Способ определения параметров колебаний лопаток вращающегося колеса турбомашины и устройство для его осуществления - RU2584723C1
Код документа: RU2584723C1
Чертежи
Описание
Предлагаемое изобретение предназначено для бесконтактного определения амплитуды, частоты и фазы колебаний лопаток турбоагрегатов и может быть использовано при экспериментально-исследовательских, отладочных работах, а также для определения дефектов лопаток турбомашин в процессе их эксплуатации, для индикации усталостной прочности материала лопаток, предупреждения повреждения или обрыва лопаток.
Известен способ и устройство для определения амплитуды, частоты и фазы колебаний лопаток турбоагрегатов, основанный на тензометрировании лопаток (Леонтьев М.К. Тензометрирование в авиационных газотурбинных двигателях. Учебное пособие - Москва: МАИ. 2001, стр. 24-34), заключающийся в том, что на лопатки наклеивают тензодатчики сопротивления, провода от тензодатчиков прокладывают по лопатке, замку, диску колеса и валу и подводят к специальному токосъемному устройству, сигналы с которого усиливаются и подаются на регистрирующую аппаратуру.
Известный способ осуществляется, например, устройством тензометрическая станция А17-Т8, являющейся частью комплекса измерительной аппаратуры, предназначенной для регистрации и обработки сигналов тензодатчиков.
Недостатками известного способа и устройства, его реализующего, являются: ограниченное число одновременно контролируемых лопаток и, как следствие, недостаточная надежность определения параметров колебаний лопаток; трудоемкость препарирования; низкая надежность датчиков, проводки и токосъемников; невозможность тензометрирования каждого экземпляра ГТД.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения параметров колебаний лопаток турбомашины (Заблоцкий И.Е., Коростелев Ю.А., Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М.: Машиностроение. 1977, стр. 33-39), заключающийся в том, что устанавливают в корпусе турбомашины в плоскости вращения рабочего колеса два импульсных бесконтактных датчика, измеряют временные интервалы между импульсами датчиков и по ним вычисляют аналитически амплитуды скоростей и перемещений торцов лопаток, затем также аналитически определяют частоту и фазу (с точностью до знака) колебаний лопаток, статистически находят максимальные перемещения (отклонения от исходного положения) торцов лопаток и по ним определяют амплитуду колебаний торцов лопаток.
Известный способ осуществляется устройством типа ЭЛУРА, ЭМИР (Заблоцкий И.Е., Коростелев Ю.А., Шипов Р.А. Бесконтактные измерения колебаний лопаток турбомашин. М.: Машиностроение. 1977, стр. 89-91; 125-137), содержащим блок периферийных датчиков, оборотный и корневой датчики, возбудители оборотных и корневых датчиков, формирователи импульсов оборотного, периферийного и корневого датчиков, блок преобразования временных интервалов в код, блок управления, выходной регистр и электронную вычислительную машину.
Недостатками известного способа и устройства, его реализующего, являются методически обусловленная низкая точность и достоверность измерений:
- частоты колебаний лопаток, поскольку измеряемый параметр обратно пропорционален квадрату величины окружной скорости торцов лопаток;
- амплитуды колебаний, поскольку точность ее определения напрямую зависит от количества данных (времени наблюдения) при статистической оценке параметра;
- разности фаз колебаний соседних лопаток в колесе, поскольку для ее определения (с точностью до знака) необходимы одновременные измерения амплитуд колебаний и амплитуд взаимных колебаний лопаток; начальная фаза колебаний каждой из лопаток по известному способу не определяется.
В основу изобретения поставлена задача увеличения точности и достоверности определения амплитуды, частоты и фазы колебаний всех лопаток вращающегося колеса турбомашины.
Для достижения поставленной цели в способе определения параметров колебаний лопаток вращающегося колеса турбомашины устанавливают на неподвижном узле турбомашины оборотный импульсный датчик и напротив него на ее роторе возбудитель - оборотную метку, например, в виде штыря, регистрируют импульсы взаимодействия оборотного импульсного датчика с оборотной меткой, на основании импульсов оборотного датчика определяют период вращения ротора турбомашины, устанавливают в корпусе турбомашины в плоскости вращения контролируемого лопаточного колеса над траекторией движения торцов лопаток неподвижный бесконтактный периферийный датчик, например, вихретоковый, согласно изобретению в переходном или эксплуатационном режиме турбомашины регистрируют информационные (лопаточные) сигналы взаимодействия периферийного датчика с торцами лопаток, на основании данных справочной и технической литературы или экспериментально полученных зависимостей определяют аналитическое выражение, описывающее форму информационного выходного сигнала при взаимодействии конкретного типа периферийного датчика с торцом движущейся в окружном направлении и одновременно колеблющейся лопатки, выбирают для каждого лопаточного информационного сигнала несколько амплитудно-временных отсчетов (по количеству неизвестных параметров полигармонических колебаний лопатки: амплитуда, частота и начальная фаза каждого гармонического колебания), подставляют полученные отсчеты в аналитическое выражение, описывающее форму информационного выходного сигнала, составляют систему нелинейных уравнений (как минимум 3-х при условии моногармонического колебания лопатки), решают систему нелинейных уравнений, используя, например, методы нелинейной аппроксимации и определяют параметры колебаний лопаток.
Для реализации способа в известное устройство, содержащее неподвижный бесконтактный периферийный датчик (ПД), установленный в корпусе турбомашины, неподвижный бесконтактный оборотный датчик (ОД), установленный на неподвижной конструктивной части турбомашины, возбудитель оборотного датчика - оборотная метка (ОМ), установленная на роторе турбомашины, формирователь импульсов оборотного датчика (ФО), формирователь импульсов ПД (ФП), блок преобразования временных интервалов (БПВИ) в код и электронную вычислительную машину (ЭВМ), дополнительно введены аналого-цифровой преобразователь (АЦП), фильтр низких частот (ФНЧ), вход которого подключен к выходу ПД, а выход соединен с информационным входом АЦП и входом ФП, выход ФП подключен к синхронизирующему входу АЦП, цифровые выходы АЦП подключены к первой части входных разрядов цифрового интерфейса ЭВМ, например, PC типа IBM, вторая часть входных разрядов цифрового интерфейса ЭВМ соединена с выходными цифровыми разрядами БПВИ, синхронизирующий вход которого подключен к выходу ФО, а третья и четвертая часть входных разрядов цифрового интерфейса ЭВМ соединена, соответственно, с выходом ФП и ФО, а вход ФО подключен к выходу ОД, ЭВМ является выходным блоком устройства и позволяет получать, запоминать и обрабатывать входную информацию, хранить и выдавать конечную информацию в необходимом для пользователя виде.
Предлагаемое техническое решение обладает новизной, т.к. авторам не известны способы и устройства, содержащие признаки, фигурирующие в предлагаемом изобретении в качестве отличительных.
Увеличение точности и достоверности определения фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины в предлагаемом способе и устройстве, его реализующем, достигается за счет решения системы нелинейных уравнений, с использованием методов нелинейной аппроксимации, составленных с учетом аналитического выражения информационного сигнала и его амплитудно-временных значений, полученных экспериментально и зарегистрированных при взаимодействии периферийного датчика с торцами лопаток.
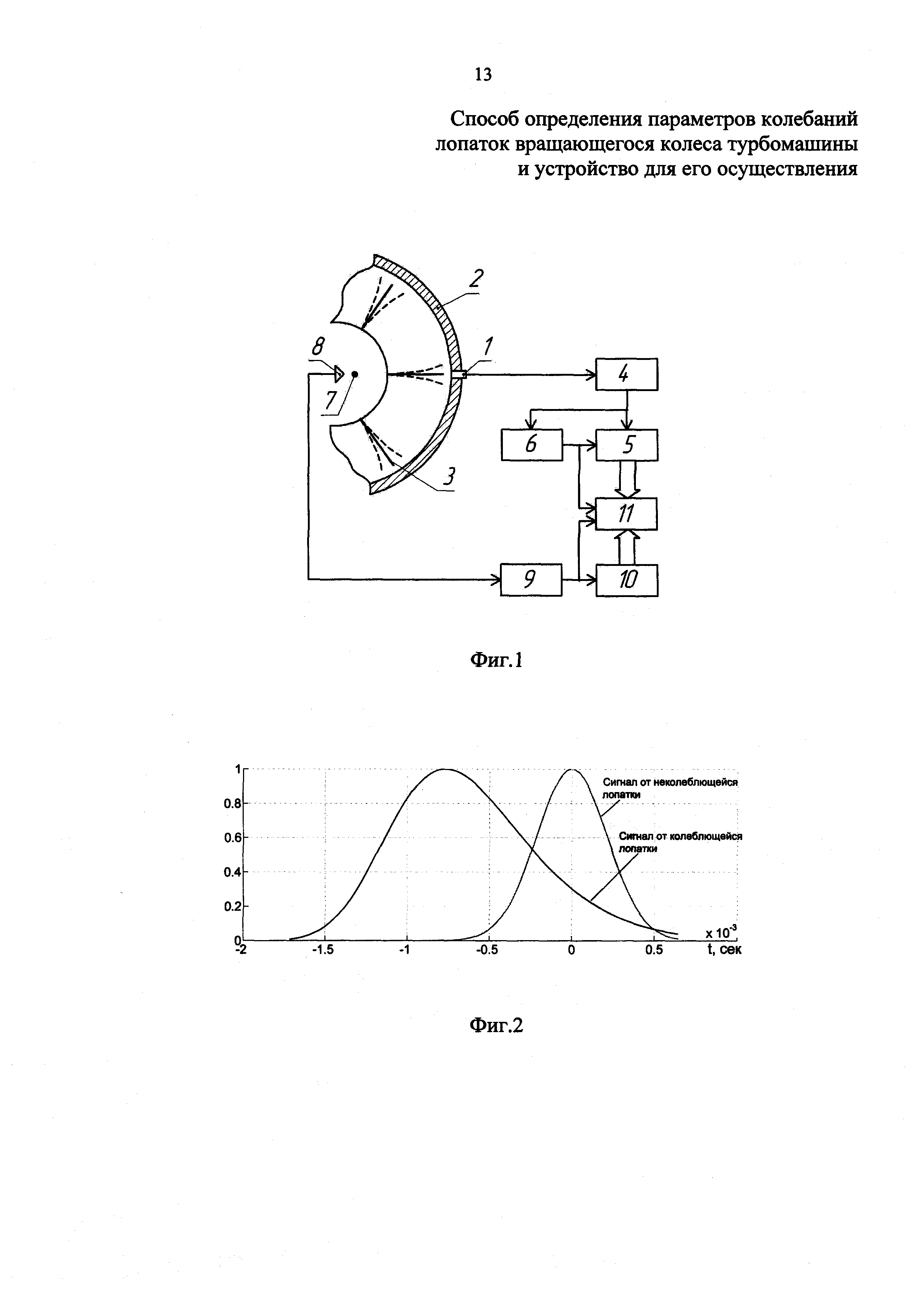
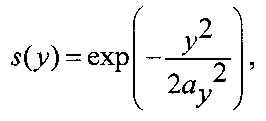
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, реализующего предложенный способ; на фиг. 2 - форма выходных сигналов первичного преобразователя.
Определение фазы, частоты и амплитуды колебаний лопаток вращающегося колеса турбомашины по предложенному способу осуществляется следующим образом.
На диске лопаточного колеса или на роторе турбомашины устанавливают возбудитель оборотного датчика в виде, например, металлического штыря, а на неподвижной детали двигателя напротив траектории движения возбудителя устанавливают неподвижный бесконтактный оборотный датчик, например вихретоковый, регистрируют электрические импульсы, получаемые в результате взаимодействия возбудителя с оборотным датчиком, на основании импульсов оборотного датчика определяют период вращения ротора турбомашины.
Устанавливают в корпусе турбомашины в плоскости вращения контролируемого лопаточного колеса над траекторией движения торцов лопаток неподвижный бесконтактный периферийный датчик, например вихретоковый. В эксплуатационном или переходном режимах работы турбомашины регистрируют информационные сигналы взаимодействия периферийного датчика с торцами лопаток.
На основании данных справочной и технической литературы или экспериментально полученных зависимостей определяют аналитическое выражение, описывающее форму информационного выходного сигнала при взаимодействии конкретного типа первичного преобразователя с торцом движущейся в окружном направлении и одновременно колеблющейся лопатки, например, выходной импульс вихретокового датчика может быть представлен (описан) аналитическим выражением для гауссова (колокольного) импульса (Неразрушающий контроль и диагностика: Справочник / В.В. Клюев, Ф.Р. Соснин, А.В.Ковалев и др.; под ред. В.В. Клюева. 2-е изд., испр. и доп. - М.: Машиностроение, 2003, стр. 401), в аргумент которого введена функциональная зависимость, определяющая закон движения торца лопатки и формирующая форму информационного сигнала, а именно: крутизну фронтов, длительность и амплитуду.
Выбирают для каждого лопаточного информационного сигнала несколько амплитудно-временных отсчетов (по количеству неизвестных параметров полигармонических колебаний лопатки: амплитуда, частота и начальная фаза каждого гармонического колебания), подставляют полученные отсчеты в аналитическое выражение, описывающее форму информационного выходного сигнала, составляют систему нелинейных уравнений (как минимум 3-х при условии моногармонического колебания лопатки), решают систему нелинейных уравнений, используя, например, методы нелинейной аппроксимации и определяют параметры колебаний лопаток.
Пусть, например, периферийный вихретоковый датчик при прохождении возле него торца лопатки генерирует импульс колоколообразной формы, который может быть описан выражением для гауссова импульса (Неразрушающий контроль и диагностика: Справочник / В.В. Клюев, Ф.Р. Соснин, А.В. Ковалев и др.; под ред. В.В. Клюева. 2-е изд., испр. и доп. - М.: Машиностроение, 2003. - 656 с.)
где y - перемещение торца лопатки, ay - параметр гауссова импульса.
Предположим, что лопатка вращающегося лопаточного колеса колеблется по синусоидальному закону с амплитудой А. Тогда перемещение торца лопатки будет иметь две составляющие - вращательную и колебательную и определится выражением:

где R - радиус колеса,
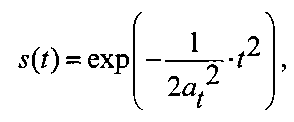
В этом случае выходной сигнал периферийного вихретокового датчика при наличии колебаний определится как:
При отсутствии колебаний, соответственно:
где

Форма выходных сигналов периферийного вихретокового датчика в обоих случаях показана на фиг. 2.
Для определения неизвестных параметров колебания лопатки: амплитуды А, частоты

где в качестве исходных данных для аппроксимации задаются отсчеты сигнала периферийного вихретокового датчика от колеблющейся лопатки в моменты времени t1, t2 и t3. Для определения неизвестных параметров колебаний лопатки используются, например, методы нелинейной аппроксимации.
Устройство для определения параметров колебаний лопаток вращающегося колеса турбомашины (фиг. 1) содержит неподвижный бесконтактный периферийный датчик 1, например вихретоковый, установленный в корпусе 2 турбомашины в плоскости вращения колеса напротив траектории движения торцов лопаток 3, фильтр 4 низких частот, вход которого подключен к выходу периферийного датчика 1, аналого-цифровой преобразователь 5, информационный вход которого соединен с выходом фильтра 4 низких частот, формирователь 6 прямоугольных импульсов периферийного датчика 1, вход которого также подключен к выходу фильтра 4 низких частот, выход формирователя 6 подключен к синхронизирующему входу АЦП 5, возбудитель 7 оборотного датчика (оборотная метка), установленный на роторе турбомашины, неподвижный бесконтактный оборотный датчик 8, например вихретоковый, установленный на неподвижной конструктивной части турбомашины напротив траектории движения оборотной метки 7, формирователь 9 импульсов оборотного датчика, вход которого подключен к выходу оборотного датчика 8, блок 10 преобразования временных интервалов в код, синхронизирующий вход которого подключен к выходу формирователя 9, ЭВМ 11, например, PC типа IBM, первая часть входных разрядов цифрового интерфейса которой соединена с цифровыми выходами АЦП 5, а вторая часть входных разрядов цифрового интерфейса ЭВМ 11 соединена с выходными цифровыми разрядами блока 10 преобразования временных интервалов, третья и четвертая часть входных разрядов цифрового интерфейса ЭВМ 11 соединена, соответственно, с выходами формирователей 6 и 9, ЭВМ является выходным блоком устройства, который позволяет получать, запоминать и обрабатывать входную информацию, реализуя алгоритм нелинейной аппроксимации при решении системы нелинейных уравнений для определения неизвестных параметров колебаний, хранить и выдавать конечную информацию в необходимом для пользователя виде.
Устройство (фиг. 1), реализующее предлагаемый способ определения параметров колебаний лопаток вращающегося колеса турбомашины, работает следующим образом.
Неподвижный бесконтактный периферийный датчик 1, например вихретоковый, установленный в корпусе 2 турбомашины в плоскости вращения колеса напротив траектории движения торцов 3 лопаток, генерирует электрические колоколообразные импульсы взаимодействия с торцами лопаток с амплитудой
Реферат
Изобретение предназначено для бесконтактного определения амплитуды, частоты и фазы колебаний лопаток турбоагрегатов и может быть использовано для определения дефектов лопаток турбомашин в процессе их эксплуатации. Способ заключается в установлении на неподвижном узле турбомашины оборотного импульсного датчика и возбудителя - оборотной отметки, а также в корпусе турбомашины, в плоскости вращения контролируемого лопаточного колеса над траекторией движения торцов лопаток устанавливают неподвижный бесконтактный периферийный датчик. Датчик регистрирует информационные сигналы взаимодействия периферийного первичного преобразователя с торцом лопаток. На основании данных справочной литературы определяют аналитическое выражение, решают систему нелинейных уравнений. Технический результат заключается в увеличении точности и достоверности определения амплитуды, частоты и фазы колебаний всех лопаток вращающегося колеса турбомашины. 2 н.п. ф-лы, 2 ил.
Комментарии