Самоходная фрезерная машина, а также способ выгрузки сфрезерованного материала - RU2631747C2
Код документа: RU2631747C2
Чертежи


Описание
Изобретение относится к самоходной фрезерной машине в соответствии с ограничительной частью пункта 1 формулы изобретения, а также к способу выгрузки сфрезерованного материала в соответствии с ограничительной частью пункта 11 формулы изобретения и к дорожному или земляному рабочему агрегату в соответствии с пунктом 15 формулы изобретения.
Для самоходной фрезерной машины известна выгрузка сфрезерованного материала по меньшей мере на одно транспортное средство, содержащее погрузочную поверхность.
Фрезерная машина содержит контроллер для операций перемещения и фрезерования, а также рабочий барабан для фрезерования, например, дорожного покрытия. Впереди или позади рабочего барабана, если смотреть в направлении движения, имеется транспортировочное конвейерное устройство, например, транспортировочное конвейерное устройство, содержащее по меньшей мере один транспортировочный конвейер. Транспортировочное конвейерное устройство содержит разгрузочный конец, на котором сфрезерованный материал выгружается на погрузочную поверхность по меньшей мере одного транспортного средства по траектории полета в форме параболической траектории, обусловленной скоростью транспортировки. Последний или единственный транспортировочный конвейер транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, может быть повернут в сторону, относительно продольной оси фрезерной машины, под задаваемым углом поворота влево или вправо и может регулироваться по высоте посредством задаваемого угла подъема. В дополнение, может регулироваться скорость транспортировки транспортировочного конвейера.
При практической работе, возникают проблемы с координированием фрезерной машины с транспортным средством.
Например, у фрезерной машины с передней загрузкой сфрезерованный материал выгружается в направлении вперед на транспортное средство, движущееся впереди. Оператору фрезерной машины требуется подавать сигнал водителю транспортного средства относительно того, когда транспортное средство должно продолжать движение вперед, и когда оно должно останавливаться. Это приводит к проблемам по причине того, что оператору в основном требуется сконцентрироваться на процессе фрезерования и в то же время требуется избегать столкновения с транспортным средством, движущимся впереди.
Дополнительная проблема состоит в том, что оператору фрезерной машины также необходимо заниматься загрузкой погрузочной поверхности посредством регулировки угол поворота, угол подъема и скорость транспортировки последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки и таким образом отвлекаться от своей фактической задачи осуществления операции фрезерования.
В случае фрезерной машины с задней загрузкой, также возникают проблемы с координированием фрезерной машины с транспортным средством, особенно когда транспортному средству требуется двигаться позади фрезерной машины задним ходом. Еще более высокий уровень стресса приходится на оператора фрезерной машины, так как ему с одной стороны требуется управлять операцией фрезерования при продвижении вперед, и требуется отслеживать загрузку транспортного средства позади фрезерной машины, если смотреть в направлении движения, требуется регулировать угол поворота, угол подъема и/или скорость транспортировки транспортировочного конвейерного устройства, а с другой требуется передавать необходимую информацию водителю транспортного средства.
Из DE 102012215013 A известен блок обнаружения и управления, способный непрерывно локализовать положение погрузочной поверхности и/или транспортировочного конвейера транспортировочного конвейерного устройства посредством системы регистрации изображений, в которой данные об изображениях служат для определения положения погрузочной поверхности относительно рамы машины или относительно поворачивающегося транспортировочного конвейера.
Размещение сфрезерованного материала на погрузочной поверхности может непрерывно регулироваться автоматически с помощью системы обнаружения и управления таким образом, чтобы сфрезерованный материал выгружался в центр погрузочной поверхности или в другой задаваемой точке падения в пределах погрузочной поверхности.
При практической работе фрезерной машины, система регистрации изображений может выходить из строя за счет погодных условий, ветвей деревьев, яркого света или других воздействий и, таким образом, может по меньшей мере временно, ухудшать процесс автоматического управления.
Вследствие этого, задачей изобретения является создание самоходной фрезерной машины, а также способа выгрузки сфрезерованного материала из фрезерной машины, который предназначен для улучшения надежности процесса управления и избегания ошибок управления.
Упомянутая выше задача решается с помощью признаков по пунктам 1, 11 и 15 формулы изобретения, соответственно.
Изобретение преимущественно характеризуется содержанием в блоке обнаружения и управления устройства анализа, которое анализирует дефекты или ошибки в изображении.
Предпочтительно устройство анализа характеризуется генерированием предупреждающего сигнала или управляющего сигнала в случае дефектов или ошибок. Таким образом, оператор фрезерной машины своевременно получает предупреждение, были ли выявлены в изображении дефект или ошибка, так что его внимание может быть сконцентрировано в частности в отношении отслеживания процесса автоматического управления.
Управляющий сигнал может использоваться, например, для остановки операции фрезерования или для генерирования сигнала экстренной остановки.
В частности может быть предусмотрено содержание в устройстве анализа устройства обнаружения фиксированного изображения, которое отслеживает неосуществление или изменение с течением времени сигналов изображения пикселей цифрового изображения.
Таким образом, оператор немедленно получает информацию в случае неосуществления сигналов изображения или в случае фиксации сигналов изображения, или происходит прямое вмешательство в контроллер фрезерной машины.
Устройство обнаружения фиксированного изображения может отслеживать изменение с течением времени всех или части пикселей цифрового изображения.
Устройство обнаружения фиксированного изображения также может отслеживать изменение с течением времени метки, присутствующей в поле изображения, при этом указанная метка может изменяться определенным образом. В данной конструкции, метка находится, например, в фиксированном положении относительно рамы машины или в фиксированном положении относительно транспортировочного конвейера таким образом, чтобы она обнаруживалась системой регистрации изображений. В данном расположении, метка разработана определенным образом с целью обеспечить системе регистрации изображений возможность идентификации и отслеживания метки.
Образованная метка может изменять свой внешний вид с течением времени, например, посредством поворота, так что в случае остановки движения поворота может выявляться зафиксированное изображение. Это является полезным в частности, если ни фрезерная машина, ни транспортное средство не находятся в движении.
В качестве альтернативы, устройство обнаружения фиксированного изображения также может сравнивать цифровое изображение двух датчиков, направленных на одно и то же поле изображения и, по меньшей мере, выявлять зафиксированное изображение в случае, когда одно из двух изображений зафиксировано.
Предпочтительный вариант осуществления характеризуется отслеживанием устройством анализа пикселей изображения для неизменной информация об изображении и подачей предупреждающего сигнала или управляющего сигнала, если часть информации об изображении остается неизменной в течение задаваемого периода времени.
Дополнительно может быть предусмотрено, независимо от обнаружения фиксированных изображений, обнаружение устройством анализа, посредством метки, присутствующей в поле изображения, нежелательного изменения положения по меньшей мере одного датчика системы регистрации изображений относительно рамы машины или относительно транспортировочного конвейера. Указанная метка может отличаться от метки для обнаружения фиксированных изображений. Если метка находится не в оговоренном положении в пределах поля изображения, можно заключить, что датчик или система регистрации изображений, соответственно, изменила свое первоначальное положение, например, в результате столкновения с объектом, и что поле изображения более не обнаруживает первоначально установленное поле изображения.
Согласно дополнительной дальнейшей разработке изобретения, для устройства анализа с целью обнаружение яркого света предусмотрено отслеживание наличия максимального сигнала, по меньшей мере, в части пикселей изображения и в случае яркого света подача предупреждающего сигнала или управляющего сигнала.
В данной конфигурации, в случае яркого света может быть осуществлено электронное или оптическое затемнение датчика.
Альтернативный вариант осуществления в случае яркого света характеризуется поворотом датчика блоком обнаружения и управлением на небольшую угловую величину без значительного изменения обнаруженного поля изображения.
Кроме того, могут анализироваться данные об изображениях для осуществления определения, как и в какой степени наполнена погрузочная поверхность. Регулирование скорости транспортировки и/или положения разгрузочного конца транспортировочного конвейера или точки падения сфрезерованного материала, соответственно, относительно погрузочной поверхности обеспечивает возможность равномерной загрузки погрузочной поверхности. Состояние заполнения погрузочной поверхности может выявляться и анализироваться системой регистрации изображений, и скорость транспортировки и/или положение разгрузочного конца транспортировочного конвейера относительно погрузочной поверхности может непрерывно регулироваться для того, чтобы равномерно загружать погрузочную поверхность и/или в соответствии с оговоренной программой погрузки.
Упомянутая выше задача также решается с помощью признаков по п. 11.
В соответствии со способом согласно изобретению, предусмотрено, что для выгрузки снятого сфрезерованного материала самоходной фрезерной машины на погрузочную поверхность транспортного средства фрезерной машиной управляют для операции перемещения и фрезерования, сфрезерованный материал, снятый рабочим барабаном, выгружают на погрузочную поверхность транспортного средства посредством поворотного транспортировочного конвейера, при этом изменяющееся положение погрузочной поверхности транспортного средства относительно рамы машины или относительно транспортировочного конвейера непрерывно отслеживают блоком обнаружения и управления, содержащим систему регистрации изображений, которая используется для непрерывного генерирования по меньшей мере одного цифрового изображения по меньшей мере погрузочной поверхности.
Может быть предусмотрено, что для обнаружения частичного дефекта в изображении, отслеживают группу связанных пикселей изображения для неизменной информация об изображении, и, если часть информации об изображении, например, группа связанных пикселей изображения, остается неизменной в течение задаваемого периода времени, подают предупреждающий сигнал или управляющий сигнал, или что временные дефекты или ошибки информации об изображении анализируют посредством выявления области связанных пикселей изображения и/или фокусирования ее состояния и/или направления движения связанных пикселей изображения внутри поля изображения.
Далее, варианты осуществления изобретения иллюстрируются более подробно со ссылкой на чертежи.
Далее показано:
Фиг. 1 - дорожная фрезерная машина с передней погрузкой,
Фиг. 2 - дорожная фрезерная машина с задней погрузкой,
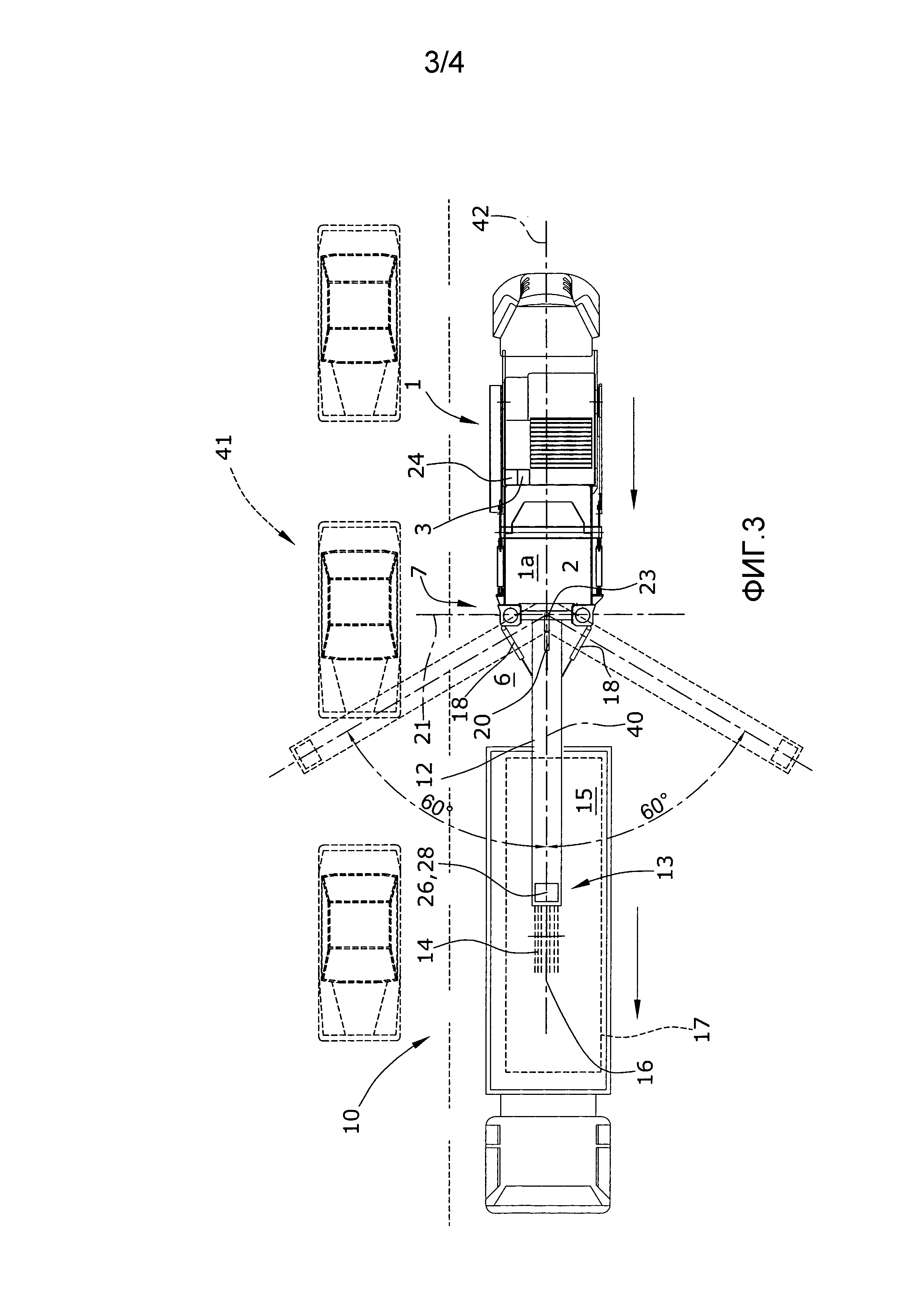
Фиг. 3 - вид сверху фрезерной машины согласно Фиг. 1 и
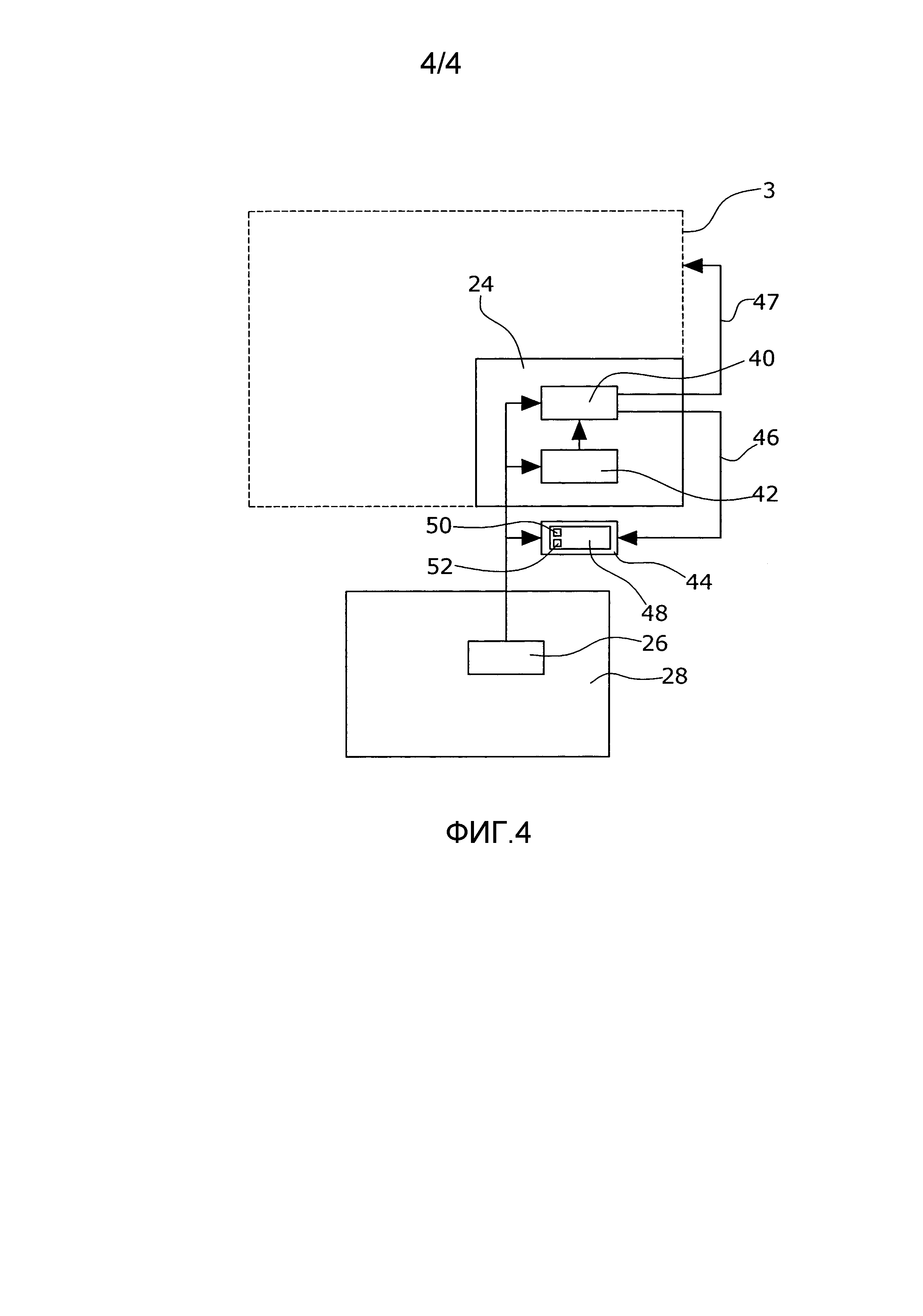
Фиг. 4 - принципиальная схема контроллера и системы регистрации изображений.
Фиг. 1 изображает фрезерную машину с использованием в качестве примера дорожной фрезерной машины 1a с передней погрузкой. Дорожная фрезерная машина 1 содержит раму 2 машины, которая поддерживается на шасси 4, состоящем, например, из гусеничных входящих в зацепление с землей блоков или колес, при этом указанное шасси 4 связано с рамой 2 машины посредством по меньшей мере трех устройств регулирования высоты в форме подъемных колонн 5. Как можно заключить из Фиг. 1, в варианте осуществления оговорены четыре подъемные колонны 5, которые могут использоваться для приведения рамы 2 машины в задаваемую плоскость, проходящую предпочтительно параллельно поверхности 6 дороги, которая поддерживает гусеничные входящих в зацепление с землей блоки или колеса шасси 4.
Дорожная фрезерная машина, показанная на Фиг. 1, содержит, в продольном направлении фрезерной машины 1a, рабочий барабан 22 между гусеничными входящими в зацепление с землей блоками шасси 4.
Фрезерные машины 1a, 1b могут содержать гусеничные входящие в зацепление с землей блоки и/или колеса. Рабочий барабан может регулироваться по высоте посредством подъемных колонн 5, поддерживающих раму 2 машины, или относительно рамы 2 машины.
Другие конструкции фрезерной машины 1b также могут демонстрировать рабочий барабан 22, например, на высоте задних гусеничных входящих в зацепление с землей блоков или колес шасси 4.
Транспортировочное конвейерное устройство по меньшей мере с одним транспортировочным конвейером 11, 12 для транспортировки снятого фрезой сфрезерованного материала также может располагаться на переднем конце 7 или заднем конце 8 фрезерной машины 1a, 1b.
Фиг. 2 в качестве примера изображает фрезерную машину 1b с задней загрузкой, при этом транспортное средство 10 движется позади фрезерной машины задним ходом.
При условии, что со стороны рядом с фрезерной машиной 1a, 1b доступно достаточное пространство, транспортное средство 10 также может передвигаться вслед за фрезерной машиной 1 при продвижении вперед, как показано на Фиг. 3. Направления движения соответствующих транспортных средств на фигурах 1-3 обозначены стрелками.
В варианте осуществления, показанном на Фиг. 1, сфрезерованный материал, снятый рабочим барабаном 22, выгружается на погрузочную поверхность 15 транспортного средства 10 посредством первого постоянного установленного транспортировочного конвейера 11 транспортировочного конвейерного устройства, который передает сфрезерованный материал 14 на второй поворачивающейся транспортировочный конвейер 12. В результате скорости транспортировочного конвейера 12, сфрезерованный материал 14 не выгружается немедленно на конце транспортировочного конвейера 12, но сфрезерованный материал следует по параболической траектории, так что точка падения 16 на погрузочной поверхности 15 находится на расстоянии от свободного конца 13 транспортировочного конвейера 12. Транспортировочный конвейер 12 может поворачиваться из нейтрального положения влево или вправо посредством блоков 18 поршневых цилиндров для того, чтобы иметь возможность выгрузки сфрезерованного материала 14 на погрузочную поверхность 15, даже при движении на повороте или в случае транспортного средства 10, движущегося по смещенной колее. В дополнение, водитель транспортного средства фрезерной машины 1a, 1b посредством блока 20 поршневых цилиндров может регулировать угол подъема транспортировочного конвейера 12. Угол подъема оказывает влияние на параболическую траекторию сфрезерованного материала 14 и на положение точки 16 падения, так как имеется скорость транспортировки транспортировочного конвейера 12.
Отрегулированный теперь угол подъема вокруг горизонтальной первой оси 21 или угол поворота вокруг вертикальной второй оси 23, соответственно, сообщаются в систему 24 обнаружения и управления, которая дополнительно содержит по меньшей мере одну систему 28 регистрации изображений, содержащую по меньшей мере один датчик 26, или связана с ним, при этом указанный датчик 26 непрерывно обнаруживает положение погрузочной поверхности 15 и/или транспортировочного конвейера 12. Указанный по меньшей мере один датчик 26 может быть расположен, например, на фрезерной машине 1a, 1b, на конце, обращенном к транспортировочному конвейеру 12, и/или на свободном конце 13 транспортировочного конвейера 12. Кроме того, датчик 26, предпочтительно датчик изображения, может быть расположен ниже или, как показано на фигурах, выше транспортировочного конвейера 12, а также в боковом направлении на обеих сторонах транспортировочного конвейера 12.
Блок 24 обнаружения и управления непрерывно обнаруживает положение погрузочной поверхности 15 и/или последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки посредством системы 28 регистрации изображений или не оптической электронной системы размещения, которая поставляет данные для определения положения погрузочной поверхности 15 относительно рамы 2 машины или транспортировочного конвейера 12. По меньшей мере одно цифровое изображение 48, предоставляемое системой 28 регистрации изображений, может оцениваться посредством методов анализа изображений, которые известны сами по себе.
Блок 24 обнаружения и управления может быть встроен в контроллер 3 для операции перемещения и фрезерования или по меньшей мере может быть с ним связан для того, чтобы в случае возникновения необходимости также получать данные о скорости движения и/или обнаруженном угле поворота рулевого колеса фрезерной машины 1a, 1b и скорости транспортировки транспортировочного конвейера 12.
Блок 24 обнаружения и управления локализует изменяющееся положение погрузочной поверхности 15 транспортного средства 10 и транспортировочного конвейера 12 относительно рамы 2 машины, и может непрерывно и автоматически регулировать расположение точки падения 16 сфрезерованного материала 14 посредством угла поворота и/или угла подъема и/или скорости транспортировки транспортировочного конвейера 12, так чтобы выгружаемый сфрезерованный материал 14 падал, по меньшей мере, в пределах погрузочной поверхности 15. В качестве альтернативы, изменяющееся положение погрузочной поверхности 15 транспортного средства 10 также может непрерывно определяться относительно транспортировочного конвейера 12 для того, чтобы предпочтительно осуществлять процесс автоматического управления.
Для улучшения надежности процесса управления и избегания ошибок управления, блок 24 обнаружения и управления содержит анализирующее устройство 40, которое анализирует дефекты или ошибки в цифровом изображении 48, которое генерируется системой 28 регистрации изображений, содержащей по меньшей мере один датчик 26.
Система 28 регистрации изображений может выйти из строя в результате погодных условий, например, в результате качающихся ветвей деревьев, в результате яркого света или также в результате электричества и неисправности системы, так что автоматическое управление машиной и в частности автоматическое регулирование угла поворота транспортировочного конвейера 12, таким образом, по меньшей мере временно может быть ухудшено.
Анализирующее устройство 40 может анализировать пиксели цифрового изображения 48, генерируемого датчиком 26, и в случае обнаруженных дефектов или ошибок, генерировать предупреждающий сигнал или управляющий сигнал 46, который может непосредственно влиять на контроллер 3, или генерировать звуковой или зрительный предупреждающий сигнал, например, на экране 44, который отображает цифровое изображение 48 для оператора фрезерной машины 1.
В случае предупреждающего сигнала может быть привлечено внимание оператора, так что оператор может изучать и отслеживать процесс автоматического управления при наличии предупреждающего сигнала 46.
В качестве альтернативы, также может быть прямое вмешательство в контроллер 3 посредством управляющего сигнала 47, генерируемого анализирующим устройством 40 для того, чтобы, например, остановить операцию фрезерования или для того, чтобы остановить транспортировочный конвейер 12 или для того, чтобы сгенерировать сигнал экстренной остановки.
Анализирующее устройство 40 дополнительно может быть связано с устройством 42 обнаружения фиксированного изображения, которое отслеживает неосуществление или изменение с течением времени сигналов изображения пикселей изображения датчика 26 в цифровом изображении 48.
Устройство 42 обнаружения фиксированного изображения также может отслеживать изменение с течением времени метки 50, присутствующей в поле цифрового изображения 48 и изменяющейся определенным образом. Указанная метка 50 предназначена для изменения с течением времени в оговоренном ритме, так что зафиксированное изображение может быть идентифицировано, если не возникает указанное изменение метки 50 в определенной секции поля изображения.
В случае наличия двух датчиков 26, направленных на одно и то же поле изображения, зафиксированное изображение может также быть обнаружено, если изображение 48 одного датчика отличается от другого изображения 48 второго датчика.
Независимо от обнаружения фиксированных изображений, анализирующее устройство 40 может также отслеживать пиксели изображения по меньшей мере одного датчика 26 для неизменной информации об изображении и подавать предупреждающий сигнал или управляющий сигнал 46, если часть информации об изображении остается неизменной в течение оговоренного периода времени. Это может произойти, например, если часть датчика 26 закрыта, например, листьями.
Независимо от обнаружения фиксированных изображений, дополнительно может анализироваться посредством анализирующего устройства 40, имеется ли нежелательное изменение в положении по меньшей мере одного датчика 26.
В связи с этим, в поле изображения 48 может быть оговорена вторая метка 52, координаты которой внутри поля изображения отслеживаются. Если положение метки 52 в пределах поля изображения изменяется, датчик изображения 26 изменился в результате, например, столкновения с объектом.
Должно быть понятно, что для данных целей также может использоваться изменяющаяся метка 50.
Метки 50, 52 расположены в фиксированном положении на раме машины или в фиксированном положении относительно транспортировочного конвейера таким образом, чтобы они обнаруживались полем изображения датчика 26.
Анализирующее устройство 40 независимо от обнаружения фиксированных изображений также может определять, подвергается ли система 28 регистрации изображений воздействию яркого света. В связи с этим, отслеживается максимальный сигнал, по меньшей мере, в части пикселей изображения, при этом анализирующее устройство 40 в случае яркого света подает предупреждающий сигнал или управляющий сигнал.
В случае яркого света, может быть осуществлено электронное или оптическое затемнение датчика 26 или его оптической системы.
В качестве альтернативы, в случае яркого света также может быть оговорен поворот датчика 26 или камеры, в которой заключен датчик 26, соответственно, на небольшую угловую величину без значительного изменения обнаруженного поля изображения. Указанное небольшое поворотное движение может быть снова изменено на обратное в случае прекращения яркого света.
Должно быть понятно, что датчик 26 или система 28 регистрации изображений, соответственно, проиллюстрирован только схематично в положении выше транспортировочного конвейера 12, показанного на фигурах 1 и 2, и что система 28 регистрации изображений также может располагаться ниже или в сторону транспортировочного конвейера 12 или на фрезерной машине 1.
Конкретно, на обеих сторонах транспортировочного конвейера 12 также могут располагаться две системы 28 регистрации изображений, и/или может использоваться система 28 регистрации изображений, которая содержит стерео камеру.
В данном расположении, система камер может содержать оптические устройства (линзы типа рыбий глаз), которые допускают угол изображения до 180°, или снабжены линзами, имеющими отличительный признак в виде изменяющейся фокальной длины.
Блок 24 обнаружения и управления также может осуществлять задачу заполнения погрузочной поверхности 15 равномерным образом. Для данной цели может быть оговорена программа погрузки для того, чтобы загружать погрузочную поверхность 15 в соответствии с предварительно заданной программой. В данном контексте, состояние заполнения на погрузочной поверхности 15 может выявляться и анализироваться системой 28 регистрации изображений для того, чтобы непрерывно регулировать скорость транспортировки и/или положение разгрузочного конца 13 транспортировочного конвейера 12 относительно погрузочной поверхности 15.
Реферат
В самоходной фрезерной машине, содержащей раму машины, контроллер для операций перемещения и фрезерования, рабочий барабан, транспортировочный конвейер, поворотный относительно рамы машины, при этом транспортировочный конвейер выгружает сфрезерованный материал в точку падения на погрузочной поверхности других транспортных средств. Контроллер содержит блок обнаружения и управления, который отслеживает изменяющееся положение погрузочной поверхности транспортного средства системой регистрации изображений, содержащей по меньшей мере один датчик, который непрерывно генерирует по меньшей мере одно цифровое изображение, по меньшей мере, погрузочной поверхности, блок обнаружения и управления, содержащий анализирующее устройство, которое обнаруживает дефекты или ошибки в изображении, генерируемом указанным по меньшей мере одним датчиком путем анализа пикселей цифрового изображения. 3 н. и 12 з.п. ф-лы, 4 ил.
Комментарии