Узел газотурбинного двигателя для измерения вибраций, действующих на лопатку во время ее вращения - RU2661990C2
Код документа: RU2661990C2
Чертежи



Описание
Область техники, к которой относится изобретение
Изобретение относится к области вращающихся лопаток.
В частности, изобретение относится к области характеризации вибраций, действию которых подвергаются такие лопатки, когда они находятся во вращении.
Уровень техники
Лопаточное колесо представляет собой ступицу, содержащую множество лопаток или лопастей. Во время разработки и сертификации газотурбинных двигателей необходимо проверять, имеет ли такое подвижное лопаточное колесо, вращающееся в корпусе, собственные частоты, которые могут возбуждаться в области работы движущихся частей такого газотурбинного двигателя.
Для собственных частот, обнаруживаемых в области работы, необходимо также дать количественную характеристику уровня соответствующих вибрационных напряжений.
Первой известной технологией для характеристики вибраций, действующих на лопатки во время работы, является использование тензометров, наклеиваемых на лопаточное колесо. На основании измерения микродеформаций на поверхности материала можно характеризовать лопатки в частотной области и вычислить напряжения внутри материала.
Однако эта первая технология имеет ряд недостатков.
Во-первых, тензометры, наклеиваемые на лопатки, подвергаются действию колоссальных центробежных усилий (порядка 100000g), потенциально связанных со сверхвысокими температурами, в частности, когда исследование производят на турбине высокого давления. Следовательно, эти тензометры имеют ограниченный срок службы.
Во-вторых, установка тензометра требует высокой квалификации, тщательности и занимает много времени (в частности, для обжига цемента, в который заделывают тензометры).
В-третьих, необходимо осуществлять передачу сигнала, поступающего от тензометров, установленных на подвижном лопаточном колесе, в неподвижную систему координат. Для этого соединительные провода должны проходить по валу двигателя до вращающегося коллектора. Не считая длины проводов, а также вращающегося соединения с коллектором, которые являются причиной шумов при измерениях, предварительные исследования для интегрирования вращающегося коллектора в двигатель занимают много времени и являются дорогостоящими.
Для преодоления этих недостатков была предложена вторая технология, основанная на использовании датчиков, расположенных напротив вращающихся лопаток и, следовательно, в неподвижной системе координат.
В рамках этой второй технологии применяют измерение промежутков времени прохождения перед оптическими датчиками для двух вибрационных состояний лопатки (в присутствии или в отсутствие вибраций). Такой способ измерения, называемый "tip timing" на английском языке, позволяет пересчитывать амплитуды чередующихся перемещений в вершине лопатки. Знание форм колебаний позволяет связать уровни перемещения в вершине лопатки с уровнями напряжений в лопатке.
Этот способ "tip timing", описанный в документах US 3208269 и US 4757717 требует, в частности, использования проводников зигзагообразной формы, расположенных вокруг оси вращения лопатки.
Однако эта вторая технология не позволяет получать частотную информацию по измеряемым вибрациям. Действительно, учитывая зигзагообразную форму проводников, эта вторая технология позволяет идентифицировать только общие уровни перемещения в вершине лопатки, но не позволяет узнать, какая мода лопатки оказывается возбужденной. Такое ограничение создает большие затруднения при вибрационном контроле.
Кроме того, иногда метод "tip timing" приводит к неоднозначным выводам, что не позволяет идентифицировать порядок возбуждения, влияющий на регистрируемые уровни перемещений.
Раскрытие изобретения
Задачей изобретения является обеспечение определения характеристик вибраций, действующих на лопатку при ее приведении во вращение, в частности, измерение данных, характеризующих вибрационные частоты лопатки.
В связи с этим первым объектом изобретения является узел для газотурбинного двигателя, содержащий корпус и подвижное лопаточное колесо, выполненное с возможностью вращения в корпусе, при этом лопаточное колесо содержит по меньшей мере одну лопатку, вершина которой находится напротив корпуса, причем, согласно изобретению, вершина содержит магнит, а корпус содержит электрический проводник, выполненный с возможностью генерирования между своими клеммами электрического напряжения, индуцируемого магнитом, находящейся напротив вершины, и характеризующего вибрации, действующие на вершину лопатки во время приведения во вращение лопаточного колеса.
Вторым объектом изобретения является способ определения характеристик вибраций лопатки узла газотурбинного двигателя, являющегося первым объектом изобретения, при этом способ содержит следующие этапы, на которых:
- приводят во вращение лопаточное колесо в корпусе,
- на клеммах электрического проводника измеряют электрическое напряжение, индуцируемое магнитом, содержащимся в вершине лопатки напротив корпуса,
- определяют данные, характеризующие вибрации, действующие на вершину лопатки, на основании измеренного электрического напряжения.
Магнит генерирует магнитное поле. Во время приведения во вращение лопаточного колеса, подвижного во вращении относительно корпуса, относительное движение магнитного поля по отношению к электрическому проводнику (движение, связанное с вращением лопаточного колеса и с его вибрациями) индуцирует электрический ток в электрическом проводнике, содержащемся в корпусе напротив вершины лопатки, которая содержит магнит. Этот электрический ток проходит в клеммы электрического проводника. Напряжение на этих клеммах позволяет характеризовать вибрации, действующие на лопатку, в частности, идентифицировать частоты собственных мод лопатки.
Узел для газотурбинного двигателя, являющийся первым объектом, и способ, являющийся вторым объектом, позволяют отказаться от прямых измерений напряжений на лопаточном колесе и избежать использования сложной системы инструментов в подвижной системе координат, связанной с лопаткой, чтобы характеризовать вибрации лопатки, снабженной магнитом. Система инструментов является минимальной в этой подвижной системе координат (в лопатку встроен только магнит) и минимальной также в неподвижной системе координат, связанной с корпусом (прокладка электрического проводника в корпусе) для получения данных, эквивалентных данным, получаемым при помощи известных устройств, описанных во вступительной части.
Напряжение, измеряемое на клеммах электрического проводника, характеризует вибрации магнита, появляющиеся вне плоскости прохождения, но это напряжение не зависит от относительного движения лопатки вокруг своей оси вращения (так, в идеальной ситуации, в которой лопатка не подвергается никаким вибрациям, напряжение на клеммах электрического проводника будет нулевым, когда магнит находится напротив участка центральной части).
Кроме того, тот факт, что центральная часть проводимости находится по всей своей длине в плоскости прохождения магнита, позволяет получать постоянный сигнал напряжения в течение времени, используемого для анализа в частотной области. Зигзагообразные проводники, используемые в известных способах, наоборот, позволяют получать только частичные и сегментированные сигналы, не удовлетворяющие спектральному анализу.
Заявленный узел можно дополнить следующими признаками, взятыми отдельно или в любой из их технически возможных комбинаций.
Центральная часть, расположенная вокруг оси вращения лопаточного колеса, может содержать два конца, находящиеся в двух разных угловых положениях вокруг оси вращения лопаточного колеса. Такой вариант выполнения позволяет получать данные вибрации для разных угловых положений лопатки вокруг оси вращения лопаточного колеса; кроме того, разные угловые положения двух концов центральной части создают прерывистость, позволяющую получать «пики витка», которые могут служить временной точкой отсчета во время непрерывного измерения, производимого на клеммах электрического проводника.
Кроме того, центральная часть может быть расположена менее чем на 360 градусов вокруг оси вращения, в частности, чтобы упростить монтаж электрического проводника на или внутри корпуса. В таком варианте выполнения, в котором длина центральной части укорочена, вокруг оси вращения лопаточного колеса между концами его центральной части оставлено пространство, не охватываемое электрическим проводником. Это пространство называют также «отверстием витка».
Центральная часть и обе ветви могут быть компланарными, при этом каждая ветвь проходит от соответствующего конца в радиальном направлении наружу относительно оси вращения лопаточного колеса.
Кроме того, магнит может быть выполнен с возможностью создания магнитного поля, ориентированного радиально относительно оси вращения лопаточного колеса.
Как правило, напряжения на клеммах электрического проводника являются низкими. Поэтому с клеммами электрического проводника можно соединить усилитель напряжения, при этом измерения осуществляют на выходе этого усилителя.
Электрический проводник может быть по меньшей мере частично погружен в истираемое покрытие на внутренней поверхности корпуса напротив лопаточного колеса, при этом истираемое покрытие выполнено из парамагнитного или диамагнитного материала. Таким образом, магнитный поток магнита изменяется лишь в незначительной степени, и при выполняемых измерениях можно использовать весь создаваемый магнитом магнитный поток.
Узел может дополнительно содержать устройство измерения для применения преобразования Фурье к сигналу электрического напряжения, чтобы получить спектр, характеризующий вибрационные частоты лопатки.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве иллюстративного и неограничивающего примера, со ссылками на прилагаемые чертежи.
На фиг. 1 показан узел для газотурбинного двигателя согласно варианту осуществления изобретения, первый вид в частичном разрезе;
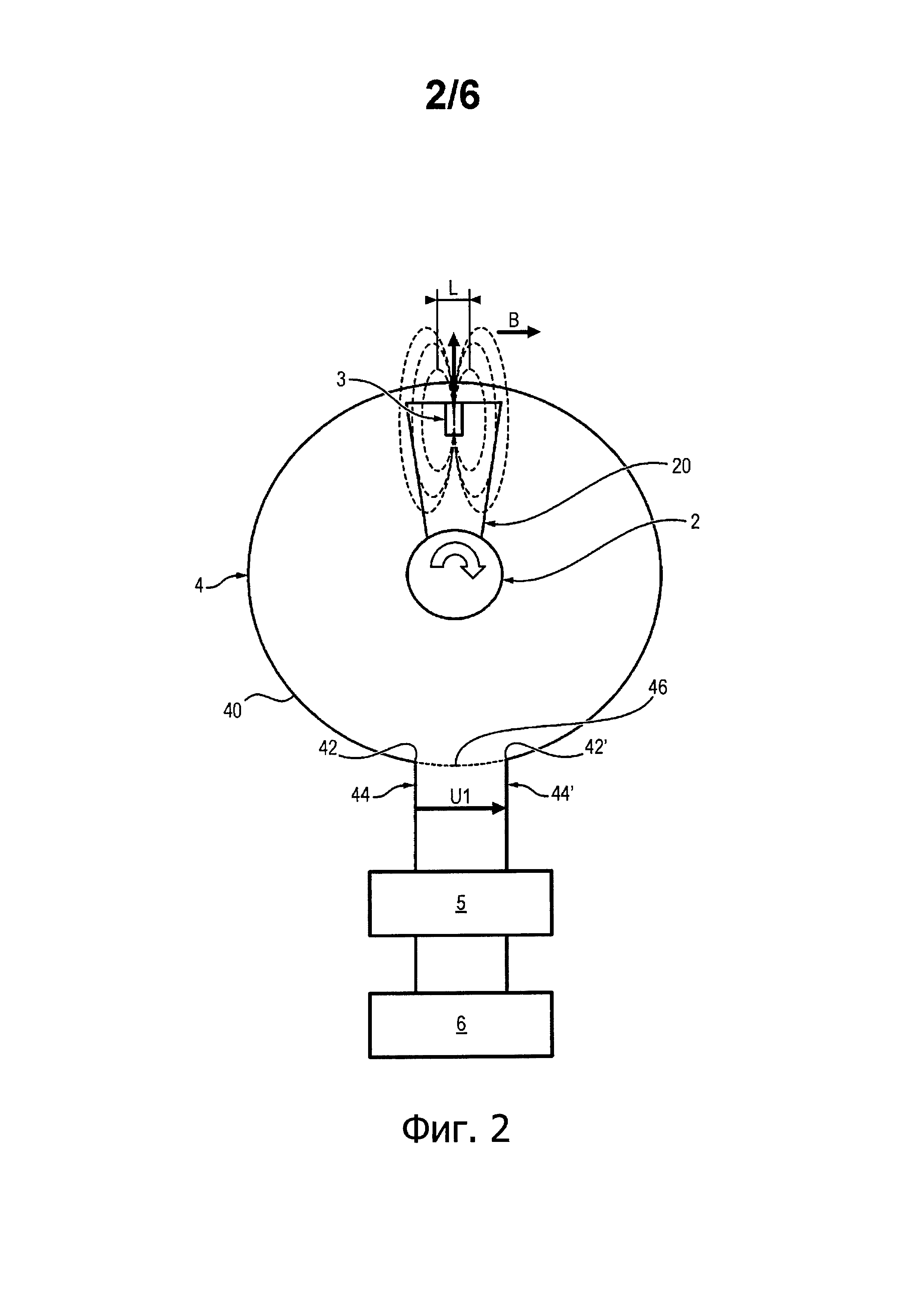
на фиг. 2 показан узел, изображенный на фиг. 1, второй вид в частичном разрезе;
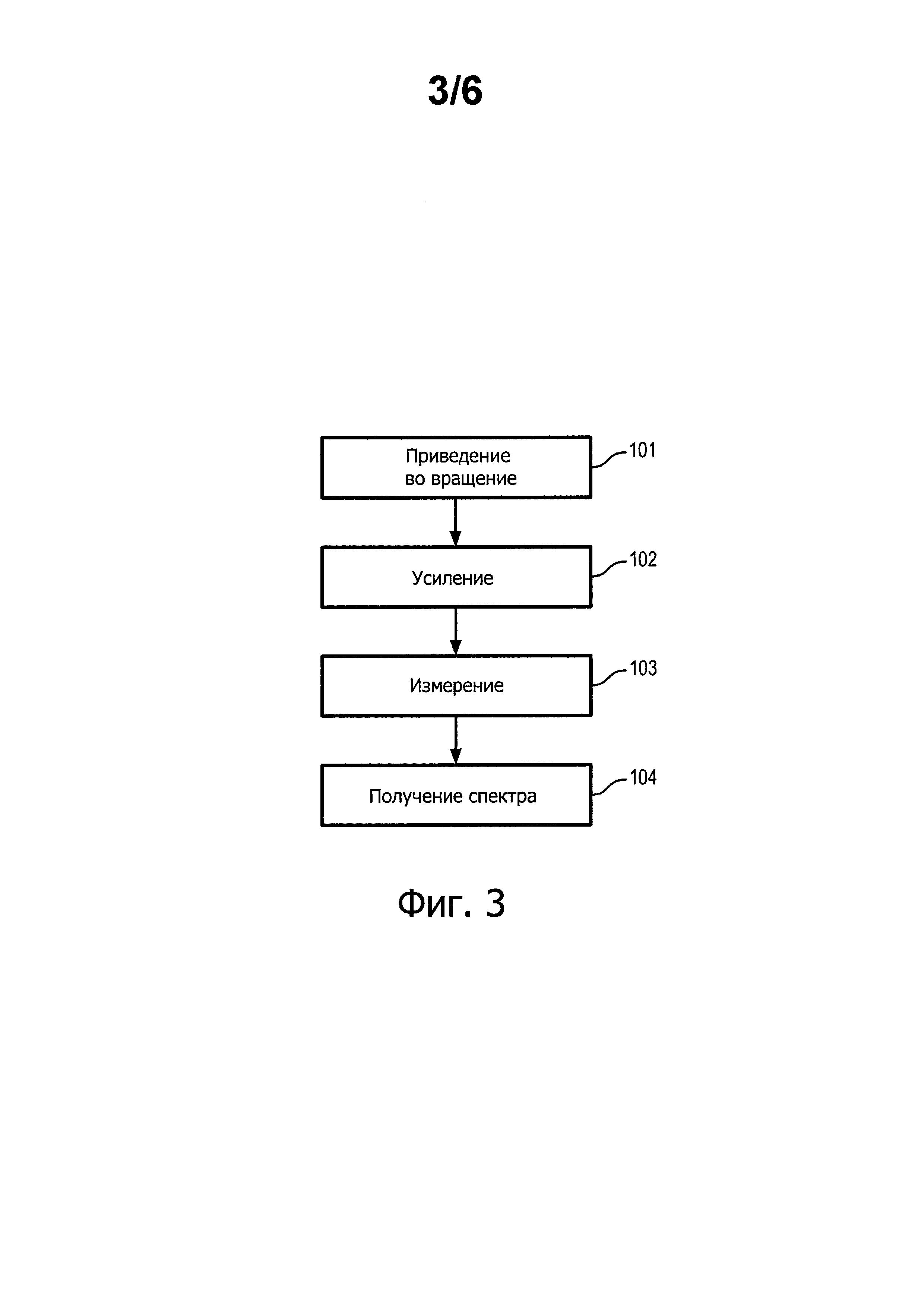
на фиг. 3 показана блок-схема этапов способа характеризации вибраций, действующих на лопатку, согласно варианту осуществления изобретения;
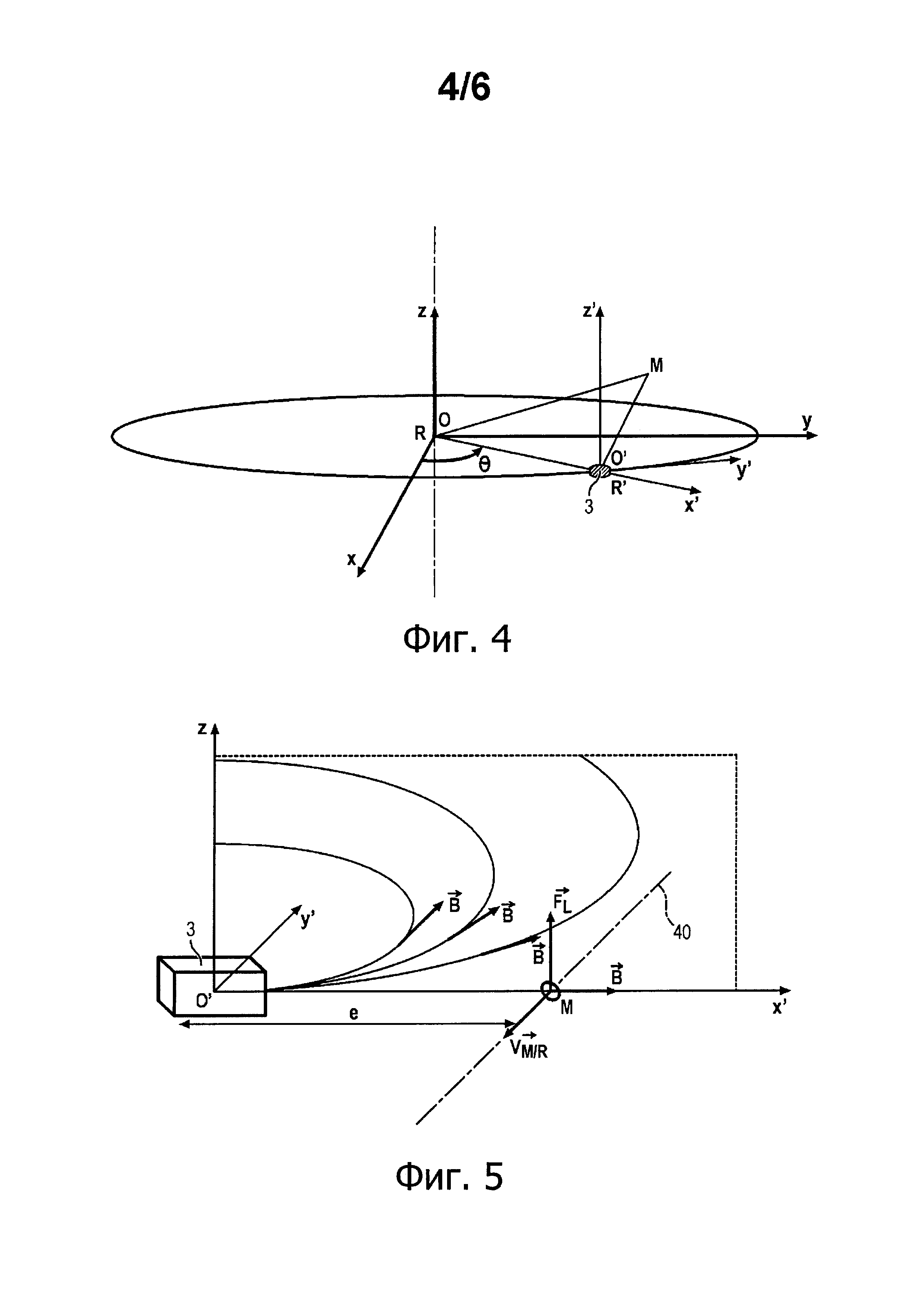
на фиг. 4 представлены системы координат, связанные с различными элементами узла Е, показанного на фиг. 1 и 2;
на фиг. 5 представлена схема электромагнитных взаимодействий между элементами узла газотурбинного двигателя, показанного на фиг. 1 и 2;
на фиг. 6а-6с представлен временной сигнал напряжения, полученный в ходе осуществления способа, показанного на фиг. 3;
на фиг. 7 изображен спектр, соответствующий сигналу, показанному на фиг. 6с.
На всех фигурах подобные элементы имеют одинаковые обозначения.
Осуществление изобретения
Показанный на фиг. 1 узел Е газотурбинного двигателя содержит корпус 1 и подвижное лопаточное колесо 2, вращающееся относительно корпуса 1. В данном случае лопаточное колесо 1 образовано совокупностью лопаток (или лопастей), распределенных по окружности колеса.
Корпус 1 содержит внутреннюю поверхность 10, ограничивающую пространство, в котором расположено лопаточное колесо 2. Эта внутренняя поверхность 10 является, например, цилиндрической.
Лопаточное колесо 2 установлено на валу 24 двигателя, расположенном вдоль оси вращения (перпендикулярно к плоскости фиг. 1). Лопаточное колесо 2 содержит диск 22 вокруг вала 24 и множество лопаток. Каждая лопатка установлена по существу радиально от диска 22 и заканчивается соответствующей вершиной. Таким образом, вершина каждой лопатки находится напротив участка поверхности корпуса 1, независимо от углового положения, занимаемого лопаточным колесом 2, подвижным относительно корпуса 1.
По меньшей мере одна из лопаток лопаточного колеса, обозначенная позицией 20, содержит на своей вершине 21 магнит 3. Магнит может, например, достигать максимального радиуса вершины лопатки относительно оси вращения.
Магнит 3 неподвижно соединен с лопаткой 20, которая, в свою очередь, неподвижно соединена с диском 22; в дальнейшем будет считаться, что движение магнита 3 отображает движение вершины 21 лопатки 20.
Топология магнитного поля, создаваемого магнитом 3, аналогична топологии соленоида с множеством витков: она образует тор, окружающий магнит 3, и направлена от его северного полюса к его южному полюсу. Магнит 3 выполнен с возможностью создания магнитного поля с радиальной ориентацией относительно оси вращения лопаточного колеса 2.
Показанный на фиг. 2 корпус 1 содержит электрический проводник 4.
Электрический проводник 4 содержит так называемую «центральную» часть, образующую виток или участок витка вокруг оси вращения лопаточного колеса 2. Эта центральная часть 40 закреплена, например, на внутренней поверхности 10 корпуса 1 напротив лопаточного колеса 2.
Центральная часть 40 содержит два конца 42, 42', находящиеся в разных угловых положениях вокруг оси вращения лопаточного колеса 2.
Электрический проводник 4 содержит также две ветви 44, 44', каждая из которых продолжает соответствующий конец центральной части 40.
Предпочтительно центральная часть 40 расположена не на всей окружности корпуса 1 вокруг оси вращения лопаточного колеса 2, а образует дугу окружности с угловым сектором менее 360 градусов вокруг оси вращения лопаточного колеса. При этом оба конца 42, 42' ограничивают участок окружности корпуса 1, не перекрытый центральной частью 40. Этот не перекрытый участок в дальнейшем будет называться «отверстием витка» и обозначен позицией 46.
В не показанном на фигурах варианте центральная часть расположена более чем на полный оборот вокруг оси вращения лопаточного колеса.
Ветви 44, 44' расположены по существу в радиальном направлении относительно оси вращения лопаточного колеса 2 в корпусе 1. Каждая ветвь 44 (соответственно 44') образует, например, с центральной частью 40 на конце 42 (соответственно 42'), который она продолжает, угол, составляющий от 80 градусов до 100 градусов, предпочтительно 90 градусов.
Центральная часть 40 расположена по всей своей длине между концами 42, 42' в плоскости, которая соответствует плоскости прохождения магнита 3 во время оборота лопатки 20 вокруг оси вращения лопаточного колеса 2.
Ветви 44, 44', продолжающие эту центральную часть 40, тоже могут быть расположены в этой же плоскости прохождения.
Когда лопаточное колесо 2 занимает угловое положение, при котором магнит 3 находится напротив точки центральной части 40, относительное вибрационное движение магнитного поля, создаваемого магнитом 3, относительно центральной части 40 индуцирует электрический ток в участке центральной части 40 длиной L вблизи этой точки, который проходит до клемм, образованных ветвями 44, 44'. При этом между клеммами электрического проводника генерируется напряжение U1.
В варианте осуществления, показанном на фиг. 2, центральная часть 40 первого электрического проводника 4 образует участок окружности с центром на точке оси вращения. Таким образом, промежуток между магнитом 3 и любой точкой центральной части 40 представляет собой постоянное расстояние. В варианте центральная часть может иметь другие формы, отличные от круглой формы или формы участка окружности.
Клеммы электрического проводника 4 соединены со входом усилителя 5 напряжения.
Выход усилителя 5 напряжения соединен с устройством 6 измерения напряжения, содержащим средства для осуществления спектрального анализа временного сигнала напряжения, усиленного усилителем 5.
Общий принцип способа характеризации вибраций лопатки
На фиг. 3 представлены этапы способа характеризации вибраций, действующих на лопатку 20, содержащую магнит 3.
На предварительном этапе 101 лопаточное колесо 2 приводят во вращение вокруг его оси вращения. Это вращение может привести к вибрациям лопатки 20.
Период оборота лопатки 20 вокруг оси вращения лопаточного колеса 2 содержит две разные фазы, каждая из которых соответствует соответствующему диапазону угловых положений лопаточного колеса 2, подвижного относительно корпуса 1: фазу, во время которой магнит 3 находится напротив участка центральной части 40, и фазу, во время которой магнит 3 находится напротив отверстия 46 витка между его двумя концами 42, 42'.
Когда магнит 3 находится напротив участка центральной части 40, относительное вибрационное движение магнитного поля В, создаваемого магнитом 3, относительно центральной части 40 индуцирует электрический ток в центральной части 40, который проходит в клеммы, образованные ветвями 44, 44'. При этом между двумя клеммами электрического проводника 4 создается напряжение U1.
Это напряжение U1, как правило, являющееся очень низким, усиливается усилителем 5 во время этапа 102.
На этапе 103 устройство 6 измерения получает через напряжение, усиленное усилителем 5, временной сигнал напряжения продолжительностью, превышающей период оборота лопатки 20 вокруг оси вращения.
На этапе 104 устройство вычисляет преобразование Фурье полученного временного сигнала. Результат этого преобразования представляет собой спектр, отображающий вибрационные частоты лопатки 20, на которой установлен магнит 3.
Поскольку центральная часть 40 проводника проходит по существу непрерывно в плоскости прохождения магнита, временной сигнал, полученный во время прохождения магнита вдоль центральной части 40, тоже является непрерывным. Такой сигнал содержит частотные данные, которые можно использовать после вычисления преобразования Фурье.
С другой стороны, проводник, имеющий форму в виде зигзага в соответствии со способом "tip timing", не постоянно находится в плоскости прохождения магнита. Сигнал, получаемый при помощи такого зигзагообразного проводника, является дискретным, поэтому его дискретизация является недостаточной для обеспечения преобразования Фурье с целью использовать данные спектра, получаемого в результате этого преобразования Фурье.
Далее следует более подробное описание электромагнитных действий магнита 3 во время этих двух фаз.
Электромагнитное действие магнита, когда он находится напротив центральной части
Как показано на фиг. 4, предварительно определяют неподвижную систему R координат, связанную с корпусом 1, и подвижную систему R' координат, связанную с магнитом 3.
Неподвижная система R координат образована центром О, осью вращения лопаточного, колеса 2, обозначенной z, и осями х и у, образующими плоскость, перпендикулярную к оси двигателя и содержащую движение магнита 3.
Подвижная система R' координат образована центром О', характеризующим положение магнита 3, осью z', параллельной оси z, осью х', образованной прямой ОО', и осью, при которой система R' координат является прямоугольным трехгранником. Подвижная система R' координат образует угол 6 относительно неподвижной системы R координат.
Как правило, закономерности изменения с R на R' системы координат точки М в системе R' координат обуславливают следующее отношение:
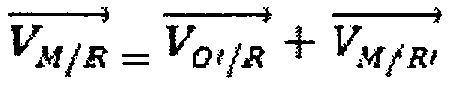
Как показано на фиг. 5, в качестве точки М рассматривают точку центральной части 40. В этом случае можно записать:
Это отношение показывает, что, эквивалентно, магнит 3 в вершине лопатки 20 перемещается напротив неподвижной центральной части 40 в неподвижной системе координат или что центральная часть 40 перемещается напротив неподвижного магнита 3 в подвижной системе координат.
Если рассматривать электрон, принадлежащий к центральной части 40, неподвижной в неподвижной системе R координат, его видимая скорость во вращающейся системе R' координат будет представлять собой вектор

Если считать, что эта точка М находится точно на оси О'х' магнита 3, то результирующая FL силы Лоренца, действующей на электрон, будет ориентирована, как показано на фиг. 5.
Можно рассмотреть устройство в плоскости O'x'z', и составляющие поля В можно рассматривать только на составляющих х' и z'. Скорость движения электрона во вращающейся системе координат соответствует скорости, которую имела бы неподвижная точка во вращающейся системе координат на расстоянии r+е, учитывая радиус r лопатки и промежуток е между магнитом 3 и абсциссой во вращающейся системе координат точки М. В этом случае электродвижущее поле можно записать следующим образом:

Когда магнит 3 подвергается действию вибраций лопатки 20, электродвижущее поле, генерируемое вибрационным движением лопатки 20, становится:

где:

Ток, индуцируемый в центральной части 40, можно измерить, когда электродвижущее поле ориентировано вдоль составляющей у, то есть по оси проводника. Таким образом, измеряемой составляющей является:

Кроме того, если предположить, что магнит 3 содержится в плоскости центральной части 40, эту составляющую можно переписать как:

Следовательно, в случае, когда магнит 3 находится в плоскости центральной части 40, только вибрационное поведение вдоль оси z (оси вращения) приведет к появлению измеряемых индуцированных токов. В отсутствие вибрационной деятельности не будет и измеряемого сигнала.
Моментальное напряжение U1, измеряемое на клеммах электрического проводника 4, когда сегмент АВ находится в поле влияния магнита 3, выражается следующим образом:

где lAB обозначает длину сегмента, подвергающегося влиянию магнита 3, Bx' является радиальной составляющей магнитного поля, генерируемого магнитом 3, и Vvibz является составляющей вибрационной скорости магнита 3 по оси х.
Электромагнитное действие магнита, когда он находится напротив отверстия витка
Когда магнит 3 находится напротив отверстия 46 витка, электрический проводник 4 выходит из-под влияния магнитного поля В магнита, то есть явления, которое естественным образом создает индуцируемые токи.
Поскольку это отверстие 46 витка выполнено вдоль оси х', то только составляющая х' электродвижущего поля генерирует напряжение в ветвях 44, 44' выхода центральной части 40.
Электродвижущее поле, генерируемое в ветвях 44, 44' выхода центральной части 40, пропорционально, с одной стороны, скорости вращения ротора и, с другой стороны, составляющей магнитного поля.
Прохождение исследуемой лопатки 20 перед этим отверстием 46 витка приводит к появлению так называемого «пика витка» во временном сигнале напряжения, измеряемом устройством 6 измерения и показанном на фиг. 6. Таким образом, отверстие 46 витка обеспечивает образование таких пиков витка.
Пики витка представляют собой полезные данные во временном сигнале напряжения, измеряемом устройство 6 измерения. Действительно, они могут служить временной точкой отсчета для измерения скорости вращения лопаточного колеса 2 вокруг его оси. Кроме того, они характеризуют чувствительность осуществляемых измерений.
Вместе с тем, эти пики витка создают гармоники, которые могут помешать интерпретации временного сигнала измерения или соответствующего спектра, формируемого устройством 6 измерения.
Поэтому представляется необходимым минимизировать присутствие этих пиков витка во временном сигнале напряжения.
Протяженность во времени пиков витка можно минимизировать, уменьшив размер отверстия 46 витка: например, можно предусмотреть концы 42, 42', удаленные от дуги, образованной угловым сектором вокруг оси вращения лопаточного колеса, менее чем на 20 градусов и даже менее чем на 10 градусов. За счет минимизации отверстия витка можно максимально увеличить время, во время которого центральная часть 40 будет чувствительной к вибрациям лопаточного колеса 2.
Кроме того, пики витка можно минимизировать, ориентируя каждую ветвь электрического проводника 4 под углом, составляющим от 80 до 100 градусов, предпочтительно 90 градусов относительно конца центральной части 40, который продолжает эта ветвь. Кроме того, такая ориентация угла облегчает интегрирование ветвей в корпус 1.
Временной анализ
Временной сигнал напряжения s(t), регистрируемый на клеммах центральной части 40, является прямым отображением составляющей вибрационной скорости лопатки 20, параллельной оси вращения z' лопаточного колеса 2.
В идеальной ситуации, в которой на лопатку 20 не действует никакая вибрация, полученный сигнал s(t) может выглядеть как повторяющийся рисунок m(t), зависящий от режима двигателя. Таким образом, этот сигнал может выглядеть как конволюция этого рисунка m(t) с гребенкой Дирака δTr(t), периодом Tr которой является период оборота магнита 3 вокруг оси вращения лопаточного колеса 2.
s(t)=m(t)⋅δTr(t)
На фиг. 6a показан сигнал s(t), соответствующий такой идеальной ситуации и содержащий два пика витков продолжительностью dT.
В реальной ситуации, в ходе которой магниту 3 передается вибрационное движение вершины 21 лопатки 20, временной сигнал напряжения становится:
s(t)=m(t)⋅δTr(t)+sv(t),
где sv(t) является вибрационной составляющей. Пример такого сигнала представлен на фиг. 6b. Если во время вращения лопатка подвергается вибрационному движению, содержащему осевую составляющую на уровне магнита 3, вибрационное движение индуцирует напряжение, пропорциональное (при небольших перемещениях) его осевой скорости.
Кроме того, на фиг. 6с показан временной сигнал напряжения в течение времени, превышающего период оборота лопатки; в этом сигнале присутствует множество пиков витка.
Спектральный анализ
На фиг. 7 показан спектр S(ƒ), соответствующий сигналу s(t), полученный во время этапа 104 и который выражается в виде:
S(ƒ)=М(ƒ)δFr(ƒ)+Sv(ƒ)
где M(f) является спектром рисунка m(t), Sv(f) является спектром вибрационного сигнала sv(t), и Fr является частотой вращения лопаточного колеса 2, соответствующей периоду Tr.
Таким образом, отмечается, что частотное отображение сигнала, измеряемого на клеммах электрического проводника 4, будет состоять из спектра вибрационной составляющей аддитивного члена, соответствующего совокупности рисунков. Этот член будет представлять собой гребенку Дирака на частоте Fr, модулируемую спектром рисунка m(t).
Анализ сигнатуры турбины обычно осуществляют в зависимости от режимов различных подвижных генерирующих элементов (NG) или свободных турбин. Действительно, эти подвижные элементы образуют основные источники возбуждений в газотурбинном двигателе, поэтому изменение спектрального содержания показывают в зависимости от режима возбуждения. Определенному режиму подвижного элемента соответствует частота возбуждения fexc, при которой fexc = режим/60.
Следовательно, изменение спектрального содержания сигнала S(ƒ) можно выразить в зависимости от режима лопаточного колеса 2. Для этого повторяют этап 103 измерения, при этом каждое измерение начинается, когда соблюдено заранее определенное условие запуска. Различные считываемые временные сигналы соответствуют, каждый, соответствующему окну наблюдения одинаковой длительности или временной ширины.
Считывание каждого временного окна осуществляют, например, в зависимости от условия изменения режима. Каждый раз, когда условие соблюдено, осуществляют считывание окна наблюдения и вычисление соответствующего спектра (этап 104).
Как правило, считывание запускают каждый раз, когда режим повышается на шаг заранее определенной скорости, например, 60 об/мин, или периодически.
Временные окна могут примыкать или не примыкать друг к другу во времени. На практике предпочтительно окна наблюдения примыкают друг к другу таким образом, чтобы можно было с уверенностью отслеживать изменение спектра во времени. Ширину каждого окна задают одновременно в зависимости от требуемого частотного разрешения и от степени «обновления» спектра.
Каждый спектр можно определить на основании соответствующего временного сигнала, как было указано выше, или в варианте на основании средней величины из N временных сигналов, считывание которых запускают последовательно.
В любом случае повторение этапов 103 и 104 приводит к получению множества спектров, которые можно комбинировать таким образом, чтобы сформировать различные типы необходимых диаграмм, известных специалисту в данной области, таких как диаграмма время-частота или диаграмма Кэмпбелла.
Диаграмма время-частота позволяет наблюдать изменение спектра, связанного с вибрациями вершины 21, в зависимости от времени (при этом применяемым преобразованием Фурье является «краткосрочное» преобразование Фурье или "Short time Fourier transform" на английском языке). В этом случае предпочтение отдается частично перекрывающим друг друга окнам наблюдения, так как они позволяют улучшить временное и частотное разрешение такой диаграммы время-частота.
Диаграмма Кэмпбелла позволяет наблюдать изменение спектра, связанного с вибрациями вершины 21, в зависимости от режима двигателя.
Следствия при анализе по частоте сигнала полученного таким образом спектра являются следствиями нескольких порядков:
- Совокупность порядков двигателей четко представлена на спектре в виде гребенки Дирака, частота которой синхронна с режимом.
- Амплитуда различных порядков двигателя будет модулирована по частоте спектром рисунка витка, что приводит к соответствующему уменьшению амплитуд пиков вблизи границ полосы анализа.
- Члены, соответствующие порядкам двигателей и полезному сигналу, будут аддитивными членами, что позволяет лучше выявлять возможные феномены резонанса лопаток, но, с другой стороны, каждый идентифицированный резонанс между модой лопатки 2 и порядком двигателя будет суммой этих двух составляющих (и, следовательно, не будет отражать вибрационную амплитуду лопатки).
Полученные спектры можно подвергать другим обработкам в частотной области. Для осуществления таких обработок специалист может обратиться к работе M. Kay под названием "Modern Spectral Estimation".
Материалы
Электрический проводник 4 можно расположить непосредственно на внутренней поверхности 10 корпуса 1 напротив лопаточного колеса 2.
В варианте проводник можно расположить внутри корпуса 1, но при этом необходимо убедиться, что любой участок материала корпуса 1, находящийся между электрическим проводником 4 и магнитом 3, обеспечивает хорошую передачу магнитного поля, генерируемого магнитом 3, до участка электрического проводника 4. При этом можно выполнить указанный участок материала из парамагнитного и диамагнитного материала, поскольку эти материалы имеют значения магнитной проницаемости, близкие к 1. Таким образом, магнитный поток магнита 3 будет изменяться лишь в незначительной степени, и при измерениях можно использовать весь магнитный поток, генерируемый магнитом 3.
Например, электрический проводник 4 может быть полностью или частично погружен в истираемое покрытие, выполненное на внутренней поверхности 10 корпуса 1 напротив лопаточного колеса 2, при этом истираемое покрытие выполняют из такого парамагнитного или диамагнитного материала.
Кроме того, магнит 3 может состоять из алюминия-никеля-кобальта (AlNiCo) с точкой Кюри от 800°С до 850°С (точка Кюри является температурой, при которой материал теряет свою спонтанную намагниченность).
Усилитель 5 может быть усилителем постоянного тока, который предпочтительно позволяет применять коэффициенты усиления до 3000. Таким образом, можно усиливать напряжение на клеммах электрического проводника 4 для получения измеряемого напряжения порядка милливольта.
Описанный узел Е газотурбинного двигателя можно применять для любого типа подвижного лопаточного колеса, вращающегося в неподвижной конструкции, подобной корпусу: осевые колеса, центробежные колеса, турбины высокого давления, свободные турбины и т.д.
Газотурбинный двигатель, содержащий такой узел Е, можно также устанавливать на транспортном средстве любого типа, в частности на летательном аппарате.
Реферат
Группа изобретений относится к области вращающихся лопаток, в частности к области характеризации вибраций, действию которых подвергаются такие лопатки, когда они находятся во вращении. Узел для газотурбинного двигателя содержит корпус и подвижное лопаточное колесо, вращающееся в корпусе и содержащее по меньшей мере одну лопатку, вершина которой находится напротив корпуса. Вершина содержит магнит, а корпус содержит электрический проводник, выполненный с возможностью генерирования между своими клеммами сигнала электрического напряжения, индуцируемого магнитом, находящимся напротив вершины, и характеризующего вибрации, действующие на вершину лопатки во время приведения во вращение лопаточного колеса. Технический результат – повышение точности измерения вибрации лопатки газотурбинного двигателя. 2 н. 23 з.п. ф-лы, 7 ил.
Комментарии