Способ синхронизации двигателей самолета с двойным промежуточным состоянием - RU2672440C2
Код документа: RU2672440C2
Чертежи




Описание
Данное изобретение относится к способу синхронизации двигателей самолета, в частности двухкаскадных турбореактивных двигателей самолета.
Следует уточнить, что в данном документе включение (выключение) или синхронизация двигателя означает включение (выключение) логических схем, управляющих двигателем, то есть переключение из одного состояния в другое состояние до тех пор, пока, например, во включенном состоянии (далее - 16) показатель синхронизации двигателей (например скорость N1 вращения их каскадов низкого давления) не приведет к подстройке скорости.
Соответственно «включение» и «выключение» двигателя (или синхронизации) означает, что разница между скоростями соответственно каскадов НД и/или соответственно каскадов ВД будет соответственно одинаковой или различной (при следовании алгоритму, приведенному на фиг. 5).
По существу, небольшое расхождение между скоростью вращения двигателей самолета может вызвать нежелательную вибрацию и акустический шум. Известна синхронизация каскадов низкого давления (НД) или каскадов высокого давления (ВД) двухкаскадных двигателей самолета для уменьшения вибрации, ощущаемой в кабине, а также снижения шума с повышением, таким образом, комфорта пассажиров.
Однако такие действия по синхронизации направлены только на удовлетворение требований комфорта и не должны приводить к возникновению рисков для двигателей или самолета. Соответственно, при несоблюдении требований безопасности синхронизация двигателя выключается, даже если пилот подает запрос на включение синхронизации и все условия для включения синхронизации удовлетворены. Например, такими условиями безопасности являются пределы величин, которые не должны достигаться для обеспечения возможности включения и поддержания синхронизации. Например, эти величины представляют собой минимальные и максимальные значения скоростей для ротора каскада ВД в каждом двигателе (N2min, N2max), максимальное статическое давление в камере сгорания каждого двигателя (Ps3max) и нижняя (опасность потери тяги) и верхняя (опасность помпажа) предельные величины размерного отношения Q каждого двигателя (Q=расход топлива/Ps3max).
Однако невозможно проверять все условия безопасности каждый раз, когда пилот подает запрос на включение синхронизации, так как это может негативно сказаться на эффективности двигателя, и по этой причине синхронизация не может быть включена только по простому запросу пилота и требует проверки дополнительных условий.
В патентном документе FR 2639444 описан способ синхронизации ведомого двигателя и ведущего двигателя на самолете, причем указанные двигатели являются двухкаскадными турбореактивными двигателями, каждый из которых содержит ротор вентилятора и ротор газогенератора. Скорость вращения вентилятора или ротора каскада низкого давления ведомого двигателя (обозначенная как N1) и скорость вращения газогенератора или ротора каскада высокого давления ведущего двигателя (обозначенная как N2) могут управляться путем регулирования скорости, с которой топливо подается в двигатель, путем изменения установки углов лопаток статора двигателя и т.д.
В данном изобретении синхронизация включается, когда разность между вышеуказанными скоростями вентиляторов (ΔN1) двух двигателей становится меньше 100 об/мин, и выключается, когда такая разница превосходит указанное значение, или когда один из двигателей останавливается или глохнет, или когда не регистрируется один из сигналов N1, или когда отношение PLA/N2 ведомого двигателя превосходит определенный предел (где PLA означает Угол Уровня Мощности (Power Level Angle), соответствующий положению органов управления в кабине самолета). Пилот самолета получает информацию о том, что синхронизация была выключена. Синхронизация автоматически включается снова, когда разность (ΔN1) падает ниже значения 100 об/мин. Этот способ полностью автоматизирован и не требует специальной команды от пилота самолета.
Недостаток такой синхронизации заключается в том, что она полностью автоматизирована. Фактически, синхронизация двигателя снова включается, когда все условия опять выполняются, без какого-либо специального запроса от пилота самолета. Однако такие условия могут повлечь за собой риск для двигателей или для самолета (например риск помпажа или заброса оборотов двигателя), и автоматическое возобновление синхронизации двигателя может представлять опасность. Более того, когда данные условия не влекут никакого риска для двигателей или самолета (например, в случае переходного режима скорости двигателей), запрос подтверждения от пилота перед повторным включением синхронизации не представляется желательным, так как это может привести к тому, что пилот отвлечется и не будет уделять должного внимания возможным многочисленным изменениям, вызванным такими условиями (наличие/отсутствие колебаний топлива).
Кроме того, при автоматическом включении синхронизации значение уставки для скорости N1 (или N2) ведомого двигателя выравнивается относительно значения скорости ведущего двигателя и, таким образом, отклоняется от ее исходной уставки, которая была рассчитана для оптимального обеспечения требуемой тяги. Вследствие синхронизации скорости двигателя тяга от этого двигателя больше не является оптимальной: она либо увеличена, в результате чего уменьшается срок службы двигателя, либо уменьшена, в результате чего пилоту необходимо изменить положение органов управления, что имеет те же последствия. Это является главным недостатком.
Для исправления такого недостатка в патентном документе WO 2013/034839 предложен способ синхронизации двигателей самолета с использованием по меньшей мере одной активационной логической схемы для каждого двигателя, предназначенной для проверки условий безопасности и/или включения для применения синхронизации, причем каждая активационная логическая схема задает по меньшей мере выключенное состояние, дежурное состояние и включенное состояние и переключается из указанных состояний и в них, при этом для каждого двигателя способ включает:
- переключение активационной логической схемы из выключенного состояния в дежурное состояние при подаче пилотом самолета команды на включение,
- периодическую проверку условий безопасности и/или включения в отношении указанных состояний для определения факта удовлетворения или неудовлетворения указанных условий,
- переключение активационной логической схемы из дежурного состояния во включенное состояние при удовлетворении некоторых условий безопасности и/или включения и
- переключение активационной логической схемы из включенного состояния или дежурного состояния в выключенное состояние при подаче пилотом команды на выключение или при неудовлетворении некоторых условий безопасности.
Таким образом, каждая активационная логическая схема имеет по меньшей мере одно активационное состояние дополнительной синхронизации по сравнению с предложенными в патентном документе FR 2639444, в котором синхронизация либо выключена (режим OFF), либо включена (режим ON), при этом синхронизация также может переходить в режиме OFF по меньшей мере в дежурное состояние в дополнение к выключенному состоянию.
Несмотря на то что данное решение может быть целесообразным, оно не препятствует возможности включения только одного двигателя.
Это может повлиять на синхронизацию, или даже на правильную работу двигателей, или даже на безопасность полета.
Для устранения этой проблемы в данном изобретении предложено следующее:
- переключение активационной логической схемы из дежурного состояния во включенное состояние выполняют через первое и затем второе последовательные промежуточные состояния указанной схемы,
- для каждого случая переключения активационной логической схемы из второго промежуточного состояния во включенное состояние обеспечивают обмен такой информацией между двигателями по цифровой линии связи, так что:
- переключение активационной логической схемы одного из двигателей во включенное состояние требует удовлетворения всех условий безопасности и включения другого двигателя (других двигателей),
- и в случае переключения активационной логической схемы одного из двигателей в выключенное состояние активационная логическая схема другого двигателя (других двигателей) автоматически делает то же самое, и
- для каждого двигателя переключение активационной логической схемы из дежурного состояния в первое и затем второе промежуточные состояния происходит автоматически при удовлетворении первой части условий безопасности и/или включения и затем их второй части, отличной от первой.
Разумеется, это означает, что учитывают состояние синхронизации для каждого двигателя: включенная синхронизация, дежурное состояние на первом двигателе, но не на втором.
Когда двигатели синхронизированы, если в одном двигателе имеется проблема, но условие включения перестало выполняться до обнаружения неисправности, выключение синхронизации только на вышедшем из строя двигателя, таким образом, исключено.
Также предпочтительно, чтобы переключение активационной логической схемы из второго промежуточного состояния во включенное состояние происходило автоматически на одном из двигателей, если другой двигатель (другие двигатели) находится (находятся) в указанном втором промежуточном состоянии или во включенном состоянии.
Таким образом, синхронизация может быть включена на двигателях одновременно. Переключение к такому второму промежуточному состоянию является априори переходным процессом для программного обеспечения.
Кроме того, предпочтительно:
- когда активационная логическая схема находится в выключенном состоянии, пилотом должна быть подана команда на переключение указанной схемы в дежурное состояние, и/или
- переключение активационной логической схемы из любого из первого промежуточного состояния, второго промежуточного состояния и дежурного состояния в выключенное состояние должно выполняться при подаче пилотом команды на выключение.
Таким образом, оптимизирована безопасность.
Кроме того, также предпочтительно, если периодическая проверка условий безопасности и/или включения показывает:
- что указанная вторая часть условий или данные, относящиеся к включенному состоянию активационной логической схемы одного из двигателей, посланные к другому двигателю, показывают, что его активационная логическая схема находится в первом промежуточном состоянии, тогда как активационная логическая схема другого двигателя находится во включенном состоянии, то такая схема также переключается в первое промежуточное состояние, и/или
- что указанная первая часть условий больше не удовлетворяется для по меньшей мере одного из двигателей, тогда как активационная логическая схема находится в первом промежуточном состоянии, то в этом случае указанная схема переключается в дежурное состояние.
Также предпочтительно условия безопасности должны отличаться от условий включения и должны удовлетворяться для защиты двигателей и самолета. Такими условиями безопасности являются, например, отсутствие помпажа двигателей, отсутствие заброса оборотов двигателей, отсутствие превышения или недостаточности тяги двигателей, отсутствие серьезной поломки двигателей и т.д. Такие условия обеспечивают, например, возможность предотвращения возникновения в правильно работающем двигателе поведения, свойственного вышедшему из строя двигателю.
Проще говоря, условия эффективной и безопасной работы заключаются в следующем:
- условия безопасности представляют собой условия, которые по меньшей мере требуются для переключения активационной логической схемы из дежурного состояния в первое промежуточное состояние,
- и условия включения представляют собой условия, которые по меньшей мере требуются для переключения активационной логической схемы из первого во второе промежуточное состояние и ее последующего автоматического включения при условии, что двигатели:
- находятся в указанном втором промежуточном состоянии (условие «ready to activate» (готовность к включению)),
- находятся в состоянии включенной синхронизации (условие «XSyncState» (состояние синхронизации)).
Условия для включения синхронизации должны быть удовлетворены для оптимизации работы двигателей, так как синхронизация не приспособлена для всех рабочих скоростей и может различаться в зависимости от типа (ВД или НД) скорости синхронизированных двигателей. Условиями включения являются, например, заданная разница между уставками скоростей каскадов НД и/или ВД двигателей, заданная разница между скоростью каскадов НД и/или ВД двигателей, заданная разница между уставкой и измеренной скоростью каскадов НД и/или ВД двигателя, эксплуатационная скорость, переходная скорость, скорость холостого хода или различные скорости при взлете и посадке.
В случае, когда активационная логическая схема находится в дежурном или включенном состоянии, пилотом может быть подана команда на выключение. Однако переключение из включенного или дежурного состояния в выключенное состояние может быть автоматическим, когда по меньшей мере некоторые условия безопасности не удовлетворены.
Таким образом, существуют два типа включения и повторного включения: один автоматический, а второй - по запросу пилота самолета. Автоматическое повторное включение имеет место в случае изменения только условий включения (условия безопасности все еще удовлетворены), и повторное включение должно быть подтверждено пилотом в случае, когда изменились условия безопасности (при любом результате проверки условий включения).
На практике в кабине имеется по меньшей мере одна кнопка включения синхронизации, в частности две кнопки, когда двигатели представляют собой двигатели двухкаскадного типа (с каскадами НД и ВД). Первая кнопка предназначена для включения синхронизации каскадов НД двигателей (N1Sync), а вторая кнопка предназначена для включения синхронизации каскадов ВД двигателей (N2Sync). Каждая кнопка может иметь два положения, положение ON (ВКЛ, например, утопленное и подсвеченное) и положение OFF (ВЫКЛ, отжатое и не подсвеченное). Пилот не может запросить включение синхронизации обоих каскадов одновременно. Если пилот нажимает первую кнопку для ее утапливания в то время, как вторая кнопка уже находится в утопленном положении, вторая кнопка автоматически высвобождается для возвращения в отжатое положение.
Затем пилот самолета должен нажать одну из указанных кнопок для подачи запроса на включение синхронизации, которая после этого переключается из выключенного состояния в дежурное состояние.
Как пояснено выше, синхронизация переключается из дежурного состояния во включенное состояние через первое и затем второе последовательные переходные промежуточные состояния, когда удовлетворены по меньшей мере некоторые условия безопасности и/или включения.
Второе промежуточное состояние активационной логической схемы автоматически переключается во включенное состояние при условии, что другой двигатель (другие двигатели) находится (находятся) в указанном втором промежуточном состоянии или включенном состоянии, причем такие данные отмечаются и передаются. Если пилот снова нажимает кнопку для отмены команды, активационная логическая схема возвращается в выключенное состояние. Активационная логическая схема также переключается в выключенное состояние, когда не удовлетворены по меньшей мере некоторые условия безопасности. В этом случае активационная логическая схема находится в выключенном состоянии, даже несмотря на то что кнопка в кабине может все еще находиться в утопленном и подсвеченном состоянии. В этом случае пилоту необходимо нажать кнопку дважды: сначала для ее возвращения в отжатое положение, а затем - опять в утопленное положение для переключения активационной логической схемы в дежурное состояние. После этого для повторного запуска синхронизации требуется команда от пилота.
Средства для реализации способа согласно изобретению могут содержать, например, электронную микросхему, в которой закодировано по меньшей мере одно из активационных логических схем и логических операторов (И, ИЛИ, НЕТ и т.д.), и средства для суммирования, сравнения, определения передних фронтов сигналов, условий и т.д.
Условия для применения и поддержания синхронизации могут проверяться с регулярными интервалами, например, раз в 30 мс.
Следует понимать, что при нахождении активационной логической схемы в первом или втором промежуточном состоянии она выключена.
Если двигатели представляют собой двухкаскадные двигатели и содержат один каскад низкого давления (НД) и один каскад высокого давления (ВД), к условиям для применения синхронизации каскадов НД и/или ВД могут, например, относиться одно или более из следующих условий:
- А1: разница между уставками для скоростей роторов НД или ВД двигателей составляет меньше 10%,
- А2: не обнаружено неисправности, которая может оказать влияние на правильную работу двигателей или создать риски для самолета,
- A3: разница между измеренными скоростями роторов НД или ВД двигателей составляет меньше 10%,
- А': разница между уставкой скорости и измеренной скоростью роторов НД или ВД составляет меньше 10%,
- В: по меньшей мере один из двигателей находится на холостом ходу, и
- С: самолет в полете и не производит ни взлета, ни набора высоты. Активационная логическая схема может переключаться из включенного
состояния в выключенное состояние, когда условия А1, А2 и, возможно, A3 (для синхронизации ВД) не удовлетворены. Активационная логическая схема может быть переключена из включенного состояния в дежурное состояние, когда условия С не удовлетворены.
Таким образом, по команде пилота отдается предпочтение логической схеме с управлением по верхнему фронту сигнала, что обеспечивает возможность не выполнять запуск активационной логической схемы, если она была выключена и если вышеуказанная кнопка в кабине все еще нажата.
Изобретение станет более понятным, а его другие подробности, характеристики и преимущества - очевидными при прочтении нижеследующего описания, приведенного в качестве не ограничивающего примера со ссылкой к прилагаемые чертежи, на которых:
- фиг. 1 изображает диаграмму, показывающую известную активационную логическую схему для синхронизации роторов каскадов низкого давления в двигателях самолета,
- фиг. 2 изображает очень схематичный график, показывающий рост синхронизационных уставок для роторов НД двигателей самолета в соответствии со скоростью двигателей в уровне техники,
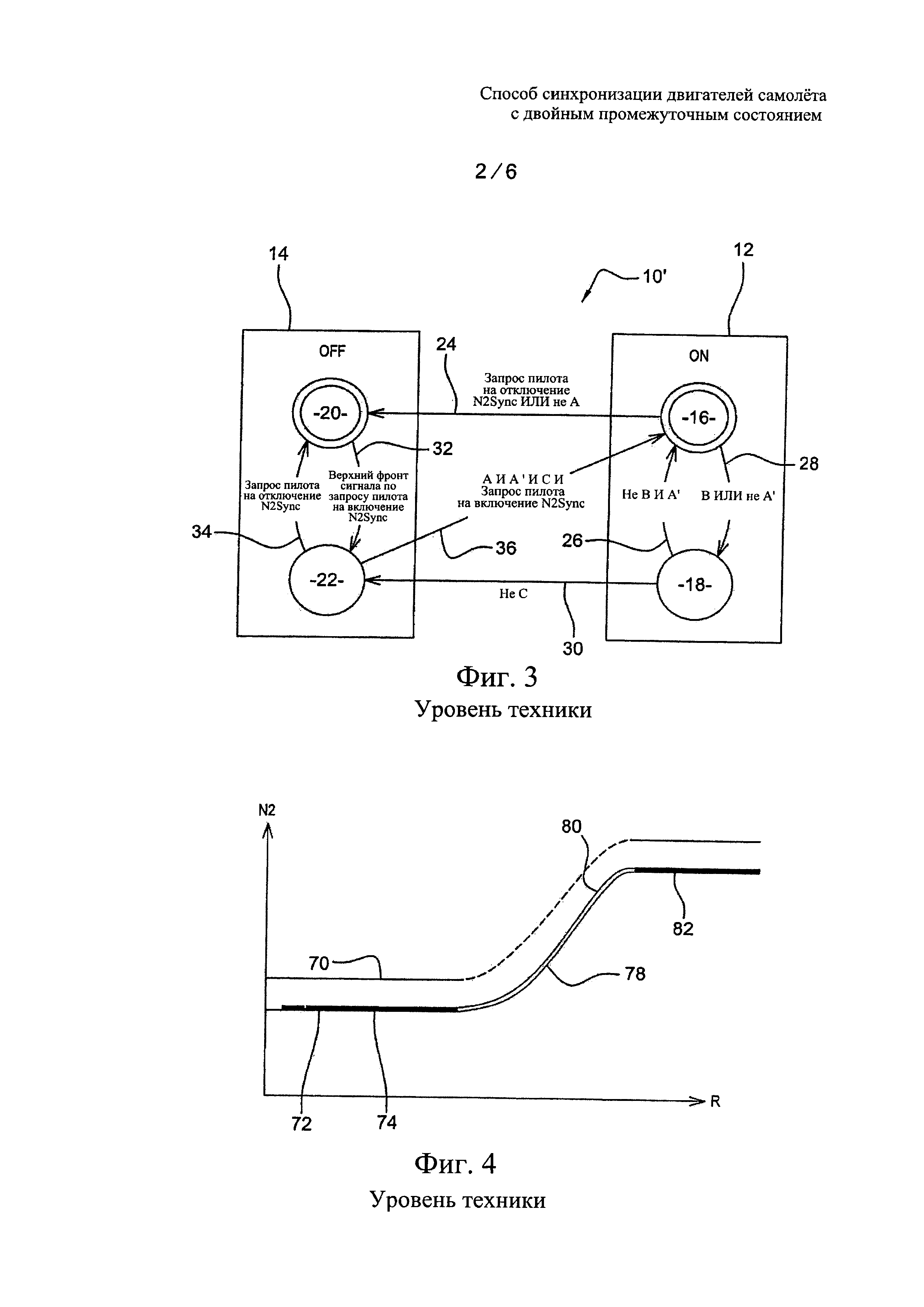
- фиг. 3 изображает диаграмму, также показывающую известную активационную логическую схему для синхронизации роторов каскадов высокого давления в двигателях самолета,
- фиг. 4 изображает очень схематичный график, соответствующий уровню техники и показывающий рост синхронизационных уставок для роторов ВД двигателей самолета в соответствии со скоростью двигателей, и
- фиг. 5 изображает диаграмму, показывающую активационную логическую схему согласно изобретению для синхронизации роторов двигателей самолета, которая, в частности, обеспечивает возможность учета состояния взаимной синхронизации двигателей. Такая логическая схема вводится в каждый компьютер, связанный с каждым синхронизируемым двигателем.
Диаграммы, показанные на фиг. 1 и 3, изображают известную активационную логическую схему 10 и 10', выполненную согласно патентному документу WO 2013/034839 и предназначенную для синхронизации двигателей самолета, в частности двухкаскадных двигателей, таких как турбореактивные или турбовинтовые двигатели. Диаграмма на фиг. 1 изображает активационную логическую схему 10 для синхронизации роторов каскадов низкого давления (НД) двигателей, тогда как диаграмма на фиг. 3 изображает активационную логическую схему 10' для синхронизации роторов каскадов высокого давления (ВД) двигателей.
В каждой схеме 10, 10' синхронизация может быть в режиме ON (ВКЛ, представлен прямоугольником 12) или в режиме OFF (ВЫКЛ, представлен прямоугольником 14). В изображенном примере схемы 10, 10' задают четыре состояния включения синхронизации: два состояния в режиме ON, (гарантированное включенное состояние 16 и негарантированное включенное состояние 18) и два состояния в режиме OFF (выключенное состояние 20 и дежурное состояние 22).
Стрелки 24-36 показывают возможные переключения из одного состояния синхронизации в другое состояние синхронизации, причем некоторые такие изменения происходят автоматически, как только условия для применения синхронизации изменяются, тогда как другие изменения требуют подачи пилотом самолета команды на включение или выключение.
Имеется два типа условий для применения синхронизации: условия безопасности, предназначенные для защиты двигателей и самолета, и условия включения, предназначенные для оптимизации работы двигателей.
В варианте выполнения, изображенном на чертежах, схемы 10, 10' содержат четыре условия, соответственно обозначенные как А, А', В и С. Условия А, А', В и С схемы 10 для синхронизации каскадов НД не все идентичны условиям схемы 10' для синхронизации каскадов ВД.
В случае синхронизации каскадов НД (фиг. 1) условия А содержат условие А1 включения и условие А2 безопасности. Условие А1 включения имеет следующий вид:
|ΔN1dmd_PWM|<5%
и означает, что разница между уставками скорости N1 для каскадов НД двигателей (по абсолютной величине) должна составлять меньше 5%. ΔN1 представляет собой разницу между скоростями роторов НД, «dmd» означает, что принята во внимание уставка для каждого двигателя, a «PWM» означает, что данная уставка является характерной для каждого двигателя и вычисляется с помощью функции Power Management (Управление Мощностью) в компьютере каждого двигателя (указанная функция вычисляет уставки N1, соответствующие положению органов управления и значениям других параметров). Если двигатели работают на сильно различающихся скоростях НД (А1>5%, например, потому что органы управления в кабине находятся в разных положениях, или потому что из-за слишком большой разницы между скоростями N1 двигателей уставки слишком отличаются для создания двигателями одинаковой тяги), то условие А1 не удовлетворено. Различие между двумя исходными уставками отслеживается. Соответственно, синхронизация может быть выключена, если органы управления двигателями находятся в различных положениях (то есть если они удалены друг от друга).
Условие А2 для включения заключается в отсутствии обнаружения неисправности, которая могла бы повредить двигатели или повлечь риски для двигателей или для самолета и пассажиров. Фактически, поскольку синхронизация является функцией, обеспечивающей комфорт, на риск не идут и синхронизацию выключают в случае нежелательного явления в двигателе (помпажа, заброса оборотов, превышения или недостаточности тяги и т.д.) или его отказа, в частности, для предотвращения возникновения в правильно работающем двигателе поведения, свойственного вышедшему из строя двигателю.
Условия А1 и А2 являются кумулятивными и должны быть удовлетворены оба для того, чтобы условия А считались выполненными.
Как указано стрелкой 24, такие условия А должны быть удовлетворены для включения синхронизации, то есть для перехода синхронизации в режим ON. Если такие условия А не удовлетворены (или удовлетворены условия «не А»), синхронизация автоматически выключается и переключается из режима ON (из гарантированного включенного состояния 16 или негарантированного включенного состояния 18) в режим OFF (выключенное состояние 20). Соответственно, такие условия А, которые содержат как условие А1 включения, так и условие А2 безопасности являются необходимыми для включения синхронизации вне зависимости от того, какие команды поданы пилотом. Таким образом, безопасность ставится выше комфорта, достигаемого при синхронизации двигателей самолета.
Как указано выше, условия А содержат два кумулятивных условия А1 и А2. Если одно из них больше не удовлетворяется, синхронизация выключается, независимо от того, находится ли она в гарантированном включенном или негарантированном включенном состоянии. Фактически, в случае поломки или отказа двигателя пилот должен среагировать и решить, хочет ли он/она повторно включить синхронизацию после устранения отказа. В случае различных уставок ответственность априори лежит на пилоте, и, соответственно, он/она должен/должна решить, производить повторное включение синхронизации или нет.
Как указано на стрелке 24, переключение из включенного (негарантированного 18 или гарантированного 16) состояния в выключенное состояние 20 также может быть следствием команды, данной пилотом самолета, который хочет выключить синхронизацию («No N1Sync Pilot Request»/«Запрос пилота на отключение N1Sync»). Условия «не А» и «Запрос пилота на отключение N1Sync» не являются кумулятивными ввиду оператора OR (ИЛИ). Если любое одно из таких условий удовлетворено, синхронизация может быть выключена.
Условия А' включения содержат два условия А'1 и А'2 включения, которые соответственно имеют следующий вид:
|N1dmd_ctrl1-N1sel1|<5% и
|N1dmd_ctrl2-N1sel2|<5%,
из чего следует, что различие между уставкой («dmd» означает «затребованная») и измеренной величиной («sel» означает «выбранная») скорости N1 каждого каскада НД (по абсолютной величине) должна составлять меньше 5%. Символы «ctrl» означают, что текущая контрольная уставка, то есть стандартная усредненная уставка, принята во внимание, если двигатели синхронизированы. Эти условия удовлетворены, когда оба двигателя работают с установившейся скоростью и, соответственно, не работают с переходной скоростью. И наоборот, условия «не А» выполнены, когда по меньшей мере один из двигателей работает с переходной скоростью.
Такие условия А' должны быть обязательно удовлетворены для включения синхронизации. Однако когда они перестают выполняться, синхронизация не обязательно выключается, как пояснено ниже.
Условия В включения удовлетворены, если по меньшей мере один из двигателей находится на холостом ходу. Эти условия удобны для переключения из гарантированного включенного состояния в негарантированное включенное состояние и, наоборот, когда самолет управляется контуром холостого хода и органы управления находятся в положении холостого хода.
Как указано стрелкой 26, активационная логическая схема переключается из состояния 18 в состояние 16, если вышеуказанные условия А' удовлетворены и условия В не удовлетворены (или если удовлетворены условия «не В»). Активационная логическая схема переключается из состояния 16 в состояние 18, если любое из этих условий В удовлетворено и условия А' не удовлетворены (или, наоборот, если условия «не А» удовлетворены - стрелка 28).
Другими словами, активационная логическая схема переключается из состояния 18 в состояние 16, если двигатели не находятся на холостом ходу и если различие между уставками и измеренными величинами скорости N1 в каждом двигателе меньше 5%.
Например, когда двигатели работают на переходной скорости, условия А' не удовлетворены. Активационная логическая схема переключается в негарантированное включенное состояние, так как отключение синхронизации будет бесполезным, поскольку больше не обеспечивается контроль через скорости N1. Тот факт, что заданная скорость N1 является уставкой, характерной для каждого двигателя, или стандартной заданной величиной синхронизации, не играет большого значения. Когда условия А' вновь удовлетворяются в конце переходного состояния, синхронизация автоматически возвращается в гарантированно включенное состояние.
На фиг. 2 показан рост скорости N1 каскадов НД двигателей самолета при изменении скоростей двигателей.
В изображенном примере самолет оснащен только двумя двигателями, и график, показанный на фиг. 2, содержит две кривые 50 и 52, представляющие уставки N1 скорости, характерные для каждого двигателя, то есть уставки, которые обусловлены положениями органов управления, заданными пилотом самолета. Кривые 50 и 52 имеют ступенчатую форму, и каждая из них имеет горизонтальную первую часть, представляющую постоянную уставку N1, поскольку скорость R1 двигателя стабилизирована, вертикальную часть, представляющую изменение уставки N1 вследствие того, что скорость R2 является переходной, и новую горизонтальную часть, представляющую постоянную уставку N1, поскольку скорость R3 опять стабилизирована.
Изменение от установившейся скорости R1 к переходной скорости R2 происходит вследствие перемещения органов управления пилотом. Как можно видеть на фиг. 2, уставки N1, характерные для каждого из двигателей, несколько отличаются для обеспечения получения одинаковой тяги, даже несмотря на то что органы управления двигателями находятся в одинаковом положении. Фактически, можно отметить, что два двигателя самолета могут работать с несколько различной скоростью для создания одинаковой тяги
Уставка N1 для синхронизации роторов НД равна среднему значению уставок N1, характерных для каждого двигателя. Таким образом, скорости N1 двигателей соответствуют этой уставке, которая упрощенно представлена на фиг. 2 жирной непрерывной линией 54, расположенной между линиями 50 и 52 в вышеуказанной горизонтальной части таких кривых.
Когда условия А' больше не удовлетворяются, то есть когда двигатели работают с переходной скоростью, синхронизация роторов НД переключается в негарантированное включенное состояние. При переходной скорости каждый двигатель управляется уставкой для dN/dt, которая получена интегрированием от текущей скорости ротора. Таким образом, части кривых 56 и 58 показывают рост скорости N1 ротора НД, который имеет место в каждом двигателе без синхронизации: каждый двигатель начинает работу с текущей скоростью и следует двум кривым, полученным интегрированием их переходных уставок для dN/dt, которые имеют весьма близкие значения. Далее, два двигателя были синхронизированы непосредственно перед переключением в переходный режим. При переключении в переходный режим они имеют почти одинаковую текущую скорость N1 для ротора НД. Следовательно, скорости следуют двум по существу идентичным кривым 62 и 64, происходящим от двух уставок для dN/dt, которые также имеют весьма близкие значения, даже несмотря на то что технически двигатели не работают с одинаковой синхронизационной уставкой. Когда условия А' вновь удовлетворены, активационная логическая схема переключается в гарантированное включенное состояние, и скорости N1 могут быть согласованы со стандартной уставкой для синхронизации роторов НД, которая равна среднему значению уставок, характерных для двигателей (непрерывная жирная линия 60 на фиг. 2).
Условия С включения удовлетворены, когда самолет находится в полете и не производит ни взлета, ни набора высоты. В этом случае органы управления двигателем не выходят за пределы положения «Мах Climb» («Максимальный Подъем»).
Как показано стрелкой 30, такие условия С должны быть удовлетворены для включения синхронизации, то есть для нахождения синхронизации в режиме ON. Когда эти условия С не удовлетворены (или когда удовлетворены условия «не С»), синхронизация автоматически переключается из режима ON (из гарантированного включенного состояния 16 или из негарантированного включенного состояния 18) в режим OFF (дежурное состояние 22). Таким образом, активационная логическая схема не переключается в выключенное состояние и может быть автоматически включена снова без повторной подачи команды пилотом.
Команда от пилота (N1Sync Pilot Request/Запрос пилота на включение N1Sync) необходима для переключения активационной логической схемы из выключенного состояния 20 в дежурное состояние 22 (стрелка 32) путем нажатия соответствующей кнопки (N1Sync) в кабине.
В кабине самолета имеется две кнопки включения синхронизации: первая кнопка (NISync) для включения синхронизации каскадов НД двигателей и вторая кнопка (N2Sync) для включения синхронизации каскадов ВД двигателей. Каждая кнопка может находиться в двух положениях, соответственно ON и OFF. В положении ON кнопка утоплена и подсвечена, тогда как в положении OFF она отжата и подсветка отсутствует. Пилот не может запросить синхронизацию обоих каскадов двигателя одновременно. Если пилот нажимает первую кнопку для ее утапливания в то время, как вторая кнопка уже находится в утопленном положении, вторая кнопка автоматически высвобождается для возвращения в отжатое положение.
Таким образом, команда пилота (Запрос пилота на включение N1Sync) требует приложения давления к кнопке N1Sync для обеспечения ее утапливания и приведения в положение ON.
Другая команда пилота (Запрос пилота на выключение N1Sync) требуется для переключения активационной логической схемы из дежурного состояния 22 в выключенное состояние 20 (стрелка 34) путем нажатия кнопки N1Sync еще раз так, что она возвращается в отжатое положение, или положение OFF.
Как объяснено выше, команда пилота (Запрос пилота на выключение N1Sync) может потребоваться для переключения активационной логической схемы из включенного состояния в выключенное состояние (стрелка 24). Эта команда пилота также требует нажатия кнопки N1Sync с обеспечением ее приведения ее в отжатое положение, или положение OFF.
Когда переключение активационной логической схемы из включенного состояния (16 или 18) в выключенное состояние 20 происходит вследствие неудовлетворения условий А (стрелка 24), указанная схема находится в выключенном состоянии, тогда как кнопка N1Sync все еще находится в отжатом положении, или положении OFF. Для запуска синхронизации (стрелка 32) пилоту следует нажать кнопку дважды: сначала для ее высвобождения, а затем - для ее повторного задействования. Фактически, логической схеме согласно изобретению необходимо зарегистрировать верхний фронт сигнала, вызванного командой пилота, для переключения активационной логической схемы во включенное состояние.
Стрелка 36 представляет переключение активационной логической схемы из дежурного состояния 22 во включенное состояние 16. Для включения синхронизации должны быть удовлетворены условия А, А' и С. Также необходимо, чтобы кнопка N1Sync была в положении ON, или в утопленном положении, которое означает, что пилот уже отдал команду на включение синхронизации (Запрос пилота на включение N1Sync). Эти условия являются кумулятивными, и, соответственно, все они должны быть удовлетворены для включения синхронизации.
В результате для подтверждения и включения синхронизации команды пилота не требуется, когда кнопка N1Sync находится в положении ON, или в утопленном положении, а активационная логическая схема переключилась в дежурное состояние 22, поскольку условия С больше не удовлетворены (стрелка 30). Однако, как обозначено на стрелке 32, команда пилота требуется для повторного запуска синхронизации, которая была переключена в выключенное состояние, поскольку условия А больше не удовлетворены (стрелка 24). Таким образом, повторное включение синхронизации происходит автоматически только при определенных обстоятельствах, что позволяет повысить производительность двигателей и обеспечить защиту двигателей и самолета.
В случае синхронизации каскадов ВД (активационная логическая схема 10' на фиг. 3) условия А содержат два условия А1 и A3 включения и одно условие А2 безопасности. Условия А1 и A3 включения имеют следующий вид:
|ΔN1dmd|<5% и
|ΔN2sel|<5%,
то есть разница между уставками («dmd») для скорости каскадов НД двигателей (по абсолютной величине) должна составлять меньше 5%, и разница между измеренными величинами («sel») для скорости каскадов ВД двигателей (по абсолютной величине) должна составлять меньше 5%. AN1 представляет разницу между скоростями роторов НД, a AN2 представляет разницу между скоростями роторов ВД. Для обеспечения синхронизации каскадов ВД один двигатель считают ведущим двигателем, а другой - ведомым двигателем. Ведомый двигатель принимает измеренную скорость ВД другого двигателя в качестве новой заданной скорости ВД. Отличие уставки «N1dmd_PWM» от уставки «N1dmd_ctrl» не является необходимым, поскольку заданная скорость N1 не изменяется при синхронизации.
Дополнительное условие A3 обеспечивает возможность выключения синхронизации, если различие между двумя измеренными скоростями N2 составляет меньше 5%. Это условие следует проверять вследствие характера указанного типа синхронизации, в которой уставка для ведомого двигателя является мерой для другого двигателя. Это, с одной стороны, исключает чрезмерный рост тяги при включении/выключении синхронизации и, что самое главное, исключает опасность выхода из строя ведущего двигателя или воздействия на него необнаруженного явления, которое может распространиться на исправно работающий ведомый двигатель.
Условием А2 включения остается отсутствие обнаружения неисправности, которая может повредить двигатели или повлечь риски для двигателей или для самолета и пассажиров.
Условия А1, А2 и A3 являются кумулятивными и должны быть удовлетворены все для того, чтобы условия А считались выполненными.
Аналогично синхронизации каскадов НД двигателей, синхронизация каскадов ВД двигателей переключается из включенного (гарантированного 16 или негарантированного 18) состояния в выключенное состояние в зависимости от результатов проверки условий А (стрелка 24).
Как указано на стрелке 24, переключение из включенного состояния 16, 18 в выключенное состояние 20 может быть следствием команды, переданной пилотом самолета, который хочет выключить синхронизацию («Запрос пилота на отключение N1Sync»), путем нажатия кнопки N2Sync для ее приведения в отжатое положение, или положение OFF.
Условия А' включения содержат два кумулятивных условия А'1 и А'2 включения, которые имеют соответственно следующий вид:
|N1dmd1-N1sel1|<5% и
|N1dmd2-N1sel2|<5%
и означают, что значения разницы между уставкой и измеренной величиной для скорости N1 каждого ротора НД (по абсолютной величине) должны составлять меньше 5%.
На фиг. 4 показан рост скорости N2 роторов ВД двигателей самолета, когда скорость двигателя изменяется.
Кривые 70, 72 представляют заданную скорость N2, характерную для каждого двигателя, и каждая из них имеет первую горизонтальную часть, для которой заданная скорость N2 является постоянной в течение периода стабилизированной скорости R1, наклонную часть, для которой заданная скорость N2 возрастает в течение периода переходной скорости R2, и новую горизонтальную часть, для которой заданная скорость N2 является постоянной в течение периода стабилизированной скорости R3.
Положения этих кривых 70 и 72 относительно друг друга обеспечивают возможность идентификации ведущего двигателя для синхронизации каскадов ВД. Ведущим является двигатель, в котором каскад ВД вращается с более низкой скоростью N2 для обеспечения заданной тяги, то есть двигатель, соответствующий кривой 72 на фиг. 4.
Уставка N2 для синхронизации роторов ВД равна уставке, характерной для ведущего двигателя, то есть уставке, соответствующей кривой 72. Эта уставка N2 упрощенно показана на фиг. 4 жирной непрерывной линией 74, которая расположена на кривой 72 в ее вышеуказанной горизонтальной первой части.
При переходной скорости синхронизация роторов ВД переключается в негарантированное включенное состояние. Аналогично синхронизации скоростей N1, скорости N2 каждого двигателя следуют кривым 78 и 80, которые по существу идентичны, поскольку построены по близким значениям уставок dN/dt, полученным интегрированием одной и той же исходной величины. Когда скорость снова стабилизируется (R3), активационная логическая схема переключается в гарантированное включенное состояние и скорости N2 принимают величину уставки N2 для синхронизации роторов ВД, которая равна уставке, характерной для ведущего двигателя (жирная непрерывная линия 82 на фиг. 2).
Условия В и С включения схемы 10' для каскадов ВД двигателей идентичны условиям, описанным выше в отношении схемы 10 для каскадов НД двигателей.
Изобретение применимо для синхронизации двух, трех, четырех и даже большего числа двигателей на одном самолете. При синхронизации каскадов НД двигателей двухкаскадного типа синхронизационные уставки N1 могут быть равны среднему значению уставок N1, характерных для различных двигателей. При синхронизации каскадов ВД двигателей уставки N2 для синхронизации предпочтительно являются уставками, характерными для одного из двигателей, рассматриваемого как ведущий, при этом другие двигатели рассматриваются как ведомые двигатели, выполненные с возможностью подстройки под поведение ведущего двигателя (следует уточнить, что в данном варианте выполнения учтены параметры скорости вращения, но не другие параметры двигателя, такие как скорость потока топлива, давления в камере сгорания и/или различия или соотношение давлений на входе и выходе ступени компрессоров).
В любом случае, когда в синхронизации участвуют по меньшей мере два двигателя самолета, как указано выше в описании, может быть желательным исключение включения только одного двигателя, поскольку это может повлиять на синхронизацию и, возможно, на правильную работу двигателей.
На фиг. 5 изображен предложенный в данном изобретении вариант подходящих логических схем 100 для включения синхронизации двигателей самолета. Более конкретно, этот случай подходит для синхронизации роторов каскадов высокого давления или низкого давления в двигателях самолета.
На фиг. 5 использованы те же номера позиций, что и на фиг. 1 и/или фиг. 3, когда состояния или переключения из одного состояния в другое совпадают или отличаются. Соответственно, различия между различными решениями объяснены ниже.
На фиг. 5 изображено только (полностью) включенное состояние 16, при котором синхронизация включена (см. состояние 18 на фиг. 1 или фиг. 3) и которое, таким образом, направлено на поддержание ее включенной даже при переходных скоростях - при ускорении или торможении - или при скоростях холостого хода.
Более конкретно, такое изменение обусловлено тем фактом, что при переходной скорости разница между уставкой N1 и измеренным значением N1, соответствующая условию А', достигается быстро, и, следовательно логические схемы пребывают в данном состоянии 18 в течение очень малого времени.
Кроме того, было решено учитывать состояние функции синхронизации различных двигателей самолета, управляющих полетом, для гарантии того, что не может быть включен только один двигатель и что, если один двигатель выключен, другой также будет выключен. Следует отметить, что ниже при упоминании переключения «указанной» активационной логической схемы из одного состояния в другое состояние это относится к одному двигателю, при этом каждый компьютер двигателя хранит такую активационную логическую схему, и между компьютерами происходит обмен данными.
Таким образом, для каждого двигателя активационная логическая схема автоматически переключается из дежурного состояния 22 во включенное состояние 16 последовательно через первое 38 и затем второе 39 промежуточные состояния активационной логической схемы, вне зависимости от того, синхронизированы ли каскады НД (N1Sync) или ВД (N2Sync) двигателей.
Перед каждым переключением активационной логической схемы из второго промежуточного состояния 39 во включенное состояние или при таком переключении должны быть выполнены следующие действия:
- учтено состояние включения синхронизации для каждого двигателя
- и произведен обмен этими данными между двигателями.
Для обмена данными, относящимися к состоянию синхронизационной логической схемы, связанной с двигателем, двигатели могут использовать цифровое соединение ARINC (встроенной авиационной радиостанции). Подробности изложены ниже.
Любое переключение (стрелка 40) активационной логической схемы из второго промежуточного состояния 39 во включенное состояние 16, таким образом, зависит для каждого двигателя от того, находится ли он в состоянии 16 или 39, при этом между двигателями происходит обмен такими данными.
В отсутствие вышеуказанного условия для обмена (то есть с учетом ситуации для всех участвующих двигателей), когда двигатели синхронизированы и в одном из них имеется проблема, но условие включения для этого двигателя перестало выполняться до обнаружения неисправности во время автоматической периодической проверки, синхронизация будет выключена только для неисправного двигателя. В этом случае синхронизация другого двигателя будет продолжаться. Несмотря на то что это не вызывает никаких проблем с точки зрения работы, экран, доступный для пилота, будет отличаться для разных двигателей, что может сбивать с толку.
Априори переключение в такое второе промежуточное состояние 39 является переходным для программного обеспечения, оно быстро изменится, при этом синхронизация одновременно включится для обоих двигателей (переключение 40), если, как отмечено на фиг. 5, другой двигатель (другие двигатели) в то же время находится (находятся):
- в указанном втором промежуточном состоянии 39 (условие «готовность к включению»),
- или в состоянии 16 включенной синхронизации (условие «XSyncState» (состояние синхронизации)).
Если при переключении активационной логической схемы во включенное состояние 16 на всех двигателях для (по меньшей мере одного из) двигателей больше не удовлетворяются (предпочтительно только) условия включения (условия В на фиг. 5, соответственно, предпочтительно за исключением условий безопасности) или данные, относящиеся к состоянию включения синхронизации такого двигателя, посланные другому двигателю (двигателям) через цифровые соединения, свидетельствуют о том, что его активационная логическая схема находится в первом промежуточном состоянии 38, тогда как активационная логическая схема указанного другого двигателя (двигателей) находится во включенном состоянии 16, то активационная логическая схема такого другого двигателя (двигателей) также предпочтительно должна автоматически переключиться обратно из такого включенного состояния 16 в первое промежуточное состояние 38, см. линию 54.
Следовательно, в таком первом промежуточном состоянии 38 синхронизация больше не будет включена, в отличие от ситуаций, показанных на фиг. 1 и 3, где состояние 18 направлено на поддержание синхронизации включенной во время работы двигателей с переходной скоростью (при ускорении или торможении) или со скоростью холостого хода.
Было обнаружено, что при переходной скорости условие для разницы между уставкой N1 и измеренной скоростью N1, указанное в условии А', может достигаться за очень малое время, так что процесс включения остается в таком состоянии в течение очень малого времени.
Кроме того, при скорости холостого хода, когда синхронизация каскадов НД двигателей (N1Sync) находится во включенном режиме при задействованной вышеуказанной первой кнопке, когда два двигателя связаны, один увеличивает свою скорость N1, а другой уменьшает ее, поскольку обычно является предпочтительным принятие средней уставки в качестве стандартной уставки. Двигатель, которому пришлось уменьшить свою скорость, никогда не сможет переключиться на скорость холостого хода, и, следовательно, в качестве (по меньшей мере одного) условия В включения (помимо безопасности) предпочтительно выбрать условие работы двигателей со скоростью, превышающей скорость холостого хода.
В режиме N2Sync (при задействованной вышеуказанной второй кнопке) скорость холостого хода возможна, если управление ведомым двигателем ведет только к увеличению скорости его вращения. При скорости ниже скорости холостого хода синхронизация также невозможна: на практике двигатель будет работать в другом цикле оперативного управления с более высоким приоритетом.
Таким образом, информирование пилота о невозможности включения синхронизации представляется необходимым. Поэтому негарантированное включенное состояние 18 исключено из решений, представленных на фиг. 1 и 3, в пользу второго промежуточного состояния 39, которое, соответственно, является одним из выключенных (OFF) режимов 14.
После завершения вышеописанных операций выбранная логическая схема обеспечивает следующее:
- переключение активационной логической схемы одного из двигателей в гарантированное включенное состояние 16 (стрелка 40) требует удовлетворения всех условий безопасности и включения для других двигателей,
- если один из двигателей переключается в выключенное состояние (стрелка 24), другие двигатели также автоматически переключатся в такое же состояние, и
- для каждого двигателя активационная логическая схема автоматически переключается (41, затем 42) из дежурного состояния в первое 38 и затем во второе 39 промежуточные состояния, когда указанная первая часть условий безопасности и/или включения и затем их вторая часть, отличная от первой, удовлетворены.
Как отмечено на фиг. 5, если условия А и затем В удовлетворены и, следовательно, соответствуют таким первой и второй частям условий, автоматическое переключение 41 и затем 42 может быть разрешено.
Напротив, если такие (в данном случае В и затем А) условия не удовлетворены (соответственно «НЕ В» и «НЕ А»), это вызовет автоматическое возвращение 46, 44 из второго промежуточного состояния 39 в дежурное состояние 22.
Соответственно, если периодическая проверка условий безопасности и включения показывает, что:
- вторая часть условий, необходимая для достижения состояния 39, больше не удовлетворяется для по меньшей мере одного из двигателей, тогда как активационная логическая схема находится во втором промежуточном состоянии 39, указанная схема переключается в первое промежуточное состояние 38 (см. линию 46),
- первая часть условий больше не удовлетворяется для по меньшей мере одного из двигателей, тогда как активационная логическая схема находится в первом промежуточном состоянии 38, указанная схема затем переключается в дежурное состояние 22 (см. линию 44).
Доказано, что вместо изложенного выше в отношении фиг. 1 или 3, более предпочтительно для безопасности:
- чтобы условия А представляли собой только условия безопасности (которые могут относиться к требованиям для скоростей N1 и N2 и вышеуказанному условию А2),
- чтобы условия В представляли собой только условия включения (которые также могут относиться к скоростям N1 и N2 и вышеуказанному условию С: самолет находится в полете и не производит ни взлета, ни набора высоты).
Что касается условий 24, 32, 34 переключения для решения, показанного на фиг. 5, они остаются такими же, как на фиг. 1 или 3, с той разницей, что для переключения 24 добавлено условие безопасности «Xsynch=deactivated» («состояние синхронизации выключено»), соответствующее данным, согласно которым по меньшей мере один из двигателей перестал удовлетворять по меньшей мере одному из соответствующих основных условий включения, и данные, передаваемые между двигателями, таким образом, должны переключить активационную логическую схему (всех двигателей, управляющих полетом) в выключенное состояние 20.
Как показано на фиг. 5, это условие предпочтительно является альтернативой вышеуказанному условию «НЕ А» и «Запрос пилота на отключение», относящемуся к управляющей команде, переданной пилотом через пилотажную шину для выключения синхронизации.
Как показано на фиг. 5, для обеспечения более безопасной и надежной работы, если периодическая проверка условий безопасности/включения показывает, что первая часть условий (предпочтительно их часть, касающаяся безопасности) больше не удовлетворяется по меньшей мере для одного из двигателей, когда активационная логическая схема находится во втором промежуточном состоянии (39), указанная схема предпочтительно переключается в дежурное состояние 22 (см. линию 48).
Опять же для обеспечения безопасности, в частности, если этап первого промежуточного состояния 38 является достижимым из дежурного состояния 22, только когда удовлетворены все условия безопасности, предпочтительно пилот:
- должен иметь возможность непосредственно переключить активационную логическую схему из второго промежуточного состояния 39 в выключенное состояние 20 (см. линию 50) путем подачи первой команды на выключение и/или
- должен иметь возможность непосредственно переключить активационную логическую схему из первого промежуточного состояния 38 в указанное выключенное состояние 20 (см. линию 52) путем подачи второй команды на выключение.
В более общем смысле, желательно, чтобы пилот мог иметь возможность действовать на каждом этапе синхронизации так, что, в дополнение к вышеуказанному возможному действию на линии 24, происходят переключения (соответственно 52, 50, 34) активационной логической схемы из любого из первого промежуточного состояния 38, второго промежуточного состояния 39 и дежурного состояния 22 в выключенное состояние 20 при подаче пилотом команды на выключение, например, путем нажатия на кнопку.
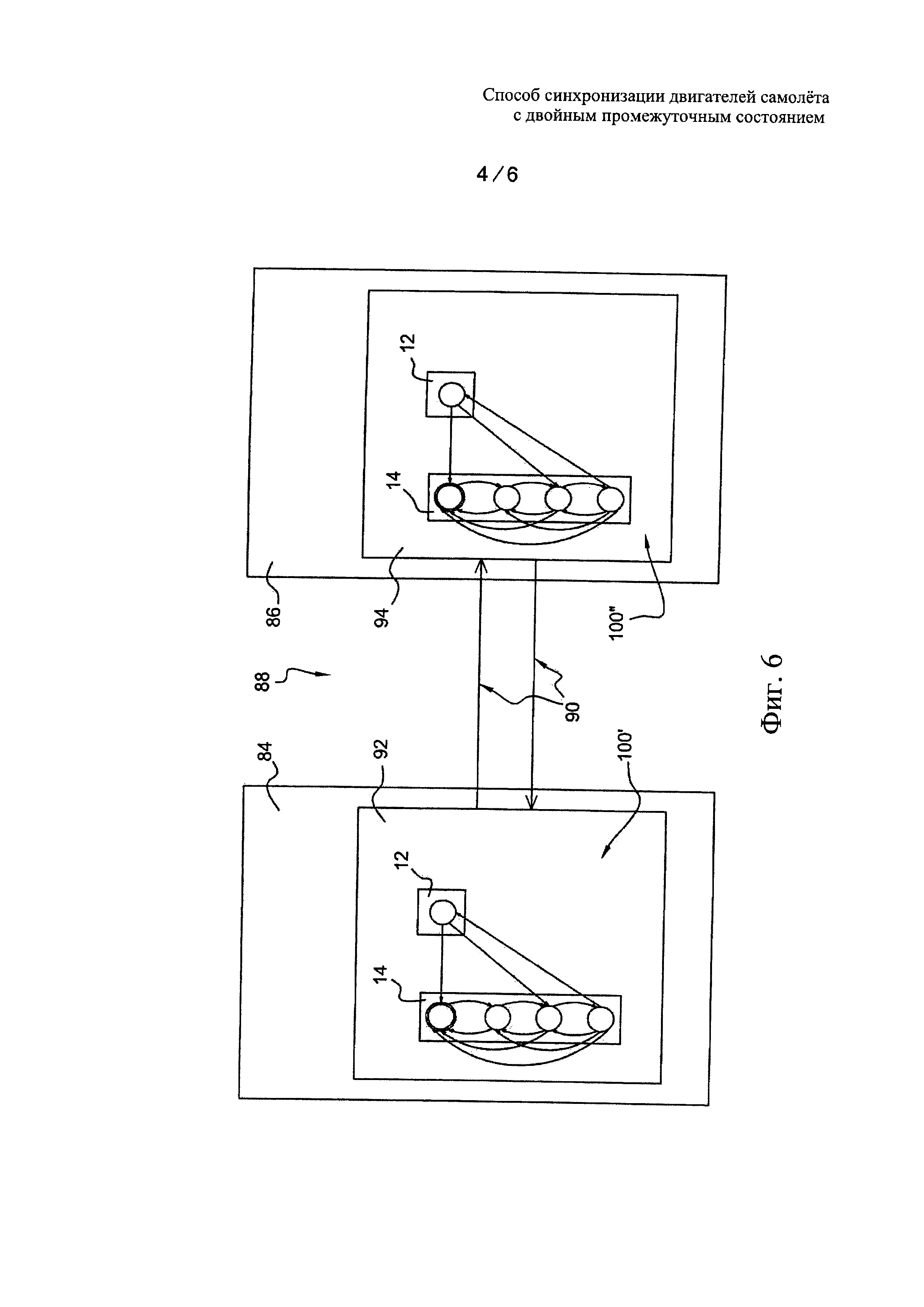
На фиг. 6 схематично изображена структура, обеспечивающая возможность реализации вышеописанного способа синхронизации.
В данном случае предполагается, что необходимо выполнить синхронизацию двух двигателей 84, 86 самолета 88 с использованием одной и той же продублированной активационной логической схемы.
Указанные два двигателя 84, 86, как правило, представляют собой двигатели, расположенные соответственно с левой и с правой стороны фюзеляжа, чаще всего под крыльями самолета, хотя некоторые двигатели расположены вдоль фюзеляжа и прикреплены к нему с обеих его сторон. Возможен вариант с более чем двумя двигателями, в частности с двумя двигателями на каждое крыло, или с одним двигателем на каждом крыле и третьим, центральным двигателем в задней части, над фюзеляжем (например, как в самолете DC10).
Как отмечено выше, цифровая шина, обозначенная здесь номером 90 позиции, например цифровое соединение встроенной авиационной радиостанции, обеспечивает для двигателя (двигателей) (компьютеров) возможность обмена данными, относящимися к состоянию логической схемы синхронизации, связанной с ними.
Таким образом, компьютер (соответственно 92, 94) каждого двигателя, в данном случае первого двигателя 84 и второго двигателя 86, снабжен логической схемой включения синхронизации двигателя, соответственно 100', 100ʺ. Каждая схема 100', 100ʺ, разумеется, является копией общей логической схемы 100, подробно описанной выше. Это подтверждено фиг. 6, и, кроме того, в составе каждой логической схемы присутствуют вышеуказанные элементы 12 и 14.
Каждая логическая схема 100', 100ʺ и их соответствующая синхронизационная функция (то есть функция по синхронизации каскадов низкого давления (НД) или высокого давления (ВД) двухкаскадных двигателей самолета для снижения вибраций и шума, ощущаемых в кабине) содержатся в компьютере, имеющемся на соответствующем двигателе. В данном случае схемы 100', 100ʺ загружены (закодированы) в EEC компьютеры (компьютеры для электронного управления двигателями), соответственно связанные с двигателями 84, 86. При этом цифровая шина 90 обеспечивает обмен данными между компьютерами 92, 94, в частности обмен данными, которые относятся к включенному состоянию каждого двигателя.
Если схемы 100', 100ʺ имеют такие одинаковые структуры (кодирование), содержащиеся в них данные, разумеется, могут быть различными, поскольку включенное состояние может быть априори разным в определенный момент времени в каждом двигателе и поскольку принятие во внимание включенного состояния другого двигателя (данные о котором либо получены путем обмена, либо переданы через цифровое соединение 90) обеспечивает возможность гарантии того, что включенное состояние каждого двигателя будет одинаковым в любой момент времени, то есть, как отмечено выше (для каждого двигателя):
- переключение (40) активационной логической схемы во включенное состояние требует удовлетворения всех условий безопасности и включения, применяемых к другому двигателю (двигателям),
- если активационная логическая схема одного из двигателей переключается в выключенное состояние (20), то активационная логическая схема другого двигателя (двигателей) автоматически делает то же самое, и
- переключение (41, 42) активационной логической схемы из дежурного состояния в первое и затем второе промежуточные состояния происходит автоматически при удовлетворении первой части условий безопасности и/или включения и затем их второй части, отличной от первой.
На фиг. 7 проиллюстрирован пример того, что происходит в этом случае, то есть при общей логической схеме, показанной на фиг. 5, если пилот (например, путем нажатия кнопки) дает команду синхронизировать скорость N1 двигателей, таких как двигатели 84 и 86.
Команда передается (от нажатой кнопки) через соответствующее электрическое соединение к компьютерам 92, 94, которые анализируют соответствующие ситуации для логических схем 100', 100ʺ и производят взаимный обмен данными с помощью цифровой шины 90.
Допустим, что до запроса пилота, то есть до синхронизации, скорости N1 двигателей 84 и 86 составляют соответственно N14=6500 рад/мин и N16=7000 рад/мин (радиан/минута).
Как отмечено выше, скорость N1, заданная для синхронизации роторов НД, может быть равна среднему значению уставок N1, характерных для двигателей (см. фиг. 2, информация с которой применяется далее: толстая непрерывная схематичная линия 54-60, расположенная между кривыми 50 и 52 и их продолжениями).
Если все условия удовлетворены (см. вышеуказанные условия), каждый двигатель переключается во включенное состояние и выбирает в качестве новой уставки арифметическое среднее двух уставок: после синхронизации, в случае подтверждения логическими схемами 100, 100', 100ʺ, общее значение N1=6750 рад/мин.
Теперь допустим, что двигатель 84 выходит из строя, когда двигатели 84, 86 синхронизированы, как в приведенном здесь примере. Такой случай проиллюстрирован на фиг. 8, где показана схема поведения таких двигателей, которые учитывают поведение соответствующих активационных схем 100', 100ʺ.
Если в двигателе 84 происходит такой выход из строя, синхронизационная схема 100' выключает такую функцию (синхронизацию) в двигателе. После этого двигатель 84 возвращается к скорости вращения, которую он имел до синхронизации (здесь N14=6500 рад/мин).
Ранее, если включенное состояние синхронизации не было учтено для двигателя 84 (как в решении, предложенном в патентном документе WO 2013/034839), двигатель 86 оставался бы включенным и продолжал работать со средней скоростью, указанной выше (в данном случае с общей скоростью N1=6750 рад/мин).
Благодаря усовершенствованию, предложенному в изобретении, и обмену информацией или ее передаче от одного двигателя к другому, двигатель 86 также «выключается» при условии, что его логическая схема 100ʺ получает данные, относящиеся к тому факту, что схема 100' переключилась в состояние, отличное от включенного (16). Затем двигатель 86 возвращается к скорости вращения, которую он имел до синхронизации (в данном случае N16=7000 рад/мин).
Соответственно, ситуация становится следующей: N14=6500 рад/мин и N16=7000 рад/мин. Скорости N1 вращения двигателей, таким образом, больше не являются синхронизированными.
Реферат
Изобретение относится к способу синхронизации двигателей самолета. Для синхронизации двигателей используют активационные логические схемы для каждого двигателя. Активационная логическая схема задает три состояния, а именно выключенное, дежурное состояние и включенное состояние. Переключения между разными состояниями производят определенным образом в зависимости от условий безопасности. При переключении в выключенное состояние одного из двигателей все остальные двигатели автоматически делают то же самое. Обеспечивается повышение безопасности при синхронизации двигателей. 5 з.п. ф-лы, 8 ил.
Комментарии