Система управления угловым положением лопаток и способ оптимизации упомянутого углового положения - RU2531488C2
Код документа: RU2531488C2
Чертежи




Описание
Настоящее изобретение относится к области газотурбинных двигателей, содержащих по меньшей мере два ротора и одну или несколько ступеней статора, лопатки которых являются лопатками с переменным углом установки.
Задачей изобретения является оптимизация углового положения упомянутых лопаток статора с целью снижения расхода топлива, когда газотурбинный двигатель работает в устоявшемся режиме. Под «устоявшимся режимом» следует понимать режим двигателя, в котором тяга, создаваемая двигателем, является по существу постоянной в течение времени.
Например, каждый ротор двухроторного газотурбинного двигателя содержит по меньшей мере один компрессор и одну турбину, установленную на выходе упомянутого компрессора. В настоящей заявке условно термины «вход» и «выход» будут использованы по отношению к направлению прохождения воздуха в газотурбинном двигателе. В классическом варианте компрессор содержит несколько ступеней ротора для ускорения и сжатия воздушного потока, проходящего от входа к выходу в двигателе. Для спрямления воздушного потока после ускорения непосредственно на выходе каждой ступени ротора располагают одну ступень статора.
Ступень статора представляет собой неподвижное колесо, расположенное в осевом направлении, с радиальными лопатками статора, установленными на периферии колеса статора. Чтобы оптимизировать спрямление воздушного потока ступенями статора на выходе ступеней ротора, можно изменять угловую ориентацию лопаток статора, которые называют лопатками с переменным углом установки. Для этого газотурбинный двигатель содержит систему управления угловым положением лопаток статора компрессора.
В классическом варианте, как схематично показано на фиг.1А, угловое положение лопаток статора двухроторного газотурбинного двигателя М в основном определяют в зависимости от скорости N2 вращения ротора высокого давления и от температуры Т25 на входе компрессора. Для этого система управления содержит средства 20 вычисления заданного значения VSVCAL углового положения лопаток на каждом колесе статора для заданной скорости N2 вращения ротора. Вычисленное заданное значение VSVCAL передают на привод 6 автоматического регулирования, выполненный с возможностью изменения текущего углового положения лопаток статора газотурбинного двигателя М.
Средства 20 вычисления запрограммированы по математическим правилам, которые были определены заранее таким образом, чтобы соответствовать «среднему» двигателю, который не является ни слишком новым (только что вышедшим из завода), ни слишком «изношенным» (предназначенным для ремонта).
На практике реальный двигатель не соответствует «среднему» двигателю, для которого были вычислены математические правила. Математические правила современных систем учитывают предельные требования двигателя (пределы прочности при старении, пределы разбросов от двигателя к двигателю, пределы загрязнения и т.д.). В результате угловое положение лопаток не является оптимизированным для реального двигателя, но является робастным как для нового двигателя, так и для изношенного.
Одним из решений является изменение математических правил таким образом, чтобы можно было учитывать параметры износа двигателя, а также разбросы между двигателями. Однако такое решение является сложным в применении, поскольку параметры являются многочисленными и трудно поддаются моделированию.
Для устранения этих недостатков заявитель предлагает систему управления угловым положением лопаток статора с переменным углом установки компрессора газотурбинного двигателя, содержащего по меньшей мере два ротора, каждый со скоростью вращения (N1 и N2 соответственно), для газотурбинного двигателя, работающего в установившемся режиме, при этом система содержит:
- средства вычисления заданного углового положения лопаток в зависимости от одной из скоростей (N1, N2) и
- модуль коррекции заданного положения, содержащий:
средства определения углового положения лопаток;
средства измерения расхода топлива газотурбинного двигателя;
запоминающее устройство, в котором последовательные угловые положения лопаток связаны со значениями расхода топлива газотурбинного двигателя, измеренными в упомянутых угловых положениях; и
средства определения угла коррекции, выполненные с возможностью вычисления угла коррекции в зависимости от разности между значениями расхода топлива, измеренными между двумя последовательными угловыми положениями лопаток.
Предпочтительно система в соответствии с настоящим изобретением позволяет определять угловое положение лопаток, оптимизирующее расход топлива газотурбинным двигателем. Заявитель определил, что расход топлива газотурбинного двигателя в заданном устоявшемся режиме является функцией углового положения лопаток и что эта функция локально имеет минимум. Иначе говоря, меняя локально угловое положение лопаток, можно определить, в какой степени следует изменить текущее угловое положение лопаток, чтобы ограничить расход топлива. Модуль коррекции в соответствии с настоящим изобретением позволяет дополнить известную систему управления угловым положением лопаток, чтобы улучшить характеристики двигателя в заданном устоявшемся режиме.
В отличие от известных решений, в которых правило определения углового положения лопаток является статическим для всех двигателей без учета разброса параметров двигателя или его износа, система в соответствии с настоящим изобретением позволяет регулировать угловое положение лопаток в зависимости от состояния двигателя. Вместо пересмотра всех параметров износа или разброса двигателя и получения многочисленных и сложных математических правил заявитель напрямую измеряет влияние изменения угла на расход топлива.
Благодаря изобретению производят коррекцию теоретического углового положения, вычисленного на основании математической модели, соответствующей «среднему» двигателю. Такую систему можно очень просто интегрировать в существующий газотурбинный двигатель. Этот новый подход к решению проблемы позволяет определять оптимальное значение углового положения лопаток.
Предпочтительно система содержит сумматор, выполненный с возможностью вычисления оптимизированного заданного положения посредством добавления угла коррекции к заданному угловому положению.
Предпочтительно система содержит привод, выполненный с возможностью автоматического регулирования углового положения лопаток в зависимости от оптимизированного заданного положения. Таким образом, привод изменяет текущее угловое положение, чтобы «следовать» оптимизированному заданному положению.
Предпочтительно модуль коррекции содержит средства контроля состояния газотурбинного двигателя и средства отмены коррекции текущего углового положения лопаток, при этом средства отмены активируют, если состояние газотурбинного двигателя не соответствует коррекции углового положения лопаток.
Средства отмены активируют, если состояние газотурбинного двигателя не соответствует коррекции углового положения лопаток. Средства отмены позволяют по команде средств контроля отменить изменение углового положения лопаток, которое может повлечь угрозу для газотурбинного двигателя или которое не адаптировано к его рабочему состоянию.
Предпочтительно модуль коррекции содержит средства ограничения значения угла коррекции, выполненные с возможностью ограничения значения угла коррекции, чтобы сохранять его в безопасном рабочем диапазоне.
Объектом изобретения является также газотурбинный двигатель, содержащий описанную выше систему управления.
Кроме того, объектом изобретения является способ оптимизации текущего углового положения лопаток статора компрессора газотурбинного двигателя, содержащего по меньшей мере два ротора, каждый из которых вращается с определенной скоростью (N1; N2), для газотурбинного двигателя, работающего в установившемся режиме, в котором:
а) определяют контрольный расход топлива газотурбинного двигателя в контрольном угловом положении лопаток;
b) определяют текущий расход топлива газотурбинного двигателя в текущем угловом положении лопаток;
c) вычисляют угол коррекции в зависимости от разности между контрольным расходом топлива и текущим расходом топлива таким образом, чтобы уменьшить расход топлива;
d) к ранее вычисленному заданному положению добавляют упомянутый угол коррекции, чтобы получить оптимизированное заданное положение;
e) текущее угловое положение лопаток изменяют, чтобы оно соответствовало оптимизированному заданному положению.
Предпочтительно этапы (а)-(е) повторяют, используя в качестве контрольного углового положения на этапе (а) текущее угловое положение этапа (b) предыдущего цикла.
Это позволяет оптимизировать угловое положение лопаток «шаг за шагом», что гарантирует точную оптимизацию, не подверженную нежелательным вторичным эффектам, таким как появление неустановившихся переходных режимов.
Предпочтительно угол коррекции вычисляют при помощи метода оптимизации, предпочтительно градиентным методом понижения топливной функции F, определяющей расход топлива газотурбинного двигателя относительно углового положения лопаток.
Функция F топлива допускает локальный минимум, что обеспечивает сходимость метода оптимизации. Иногда она может быть выпуклой, что обеспечивает наличие оптимального углового положения.
Предпочтительно значение угла коррекции ограничивают пределами, чтобы оставаться в безопасном диапазоне работы (без рисков превышения скорости, помпажа, повышения температуры, …).
Согласно другому варианту применения изобретения контролируют состояние двигателя и отменяют изменение текущего углового положения лопаток, если состояние газотурбинного двигателя не соответствует коррекции углового положения лопаток.
Настоящее изобретение будет более очевидно из прилагаемых чертежей, на которых:
фиг.1А изображает систему управления угловым положением лопаток в соответствии с настоящим изобретением;
фиг.1В - систему управления угловым положением лопаток с модулем коррекции углового положения в соответствии с настоящим изобретением;
фиг.2 - структурную схему первого варианта выполнения системы управления угловым положением лопаток статора газотурбинного двигателя, выполненной с возможностью вычисления угла коррекции;
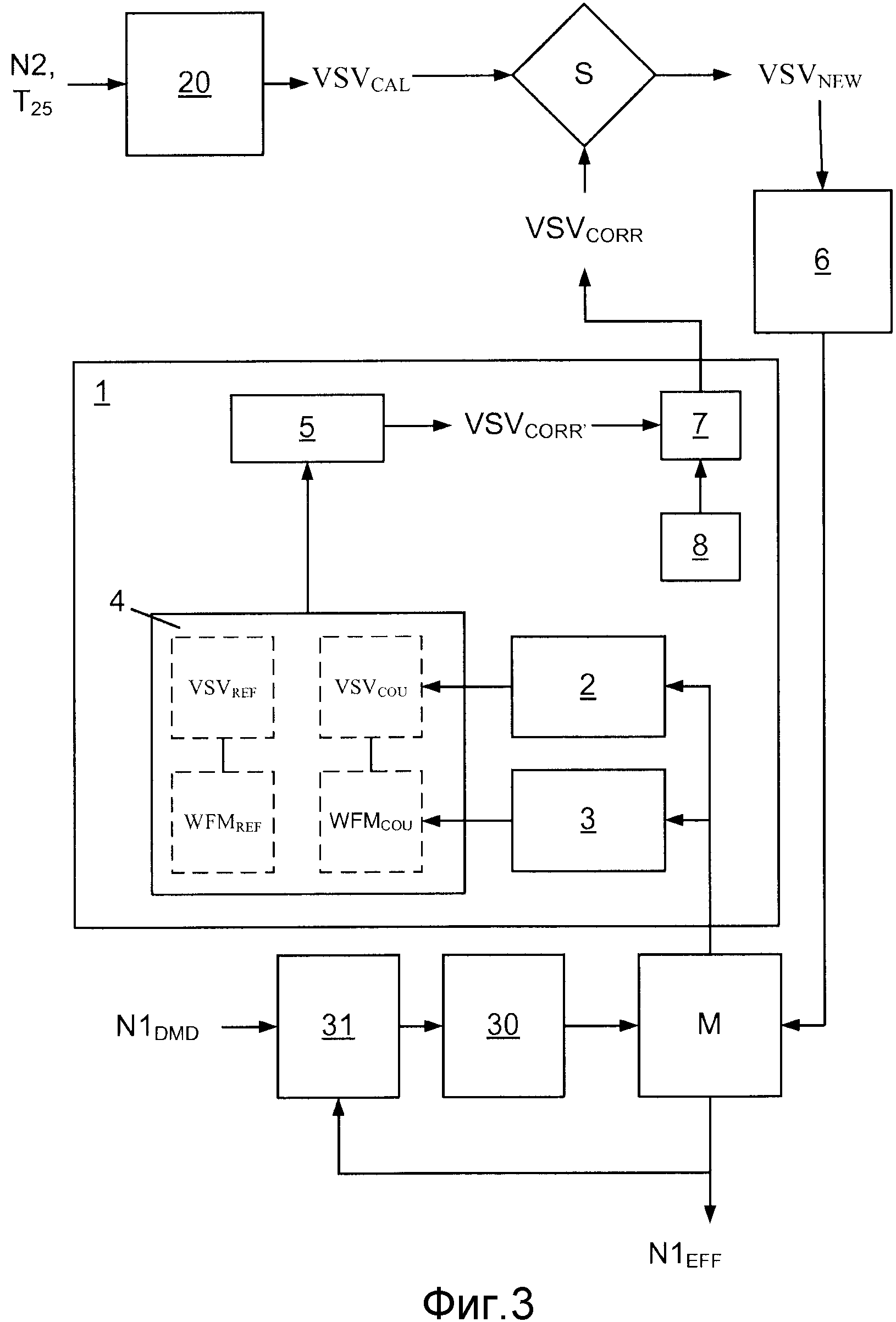
фиг.3 - структурную схему второго варианта выполнения системы управления угловым положением со средствами отмены коррекции;
фиг.4 - структурную схему третьего варианта выполнения системы управления угловым положением со средствами ограничения значения угла коррекции;
фиг.5 - кривую, показывающую изменение расхода топлива двигателя в зависимости от углового положения лопаток статора двигателя для определенного устоявшегося режима двигателя.
Система управления угловым положением лопаток статора компрессора ВД газотурбинного двигателя в соответствии с настоящим изобретением показана на фиг.1В для двухроторного двигателя, содержащего ротор низкого давления НД со скоростью вращения N1 и ротор высокого давления ВД со скоростью вращения N2. При помощи рычага газа управляют двигателем, задавая ему необходимую тягу; тяга напрямую связана со скоростью ротора низкого давления НД. Таким образом, заданное значение тяги предопределяет заданное значение скорости вращения N1DMD ротора НД. Для упрощения обозначение N1, касающееся скорости вращения ротора НД, будет также использовано для тяги двигателя, учитывая, что эти два параметра напрямую связаны друг с другом. Точно так же обозначение N1 может соответствовать другим параметрам, имеющим прямую связь с тягой двигателя, в частности параметру EPR, соответствующему английскому термину «Engine Pressure Ratio» (коэффициент давления двигателя), хорошо известному специалистам в данном области.
В классическом варианте газотурбинный двигатель содержит средства 20 вычисления заданного углового положения VSVCAL лопаток статора в зависимости от скорости вращения N2 ротора высокого давления и от температуры Т25 ротора высокого давления (ВД). Средства 20 вычисления программируют по математическим правилам, хорошо известным специалистам и позволяющим вычислять заданное угловое положение VSVCAL в зависимости от скорости вращения N2 ротора ВД.
Кроме того, система управления в соответствии с настоящим изобретением содержит модуль 1 коррекции заданного положения VSVCAL лопаток статора двигателя М. Модуль 1 коррекции позволяет определять угол коррекции VSVCORR, оптимизирующий расход топлива. Система управления содержит также сумматор S, выполненный с возможностью получения на входе вычисленного заданного значения VSVCAL и угла коррекции VSVCORR, чтобы выдавать на выходе оптимизированное заданное значение VSVNEW, соответствующее сумме двух входных параметров (VSVCORR, VSVCAL). Кроме того, система управления содержит привод 6 автоматического регулирования, который изменяет текущее угловое положение VSVCOU лопаток в зависимости от оптимизированного заданного значения VSVNEW.
Как показано на фиг.1В, система управления содержит модуль 31 оценки топлива, необходимый для поддержания режима вращения N1, называемый также схемой коррекции, которая получает на входе заданное значение режима N1DMD, соответствующее требуемому режиму вращения, то есть задаваемому уровню тяги. Система управления содержит также устройство 30 автоматического регулирования топлива, управляемое схемой 31 коррекции и выполненное с возможностью изменения расхода топлива в зависимости от действительного режима вращения N1EFF двигателя, измеряемого, например, тахометрическим датчиком.
Если расход топлива, задаваемый двигателю М, не позволяет достичь желаемой тяги (N1EFF меньше N1DMD), схема 31 коррекции определяет команду для подачи в устройство автоматического регулирования топлива с целью повышения расхода топлива, поступающего в двигатель М, и следовательно, компенсации отклонения между требуемым режимом N1DMD и действительным режимом N1EFF.
Показанный на фиг.2 модуль 1 коррекции согласно первому варианту выполнения изобретения содержит известные сами по себе средства 2 определения углового положения VSV лопаток, представляющие собой, например, датчики положения, а также средства 3 определения расхода топлива WFM газотурбинного двигателя в данном угловом положении VSV лопаток. Эти средства 3 определения расхода могут быть прямыми, например выполненными в виде датчика, установленного на входе форсунок камеры сгорания газотурбинного двигателя, или непрямыми, например измеряют линейное положение элемента, перекрывающего сечение топливного трубопровода газотурбинного двигателя, при этом размеры сечения известны. Как правило, эти средства 2, 3 определения активированы постоянно для непрерывного отслеживания углового положения лопаток, а также расхода топлива.
Модуль 1 коррекции содержит также запоминающее устройство 4, в котором последовательные угловые положения VSV лопаток связаны со значениями расхода топлива WFM газотурбинного двигателя, измеренными в упомянутых угловых положениях VSV. В течение времени упомянутые средства 2, 3 определения пополняют запоминающее устройство 4 модуля 1 коррекции. На практике запоминающее устройство 4 сохраняет только определенное число пар значений (VSV, WFM), при этом более свежие пары заменяют более устаревшие пары. Например, запоминающее устройство 4 содержит по меньшей мере две пары: пару текущих значений (VSVCOU, WFMCOU) и пару предыдущих значений, называемых контрольными значениями (VSVREF, WFMREF).
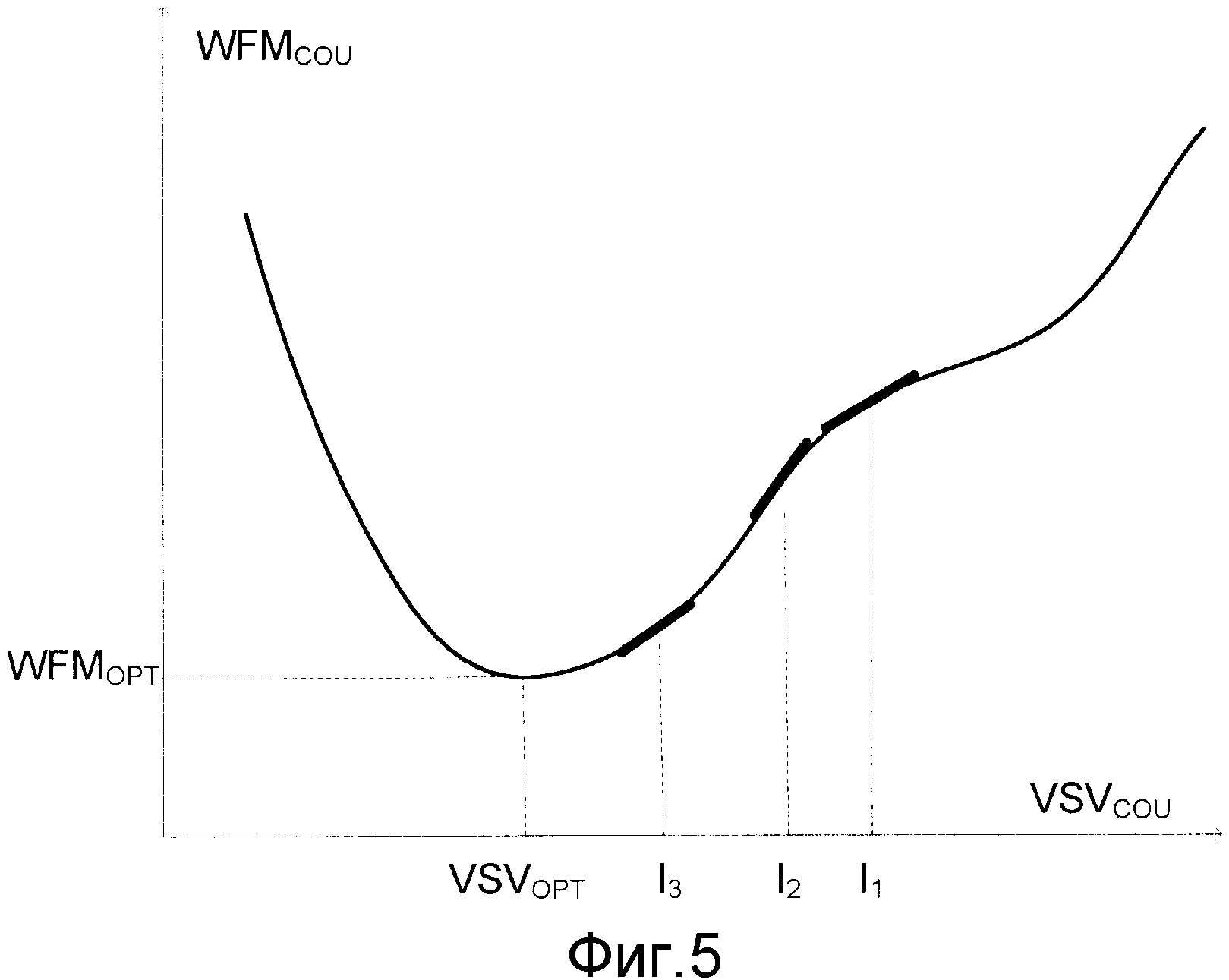
В данном случае ограничиваются работой двигателя в устоявшемся режиме, при этом тяга, создаваемая двигателем, является по существу постоянной в течение времени. Например, при устоявшейся работе скорость вращения N1 является постоянной или параметр EPR является постоянным. В устоявшемся режиме предпочтительно можно отслеживать изменение расхода топлива WFMCOU в зависимости от значения угла лопаток статора VSVCOU, анализируя дискретную функцию, называемую в дальнейшем топливной функцией F, определяемую парами из запоминающего устройства 4 системы 1 управления.
При работе газотурбинного двигателя с постоянной скоростью вращения N1, называемой также «изо N1», заявитель исследовал топливную функцию F, определяющую расход топлива WFMCOU по отношению к угловому положению VSVCOU лопаток, и установил, что эта топливная функция F является локально выпуклой и, следовательно, существует угловое положение лопаток, при котором расход топлива является самым низким, и это оптимальное угловое положение обозначают VSVOPT. На фиг.5 представлена топливная функция F, а также оптимальное угловое положение для определенного устоявшегося режима двигателя.
Угловое положение VSVOPT называют оптимальным положением двигателя по двум причинам. Во-первых, оно является оптимальным относительно определенного устоявшегося режима двигателя, при этом оптимальное угловое положение меняется в зависимости от заданного режима. Во-вторых, оно является оптимальным относительно самого двигателя, при этом угловое положение VSVOPT определяют для двигателя «индивидуально», учитывая, естественно, состояние его износа и разброс производственных допусков. Иначе говоря, с учетом запаса производственных допусков и связанных с монтажом зазоров данный двигатель не будет себя вести точно так же, как другой двигатель этой серии, и каждый двигатель имеет характерное для него оптимальное угловое положение VSVOPT.
Модуль 1 коррекции содержит также средства 5 определения угла коррекции VSVCORR, выполненные с возможностью вычисления угла коррекции VSVCORR в зависимости от разности между значениями расхода топлива, измеренными между двумя последовательными угловыми положениями лопаток. Иначе говоря, угол коррекции VSVCORR не вычисляют посредством анализа собственных параметров двигателя, а посредством оптимизации искомого результата таким образом, чтобы добиться минимально возможного расхода топлива WFMOPT.
Для этого средства 5 определения угла коррекции VSVCORR выполнены с возможностью определения локального минимума топливной функции F при изо N1, причем при известности лишь нескольких значений этой функции (последних последовательных угловых положений). В данном случае средства 5 определения угла коррекции VSVCORR параметрированы по функции оптимизации, которая предназначена для определения угла коррекции VSVCORR с одновременным ограничением его значения. Действительно, если текущее угловое положение VSVCOU изменяется на угол коррекции VSVCORR слишком большого значения, в двигателе появляются неустоявшиеся переходные режимы, которые могут привести к его повреждению.
Принцип оптимизации состоит в локальном изменении текущего углового положения лопаток, в измерении влияния этого углового изменения на действительный расход топлива, чтобы узнать, каким образом изменить текущее угловое положение.
Таким образом, функция оптимизации в соответствии с настоящим изобретением позволяет гарантированно повысить производительность двигателя, ограничивая при этом появление неустоявшихся переходных режимов. Функция оптимизации будет описана для градиентного метода понижения, хотя можно применять и другие методы оптимизации, такие как оптимизация методом наименьших квадратов и т.д. Градиентный метод понижения позволяет очень просто оптимизировать угловое положение.
Используя пары значений (VSVCOU, WFMCOU; VSVREF, WFMREF), сохраняемые в запоминающем устройстве 4, при помощи градиентного метода понижения вычисляют значение градиента топливной функции F в текущем угловом положении VSVCOU лопаток по отношению к предыдущему угловому положению VSVREF. В результате определяют направление схождения топливной функции F. Посредством линейной оптимизации вычисляют угол коррекции VSVCORR в зависимости от значения градиента при текущем угловом положении VSVCOU и от насыщенного инкремента SAT1 и степени схождения µ, при этом степень схождения µ выбирают таким образом, чтобы достичь компромисса между быстрым схождением к оптимальному угловому положению VSVOPT и защитой от появления неустоявшихся переходных режимов в газотурбинном двигателе.
При помощи функции оптимизации выводят значение угла коррекции VSVCORR, который необходимо добавить к заданному положению VSVCAL для получения оптимизированного заданного значения VSVNEW. Привод 6 автоматического регулирования позволяет изменить текущее угловое положение VSVCOU лопаток, чтобы привести его в соответствие с оптимизированным заданным положением VSVNEW. Оптимизированное заданное положение VSVNEW необязательно соответствует оптимальному угловому положению VSVOPT, так как большое изменение текущего углового положения VSVCOU может привести к помпажу компрессора. Предпочтительно оптимизацию осуществляют постепенно посредством итераций.
Благодаря оптимизации углового положения лопаток двигатель регулируют в заданном режиме с более низким расходом топлива. Как показано на фиг.1В, устройство 30 автоматического регулирования по топливу подает команду в схему 31 коррекции на сохранение того же режима N1, несмотря на изменение поведения ротора ВД, связанное с изменением текущего углового положения лопаток. Благодаря этому получают экономию топлива.
Предпочтительно, как показано на фиг.4, модуль 1 коррекции содержит средства 9 ограничения значения угла коррекции VSVCORR, выполненные с возможностью ограничения угла коррекции порогом насыщения градиента SAT2, чтобы избежать появления колебаний во время изменения текущего углового положения VSVCOU лопаток. Кроме того, это позволяет контролировать скорость схождения метода оптимизации. Функцию насыщения SAT2 и насыщенный инкремент SAT1 можно применять вместе или отдельно друг от друга.
Например, метод оптимизации с понижением градиента может отвечать нижеследующему математическому отношению:
VSVCORR(t)=-SAT1[градиент F(VSVCOU)×µ]+VSVCORR(t-1)
VSVCORR'(t)=знак(VSVCORR(t))*min(|VSVCORR(t)|,SAT2)
VSVNEW(t)=VSVCAL(t)+VSVCORR'(t).
Чтобы инициировать процедуру оптимизации, может понадобиться изменить в очень незначительной степени текущее угловое положение лопаток для применения оптимизации и начала процесса. При этом говорят об инициации метода оптимизации путем «возбуждения» системы. Инициализация может быть также результатом математической модели, указывающей направление изменения углового положения VSVлопаток, которое приведет к снижению расхода топлива WFM.
Согласно предпочтительному варианту изобретения, показанному на фиг.3, модуль 1 коррекции содержит средства 7 отмены, выполненные с возможностью аннулирования значения угла коррекции VSVCORR, вычисленного средствами 5 определения угла коррекции. Это позволяет избежать коррекции углового положения лопаток приводом 6 автоматического регулирования, если двигатель не работает в устоявшемся режиме.
Само собой разумеется, что средства 9 ограничения и средства 7 отмены можно применять в одной и той же системе 1 управления.
В этом варианте выполнения средства 7 отмены представляют собой логический вентиль «ИЛИ», связанный со средствами 8 измерения состояния двигателя, то есть «его состояния здоровья». Например, средства 8 измерения состояния двигателя содержат:
- Средства запоминания событий типа помпажа. Если в ходе работы газотурбинного двигателя обнаружен помпаж, происходит блокировка логики средствами 7 отмены.
- Средства измерения допустимой предельной температуры выходных газов, называемой «параметром запаса EGT», что соответствует английскому термину «Exhaust Gas Temperature» (температура отработавших газов), относительно заранее определенного предела. В случае недостаточности запаса происходит блокировка логики средствами 7 отмены.
- Средства оценки состояния компрессора газотурбинного двигателя при помощи датчиков измерения коэффициентов расхода и эффективности компрессора высокого давления. Эти коэффициенты, характеризующие состояние двигателя, сравнивают с заранее определенными пороговыми значениями относительно «здорового» двигателя, то есть двигателя в нормальном состоянии. В случае превышения порога происходит блокировка логики средствами 7 отмены.
- Средства измерения устойчивости работы двигателя, выполненные с возможностью измерения значений, например таких, как скорость ротора НД (N1EFF), скорость ротора ВД (N2) и их разброс. В случае неустоявшегося переходного режима происходит блокировка логики средствами 7 отмены.
Точно так же, если пилот летательного аппарата желает увеличить или уменьшить обороты двигателя, действуя на рычаг газа, коррекция отменяется и не происходит оптимизации углового положения лопаток. Этот контроль осуществляют непоказанные средства отслеживания переходных режимов двигателя.
Объектом изобретения является также способ оптимизации текущего углового положения лопаток статора компрессора газотурбинного двигателя, содержащего по меньшей мере два ротора, каждый из которых вращается на определенной скорости, для газотурбинного двигателя, работающего в устоявшемся режиме, в котором:
а) определяют контрольный расход топлива WFMREF газотурбинного двигателя в контрольном угловом положении VSVREF лопаток;
b) определяют текущий расход топлива WFMCOU газотурбинного двигателя в текущем угловом положении VSVCOU лопаток;
c) вычисляют угол коррекции VSVCORR в зависимости от разности между контрольным расходом топлива WFMREF и текущим расходом топлива WFMCOU таким образом, чтобы уменьшить расход топлива;
d) вычисляют оптимизированное заданное положение VSVNEW, добавляя вычисленный угол коррекции VSVCORR к заданному положению VSVCAL;
e) текущее угловое положение VSVCOU лопаток изменяют, чтобы оно соответствовало оптимизированному заданному положению VSVNEW.
Предпочтительно этапы (а)-(е) повторяют, используя в качестве контрольного углового положения VSVREF на этапе (а) текущее угловое положение VSVCOU этапа (b) предыдущего цикла.
Как показано на фиг.5, угловое положение VSVCOU лопаток оптимизируют после каждой итерации (I1, I2, I3), чтобы минимизировать расход топлива. Это предпочтительно позволяет приблизиться к оптимальному угловому положению VSVOPT, оптимизируя расход топлива в заданном режиме, избегая появления неустоявшихся переходных режимов, которые могут привести к нарушению работы двигателя в случае резкого изменения углового положения лопаток.
Предпочтительно устойчивость режима двигателя тестируют и изменение текущего углового положения VSVCOU лопаток отменяют в случае неудачного теста на устойчивость, что описано в связи с системой управления в соответствии с настоящим изобретением.
Реферат
Система управления угловым положением лопаток статора, содержащая средства вычисления заданного углового положения (VSV) лопаток в зависимости от одной из скоростей (N1, N2) и модуль коррекции заданного положения (VSV), содержащий: средства определения углового положения (VSV) лопаток; средства измерения расхода топлива (WFM) газотурбинного двигателя; запоминающее устройство, в котором последовательные угловые положения (VSV, VSV) лопаток связаны со значениями расхода топлива (WFM, WFM) газотурбинного двигателя, измеренными в упомянутых угловых положениях (VSV, VSV); средства определения угла коррекции (VSV) в зависимости от разности между значениями расхода топлива (WFM, WFM), измеренными между двумя последовательными угловыми положениями (VSV, VSV) лопаток. Изобретение касается также способа оптимизации упомянутого текущего углового положения. Технический результат изобретения - оптимизация углового положения лопаток статора компрессора газотурбинного двигателя. 3 н. и 5 з.п. ф-лы, 6 ил.
Формула
- средства (20) вычисления заданного углового положения (VSVCAL) лопаток в зависимости от одной из скоростей (N1, N2) и
- модуль (1) коррекции заданного положения (VSVCAL), содержащий:
средства (2) определения углового положения (VSV) лопаток;
средства (3) измерения расхода топлива (WFM) газотурбинного двигателя;
запоминающее устройство (4), в котором последовательные угловые положения (VSVCOU, VSVREF) лопаток связаны со значениями расхода топлива (WFMCOU, WFMREF) газотурбинного двигателя, измеренными в упомянутых угловых положениях (VSVCOU, VSVREF);
средства (5) определения угла коррекции (VSVCORR), выполненные с возможностью вычисления угла коррекции (VSVCORR) в зависимости от разности между значениями расхода топлива (WFMCOU, WFMREF), измеренными между двумя последовательными угловыми положениями (VSVCOU, VSVREF) лопаток;
- сумматор (S), выполненный с возможностью вычисления оптимизированного заданного положения (VSVNEW) посредством добавления угла коррекции (VSVCORR) к заданному угловому положению (VSVCALC), и
- привод (6), выполненный с возможностью автоматического регулирования углового положения лопаток в зависимости от оптимизированного заданного положения (VSVNEW).
а) определяют контрольный расход топлива (WFMREF) газотурбинного двигателя в контрольном угловом положении (VSVREF) лопаток;
b) определяют текущий расход топлива (WFMCOU) газотурбинного двигателя в текущем угловом положении (VSVCOU) лопаток;
c) вычисляют угол коррекции (VSVCORR) в зависимости от разности между контрольным расходом топлива (WFMREF) и текущим расходом топлива (WFMCOU) таким образом, чтобы уменьшить расход топлива;
d) вычисляют оптимизированное заданное положение (VSVNEW), добавляя вычисленный угол коррекции (VSVCORR) к заданному положению (VSVCAL);
e) текущее угловое положение (VSVCOU) лопаток изменяют, чтобы оно соответствовало оптимизированному заданному положению (VSVNEW).
- этапы (а)-(е) повторяют, используя в качестве контрольного углового положения (VSVREF) на этапе (а) текущее угловое положение (VSVCOU) этапа (b) предыдущего цикла.
- вычисляют угол коррекции (VSVCORR) при помощи метода оптимизации, предпочтительно при помощи градиентного метода понижения топливной функции F, определяющей расход топлива (WFM) газотурбинного двигателя, по отношению к угловому положению (VSV) лопаток.
Комментарии