной трубой согласно изобретению;
На фиг.2 схематично показан детализированный вид рулевого устройства, смонтированного на нижнем конце спускной трубы;
На фиг.3 схематично показана блок-схема устройства согласно варианту осуществления изобретения;
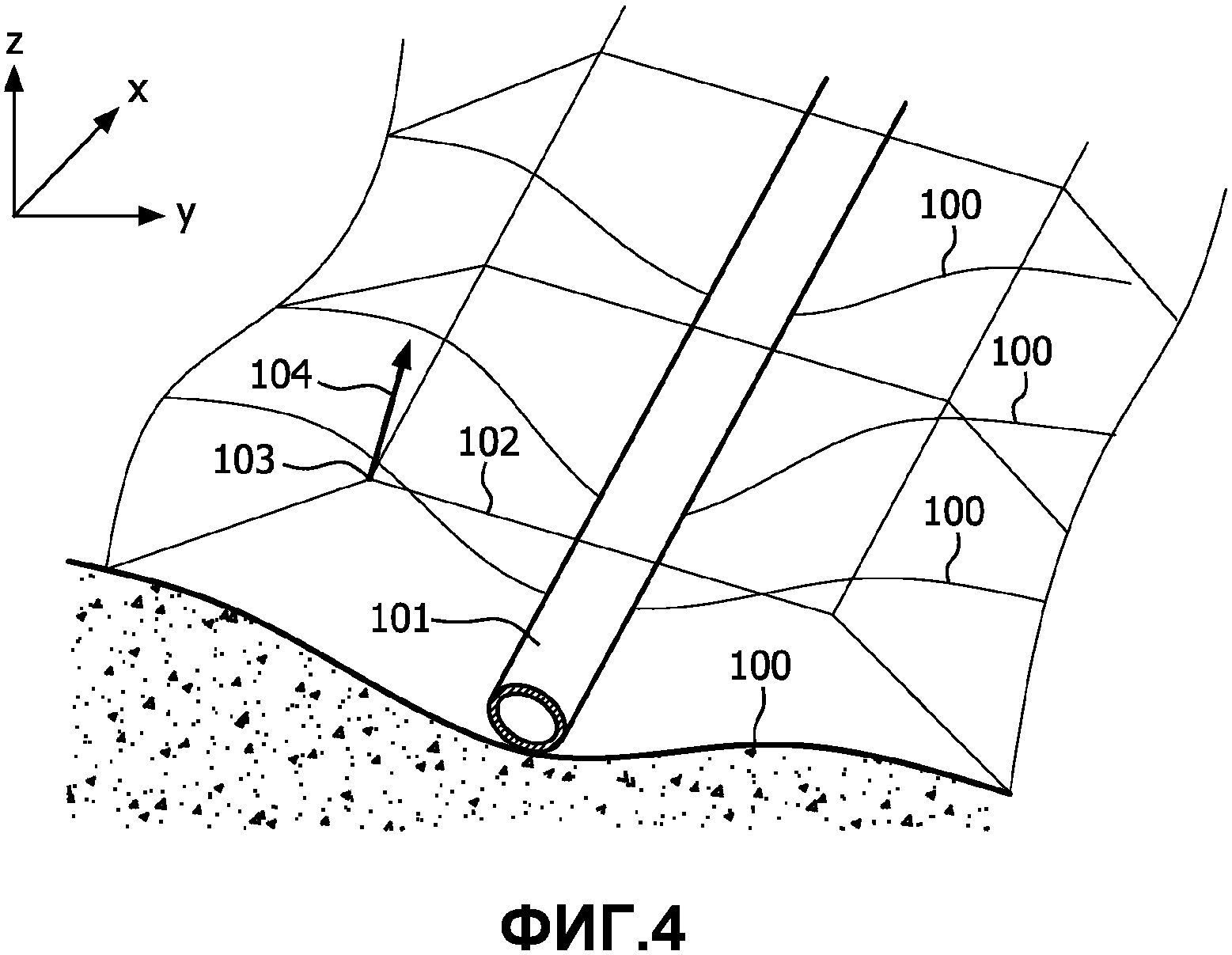
На фиг.4 схематично проиллюстрирован процесс выполнения способа согласно изобретению; и
На фиг.5 схематично проиллюстрирован возможный процесс при поперечном сечении объектов на фиг.4.
Обращаясь к фиг.1, показано сбрасывающее судно 1. Судно 1 снабжено спускной трубой 2, которая проходит от палубы судна 1 через корпус судна 1 по направлению к покрытому водой дну. Над палубой предусмотрено несколько ворот 3, которые посредством тросов 4 переносят рулевое устройство 5. Рулевое устройство 5 образует нижний конец спускной трубы 2 и снабжено приводящим средством в форме двигателей 6, посредством которых рулевое устройство 5 и, следовательно, также нижний конец спускной трубы 2 может перемещаться в направлениях, которые по существу являются перпендикулярными продольной оси спускной трубы 2. Фактическая спускная труба 2 содержит последовательность трубчатых, а более точно цилиндрических трубопроводных элементов 7, устанавливаемых друг на друга и поддерживаемых двумя или, возможно, несколькими тросами 10. Оба конца цилиндрического трубопроводного элемента 7 выполнены с возможностью подгонки к соответствующему концу примыкающего цилиндрического элемента 7. Каждый цилиндрический трубопроводный элемент 7 на его обоих концах демонстрирует направленные наружу опорные фланцы (8, 9). Если необходимо, кольцевое пространство между опорными фланцами (8, 9) двух примыкающих трубопроводных элементов 7 может быть снабжено упругим уплотнением (не показано) в форме отдельного резинового кольца или полимерной внутренней облицовки трубопроводного элемента 7 в качестве поверхности, опирающейся на примыкающий элемент 7. Таким образом, спускная труба 2 обеспечена определенной упругостью для поглощения ударов и т.п., а, более того, предотвращает вхождение большого количества воды внутрь спускной трубы 2. Таким образом, вся конструкция спускной трубы 2 образована различными цилиндрическими элементами 7. Эти элементы 7 зажаты по всей длине спускной трубы 2 между двумя тросами 10, которые, более точно, прикреплены к самому нижнему элементу спускной трубы 2. Из-за собственного веса различных элементов эти элементы лежат друг на друге таким образом, что между различными элементами не требуется обременительных соединений.
Самый нижний конец спускной трубы 2 снабжен рулевым устройством 5, также называемым дистанционно управляемым подводным манипулятором или ДУПМ. Дистанционно контролируемое рулевое устройство 5 содержит центральный спускной желоб 16, который телескопическим образом смонтирован в отношении самого нижнего элемента 7 спускной трубы 2, и через который материал может быть сброшен на покрытое водой дно. Посредством тросов 4 вертикальная качка судна может быть компенсирована таким образом, чтобы рулевое устройство 5 находилось на постоянном расстоянии от покрытого водой дна. Рулевое устройство 5 снабжено складывающимися удерживающими рычагами 18, которые могут удлиняться на расстояние до 5 м и дальше, а также снабжено средством отслеживания в форме ультразвуковых и/или оптических датчиков и/или камер. Для управления движением рулевого устройства 5 и, следовательно, для корректировки позиционирования нижнего конца спускной трубы 2 на рулевом устройстве предусмотрены приводящие средства в форме маневровых двигателей 6. Перемещение рулевого устройства 5 управляется компьютерным средством, как более подробно будет описано ниже.
Для того, чтобы сбрасывать материал, такой как, например, песок или бутовые камни на покрытое водой дно, упомянутый материал, запасенный в хранилищах судна 1, транспортируется посредством конвейера 12 к верхнему концу спускной трубы 2 и сбрасывается в нее, побуждая упомянутый материал падать по спускной трубе 2 и спускному желобу 16 для достижения дна.
Обращаясь к фиг.3, устройство согласно изобретению оборудовано первым средством (17, 30, 35) отслеживания, приспособленным, чтобы отслеживать состояние покрытого водой дна, а, в частности, глубинный профиль дна, и вторым средством 32 отслеживания, приспособленным, чтобы отслеживать местоположение рулевого устройства 5 и/или судна 1 относительно дна. Показанный вариант осуществления устройства также содержит дополнительное средство 31 отслеживания, приспособленное, чтобы измерять расход материала, переданного по спускной трубе 2, и/или скорость судна 1, и компьютерное средство, приспособленное, чтобы на основе данных (34, 39, 40), полученных от первого, второго и также предпочтительно дополнительного средства (17,30,35,32,31) отслеживания, вырабатывать управляющие сигналы 42 для перемещения рулевого устройства 5. Передача сигналов от средства отслеживания к компьютерному средству может быть выполнена посредством проводов (не показаны) и/или беспроводным образом.
Первое средство (17, 30,35) отслеживания содержит некоторое количество ультразвуковых и/или оптических датчиков или камер (17 см фиг.2), смонтированных в нескольких местоположениях на рулевом устройстве 5, а, в частности, на его рычагах 18. Сигналы 34, сгенерированные ультразвуковыми и/или оптическими датчиками 17, передаются посредством подходящего устройства 35 ввода/вывода к первому блоку 30 обработки первого средства отслеживания, содержащему по меньшей мере память для хранения сигнальных данных глубинного профиля. В случае надобности глубинный профиль дна может быть визуализирован для оператора спускной трубы 2 и/или судна 1 на дисплее 40.
Второе средство (32, 36) отслеживания, приспособленное, чтобы отслеживать местоположение рулевого устройства и/или судна 1 относительно дна, содержит по существу известную систему динамического позиционирования/динамического слежения (ДП/ДС), устройство 36 ввода/вывода, приспособленное, чтобы передавать сигналы местоположения от второго средства отслеживания, а также сигналы от дополнительного средства отслеживания к компьютерному средству 33, и некоторое количество датчиков (не показаны) местоположения рулевого устройства и/или судна. Система 32 ДП/ДС позволяет оператору спускной трубы в оперативном режиме видеть на устройстве 38 отображения схему глубинного профиля дна. Такой профиль получают за счет ввода батиметрических данных, заранее полученных в системе ДП/ДС. Глубинный профиль дна обновляется в реальном масштабе времени в результате работы по сбрасыванию. Система 32 ДП/ДС также содержит глобальную систему позиционирования, дающую возможность определить глобальное местоположение судна 1 и/или рулевого устройства 5. Когда спускная труба 2 управляется вручную посредством рулевого устройства 5, оператор главным образом полагается на вышеприведенный набор оборудования отслеживания. Поскольку работа оператора осуществляется ниже уровня воды, видимость рулевого устройства 5 и спускной трубы является плохой. Следовательно, оператору в реальном режиме времени необходимо полагаться на визуализацию местоположения судна 1 и, в особенности, рулевого устройства 5 и визуализацию дна, обеспеченного первым средством (30, 35) отслеживания. При объединении этой информации с сигналом глобальной системы позиционирования от системы 32 ДП/ДС может быть получена визуализация местоположения рулевого устройства 5 в отношении глубинного профиля дна в реальном масштабе времени.
Согласно изобретению дополнительное средство 31 отслеживания приспособлено, чтобы измерять расход материала, переданного по спускной трубе 2, и/или скорость судна 1, и содержит некоторое количество по существу известных датчиков расхода и/или скорости (не показанных), помещенных в спускную трубу 2 и на судно 1. Сигналы (39, 40) расхода и скорости, происходящие от датчиков, передаются посредством устройства 36 ввода/вывода к компьютерному средству (31, 33) для дальнейшей обработки. В случае надобности может быть предусмотрен блок 41 отображения, приспособленный для отображения сигналов (39, 40) расхода и/или скорости.
Компьютерное средство 33 приспособлено, чтобы на основе данных 34, полученных от первого средства (17, 30,35) отслеживания и/или второго средства (32, 36) отслеживания, а также на основе данных (39, 40), полученных от дополнительного средства 31 отслеживания, вырабатывать управляющие сигналы 42 для перемещения рулевого устройства 5. Управляющие сигналы 42, генерируемые компьютерным средством 33, также могут быть отображены на блоке 41 отображения.
Далее более подробно разъяснен вариант осуществления для изобретенного способа сбрасывания материала на покрытое водой дно или оборудование и использование устройства, описанного выше. Типично обследование глубинного профиля дна выполняется за счет приема батиметрических данных и сохранения их в системе 32 ДП/ДС. Этот этап приносит информацию, относящуюся к глубинному профилю 100 покрытого водой дна, а также к местоположению покрытого водой оборудования, такого как трубопровод 101, как показано на фиг.4 на виде в перспективе. Трубопровод 101 локально проходит в направлении х, перпендикулярном локальным перекрестным направлениям (y, z). Трубопровод 101 не должен проходить линейным образом (как показано), а может быть, например, изогнутым. Желаемый глубинный профиль предварительно известен и показан на фиг.4 и 5 в качестве глубинного профиля 102. Материал, сбрасываемый спускной трубой 2, в целом будет накапливаться на дне в виде куч (102a, 102b,...), проходящих в направлении перемещения судна 1. Следовательно, желаемого глубинного профиля 102 можно приближенно добиться некоторым количеством куч (102a, 102b,...), как показано на разрезе фигуры 5. Обратим внимание на то, что размеры куч (102a, 102b,...) могут отличаться вдоль продольного направления трубопровода 101, т.е. для различных координат х.
Затем судно 1 снабжается спускной трубой 2, и рулевое устройство 2 переносится в подходящее начальное местоположение, и спускная труба 2 опускается в области трубопроводной линии 101, которая должна быть защищена, например, в местоположение 105 сбоку, как показано на фиг.5. Затем судно 1 приводится в движение в направлении х со скоростью v, посредством чего материал сбрасывается через спускную трубу 2 с расходом Q. Мгновенное направление 104 судна 1 в целом будет отклоняться от желаемого направления, например, из-за локальных течений. Согласно изобретению это отклонение автоматически корректируется за счет перемещения рулевого устройства 5 (а, следовательно, выходного конца спускной трубы 2) на ту же самую величину Δy в противоположном направлении (см. фиг.5) таким образом, что выходной конец спускной трубы остается в желаемом расположении 103. Линия 103 желаемого расположения проходит в направлении х и, например, следует линии 101 изгиба трубопровода, чтобы оставаться на одном и том же расстоянии от линии 101 трубопровода. Управляющие сигналы для перемещения рулевого устройства 5 вырабатываются компьютерным средством 33 на основе входных данных от первого, второго и дополнительно средств (17, 30, 35, 32, 36,31) отслеживания, которые содержат по меньшей мере мгновенные сигнальные данные о глубинном профиле дна и данные позиционирования рулевого устройства и/или судна 1 относительно дна, и, следовательно, критерий оптимальности минимизируется. Критерий оптимальности в данном примере представляет собой разницу между фактическим глубинным профилем дна (начальный глубинный профиль является профилем 100), измеренным ультразвуковыми и/или оптическими датчиками, присутствующими на рулевом устройстве 5, и желаемым глубинным профилем дна. В начале операции сбрасывания в этом специфичном примере разница между фактическим и желаемым профилем представлена и приближена набором куч (102a, 102b,...). После того, как некоторое количество материала было сброшено, конечно, происходит изменение.
Минимизирование разницы в этом примере включает сбрасывание материала соразмерно с кучей 102а в направлении х на протяжении конкретного расстояния, а затем возвращение в направлении х для того, чтобы насыпать кучи 102b и т.д. Когда количество сброшенного материала на каждый метр перемещения рулевого устройства 5 в направлении х остается по существу постоянным, результатом будет куча (102a, 102b,...) по существу с одинаковым поперечным сечением А. Однако поперечное сечение А может быть изменено за счет варьирования количества сбрасываемого материала на каждый метр при х-перемещении. Это может быть выполнено либо за счет варьирования расхода Q и/или за счет варьирования скорости v судна.
Глубинный профиль покрытого водой дна и местоположение рулевого устройства 5 относительно дна постоянно отслеживаются, а также расход Q через спускную трубу и скорость v судна, и эти данные подаются к компьютерному средству 33 для вырабатывания на основе данных, полученных при отслеживании, управляющих сигналов для перемещения рулевого устройства. Управляющие сигналы приводят маневровые двигатели 6 в соответствующем направлении таким образом, что рулевое устройство 5 (и спускная труба 2) перемещаются в оптимальном направлении Δy.
Желаемый профиль сбрасывания зависит от множества свойств, таких как устойчивость находящегося под водой дна и реологические свойства сбрасываемого материала. Другие факторы, которые являются важными, включают устойчивость судна, позиционное регулирование, характер приливов-отливов, течений воды и т.д. Устройство согласно изобретению позволяет принимать во внимание основную часть этих параметров за счет обеспечения системы управления по замкнутому контуру, причем данные местоположения и глубинного профиля объединяются для выработки оптимальных управляющих сигналов для перемещения рулевого устройства. Изобретение не ограничено выбором конкретного критерия оптимальности и может в действительности использовать любой критерий, который является полезным.
Изобретение не ограничено каким-либо оптимизационным алгоритмом и может быть использовано множество алгоритмов. Подобные алгоритмы обычно известны специалистам в данной области техники, и они обычно минимизируют некоторую функцию f(x) при условии, что h(x)≥0. В настоящем варианте осуществления функция f(x) содержит разницу между фактическим и желаемым глубинным профилем покрытого водой дна вдоль направления перемещения судна. Условие h(x)≥0 может, например, содержать условие, что глубина h(x) спускной трубы 2 не может быть большей, чем конкретная глубина h1, которая является фактической глубиной до покрытого водой дна. Тогда условие превращается в h(x)-h1≥0 (когда глубины задаются отрицательными числами). Схема оптимизации инициируется выбором начальных значений для х и вычислением направлений поиска Δx, используя алгоритмы численного решения, такие как хорошо известный метод Ньютона. Затем выполняется шаг к новой точке, и вычисления повторяются, пока не будет найден минимум. В контексте настоящего изобретения выходным результатом схемы оптимизации является следующее перемещение рулевого устройства 5 спускной трубы 2, представляющее собой горизонтальное, а иногда также вертикальное ее перемещение, а также скорость перемещения. Таким образом, возможно максимизировать производительность и получить более однородное качество. Способ и устройство согласно изобретению также постоянно обновляют данные глубинного профиля, ранее полученные из батиметрических данных.
Вышеприведенное раскрытие было изложено лишь для иллюстрации изобретения и не предназначено для его ограничения. Поскольку специалистам в данной области техники могут представиться модификации раскрытых вариантов осуществления, включающие характер и сущность изобретения, изобретение должно быть истолковано как включающее все из объема прилагаемой формулы изобретения и ее эквивалентов.
Реферат
Изобретение относится к устройству для сбрасывания материала на покрытое водой дно или оборудование, такое как трубопровод. Устройство содержит судно (1), снабженное спускной трубой (7), по которой материал сбрасывается на покрытое водой дно; рулевое устройство (5), приспособленное, чтобы управлять движением спускной трубы относительно покрытого водой дна; первое средство (30) отслеживания, приспособленное, чтобы отслеживать состояние покрытого водой дна; второе средство (32) отслеживания, приспособленное, чтобы отслеживать местоположение рулевого устройства относительно дна; и компьютерное средство, приспособленное, чтобы на основе данных, полученных от первого и/или второго средства отслеживания, вырабатывать управляющие сигналы для перемещения рулевого устройства. Изобретение также относится к способу по сбрасыванию материала на покрытое водой дно или оборудование, используя изобретенное устройство. Технический результат заключается в повышении эффективности работы устройства для сбрасывания материала на покрытое водой дно или оборудование. 2 н. и 15 з.п. ф-лы, 5 ил.
Формула
- судно, снабженное спускной трубой, по которой материал сбрасывается на покрытое водой дно;
- рулевое устройство, предназначенное для управления перемещением спускной трубы относительно покрытого водой дна;
- первое средство отслеживания, предназначенное для отслеживания состояния покрытого водой дна;
- второе средство отслеживания, предназначенное для отслеживания местоположения рулевого устройства относительно дна; и
- компьютерное средство, приспособленное, чтобы на основе данных, полученных от первого и/или второго средства отслеживания, вырабатывать управляющие сигналы для перемещения рулевого устройства.
- обеспечивают устройство по любому из пп. 1-10;
- сбрасывают материал на покрытое водой дно по спускной трубе судна;
- управляют движением спускной трубы относительно покрытого водой дна рулевым устройством;
- отслеживают состояние покрытого водой дна и местоположение рулевого устройства относительно дна; и
- на основе данных, полученных при этом отслеживании, вырабатывают управляющие сигналы для перемещения рулевого устройства; и
- перемещают рулевое устройство и спускную трубу в соответствии с этими управляющими сигналами.
Комментарии