Система безопасности шлюза - RU2728227C1
Код документа: RU2728227C1
Чертежи

Описание
Изобретение относится к области водного транспорта и предназначено для повышения безопасности шлюзования судов, а именно для обеспечения безопасности, в том числе для защиты ворот шлюза от навала судов.
Известны системы в виде предохранительных устройств, предназначенных для защиты ворот судоходного шлюза от навала судов. Такие устройства включают гибкий заградительный элемент, перекрывающий судоходный пролет шлюза и амортизаторы, установленные на стенках камеры шлюза (Авт.св. СССР №1079745 от 03.09.82, авторы Вознесенский В.А., Кулагин С.И. Заявитель СКТБ «Ленгидросталь»).
Недостатком таких устройств является сложность маневрирования заградительным элементом, который при установке в судоходный пролет специальными механизмами опускается в воду ниже осадки судов, или поднимается вверх портальным подъемником выше надводных габаритов судна. Работа таких механизмов приводит к частым отказам и к остановке шлюза.
Известны системы в виде поворотных рам, которые шарнирно закреплены на стенках шлюза и перекрывают судоходный пролет шлюза и удерживают судно за скуловые обводы (см. Rudolf Kuhn, Binnen-werkehrwasserbau, Berlin. 1984, стр. 298). Однако такие системы недостаточно надежны, т.к. требуют маневрирования поворотными рамами перед каждым входом судна в камеру, что удлиняет цикл судопропуска, требуют наладки механизмов поворота.
Известна система безопасности шлюза по патенту РФ на изобретение №2428541, МПК Е02В 7/20, опубл. 10.09.2011 г. прототип.
Эта система содержит ворота, две поворотные палы, размещенных в нишах стенок шлюза, при этом между стенкой ниши и палами установлены баллоны из гибкой ткани, а на площадках камеры шлюза установлены ресиверы сжатого воздуха, соединенные с баллонами трубопроводом, перекрываемым автоматическим клапаном, над воротами установлен радар.
Недостатки этой системы ее низкая надежность из-за ее ограниченных функциональных возможностей и работы в аналоговом режиме.
Задачи создания изобретения: более точное определение координат и скорости судов, входящих в шлюз и получение информации об их внешнем виде на экране монитора оператора и автоматизация их сопровождения.
Достигнутые технические результаты: более точное определение координат и скорости судов, входящих в шлюз и получение информации об их внешнем виде на экране монитора оператора и автоматизация их сопровождения.
Решение указанных задач достигнуто в системе безопасности шлюза, состоящей из системы предотвращения навала судов на ворота и радара, установленного напротив ворот по ходу судов, тем, что система безопасности содержит модуль видеонаблюдения с набором видеокамер, присоединенными к программно-аппаратному комплексу, монитор, соединенный с программно-аппаратным комплексом, причем программно-аппаратный комплекс содержит модуль обработки координат, в который поступают данные с источников координат и времени отслеживания объектов, при этом весь программно-аппаратный комплекс и соединенные с ним модули выполнены с возможностью работы в цифровом режиме.
Программно-аппаратный комплекс может содержать модуль обработки координат, 4D-модель, модуль визуализации, вход которого соединен с выходом модуля обработки координат, модуль сшивки набора камер, вход которого соединен с выходом из набора видеокамер и модуль отслеживания объектов, вход которого соединен с выходом из модуля сшивки набора камер, а выход - с входом модуля визуализации, выход из модуля визуализации соединен с входом в монитор.
К входу программно-аппаратного комплекса может быть присоединен выход контроллера датчиков, к входам которого присоединены датчики и измерительная аппаратура.
В качестве датчиков могут быть использованы: датчики уровня воды, датчики углового положения ворот, датчик давления воздуха в ресивере, датчики давления и датчики расхода воды, в качестве измерительной аппаратуры датчики текущего расхода энергии и счетчики энергии.
К входу в программно-аппаратный комплекс может быть присоединен выход из модуля видеонаблюдения с системой набора камер.
К входу в программно-аппаратный комплекс может быть присоединен выход из автоматической идентификационной системы.
К выходу из программно-аппаратного комплекса может быть присоединен вход контроллера управления, выходы которого соединены с приводами.
Наличие всех существенных признаков п. 1 формулы изобретения необходимо и достаточно для достижения технического результата.
Сущность изобретения поясняется чертежами (фиг. 1-7), где
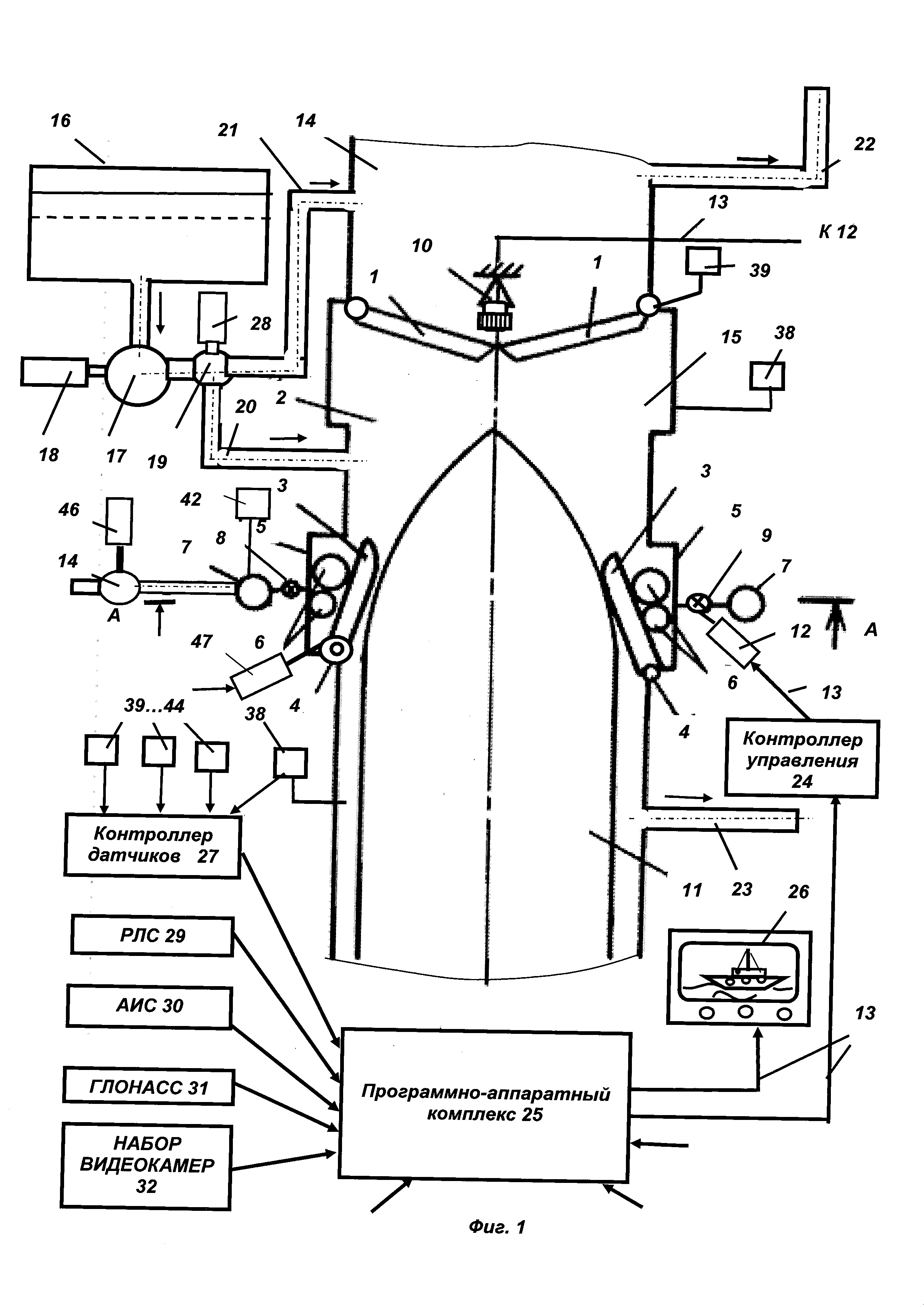
на фиг. 1 представлен план нижней головы шлюза с судном и палами;
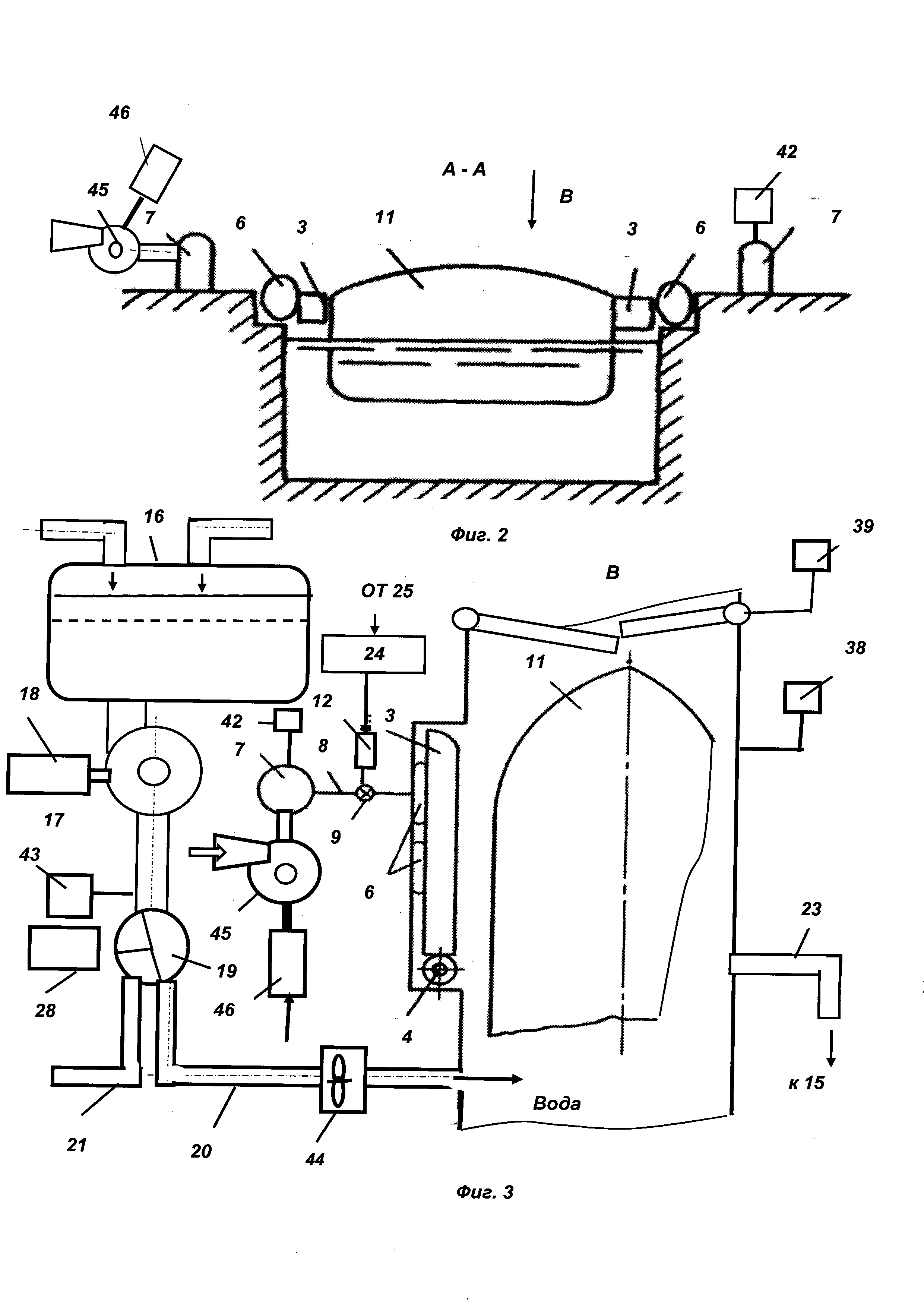
на фиг. 2 - разрез А - А на фиг. 1,
на фиг. 3 - представлен в плане вид В на фиг. 1,
на фиг. 4 - продольный разрез шлюза с установкой радара для измерения скорости судна,
на фиг. 5 - приведена более подробная схема программно-аппаратного комплекса,
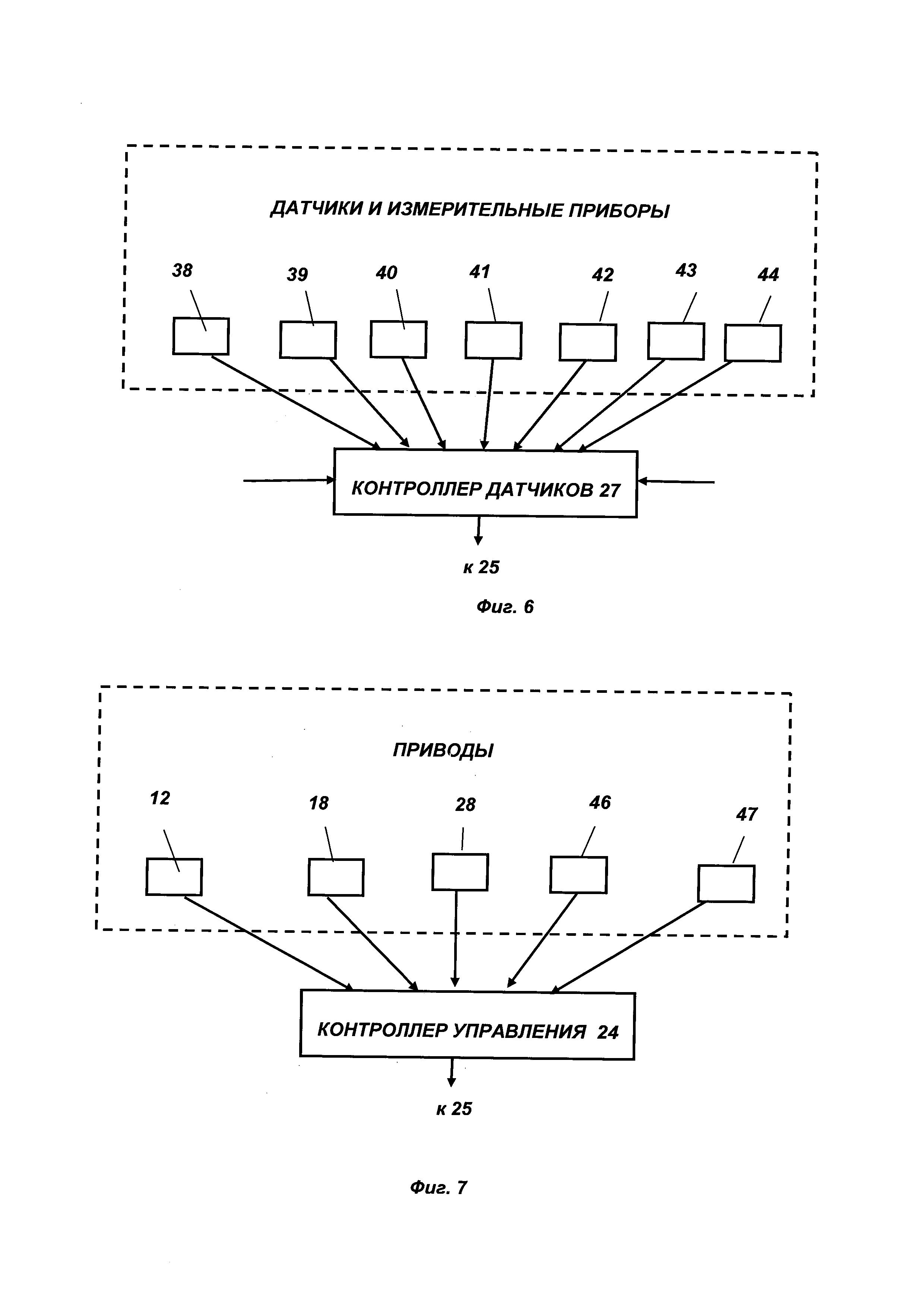
на фиг. 6 приведена схема подключения датчиков контроля,
на фиг. 7 приведена схема управления.
Условные обозначения, принятые в описании:
ворота 1,
нижняя голова шлюза 2,
палы 3,
шарниры 4,
стенка ниши 5,
баллоны 6,
ресиверы 7,
трубопровод 8,
клапан 9,
радар 10,
судно 11,
привод клапана 12,
канал связи 13,
первый отсек 14,
второй отсек 15,
резервуар 16,
насос 17,
привод насоса 18,
трехходовой кран 19,
первая напорная труба 20,
вторая напорная труба 21,
первая труба слива 22,
вторая труба слива 23,
контроллер управления 24,
программно-аппаратный комплекс 25,
монитор 26,
контроллер датчиков 27,
привод крана 28,
РЛС 29 (радиолокационная станция),
АИС 30, (автоматическая идентификационная система),
ГЛОНАСС 31,
набор видеокамер 32,
модуль обработки координат 33.
4D-модель 34,
модуль визуализации 35,
модуль сшивки набора камер 36,
модуль отслеживания объектов 37,
датчики уровня воды 38,
датчики углового положения ворот 39,
датчики текущего расхода энергии 40,
счетчик энергии 41,
датчик давления воздуха 42,
датчики давления воды 43,
датчики расхода воды 44,
компрессор 45,
привод компрессора 46,
привод ворот 47.
Система безопасности шлюза (фиг. 1) предназначена, в частности для защиты ворот 1 от навала судов и включает на нижней голове шлюза 2 палы 3, закрепленные на стенах шлюза посредством шарниров 4. Палы 3 располагаются в стенках ниши 5. Между стенкой ниши 5 и палой 3 размещены баллоны 6, изготовленные из гибкого воздухонепроницаемого материала. На площадках нижней головы шлюза 2 установлены ресиверы 7, в которые подается сжатый воздух от компрессора (будет показан далее). Вместо ресиверов 7 могут быть установлены баллоны сжатого воздуха. Ресиверы 7 соединены с баллонами 6 трубопроводом 8, в котором установлен клапан 9. Над воротами 1 на тросовой подвеске или портале установлен радар 10 для измерения скорости движения судна 11. Клапан 9 имеет привод клапана 12, к которому присоединен канал связи 13. Первый отсек 14 и второй отсек 15 соединены с резервуаром 16 с водой. Это соединение содержит насос 17 с приводонасоса 18 и трехходовым краном 19 на его выходе. Соединение содержит первую напорную трубу 20 и вторую напорную трубу 21. Первая труба слива 22 и вторая труба слива 23 соединяют первый и второй отсеки 14 и 15 с резервуаром 16.
Трубы слива 22 и 23 также могут быть оборудованы насосами и соответствующими датчиками контроля. Система безопасности имеет контроллер управления 24 и программно-аппаратный комплекс 25, к которому каналами связи 13 присоединены контроллер управления 24, монитор 26. контроллер датчиков 27.
Трехходовой кран 19 содержит привод крана 28.
К контроллеру датчиков 27, в свою очередь присоединены все датчики.
Система безопасности содержит РЛС 29 (радиолокационная станция), АИС 30 (автоматическая идентификационная система), ГЛОНАСС 31, набор видеокамер 32.
Контроллер датчиков 27, РЛС 29, АИС 30, ГЛОНПСС 31 и набор видеокамер 32 присоединены к программно-аппаратному комплексу 25 (фиг. 1).
На фиг. 5 приведена более подробная схема Программно-аппаратного комплекса 25, разработанного ЗАО «ИНТЕГРА-С». Она содержит модуль обработки координат 33, 4D-модель 34 (новейшая разработка ЗАО «ИНТЕГРА-С»), модуль визуализации 35, модуль сшивки набора камер 36, модуль отслеживания объектов 37.
К выходу из модуля визуализации 35 присоединен монитор 26.
Система может быть оборудована компрессором 45 и приводом компрессора 46 (фиг. 3). Система также оборудована приводом ворот 47 (фиг. 1). В ресивере 7 установлен датчик давления воздуха 42.
В системе применены следующие датчики (фиг. 6):
- датчики уровня воды 38 в отсеках 14 и 15 шлюза (отсеком может быть сколь угодно много),
- датчики углового положения ворот 39,
- датчики текущего расхода энергии 40,
-счетчик энергии 41, потребляемой всеми модулями системы, в том числе насосом 17 и приводом компрессора 46, механически (валом) соединенный с компрессором 45.
- датчик давления воздуха 42 в ресивере 7,
- датчики давления воды 43 на выходе насоса 17, и возможно в других системах водоснабжения,
- датчики расхода воды 44 в первой и второй напорной трубах 20 и 21 соответственно. Датчики расхода воды 44 быть установлены и в трубах слива 22 и 23.
Автоматическая идентификационная система
В соответствии с требованиями новой главы V "Навигационная безопасность" Конвенции но охране человеческой жизни на море 1974 года (Конвенция СОЛАС-74) установка автоматической идентификационной системы (АИС) на судах должна проходить поэтапно, начиная с 1 июля 2002 года. Требования Конвенции СОЛАС-74 с поправками по оснащению судов аппаратурой АИС по срокам оборудования АИС сведены в табл. 1 и 2.
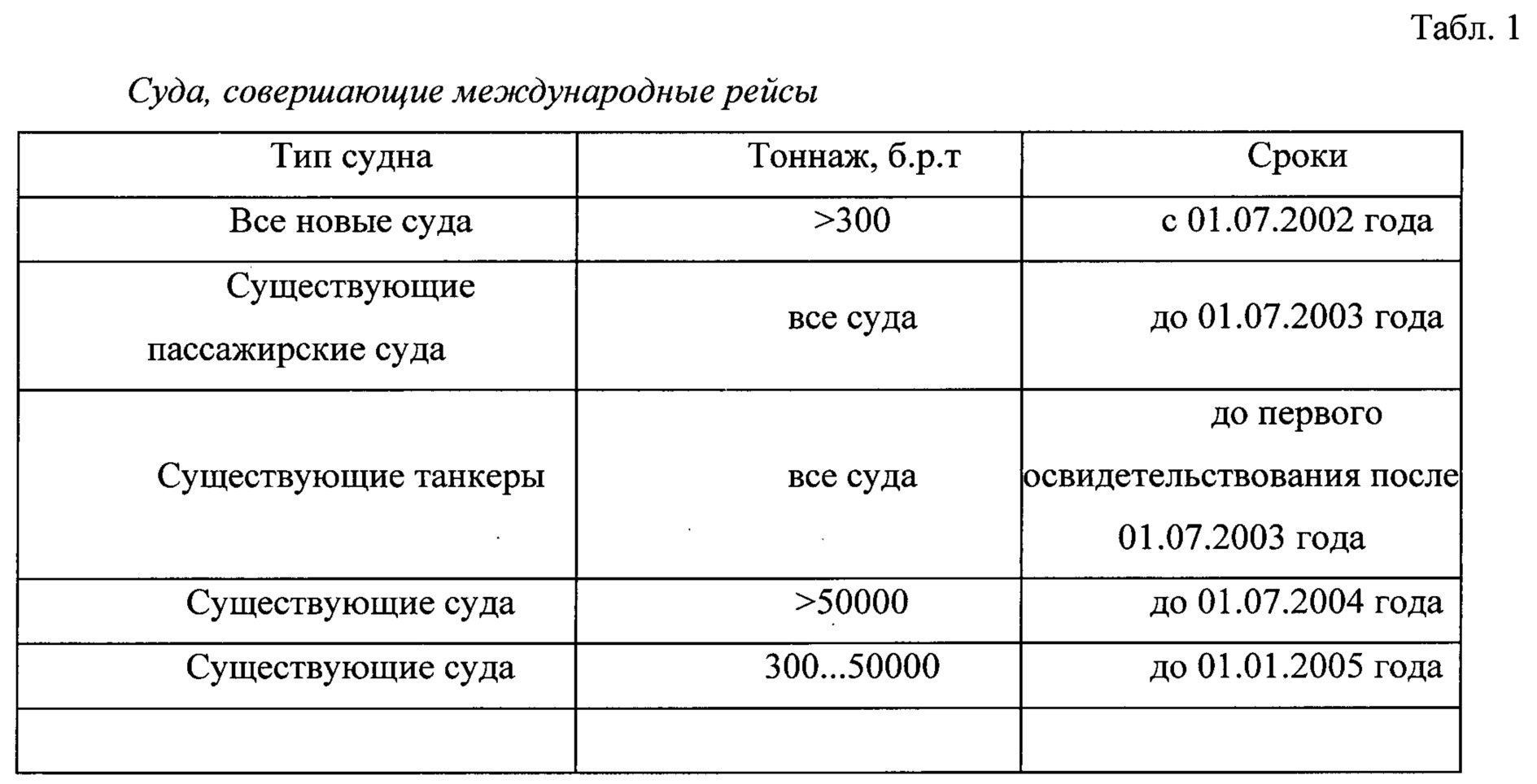
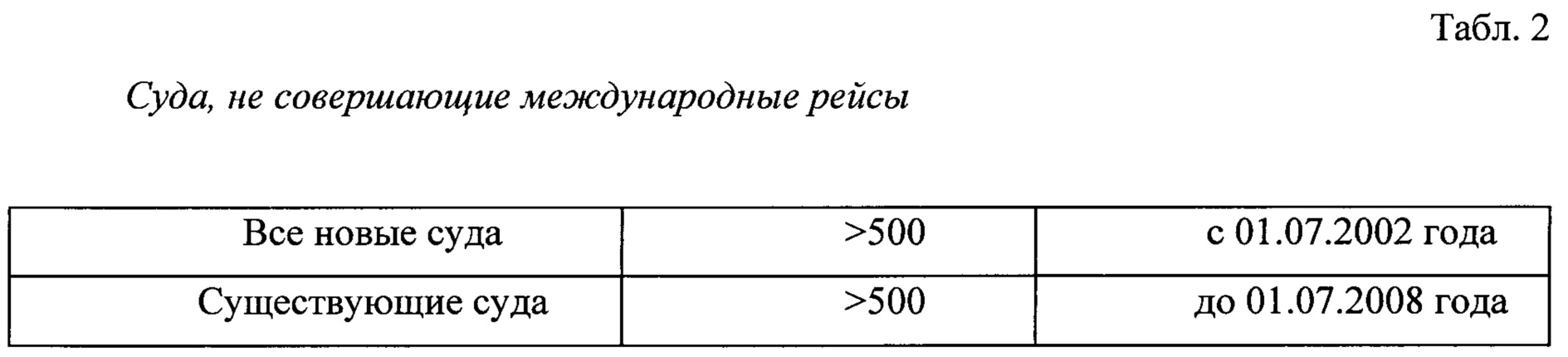
Таким образом, оборудование аппаратурой АИС всех судов, совершающих международные рейсы, было завершено до 1 января 2005 года. Суда валовой вместимостью более 500 б.р.т, не совершающие международных рейсов, были оснащены АИС до 1 июля 2008 года.
На фиг. 2 приведен разрез А - А на фиг. 1.
На фиг. 3 представлен в плане узел В фиг. 1.
На фиг. 4 представлен продольный разрез шлюза с установкой радара для измерения скорости судна.
На фиг. 5 - приведена более подробная схема программно-аппаратного комплекса 25, который содержит модуль обработки координат 33, 4D-модель 34, модуль визуализации 35, вход которого соединен с выходом модуля обработки координат 33, модуль сшивки набора камер 36, вход которого соединен с выходом из набора видеокамер 32 и модуль отслеживания объектов 37, вход которого соединен с выходом из модуля сшивки набора камер 36, а выход - с входом модуля визуализации 35. Выход из модуля визуализации 35 соединен с входом в монитор 26. Модуль сшивки набора камер 36 разработан в ЗАО «ИНТЕГРА-С» и позволяет с нескольких видеокамер получить качественное изображение определенного участка наблюдения.
На фиг. 6 приведена схема контроля систем датчиками 38-44, а на фиг. 7 система управления приводами 12, 18, 28, 46, 47.
РАБОТА СИСТЕМЫ
Работа системы безопасности для предупреждения навала судов на ворота (фиг. 1…7).
При входе судна 11 в нижнюю головку шлюза 2 радар 10 контролирует скорость движения. При нарушении судном 11 режима скорости радар 10 подает сигнал в компьютерную систему управления судопропуском. Тревожный сигнал передается с программно-аппаратного комплекса 25 сначала подается на контроллер управления 24, потом на привод клапанов 12 для открытия клапанов 9 и привод ворот 47. Клапаны 9 открывают воздуховод 8, в результате чего воздух из ресиверов 7 поступает в баллоны 6, которые, наполняясь, перемещают палы 3 в сторону камеры нижней головки шлюза 2. Палы 3, перекрывая судоходный пролет нижней головки шлюза 2. Ворота 1 открываются. Набор видеокамер 32 отслеживает все перемещения на территории шлюза и передает их на монитор 26 в формате 4D за счет обработки сигнала в модуле 4D поз. 36.
Датчики и измерительная аппаратура контролируют все технические параметры всех систем шлюза и передают информацию для обработки в программно-аппаратный комплекс 25 из которого в цифровом виде выводится на монитор 26 для контроля. Если параметр выходит за пределы допустимого, то его значение на экране монитора 26 показывают красным светом и подается звуковой сигнал. (Динамики на фиг. 1…7 не показаны).
Основные датчики и измерительные системы, установленные в системе безопасности:
датчики положения ворот,
датчик расхода электроэнергии всех потребителей и счетчик энергии,
датчики уровня воды в шлюзе и т.д.
ТЕХНИЧЕСКИЕ ВОЗМОЖНОСТИ СИСТЕМЫ
Программно-аппаратный комплекс 25 обеспечивает оцифровку любых реальных объектов различного масштаба и размещение их в виртуальной среде, доступ к которой осуществляется с рабочего места оператора, который может находиться где угодно.
Каждый оператор имеет настраиваемый, разграниченный доступ к управлению виртуальной средой, а виртуальная среда имеет прямое взаимодействие со всеми заведенными в нее техническими средствами безопасности (ТСБ) - видеокамерами, тепловизорами, РЛС, АИС, ГЛОНАСС/GPS и прочими поставщиками информации. Из этого следует, что с одного рабочего места оператора, можно получить полный контроль, управление и отчетность, как отдельных элементов, так и всего сооружения в целом, причем эти масштабы не имеют границ расширения.
Технические возможности системы более детально:
1. 4D модель: отображение на 3D карте водной и земной территории, зданий, ТСБ, транспортных средств, персонала и других объектов с привязкой к координатам Земли и времени. Просмотр произошедших событий и изменений с этими объектами по шкале времени, вывод динамики изменений в графиках.
Моделирование - это цифровой двойник объектов из реального мира в виртуальном. Позволяет отобразить объект любого масштаба в виртуальной среде, с любой детализацией. А также вносить изменения в существующие объекты и затем просматривать эти изменения по шкале времени. Цифровым двойником в виртуальном мире может быть, как здания с детальной прорисовкой, так и ТС (транспортных средств), датчики, видеокамеры, которыми можно управлять непосредственно с рабочего места оператора. Это уникальная разработка ЗАО «ИНТЕГРА-С». Имеется патент на изобретение №2667793, МПК G08C 21/00, опубл. 24.09.2018 г. и ПРЭВМ.
2. Аналитика видеопотока - это выявление и оповещение о критических ситуациях, произошедших в зоне обзора камеры. Таких как возникновение огня, дыма, оставленные или убранные предметы, пересечение границы запретной территории, появление людей, ТС, судов и других движущихся объектов, распознавание лиц, номеров ТС и типов судов, сопровождение обнаруженного объекта поворотными видеокамерами.
Аналитика видеопотока, позволяет операторам своевременно реагировать на произошедшее событие, благодаря оповещению оператора о сработавшем детекторе, таким образом необходимость постоянного просмотра всех камер отпадает, и отпадает необходимость в охранниках, которые патрулируют территорию. И также исключается полностью риск пропустить нарушение в зоне просмотра камеры, т.к. человек может отвлечься, а система анализирует данные 24 часа непрерывно.
3. Отслеживание перемещения объектов: отображение в реальном и прошлом времени перемещения любых объектов на 3D карте, персонала, ТС или судна. Составление тепловых карт, с наиболее активными зонами прохождения траекторий, показ местонахождения на 3D карте заданных объектов, анализ длительности пребывания в зонах, уведомления о проходе в запрещенную зону, подсчет времени нахождения в каждой зоне.
Источники координат и времени отслеживаемого мобильного объекта:

4. Сшивка видео: программно-аппаратное соединение кадров набора камер для получения единого видеоизображения контролируемой зоны, вплоть до кругового обзора.
5. Видеолокация: Определение координат мобильных объектов посредством анализа видеокадров панорамного обзора набора стационарных камер или сшивного видео, калиброванных по отношению к координатам установки, углам наклона и азимута.
6. Инвентаризация и учет: Паспортизация объектов виртуальной среды, присвоение инвентарных номеров каждому объекту, внесение подробной информации об объектах учета, группировка, консолидация объектов учета, удобный просмотр любого объекта, в виртуальной среде, на 3D плане, автоматическое оповещение об окончании сроков эксплуатации или переаттестации объектов учета. Управление объектами учета, просмотр характеристик.
Важная составляющая - это паспорт объекта виртуальной среды, позволяет вносить, изменять, учитывать установленные объекты, своевременно предоставлять информацию о состоянии, дате установки, датах освидетельствования, сроке эксплуатации, дате следующей аттестации или технического обслуживания. Каждый объект, от технических средств безопасности - ТСБ до целого здания имеет свой паспорт, с подробной информацией, к которой можно получить доступ и ознакомиться как с текущим состоянием, так и с состоянием в предыдущих периодах. На всех транспортных средствах ТС, обслуживающих шлюз должны быть установлены передатчики ГЛОНАС, а сотрудники шлюза обязаны постоянно носить с собой сотовые телефоны для идентификации места положения и связи с ними в любое время.
Учет энергетических ресурсов: анализ и подсчет потребления тепловой и электрической энергии, воды, газа и других потребляемых ресурсов. Уведомления о резких перепадах объемов потребления ресурсов, вывод в графики отчетности.
Расчет потребления ресурсов - значительно экономит средства, когда учет под полным контролем, а также своевременное оповещение и предотвращение утечки ресурсов, позволяет не допустить не учтенных затрат на эти ресурсы.
7. Мониторы операторов: это вывод информации по назначению всех важных систем на экранах мониторов каждого оператора системы безопасности.
8. Монитор руководителя обеспечивает, кроме того, вывод графиков роста и снижения, отображение текущих данных параметров систем. Отображение на 3D карте местоположения сотрудников и ТС, отображение отклонений показателей важных ресурсов, отображение нарушений в работе систем.
Монитор руководителя, необходим, для отображения интересуемых статистических данных о выборочных системах, таких как объемы потребления и расходы ресурсов, графики активности потребления по дням, неделям, месяцам, годам. Сведения о текущих нагрузках на системы, графики нагрузок за период. На экран выводятся важные данные, которые сказываются на работе шлюзового сооружения, выводится информация о не работающих в данный момент системах или оборудовании, графики технического обслуживания - ТО и прочее.
9. Работа в режиме 4D Система позволяет отслеживать объекты и события в прошлом и прогнозировать их в будущем. Например, можно получить внешний вид и технические характеристики судна 10-летней давности. Можно на экране монитора наблюдать последствия отказа одной из систем шлюза и т.д. Это достигнуто применение 4D модели, разработанной в ЗАО «ИНТЕГРА-С».
Изобретение, как упомянуто ранее, защищено патентом РФ на изобретение.
Применение системы безопасности позволило:
- исключить аварийные ситуации в шлюзе,
- предотвратить проникновение в шлюз посторонних судов,
- исключить навалы судов на ворота шлюза,
- исключить заторы в шлюзе,
- постоянно контролировать ситуацию на шлюзе и окружающих его и связанных с ним объектов (транспортные средства и техника) и субъектов (работников), в том числе их местонахождение и перемещение в формате 4D, при этом вся аппаратура всех систем работает в цифровом режиме, обеспечивая повышенную надежность и качество.
Реферат
Изобретение относится к техническим средствам охраны объектов и может быть использовано для обеспечения безопасности шлюза и исключения неправомерного проникновения через них на территорию Российской Федерации иностранных судов. Задачи создания изобретения: более точное определение координат и скорости судов, входящих в шлюз, и получение информации об их внешнем виде на экране монитора оператора и автоматизация их сопровождения. Система безопасности шлюза состоит из системы предотвращения навала судов на ворота, радара, установленного напротив ворот по ходу судов, при этом система безопасности содержит модуль видеонаблюдения с набором видеокамер, присоединенными к программно-аппаратному комплексу, и монитор, соединенный с программно-аппаратным комплексом. Программно-аппаратный комплекс содержит модуль обработки координат, в который поступают данные с источников координат и времени отслеживания объектов, при этом весь программно-аппаратный комплекс и соединенные с ним модули выполнены с возможностью работы в цифровом режиме. Программно-аппаратный комплекс может содержать модуль обработки координат, 4D-модель, модуль визуализации, вход которого соединен с выходом модуля обработки координат, модуль сшивки набора камер, вход которого соединен с выходом из набора видеокамер, и модуль отслеживания объектов, вход которого соединен с выходом из модуля сшивки набора камер, а выход - с входом модуля визуализации, выход из модуля визуализации соединен с входом в монитор. К входу программно-аппаратного комплекса может быть присоединен выход контроллера датчиков, к входам которого присоединены датчики и измерительная аппаратура. В качестве датчиков могут быть использованы: датчики уровня воды, датчики углового положения ворот, датчик давления воздуха в ресивере, датчики давления и датчики расхода воды, в качестве измерительной аппаратуры датчики текущего расхода энергии, счетчик энергии. К входу в программно-аппаратный комплекс может быть присоединен выход из модуля видеонаблюдения с системой набора камер. К входу в программно-аппаратный комплекс может быть присоединен выход из автоматической идентификационной системы. К выходу из программно-аппаратного комплекса может быть присоединен вход контроллера управления, выходы которого соединены с приводами. Достигнутые технические результаты: более точное определение координат и скорости судов, входящих в шлюз, и получение информации об их внешнем виде на экране монитора оператора и автоматизация их сопровождения. 6 з.п. ф-лы, 7 ил., 2 табл.
Комментарии