Система синхронного ременного привода - RU2418960C2
Код документа: RU2418960C2
Чертежи









Описание
Область техники, к которой относится изобретение
Изобретение относится к системе синхронного ременного привода, а более конкретно - к системе, имеющей округлую звездочку.
Уровень техники
Широкое разнообразие автомобильных и промышленных двигателей внутреннего сгорания обычно основано на системе синхронного ременного привода для передачи крутящего момента от ведущей звездочки на коленчатом валу к ведомой звездочке, например, на распределительном валу. Распределительные валы создают колебания, которые могут неблагоприятным образом повлиять на срок службы двигателя и синхронного ремня. В частности, приведение в действие впускных и выпускных клапанов посредством контакта с кулачками распределительного вала вызывает передачу через синхронный ремень нагрузки, создаваемой крутящим моментом, с циклическими колебаниями.
Известные попытки уменьшения колебаний нагрузок, создаваемых крутящим моментом, включают в себя использование демпферов распределительного вала, а также демпфированных устройств для натяжения ремня.
В известных технических решениях раскрыто использование некруглых (овальных) звездочек для регулирования сильно изменяющихся крутящих моментов, что, например, предложено инженером Egbert Frenke в отчете о выполнении работ VDI №272 «Неравномерные приводы ременной передачи».
Другие попытки включают в себя использование ротора, имеющего овальный, а не круглый профиль, содержащий, по меньшей мере, два выступа, чередующихся с опускающимися участками. Вращательный нагрузочный узел передает крутящий момент, создающий нагрузку, с периодическими колебаниями, когда его приводят во вращение, при котором угловые положения выступающих и опускающихся участков некруглого профиля относительно углового положения второго ротора и их величина существенно сокращают попеременные натяжения ремня, вызываемые создающим нагрузку, колеблющимся крутящим моментом вращательного узла.
Иллюстрацией имеющегося уровня техники является патент США 7044875, в котором раскрыты синхронное приводное устройство и способ, при этом устройство содержит множество роторов, составляющее, по меньшей мере, первый и второй роторы. Первый ротор имеет множество зубцов для зацепления с зацепными участками удлиненной приводной конструкции, и второй ротор имеет множество зубцов для зацепления с зацепным участком удлиненной приводной конструкции. Ко второму ротору присоединен вращательный нагрузочный узел. Удлиненная приводная конструкция входит в зацепление вокруг первого и второго роторов. Первый ротор предназначен для привода удлиненной приводной конструкции, а второй ротор предназначен для его привода удлиненной приводной конструкцией. Один из роторов имеет некруглый профиль, содержащий, по меньшей мере, два выступающих участка, чередующихся с опускающимися участками. Вращательный нагрузочный узел выполнен таким образом, чтобы передавать периодически колеблющийся крутящий момент, создающий нагрузку, когда этот узел приводят во вращение, при этом угловые положения выступающих и опускающихся участков некруглого профиля относительно углового положения второго ротора, а также величина эксцентриситета некруглого профиля таковы, что некруглый профиль прилагает ко второму ротору противоположный колеблющийся корректирующий момент, который уменьшает или фактически устраняет колебания нагрузочного крутящего момента вращательного нагрузочного агрегата.
Необходима ременная система привода со звездочкой, содержащая округлую звездочку, имеющую зубчатую поверхность и, по меньшей мере, один линейный участок, расположенный между двумя круглыми участками, при этом круглые участки имеют постоянный радиус, а линейный участок имеет длину, которая связана с амплитудой колебаний крутящего момента.
Сущность изобретения
Основной аспект изобретения заключается в создании ременной системы привода со звездочкой, содержащей округлую звездочку, имеющую зубчатую поверхность и, по меньшей мере, один линейный участок, расположенный между двумя круглыми участками, при этом круглые участки имеют постоянный радиус, а линейный участок имеет длину, которая связана с амплитудой колебаний крутящего момента.
Другие аспекты изобретения будут указаны или будут очевидны из последующего описания изобретения и из прилагаемых чертежей.
Изобретение предлагает систему синхронного ременного привода, содержащую округлую звездочку, имеющую зубчатую поверхность и, по меньшей мере, один линейный участок, расположенный между двумя дугообразными участками, при этом дугообразные участки имеют постоянный радиус, а линейный участок имеет заданную длину, вторую звездочку, имеющую зубчатую поверхность и находящуюся в зацеплении с округлой звездочкой посредством бесконечного зубчатого элемента, причем вторая звездочка соединена с вращательной нагрузкой, имеющей циклические колебания крутящего момента, при этом линейный участок округлой звездочки расположен так, чтобы обеспечить изменение длины ремня между звездочками таким образом, что фактически будут устранены чередующиеся натяжения ремня, вызываемые циклическими колебаниями крутящего момента.
Округлая звездочка предпочтительно прикреплена к коленчатому валу двигателя.
Вторая звездочка предпочтительно соединена с распределительным валом двигателя.
Округлая звездочка предпочтительно дополнительно содержит второй линейный участок.
Округлая звездочка предпочтительно дополнительно содержит по меньшей мере, три линейных участка, при этом каждый линейный участок расположен между двумя дугообразными участками, каждый из которых имеет постоянный радиус.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в описание и образуют его часть, иллюстрируют предпочтительные варианты осуществления настоящего изобретения и совместно с описанием служат для пояснения принципов изобретения.
На фиг.1 представлен боковой вид округлой звездочки.
На фиг.2 представлен боковой вид альтернативного варианта звездочки.
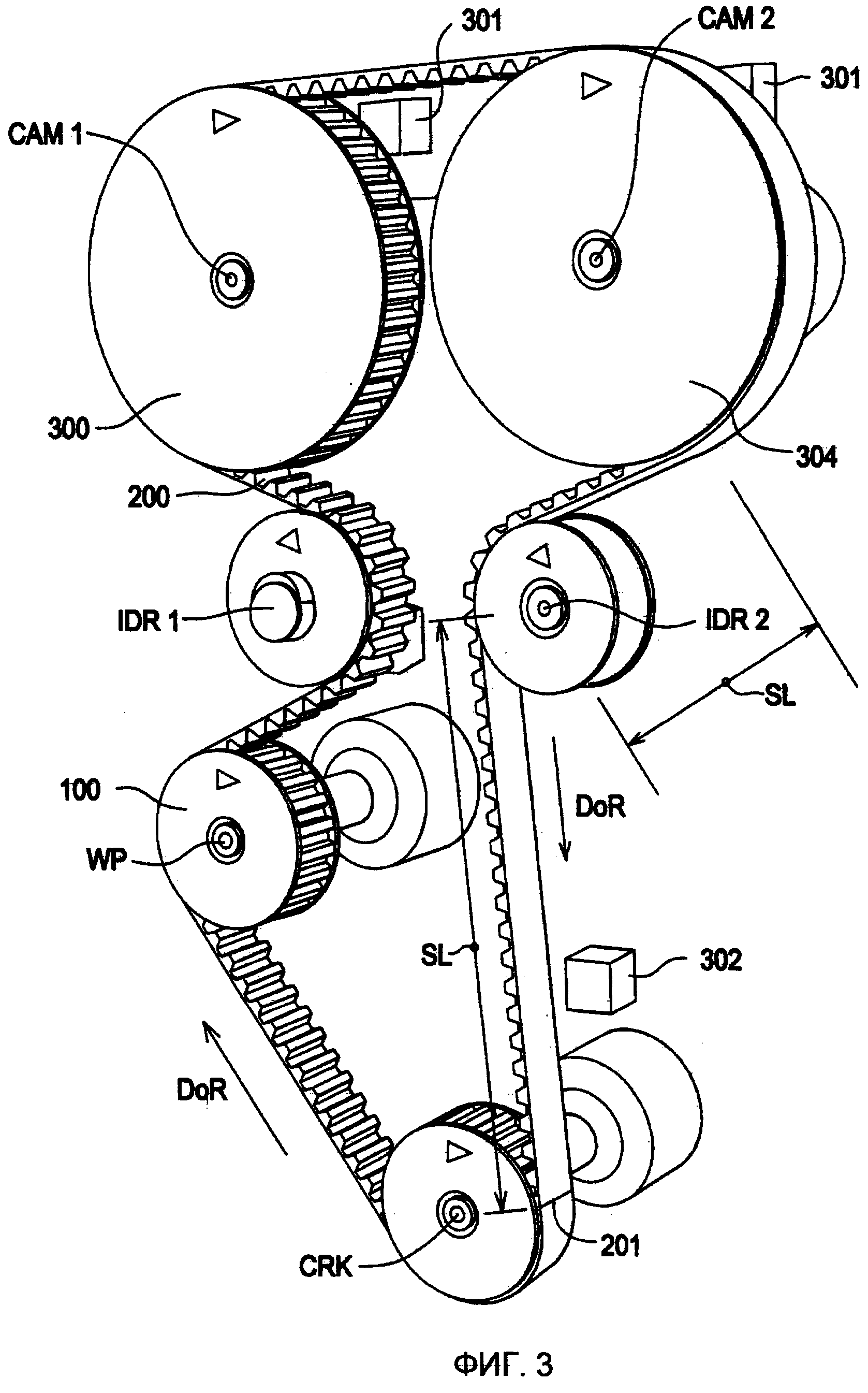
На фиг.3 представлен вид в перспективе двухкулачкового, четырехцилиндрового, четырехтактного бензинового двигателя.
На фиг.4 представлен вид в перспективе однокулачкового, четырехцилиндрового, четырехтактного дизельного двигателя, который имеет топливный насос, приводимый в действие в задней части распределительного вала.
На фиг.5 представлен вид в перспективе однокулачкового, четырехцилиндрового, четырехтактного дизельного двигателя с топливным насосом, встроенным в систему синхронного ременного привода.
На фиг.6 представлена схема двухкулачкового, четырехцилиндрового, четырехтактного бензинового двигателя.
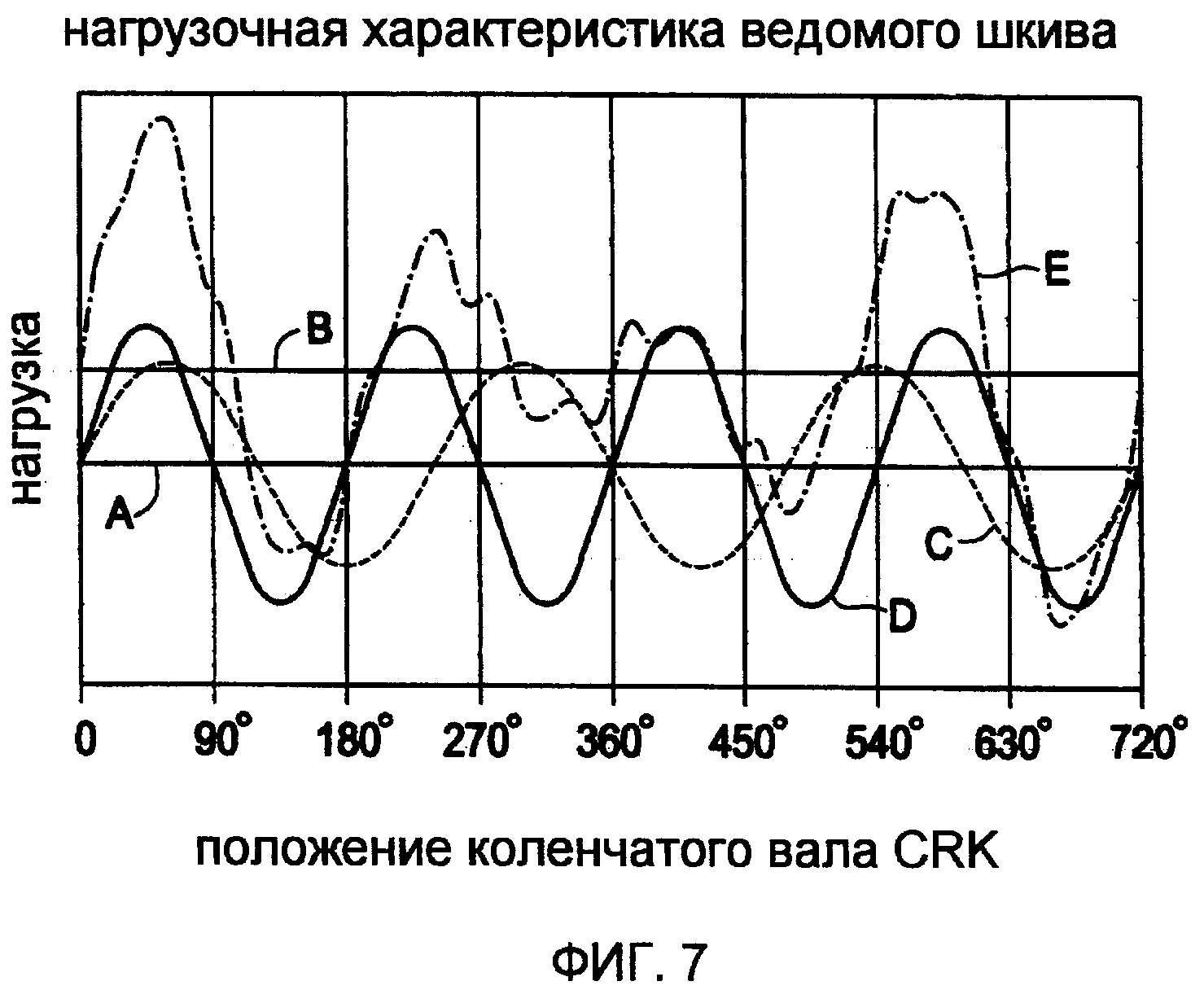
На фиг.7 представлена типичная характеристика полной нагрузки для ведомой звездочки четырехцилиндрового, четырехтактного дизельного двигателя, включающая в себя полученные кривые 1,5-го и 2-го порядков.
На фиг.8 представлена нагрузочная характеристика 2-го порядка для ведомой звездочки четырехцилиндрового, четырехтактного двигателя.
На фиг.9 представлена нагрузочная характеристика 1,5-го порядка для ведомой звездочки четырехцилиндрового, четырехтактного дизельного двигателя с трехпоршневым топливным насосом (или другого устройства, включающего характеристику 1,5-го порядка).
На фиг.10 представлено семейство кривых, характеризующих взаимосвязь между напряжением и деформацией для синхронного ремня.
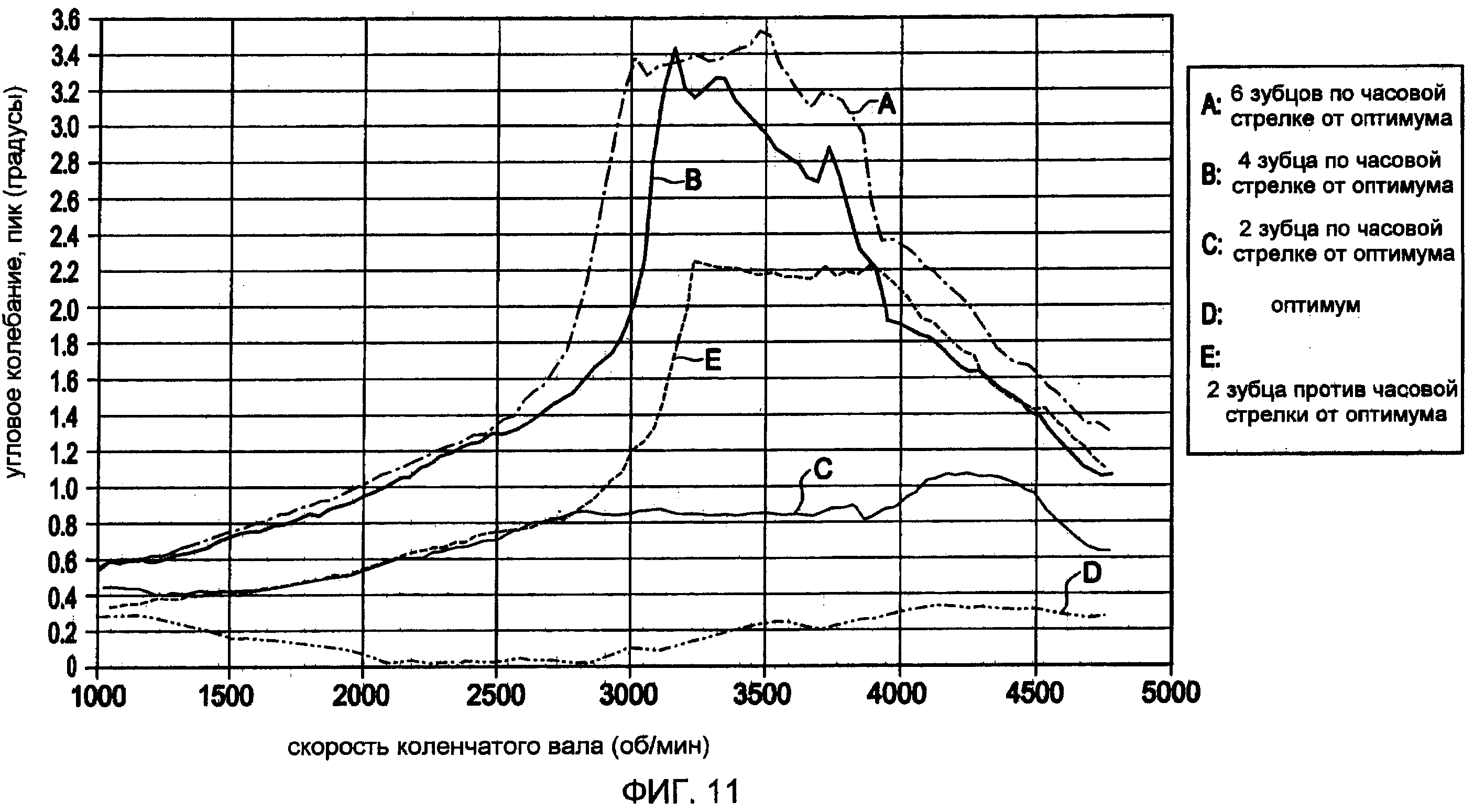
На фиг.11 представлен ряд кривых, демонстрирующих влияние фазирования/расфазирования округлой звездочки на динамику двигателя для системы согласно фиг.6.
На фиг.12 представлен график, демонстрирующий характеристику угловой вибрации на распределительном валу двигателя, показанного на фиг.6, до и после применения округлой звездочки.
На фиг.13 представлен график, демонстрирующий характеристику натяжения ведущей части ремня для двигателя, показанного на фиг.6, до и после применения округлой звездочки.
Подробное описание предпочтительного варианта осуществления конструкции
На фиг.1 представлен боковой вид округлой звездочки. Звездочка 10 согласно изобретению содержит зубчатую поверхность 11. Зубчатая поверхность 11 входит в зацепление с зубчатым ремнем. Зубчатая поверхность 11 содержит контактные области 12 и смежные с ними канавки 13. Канавки 13 имеют форму, которая сопрягается с соответствующим образом спроектированной формой зубцов зубчатого ремня. Зубчатые ремни также называют синхронными ремнями, поскольку их используют для синхронизации вращения ведущей и ведомой звездочки.
Звездочка 10 содержит участок 14 и участок 15. Участок 14 имеет дугообразную зубчатую поверхность 11а, которая имеет постоянный радиус R2. Участок 15 имеет дугообразную зубчатую поверхность 11b, которая имеет постоянный радиус R1. Участки 14 и 15 представляют собой сегменты круга, поскольку радиусы R1 и R2 равны и постоянны. Использование сегментов круга подобным способом позволяет уменьшить сложность процесса проектирования и изготовления звездочки согласно изобретению.
Между участками 14 и 15 расположен линейный участок 16. Участок 16 имеет прямоугольное сечение, которое обеспечивает смещение каждого из участков 14 и 15 друг от друга, придавая при этом звездочке округлую форму. Между точками 160 и 161, а также 162 и 163 поверхность 11 звездочки прямая, то есть линейная или плоская.
Плоский участок 16 имеет длину, которая связана с амплитудой колебаний крутящего момента системы. В этом варианте осуществления участок 16 имеет размер (W), приблизительно составляющий 2 мм между точками 160 и 161, а также точками 162 и 163. Следовательно, центр кривизны 17 участка 14 смещен на расстояние W/2, составляющее приблизительно 1 мм, от центра вращения 19 звездочки. При этом центр кривизны 18 участка 15 также смещен на расстояние W/2, приблизительно составляющее 1 мм, от центра вращения 19 звездочки. Размеры приведены только в иллюстративных целях и не предназначены для наложения ограничений. Отсюда также следует, что бóльшая длина (ML) звездочки составляет:
Lбóльшaя=R1+R2+W
Больший сегмент (MG) для каждого участка 14, 15 имеет следующий размер:
MG=(R1+W/2) или (R2+W/2)
Меньшая длина имеет следующий размер:
Lменьшая=R1+R2
Длина (W) участка 16 определена радиусом участков 14 и 15 и зависит от динамической характеристики угловой вибрации, которую нейтрализуют так, как указано в другом месте этого описания. Звездочка 10 может быть сконструирована посредством использования постоянного поверхностного шага, постоянного углового шага или сочетания этих двух шагов. «Поверхностный шаг» определен как расстояние между любыми двумя последовательными, соответствующими «полюсами зацепления» на наружном диаметре звездочки, измеренное по линии наружного диаметра.
Постоянный поверхностный шаг вычисляют следующим образом:
SP=(((((Ng×Nom Pitch)/Pi)-PLD)×Pi)/Ng),
где SP - поверхностный шаг;
Ng - количество канавок в звездочке;
Nom Pitch - номинальный шаг системы;
Pi≈3,141;
PLD = диаметральная PLD системы.
«Угловой шаг» определяют как разность по углу между двумя последовательными соответствующими «полюсами зацепления» на звездочке, при этом он может быть измерен в градусах или радианах.
Постоянный угловой шаг определяют следующим образом:
AP=360/Ng Градусы,
где АР - угловой шаг;
Ng - количество канавок в звездочке.
Профиль канавок звездочки может быть спроектирован индивидуально для приспосабливания к конкретным динамическим характеристикам двигателя.
Модуль упругости пролета ремня в сочетании с модулем зубца и смещением звездочки (W/2) оптимизирован для устранения колебаний крутящего момента при заданной скорости двигателя. Следовательно, при таком применении ремень анализируют и проектируют как пружинный элемент системы в дополнение к приданию ему размера для передачи требуемых растягивающих нагрузок. Динамическую реакцию системы выбирают посредством итеративного процесса, чтобы добиться сочетания модуля ремня и радиуса округлой звездочки (R1 и R2), которое фактически позволяет устранить все колебания крутящего момента, в ином случае передаваемые через ремень и ременную систему привода.
На фиг.2 представлен боковой вид альтернативного варианта конструкции звездочки. Этот вариант содержит три линейных сегмента, расположенных между дугообразными участками 14, 15, 16, в иных отношениях описанных применительно к фиг.1. Три линейных сегмента (161-162), (163-164) и (165-166) расположены между каждым из дугообразных участков 14, 15, 16. Каждый дугообразный участок 14, 15, 16 соответственно имеет постоянные и равные радиусы R1, R2, R3. Три линейных сегмента одинаково отстоят друг от друга вокруг периферии звездочки с интервалами, приблизительно составляющими 120°. На фиг.9 представлена нагрузочная характеристика 1,5-го порядка в системе, использующей звездочку, показанную на фиг.2.
На фиг.3, 4 и 5 представлены некоторые типичные схемы привода для четырехцилиндровых, четырехтактных двигателей внутреннего сгорания, в которых используют зубчатую ременную систему для приведения в действие распределительного вала и вспомогательного оборудования. Эти двигатели обычно демонстрируют высокую динамику 2-го порядка. В зависимости от технической характеристики топливного насоса некоторые дизельные двигатели могут иметь 1,5-й порядок, который является преобладающим. Диаграммы, демонстрирующие такую динамику, можно видеть на фиг.7, 8 и 9.
Для противодействия динамике 2-го порядка звездочку 10, согласно изобретению, прикрепляют к коленчатому валу Crk двигателя. В зависимости от наличия других преобладающих порядков может оказаться необходимым применить альтернативные варианты осуществления звездочки. Они могут быть прикреплены к коленчатому валу, но в равной степени могут быть применены где-либо еще в системе, например, в качестве звездочки водяного насоса или звездочки (звездочек) распределительного вала. Коленчатый вал двигателя представляет собой ведущий элемент для всей системы ременного привода. Направлением привода ремня в движение является направление DoR. Благодаря передаточному отношению звездочки коленчатый вал Crk двигателя поворачивается дважды за каждый оборот распределительного вала САМ1.
Согласно фиг.3 звездочка 300 подсоединена к распределительному валу САМ1, а звездочка 304 подсоединена ко второму распределительному валу САМ2. Шкивы Idr1 и Idr2, известные в этой области, используют для сохранения надлежащего направления движения ремня и управления его натяжением. Звездочку 100 соединяют с водяным насосом WP. Бесконечный зубчатый элемент 200 проходит по нескольким звездочкам. Направление вращения бесконечного зубчатого элемента 200 обозначено DoR. Точка, в которой бесконечный зубчатый элемент 200 входит в зацепление со звездочкой CRK коленчатого вала, обозначена позицией 201. Инерция распределительного вала и нагрузки от крутящего момента обозначены позицией 301.
Бесконечный зубчатый элемент 200 проходит между звездочкой 10 и звездочкой 300 кулачка. Точка 201 входа бесконечного зубчатого элемента представляет собой точку, в которой бесконечный зубчатый элемент 200 входит в зацепление со звездочкой. Система согласно изобретению минимизирует колебания крутящего момента посредством синхронизации положения точки 201 входа с большей длиной (ML) звездочки 10. Длина пролета ремня между коленчатым валом CRK и звездочкой 304 кулачка обозначена «SL».
Подобным же образом, согласно фиг.4 и 5, звездочку 300 прикрепляют к распределительному валу САМ двигателя. На фиг.4 характеристика нагрузки 301 включает в себя характеристику крутящего момента топливного насоса, прикрепленного к задней части распределительного вала, в то время как на фиг.5 крутящий момент топливного насоса представлен характеристикой нагрузки 302. Также могут быть представлены инерционные нагрузки и нагрузки от крутящего момента (301, 302, 101), создаваемые другими элементами, таким как водяной и вакуумный насосы, а именно водяным насосом WP (101) на фиг.4 и фиг.5. На фиг.4 позициями IDR1 и IDR2 обозначены шкивы, известные в этой области и служащие для надлежащего придания направления бесконечному зубчатому элементу 200. На фиг.4 длина пролета бесконечного зубчатого элемента между звездочкой 10 коленчатого вала и звездочкой 300 кулачка обозначена «SL».
Для бензинового двигателя преобладающие циклические нагрузки, обусловленные колебаниями крутящего момента, обычно представляют собой характеристику распределительного вала. Для дизельного двигателя преобладающий порядок может быть создан распределительным валом и/или нагнетательным топливным насосом, который может быть включен в систему привода. Крутящие моменты, создаваемые водяным насосом и вакуумным насосом, могут изменяться, но они не являются циклическими в пределах своего собственного состояния за тот же самый период или при той же частоте, как у распределительных валов, и обычно не являются преобладающими характеристиками динамики привода.
На фиг.5 представлен вид в перспективе еще одного варианта конструкции однокулачкового двигателя с нагнетательным топливным насосом, включенным в привод для дизельного двигателя. В этом варианте в дополнение к системе, показанной на фиг.4, система также содержит звездочку 305, подсоединенную к топливному насосу IP. Также показана звездочка Р1, которая может входить в зацепление с еще одним многократно обрезиненным ремнем, используемым для привода различного дополнительного оборудования двигателя (не показано). На фиг.5 нагрузки кулачка обозначены позицией 301, а нагрузка топливного насоса обозначена позицией 302. Звездочка 100 соединена с водяным насосом WP. На фиг.5 нагрузка от крутящего момента, создаваемая нагнетательным топливным насосом, представлена позицией 302.
Типичная полная нагрузочная характеристика для четырехцилиндрового, четырехтактного двигателя представлена кривой «Е» на фиг.7. Кривые «D» и «С» представляют собой типичные характеристики 2-го и 1,5-го порядка, которые получают из полной нагрузочной характеристики. Нагрузочная характеристика четырехцилиндрового, четырехтактного бензинового двигателя обычно не включает в себя 1,5-й порядок.
Изменение среднего радиуса в точке 201 зацепления ремня со звездочкой 10 согласно изобретению, когда она вращается, характеризует кривая «С» на фиг.8 и 9. Интеграл кривой «С», который представляет собой изменение эффективной длины ремня согласно фиг.4, характеризует кривая «D» на фиг.8 и 9. Производная изменения среднего радиуса звездочки представляет собой ускорение данного места на зубчатой поверхности 11 вследствие изменения формы звездочки.
Для противодействия динамике 2-го порядка плоский участок 16 округлой звездочки 10 расположен синхронно со звездочкой 300 распределительного вала, так что изменение эффективной длины бесконечного зубчатого элемента 200 между звездочкой 300 и звездочкой 10 согласно фиг.4 обеспечено таким образом, что фактически будут устранены чередующиеся натяжения ремня, вызываемые циклическими колебаниями крутящего момента распределительного вала. Что касается примера решения для устранения динамики 2-го порядка, то такое решение может быть достигнуто посредством синхронизации максимальной длины звездочки 10 (R1+R2+W) для ее совпадения с точкой 201 входа ремня, когда крутящий момент распределительного вала и, следовательно, натяжение ремня находятся у своего максимума.
Абсолютная размерная характеристика привода, содержащего округлую звездочку, зависит от таких параметров, как колеблющийся крутящий момент, модуль упругости пролета ремня, инерция каждого из приводимого в действие дополнительного оборудования в системе, натяжение ремня при его установке и взаимодействие между ремнем и звездочками. Взаимодействие между ремнем и звездочками зависит от таких параметров, как количество зубцов в зацеплении на звездочке, модуль зубца ремня, размеры ремня и коэффициент трения между ремнем и поверхностями звездочек.
На фиг.6 представлен схематический вид двухкулачкового, четырехцилиндрового, четырехтактного бензинового двигателя. Иллюстративная система содержит кулачки CM1, CM2 и ремень В, проходящий между ними. Она дополнительно содержит натяжное устройство TEN, водяной насос WP и звездочку CRK коленчатого вала. Направление вращения ремня В обозначено DoR. Представляющие интерес длины пролета находятся между звездочкой CRK и звездочкой IDR, звездочкой IDR и звездочкой WP, а также звездочкой CRK и звездочкой WP. На фиг.6 длина пролета ремня между звездочкой CRK коленчатого вала и звездочкой кулачка CM1 обозначена «SL». Для расчетных целей, поскольку отсутствует основная динамическая нагрузка между звездочкой кулачка CM1 и звездочкой CRK коленчатого вала в направлении DoR, этот пролет можно трактовать как один пролет «SL». Приблизительные типичные значения переменных системы, описанной применительно к фиг.6, таковы:
типичные колебания крутящего момента кулачка составляют от 20 до 40 Нм/от 10 до 30 Нм;
модуль упругости пролета ремня 240 МПа;
типичные значения инерции элементов: коленчатый вал CRK - 0,4 гм2; распределительные валы СМ1 и СМ2 - 0,2 гм2; водяной насос WP - 0,15 гм2.
монтажное натяжение ремня - 400 Н (это монтажное натяжение сохраняют посредством натяжного устройства TEN способом, который известен в этой области);
зубцы, находящиеся в зацеплении на трех звездочках: на звездочке коленчатого вала ⇒ 9 зубцов, на звездочках распределительного вала СМ1 и распределительного вала СМ2 ⇒ 15 зубцов;
размеры ремня: ширина 25,4 мм, длина 1257,3 мм.
Типичные значения коэффициента трения для поверхности 11 звездочки находятся в диапазоне от 0,15 до 0,5, но обычно это значение составляет 0,2.
Типичные значения монтажного натяжения ремня могут находиться в диапазоне от 75 Н до 900 Н в зависимости от требований, предъявляемых к системе.
Модуль упругости пролета ремня зависит от конструкции натяжного элемента, количества прядей натяжного элемента в ремне и ширины ремня. Пример модуля упругости пролета ремня в случае ремня шириной 25,4 мм, имеющего 20 натяжных элементов, должен находиться в районе приблизительно 240 МПа.
На фиг.7 представлена типичная характеристика полной нагрузки для ведомой звездочки четырехцилиндрового, четырехтактного дизельного двигателя, включая полученные кривые 1,5-го порядка (кривая «С») и 2-го порядка (кривая «D»). Характеристика нагрузки четырехцилиндрового, четырехтактного бензинового двигателя, как правило, не будет включать в себя 1,5-й порядок. «Смещение» относится к W/2. «Полная нагрузка» представлена на фиг.7 линией «Е».
На фиг.7 линия «А» представляет собой линию нулевого крутящего момента. Линия «В» характеризует средний крутящий момент ременной системы привода. Кривая «С» представляет собой характеристику крутящего момента 1,5-го порядка, полученную из кривой «Е» полной нагрузки. Кривая «D» представляет собой характеристику крутящего момента 2-го порядка, полученную из кривой «Е» полной нагрузки. Кривая «Е» представляет собой характеристику полного крутящего момента двигателя, измеренную на коленчатом валу CRK. Площадь под кривой «Е» представляет собой работу, выполненную для вращения двигателя с определенной скоростью.
На фиг.8 представлена нагрузочная характеристика 2-го порядка (кривая «В») для ведущей звездочки четырехцилиндрового, четырехтактного двигателя, включая изменение радиуса (кривая «С») округлой звездочки и получаемое в результате изменение длины пролета ремня (кривая «D»).
На фиг.8 линия «А» представляет собой линию нулевого крутящего момента. Кривая «В» представляет собой характеристику крутящего момента 2-го порядка, полученную из полной нагрузки. Кривая «С» представляет собой изменение эффективного радиуса шкива коленчатого вала, когда он поворачивается на 360 градусов, вызываемое сегментом 16, показанным на фиг.1. Кривая «D» представляет собой интеграл кривой «С» и характеризует эффективное изменение длины пролета приводного ремня, создаваемое звездочкой, описанной применительно к фиг.1.
На фиг.9 представлена нагрузочная характеристика «В» 1,5-го порядка для ведущей звездочки четырехцилиндрового, четырехтактного дизельного двигателя с трехпоршневым топливным насосом (или с другим приводимым в действие устройством, которое обуславливает 1,5-й порядок), включая изменение длины радиуса звездочки (кривая «С») для альтернативного, трехсекторного варианта конструкции округлой звездочки (фиг.2) и получаемое в результате изменение (кривая «D») длины пролета ремня. Длина пролета ремня представляет собой, например, расстояние между звездочкой кулачка САМ и звездочкой коленчатого вала CRK согласно фиг.6.
На фиг.9 линия «А» представляет собой линию нулевого крутящего момента. Кривая «В» представляет собой характеристику крутящего момента 1,5-го порядка, полученную из полной нагрузки. Кривая «С» представляет собой изменение эффективного радиуса шкива коленчатого вала, когда он поворачивается на 360 градусов. Кривая «D» представляет собой интеграл кривой «С» и характеризует эффективное изменение приводной длины, вызываемое альтернативным вариантом конструкции звездочки, описанной применительно к фиг.3.
Модуль упругости работающего на растяжение элемента различных ремней, используемых системе согласно изобретению, показан на фиг.10. Кривые с SS1 по SS6 представляют собой известные кривые взаимосвязи напряжения и деформации для различных бесконечных зубчатых элементов 200. Каждая кривая представляет собой модуль упругости при использовании иного материала для работающего на растяжение корда в ремне. Ремень с основной частью из эластомера HNBR (бутадиеновый каучук) носит лишь иллюстративный характер и не предназначен для наложения ограничений. В дополнение к HNBR другие материалы для основной части ремня могут включать в себя EPDM (каучук на основе сополимера этилена, пропилена и диенового мономера), CR (бутадиенстирольный каучук низкотемпературной полимеризации) и полиуретан либо комбинацию двух или более из указанных выше материалов. Материалы содержат следующее:
SS1 (работающий на растяжение корд из стекловолокна 1, основная часть из HNBR);
SS2 ((работающий на растяжение корд из стекловолокна 2, основная часть из HNBR);
SS3 (работающий на растяжение корд из стекловолокна 3, основная часть из HNBR);
SS4 (работающий на растяжение корд из углеродного волокна, основная часть из HNBR);
SS5 (работающий на растяжение корд из арамида™, основная часть из HNBR);
SS6 (работающий на растяжение корд из углеродного волокна, основная часть из HNBR).
Модуль упругости каждого работающего на растяжение элемента обуславливает наклон каждой из кривых SS1-SS6, что известно в этой области. Обычно это измерение и вычисление фактически выполняют на линейной части кривой. Дополнительно к стекловолокну, углеродному волокну и арамидуEM еще один работающий на растяжение элемент может включать в себя проволоку в виде тонких нитей из нержавеющей стали.
М=Δ напряжения/Δ деформации (при измерении фактически линейного участка кривой).
Модуль упругости пролета ремня зависит от конструкции элемента, работающего на растяжение, количества прядей такого элемента в ремне и ширины ремня. Например, модуль упругости пролета ремня для кривой SS1 при ширине ремня 25,4 мм с 20 прядями работающего на растяжение элемента из стекловолокна должен составлять приблизительно 242 МПа.
На фиг.11 представлен ряд кривых, демонстрирующих влияние фазирования/расфазирования большей длины округлой звездочки на динамику двигателя для системы согласно фиг.6. Кривая «D» характеризует обеспечение оптимальной синхронизации между положением большей длины звездочки у точки 201 входа ремня и импульсом крутящего момента. Кривые А, В и С смещены по времени по часовой стрелке от положения кривой «D» соответственно на +6, +4 и +2 зубца. Кривая «Е» смещена по времени на 2 зубца в направлении против часовой стрелки. Фазирование максимальной длины пролета ремня по отношению к пиковому крутящему моменту и инерционной нагрузке может изменяться в зависимости от преобладающих порядков привода и тех из них, которые должны быть уменьшены системой. Точка 201 входа ремня представляет собой точку, в которой ремень входит в. зацепление со звездочкой. На фиг.3 длина пролета обозначена «SL».
Что касается углового интервала или фазирования, то допустимое угловое отклонение вычисляют, используя следующее:
+/- (360/2 × количество канавок звездочки).
Длина пролета ременного привода находится у максимума, когда крутящий момент находится у максимума.
На фиг.12 представлен график, демонстрирующий влияние надлежащим образом фазированной округлой звездочки на двухкулачковый, четырехцилиндровый, четырехтактный двигатель, представленный на фиг.6. Кривые «А» и «В» характеризуют измеренные значения углового колебания соответственно на входной и выходной звездочках распределительного вала для известной конструкции, использующей круглые звездочки.
Для сравнения кривые «С» и «D» представляют собой измеренные значения углового колебания соответственно на входной и выходной звездочках распределительного вала в случае звездочки согласно изобретению на коленчатом вале. Получаемое в результате уменьшение углового колебания приблизительно составляет 50%.
Аналогично указанному, на фиг.13 представлен график, демонстрирующий влияние надлежащим образом фазированной округлой звездочки, которая описана применительно к фиг.1, на двухкулачковый, четырехцилиндровый, четырехтактный двигатель, который описан применительно к фиг.6. Кривые «А», «В» и «С» характеризуют измеренные значения максимальных, средних и минимальных динамических растяжений с ведущей стороны соответственно в диапазоне скоростей двигателя в случае известной конструкции привода. В этом примере такое растяжение было измерено в месте нахождения направляющего шкива IDR согласно фиг.6. Для ремня с продленным сроком службы растяжение с ведущей стороны ремня должно быть сведено к минимуму. Кривые «D», «Е» и «F» характеризуют измеренные значения для максимальных, средних и минимальных растяжений ремня с ведущей стороны при использовании звездочки согласно изобретению. Полученное в результате уменьшение монтажного растяжения с ведущей стороны находится в диапазоне 50-60% при резонансном диапазоне скорости двигателя (приблизительно от 4000 до 4800 об/мин). Уменьшение растяжения ведущей стороны ремня характеризует значительное усовершенствование в отношении ресурса работы ремня.
Хотя были описаны конкретные формы изобретения, специалистам в данной области техники будет очевидно, что в конструкции и в ее элементах могут быть выполнены изменения, не выходящие за рамки сущности и объема описанного здесь изобретения.
Реферат
Изобретение относится к системе синхронного ременного привода, а более конкретно - к системе, имеющей округлую звездочку. Система синхронного ременного привода содержит округлую звездочку (10) и вторую звездочку (300). Округлая звездочка (10) имеет зубчатую поверхность и, по меньшей мере, один линейный участок (16). Линейный участок (16) расположен между двумя дугообразными участками (14, 15). Дугообразные участки (14, 15) имеют постоянный радиус (R1, R2), а линейный участок имеет заданную длину. Вторая звездочка (300) имеет зубчатую поверхность и находится в зацеплении с округлой звездочкой посредством бесконечного зубчатого элемента (200). Вторая звездочка соединена с вращательной нагрузкой, имеющей циклические колебания крутящего момента. Линейный участок округлой звездочки расположен так, чтобы обеспечить изменение длины ремня между звездочками таким образом, чтобы устранить чередующиеся натяжения ремня, вызываемые циклическими колебаниями крутящего момента. Округлая звездочка (10) может быть прикреплена к коленчатому валу двигателя, а вторая звездочка (300) - к распределительному. Округлая звездочка (10) может содержать второй линейный участок или, по меньшей мере, три линейных участка. Каждый линейный участок расположен между двумя дугообразными участками, каждый из которых имеет постоянный радиус. Технический результат заключается в устранении чередующихся натяжений ремня, вызываемых циклическими колебаниями крутящего момента. 4 з.п. ф-лы, 13 ил.
Формула
округлую звездочку (10), имеющую зубчатую поверхность и, по меньшей мере, один линейный участок (16), расположенный между двумя дугообразными участками (14, 15), при этом дугообразные участки имеют постоянный радиус (R1, R2), а линейный участок имеет заданную длину;
вторую звездочку (300), имеющую зубчатую поверхность и находящуюся в зацеплении с округлой звездочкой посредством бесконечного зубчатого элемента (200);
причем вторая звездочка соединена с вращательной нагрузкой, имеющей циклические колебания крутящего момента;
при этом линейный участок округлой звездочки расположен так, чтобы обеспечить изменение длины ремня между звездочками таким образом, что фактически будут устранены чередующиеся натяжения ремня, вызываемые циклическими колебаниями крутящего момента.
по меньшей мере, три линейных участка;
при этом каждый линейный участок расположен между двумя дугообразными участками, каждый из которых имеет постоянный радиус.
Документы, цитированные в отчёте о поиске
Передача с зубчатым ремнем или цепная передача
Комментарии