Поезд-укладчик дорожного покрытия - RU2133790C1
Код документа: RU2133790C1
Чертежи



Описание
Изобретение относится к поезду-укладчику дорожного покрытия.
Для нанесения слоев дорожного покрытия из битума или бетона, например, для нанесения слоев двухслойного покрытия, комбинируются два или более укладчиков так, чтобы образовать поезд-укладчик дорожного покрытия. Наименьший поезд-укладчик дорожного покрытия содержит либо два укладчика дорожного покрытия, либо один укладчик дорожного покрытия и одно загрузочное устройство. Механическое соединение (US-A-5100277) в случае применения самоходных укладчиков осуществляться не может, поскольку соответствующие перемещения укладчиков никогда не согласуются по причинам, связанным с геометрией и механикой. В связи с этим задачей водителей было сохранение как можно более постоянной дистанции между укладчиками. В применяемых на практике поездах-укладчиках дорожного покрытия укладчики, движущиеся в колонне, управляются соответствующим количеством очень опытных водителей из соответствующих кабин, включающих устройства для управления работой. Так называемый путевой контроллер управления применяется в каждом укладчике для включения и выключения проводов самоходных механизмов и всех укладчиков дорожного покрытия. Параметры (скорость движения, уровень установки разравнивающего дорожное покрытие бруса, скорость трамбовки и вибрация), которые были предварительно заданы до остановки, автоматически и точно восстанавливаются для каждого укладчика, когда укладчик вновь начинает движение. Автоматические системы рулевого управления используются для контроля за направлением, при этом указанные автоматические системы рулевого управления регулируются относительно эталонной линии. Вспомогательные устройства облегчают работу водителей, но они не решают проблему соблюдения соответствующих дистанций.
Когда укладывается двухслойное или многослойное дорожное покрытие, дистанция между соответствующими укладчиками дорожного покрытия поезда-укладчика должна сохраняться постоянной с высокой степенью точности, поскольку если дистанция изменится, температурные условия для нанесения соответствующего последующего слоя изменятся и заметно ухудшат конечное качество покрытия. Если по меньшей мере одно загрузочное устройство включено в поезд-укладчик дорожного покрытия, то из-за присутствия этого загрузочного устройства становится еще труднее соблюдать соответствующие дистанции, особенно между укладчиками дорожного покрытия.
EP-A-0667415 описывает применение измерения дистанции и уровня заполнения для автоматизации операции загрузки при загрузке укладчика дорожного покрытия из грузовика или загрузочного устройства.
Другие устройства предшествующего уровня техники описаны в патентах FR-A-2697547 (WO 941038A) и DE 9204559.
Техническим результатом настоящего изобретения является создание поезда-укладчика дорожного покрытия, обеспечивающего нанесение высококачественного дорожного покрытия при высокоавтоматизированном процессе и с постоянным качеством.
Этот технический результат достигается тем, что поезд-укладчик дорожного покрытия, используемый для производства слоя покрытия из битумного или бетонного материала дорожного покрытия в районе дорожного движения и состоящий из по меньшей мере двух независимо управляемых элементов поезда, приспособленных для управления ими в составе поезда, главным образом, множества укладчиков дорожного покрытия или одного загрузочного устройства и по меньшей мере одного укладчика дорожного покрытия, согласно изобретению по меньшей мере один из элементов поезда выполнен с возможностью выполнения функций командной машины для дистанционного управления каждым другим элементом поезда и управляет каждым другим элементом поезда при помощи дистанционного управления.
Весь поезд-укладчик дорожного покрытия может управляться из кабины управления одного укладчика. По меньшей мере один дополнительный укладчик не требует отдельного водителя. В командном укладчике различные рабочие параметры устанавливаются, например, всего одним водителем или из отдельного центра управления. Кроме того, начало работы, изменения скорости и остановки управляются централизованно. По меньшей мере один дополнительный укладчик управляется командным укладчиком, при этом необходимые и уместные рабочие параметры, начало работы или остановка будут также выполняться по меньшей мере одним дополнительным укладчиком в реальном масштабе времени. Контрольные измерения для поддержания дистанции могут также дополнительно приниматься во внимание в этой связи. Качество наносимого покрытия высоко и постоянно, поскольку недопустимые изменения дистанции устраняются.
Несмотря на подбор одинаковых скоростей (предопределенное заданное значение для движения), соответствующие укладчики будут, возможно, двигаться с различными скоростями, несмотря на то, что они имеют дистанционное управление, по причинам, связанным с геометрией, механикой и гидростатикой и из-за разных средств тяги. Согласно настоящему изобретению устройство коррекции скорости с датчиком дистанции превалирует над дистанционным управлением, поддерживая заданную дистанцию.
Было бы целесообразно, чтобы каждый укладчик из укладчиков, составляющих поезд-укладчик дорожного покрытия, мог приспосабливаться для работы в качестве командной машины. Конструктивные предварительные условия и предварительные условия, относящиеся к области замкнутого технологического цикла, требуемые для выполнения функций командной машины, должны быть предусмотрены в каждом укладчике. Будет, однако, целесообразно придать функции командной машины укладчику, выполняющему головную роль в поезде-укладчике дорожного покрытия, принимая во внимание качество наносимого дорожного покрытия.
Предпочтительно, дистанционное управление применяется для передачи всех необходимых рабочих параметров всем укладчикам. Устройство коррекции скорости работает на соответствующем отдельном укладчике, не являющемся командной машиной. Коррекция скорости предназначена для поддержания постоянной дистанции между соответствующими укладчиками. Другие рабочие параметры могут оставаться не затронутыми этой коррекцией.
Согласно предпочтительному варианту воплощения
изобретения скорость может контролироваться так, что дистанция между двумя соответствующими укладчиками
остается постоянной. Текущее заданное значение, исходящее от командной машины, является лишь
эталонным значением в ходе управления, которое точно выполняется как реакция на поступающие или измеренные
изменения дистанции. Это легко выполнимо за счет увеличения или уменьшения заданного
значения в зависимости от того, имеет ли дистанция тенденцию к увеличению или уменьшению
С точки зрения
технологии управления решение проблемы не требует больших затрат.
Датчики дистанции будут пригодными элементами для отслеживания изменений дистанции и для производства сильных пригодных сигналов об изменениях дистанции.
В соответствии с простым конструктивным устройством кабельная связь проведена так, что она проходит от кабины управления командной машины к каждой кабине управления соответствующих других укладчиков.
В альтернативном варианте может применяться беспроводная передача сигналов с применением одного или более передатчиков и соответствующего количества приемников на других укладчиках.
Целесообразный поезд-укладчик дорожного покрытия служит для укладки двухслойного дорожного покрытия, и промежуточная дистанция между двумя укладчиками дорожного покрытия поддерживается постоянной. Если передний укладчик дорожного покрытия является командной машиной, скорость движения заднего укладчика дорожного покрытия будет увеличиваться, если дистанция становится большей, и уменьшается, если дистанция становится меньшей. Если задний укладчик дорожного покрытия является командной машиной, скорость переднего укладчика дорожного покрытия уменьшается при увеличении дистанции и увеличивается при уменьшении дистанции.
Если дополнительно применяется загрузочное устройство, постоянная дистанция поддерживается между укладчиком дорожного покрытия и загрузочным устройством при помощи дистанционного управления так, чтобы гарантировать постоянную подачу в укладчик дорожного покрытия материала, представляющего дорожное покрытие, должным образом и так, чтобы избежать остановок процесса укладки указанного материала.
В целесообразном варианте состава поезда-укладчика дорожного покрытия двойное загрузочное устройство загружает два укладчика дорожного покрытия, следующих за указанным двойным загрузочным устройством, дистанция между указанными укладчиками дорожного покрытия и дистанция между передним укладчиком дорожного покрытия и загрузочным устройством поддерживается постоянной, и нанесение материала дорожного покрытия контролируется из одной кабины управления.
В поезде-укладчике дорожного покрытия, содержащем четыре укладчика, все указанные четыре укладчика могут управляться из одной кабины управления, и дистанция между соответствующими укладчиками сохраняется постоянной. Два передних укладчика дорожного покрытия могут загружаться из грузовиков обычным способом. В случае, когда укладчик дорожного покрытия движется сзади, это невозможно и поэтому этот укладчик дорожного покрытия снабжается материалом для дорожного покрытия из загрузочного устройства, движущегося между двумя передними укладчиками дорожного покрытия, и указанный материал для дорожного покрытия проходит над разравнивающими дорожную поверхность брусами двух передних укладчиков дорожного покрытия.
Согласно настоящему изобретению водитель требуется только в кабине управления командной машины. Значения параметров, которые относятся к загрузочному устройству, передаются устройством дистанционного управления.
Согласно целесообразному варианту воплощения изобретения укладчики поезда-укладчика дорожного покрытия направляются вдоль эталонной линии движения при помощи автоматических рулевых устройств.
Загрузочное устройство может ориентироваться укладчиком дорожного покрытия, движущимся сзади него так, что оптимальное выравнивание относительно укладчика дорожного покрытия, который должен загружаться, будет также контролироваться.
Варианты воплощения настоящего изобретения будут описаны со ссылками на чертежи, на которых:
фиг. 1 схематически
изображает вид сверху первого варианта воплощения поезда-укладчика
дорожного покрытия;
фиг. 2 изображает вариант воплощения поезда-укладчика дорожного покрытия, который модифицирован по
сравнению с показанным на фиг.1;
фиг. 3 изображает другой
вариант воплощения поезда-укладчика дорожного покрытия;
фиг. 4 изображает другой вариант воплощения поезда-укладчика
дорожного покрытия;
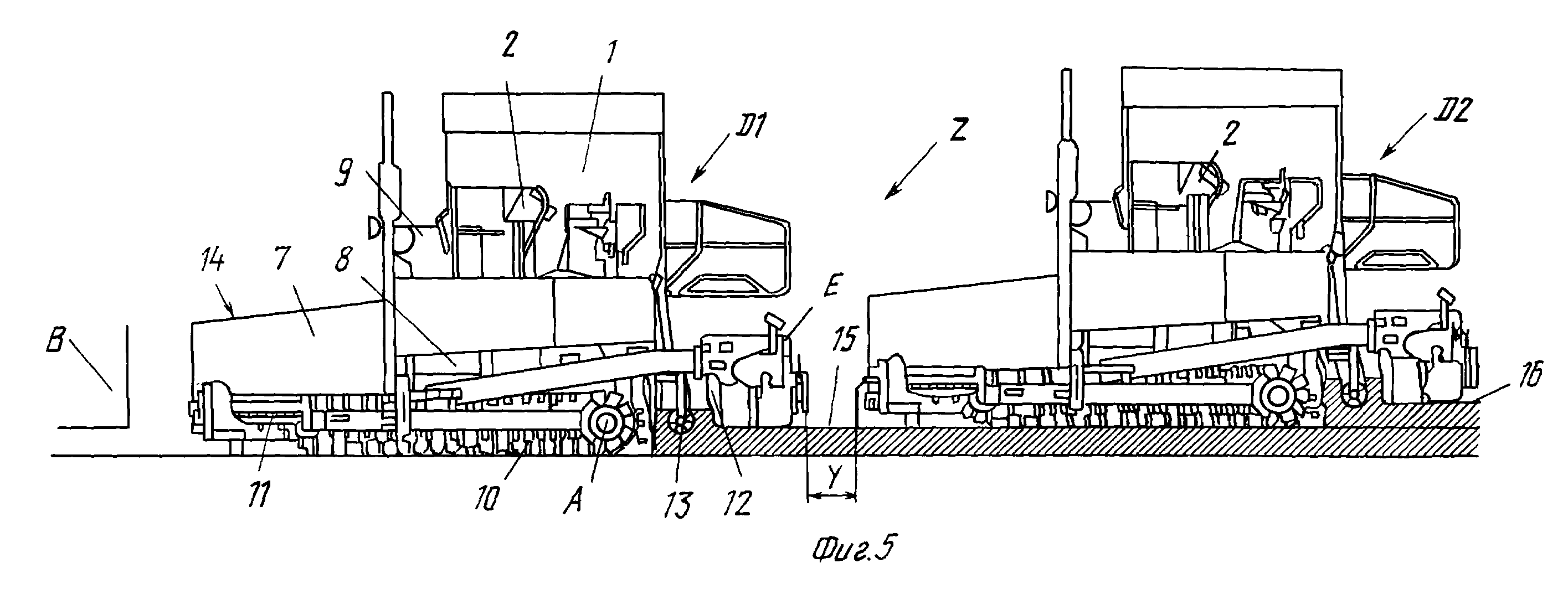
фиг. 5 изображает вид сбоку поезда-укладчика
дорожного покрытия;
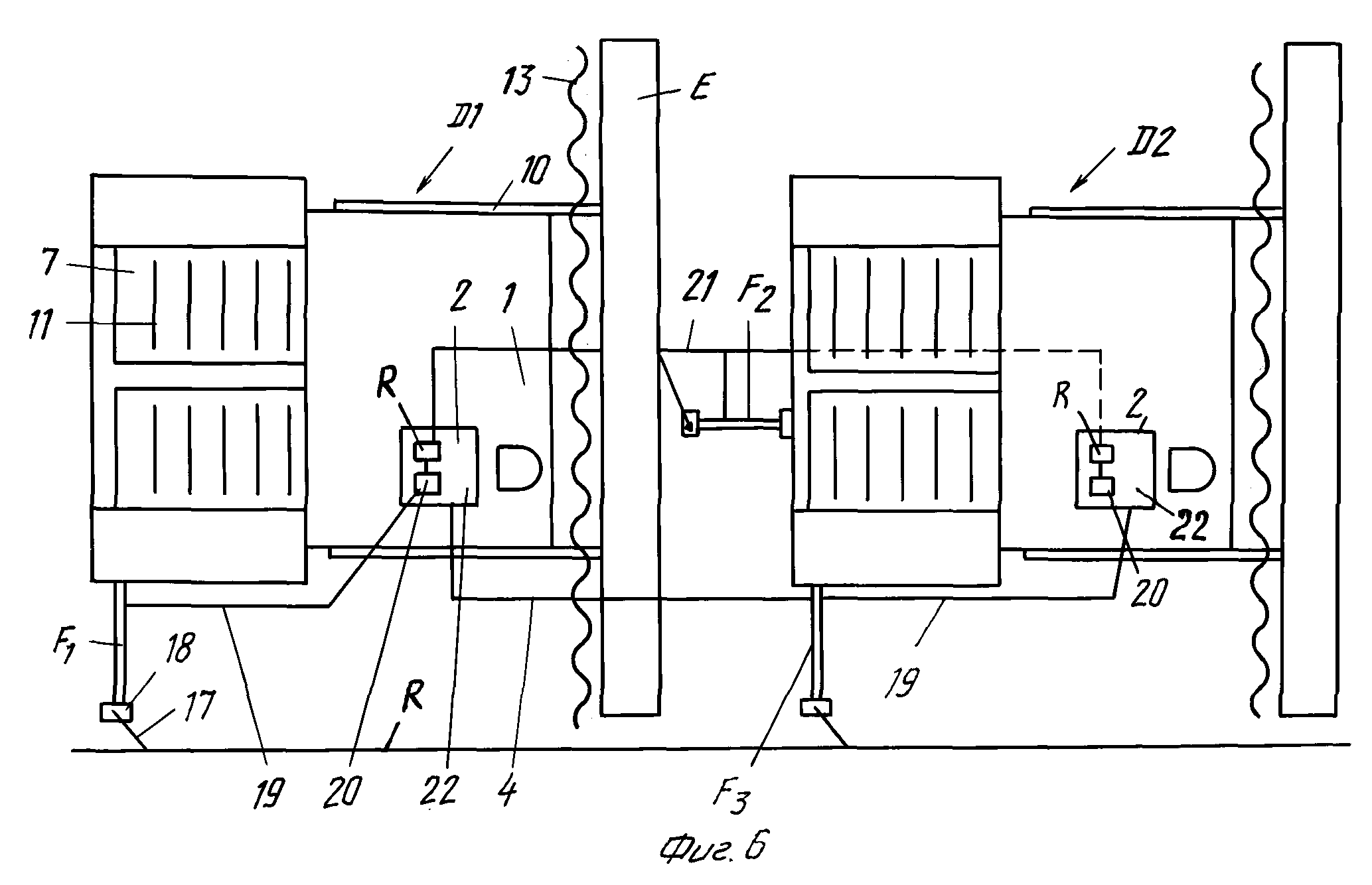
фиг. 6 изображает увеличенный вид сверху поезда-укладчика, показанного на фиг. 5;
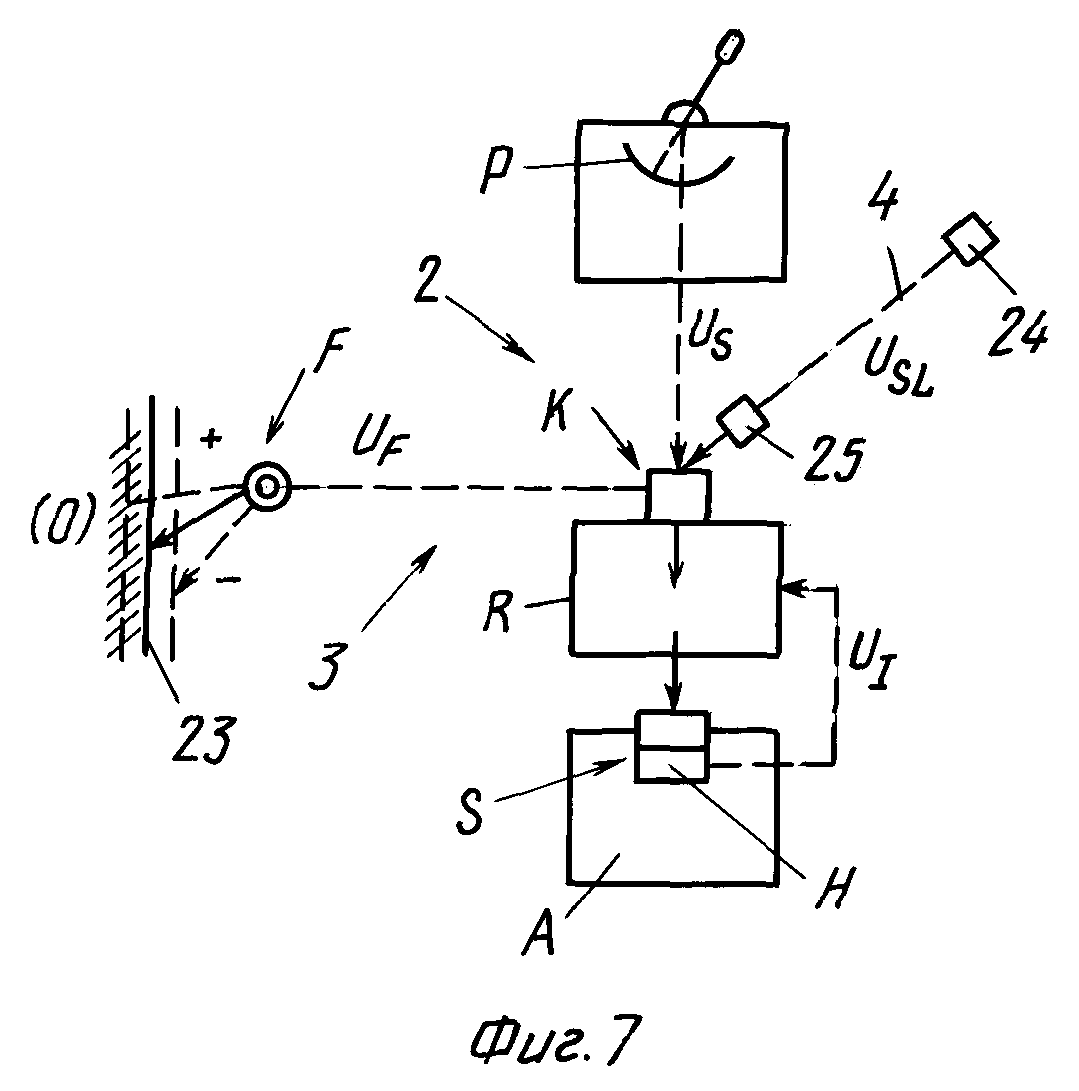
фиг. 7
схематически изображает принцип управления.
Различные варианты воплощения изобретения, описанные далее, являются лишь небольшой избранной частью. Варианты воплощения деталей лишь схематически показаны и описаны так, что становится понятной основная концепция изобретения. Детали, относящиеся к технике управления и непрерывного цикла производства, также показаны и описаны в упрощенном варианте и могут реализовываться на практике в модифицированной и более сложной форме.
Поезд-укладчик 2 дорожного покрытия для нанесения двухслойного покрытия из битумного или бетонного материала (фиг. 1, 5 и 6) состоит из по меньшей мере двух укладчиков D1, D2 дорожного покрытия, движущихся вдоль эталонной линии R на предопределенной дистанции Y друг от друга. Каждый укладчик D1, D2 дорожного покрытия содержит кабину 1 водителя, включающую устройство 2 управления работой, которое имеет включенную в него, например, автоматическую систему рулевого управления, и несет разравнивающий брус E для нанесения дорожного покрытия с элементами для нанесения дорожного покрытия (фиг. 5), например, устройством 12 для трамбовки. По меньшей мере в случае с устройством управления работой 2 заднего укладчика D2 дорожного покрытия применяется устройство 3 корректировки скорости, которое соединено с датчиком F2 дистанции, отслеживающим дистанцию Y и генерирующим, в качестве реакции на изменение дистанции, положительные или отрицательные корректирующие сигналы для устройства 3 коррекции скорости наряду с другими компонентами. Устройство 2 управления работой и устройство 3 коррекции скорости, соответственно, заднего укладчика D2 дорожного покрытия соединены с устройством 2 управления работой переднего укладчика D1 дорожного покрытия каналом 4 передачи сигналов. Каналом 4 передачи сигналов может быть кабель. В альтернативном варианте или в дополнение к кабелю можно обеспечить беспроводную передачу сигналов, например, при помощи передатчика 24 и приемника 25, как показано на фиг. 7.
Поезд-укладчик 2 дорожного покрытия, показанный на фиг. 1, 5, 6, управляется из кабины 1 водителя переднего укладчика D1 дорожного покрытия, который служит командной машиной (на фиг. 1 подчеркнут). Рабочие параметры для заднего укладчика D2 дорожного покрытия передаются, например, по каналу 4 передачи сигналов и включают, например, заданные значения скорости движения, установки уровня разравнивающего бруса E для укладки дорожного покрытия, скорости трамбовки, вибрации разравнивающего бруса E для нанесения дорожного покрытия и т. п. Однако также возможно установление индивидуальных рабочих параметров для заднего укладчика дорожного покрытия или, предпочтительно, для каждого укладчика дорожного покрытия отдельно. Кроме того, дистанционным управлением передаются команды для начала движения или остановки, так же как и команды для включения и выключения элементов поезда для укладки дорожного покрытия. Если заданное значение для скорости движения заднего укладчика D2 дорожного покрытия приводит к тому, что скорость указанного заднего укладчика дорожного покрытия постоянно или лишь временно слишком велика или слишком мала, датчик F2 дистанции активизируется, сигналы коррекции указанного датчика F2 дистанции учитываются устройством 3 коррекции скорости так, чтобы поддерживать дистанцию Y постоянной. Датчик F2 дистанции является, например, угловым кодирующим устройством.
Для направления обоих укладчиков D1, D2 дорожного покрытия вдоль эталонной линии R движения используются датчики F1, F3 дистанции, которые передают сигналы коррекции соответствующему автоматическому устройству 4 управления. Водитель, в принципе, требуется только в кабине водителя 1 переднего укладчика дорожного покрытия D1.
На фиг. 5 загрузочное устройство B, показанное в варианте воплощения поезда-укладчика Z, показанного на фиг. 3, показан контуром спереди от переднего укладчика D1 дорожного покрытия, представляющего командную машину этого поезда-укладчика Z дорожного покрытия.
Каждый укладчик D1 дорожного покрытия содержит на шасси 8 передний бункер 7 для материала 14, представляющего собой дорожное покрытие. Продольный конвейер 11, размещенный на указанном шасси 8, подает материал для дорожного покрытия назад, в точку, находящуюся перед разравнивающим брусом E для укладки дорожного покрытия, и к поперечному распределительному устройству 13, находящемуся в заднем конце шасси и обычно являющемуся винтовым шнеком. Шасси 8 установлено на ходовой части 10 (колесной или гусеничной), которая приводится одним или двумя приводными элементами A. В кабине водителя 1 укладчика D1 дорожного покрытия расположено устройство 2 управления работой, от которого кабель 4 проведен к кабине водителя заднего укладчика D2 дорожного покрытия. Первый укладчик D1 дорожного покрытия укладывает первый слой 15, на который задний укладчик D2 дорожного покрытия укладывает второй слой 16.
Согласно фиг.6, датчики F1, F2, F3 дистанции являются угловыми кодирующим устройствами, содержащими чувствительный элемент 17, который приспособлен для смещения угловым движением и который прикреплен к элементу 18, генерирующему сигнал. Датчик дистанции, например, F1 отрегулирован на предопределенную дистанцию, например, от эталонной линии R движения. Если действительное значение указанной дистанции соответствует заданному значению, датчик F1 дистанции не будет производить каких-либо корректирующих сигналов. Если действительное значение изменяется по сравнению с заданным значением, датчик F1 дистанции будет производить положительные или отрицательные корректирующие сигналы. Другие датчики F2 и F3 дистанции имеют такое же устройство. В альтернативном варианте, в качестве датчика дистанции могут применяться дешифраторы линейных штрихов или ультразвуковые, радиолокационные или лазерные датчики. Датчик F1 дистанции соединен сигнальной линией 19 с путевым контроллером управления или устройством управления 20 движением устройства управления 2 работой так же, как и датчик F3 дистанции заднего укладчика D2 дорожного покрытия. Датчик F2 дистанции, который отслеживает дистанцию между передним концом заднего укладчика D2 дорожного покрытия и задним концом разравнивающего бруса E для укладки дорожного покрытия переднего укладчика D1 дорожного покрытия, соединен сигнальной линией 21, например, с блоком R' управления скоростью движения устройства 2 управления работой переднего укладчика D1 дорожного покрытия, используемого в качестве командной машины в этом случае.
В поезде-укладчике Z дорожного покрытия, согласно фиг. 2, задний укладчик дорожного покрытия (подчеркнут) является командной машиной. От устройства 2 управления работой указанного укладчика дорожного покрытия также проведен канал 4 передачи сигналов устройству 3 коррекции скорости переднего укладчика D1 дорожного покрытия. Датчик F2 дистанции соединен с устройством коррекции скорости переднего укладчика D1 дорожного покрытия. В этом случае будет целесообразно разместить датчик F2 дистанции на переднем укладчике D1 дорожного покрытия. На фиг. 6 такое устройство, соответствующее фиг. 2 (задний укладчик D2 дорожного покрытия является командной машиной), обозначено прерывистой линией, соединяющей датчик F2 дистанции и средство R'' управления заднего укладчика дорожного покрытия D2.
Поезд-укладчик Z дорожного покрытия, соответствующий фиг. 3, отличается от упомянутых выше поездов-укладчиков дорожного покрытия применением загрузочного устройства B, которое движется впереди переднего укладчика D1 дорожного покрытия на некотором расстоянии от него и которое служит, например, двойным загрузочным устройством, подающим по конвейерам 5, 6, которые обозначены точками и тире, материал дорожного покрытия (одного типа или разных типов) к переднему укладчику D1 дорожного покрытия и к заднему укладчику D2 дорожного покрытия. Передний укладчик D1 дорожного покрытия является командной машиной, которая для обеспечения дистанционного управления соединена с задним укладчиком D2 дорожного покрытия каналом 4 передачи сигналов и с загрузочным устройством B другим каналом 4' передачи сигналов. Загрузочное устройство B также имеет устройство 2 управления работой, расположенное в кабине 1' водителя, устройство 2 управления работой оснащено устройством 3 коррекции скорости, к которому присоединен канал 4' передачи сигналов. В дополнение к этому применяется другой датчик F4 дистанции, который установлен надлежащим способом на загрузочном устройстве B и который соединяется с устройством 3 коррекции скорости так, чтобы поддерживать постоянную дистанцию между загрузочным устройством B и передним укладчиком D1 дорожного покрытия.
Линия X из точек и тире на фиг. 3 обозначает что, поезд-укладчик дорожного покрытия может содержать только загрузочное устройство B и передний укладчик D1 дорожного покрытия.
Поезд-укладчик Z дорожного покрытия, показанный на фиг. 4, предназначен для укладки двух слоев материала дорожного покрытия и состоит из двух передних укладчиков D1, D2 дорожного покрытия, движущихся друг за другом, но со смещением относительно друг друга, и третьего укладчика D3 дорожного покрытия, движущегося за первыми упомянутыми двумя укладчиками приблизительно посередине между ними, разравнивающий брус E для нанесения дорожного покрытия третьего укладчика D3 дорожного покрытия простирается по всей ширине слоя покрытия. В дополнение к этому, загрузочное устройство B движется между двумя передними укладчиками D1, D2 дорожного покрытия, указанное загрузочное устройство B подает к заднему укладчику D3 дорожного покрытия при помощи конвейера 6, обозначенного линией из точек и тире, материал дорожного покрытия, который проходит над разравнивающими брусами E двух передних укладчиков D1, D2 дорожного покрытия. Два передних укладчика D1, D2 дорожного покрытия загружаются либо из грузовиков обычным способом, либо загрузочным устройством B, либо другими загрузочными устройствами.
Укладчик D1 дорожного покрытия является командной машиной, которая управляет двумя другими укладчиками D2, D3 дорожного покрытия и загрузочным устройством B по каналам 4, 4' и 4'' передачи сигналов. Датчик F2 дистанции, размещенный, например, на заднем укладчике D3 дорожного покрытия, отслеживает дистанцию от указанного заднего укладчика D3 дорожного покрытия до разравнивающего бруса для укладки дорожного покрытия переднего укладчика D1 дорожного покрытия. Другой датчик F4 дистанции, размещенный, например, на загрузочном устройстве B, отслеживает дистанцию между указанным загрузочным устройством B и задним укладчиком D3 дорожного покрытия, причем указанная дистанция отслеживается по направлению движения. Датчик F5 дистанции, размещенный на переднем укладчике D2 дорожного покрытия, отслеживает дистанцию между укладчиком D2 дорожного покрытия и контрольным элементом 23 переднего укладчика D1 дорожного покрытия. Боковые датчики F1, F3 и F7 дистанции соединены с соответствующим автоматическим устройством управления. Загрузочное устройство B направляется рядом с передним укладчиком D1 дорожного покрытия при помощи еще одного датчика F6 дистанции.
Фиг. 7 ясно показывает схематическое изображение устройства 3 коррекции скорости, соединенное с устройством управления работой 2, например, заднего укладчика D2 дорожного покрытия, показанного на фиг. 1.
Для автоматического управления рабочей скоростью укладчика дорожного покрытия (без дистанционного управления) заданное значение US скорости движения устанавливается рычагом управления движением. Это заданное значение подается на контроллер R'', приводящий в действие приводной элемент S, например, гидравлический двигатель P так, чтобы установить скорость движения. Действительная скорость U1 движения определяется и передается на контроллер R'''. Контроллер R''' обеспечивает соответствие действительной скорости движения и заданной скорости движения.
Датчик F дистанции отрегулирован на определенную дистанцию Y от контрольного элемента 23. Если дистанция правильная, датчик F дистанции не будет производить каких-либо сигналов (0). Контроллер R''' работает на основании US и U1. Если дистанция становится большей, датчик F дистанции будет производить положительный сигнал UF коррекции (например, уровень напряжения), который оценивается устройством K коррекции, который, в свою очередь, увеличит заданное значение US для контроллера R''' так, чтобы увеличить скорость движения укладчика дорожного покрытия до тех пор, пока не будет восстановлена дистанция Y.
Если дистанция становится меньшей, датчик F дистанции будет производить отрицательный сигнал коррекции UF, который оценивается устройством K коррекции так, чтобы уменьшить заданное значение US для контроллера R'''. Контроллер R''' соответственно управляет приводным элементом S.
Для управления укладчиком D2 дорожного покрытия при помощи дистанционного управления, канал 4 передачи сигналов соединяется, например, с каналом передачи заданных значений, ведущим к устройству K коррекции, канал 4 передачи сигналов 4 соединяется, например, кабелем или в беспроводной форме (передатчик 24 и приемник 25). Заданное значение USL, поступающее от командной машины, принимается устройством K коррекции и учитывается контроллером R'''. В устройстве K коррекции учитываются также сигналы, поступающие от датчика F дистанции так, чтобы уменьшать или увеличивать заданное значение USL в соответствии с изменениями дистанции. Будет целесообразно на этой рабочей стадии пассивировать управление скоростью дистанционно управляемого укладчика дорожного покрытия.
В случае с модифицированным вариантом воплощения изобретения устройство 2 управления работой командной машины может принимать, оценивать и обрабатывать сигналы коррекции всех датчиков дистанции, которые действуют по направлению движения так, чтобы скорости дополнительных элементов поезда могли контролироваться из указанной командной машины таким образом, чтобы дистанции оставались постоянными. Все датчики дистанции, действующие по направлению движения, должны применяться на командной машине. Предпочтительно, автоматическое устройство управления командной машины может непосредственно управлять даже автоматическими устройствами других элементов поезда.
Реферат
Поезд-укладчик дорожного покрытия, используемый для производства слоя покрытия из битумного или бетонного материала дорожного покрытия в районе движения транспорта и состоящий из по меньшей мере двух независимо управляемых элементов поезда, приспособленных для управления ими в составе поезда главным образом множества укладчиков дорожного покрытия или одного загрузочного устройства и по меньшей мере одного укладчика дорожного покрытия. По меньшей мере один из элементов поезда выполнен с возможностью осуществления функций командной машины для дистанционного управления каждым другим элементом поезда. Поезд-укладчик обеспечивает нанесение высококачественного дорожного покрытия при высокоавтоматизированном процессе. 15 з.п. ф-лы, 7 ил.

Комментарии